Изобретение относится к механизмам, применяемым в технике для получения заданного движения выходного звена, и может быть использовано, в частности, в медицине при проведении лапароскопических операций.
Известна роботизированная хирургическая система «da Vinci» [А.В. Федоров, А.Г. Кригер, С.В. Берелавичус, М.Г. Ефанов, Д.С. Горин. Робот-ассистированные операции в абдоминальной хирургии. Хирургия. Журнал им. Н.И. Пирогова, 2010, №1, С. 16-21]. Данная система применяется при проведении ряда хирургических операций. Ее недостатком является достаточно большой вес (около 500 кг) и наличие множества приводов, что усложняет контроль данного робота и может привести к сбоям в его работе.
Известен также механизм для воспроизведения пространственных кривых [Патент RU №2309051 МПК B43L 11/00, опубл. 27.10.2007], включающий стойку, кривошип, шатун, выполненный в виде винта, гайку с жестко установленным на ней элементом, воспроизводящим пространственную кривую, и коромысло. Кинематические пары между стойкой и кривошипом, кривошипом и шатуном, стойкой и коромыслом выполнены вращательными с параллельными осями, а кинематическая пара между гайкой и коромыслом выполнена вращательной с осью, расположенной в перпендикулярной плоскости к осям остальных вращательных кинематических пар и совпадающей с продольной осью шатуна, образующего винтовую кинематическую пару с гайкой. Механизм обладает одной степенью подвижности, движения всех его звеньев контролируются единственным приводом. Механизм позволяет воспроизводить пространственную винтовую траекторию с криволинейной осью.
Данный механизм является наиболее близким к заявляемому изобретению и принимается за прототип предлагаемого устройства. Недостатком прототипа является то, что выходным звеном в нем является гайка. В связи с тем, что расстояние от вращательной пары кривошип-шатун до гайки в процессе работы механизма является переменным, это требует выполнения элемента, воспроизводящего пространственную кривую, достаточно длинным для того, чтобы исключить пересечение воспроизводимой кривой с шатуном. Вместе с тем, увеличение длины элемента будет способствовать увеличению его веса и может привести к дополнительным инерционным нагрузкам. Недостатком данного механизма также является невозможность его применения при выполнении хирургических операций в связи с винтовым движением выходного звена.
Технической проблемой, решаемой предлагаемым изобретением, является расширение функциональных возможностей прототипа путем введения в его состав дополнительных подвижных звеньев с целью получения требуемого движения выходного звена.
Данная проблема решается тем, что, предложен пространственный механизм для захвата, удержания и перемещения объектов, включающий стойку, кривошип, винтовой шатун, гайку и коромысло, в котором кинематические пары между стойкой и кривошипом, кривошипом и винтовым шатуном, стойкой и коромыслом выполнены вращательными с параллельными осями, а кинематическая пара между гайкой и коромыслом выполнена вращательной с осью, лежащей в перпендикулярной плоскости к этим осям и совпадающей с продольной осью винтового шатуна, образующего с гайкой винтовую кинематическую пару, согласно изобретению, механизм снабжен дополнительными шатуном и коромыслом, образующими между собой вращательную кинематическую пару, и выходным звеном с приспособлением для захвата и удержания объекта, входящим в поступательную кинематическую пару с дополнительным шатуном и в сферическую кинематическую пару со стержнем, жестко установленным на гайке, причем оси кинематических пар между выходным звеном и дополнительным шатуном, дополнительными коромыслом и шатуном, стойкой и дополнительным коромыслом пересекаются в одной точке, при этом дополнительные шатун и коромысло выполнены сферическими. Кроме этого, приспособление для захвата и удержания объектов выполнено в виде схвата.
Технический эффект, получаемый при реализации изобретения, заключается в расширении функциональных возможностей прототипа путем введения в его состав дополнительных подвижных звеньев, шатуна и коромысла, с целью получения требуемого движения выходного звена. Кроме этого, появляется возможность применения данного механизма при выполнении хирургических операций, так как траектория движения выходного звена не пересекается с траекторией движения подвижных звеньев.
