Настоящее изобретение относится к области реабилитационной медицины, в том числе к травматологии, ортопедии и неврологии, а более конкретно - к устройству для тренировки функций ходьбы.
Предлагаемое устройство может быть использовано для тренировки мышц, обслуживающих крупные суставы нижних конечностей с одновременной защитой структурных элементов суставов от воздействия весовой нагрузки. При этом предлагаемое устройство может быть применено для улучшения двигательных возможностей, в том числе маломобильных пользователей любого возраста, для уменьшения риска получения травмы при самостоятельном передвижении, создания психологической ситуации успеха, увеличения мотивации к самостоятельному передвижению.
Настоящее изобретение может быть использовано, в том числе в области спорта и физической культуры для улучшения подвижности в суставах стоп, голеностопных суставах, коленных и тазобедренных суставах.
Наиболее эффективно настоящее изобретение может быть использовано в медицине для реабилитации пользователей с нарушениями функций движения ног при ходьбе. В том числе, для обучения навыку ходьбы пользователей с увеличенными весом и габаритами, инвалидов, страдающими серьезными поражениями нервной системы и опорно-двигательного аппарата, то есть с нарушениями функции самостоятельного передвижения вследствие инвалидизирующих заболеваний нервной системы и опорно-двигательного аппарата (детский церебральный паралич; спинальный дизрафизм; последствия острых нарушений мозгового кровообращения, черепно-мозговых и позвоночно-спино-мозговых травм, воспалительных заболеваний головного и спинного мозга; последствия травм, воспалительных и/или дистрофических заболеваний суставов нижних конечностей; последствия травм длинных трубчатых костей нижних конечностей и тому подобное). Проблема восстановительного лечения указанных пользователей чрезвычайно актуальна ввиду социальной значимости.
Возможность поставить пользователя, утратившего навыки ходьбы, на ноги как можно раньше имеет определяющее значение для восстановления способности ходить и предупреждения проблем, возникающих в результате физической неподвижности. При нарушениях ходьбы, связанных с инсультом, травматическим повреждением спинного мозга и другими неврологическими заболеваниями, сигналы из мозга не поступают в мышцы. В случаях с нарушением ходьбы по ортопедическим причинам мышцы не способны полноценно отвечать на поступающие сигналы мозга.
В настоящее время для реабилитации пользователей с нарушениями функций движения ног при ходьбе и тренировки мышц нижних конечностей широко используются различные виды тренажеров, например, эллиптические тренажеры и степперы. Эти устройства содержат опорные элементы для размещения стоп пользователя, выполненные с возможностью совершения циклических возвратно-поступательных перемещений в горизонтальной и вертикальной плоскостях. Эти устройства позволяют тренировать мышцы бедра, голени, улучшать подвижность в тазобедренном, коленном, голеностопном суставах и суставах стоп. Однако эти устройства невозможно использовать для восстановления паттерна ходьбы, то есть при использовании этих устройств отсутствует возможность автоматически закрепить в сознании пользователя стереотип движения ног при ходьбе, соответствующий правильному движению ног при ходьбе здорового человека по ровной поверхности.
В настоящее время широко известно множество устройств для восстановления опорно-двигательных функций различных отделов костно-мышечной системы, в том числе путем коррекции патологических установок сегментов нижних конечностей с использованием опорных элементов, например, тренажеров и устройств для тренировки функций ходьбы, в том числе, с использованием беговой дорожки, эллиптического тренажера и медицинских ортезов, выполненных с возможностью крепления на ступне или ноге пользователя и обеспечивающих имитацию самостоятельного передвижения пользователя вдоль заданной траектории, имитирующей движение при ходьбе по неподвижной опорной поверхности.
Известно устройство для тренировки функций ходьбы (RU №2409342). Это устройство представляет собой тренажер, который содержит, по меньшей мере, один ортез со средствами крепления в области ступни или ноги. Тренажер установлен на неподвижной цельной опорной поверхности с возможностью перемещения вдоль заданной траектории, имитирующей естественное движение при ходьбе. Между ортезом и опорной поверхностью предусмотрены средства качения или скольжения, обеспечивающие возможность перемещения ортеза относительно неподвижной опорной поверхности. Данное устройство обеспечивает расширение тренировочных и реабилитационных возможностей спортивного тренажера, имитирующего движение во время ходьбы. Однако это устройство имеет сложное конструктивное выполнение, при котором отсутствует возможность изменять длину шага, амплитуду работы мышц и суставно-связочного аппарата нижних конечностей при выполнении шагательных движений. Кроме того, при использовании этого устройства отсутствует возможность автоматически закрепить в сознании пользователя стереотип движения ног при ходьбе, соответствующий правильному движению ног при ходьбе здорового человека по ровной поверхности (полный паттерн ходьбы).
Известно устройство (RU 2671343 С1) для тренировки и восстановления паттерна ходьбы, которое содержит штангу, посередине которой расположен механизм регулирования ее длины. Концы штанги снабжены шарнирами, каждый из которых оснащен валом с механизмом регулирования его длины, при этом на конце каждого вала жестко закреплена опорная планка с креплением для голеностопного сустава. Валы установлены в одной плоскости перпендикулярно штанге с возможностью вращения вокруг своих осей совместно с шарнирами. Данное устройство обеспечивает регулирование длины шага, увеличение амплитуды мышечного сокращения тренируемых мышц и увеличение амплитуды движений в суставах нижних конечностях при выполнении шагательных движений. Однако при использовании этого устройства отсутствует возможность автоматически закрепить в сознании пользователя правильный стереотип движения ног при ходьбе по ровной поверхности.
Известно устройство для тренировки функций ходьбы: (ИНТЕРНЕТ: LokoHelp, Woodway «Роботизированный комплекс для локомоторной терапии и реабилитации нижних конечностей LokoHelp», (https://integro.site/tovar/lokomat-pro-pediatric/), представляющее собой электромеханическое устройство для тренировки функций ходьбы. Устройство LokoHelp содержит тренажер для ходьбы, сервопривод с зубчатой передачей и блок управления с сенсорным экраном. Для использования данного устройства тренажер устанавливают на беговую дорожку, содержащую одно цельное опорное полотно, и снимают тренажер с этой беговой дорожки по завершении использования. Устройство LokoHelp можно использовать почти с любым тредмилом (беговой дорожкой), даже со спортивными вариантами беговых дорожек. Устройство направляет стопы и позволяет пользователю активировать и корректировать положение колена и бедра, обеспечивает симметричный и ритмичный характер ходьбы во время сеанса терапии, включающий множество циклов чередующихся этапов положений и перемещений в противофазе. Однако при использовании данного устройства отсутствует возможность изменять длину шага, амплитуду работы мышц и суставно-связочного аппарата нижних конечностей при выполнении шагательных движений. При этом для использования устройства LokoHelp необходимо наличие отдельной беговой дорожки и обеспечения сложной настройки и специальной наладки устройства LokoHelp на этой беговой дорожке. Это усложняет конструктивное выполнение устройства, которое требует применения сложных манипуляций для обеспечения возможности его использования. При этом отсутствует возможность автоматически закрепить в сознании пользователя стереотип движения ног при ходьбе, соответствующий правильному движению ног при ходьбе здорового человека по ровной поверхности (полный паттерн ходьбы).
Известно устройство для тренировки функций ходьбы: (ИНТЕРНЕТ: LokomatPro (Lokomat Adult) «Роботизированный комплекс для локомоторной терапии с расширенной обратной связью», производитель: Носота (Швейцария) (https://beka.ru/katalog/mekhano-i-robotizirovannaya-terapiya/vosstanovlenie-navykov-khodby/lokomat-pro/). Этот комплекс предназначен для восстановления навыков и тренировки функций ходьбы неврологических пациентов после инсульта, травмы спинного мозга, повреждения головного мозга, либо ортопедических больных после эндопротезирования тазобедренного, коленного суставов, травмы передней крестообразной связки, в результате которых пациент утратил навыки ходьбы. Реабилитационный комплекс Lokomat содержит беговую дорожку, имеющую одно цельное опорное полотно, представляющее собой подвижную опорную поверхность, на которой пользователя поддерживают в положении стоя при помощи подвесной системы. На ногах пользователя закрепляют средства для фиксации стоп или ног пользователя, каждое из которых имеет приспособление для регулирования плотности фиксации. Данное средство подсоединяют к роботу, создают роботизированные ортезы, с помощью которых осуществляют перемещение пользователя и оценку соотношения доли участия пользователя в ходьбе за счет собственных усилий и доли участия в ходьбе тренажера, с помощью которого приближают стереотип движений пользователя в соответствующих суставах к физиологически правильному стереотипу движений. Кроме того, комплекс содержит роботизированные двигатели, управляемые от ЭВМ. Данные двигатели с помощью лент крепят к ногам пользователя. Роботизированные ортезы ведут ноги пациента по опорной поверхности беговой дорожки в положении, приближенном к естественной ходьбе. В результате реабилитационный комплекс Lokomat способствует укреплению мышц и восстановлению кровоснабжения нижних конечностей у пациентов, утративших способность ходить. При этом значительно укрепляется костная ткань, что снижает риск потери костной массы и, как следствие, риск перелома костей. Однако данный тренажерный комплекс обладает сложным конструктивным выполнением роботизированных ортезов, выполненных с возможностью крепления на ступне или ноге пользователя и обеспечивающих имитацию самостоятельного передвижения пользователя вдоль заданной траектории, имитирующей движение при ходьбе по неподвижной опорной поверхности. Это требует использования сложных манипуляций для обеспечения возможности точного воспроизведения правильного стереотипа движений ног пользователя при ходьбе. Кроме того, при использовании этого устройства отсутствует возможность автоматически закрепить в сознании пользователя стереотип движения ног при ходьбе, соответствующий правильному движению ног при ходьбе здорового человека по ровной поверхности (полный паттерн ходьбы).
