Область техники
Настоящее изобретение относится к устройству для тренировки ходьбы, имеющему подвижное основание, которое содержит, по меньшей мере, один приводной узел для перемещения подвижного основания, балочную систему, отходящую от этого подвижного основания, систему поддержки веса, обеспечивающую возможность, по меньшей мере частичного, подвешивания пользователя сверху на указанной балочной системе, датчик движения для распознавания движения пользователя и адаптированный блок управления, предназначенный для такого управления указанным приводным узлом(узлами) в ответ на движение пользователя, распознанное датчиком движения, чтобы подвижное основание следовало за пользователем в заданном диапазоне расстояний и в заданном диапазоне углов относительно направления движения пользователя.
Уровень техники
В документе WO 2012/107700 раскрыто устройство для тренировки ходьбы, имеющее подвижное основание, которое содержит приводной узел для перемещения этого подвижного основания, балочную систему, установленную на этом подвижном основании, систему поддержки веса, чтобы пользователь мог быть, по меньшей мере частично, подвешен сверху с помощью указанной балочной системы, датчик движения для распознавания движения пользователя и блок управления, выполненный с возможностью управления указанным приводным узлом в ответ на движение пользователя, распознанное датчиком движения, так, чтобы подвижное основание следовало за пользователем в заданном диапазоне расстояний и в заданном диапазоне углов относительно направления движения пользователя.
Таким образом, механические и управляющие признаки, позволяющие удерживать устройство для тренировки ходьбы в заданном диапазоне углов и расстояний относительно пользователя, известны из уровня техники.
Известные из уровня техники устройства так или иначе ограничены в определении каких-либо изменений направления движения пользователя.
Сущность изобретения
Таким образом, цель настоящего изобретения заключается в обеспечении устройства с признаками согласно ограничительной части пункта 1 формулы изобретения, отличающегося усовершенствованным определением изменений направления движения пользователя.
Следующая цель настоящего изобретения связана с проблемой значительной высоты традиционных устройств, что затрудняет их перемещение в здании из одного помещения в другое.
Далее, цель настоящего изобретения заключается в обеспечении более универсального применения устройства, т.е. в обеспечении возможности использовать устройство в качестве подъемника подъемных приспособлений, в то время как традиционные устройства предназначены только для тренировки ходьбы и не могут использоваться для подъема пользователя в стоячее положение из сидячего или лежачего положения в кровати или кресле.
В контексте настоящего изобретения поддержка веса пользователя может быть также, по меньшей мере, частичной. Она также может быть нулевой или почти нулевой в процессе нормальной ходьбы. Кроме того, крепление подвесной системы обеспечивает безопасную поддержку при отклонении, спотыкании и/или падении пользователя; в этих случаях поддержка веса увеличивается до полного веса тела.
С другой стороны, имеется возможность использовать устройство в качестве подъемника пользователя или в качестве передвижного крана, поддерживающего полный вес пользователя, как раскрыто в документе ЕР 241 096.
Устройство согласно настоящему изобретению может также использоваться на одном месте. В этом случае подвижное основание становится неподвижным основанием, а указанный приводной узел(узлы) адаптируется для приведения в действие бегущей дорожки, встроенной в неподвижное основание. Другими словами, особенности крепления подвесной системы для распознавания намерения поворота, регулировка высоты телескопических соединений и другие особенности могут использоваться в сочетании с неподвижным основанием, в частности, когда бегущая дорожка содержит две отдельные бегущие ленты - по одной для каждой ноги, так что различные скорости ленточных частей могут моделировать движение поворота. Далее, по меньшей мере, один приводной узел встроен в неподвижное основание для приведение в действие одной или двух лент бегущей дорожки. Блок управления выполнен с возможностью такого управления приводным узлом(узлами) в ответ на движение пользователя, распознанное датчиком движения, чтобы лента(ленты) бегущей дорожки совершала(совершали) относительное движение в поле зрения идущего пользователя в заданном диапазоне расстояний и в заданном диапазоне углов относительно направления движения пользователя, обеспечивая сохранение, по существу, вертикального положения пользователя на ленте(лентах) в подвесной системе, при нахождении непосредственно под боковыми балками балочной системы. Движение пользователя в устройстве с подвижным основанием подобно движению пользователя по бегущей дорожке на неподвижном основании, которое подвижно в смысле настоящего изобретения благодаря схеме ходьбы пользователя на подвижной опоре, создаваемой бегущей дорожкой. Направленное восприятие обеспечивает преимущество, если имеется не одна, а две ленты бегущей дорожки - по одной для каждой ноги пользователя.
