Изобретение относится к устройствам для обучения ходьбе и/или для облегчения восстановления утраченных по каким-либо причинам навыков ходьбы, то есть и для реабилитации пациентов с нарушением двигательных функций.
Уровень техники представлен целым рядом устройств (RU 2396934, А61Н 1/02, опубл. 20.08.2010; RU 2422123 С2, опубл. 27.06.2011; WO 2006/17926 A1, G09B 9/00, опубл. 23.02.2006; US 2002/0065173 A1, А61Н 3/00, опубл. 30.05.2002; US 2007/0004567 A1, A47D 13/04, опубл. 04.01.2007; US 2008/0287268 A1, A61h 3/00, опубл. 20.11.2008; SU 2126666 C1, А61Н 3/00, 27.02.1999.), в том числе и роботизированных, то есть с использованием управляющих программ, реализуемых посредством компьютеров (процессоров) и соответствующих исполнительных силовых механизмов и приспособлений, взаимодействующих с пациентом.
Основными узлами известных устройств являются пространственные конструкции (каркасы, рамы, стойки, станины и т.д.), обеспечивающие регулируемую компенсацию нагрузки на ноги (опорные конечности) от собственного веса пациента, содержащие, как правило, силовые механизмы и систему подвеса пациента по типу парашютной упряжи из ремней, пряжек (застежек) и регулировочных элементов для подгонки по фигуре. Наиболее прогрессивные из известных устройств содержат также ряд датчиков, измеряющих параметры для обеспечения автоматического или полуавтоматического управления и контроля тренингом, в том числе и с помощью компьютера и соответствующих программ.
Информационные сигналы этих датчиков позволяют вести выработку управляющих команд на исполнительные звенья силовых механизмов, учет, запись и архивирование параметров каждого сеанса тренинга.
Однако у всех известных устройств есть существенный недостаток - малая адаптивность к психофизиологическим особенностям пациентов-детей со сниженной способностью к проявлению волевых качеств и не имеющих четко осознанной нацеленности на положительный (требуемый) результат тренинга.
Одним из аналогов заявляемого технического решения является устройство по патенту США [US 2008/0287268 A1, A61H 3/00, публ. 20.11.2008], имеющее сходные существенные признаки, в частности несущую направляющую, каретку с катками, выполненными с возможностью двигаться по направляющей, привод для передвижения каретки, систему подвески с возможностью оказывать поддержку человеку и систему управления, которая выполнена с возможностью обнаруживать, с помощью датчика энкодера, движение человека по отношению к каретке и активировать механизм привода от обнаруженного движения человека.
Основными недостатками аналога являются возможность осуществления поддержки только в заданной траектории движения, соответствующей конфигурации несущей направляющей.
За устройство-прототип заявляемого технического решения принято устройство по патенту США [US 2007004567, A1, A61H 3/00, опубл. 04.01.2007], содержащее максимальное количество сходных и/или тождественных заявляемому техническому решению существенных признаков с теми же свойствами (функциями) как отдельных узлов и элементов, так и устройства в целом, а именно: несущую конструкцию, выполненную в виде кран-балки с кареткой на ней и механизмом перемещения каретки, подъемный механизм с приводами для управления длиной исполнительного звена (шнура) и приводы для перемещения кран-балки, управляющий компьютер, датчики для измерения направления движения пациента по двум пространственным координатам, а также для контроля и недопущения падения пациента, поддерживаемого упряжью на его теле и выработки команд от управляющего компьютера к приводам для перемещения кран-балки и каретки, а также к приводам подъемного механизма для обеспечения подвижности поддержки пациента в упряжи в области тренировочной зоны.
Основными недостатками устройства-прототипа являются недостаточная эффективность динамической разгрузки веса, что определяется конструкцией подъемного механизма, а также то, что вертикально расположенный подвес для поддержки пациента замещает функцию удержания вертикального положение тела пациентом, тем самым отдаляя от реальных условий обучения навыку ходьбы и ограничивая развитие навыка равновесия. В дополнение к вышеотмеченному можно указать недостаточную функциональность во время сеанса (невозможность приседания, подпрыгивания, смены направления движения), что несомненно сказывается на стимуляции и мотивации пациента к реабилитационному процессу.
Требуемый технический результат предполагаемого изобретения (иначе - цель и задача его создания) заключается в расширении функциональных возможностей тренажера и повышении его потребительских свойств в целом, или, иначе, расширение функциональных возможностей при существенном повышение мотивации пациента и эффективности восстановления двигательных функций пациента.