Известно устройство для тренировки функций ходьбы: (ИНТЕРНЕТ: Векарус «Реабилитационный роботизированный тренажер с биологической обратной связью для тренировки ходьбы и равновесия LEXO» Производитель: Tyromotion (Австрия) (https://beka.ru/katalog/mekhano-i-robotizirovannaya-terapiya/vosstanovlenie-navykov-khodby/lexo/). Данный тренажер содержит устройство для тренировки функции ходьбы и равновесия, содержащее основание, на котором закреплены боковые стенки, между которыми установлены два размещенных рядом опорных элемента для ходьбы, каждый из которых представляет собой сборное опорное полотно, имеющее верхнюю и нижнюю поверхности. Каждое сборное опорное полотно в поперечном направлении выполнено составным из трех отдельных частей: передней, средней и задней, которые скреплены с возможностью изменения положения одна относительно другой и осуществления множества перемещений одна относительно другой в вертикальной и горизонтальной плоскостях. Средняя часть каждого сборного опорного полотна представляет собой площадку (зону) для размещения стопы пользователя. На каждой площадке закреплено средство для фиксации соответствующей стопы или ноги пользователя, имеющее приспособление для регулирования плотности фиксации. При этом устройство содержит конструктивно сложный привод (или несколько приводов), выполненный с возможностью взаимодействия с нижней поверхностью каждой отдельной части соответствующего опорного полотна и обеспечения отдельным частям опорных полотен множества циклов чередующихся этапов возвратно-поступательных и наклонных перемещений в противофазе.
Под словосочетанием «наклонное перемещение» мы понимаем перемещение под углом наклона к горизонтальной плоскости (academic.ru: Словари и энциклопедии на Академике: Словарь-справочник терминов нормативно-технической документации: 3.1.17 подъемная платформа с наклонным перемещением: Подъемная платформа, у которой грузонесущее устройство перемещается по жестким направляющим под углом наклона к горизонтали не более 75°).
При осуществлении одного цикла чередующихся этапов привод выполнен с возможностью обеспечения всем частям каждого сборного опорного полотна чередования следующих этапов перемещений в противофазе: первый этап - с возможностью перемещения передней и средней частей соответствующего сборного опорного полотна от крайнего переднего положения передней части назад с нулевым углом наклона к горизонтальной плоскости и одновременного наклонного перемещения задней части соответствующего сборного опорного полотна вверх с увеличением угла наклона к горизонтальной плоскости; второй этап - с возможностью наклонного перемещения средней и задней частей соответствующего сборного опорного полотна одновременно назад и вверх с увеличением угла наклона к горизонтальной плоскости до размещения задней части соответствующего сборного опорного полотна в крайнем заднем положении с максимальным углом наклона к горизонтальной плоскости (наивысшего подъема); третий этап - с возможностью при достижении задней частью крайнего заднего положения изменения направления перемещения соответствующего полотна на противоположное наклонное направление вперед и вниз с уменьшением угла наклона к горизонтальной плоскости; четвертый этап - с возможностью наклонного перемещения соответствующего полотна в направлении вперед и вниз с уменьшением угла наклона к горизонтальной плоскости до достижения передней и средней частями соответствующего полотна положения с нулевым углом наклона к горизонтальной плоскости, достижения передней частью крайнего переднего положения и размещения задней части соответствующего сборного опорного полотна под углом к горизонтальной плоскости. При этом каждая отдельная часть соответствующего полотна выполнена с возможностью изменения положения одна относительно другой и осуществления множества дополнительных перемещений одна относительно другой в вертикальной и горизонтальной плоскостях. В результате этого привод содержит множество отдельных приспособлений для взаимодействия с нижними поверхностями каждой отдельной части соответствующего сборного опорного полотна. Эти приспособления выполнены с возможностью придания каждой из указанных частей соответствующего полотна требуемых синхронных положений и перемещений в противофазе. Оборудование данного тренажера настраивают под физическое состояние конкретного пользователя, что стимулирует активность пользователя, повышает эффективность его реабилитации, обеспечивает свободное движение его суставов. При этом происходит тренировка правильной осанки, равновесия, способности переноса веса с одной ноги на другую.
Однако наличие указанного множества отдельных приспособлений привода для обеспечения соответствующим составным частям соответствующих сборных опорных полотен множества циклов указанных чередующихся этапов возвратно-поступательных и наклонных перемещений в противофазе и дополнительных перемещений одна относительно другой приводит к тому, что привод данного устройства обладает сложным конструктивным выполнением. Это приводит к трудностям точного воспроизведения множества циклов указанных чередующихся этапов перемещений составных частей соответствующих сборных опорных полотен в целом.
Кроме того, так как перемещение вверх соответствующего сборного опорного полотна на втором этапе осуществляют при его наклонном перемещении назад, это сопровождается принудительным подъемом вверх соответствующей стопы и пятки пользователя. Это противоречит правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть исключает осуществление полного паттерна ходьбы. В связи с этим при движении сборных опорных полотен с осуществлением указанного множества циклов чередующихся этапов перемещений в противофазе, в том числе, с чередованием указанных первого, второго, третьего и четвертого этапов отсутствует возможность автоматически закрепить в сознании пользователя стереотип движения ног при ходьбе, соответствующий правильному движению ног при ходьбе здорового человека по ровной поверхности (полный паттерн ходьбы).
В основу изобретения поставлена задача создать устройство для тренировки функций ходьбы с такими конструктивными особенностями опорных элементов и привода, которые позволили бы упростить их конструктивное выполнение, обеспечить точное воспроизведение множества циклов чередующихся этапов возвратно-поступательных и наклонных перемещений опорных элементов и обеспечить возможность автоматического закрепления в сознании пользователя правильного стереотипа движения ног при ходьбе, соответствующего правильному движению ног при ходьбе здорового человека по ровной поверхности (обеспечить полный паттерн ходьбы).
Эта задача решена созданием устройства для тренировки функций ходьбы, содержащего основание, на котором закреплены боковые стенки, между которыми размещены два расположенных рядом опорных элемента, каждый из которых имеет верхнюю поверхность, содержащую площадку для размещения стопы пользователя, и нижнюю поверхность, выполненную с возможностью взаимодействия с приводом, имеющим двигатель и приспособленным для обеспечения опорным элементам множества циклов чередующихся этапов возвратно-поступательных и наклонных перемещений в противофазе, при этом, согласно изобретению, каждый опорный элемент представляет собой удлиненную целостную полосу, имеющую переднее и заднее окончания, а между боковыми стенками под передними окончаниями удлиненных целостных полос с возможностью вращения размещено средство для поддержания передних окончаний удлиненных целостных полос в заданном положении относительно горизонтальной плоскости, при этом привод выполнен с возможностью взаимодействия с нижними поверхностями задних окончаний удлиненных целостных полос и обеспечения каждой удлиненной целостной полосе при осуществлении одного цикла возвратно-поступательных и наклонных перемещений в противофазе следующих чередующихся этапов: на первом этапе привод выполнен с возможностью обеспечения соответствующей полосе перемещения назад от крайнего переднего положения до крайнего заднего положения и осуществления этого перемещения с нулевым углом наклона заднего окончания полосы к горизонтальной плоскости; на втором этапе привод выполнен с возможностью обеспечения соответствующей полосе изменения направления перемещения при достижении задним окончанием полосы крайнего заднего положения; на третьем этапе привод выполнен с возможностью обеспечения соответствующей полосе одновременного начала наклонных перемещений в направлениях вверх, вперед и вниз при изменении направления перемещения; на четвертом этапе привод выполнен с возможностью обеспечения соответствующей полосе осуществления начатых на третьем этапе наклонных перемещений с изменением угла наклона к горизонтальной плоскости до достижения передним окончанием полосы крайнего переднего положения.
Технический результат предлагаемого изобретения заключается в том, что конструктивное выполнение опорных удлиненных целостных полос и привода исключает необходимость использования множества отдельных приспособлений для взаимодействия с нижними поверхностями каждой отдельной части каждой опорной полосы. Это упрощает конструктивное выполнение опорных полос и привода и обеспечивает точное воспроизведение множества циклов указанных чередующихся этапов возвратно-поступательных и наклонных перемещений опорных удлиненных целостных полос в противофазе, исключает принудительный подъем стопы и пятки пользователя при движении соответствующей удлиненной полосы назад от момента размещения переднего окончания полосы в крайнем переднем положении до момента достижения задним окончанием полосы крайнего заднего положения и обеспечивает возможность автоматического закрепления в сознании пользователя правильного стереотипа движения ног при ходьбе, что способствует реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы. Это соответствует правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы.
При этом предлагаемое устройство представляет собой стационарный биомеханический степпер, то есть автоматизированный шагоход, который позволяет тренировать мышцы всего тела при снижении нагрузки на суставы.
Целесообразно, чтобы каждая удлиненная целостная полоса представляла собой цельный и прямолинейный элемент, полностью или частично выполненный из высокопрочных титанового сплава ВТ6 или алюминиевого сплава Д16Т, или чтобы каждая удлиненная целостная полоса была выполнена из жестко соединенных продольных частей, полностью или частично выполненных из указанных высокопрочных титанового или алюминиевого сплавов.
Указанное конструктивное выполнение и высокопрочные материалы удлиненных целостных полос обеспечивают легкость, твердость, жесткость и прочность этим полосам, что позволяет упростить конструктивное выполнение привода и обеспечить точное воспроизведение множества циклов чередующихся этапов положений и перемещений опорных удлиненных целостных полос в противофазе без применения множества дополнительных приспособлений, исключить принудительный подъем стопы и пятки пользователя при движении соответствующей удлиненной полосы назад от момента размещения переднего окончания полосы в крайнем переднем положении до момента достижения задним окончанием полосы крайнего заднего положения и обеспечить возможность автоматического закрепления в сознании пользователя правильного стереотипа движения ног при ходьбе, что способствует реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы. Это соответствует правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы.