Телескопическая регулировка высоты относится к любой регулировке удлинения, раздвигания, выдвижения или вытягивания, осуществляемой, например, линейными приводами, или сочетаниями цилиндров с поршнями/плунжерами, или устройствами с кулачковым управлением, обеспечивающим функцию регулировки высоты.
Дополнительные варианты осуществления настоящего изобретения раскрыты в зависимых пунктах формулы изобретения.
Краткое описание чертежей
Предпочтительные варианты осуществления настоящего изобретения раскрыты ниже со ссылкой на чертежи, цель которых - проиллюстрировать данные предпочтительные варианты осуществления изобретения, но не ограничить его. На чертежах представлены:
на фиг. 1 схематически показаны на виде спереди главные элементы устройства для тренировки ходьбы согласно одному из вариантов осуществления настоящего изобретения; пользователь прикреплен к устройству;
на фиг. 2 схематически показан вид сбоку устройства по фиг. 1;
на фиг. 3 схематически показаны в аксонометрии главные элементы устройства для тренировки ходьбы согласно другому варианту осуществления настоящего изобретения; причем частью устройства является ортез;
на фиг. 4 схематически показаны на виде спереди главные элементы устройства для тренировки ходьбы согласно еще одному варианту осуществления настоящего изобретения; причем пользователь прикреплен к устройству подвесной системой, отличающейся от изображенной на фиг. 1;
на фиг. 5 схематически показаны на виде спереди главные элементы устройства для тренировки ходьбы согласно еще одному варианту осуществления настоящего изобретения; причем пользователь прикреплен к устройству подвесной системой, отличающейся от изображенной на фиг. 1;
на фиг. 6 изображена схема устройства для тренировки ходьбы, показывающая расположение рамы и тросов в сочетании с механизмом разгрузки веса, согласно одному из вариантов осуществления настоящего изобретения;
на фиг. 7 изображена схема устройства для тренировки ходьбы, показывающая расположение рамы и тросов в сочетании с механизмом разгрузки веса, согласно фиг. 1;
на фиг. 8 изображена схема устройства для тренировки ходьбы, показывающая расположение рамы и тросов в сочетании с механизмом разгрузки веса, согласно дальнейшему варианту осуществления настоящего изобретения;
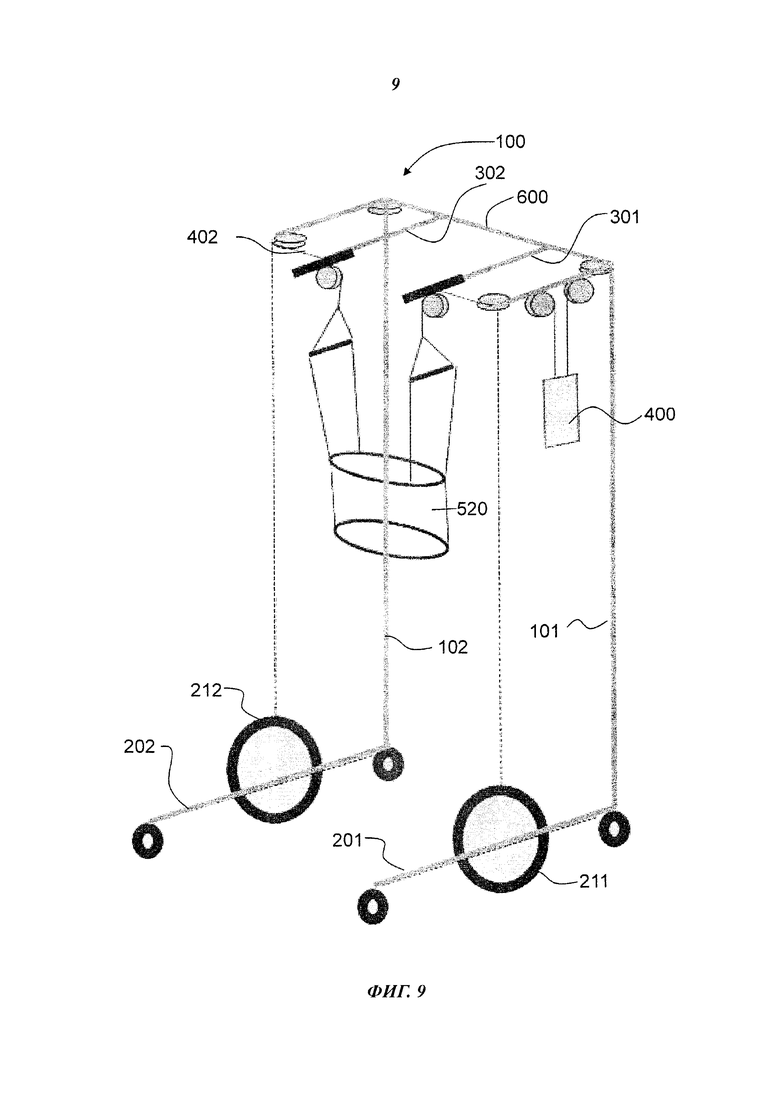
на фиг. 9 изображена схема устройства для тренировки ходьбы, показывающая расположение рамы и тросов в сочетании с механизмом разгрузки веса, согласно еще одному варианту осуществления настоящего изобретения;
на фиг. 10 изображена схема устройства для тренировки ходьбы, показывающая расположение рамы и тросов в сочетании с телескопическими механизмами регулировки, согласно другому варианту осуществления настоящего изобретения;
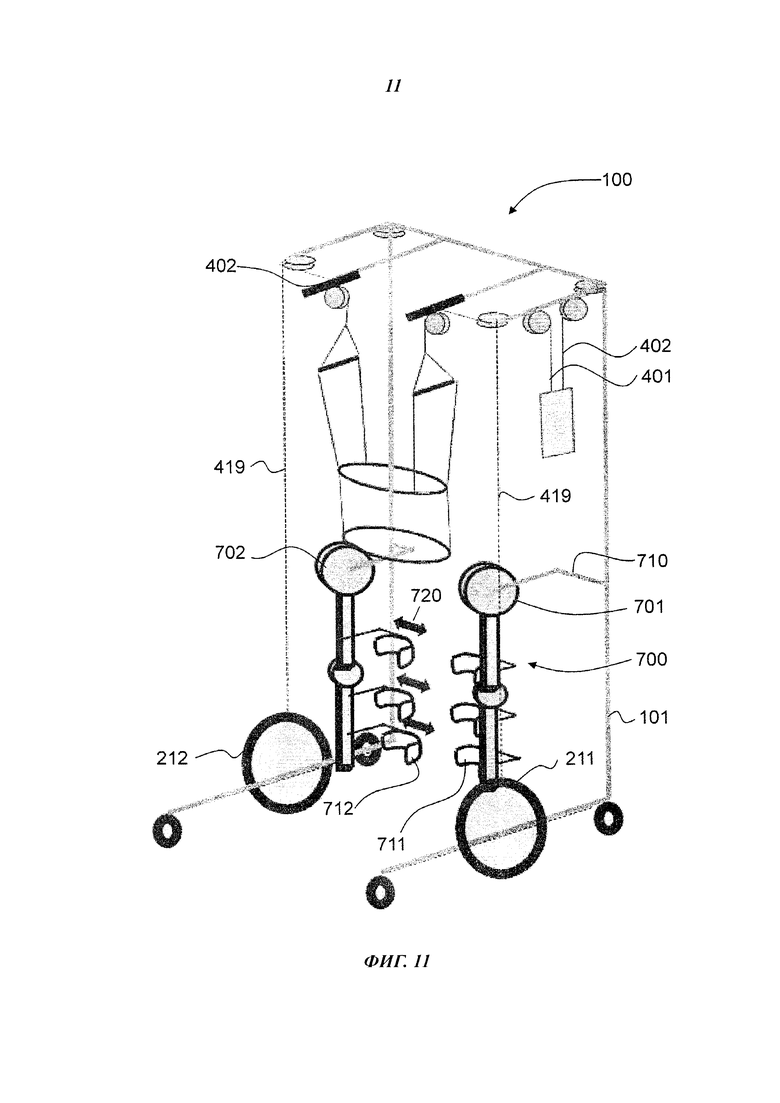
на фиг. 11 изображена схема устройства для тренировки ходьбы, показывающая расположение рамы и тросов в сочетании с встроенным ортезом, согласно еще одному варианту осуществления настоящего изобретения;
на фиг. 12 схематически показан принцип распознавания движения пользователя;
на фиг. 13 представлена схема блока управления устройства согласно настоящему изобретению;
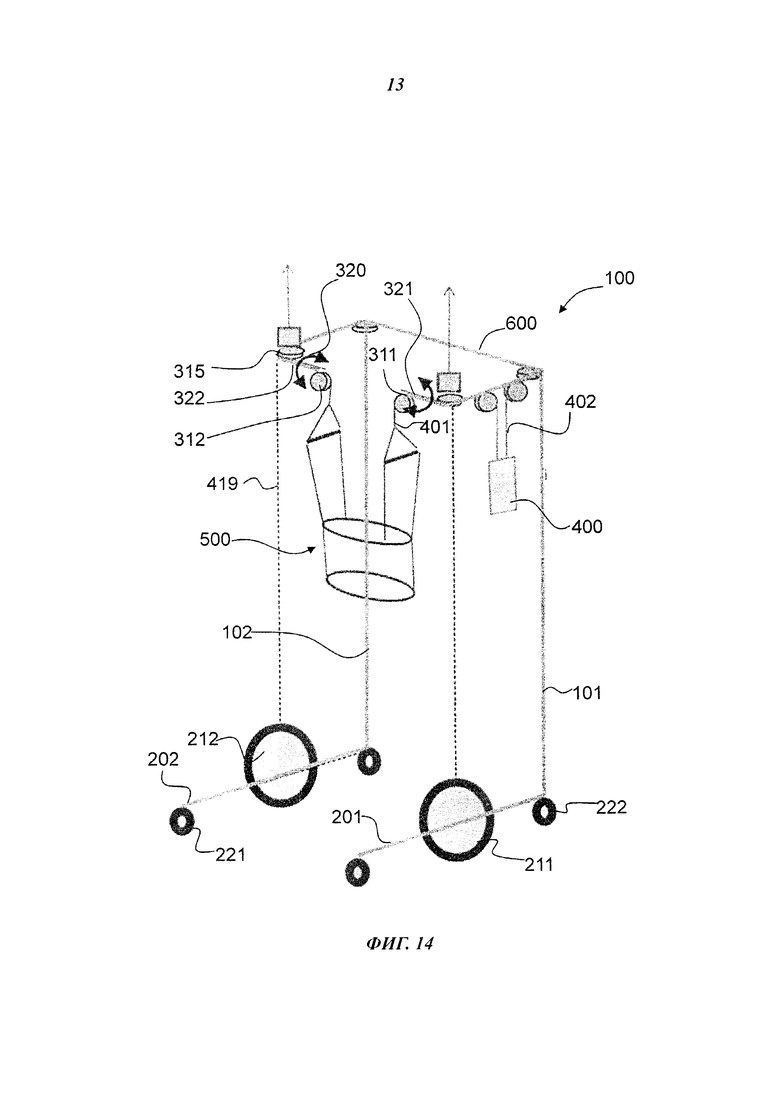
на фиг. 14 изображена схема устройства для тренировки ходьбы, показывающая другое расположение рамы и тросов в сочетании с механизмом разгрузки веса, согласно другому варианту осуществления настоящего изобретения;
на фиг. 15 изображена схема устройства для тренировки ходьбы, показывающая другое расположение рамы и тросов в сочетании с механизмом разгрузки веса, согласно еще одному варианту осуществления настоящего изобретения, в котором используется телескопический механизм для подъема пользователя и регулировки устройства по росту пользователя;
на фиг. 16 изображена схема устройства для тренировки ходьбы, показывающая другое расположение рамы и тросов в сочетании с механизмом разгрузки веса, согласно другому варианту осуществления настоящего изобретения, в котором устройство помещено над бегущей дорожкой;
на фиг. 17 более подробно показана балочная система вариантов осуществления по фиг. 1-5;
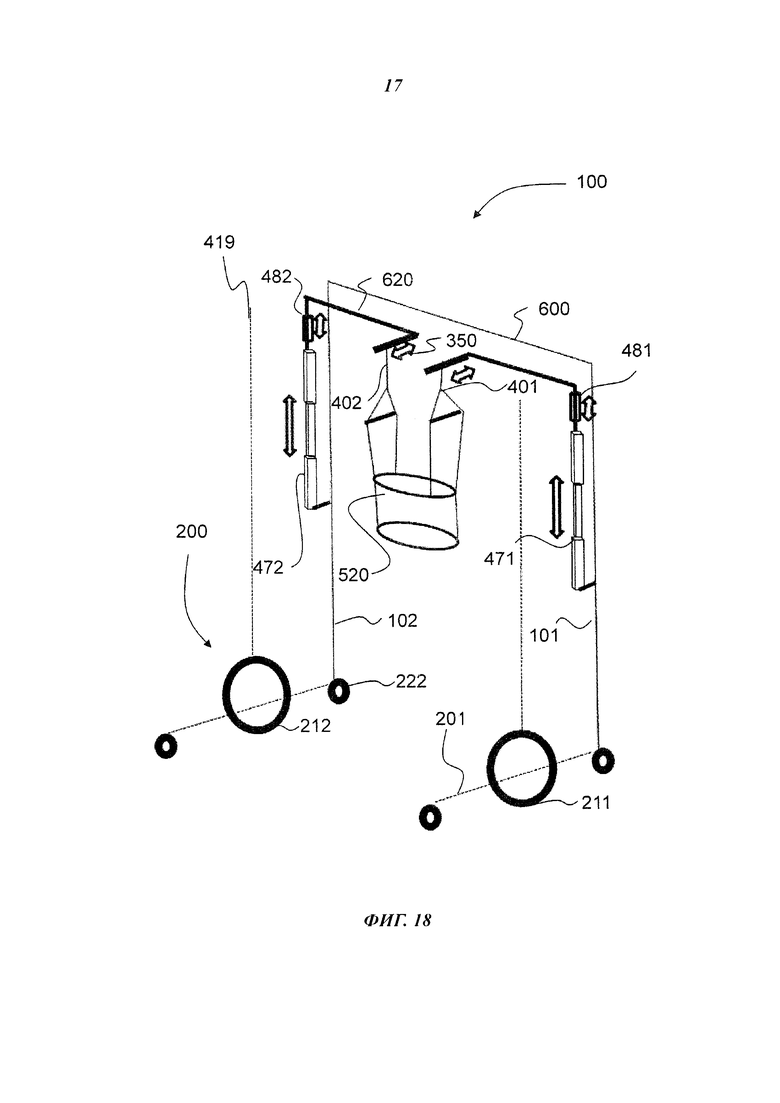
на фиг. 18 изображена схема устройства для тренировки ходьбы, показывающая расположение другой рамы фиксированного размера с тросами, в сочетании с механизмом разгрузки веса, согласно дальнейшему варианту осуществления настоящего изобретения; и
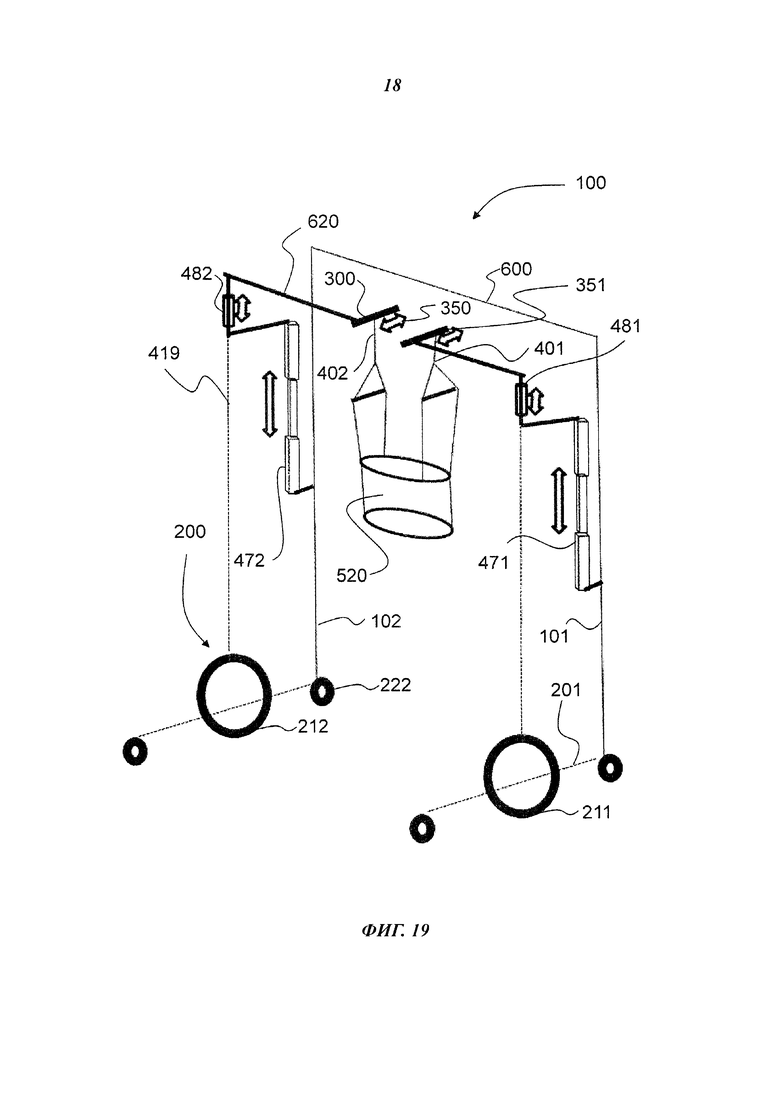
на фиг. 19 изображена схема устройства для тренировки ходьбы, показывающая расположение еще одной рамы фиксированного размера с тросами, в сочетании с механизмом разгрузки веса, согласно дальнейшему варианту осуществления настоящего изобретения.