Задача изобретения-устройства решена тем, что в тренажере для обучения ходьбе, содержащем несущую направляющую, подвижную, по направляющей, каретку с катками, с управляемым механизмом перемещения и шкивом, шнур для присоединения его свисающего со шкива конца к вертлюгу упряжи на теле пациента, механизм разгрузки веса последнего, соединенный с другим концом шнура, датчики параметров сеанса тренинга, управляющий компьютер с соответствующим программным обеспечением для анализа и оперативного управления сеансом, а также сеть передачи данных, он снабжен источником сжатого воздуха, несущая направляющая выполнена в виде замкнутой кривой, например в виде окружности, на ней размещены три как минимум, каретки, механизм разгрузки веса выполнен в виде пневмоцилиндров, по количеству кареток, рабочая полость каждого пневмоцилиндра сообщена с источником сжатого воздуха пневмолинией, поршень каждого из пневмоцилиндров соединен с другим концом соответствующего шнура, рабочие полости всех пневмоцилиндров сообщены между собой.
Дополнительными отличиями являются:
- пневмоцилиндр закреплен на каретке в радиальном, относительно направляющей, направлении;
- датчики параметров сеанса тренинга выполнены в виде энкодеров на катках и шкивах кареток;
- на пневмолинии между источником сжатого воздуха и пневмоцилиндрами установлен пневмораспределитель;
- на пневмолинии между пневмораспределитетем и рабочими полостями пневмоцилиндров установлен датчик давления;