Конструктивно обосновано, чтобы привод был размещен по существу под задними окончаниями удлиненных целостных полос. Это упрощает конструктивное выполнение привода, что обеспечивает точное воспроизведение множества циклов указанных чередующихся этапов возвратно-поступательных и наклонных перемещений опорных удлиненных целостных полос в противофазе, что обеспечивает все описанные выше преимущества.
Для улучшения воспроизведения правильного стереотипа ходьбы конкретных пользователей, у которых в здоровом состоянии была походка с поднятием носка в заключительной стадии шага, предпочтительно, чтобы на четвертом этапе привод был выполнен с возможностью обеспечения переднему окончанию соответствующей удлиненной целостной полосы перед достижением крайнего переднего положения первого этапа дополнительного перемещения в направлении вверх.
Это способствует реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории и правильного движения ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы пользователя, имеющего конкретные особенности походки.
Для предотвращения смещения стопы пользователя от выбранного положения на соответствующей полосе при осуществлении указанного множества циклов указанных чередующихся этапов полезно, чтобы на каждой площадке для размещения стопы было закреплено средство для фиксации стопы пользователя, имеющее приспособление для регулирования плотности фиксации.
Это соответствует правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы.
Возможно, чтобы вдоль длинных сторон удлиненных целостных полос было размещено средство для опоры рук пользователя.
Это обеспечивает поддержание равновесия пользователя при осуществлении указанного множества циклов указанных чередующихся этапов, что способствует реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории и правильного движения ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы пользователя, имеющего конкретные особенности походки.
Удобно, чтобы над удлиненными целостными полосами было закреплено средство для поддержания тела пользователя.
Это обеспечивает придание и поддержание вертикального положения пользователю, страховки от падения и уменьшения весовой нагрузки на суставы нижних конечностей пользователя. Это обеспечивает возможность упрощения конструктивного выполнения опорных полос и привода и облегчает точное воспроизведение множества циклов чередующихся этапов перемещений опорных удлиненных целостных полос в противофазе что обеспечивает возможность автоматического закрепления в сознании пользователя правильного стереотипа движения ног при ходьбе, что способствует реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы. Это соответствует правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы.
Предпочтительно, чтобы средство для поддержания передних окончаний удлиненных целостных полос в заданном положении относительно горизонтальной плоскости было приспособлено для взаимодействия с нижними поверхностями передних окончаний удлиненных целостных полос и содержало переднюю ось, имеющую первое и второе противоположные окончания, с помощью которых эта ось была установлена с возможностью вращения в отверстиях, выполненных в передних участках соответствующих боковых стенок, при этом взаимодействие нижней поверхности переднего окончания каждой удлиненной целостной полосы с передней осью выполнено с помощью подшипников качения, закрепленных вблизи соответствующих первого и второго противоположных окончаний и в центральной части передней оси.
Это исключает необходимость наличия в конструкции привода множества отдельных приспособлений для взаимодействия с нижними поверхностями отдельных частей каждой отдельной опорной полосы, позволяет упростить конструктивное выполнение опорных полос и привода, а также обеспечить точное воспроизведение множества циклов чередующихся этапов возвратно-поступательных и наклонных перемещений полос в противофазе, что способствует закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы. Это соответствует правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы.
Целесообразно, чтобы привод, имеющий двигатель и выполненный с возможностью обеспечения соответствующим удлиненным целостным полосам множества циклов указанных чередующихся этапов перемещений в противофазе, содержал две поперечно соосные задние боковые оси, каждая из которых имеет первое окончание, установленное с возможностью вращения в отверстии, выполненном в заднем участке соответствующей боковой стенки, и второе окончание, консольно размещенное под соответствующей удлиненной целостной полосой с возможностью взаимодействия с нижней поверхностью последней с помощью подшипников качения, заднюю среднюю ось, поперечно соосно установленную между задними боковыми осями с возможностью вращения и имеющую первое и второе окончания, размещенные под соответствующими удлиненными целостными полосами с возможностью взаимодействия с нижними поверхностями последних с помощью подшипников качения, две задние периферийные оси, установленные равноудаленно и параллельно с разных сторон между задними средней и соответствующей задней боковой осями, причем каждая задняя периферийная ось размещена под соответствующей удлиненной целостной полосой с возможностью кругового перемещения вокруг продольной оси (а - а) задних средней и боковых осей и имеет соответствующие первое и второе окончания, выполненные с возможностью взаимодействия с нижними поверхностями соответствующих удлиненных целостных полос с помощью подшипников качения, при этом на втором окончании каждой задней боковой оси и первом и втором окончаниях задней средней оси жестко закреплены первые концы соответствующих задних кронштейнов, вторые концы которых жестко скреплены с соответствующими первыми и вторыми окончаниями соответствующих задних периферийных осей, а на нижних поверхностях соответствующих удлиненных целостных полос закреплены водила, имеющие пазы, в которых размещены средние участки соответствующих задних периферийных осей, выполненных с возможностью передачи соответствующих движений водилам, которые выполнены с возможностью передачи соответствующих перемещений удлиненным целостным полосам и обеспечения указанных чередующихся этапов при осуществлении одного цикла перемещений в противофазе.
Такое конструктивное выполнение и расположение привода исключает необходимость наличия множества отдельных приспособлений для взаимодействия с нижними поверхностями отдельных частей каждой отдельной опорной полосы, позволяет упростить конструктивное выполнение опорных полос и привода, обеспечить точное воспроизведение множества циклов чередующихся этапов возвратно-поступательных и наклонных перемещений опорных удлиненных целостных полос, исключить принудительный подъем стопы и пятки пользователя при движении соответствующего удлиненного элемента назад от момента размещения переднего окончания полосы в крайнем переднем положении до момента достижения задним окончанием полосы крайнего заднего положения и обеспечить возможность автоматического закрепления в сознании пользователя правильного стереотипа движения ног при ходьбе, что способствует реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы. Это соответствует правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы.
Для обеспечения возможности использования предлагаемого устройства пользователями с разной длиной шага удобно, чтобы каждый задний кронштейн имел длину от 10 до 30 см. Это соответствует средней длине шага детей и взрослых пользователей и дает возможность конструктивно заменять задние кронштейны под длину шага каждого конкретного пользователя. Это соответствует правильному движению ног при ходьбе здоровых пользователей с разной длиной шага по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы разных пользователей.
Для обеспечения точного воспроизведения указанного множества циклов чередующихся этапов перемещений опорных удлиненных целостных полос, соответствующих правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть соответствующих осуществлению полного паттерна ходьбы, и обеспечения возможности автоматического закрепления в сознании пользователя правильного стереотипа движения ног при ходьбе, способствующего реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы, полезно, чтобы нижняя поверхность каждой отдельной удлиненной целостной полосы была выполнена плоской, при этом целесообразно, чтобы передняя ось, две задние боковые оси и задняя средняя ось были установлены на одном уровне, а также, предпочтительно, чтобы в отверстиях, выполненных в передних и задних частях боковых стенок и в пазах водила были установлены подшипники качения, при этом целесообразно, чтобы на концах соответствующих задних кронштейнов, жестко скрепленных с соответствующими задними периферийными осями, были размещены подшипники качения.
Для предотвращения опускания площадки для размещения стопы пользователя ниже горизонтальной плоскости, в которой лежат переднее и заднее окончания удлиненных целостных полос, конструктивно обосновано, чтобы эта площадка была расположена на верхней поверхности каждой удлиненной целостной полосы между местами расположения передней оси и задних боковых осей привода при любых возможных перемещениях указанных полос.
Желательно, чтобы средство для поддержания передних окончаний удлиненных целостных полос в заданном положении относительно горизонтальной плоскости было приспособлено для взаимодействия с нижними поверхностями передних окончаний удлиненных целостных полос и выполнено составным из нескольких частей, содержащих две поперечно соосные передние боковые оси, каждая из которых имеет первое окончание, размещенное с возможностью вращения в отверстии, выполненном в переднем участке соответствующей боковой стенки, и второе окончание, размещенное под соответствующей удлиненной целостной полосой с возможностью взаимодействия с нижней поверхностью последней с помощью подшипников качения, переднюю центральную ось, поперечно соосно установленную между передними боковыми осям с возможностью вращения и имеющую первое и второе окончания, размещенные под соответствующими удлиненными целостными полосами с возможностью взаимодействия с нижними поверхностями последних с помощью подшипников качения, две передние периферийные оси, установленные равноудаленно и параллельно с разных сторон между передней центральной и соответствующей передней боковой осями, размещенные под соответствующими удлиненными целостными полосами с возможностью кругового перемещения вокруг продольной оси (б - б) передней центральной и передних боковых осей и имеет соответствующие первое и второе окончания, выполненные с возможностью взаимодействия с нижними поверхностями соответствующих удлиненных целостных полос с помощью подшипников качения, при этом на втором окончании каждой передней боковой оси и первом и втором окончаниях передней центральной оси жестко закреплены первые концы соответствующих передних кронштейнов, вторые концы которых жестко скреплены с соответствующими первыми и вторыми окончаниями соответствующих передних периферийных осей, приспособленных для обеспечения перемещения переднему окончанию каждой удлиненной целостной полосы в направлении вверх перед достижением крайнего переднего положения с помощью средства, подсоединенного к двигателю привода для передачи синхронного вращения от задней средней оси к передней центральной оси.