Предпочтительные варианты осуществления изобретения
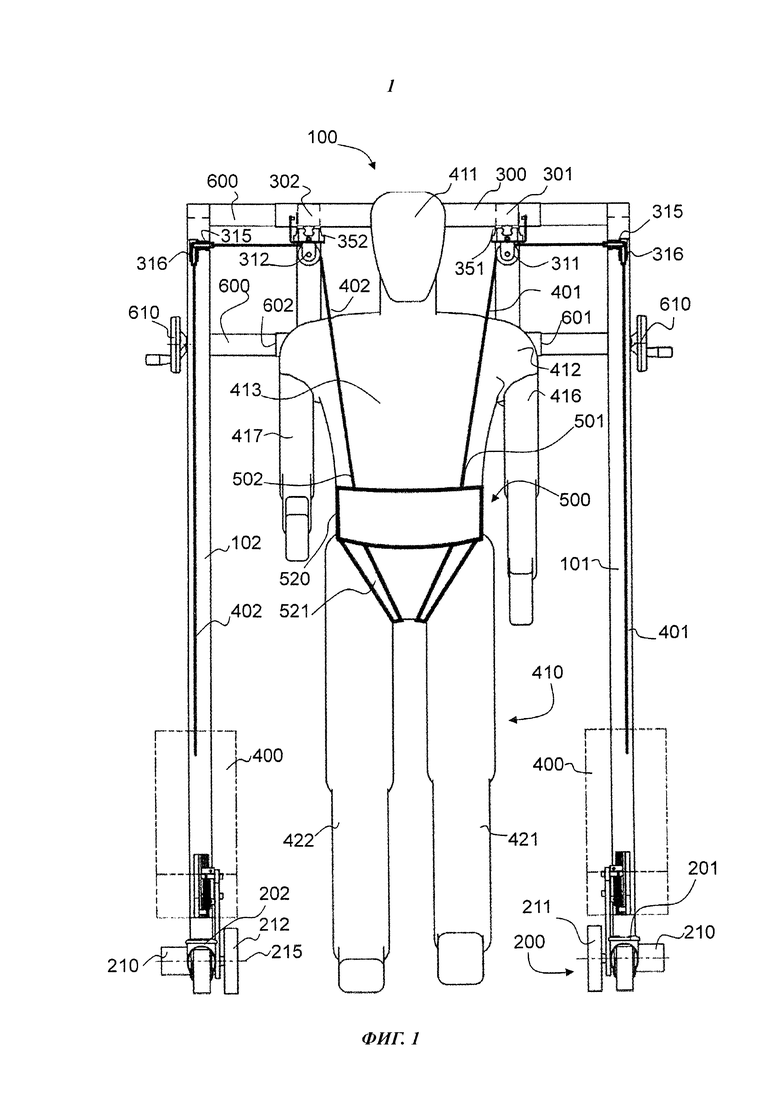
На фиг. 1 схематически показано на виде спереди устройство 100 для тренировки ходьбы согласно одному из вариантов осуществления настоящего изобретения, при этом пользователь 410 прикреплен к устройству 100. Устройство 100 имеет раму, содержащую левую стойку 101 и правую стойку 102 (левая и правая стороны - относительно пользователя устройства), соединенные друг с другом в верхней части рамы двумя траверсами 600; траверсы соединяют эти стойки 101 и 102, удерживая их на заданном расстоянии друг от друга и образуя пространство для размещения пользователя 410.
Предпочтительно, узел траверс 600 можно регулировать по ширине с помощью телескопических соединений 601 и 602, имеющихся на верхней и нижней траверсах 600. Наружные элементы телескопических соединений расположены в центральной части балки. Для регулировки ширины узла можно предусмотреть вращающиеся регулировочные маховики 610, действующие на передаточное устройство внутри полых траверс 600. Предпочтительно, длина узла траверс 600 между телескопическими точками 601 и 602 является регулируемой, чтобы плечи 412 пользователя располагались в устройстве под боковыми балками 301 и 302, как будет раскрыто ниже.
Преимуществом устройства является то, что голова 411 пользователя 410 может располагаться непосредственно перед траверсой 600, так что голова 411 может выступать над верхней частью устройства 100, как показано на фиг. 1.
На фиг. 2 схематически показан вид сбоку устройства по фиг. 1 с элементами, образующими левое основание 201 и правое основание 202 устройства 100. Каждое из оснований 201 и 202 содержит горизонтально расположенную балку. На свободных концах этой балки прикреплены переднее опорное колесо 221 и заднее опорное колесо 222. Они могут быть ориентированы в направлении балки или они могут быть прикреплены с возможностью поворота при вращении основания. Наличие двух параллельно расположенных элементов обеспечивает устойчивость устройства 100.
Два приводных узла 210 прикреплены, соответственно, к левому основанию 201 и к правому основанию 202, приводя в действие левое приводимое колесо 211 и правое приводимое колесо 212, расположенные на одной и той же горизонтальной оси 215. Эта горизонтальная ось 215 приводимых колес 211 и 212 предпочтительно лежит во фронтальной плоскости 420 пользователя 410, закрепленного в подвесной системе 500 устройства 100. Другими словами, центр тяжести пользователя 410 лежит, по существу, в плоскости, в основном, проходящей через ось 215, или вблизи от этой плоскости. Стойки 101 и 102 располагаются за указанной фронтальной плоскостью 420 - см. фиг. 2, т.е. за приводимыми колесами 211 и 212, так что они не попадают в поле зрения пользователя 410. Однако система поддержки веса 400 или механизм разгрузки веса предпочтительно размещается вблизи элементов основания 201 и 202, чтобы получить устойчивую конструкцию с низко расположенным центром тяжести.
Траверса 600 дополнительно содержит балочную систему 300, в которой левая боковая балка 301 и правая боковая балка 302 идут параллельно левому основанию 201 и правому основанию 202, соответственно. Другими словами, они ориентированы, по существу, перпендикулярно траверсам 600. Балочная система 300 прикреплена к верхней из двух траверс 600. Разумеется, узел траверс может содержать и только одну траверсу.
К расположенным под балками 301 и 302 направляющим 351 и 352 прикреплены шкивы 311 и 312. Указанные направляющие могут представлять собой, в частности, скользящие рельсы. Оси шкивов 311 и 312 проходят под направляющими 351 и 352, задающими направление движения, и ориентированы параллельно этим направляющим. Шкивы 311 и 312 расположены над плечами 412 пользователя 410 устройства. Горизонтальное расстояние между балками 301 и 302, а следовательно, и между шкивами 311 и 312, таково, что голова 411 пользователя 410 может располагаться между балками 301 и 302, причем это не доставляет указанному пользователю 410 неудобств.