- каждый пневмоцилиндр снабжен ресивером, полость которого сообщена с рабочей полостью пневмоцилиндра посредством отверстия в стенке последнего.
Необнаружение в общедоступных источниках информации, в том числе и в патентных, технических решений с той же (или эквивалентной) совокупностью существенных, в том числе отличительных, признаков и с теми же свойствами характеризует заявленное устройство как новое и промышленно применимое, что при несомненном достижении (обеспечении) требуемого технического результата позволяет утверждать о соответствии объекта критериям «изобретения».
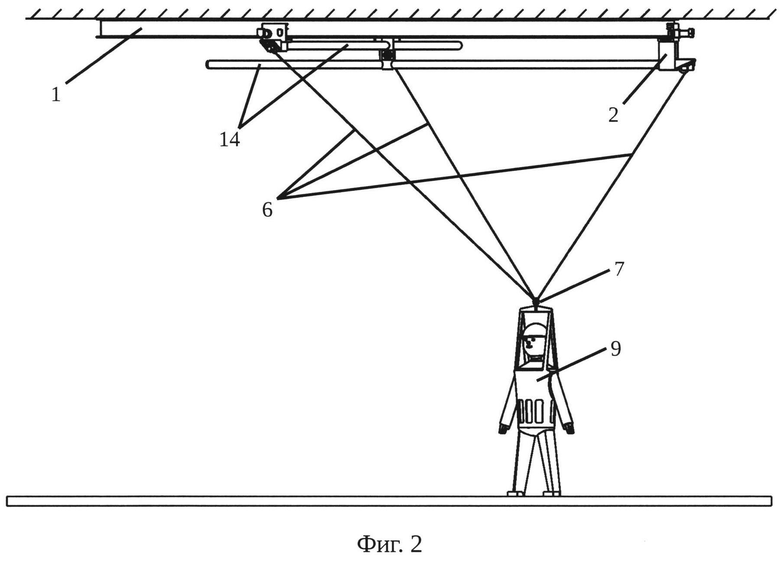
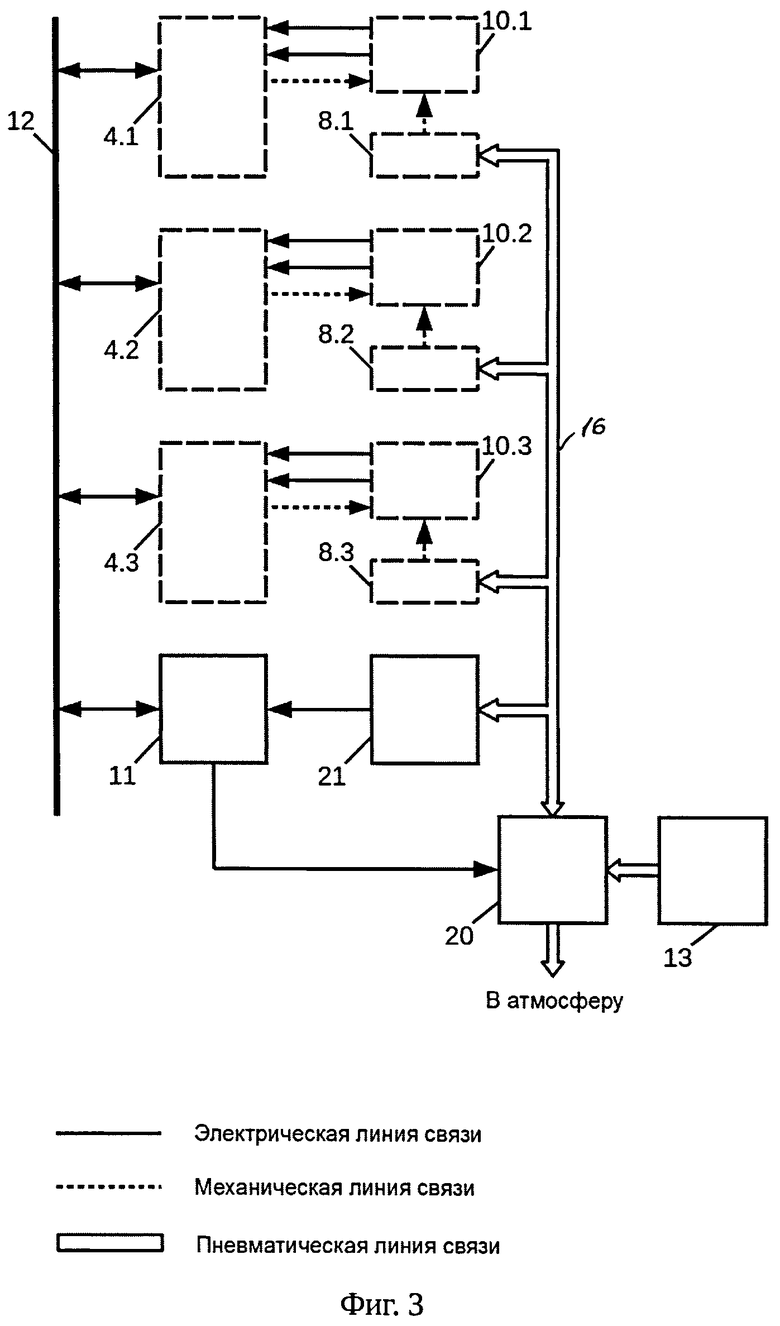
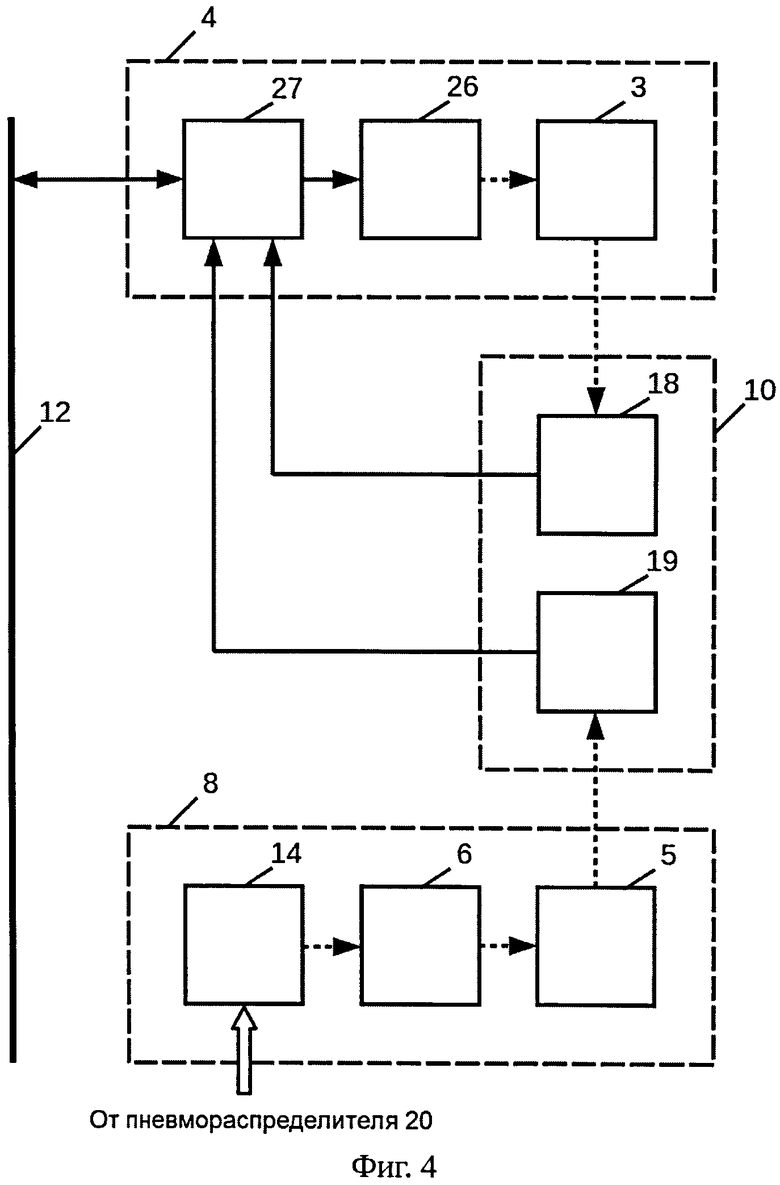