Это дает возможность использовать один тот же привод для придания соответствующего движения элементам привода, размещенным по существу под задними окончаниями удлиненных целостных полос, и элементам средства для поддержания передних окончаний удлиненных целостных полос в заданном положении относительно горизонтальной плоскости. Это обеспечивает точное воспроизведение множества указанных циклов чередующихся этапов перемещений опорных удлиненных целостных полос, соответствующих правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть соответствующих осуществлению полного паттерна ходьбы, в том числе для улучшения воспроизведения правильного стереотипа ходьбы конкретных пользователей, у которых в здоровом состоянии была походка с поднятием носка на заключительной стадии шага. Кроме того, это обеспечивает автоматическое закрепление в сознании пользователя стереотипа движения ног при ходьбе, способствующего реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы, а также у конкретных пользователей, у которых в здоровом состоянии была походка с поднятием носка на заключительной стадии шага.
Целесообразно, чтобы каждый передний кронштейн имел длину от 4 до 10 см. Это соответствует средней высоте подъема мыска стопы различных пользователей (детей и взрослых) и дает возможность конструктивно заменять передние кронштейны под особенности походки каждого конкретного пользователя. Это соответствует правильному движению ног при ходьбе здоровых пользователей по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы разных пользователей.
Конструктивно обосновано, чтобы двигатель привода представлял собой электродвигатель, подсоединенный к одной из задних боковых осей.
Это упрощает конструктивное выполнение привода, что позволяет обеспечить точное воспроизведение указанного множества циклов чередующихся этапов перемещений опорных удлиненных целостных полос и обеспечить возможность автоматического закрепления в сознании пользователя стереотипа движения ног при ходьбе, что способствует реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы. Это соответствует правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы.
Для обеспечения идентичности при воспроизведении множества указанных циклов чередующихся этапов положений и перемещений опорных удлиненных целостных полос, соответствующих правильному движению ног при ходьбе здорового человека по ровной поверхности, и для обеспечения идентичности при воспроизведении правильного стереотипа ходьбы конкретных пользователей, у которых в здоровом состоянии была походка с поднятием носка на заключительной стадии шага, то есть для обеспечения