Направляющие 351 и 352 выполнены с возможностью скольжения вперед и назад при любом воздействии в соответствующем направлении на шкив 311 или 312. Эти шкивы 311 и 312 представляют собой колеса, установленные с возможностью поворота вокруг указанных горизонтальных осей, связанных с направляющими 351 и 352, причем оси ориентированы параллельно боковым балкам 301 и 302, соответственно. Таким образом, комплект шкивов 311 и 312 может изменить направление левого троса 401 и правого троса 402 (левый и правый - относительно пользователя) с горизонтального, параллельного траверсам 600, на идущее, по существу, вниз для соединения в точках 501 и 502 с подвесной системой 500. Тросы 401 и 402 слегка наклонены друг к другу во фронтальной плоскости пользователя 410 вследствие того, что точки 501 и 502 крепления расположены в тазовой части 520 подвесной системы 500. Кроме того, эти точки расположены спереди и сзади пользователя 410. Другими словами, тросы 401 и 402 разделяются, каждый, на два стропа, 426 и 427, прикрепляемые спереди и сзади подвесной системы 500. Для этого стропы 426 и 427 удерживаются на расстоянии распоркой 428. Тазовая часть подвесной системы 500 содержит паховые лямки 521, соединяющие переднюю и заднюю части подвесной системы 500.
В качестве направляющих 351 и 352 могут быть использованы скользящие или сдвижные рельсы или линейные опоры. В дальнейших вариантах осуществления (не показаны на чертежах) направляющие 351 и 352 могут быть изогнутыми с целью изменения силы воздействия на шкивы 311 и 312, требуемой для перемещения шкивов 311 и 312 по направляющим 351 и 352. Это предпочтительно может быть достигнуто расположением направляющих в плоскости балок 301 и 302 с изгибом по дуге окружности с центром в ближайшем шкиве 315. В этом случае при повороте направо трос, отклоняемый на направляющей 352, непосредственно следует изгибу направляющей, и длина этой части троса не изменяется, так как расстояние между шкивом 315 и изогнутой частью направляющей 352 постоянно. С другой стороны, противолежащая направляющая 351, от которой трос идет к шкиву 315 с левой стороны пользователя, изогнута в противоположную сторону и поэтому при повороте направо требует больше троса.
Возможно также расположить в плоскости балок 301 и 302 направляющие 351 и 352 с изгибом по дуге окружности с центром в шкиве 315, противолежащем направляющей, другими словами, свободные концы таких направляющих 351 и 352 сближены больше, чем их средние части. В этом случае трос с противоположной стороны не меняет длины при повороте, в то время как трос со стороны поворота требует удлинения.
Трос 401 и трос 402 перенаправляются шкивами 311, 312 в горизонтальное направление к левой стойке 101 и к правой стойке 102 для нового перенаправления следующей комбинацией шкивов 315 и 316 на участки, ориентированные параллельно стойкам 101 и 102, заканчивающиеся в системе 400 поддержки веса и прикрепленные к ней.
Такая система 400 поддержки веса, или система разгрузки веса, может быть системой любого типа, известного специалистам, например, электронной системой, раскрытой заявителем в документе ЕР 1 586 291 А1, или механической компенсационной системой, предложенной заявителем в документе ЕР 1 908 442 А1, или просто пружиной, прикрепленной к основанию 201 или к основанию 202.
Подвесная система 500 с тазовой частью 520 и, например, четырьмя точками крепления 501, 502 стропов 426 и 427, соединяющихся в левый трос 401 и правый трос 402 непосредственно под шкивами 311 и 312, обеспечивает надежное позиционирование пользователя 410 в устройстве с фронтальной плоскостью над осью 215 приводимых колес.
Как было указано, на фиг. 2 схематически показан вид сбоку устройства по фиг. 1; фронтальная плоскость 420 обозначена пунктирной линией, соединяющей крепежные части шкивов 311 и 312 и идущей вертикально к земле через ось 215 приводимых колес 211 и 212.
Передний строп 426 троса 402, а также задний строп 427 троса 402 прикреплены к передней и задней точкам 502 крепления тазовой части 520 подвесной системы 500, в то время как расстояние между стропами 426 и 427 в точках крепления поддерживается в зоне плеча 412 пользователя распоркой 428, образующей нижнюю сторону треугольника соединения стропов 426 и 427 с одиночным участком 402 троса для правой части тела, как показано на фиг.2. Понятно, что левый участок 401 троса содержит аналогичные элементы по другую сторону от головы 411 пользователя 410. Когда пользователь 410, пытаясь идти вперед, по существу, выходит из плоскости 420 над осью 215, датчики распознают это движение и, через блок управления 900, выдают управляющие сигналы приводному узлу 210, который после этого приводит в действие колеса 211 и 212 для движения устройства вперед. Аналогично - для движения назад и поворота на месте. Поскольку опорные колеса 221 и 222 установлены спереди и сзади от приводимых колес 211 и 212, предпочтительно - на переднем и заднем свободных концах оснований 201 и 202, устройство 100 может перемещаться в соответствии с движением пользователя, при этом центр тяжести пользователя всегда остается вблизи оси 215.
С этой целью, подвижное основание 200 устройства содержит левое основание 201 и правое основание 202, причем на каждом из двух оснований 201, 202 имеется по одному приводному узлу 210, причем приводные узлы 210 вместе с центрально расположенной подвесной системой 500 расположены в плоскости 420 приводных узлов 210, при этом блок управления 900 выполнен с возможностью управления приводными узлами 210 для изменения угловой ориентации подвижного основания 200 так, чтобы угол, образуемый телом пользователя с указанной плоскостью 420, равнялся нулю.
В качестве датчиков для выявления намерения движения пользователя могут, в частности, использоваться датчики направляющих 351 и 352, определяющие положения креплений шкивов 311 и 312, соответственно. Если, например, направляющие 351 и 352 отсутствуют, но шкивы 311 и 312 могут наклоняться, следуя наклону участков 401 или 402 троса к точке разветвления на стропы 426 и 427, то датчики могут определять этот наклон троса или шкивов.
При продвижении пользователя 410 вперед торс пользователя 410 опережает прежнюю фронтальную плоскость 420, и оба шкива 311 и 312 движутся вперед по направляющим 351 и 352.
При попытке пользователя 410 сделать поворот, например поворот направо, таз поворачивается так, что левая часть таза над левой ногой 421 продвигается вперед дальше, чем правая часть. Это немедленно передается подвесной системе 520, в частности потому, что паховые лямки 521 связывают положение ног с положением таза и, через стропы 426 и 427, а также через тросы 401 и 402 - с местами крепления к балкам 300. Далее шкив 311 скользит вперед по балке 301 в направляющей 351, в то время как шкив 312 движется назад в своей направляющей 352 - или вперед на меньшее расстояние. Это движение распознается датчиками и преобразуется в приводные сигналы для приводного узла 210 так, что приводимое колесо 211 движется быстрее, тогда как приводимое колесо 212 движется медленнее или даже останавливается или даже движется назад, обеспечивая поворот всего устройства 100, опционально-синхронно с продвижением пользователя 410.
Разделение троса 402 на стропы 426 и 427 позволяет свободно размахивать руками 416 и 417 при ходьбе.
На фиг. 3 схематически показаны в аксонометрии главные элементы устройства для тренировки ходьбы согласно другому варианту осуществления настоящего изобретения; причем частью устройства является ножной ортез 700. Показаны тросы 401 и 402, но пользователь, который должен поддерживаться подвесной системой, не показан, чтобы был лучше виден ножной ортез 700, закрепленный на деталях 710 рамы, крепящихся к стойкам 101 и 102. Этот ножной ортез может быть раскрыт, как показано на фиг.5 в документе WO 00/28927 А1 заявителя. В контексте настоящего изобретения важно, что левый и правый ортезы 701 и 702 содержат манжеты 711 и 712, которые могут быть смещены в направлении оси 215. Другими словами, манжеты 711 и 712 прикреплены к частям ножного ортеза для поддержки движения ноги 421 или 422 пользователя 410 в сагиттальной плоскости, но манжеты 711 и 712 свободны для смещения в поперечном направлении. Это может быть достигнуто за счет установки манжет 711 и 712 на полых втулках 716, скользящих на внутренних стержнях 715, прикрепленных к соответствующим частям ножного ортеза. Внутренние стержни 715 ориентированы параллельно оси 215 и перпендикулярно плоскости 420. Когда пользователь 410 в устройстве 100 пытается повернуть направо и для этого выставляет вперед левую ногу, поворачивая в то же время таз вправо, левая нога 421 пойдет внутрь, из-за чего три манжеты 711 на втулках 716 сдвинутся на внутренних стержнях 715 от ортеза 701 к противолежащему.
В другом варианте осуществления настоящего изобретения манжеты 711 и 712 могут быть установлены на скользящих рельсах, ориентированных параллельно оси 215.
Датчики распознают это поперечное движение одной или нескольких манжет и через блок управления 900 выдают управляющие сигналы приводному узлу 210, который после этого приводит в действие колеса 211 и 212 для движения устройства 100. В одном из вариантов осуществления настоящего изобретения могут быть использованы линейные потенциометры, установленные на втулках 716, или около них, или около указанных скользящих рельсов. Альтернативно, для распознавания бокового движения манжет в дальнейших разработках настоящего изобретения могут быть использованы линейные датчики, аналогичные линейным датчикам 801 и 802, указанным ниже, или ультразвуковые датчики расстояния.