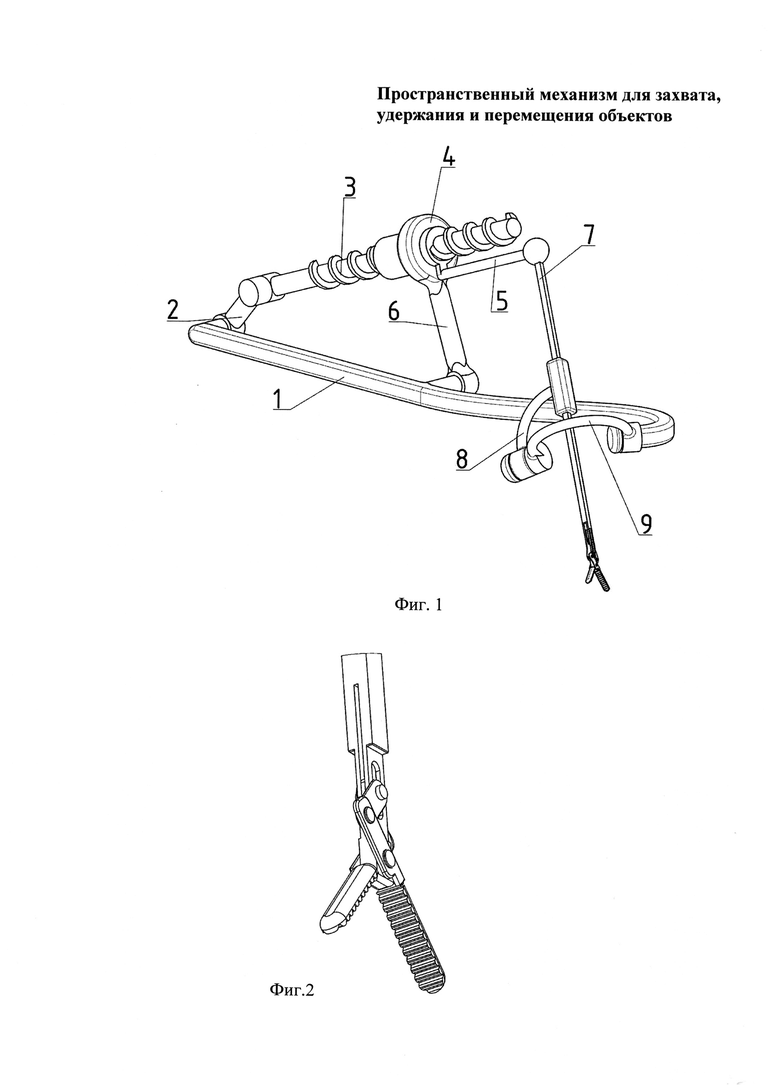
Предлагаемое изобретение проиллюстрировано чертежом, где на фигуре 1 показан пространственный механизм для захвата, удержания и перемещения объектов, а на фигуре 2 - приспособление для захвата и удержания объекта, выполненного в виде схвата.
Механизм для захвата, удержания и перемещения объектов состоит из стойки 1, кривошипа 2, винтового шатуна 3, гайки 4 с жестко установленным на ней стержнем 5, коромысла 6, выходного звена 7, дополнительных шатуна 8 и коромысла 9.
Кинематические пары звеньев 1-2, 2-3 и 5-6 выполнены вращательными с параллельными осями. Кинематическая пара звеньев 4-6 выполнена вращательной с осью, лежащей в перпендикулярной плоскости к осям пар звеньев 1-2, 2-3 и 5-6 и совпадающей с продольной осью шатуна 3, образующего винтовую кинематическую пару звеньев 3-4 с гайкой 4. Кинематическая пара звеньев 5-7 выполнена сферической, пара звеньев 7-8 выполнена поступательной, а пары звеньев 8-9 и 9-1 выполнены вращательными.
На конце выходного звена 7 установлено приспособление для захвата и удержания объектов, выполненное в виде схвата.
Дополнительные шатун 8 и коромысло 9 выполнены сферическими, а оси кинематических пар звеньев 7-8, 8-9 и 9-1 пересекаются в одной точке. Данная конструктивная особенность предлагаемого механизма имеет принципиальное значение и обеспечивает работоспособность механизма.
Принцип работы механизма заключается в следующем. Задавая вращение кривошипу 2, винтовой шатун 3 начнет вкручиваться в гайку 4, тем самым, приводя ее в движение. При этом длина между кинематическими парами 2-3 и 3-4 будет переменной. Стержень 5, жестко соединенный с гайкой 4, передаст движение выходному звену 7 через кинематическую пару звеньев 5-7. Выходное звено 7, ориентируемое в пространстве элементом 5, дополнительным шатуном 8 и дополнительным коромыслом 9, будет направлять приспособление для захвата и удержания объекта по заданной пространственной траектории.