осуществления полного паттерна ходьбы возможно, чтобы средство для передачи синхронного вращения от задней средней оси к передней центральной оси содержало переднюю и заднюю звездочки, жестко закрепленные на соответствующих центральных участках передней центральной оси и задней средней оси и соединенные посредством цепи между собой, а также подсоединенные к двигателю привода. При этом необходимо, чтобы передняя и задняя звездочки имели одинаковое количество зубьев.
Таким образом использование предлагаемого устройства исключает необходимость наличия множества отдельных приспособлений для взаимодействия с нижними поверхностями каждой отдельной опорной полосы, что позволяет упростить конструктивное выполнение опорных удлиненных целостных полос и привода, обеспечить точное воспроизведение множества циклов чередующихся этапов перемещений опорных удлиненных целостных полос, исключить принудительный подъем стопы и пятки пользователя при движении соответствующей удлиненной полосы назад от момента размещения переднего окончания полосы в крайнем переднем положении до момента достижения задним окончанием полосы крайнего заднего положения и обеспечить возможность автоматического закрепления в сознании пользователя правильного стереотипа движения ног при ходьбе, что способствует реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы. Это соответствует правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы.
Для лучшего понимания изобретения ниже приведены конкретные примеры его выполнения со ссылками на прилагаемые чертежи, на которых:
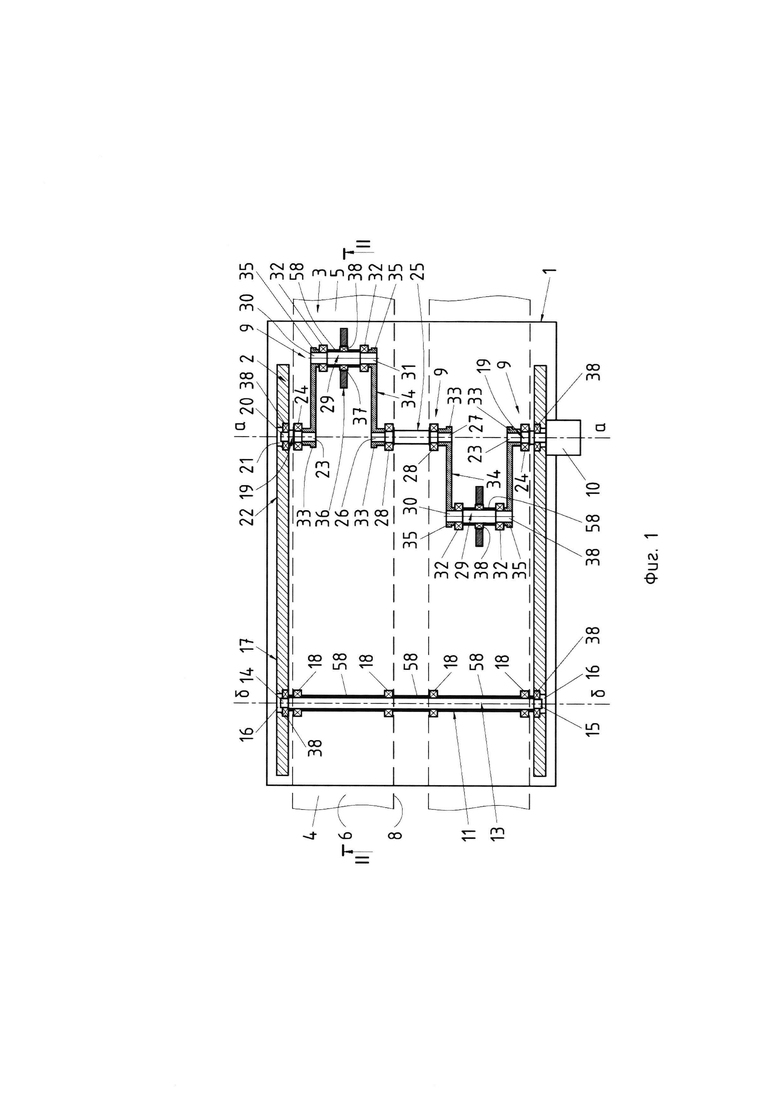
фиг. 1 - схематично изображает устройство для тренировки функций ходьбы, выполненное согласно изобретению, первый вариант выполнения, вид сверху в разрезе;
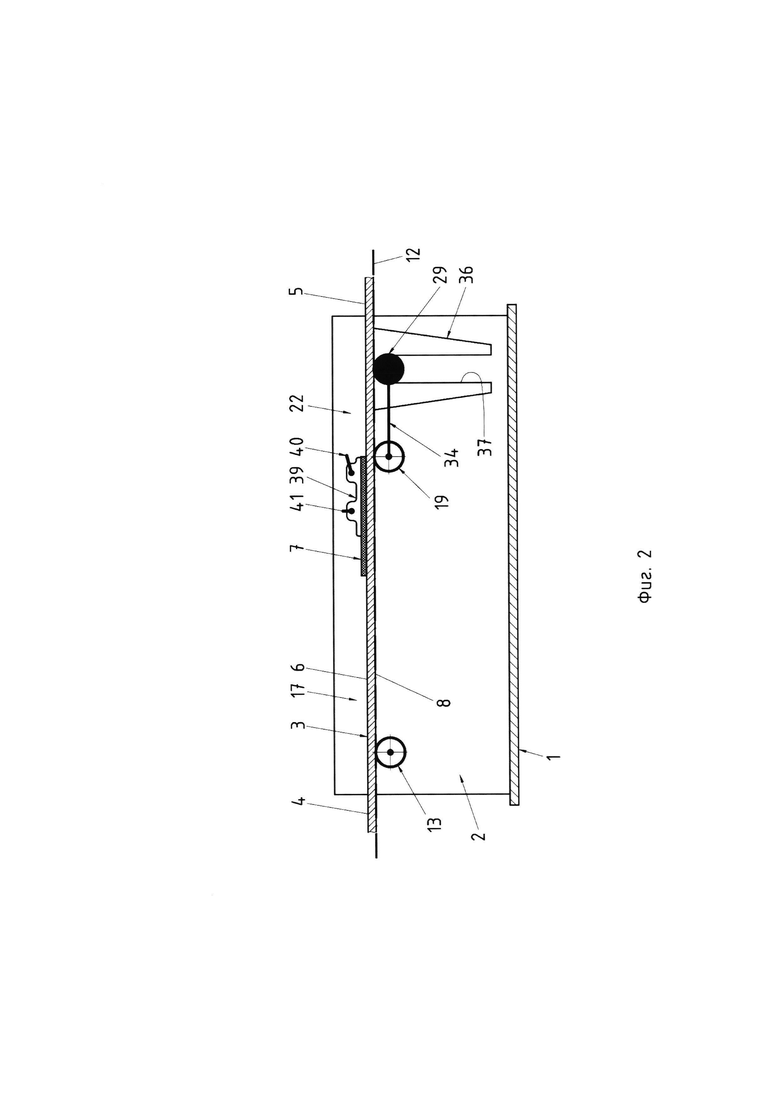
фиг. 2 - схематично изображает II-II на фиг. 1;
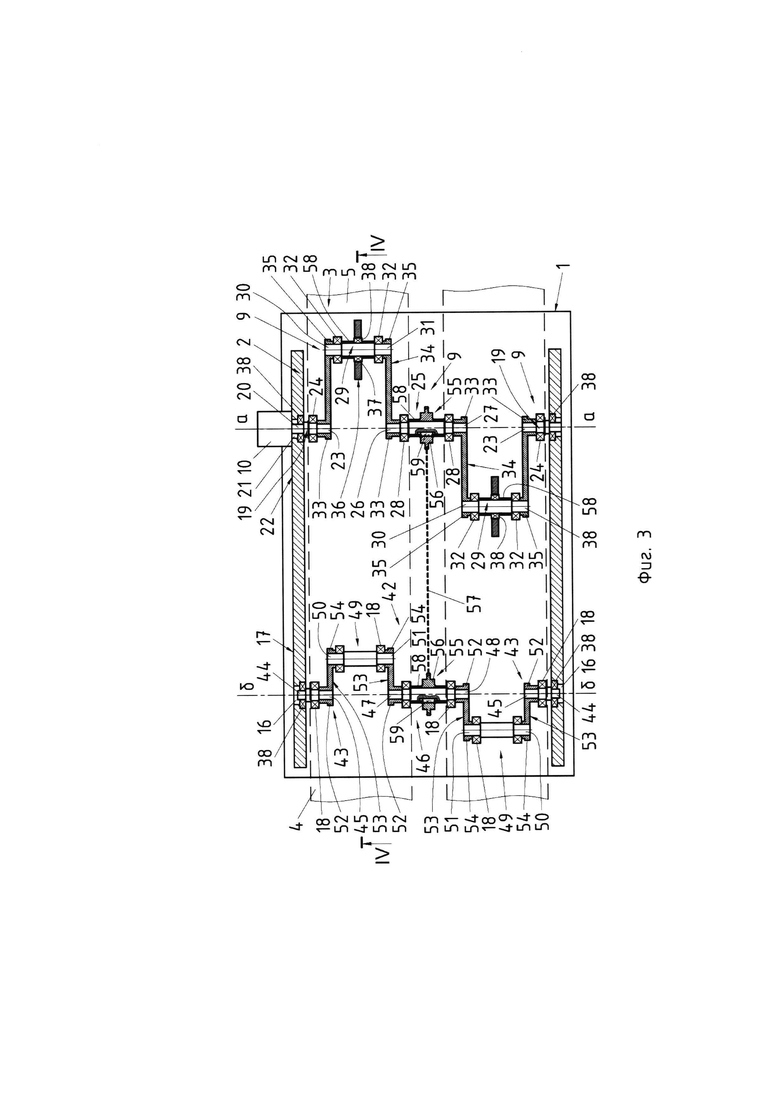
фиг. 3 - схематично изображает устройство для тренировки функций ходьбы, выполненное согласно изобретению, второй вариант выполнения, вид сверху в разрезе,
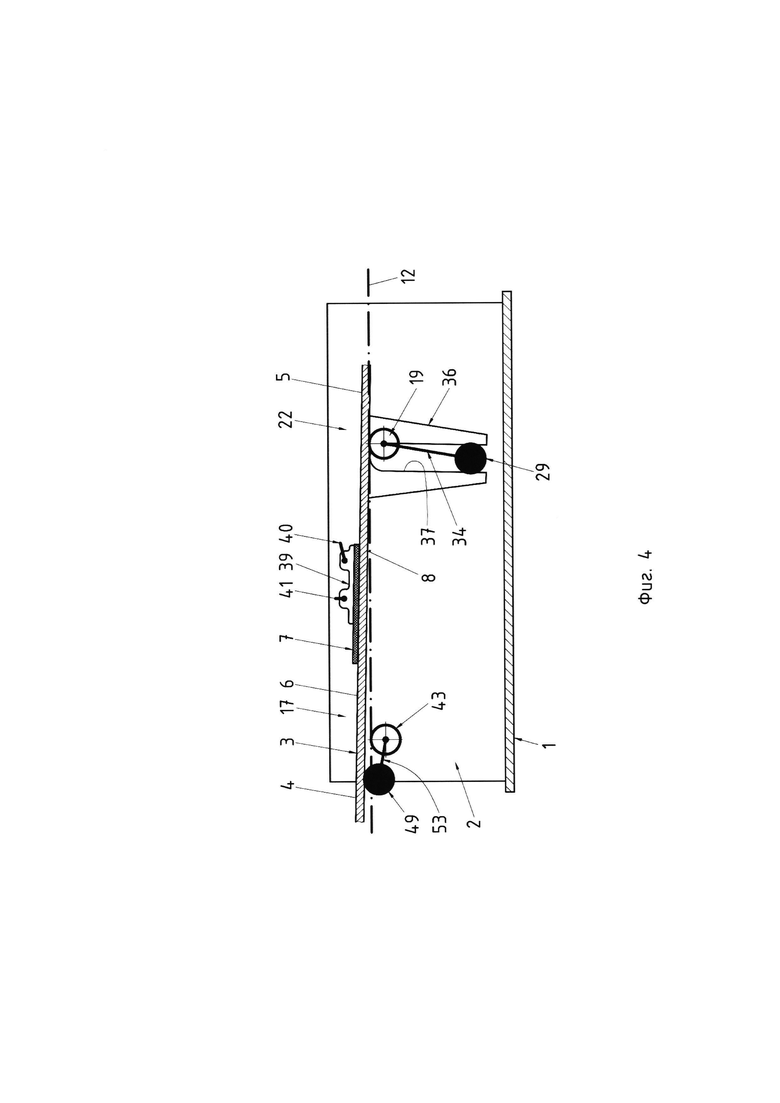
фиг. 4 - схематично изображает IV-IV на фиг. 3;
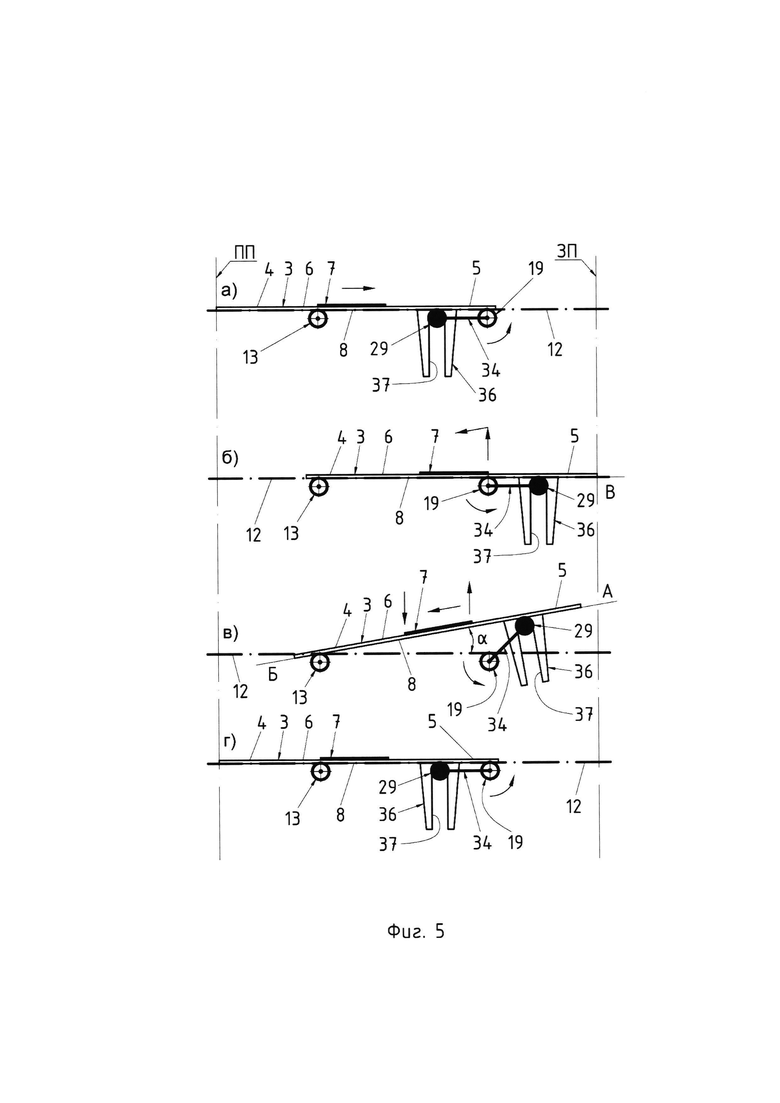
фиг. 5 а), б), в), г) - схематично изображают последовательность чередующихся этапов одного цикла для одной полосы, согласно изобретению; в первом варианте конструктивного выполнения предлагаемого устройства;
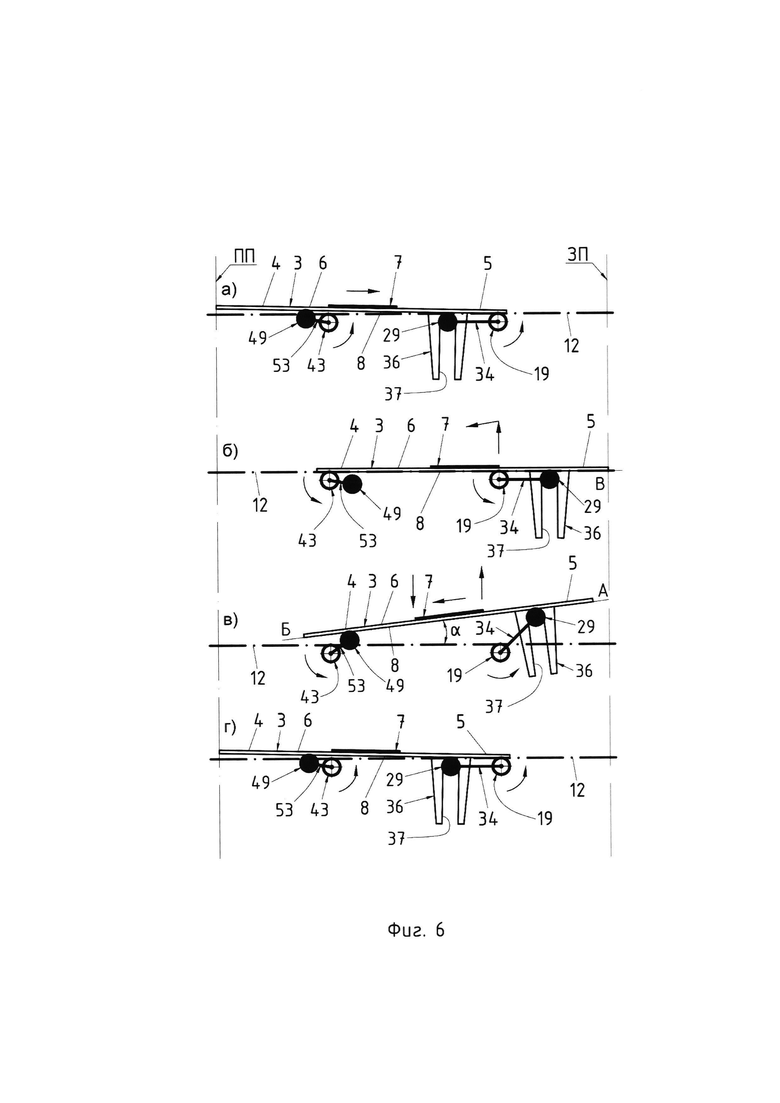
фиг. 6 а), б), в), г) - схематично изображают последовательность чередующихся этапов одного цикла для одной полосы, согласно изобретению; во втором варианте конструктивного выполнения предлагаемого устройства.