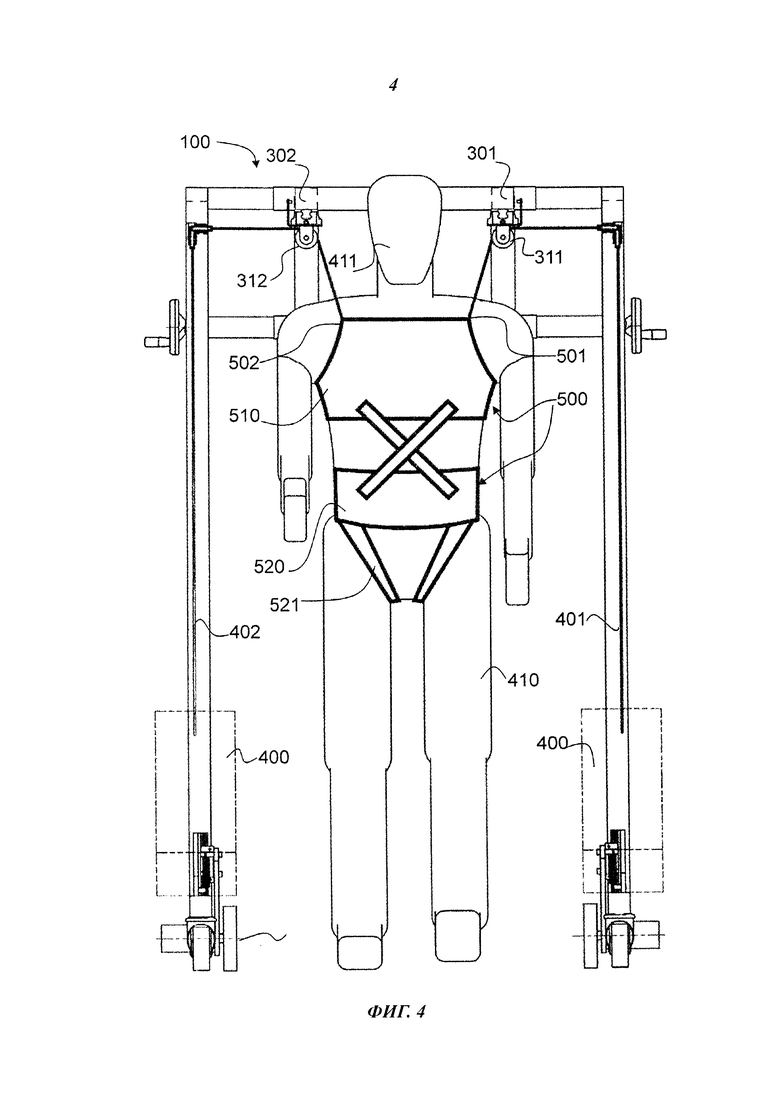
На фиг. 4 схематически показаны на виде спереди главные элементы устройства 100 для тренировки ходьбы согласно еще одному варианту осуществления настоящего изобретения; причем пользователь 410 прикреплен к устройству 100 подвесной системой 500, отличающейся от изображенной на фиг. 1. Во всем описании соблюдается сквозная нумерация подобных или одинаковых элементов подобными или одинаковыми номерами позиций. Рама устройства 100 по фиг. 4 идентична раме по фиг. 1. Подвесная система 500 в данном случае состоит из двух частей: верхней части 510 и нижней, или тазовой, части 520, причем в последней имеются паховые лямки 521. Верхняя часть 510 и тазовая часть 520 соединены через датчики натяжения 531 и 532. Последние расположены или могут располагаться в передней и задней частях подвесной системы 500. Они могут использоваться в дополнение к датчикам, связанным с направляющими 351 и 352, или вместо этих датчиков. Когда пользователь 410 движется вперед, датчики натяжения спереди от пользователя укорачиваются, а датчики натяжения сзади от пользователя удлиняются. Когда пользователь 410 поворачивает направо, датчик натяжения 531 спереди от пользователя удлиняется, а датчик натяжения 532 спереди от пользователя укорачивается. Эти обнаруженные различия могут быть преобразованы блоком управления в управляющие и приводные сигналы приводному узлу 210 и переданы на колеса 211 и 212.
На фиг. 5 схематически показаны на виде спереди главные элементы устройства 100 для тренировки ходьбы согласно еще одному варианту осуществления настоящего изобретения; причем пользователь 410 прикреплен к устройству подвесной системой 500, отличающейся от изображенной на фиг.1. Здесь имеется только верхняя часть 510, поэтому распознавание движения пользователя должно проводиться по ориентации и положению тросов 401, 402. Разумеется, можно также определять положение части 510 подвесной системы оптическими методами, т.е. получать изображения пользователя 410 в подвесной системе 510 и анализировать положение плеч 412 и/или таза.
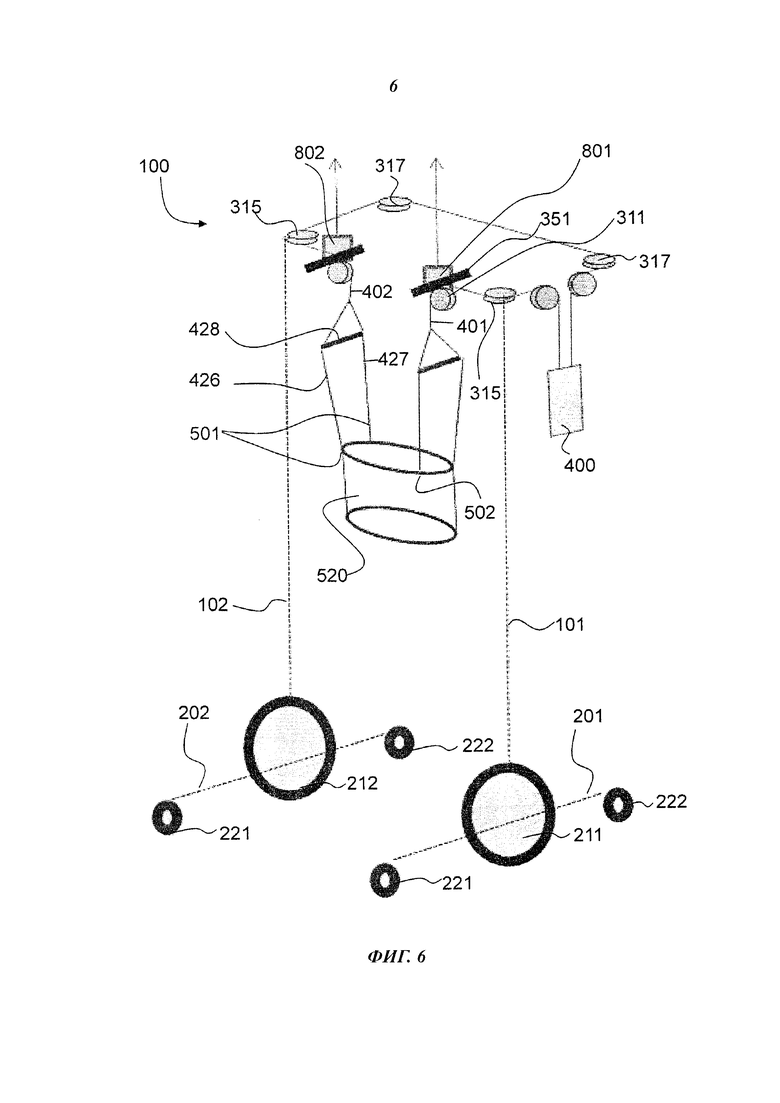
На фиг. 6 изображена схема устройства 100 для тренировки ходьбы, показывающая расположение рамы и тросов в сочетании с комбинированным механизмом 400 разгрузки веса, согласно одному из вариантов осуществления настоящего изобретения. Трос 401 меняет направление на шкиве 311, прикрепленном к направляющей 351. Линейный датчик 801 определяет положение крепления шкива 311 на направляющей 351. Может также использоваться угловой датчик, связанный со шкивом 311. Линейный датчик 802 располагается с другой стороны и определяет положение троса относительно правой части таза пользователя в тазовой части 520 подвесной системы.
Дополнительный шкив 317 перенаправляет один трос, здесь - трос 402, так, чтобы он был параллелен тросу 401 для ввода в систему 400 поддержки веса, имеющуюся только с одной стороны устройства 100.
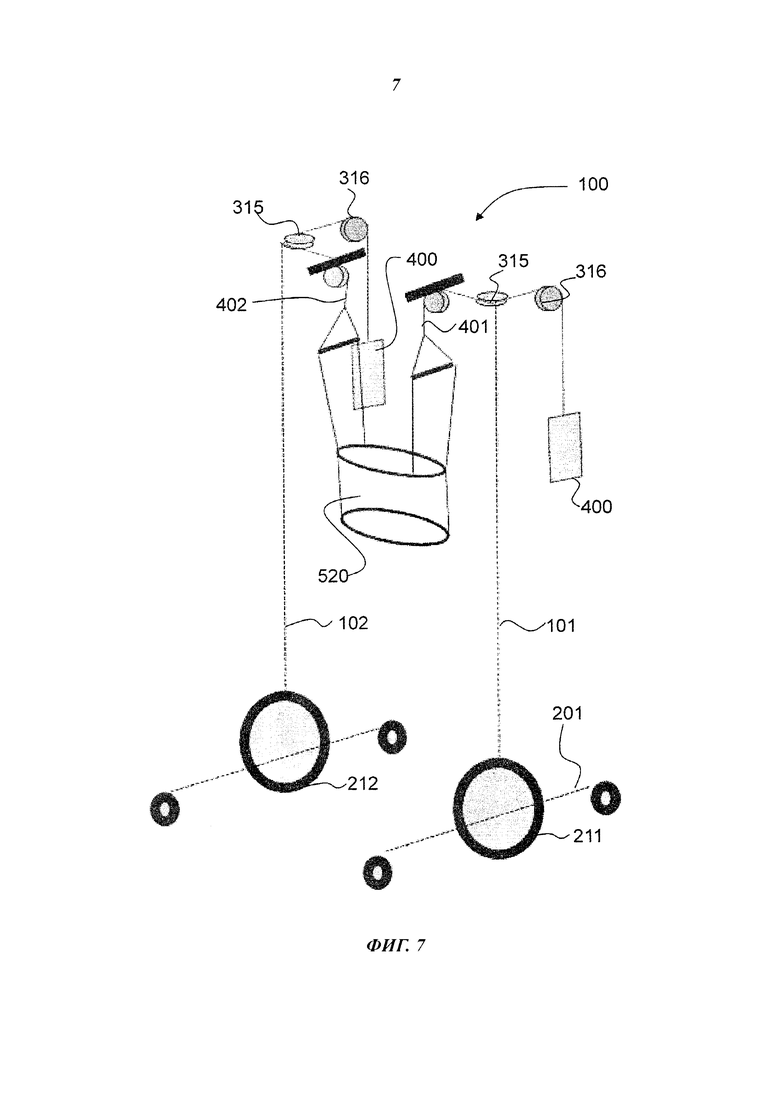
На фиг. 7 изображена схема устройства 100 для тренировки ходьбы, показывающая расположение рамы и тросов в сочетании с механизмом 400 разгрузки веса, согласно варианту осуществления, изображенному на фиг.1.