Изобретение может быть использовано при проведении операций по перемещению объектов по заданным траекториям, в том числе применяться при выполнении хирургических операций. При этом выходное звено перемещается по траектории, которая не пересекается другими звеньями механизма в процессе его работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДЛЯ ВЫЧЕРЧИВАНИЯ ПРОСТРАНСТВЕННЫХ КРИВЫХ | 2017 |
|
RU2668414C1 |
| Устройство для перемешивания | 2023 |
|
RU2799476C1 |
| ВИНТОРЫЧАЖНЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2018 |
|
RU2687407C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2008 |
|
RU2369430C1 |
| МЕХАНИЗМ ДЛЯ ВОСПРОИЗВЕДЕНИЯ ПРОСТРАНСТВЕННЫХ КРИВЫХ | 2005 |
|
RU2309051C2 |
| Устройство для перемешивания | 2022 |
|
RU2788075C1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН | 2019 |
|
RU2699695C1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
Изобретение относится к механизмам, применяемым в технике для получения заданного движения выходного звена, и может быть использовано, в частности, в медицине при проведении лапароскопических операций. Механизм содержит стойку, кривошип, винтовой шатун, гайку с жестко установленным на ней стержнем и коромысло. Механизм снабжен дополнительными шатуном и коромыслом, образующими между собой вращательную кинематическую пару, и выходным звеном с приспособлением для захвата и удержания объекта, входящим в поступательную кинематическую пару с дополнительным шатуном и в сферическую кинематическую пару со стержнем, жестко установленным на гайке. Причем оси кинематических пар между выходным звеном и дополнительным шатуном, дополнительными коромыслом и шатуном, стойкой и дополнительным коромыслом пересекаются в одной точке. При этом дополнительные шатун и коромысло выполнены сферическими. Кроме этого приспособление для захвата и удержания объектов выполнено в виде схвата. Изобретение направлено на расширение функциональных возможностей. 1 з.п. ф-лы, 2 ил.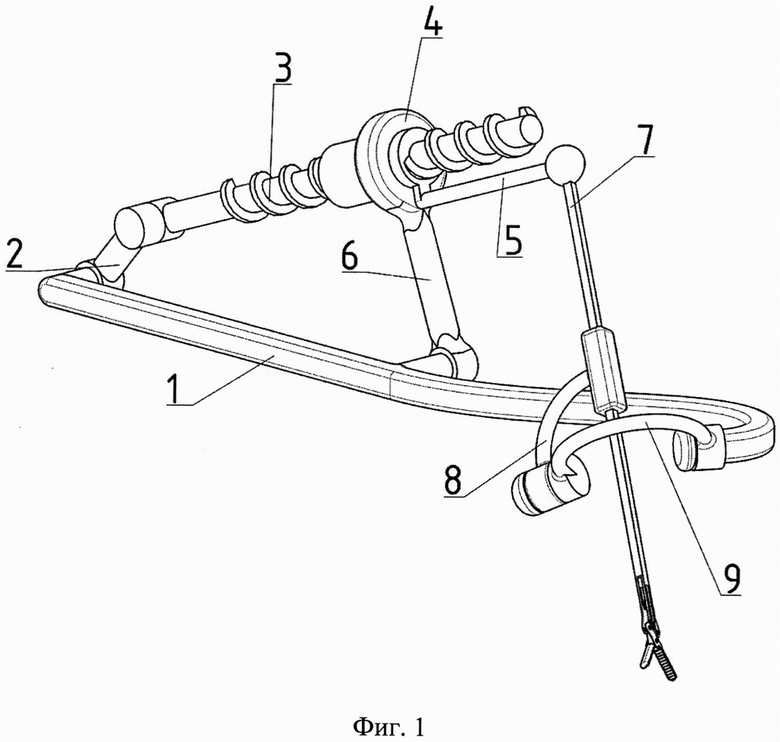
1. Пространственный механизм для захвата, удержания и перемещения объектов, включающий стойку, кривошип, винтовой шатун, гайку и коромысло, в котором кинематические пары между стойкой и кривошипом, кривошипом и винтовым шатуном, стойкой и коромыслом выполнены вращательными с параллельными осями, а кинематическая пара между гайкой и коромыслом выполнена вращательной с осью, лежащей в перпендикулярной плоскости к этим осям и совпадающей с продольной осью винтового шатуна, образующего с гайкой винтовую кинематическую пару, отличающийся тем, что он снабжен дополнительными шатуном и коромыслом, образующими между собой вращательную кинематическую пару, и выходным звеном с приспособлением для захвата и удержания объекта, входящим в поступательную кинематическую пару с дополнительным шатуном и в сферическую кинематическую пару со стержнем, жестко установленным на гайке, причем оси кинематических пар между выходным звеном и дополнительным шатуном, дополнительными коромыслом и шатуном, стойкой и дополнительным коромыслом пересекаются в одной точке, при этом дополнительные шатун и коромысло выполнены сферическими.
2. Пространственный механизм по п. 1, отличающийся тем, что приспособление для захвата и удержания объектов выполнено в виде схвата.
| МЕХАНИЗМ ДЛЯ ВОСПРОИЗВЕДЕНИЯ ПРОСТРАНСТВЕННЫХ КРИВЫХ | 2005 |
|
RU2309051C2 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| DE 2052861 B, 08.03.1979. | |||