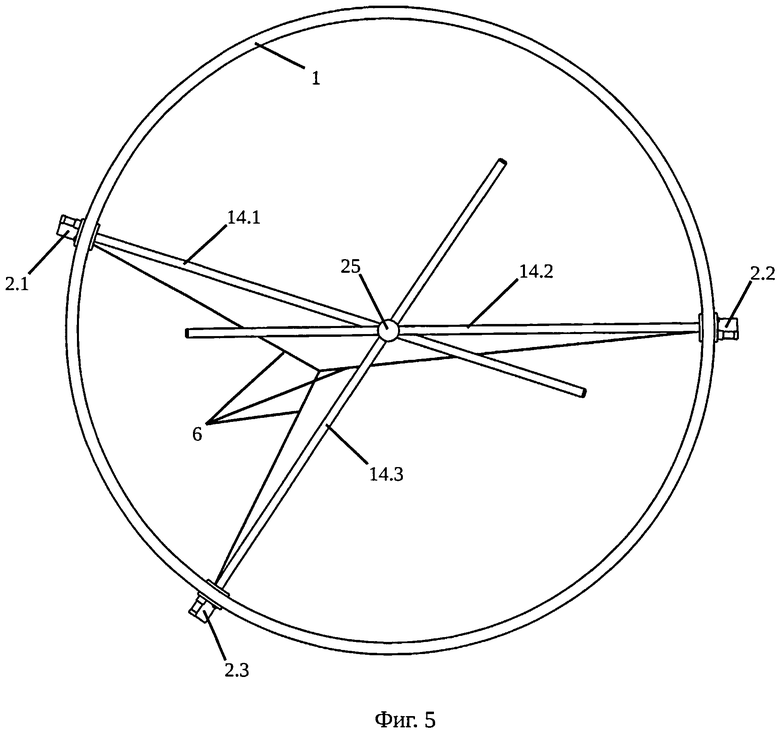
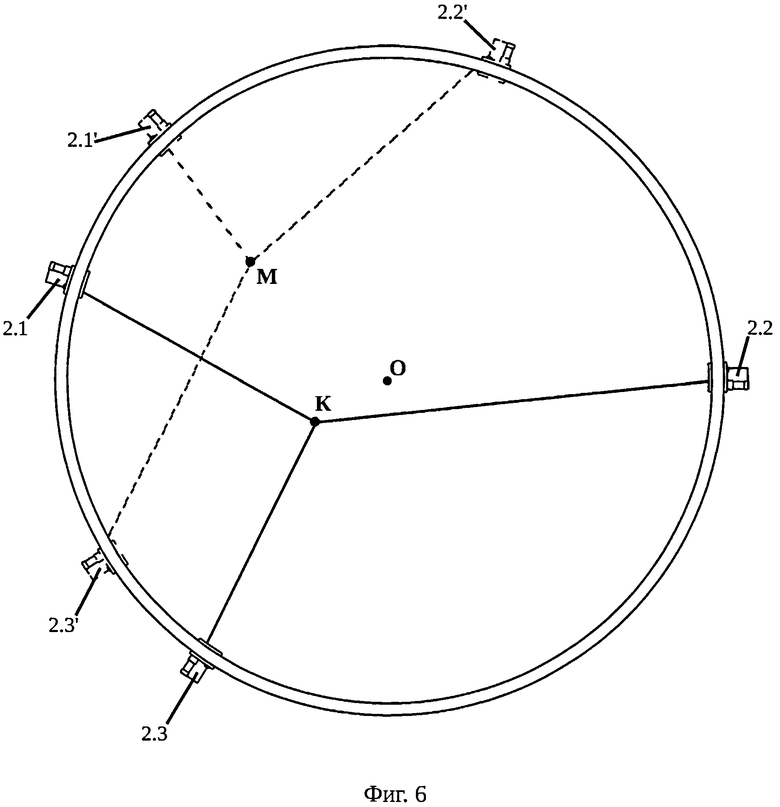
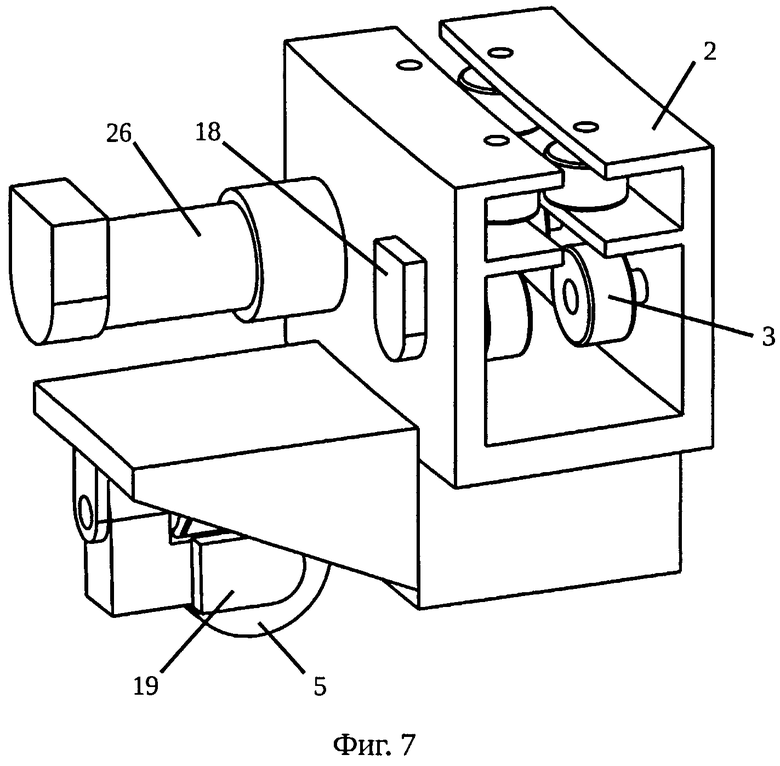
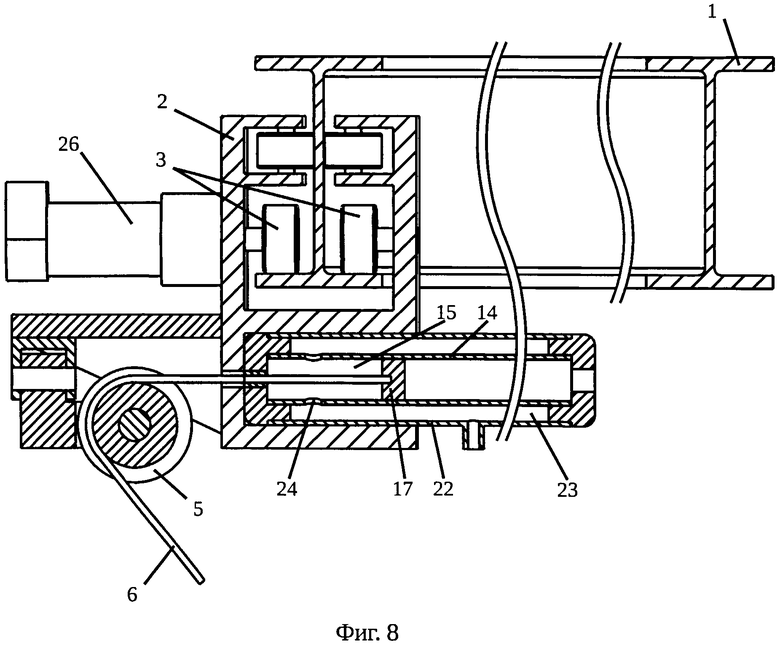
Конструктивное исполнение устройства поясняется графическими материалами, где: на фигуре 1 и 2 приведен общий вид; на фигуре 3 приведена блок-схема устройства; на фигуре 4 приведена блок-схема механизма перемещения каретки, механизма разгрузки веса тела и датчиков параметров сеанса тренинга; на фигуре 5 приведен вид тренажера сверху; на фигуре 6 приведено изменение положений кареток тренажера на направляющей при перемещении пациента из точки «К» в точку «М»; на фигуре 7 приведена каретка; на фигуре 8 приведены элементы тренажера в сборе.