На фиг. 8 изображена схема устройства 100 для тренировки ходьбы, показывающая расположение рамы и тросов в сочетании с механизмом 400 разгрузки веса, согласно дополнительному варианту осуществления настоящего изобретения. Здесь тросы 401 и 402 заменены одиночным тросом 403, прикрепленным к поперечине 429, а далее идут стропы 426 и 427 для крепления к тазовой части 520 подвесной системы. Кроме того, пружинно нагруженные угловые датчики 811 и 812 подсоединены проводами 810 и определяют положение таза. В этом варианте одиночный трос 403, прикрепленный к центральной направляющей 353, перенаправляется к механизму 400 разгрузки веса. Понятно, что преимущество возможности определять высоту устройства 100 по голове 411 пользователя 410 в этом варианте осуществления теряется.
На фиг. 9 изображена схема устройства 100 для тренировки ходьбы, показывающая расположение рамы и тросов в сочетании с механизмом 400 разгрузки веса, согласно еще одному варианту осуществления настоящего изобретения. Здесь показаны такие части рамы: одна одиночная траверса 600 и две параллельные боковые балки 301 и 302, при этом трос 402 перенаправляется через траверсу 600, как на фиг.6, к одиночному механизму 400 разгрузки веса.
На фиг. 10 изображена схема устройства 100 для тренировки ходьбы, показывающая расположение рамы и тросов 401 и 402, в сочетании с телескопическими механизмами регулировки, согласно другому варианту осуществления настоящего изобретения. Телескопические регулировочные элементы 601 и 602 обеспечивают возможность сближения оснований 201 и 202 при наличии только одного механизма 400 разгрузки веса. Дополнительные телескопические регулировочные элементы 611 и 612 обеспечивают возможность регулировки высоты устройства 100. Эти регулировочные элементы могут быть предусмотрены не только для того, чтоб обеспечивать возможность адаптации для более высоких или более низких пользователей 410, но могут также использоваться при подъеме пользователя. В этом случае основания 201 и 202 раздвигаются как можно шире, чтобы расположить устройство за кроватью или креслом-каталкой. Регулировочные элементы 611 и 612 уменьшают высоту для крепления части 520 подвесной системы на пользователе. Затем элементы 611 и 612 удлиняются для подъема пользователя 410 из сидячего или лежачего положения в стоячее положение. Кресло-каталку или кровать откатывают, и основания 201 и 202 располагают ближе друг к другу, обеспечивая устойчивость устройства 100, которое после этого имеет возможность прохода через узкие дверные проемы.
На фиг. 11 изображена схема устройства 100 для тренировки ходьбы, показывающая расположение рамы и тросов в сочетании со встроенным ортезом 700, согласно еще одному варианту осуществления настоящего изобретения. Как было отмечено при описании фиг.3, манжеты 711 и 712 могут свободно двигаться параллельно оси 215 в направлении, указанном двойной стрелкой 720, в то время как ортез 700 направляет ноги 421 и 422 пользователя в направлении движения. Ортез 700 предпочтительно расположен, по существу, во фронтальной плоскости 420, в которой лежат две вертикальные линии 419, как показано на фиг.19. Другими словами, ноги пользователя располагаются, по существу, между приводимыми колесами 211 и 212 во фронтальной плоскости 420. В этом случае любое движение поворота пользователя будет поддерживаться регулируемыми манжетами 711 и 712 и сопровождаться последующим движением колес 211 и 212, что обеспечивает адаптацию положения фронтальной плоскости 420 к новому направлению.
На фиг. 12 схематически показан принцип распознавания движения пользователя. Положение фронтальной плоскости 420 перед движением пользователя 410 показано пунктирной линией. Пользователь 410 движется вперед и поворачивает направо. Вследствие этого фронтальная плоскость 423 таза пользователя наклоняется вправо и оказывается впереди прежнего положения фронтальной плоскости, поэтому скольжение шкива 312 назад - расстояние m2 - меньше, чем движение шкива 311 вперед - расстояние m1. Величины смещений m1 и m2 зависят от ширины w тела пользователя.
На фиг. 13 представлена схема блока управления 900 устройства согласно настоящему изобретению. Интерфейс 910 датчиков соединен с различными датчиками, как отмечалось выше. К их числу могут относиться датчики положения направляющих, или угловые датчики ориентации шкивов, или датчики натяжения, замеряющие длину. Входные сигналы 910 от датчиков обрабатываются в блоке управления в каскаде 920 обработки показаний датчиков и передаются в блок 930 распознавания намерений, где ввод, связанный с шириной w тела пользователя 410, используется для выработки управляющего сигнала, по которому в блоке 940 управления движением генерируется сигнал привода, посылаемый электродвигательному приводу 950, а последний приводит в действие элементы 210 и определяет разные скорости v1 и v2 приводимых колес 211 и 212, которые, таким образом, поворачивают устройство 100 соответственно намерениям пользователя 410 в подвесной системе 500. В варианте осуществления, содержащем ортез 700, например в варианте по фиг.3, можно обеспечить получение информации о поперечном положении манжет 711, 712 на их телескопических соединениях «стержень-втулка» или о положении направляющих, наряду с входными сигналами в интерфейс 910 датчиков.
На фиг. 14 изображена схема устройства 100 для тренировки ходьбы, показывающая расположение рамы и тросов в сочетании с механизмом 400 разгрузки веса, согласно дополнительному варианту осуществления настоящего изобретения. Здесь показаны такие части рамы: одна одиночная траверса 600 и две поперечные боковые балки 321 и 322, при этом трос 402 перенаправляется через траверсу 600, как на фиг.6, к одиночному механизму 400 разгрузки веса. В одном из вариантов осуществления шкивы 311 и 312 могут быть прикреплены к боковым поперечинам 321 и 322, которые могут прикрепляться шарнирно, чтобы свободно и независимо поворачиваться относительно системы 300 по двойной стрелке 320 так, что при движении пользователя 410 боковые поперечины 321 и 322 независимо поворачиваются вокруг обозначенной горизонтальной оси под действием сил, воздействующих на тросы 401 и 402, причем эти повороты могут быть измерены, например, угловыми датчиками, в частности потенциометрами, и поданы на вход блока управления 900.
Здесь шкивы 311 и 312, направляющие тросы к пользователю, могут быть прикреплены с возможностью поворота к свободным концам боковых поперечин 321 и 322, при этом шкивы 311 и 312 поворачиваются по двойной стрелке 320.
На фиг.15 изображена схема устройства для тренировки ходьбы, показывающая другое расположение рамы и тросов в сочетании с механизмом разгрузки веса, согласно еще одному варианту осуществления настоящего изобретения, в котором, аналогично варианту осуществления по фиг.10, используется телескопический механизм для подъема пользователя и регулировки устройства по росту пользователя. Телескопические соединения 611 и 612 предпочтительно встроены в стойки 101 и 102 и позволяют подгонять высоту крепежной части подвесной системы. Это устройство согласно фиг.15 позволяет отделить регулировку длин тросов от динамической разгрузки веса, которые в указанных традиционных устройствах обычно совмещались.
Здесь боковые балки 331 и 332 крепятся, соответственно, к стойкам 451 и 452 разгрузки веса, которые, в свою очередь, жестко прикреплены к траверсе 600. Стойки 451 и 452 разгрузки веса могут содержать пружинные приспособления, действующие по двойным стрелкам 450 и позволяющие боковым балкам 331 и 332 независимо совершать, по существу, вертикальное перемещение, предпочтительно - на расстояние до 15 см, поскольку таков максимально часто встречающийся диапазон перепада высоты торса над землей при ходьбе с полным шаговым циклом. В этом случае такие, например, простые пружинные крепления боковых балок 331 и 332 относятся к системе динамической разгрузки веса. Тросы 401 и 402 заданной длины, опционально- механически регулируемой, крепятся к направляющим 351 и 352, которые, в свою очередь, прикреплены к боковым балкам 331 и 332, соответственно.
Кроме того, траверса 600 разделена на участки, как уже было раскрыто в связи с фиг.10, что позволяет регулировать ширину устройства, т.е. определяет поперечное расстояние между балками 201 и 202 основания и, тем самым, обеспечиваемое для ходьбы свободное пространство между колесами 211 и 212.
Возможно также выполнить стойки 451 и 452 в виде фиксированных стержней и крепить к ним боковые балки 331 и 332 шарнирно с возможностью поворота вокруг горизонтальной оси, параллельной траверсе 600. В этом случае регулировка длины тросов 401 и 402, ограничивающая перемещение вверх-вниз направляющих и точек крепления тросов 401 и 402, зависит от наклона боковых балок 331 и 332.
Возможно также выполнить стойки 451 и 452 в виде фиксированных стержней и крепить к ним боковые балки 331 и 332 шарнирно с возможностью поворота вокруг вертикальных осей, параллельных стойкам 451 и 452, соответственно. В этом случае поворот боковых балок 331 и 332 может быть распознан угловыми датчиками и может указывать на движение поворота прикрепленного пользователя в подвесной системе 500. При этом боковые балки поворачиваются в горизонтальной плоскости по обе стороны от головы пользователя в устройстве. Разумеется, можно комбинировать эти конструкции с подпружиненными стойками 451 и 452 или поворотными боковым балкам 331 и 332, раскрытыми выше, при этом оба решения относятся к динамической разгрузке веса.
Регулирование длины троса, кроме прочего - для адаптации устройства к антропометрии пользователя, обеспечивается телескопической конструкцией вертикальных стоек 101 и 102. Это регулирование может быть механизировано с использованием червячного механизма, приводимого в действие приводной шестерней, или других механизмов подъема и опускания верхней траверсы над уровнем пола.