Устройство для тренировки функций ходьбы содержит основание 1 (фиг. 1-4), на котором закреплены боковые стенки 2, между которыми размещены две расположенные рядом опорные удлиненные целостные полосы 3.
Под термином «целостный» мы понимаем: представляющий собой внутреннее единство, воспринимающийся как единое целое (ИНТЕРНЕТ: kartaslov.ru>значение слова «целостный»), то есть неделимый, нераздельный, неразделимый, неразъемный.
Каждая удлиненная целостная полоса 3 имеет переднее окончание 4 и заднее окончание 5, единую верхнюю поверхность 6, содержащую площадку (зону) 7 (фиг.2, 4) для размещения стопы пользователя и единую нижнюю поверхность 8, выполненную с возможностью взаимодействия с приводом 9. Привод 9 выполнен в виде кривошипа, имеет двигатель 10 и приспособлен для обеспечения первой и второй опорным удлиненным целостным полосам 3 множества циклов чередующихся этапов возвратно-поступательных и наклонных перемещений в противофазе.
Каждая удлиненная целостная полоса 3 представляет собой цельный и прямолинейный элемент, полностью или частично выполненный из высокопрочных титанового сплава, например, ВТ6 или алюминиевого сплава, например, Д16Т, а может быть выполнена, например, из жестко соединенных продольных частей с образованием прямолинейного элемента, полностью или частично выполненного, например, из высокопрочных титанового или алюминиевого сплавов.
При этом единая нижняя поверхность 8 каждой отдельной удлиненной целостной полосы 3 выполнена плоской.
Конструктивное выполнение опорных удлиненных целостных полос 3 исключает необходимость использования множества отдельных приспособлений для взаимодействия с нижними поверхностями 8 каждой опорной полосы 3. Это упрощает конструктивное выполнение опорных полос 3 и обеспечивает точное воспроизведение множества циклов указанных чередующихся этапов возвратно-поступательных и наклонных перемещений опорных удлиненных целостных полос 3 в противофазе, исключает принудительный подъем стопы и пятки пользователя при движении соответствующей удлиненной полосы 3 назад от момента размещения переднего окончания 4 полосы 3 в крайнем переднем положении до момента достижения задним окончанием 5 полосы 3 крайнего заднего положения и обеспечивает возможность автоматического закрепления в сознании пользователя правильного стереотипа движения ног при ходьбе, что способствует реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы. Это соответствует правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы.
При этом предлагаемое устройство представляет собой стационарный биомеханический степпер, то есть автоматизированный шагоход, который позволяет тренировать мышцы всего тела при снижении нагрузки на суставы.
Кроме того, указанное конструктивное выполнение и материалы удлиненных целостных полос 3 обеспечивают легкость, твердость, жесткость и прочность этим полосам 3, что позволяет упростить конструктивное выполнение привода 9 (более подробный конструктивный вариант выполнения которого будет описан ниже) и обеспечить точное воспроизведение множества циклов указанных чередующихся этапов возвратно-поступательных и наклонных перемещений опорных удлиненных целостных полос 3 в противофазе.
Между боковыми стенками 2 под передними окончаниями 4 удлиненных целостных полос 3 с возможностью вращения размещено средство 11 для размещения передних окончаний удлиненных целостных полос 3 в заданном положении относительно горизонтальной плоскости 12, приспособленное для взаимодействия с нижними поверхностями 8 передних окончаний 4 удлиненных целостных полос 3.
При этом привод 9 выполнен с возможностью взаимодействия с нижними поверхностями 8 задних окончаний 5 удлиненных целостных полос 3 с возможностью обеспечения каждой удлиненной целостной полосе 3 при осуществлении одного цикла возвратно-поступательных и наклонных перемещений в противофазе следующих чередующихся этапов: на первом этапе привод 9 выполнен с возможностью обеспечения соответствующей полосе 3 перемещения назад от крайнего переднего положения (ПП) до крайнего заднего положения (ЗП) и осуществления этого перемещения с нулевым углом α наклона заднего окончания 5 полосы 3 к горизонтальной плоскости 12; на втором этапе привод 9 выполнен с возможностью обеспечения соответствующей полосе 3 изменения направления перемещения при достижении задним окончанием 5 полосы 3 крайнего заднего положения первого этапа; на третьем этапе привод 9 выполнен с возможностью обеспечения соответствующей полосе 3 одновременного начала перемещений в направлениях вверх, вперед и вниз при изменении направления перемещения на втором этапе; на четвертом этапе привод 9 выполнен с возможностью обеспечения соответствующей полосе 3 осуществления начатых на третьем этапе перемещений с изменением угла α наклона к горизонтальной плоскости 12 до достижения передним окончанием 4 полосы 3 крайнего переднего положения первого этапа.
Под словосочетанием «наклонное перемещение» мы понимаем перемещение под углом α наклона к горизонтальной плоскости 12.
Такое конструктивное выполнение привода 9 и наличие средства 11 исключает необходимость наличия в конструкции привода 9 множества отдельных приспособлений для взаимодействия с нижними поверхностями 8 отдельных частей каждой отдельной опорной полосы (ввиду отсутствия последних), позволяет упростить конструктивное выполнение опорных полос и привода, а также обеспечить точное воспроизведение множества циклов чередующихся этапов возвратно-поступательных и наклонных перемещений полос в противофазе, что способствует закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы. Это соответствует правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы.
Указанные первый, второй, третий и четвертый этапы перемещений каждой полосы 3 при осуществлении одного цикла возвратно-поступательных и наклонных перемещений в первом и втором вариантах выполнения предлагаемого устройства проиллюстрированы на схемах, изображенных на фиг. 5 - а), б), в), г) и на фиг. 6 - а), б), в), г).
На фиг. 5 а) изображен первый этап перемещений каждой полосы 3 при осуществлении одного цикла перемещений, в первом варианте выполнения предлагаемого устройства.
На фиг. 5 б) изображен второй этап перемещений каждой полосы 3 при осуществлении одного цикла перемещений, в первом варианте выполнения предлагаемого устройства.
На фиг. 5 в) изображен третий этап перемещений каждой полосы 3 при осуществлении одного цикла перемещений, в первом варианте выполнения предлагаемого устройства.
На фиг. 5 г) изображен четвертый этап перемещений каждой полосы 3 при осуществлении одного цикла перемещений, в первом варианте выполнения предлагаемого устройства.
На фиг. 6 а) изображен первый этап перемещений каждой полосы 3 при осуществлении одного цикла перемещений, во втором варианте выполнения предлагаемого устройства.
На фиг. 6 б) изображен второй этап перемещений каждой полосы 3 при осуществлении одного цикла перемещений, во втором варианте выполнения предлагаемого устройства.
На фиг. 6 в) изображен третий этап перемещений каждой полосы 3 при осуществлении одного цикла перемещений, во втором варианте выполнения предлагаемого устройства.
На фиг. 6 г) изображен четвертый этап перемещений каждой полосы 3 при осуществлении одного цикла перемещений, во втором варианте выполнения предлагаемого устройства.
Выполнение указанных чередующихся этапов удлиненными целостными полосами 3 при осуществлении одного цикла возвратно-поступательных и наклонных перемещений в противофазе и конструктивное выполнение удлиненных целостных полос 3 и привода 9 исключает принудительный подъем стопы и пятки пользователя при движении соответствующей удлиненной целостной полосы 3 назад от момента размещения переднего окончания 4 полосы 3 в крайнем переднем положении до момента достижения задним окончанием 5 полосы 3 крайнего заднего положения (ЗП), что соответствует правильному движению ног при ходьбе здорового человека. Это обеспечивает возможность автоматического закрепления в сознании пользователя правильного стереотипа движения ног при ходьбе, что способствует реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы. Это соответствует правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы.
Под углом α наклона к горизонтальной плоскости 12 мы понимаем угол α между прямой линией А (фиг. 5) (проходящей от точки подъема крайнего заднего положения задней окончания 5 соответствующей полосы 3 до точки размещения крайнего переднего положения переднего окончания 4 этой полосы 3), и прямой линией Б, (проходящей по нижней поверхности 8 удлиненной целостной полосы 3, лежащей в горизонтальной плоскости 12, принадлежащей нулевому углу α наклона соответствующей полосы 3 к горизонтальной плоскости 12 нулевого уровня).
При этом под нулевым углом α наклона к горизонтальной плоскости 12 мы понимаем угол α между прямой линией В, проходящей по нижней поверхности 8 удлиненной целостной полосы 3, и прямой линией, лежащей в горизонтальной плоскости 12 нулевого уровня.
Привод 9 в плане (при виде сверху в разрезе) в стационарном положении визуально выполнен в виде кривошипа.
Возможен первый вариант конструктивного выполнения предлагаемого устройства, при котором средство 11 для поддержания передних окончаний 4 удлиненных целостных полос 3 в заданном положении относительно горизонтальной плоскости 12, содержит переднюю ось 13, имеющую первое и второе противоположные окончания 14, 15, с помощью которых эта передняя ось 13 установлена с возможностью вращения в отверстиях 16, выполненных в передних участках 17 соответствующих боковых стенок 2. Взаимодействие нижней поверхности 8 переднего окончания 4 каждой удлиненной целостной полосы 3 с передней осью 13 выполнено с помощью подшипников качения 18, закрепленных вблизи соответствующих первого и второго противоположных окончаний 14, 15 и в центральной части передней оси 13.