Заявленный тренажер для обучения ходьбе содержит (см. фиг.1-8) несущую направляющую 1, крепящуюся, например, к потолку. На ней размещены подвижные каретки 2.1, 2.2 и 2.3 с катками 3 для опоры на направляющую, управляемыми механизмами 4 перемещения каждой из них и шкивами 5. На каждом из шкивов каждой из кареток расположен шнур 6, свисающий со шкива, конец каждого шнура предназначен для соединения, например, с карабином (не показан) вертлюга 7 упряжи 9 на теле пациента. К механизму 8 разгрузки веса пациента присоединены другие концы каждого из шнуров. Тренажер снабжен также датчиками 10 параметров сеанса тренинга, содержит управляющий компьютер 11 с соответствующим программным обеспечением для анализа и оперативного управления сеансом, сеть 12 передачи данных и источник 13 сжатого воздуха. Механизм 8 разгрузки веса пациента выполнен в виде пневмоцилиндров 14.1, 14.2 и 14.3 по количеству кареток 2, рабочая полость 15 каждого пневмоцилиндра сообщена с источником 13 сжатого воздуха пневмолинией 16, а поршень 17 каждого из пневмоцилиндров 14.1, 14.2 и 14.3 соединен с другим концом 9 соотвествующего ему шнура 6. При несущей направляющей в форме окружности (что является предпочтительным вариантом) каждый из пневмоцилиндров ориентирован в радиальном, относительно направляющей, положении, как это изображено на фиг.5. Датчики 10 параметров сеанса тренинга содержат энкодеры 18 катков 3 и энкодеры 19 шкивов 5 кареток 2. Рабочие полости 15 пневмоцилиндров 14 механизма 8 разгрузки веса пациента сообщены между собой единой пневмолинией 16 от источника 13 сжатого воздуха и на ней установлены пневмораспределитель 20 и датчик 21 давления для контроля и управления степенью разгрузки веса пациента. Каждый из пневмоцилиндров 14 снабжен ресивером 22 в виде защитного кожуха этого цилиндра, как это изображено на фигуре 8, при этом полость 23 ресивера сообщена с рабочей полостью 15 пневмоцилиндра отверстием 24 в стенке последнего. Следует отметить, что на фигуре 5 позицией 25 обозначена точка дополнительного шарнирного крепления-подвеса, пневмоцилиндров 14 к потолку, например, в случае их значительного линейного размера. На фигуре 6 изображена ситуация, когда пациент из точки «К», переместится в точку «М» и каретки 2 займут положения 2.1', 2.2' и 2.3'. Механизм 4 перемещения каждой из кареток 2 (см. фигуры 7 и 8) содержит электродвигатель 26 с контроллером 27, обеспечивающие посредством управления с компьютера (по сигналам энкодеров 18 и 19) оптимальное позиционирование каретки 2 на направляющей 1 и, соответственно, взаимное расположение кареток относительно друг друга.