Система поддержки веса, реализованная в виде стоек 451 и 452 или поворотных боковых балок 331 и 332, допускает вертикальное перемещение части, по меньшей мере, свободных концов боковых балок 331 и 332 и воздействует на эти боковые балки 331 и 332 через элементы поддержки веса для обеспечения, по меньшей мере, частичной разгрузки пользователя. Элементы поддержки веса могут представлять собой пружины в стойках 451 и 452. В другом варианте осуществления элементы поддержки веса могут представлять собой более сложные механизмы, обеспечивающие, по существу, постоянную разгрузку в диапазоне вертикальных перемещений боковых балок 331 и 332 в направлении двойных стрелок 450, например, аналогично схеме механической компенсации, раскрытой заявителем в документе ЕР 1908442 А1.
Следует заметить, что в вариантах осуществления по фиг. 1-14 возможно также крепить тросы 401 и 402 непосредственно к боковым балкам. Далее, шкивы 311 и 312 (и последующие элементы перенаправления троса, а также устройство 400 разгрузки веса) заменены элементами подвески, как указано в связи с описанием фиг. 15.
На фиг. 16 изображена схема устройства для тренировки ходьбы, показывающая другое расположение рамы и тросов в сочетании с механизмом разгрузки веса, согласно другому варианту осуществления настоящего изобретения, в котором устройство 100 расположено над бегущей дорожкой 290. Действительно, в схеме, изображенной на фиг. 16, «верхние» элементы устройства 100 для тренировки ходьбы, помещены над бегущей дорожкой 290 как над фиксированной опорой. Так как это позволяет восстанавливать навык ходьбы не сходя с места, приводные узлы используются не для перемещения устройства, а для приведение в действие ленты бегущей дорожки, которая хоть и не изображена, но встроена в верхнюю поверхность элемента рамы основания и обозначена позицией 290.
Следует заметить, что все варианты осуществления по фиг.1-11 могут применяться как с подвижным, так и с неподвижным основанием 290, например, установленным над бегущей дорожкой.
На фиг. 17 более подробно показана балочная система вариантов осуществления по фиг. 1-5. На ней продольное положение кареток 341 и 342 на направляющих 351 и 352 определяется датчиками положения кареток 341 и 342 - для распознавания намерений пользователя в подвесной системе 500. Ускорение движения вперед передается скольжением кареток 341 и 342 к свободным концам боковых балок 301 и 302. При остановке движения пользователя может быть обнаружено скольжение в обратном направлении. Если пользователь поворачивает направо (относительно направления движения), то левая каретка 341 движется к свободному концу боковой балки 301, в то время как правая каретка 342 остается на месте или движется в обратном направлении.
На фиг. 18 изображена схема устройства для тренировки ходьбы, показывающая расположение другой рамы фиксированного размера с тросами, в сочетании с механизмом разгрузки веса, согласно дополнительному варианту осуществления настоящего изобретения. Как и в других вариантах осуществления, устройство 100 имеет раму, содержащую левую стойку 101 и правую стойку 102, соединенные друг с другом в верхней части рамы траверсой 600; которая, соединяя эти стойки 101 и 102, удерживает их на заданном расстоянии друг от друга и образует пространство для размещения между ними пользователя 410. Отличие данного варианта осуществления от других заключается в жесткой раме с фиксированной длиной стоек 101 и 102, прикрепленных к подвижному основанию 200, в данном случае - у задних опорных колес 222, и к траверсе 600 фиксированной длины. Размеры рамы предпочтительно выбираются так, чтобы она проходила сквозь стандартный дверной проем.
Другими словами, рама в этом варианте осуществления - жесткая и не содержит телескопических элементов для регулировки по высоте или ширине. Регулировка по росту пользователя и разгружающий подъем производятся с помощью линейных приводов 471 и 472, прикрепленных непосредственно или опосредованно к стойкам 101 и 102, соответственно, для перемещения вверх и вниз, соответственно, левого и правого узла 481 и 482 поддержки веса. Аналогично стойкам 451 и 452 разгрузки веса в варианте осуществления по фиг. 15, узлы 481 и 482 поддержки веса могут содержать пружинные устройства, работающие в направлениях, указанных двойными стрелками, допуская независимое и, по существу, вертикальное перемещение дополнительных траверс 620 на расстояние до 15 см, поскольку таков максимально часто встречающийся диапазон перепада высоты торса над землей при ходьбе с полным шаговым циклом. В этом случае такое, например, простое пружинное крепление дополнительной траверсы 620 относится к системе динамической разгрузки веса. Тросы 401 и 402 заданной длины, опционально - механически регулируемой, крепятся к соответственным направляющим 351 и 352, которые, в свою очередь, прикреплены к дополнительной траверсе 620.
Дополнительная траверса 620 показана состоящей из двух частей с балками на внутренних концах. Двойные стрелки 350 показывают направление компенсационного движения тросов 401 и 402 вперед и назад вдоль балки. Дополнительная траверса 620 может быть также выполнена сплошной, идущей параллельно траверсе 600. Предпочтительно, чтобы вертикально ориентированные линейные приводы 471 и 472, а также узлы 481 и 482 разгрузки веса не выступали за габариты стоек 101 и 102 и траверсы 600.
Балочная система 300 расположена напротив траверсы 600 и имеет такую длину, что когда тросы 401 и 402 находятся в среднем положении по длине балочной системы 300, они находятся в одной плоскости с вертикалью во фронтальной плоскости 419, что позволяет пользователю, идущему в устройстве, держаться, по существу, прямо, оставаясь вблизи от указанной плоскости 420.
На фиг. 19 изображена схема устройства для тренировки ходьбы, показывающая расположение еще одной рамы фиксированного размера с тросами, в сочетании с механизмом разгрузки веса, согласно дополнительному варианту осуществления настоящего изобретения, аналогичному варианту по фиг.18. Подобные или идентичные элементы обозначены подобными или одинаковыми номерами позиций. Линейные приводы 471 и 472 параллельны стойкам 101 и 102, в частности, в направлении приводимых колес 211 и 212. Различия вариантов осуществления по фиг. 18 и фиг. 19 связаны с выполнением узлов 481 и 482 разгрузки веса, которые располагаются параллельно линейным приводам, но, в то же время, вдоль вертикалей во фронтальной плоскости 419, над приводимыми колесами 211 и 212, соответственно. Функция регулировки стоек 451 и 452 по фиг.16 для подъема пользователя встроена в узлы 481 и 482 поддержки веса, которые не изменяют габариты наружной рамы 600. Другими словами, узлы поддержки веса обеспечивают частичное восприятие веса в определенном диапазоне вертикальных смещений балок 300.
Альтернативно, для регулировки по росту и подъема пользователя регулируемые стойки могут крепиться к линейным приводам и вертикально перемещаться ими или телескопическими элементами 611, 612, в то время как левая и правая стойки 101, 102 жестко связаны траверсой 600. Устройство может насчитывать три или большее количество траверс 600, так что это устройство может содержать одну траверсу, соединяющую левую и правую стойки 101, 102, две полутраверсы, соединенные, соответственно, с левой стойкой через первое телескопическое соединение 611 или с правой стойкой через второе телескопическое соединение 612, причем эти телескопические соединения выполнены для вертикального перемещения указанных полутраверс, при этом либо левая и правая регулируемые стойки 481 и 482 крепятся к одной из указанных полутраверс 620, либо левая регулируемая стойка 481, к которой прикреплена боковая балка 331 с направляющей 351, крепится к левой полутраверсе - и наоборот.