При этом привод 9, как указано выше, выполнен с возможностью обеспечения соответствующим удлиненным целостным полосам 3 множества циклов указанных чередующихся этапов возвратно-поступательных и наклонных перемещений в противофазе, и содержит две поперечно соосные задние боковые оси 19, каждая из которых имеет первое окончание 20, установленное с возможностью вращения в отверстии 21, выполненном в заднем участке 22 соответствующей боковой стенки 2, и второе окончание 23, консольно размещенное под соответствующей удлиненной целостной полосой 3 с возможностью взаимодействия с нижней поверхностью 8 последней с помощью подшипников качения 24.
Кроме того, привод 9 содержит заднюю среднюю ось 25, поперечно соосно установленную между задними боковыми осями 19 с возможностью вращения и имеющую первое и второе окончания 26, 27, размещенные под соответствующими удлиненными целостными полосами 3 с возможностью взаимодействия с нижними поверхностями 8 последних с помощью подшипников качения 28.
При этом привод 9 содержит две задние периферийные оси 29, установленные в одной плоскости равноудаленно и параллельно с разных сторон между задней средней осью 25 и соответствующей задней боковой осью 19. Каждая периферийная ось 29 размещена под соответствующей удлиненной целостной полосой 3 с возможностью кругового перемещения вокруг продольной оси (а - а) задних средней оси 25 и боковых осей 19. Причем каждая периферийная ось 29 имеет соответствующие первое и второе окончания 30, 31, выполненные с возможностью взаимодействия с нижними поверхностями 8 соответствующих удлиненных целостных полос 3 с помощью подшипников качения 32.
При этом на втором окончании 23 каждой задней боковой оси 19 и первом и втором окончаниях 26, 27 задней средней оси 25 жестко закреплены первые концы 33 соответствующих задних кронштейнов 34, вторые концы 35 которых жестко скреплены с соответствующими первыми и вторыми окончаниями 30, 31 соответствующих задних периферийных осей 29.
На нижних поверхностях 8 соответствующих удлиненных целостных полос 3 закреплены водила 36, имеющие пазы 37, в которых размещены средние участки соответствующих задних периферийных осей 29, выполненных с возможностью передачи водилам 36 соответствующих движений. При этом водила 36 выполнены с возможностью передачи удлиненным целостным полосам 3 соответствующих перемещений и обеспечения указанных чередующихся этапов при осуществлении одного цикла перемещений в противофазе.
Из описанного выше варианта конструктивного выполнения предлагаемого устройства следует, что все составные части привода 9 выполнены с возможностью взаимодействия с нижними поверхностями 8 задних окончаний 5 соответствующих удлиненных целостных полос 3, что обеспечивает каждой удлиненной целостной полосе 3 при осуществлении одного цикла возвратно-поступательных и наклонных перемещений в противофазе следующих чередующихся этапов: на первом этапе привод 9 выполнен с возможностью обеспечения соответствующей полосе 3 перемещения назад от крайнего переднего положения до крайнего заднего положения и осуществления этого перемещения с нулевым углом α наклона заднего окончания 5 полосы 3 к горизонтальной плоскости 12; на втором этапе привод 9 выполнен с возможностью обеспечения соответствующей полосе 3 изменения направления перемещения при достижении задним окончанием 5 полосы 3 крайнего заднего положения первого этапа; на третьем этапе привод 9 выполнен с возможностью обеспечения соответствующей полосе 3 одновременного начала наклонных перемещений в направлениях вверх, вперед и вниз при изменении направления перемещения на втором этапе; на четвертом этапе привод 9 выполнен с возможностью обеспечения соответствующей полосе 3 осуществления начатых на третьем этапе наклонных перемещений с изменением угла α наклона к горизонтальной плоскости 12 до достижения передним окончанием 4 полосы 3 крайнего переднего положения первого этапа.
Это исключает необходимость наличия множества отдельных приспособлений для взаимодействия со всей нижней поверхностью 8 каждой отдельной полосы 3, позволяет упростить конструктивное выполнение опорных удлиненных целостных полос 3 и привода 9 и обеспечить точное воспроизведение множества указанных циклов чередующихся этапов возвратно-поступательных и наклонных перемещений опорных удлиненных целостных полос 3 в противофазе. Это исключает принудительный подъем стопы и пятки пользователя при движении соответствующей полосы 3 назад от момента размещения переднего окончания 4 полосы 3 в крайнем переднем положении (ПП) до момента достижения задним окончанием 5 полосы 3 крайнего заднего положения (ЗП), что соответствует правильному движению ног при ходьбе здорового человека. Это, в свою очередь, обеспечивает возможность автоматического закрепления в сознании пользователя правильного стереотипа движения ног при ходьбе, что способствует реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы. Это соответствует правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы.
Вдоль длинных сторон удлиненных целостных полос 3 может быть размещено любое известное средство для опоры рук пользователя, например, поручень (на чертеже не показано).
Это обеспечивает поддержание равновесия пользователя при осуществлении указанного множества циклов указанных чередующихся этапов, что способствует реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории и правильного движения ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы пользователя, имеющего конкретные особенности походки.
Над удлиненными целостными полосами 3 может быть закреплено средство (на чертеже не показано) для поддержания тела пользователя, выполненное любой известной конструкции, например, ЕА 39202 «УСТРОЙСТВО ДЛЯ РЕАБИЛИТАЦИОННОЙ ВЕРТИКАЛИЗАЦИИ ПОЛЬЗОВАТЕЛЯ».
Это обеспечивает придание и поддержание вертикального положения пользователю, страховки от падения и уменьшения весовой нагрузки на суставы нижних конечностей пользователя. Это обеспечивает возможность упрощения конструктивного выполнения опорных полос 3 и привода 9 и облегчает точное воспроизведение множества циклов указанных чередующихся этапов положений и перемещений опорных удлиненных целостных полос 3 в противофазе без применения множества дополнительных приспособлений привода 9, что обеспечивает возможность автоматического закрепления в сознании пользователя правильного стереотипа движения ног при ходьбе, что способствует реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы. Это соответствует правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы.
Оборудование предлагаемого устройства настраивают под физическое состояние конкретного пользователя, что стимулирует активность пользователя, повышает эффективность его реабилитации, обеспечивает свободное движение его суставов. При этом происходит тренировка правильной осанки, равновесия, способности переноса веса с одной ноги на другую. Причем ширину шага конкретного пользователя подбирают с учетом его анатомических особенностей, от чего зависит выбор длины заднего кронштейна 34. Для обеспечения возможности использования предлагаемого устройства пользователями с разной длиной шага каждый задний кронштейн 34 имеет длину от 10 до 30 см (разные типоразмеры). Это дает возможность конструктивно заменять задние кронштейны 34 под длину шага при настройке предлагаемого устройства под каждого конкретного пользователя, что обеспечивает правильное движение ног при ходьбе здоровых пользователей с разной длиной шага по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы разных пользователей.
Для улучшения точного воспроизведения указанного множества циклов чередующихся этапов положений и перемещений опорных удлиненных целостных полос 3, соответствующих правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть соответствующих осуществлению полного паттерна ходьбы, и обеспечения возможности автоматического закрепления в сознании пользователя правильного стереотипа движения ног при ходьбе, способствующего реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы, нижняя поверхность 8 каждой отдельной удлиненной целостной полосы 3 выполнена плоской, кроме того, передняя ось 13, две задние боковые оси 19 и задняя средняя ось 25 установлены на одном уровне, при этом, в отверстиях 16, 21, соответственно, выполненных в передних и задних участках 17 и 22 боковых стенок 2 и в пазах 37 водила 36, установлены подшипники качения 38.
Как было описано выше каждая удлиненная целостная полоса 3 имеет верхнюю поверхность 6, на которой закреплена площадка (зона) 7 (фиг.2, 4) для размещения стопы пользователя. Площадка 7 расположена на верхней поверхности 6 каждой удлиненной целостной полосы 3 между местом расположения под полосами 3 передней оси 13 и задних боковых осей 19 привода 9 при любых перемещениях указанных полос 3. На каждой площадке 7 закреплено средство 39 для фиксации стопы пользователя, имеющее приспособление 40 для регулирования плотности фиксации, например, ремешки 41.
Возможен вариант выполнения настоящего изобретения, при котором на четвертом этапе привод 9 выполнен с возможностью обеспечения переднему окончанию 4 соответствующей удлиненной целостной полосы 3 перед достижением крайнего переднего положения на первом этапе дополнительного перемещения в направлении вверх.
Это улучшает воспроизведение правильного стереотипа ходьбы конкретных пользователей, у которых в здоровом состоянии походка была с поднятием носка в заключительной стадии шага. Это способствует реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории и правильного движения ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы пользователя, имеющего конкретные особенности походки.