Тренажер для обучения ходьбе работает следующим образом. Исходное состояние тренажера предполагает, что пациент находится практически в центре зоны тренинга, см. точку «О» на фигуре 6, каретки расположены на несущей направляющей равноудаленно друг от друга, то есть распределены по окружности через 120°. Концы шнуров, свисающие со шкивов, крепят на вертлюге упряжи пациента и медленной подачей сжатого воздуха из источника, например компрессора, в рабочие полости пневмоцилиндров, разгружают и поддерживают во время сеанса вес тела пациента на заданную величину, которая высчитывается управляющим компьютером по сигналу с датчика давления. Подача воздуха при этом регулируется управляемым пневмораспределителем и программой управляющего компьютера. Учитывая, что рабочие полости всех пневмоцилиндров сообщены между собой, давление во всех пневмоцилиндрах одинаково, и одинаковы тянущие усилия тросов независимо от перемещения пациента по зоне тренинга по горизонтали. При этом в пневмоцилиндрах, снабженных ресиверами, при изменении положения поршней, незначительно изменяется давление в системе, и соответственно степень разгрузки веса пациента. Этим достигается эффективная динамическая разгрузка веса, в широком диапазоне возможных передвижений пациента по горизонтали и вертикали. Далее пациенту предлагается (в той или иной форме) перемещаться по манежу в соответствии с методикой тренинга, при этом ребенку, например, могут быть предложены какие-либо стимулирующие (повышающие мотивацию) меры и средства игрового характера (игровой направленности). Управляющий компьютер по показаниям энкодеров 18, расположенных на шкивах, при известном положении кареток, отслеживает местоположение и передвижение пациента по зоне тренинга и управляет перемещением кареток таким образом, чтобы компенсировать горизонтальные силы, действующие на пациента. Позиционирование кареток контролируется по показанием энкодеров 19 катков. Трехточечный подвес вместе с вышеуказанными механизмом разгрузки веса и механизмом перемещения кареток приводит к компенсации горизонтальных сил, образующихся из-за того, что тросы подвеса находятся под углом к вертикали. Причем компенсация горизонтальных сил сохраняется при любых передвижениях пациента по зоне тренинга. Предлагаемый тренажер позволяет сделать процесс реабилитации динамичным и интересным, создав игровую зону достаточной площади и возможность свободного передвижения в этой площади, как по горизонтали в любом выбранном направлении, а также позволяет совершать прыжки и подъемы по элементам игровой зоны. Тренажер формирует навык удержания равновесия в вертикальном положении тела и ходьбы в условиях, максимально приближенным к реальным, обеспечивает высокую степень безопасности процесса тренировки. Тренажер не замещает полностью функцию самостоятельного удержания равновесия и требует от пациента активного участия в этом процессе, при этом степень участия находится в обратной зависимости от степени разгрузки веса пациента (чем больше разгрузка веса, тем проще удерживать равновесие).
Заявленный объект, как изобретение, обеспечивает достижение декларированного технического результата, в том числе проведение лечебного сеанса в диапазоне от полной до частичной динамической разгрузки веса пациента, обеспечивая передвижение пациента с сохранением динамической разгрузки веса по всему объему игровой зоны, в связи с чем подлежит защите соответствующим охранным документом (патентом) РФ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛЕЧЕБНОЙ ГИМНАСТИКИ И УСТРОЙСТВО ДЛЯ ЛЕЧЕБНОЙ ГИМНАСТИКИ | 2012 |
|
RU2520248C2 |
| Полуавтоматическая линия для сборки обуви | 1975 |
|
SU526347A1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ МЕХАНОТЕРАПИИ НИЖНИХ КОНЕЧНОСТЕЙ | 2023 |
|
RU2802462C1 |
| МЕХАТРОННАЯ СИСТЕМА ФОРМИРОВАНИЯ ИНДИВИДУАЛЬНОГО ИНТРАОПЕРАЦИОННОГО ПОЛОЖЕНИЯ ПАЦИЕНТА | 2022 |
|
RU2803982C1 |
| Устройство бокового смещения рамы пропашного культиватора | 2023 |
|
RU2804100C1 |
| Беговой тренажер с интерфейсом виртуальной реальности | 2023 |
|
RU2813000C1 |
| Тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы | 2019 |
|
RU2720323C1 |
| Устройство для воспроизведения всенаправленного пешего передвижения пользователя | 2023 |
|
RU2835014C2 |
| Устройство формования синтетической химической нити | 2021 |
|
RU2754504C1 |
| ПРОМЫШЛЕННАЯ СИСТЕМА НАКОПЛЕНИЯ ЭНЕРГИИ | 2018 |
|
RU2699855C1 |
Изобретение относится к области медицинской техники и предназначено для восстановления утраченных по каким-либо причинам или неразвитых навыков ходьбы, то есть для реабилитации пациентов с нарушением двигательных функций. Тренажер для обучения ходьбе содержит несущую направляющую, подвижную по направляющей каретку с катками, с управляемым механизмом перемещения и шкивом, шнур для присоединения его свисающего со шкива конца к вертлюгу упряжи на теле пациента, механизм разгрузки веса последнего, соединенный с другим концом шнура, датчики параметров сеанса тренинга, управляющий компьютер с соответствующим программным обеспечением для анализа и оперативного управления сеансом, а также сеть передачи данных. Тренажер снабжен источником сжатого воздуха. Несущая направляющая выполнена в виде замкнутой кривой, например в виде окружности, на ней размещены три как минимум каретки. Механизм разгрузки веса выполнен в виде пневмоцилиндров по количеству кареток. Рабочая полость каждого пневмоцилиндра сообщена с источником сжатого воздуха пневмолинией. Поршень каждого из пневмоцилиндров соединен с другим концом соответствующего шнура. Рабочие полости всех пневмоцилиндров сообщены между собой. Изобретение позволяет расширить функциональные возможности тренажера для обучения ходьбе, повысить мотивацию пациента и эффективность восстановления двигательных функций за счет приближения к реальным условиям навыков ходьбы и равновесия, а также навыков приседания, подпрыгивания и смены направления движения. 5 з.п. ф-лы, 8 ил.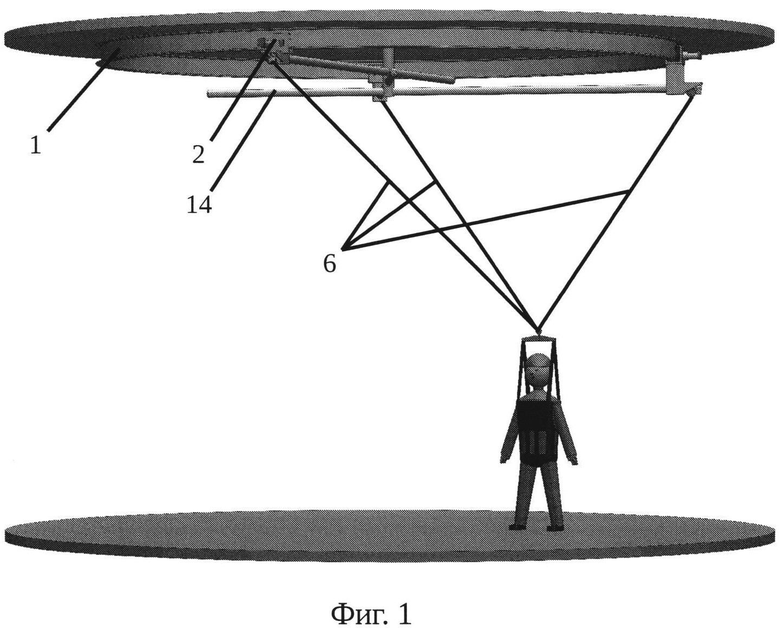
1. Тренажер для обучения ходьбе, содержащий несущую направляющую, подвижную по направляющей каретку с катками, с управляемым механизмом перемещения и шкивом, шнур для присоединения его свисающего со шкива конца к вертлюгу упряжи на теле пациента, механизм разгрузки веса последнего, соединенный с другим концом шнура, датчики параметров сеанса тренинга, управляющий компьютер с соответствующим программным обеспечением для анализа и оперативного управления сеансом, а также сеть передачи данных, отличающийся тем, что он снабжен источником сжатого воздуха, несущая направляющая выполнена в виде замкнутой кривой, например в виде окружности, на ней размещены три как минимум каретки, механизм разгрузки веса выполнен в виде пневмоцилиндров по количеству кареток, рабочая полость каждого пневмоцилиндра сообщена с источником сжатого воздуха пневмолинией, поршень каждого из пневмоцилиндров соединен с другим концом соответствующего шнура, рабочие полости всех пневмоцилиндров сообщены между собой.
2. Тренажер для обучения ходьбе по п. 1, отличающийся тем, что пневмоцилиндр закреплен на каретке в радиальном, относительно направляющей, направлении.
3. Тренажер для обучения ходьбе по п. 1, отличающийся тем, что датчики параметров сеанса тренинга выполнены в виде энкодеров на катках и шкивах кареток.
4. Тренажер для обучения ходьбе по п. 1, отличающийся тем, что на пневмолинии между источником сжатого воздуха и пневмоцилиндрами установлен пневмораспределитель.
5. Тренажер для обучения ходьбе по п. 1, отличающийся тем, что на пневмолинии между пневмораспределителем и рабочими полостями пневмоцилиндров установлен датчик давления.
6. Тренажер для обучения ходьбе по п. 1, отличающийся тем, что каждый пневмоцилиндр снабжен ресивером, полость которого сообщена с рабочей полостью пневмоцилиндра посредством отверстия в стенке последнего.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| JP 2013000573 A, 07.01.2013 | |||
| Устройство для обучения ходьбе | 1986 |
|
SU1477408A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| ЕПВ 200500927 А1, 13.05.2003 | |||
| CN 202516240 U, 07.11.2012 | |||
| EПВ 0 519 762 А1, 23.12.1992 | |||