Перечень номеров позиций


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки паллеты | 2018 |
|
RU2785653C2 |
| Трубоукладочное судно (варианты) и способ укладки трубопровода (варианты) | 2012 |
|
RU2606540C2 |
| Трубоукладочное судно (варианты) и способ укладки трубопровода | 2012 |
|
RU2701981C2 |
| СИСТЕМА ВЕРТИКАЛЬНОГО И ГОРИЗОНТАЛЬНОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОЙ КАБИНЫ В ПОДЪЕМНОЙ УСТАНОВКЕ ДЛЯ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ | 2012 |
|
RU2603996C2 |
| УСТРОЙСТВО И СПОСОБ ФИЗИЧЕСКОЙ ПОДГОТОВКИ | 2006 |
|
RU2378029C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ХОДЬБЕ | 2013 |
|
RU2560511C2 |
| ТРЕНАЖЕР ДЛЯ ХОДЬБЫ | 2007 |
|
RU2409342C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ТРЕНИРОВКИ ХОДЬБЫ И СПОСОБ ТРЕНИРОВКИ ХОДЬБЫ ДЛЯ НЕГО | 2015 |
|
RU2643341C2 |
| ТРЕНАЖЕР ХОДЬБЫ ДЛЯ ТРЕНИРОВКИ НЕРВНО-МЫШЕЧНЫХ ФУНКЦИЙ | 2020 |
|
RU2807305C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ФУНКЦИЙ ХОДЬБЫ | 2024 |
|
RU2837231C1 |









Изобретение относится к области медицинской техники, а именно к устройству для тренировки ходьбы. Устройство (100) для тренировки ходьбы имеет подвижное основание (200), балочную систему (300), отходящую от подвижного основания (200), систему (400) поддержки веса, обеспечивающую возможность по меньшей мере частичного подвешивания пользователя (410) сверху в подвесной системе (500) с помощью балочной системы (300), датчик (801, 802, 531, 532) движения для распознавания движения пользователя (410) и блок (900) управления, выполненный с возможностью управления приводным узлом (210) в ответ на движение пользователя (410), распознанное датчиком (801, 802, 531, 532) движения, так, чтобы подвижное основание (200) следовало за пользователем (410) в заданном диапазоне расстояний и в заданном диапазоне углов относительно направления движения пользователя (410). Подвижное основание (200) содержит левое основание (201) и правое основание (202). На каждом из двух оснований (201, 202) имеется по одному приводному узлу (210) для перемещения подвижного основания (200). Балочная система (300) содержит две боковые балки (301, 302), доходящие до плоскости (420), проходящей через общую ось (215) приводных узлов (210), чтобы подвесная система (500) находилась в непосредственной близости от указанной плоскости (420) под боковыми балками (301, 302), причем указанная плоскость (420) ориентирована, по существу, вертикально. Изобретение отличается усовершенствованным определением изменений направления движения пользователя. 14 з.п. ф-лы, 19 ил.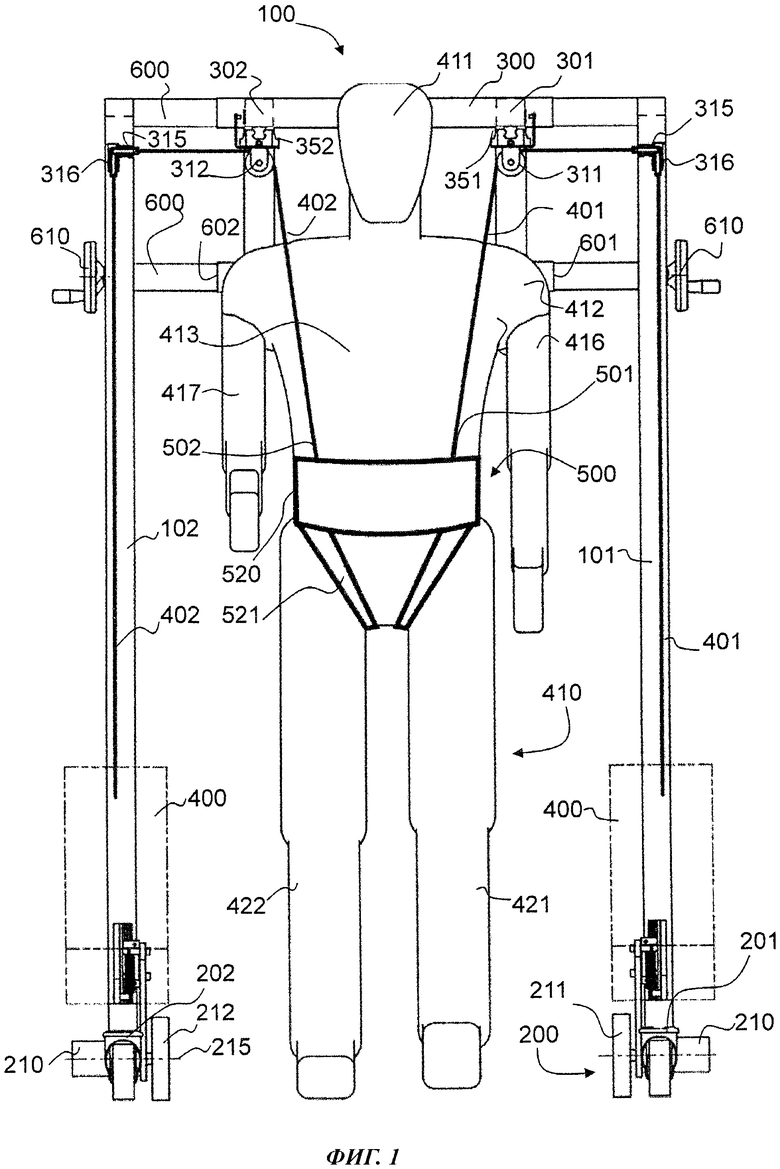
1. Устройство (100) для тренировки ходьбы, имеющее подвижное основание (200), содержащее левое основание (201) и правое основание (202), причем на каждом из указанных двух оснований (201, 202) имеется по одному приводному узлу (210) для перемещения подвижного основания (200), балочную систему (300), отходящую от подвижного основания (200), систему (400) поддержки веса, обеспечивающую возможность по меньшей мере частичного подвешивания пользователя (410) сверху в подвесной системе (500) с помощью указанной балочной системы (300), датчик (801, 802, 531, 532) движения для распознавания движения пользователя (410) и блок (900) управления, выполненный с возможностью управления указанным приводным узлом (210) в ответ на движение пользователя (410), распознанное датчиком (801, 802, 531, 532) движения, так, чтобы подвижное основание (200) следовало за пользователем (410) в заданном диапазоне расстояний и в заданном диапазоне углов относительно направления движения пользователя (410), отличающееся тем, что балочная система (300) содержит две боковые балки (301, 302), доходящие до плоскости (420), проходящей через общую ось (215) приводных узлов (210), чтобы подвесная система (500) находилась в непосредственной близости от указанной плоскости (420) под боковыми балками (301, 302), причем указанная плоскость (420) ориентирована, по существу, вертикально.
2. Устройство по п. 1, в котором предусмотрено подвешивание пользователя (410) с помощью по меньшей мере одного троса (401, 402, 403), прикрепленного к подвесной системе (500), отличающееся тем, что датчик (801, 802) движения содержит по меньшей мере один линейный или угловой датчик, определяющий положение или угол каждого троса, соединенного с подвесной системой (500).
3. Устройство по п. 1 или 2, отличающееся тем, что приводные узлы (210) вместе с центрально расположенной подвесной системой (500) расположены в плоскости (420) приводных узлов (210), при этом блок управления (900) выполнен с возможностью управления приводными узлами (210) для изменения угловой ориентации подвижного основания (200) так, чтобы угол, образуемый телом пользователя с указанной плоскостью (420), равнялся нулю.
4. Устройство по п. 1 или 2, в котором боковые балки (301, 302) расположены на такой высоте, чтобы голова (411) пользователя (410) могла находиться между ними.
5. Устройство по п. 1 или 2, в котором предусмотрены два троса (401, 402), которые расположены между шкивами (311, 312) у боковых балок (301, 302) и двумя точками (501, 502) по бокам подвесной системы (500) над плечевыми частями подвесной системы (500), причем шкивы (311, 312) выполнены с возможностью свободного перемещения в направлении боковых балок (301, 302) для распознавания движения поворота пользователя (410).
6. Устройство по п. 1 или 2, в котором предусмотрены два троса (401, 402), которые расположены между шкивами (311, 312) у боковых балок (301, 302) и двумя точками (501, 502) по бокам подвесной системы (500) над плечевыми частями подвесной системы (500), причем боковые балки (301, 302; 321, 322; 331, 332) выполнены с возможностью либо свободно шарнирно поворачиваться вокруг вертикальных осей, либо свободно вращаться вокруг горизонтальных осей, причем независимо относительно балочной системы (300), для распознавания движения поворота пользователя (410).
7. Устройство по п. 1 или 2, в котором тросы (401, 402) прикреплены к боковым балкам (331, 332) непосредственно или с помощью продольно смещаемых направляющих (351, 352), причем, по меньшей мере, указанные точки прикрепления тросов (401, 402) установлены с возможностью смещения в вертикальном направлении на заданную величину с помощью системы поддержки веса, представляющей собой пружинные вертикальные крепления боковых балок (331, 332) к траверсе (600) или шарнирные крепления боковых балок (321, 322), выполненные с возможностью поворота вокруг поперечной горизонтальной оси.
8. Устройство по п. 1 или 2, в котором тросы (401, 402) прикреплены к подвесной системе (500) в тазовой части (520) подвесной системы, причем, в частности, предусмотрены паховые лямки (521), непосредственно передающие движение поворота пользователя (410) тросам (401, 402).
9. Устройство по п. 1 или 2, в котором каждый трос (401, 402) разделен на передний и задний стропы (426, 427), которые разделены распоркой (428) над плечом (412) пользователя (410), причем передний и задний стропы (426, 427) прикреплены (501, 502) к подвесной системе (500) спереди и сзади пользователя (410).
10. Устройство по п. 1 или 2, в котором подвесная система (500) содержит верхнюю часть (510) и нижнюю часть (520), причем верхняя часть (510) соединена с нижней частью (520) с помощью по меньшей мере одного датчика (531, 532) натяжения для замера ориентации таза пользователя (410) относительно ориентации его плеч.
11. Устройство по п. 1 или 2, в котором обеспечена возможность вертикального удлинения соединения подвижного основания (200) и балочной системы (300), в частности, посредством телескопического соединения (611, 612).
12. Устройство по п. 1 или 2, в котором первое телескопическое соединение (601) предусмотрено между левым подвижным основанием (201) и левой боковой балкой (301), а второе телескопическое соединение (602) предусмотрено между правым подвижным основанием (202) и правой боковой балкой (302), чтобы расположить левое подвижное основание (201) и правое подвижное основание (202) на заданном расстоянии друг от друга.
13. Устройство по п. 1 или 2, в котором предусмотрены ортез (701) левой ноги и ортез (702) правой ноги, причем ортезы (701, 702) содержат манжеты (711, 712), выполненные с возможностью перемещения в направлении плоскости (420).
14. Устройство по п. 13, в котором манжеты (711, 712) установлены на телескопических элементах (715, 716), соединенных с приводными частями ортезов (701, 702).
15. Устройство по п. 1, в котором предусмотрено подвешивание пользователя (410) с помощью по меньшей мере одного троса (401, 402, 403), прикрепленного к подвесной системе (500), причем датчик (801, 802) движения содержит по меньшей мере один линейный или угловой датчик (812), определяющий положение или угол дополнительного троса (810), связанного с указанным линейным или угловым датчиком (812) и соединенного с подвесной системой (500), при этом указанный дополнительный трос (810) находится в натянутом состоянии для измерения указанного углового отклонения.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| СПОСОБ ВЕНТИЛЯЦИИ ЗАЩИТНОЙ ОДЕЖДЫ | 1934 |
|
SU46430A1 |
| EA 200500927 A1, 29.12.2006 | |||
| Устройство для обучения ходьбе | 1986 |
|
SU1477408A1 |
| Устройство для тренировки ходьбы | 1989 |
|
SU1734741A1 |