В этом случае используют второй вариант конструктивного выполнения предлагаемого устройства, при котором средство 42 (фиг. 3) для поддержания передних окончаний 4 удлиненных целостных полос 3 в заданном положении относительно горизонтальной плоскости 12 приспособлено для взаимодействия с нижними поверхностями 8 передних окончаний 4 удлиненных целостных полос 3 и выполнено составным из нескольких частей, содержащих две поперечно соосные передние боковые оси 43, каждая из которых имеет первое окончание 44, размещенное с возможностью вращения в отверстии 16, выполненном в переднем участке 17 соответствующей боковой стенки 2, и второе окончание 45, консольно размещенное под соответствующей удлиненной целостной полосой 3 с возможностью взаимодействия с нижней поверхностью 8 этой полосы 3 с помощью подшипников качения 18. Средство 42 также содержит переднюю центральную ось 46, поперечно соосно установленную между передними боковыми осями 43 с возможностью вращения и имеющую первое и второе окончания 47, 48, размещенные под соответствующими удлиненными целостными полосами 3 с возможностью взаимодействия с нижними поверхностями 8 последних с помощью подшипников качения 18, две передние периферийные оси 49, установленные равноудаленно и параллельно с разных сторон между передней центральной и соответствующей передней боковой осями 46, 43, размещенные под соответствующими удлиненными целостными полосами 3 с возможностью кругового перемещения вокруг продольной оси (б - б) передней центральной и передних боковых осей 46, 43. Каждая передняя периферийная ось 49 имеет соответствующие первое и второе окончания 50, 51, выполненные с возможностью взаимодействия с нижними поверхностями 8 соответствующих удлиненных целостных полос 3 с помощью подшипников качения 18. При этом на втором окончании 45 каждой передней боковой оси 43 и первом и втором окончаниях 47,48 передней центральной оси 46 жестко закреплены первые концы 52 соответствующих передних кронштейнов 53, вторые концы 54 которых жестко скреплены с соответствующими первыми и вторыми окончаниями 50, 51 соответствующих передних периферийных осей 49, приспособленных для обеспечения перемещения переднему окончанию 4 каждой удлиненной целостной полосы 3 в направлении вверх перед достижением крайнего переднего положения (ПП) с помощью средства 55, подсоединенного к двигателю 10 привода 9 для передачи синхронного вращения от задней средней оси 25 к передней центральной оси 46. Средство 55 подсоединено к двигателю 10 привода 9.
В этом варианте выполнения предлагаемого устройства средство 42 для поддержания передних окончаний 4 удлиненных целостных полос 3 в заданном положении относительно горизонтальной плоскости 12 выполнено в виде кривошипа.
Каждый передний кронштейн 53 имеет длину от 4 до 10 см (разные типоразмеры). Это дает возможность конструктивно заменять передние кронштейны 53 под особенности походки каждого конкретного пользователя при настройке предлагаемого устройства. Это соответствует правильному движению ног при ходьбе здоровых пользователей по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы разных пользователей.
Средство 55 для передачи синхронного вращения от задней средней оси 25 к передней центральной оси 46 содержит переднюю и заднюю звездочки 56, жестко закрепленные на соответствующих центральных участках передней центральной оси 46 и задней средней оси 25 и жестко соединенные между собой посредством цепи 57. Средство 55 подсоединено к двигателю 10 привода 9 через заднюю среднюю ось 25, соответствующий задний кронштейн 34, заднюю периферийную ось 29, соответствующий задний кронштейн 34 и соответствующую заднюю боковую ось 19 привода 9.
Для обеспечения идентичности повторяемых циклов передняя и задняя звездочки 56 имеют одинаковое количество зубьев.
При этом средство 55 для передачи синхронного вращения от задней средней оси 25 к передней центральной оси 46 может быть выполнено в другом варианте, например, вместо передней и задней звездочек 56 может содержать передний и задний шкивы (на чертеже не показано), жестко закрепленные на соответствующих центральных участках передней центральной оси 46 и задней средней оси 25 и соединенные между собой посредством приводного ремня (на чертеже не показано).
Двигатель 10 привода 9 представляет собой электродвигатель, подсоединенный к одной из задних боковых осей 19. В качестве двигателя 10 может быть использован любой известный двигатель, выполненный с возможностью обеспечения указанных перемещений составным элементам привода 9.
Для исключения смещения подшипников качения 38 и удержания водил 36 в заданном положении на наружной поверхности каждой задней периферийной оси 29 между подшипниками качения 38 и 32 установлены распорные втулки 58.
Для исключения смещения подшипников качения 18, размещенных на передней оси 13 и передней центральной оси 46 на их наружных поверхностях установлены распорные втулки 58.
Все описанные выше жесткие соединения конструктивных элементов выполнены, например, посредством шпонок 59. При этом жесткие соединения описанных выше конструктивных элементов могут быть выполнены любым другим известным способом, например, сваркой.
Таким образом использование предлагаемого устройства исключает необходимость наличия множества отдельных приспособлений для взаимодействия с нижними поверхностями 8 каждой отдельной опорной полосы 3, что позволяет упростить конструктивное выполнение опорных удлиненных целостных полос 3 и привода 9, обеспечить точное воспроизведение множества циклов чередующихся этапов перемещений опорных удлиненных целостных полос 3, исключить принудительный подъем стопы и пятки пользователя при движении соответствующей удлиненной полосы 3 назад от момента размещения переднего окончания 4 полосы 3 в крайнем переднем положении до момента достижения задним окончанием 5 полосы 3 крайнего заднего положения и обеспечить возможность автоматического закрепления в сознании пользователя правильного стереотипа движения ног при ходьбе, что способствует реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы. Это соответствует правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы.
Устройство работает следующим образом.
В статичном положении предлагаемого устройства на основании 1 между боковыми стенками 2 размещены две расположенные рядом удлиненные целостные полосы 3.
Передние окончания 4 удлиненных целостных полос 3 взаимодействуют со средством 11 для их поддержания в заданном положении относительно горизонтальной плоскости 12 с помощью подшипников 18 качения. При этом передние окончания 4 находятся в той же горизонтальной плоскости 12.
При включенном электродвигателе 10 привода 9 нижние поверхности 8 задних окончаний 5 удлиненных целостных полос 3 с помощью подшипников качения 24, 28, 32 взаимодействуют с приводом 9, нижние поверхности 8 передних окончаний 5 удлиненных целостных полос 3 с помощью подшипников качения 18 взаимодействуют с выполненной с возможностью вращения передней осью 13 средства 11.
При этом привод 9 обеспечивает удлиненным целостным полосам 3 при осуществлении одного цикла возвратно-поступательных и наклонных перемещений в противофазе следующие чередующиеся этапы.
На первом этапе привод 9 перемещает назад соответствующую полосу 3 от крайнего переднего положения (ПП) до крайнего заднего положения (ЗП) с нулевым углом (а) наклона заднего окончания 5 полосы 3 к горизонтальной плоскости 12. То есть при перемещении назад полоса 3 и ее заднее окончание 5 движется без поднятия вверх до достижения крайнего заднего положения (ЗП).
В этом положении происходит остановка перемещения назад соответствующей полосы 3. То есть в данном положении полосы 3 исключена возможность поднятия вверх стопы и пятки пользователя, размещенных на площадке 7 верхней поверхности 6 полосы 3, что соответствует правильному стереотипу движения ног при ходьбе и реализации и закреплению в сознании пользователя естественной, самостоятельной и индивидуальной траектории подъема стопы и пятки и работы голеностопных, коленных, бедренных суставов и суставов стоп у пользователей с нарушениями функции ходьбы. Это соответствует правильному движению ног при ходьбе здорового человека по ровной поверхности, то есть обеспечивает осуществление полного паттерна ходьбы.
На втором этапе привод 9 изменяет направление перемещения полосы 3 при достижении задним окончанием 5 полосы 3 крайнего заднего положения (ЗП) первого этапа, а затем на третьем этапе привод 9 передает соответствующей полосе 3 одновременное начало перемещений в направлениях вверх, вперед и вниз. При этом на четвертом этапе привод 9 перемещает соответствующую полосу 3 с изменением угла α наклона к горизонтальной плоскости 12 до достижения передним окончанием 4 этой полосы 3 крайнего переднего положения (ПП) первого этапа.
Обе полосы 3 постоянно опираются на конструктивные элементы (две оси 19, ось 25 и две оси 29) привода 9 и переднюю ось 13 через соответствующие подшипники качения 24, 28, 32, 18. Необходимый для вращения осей 19, 25 крутящий момент может быть приложен к средней задней оси 25 или одной из боковых задних осей 19 от внешнего источника.
Движение полос 3 привод 9 осуществляет с помощью водил 36, находящихся в постоянном контакте с периферийными задними осями 29 привода 9.
Когда какая-либо из двух задних периферийных осей 29 привода 9 расположена в горизонтальной плоскости 12, а при вращении привода 9 опускается вниз и движется в сторону от передней оси 13, водило 36 движет соответствующую полосу 3 в ту же сторону, заставляя ее перемещаться назад по передней оси 13, по средней задней оси 25 и боковым задним осям 19 привода 9 до крайнего заднего положения (ЗП).
Пройдя нижнюю половину кругового движения, поднявшись вновь до горизонтальной плоскости 12 и продолжая вращение, соответствующая задняя периферийная ось 29 начинает поднимать заднее окончание 5 полосы 3, а водило 36 начинает перемещать полосу 3 в противоположную сторону, то есть в сторону передней оси 13. Завершив круг и достигнув горизонтальной плоскости 12 задняя периферийная ось 29 снова опускает заднее окончание 5 полосы 3 на соответствующие подшипники качения 24, 28 задней средней оси 25 и задних боковых осей 19 привода 9.
Аналогичное движение осуществляет вторая периферийная ось 29, перемещающая вторую полосу 3 в противофазе.
При описанном выше втором варианте конструктивного выполнения устройства при включенном электродвигателе 10 через цепь 57 передают вращение с помощью передней и задней звездочек 56 от задней средней оси 25 к передней центральной оси 46, а также передним и задним кронштейнам 53, 34, которые совершают круговое движение вокруг задней средней оси 25 и передней центральной оси 46.
Задние кронштейны 34 через подшипники 32 приводят в движение соответствующие полосы 3 посредством водила 36, циклически перемещая эти полосы 3 в противофазе. Когда траектория движения подшипников 32 находится ниже горизонтальной плоскости 12, образуемой опорными поверхностями подшипников 18 передних центральных и боковых осей 46, 43, водило 36 перемещает соответствующие полосы 3 назад. Когда траектория движения подшипников 32 находится выше горизонтальной плоскости 12, образуемой опорными поверхностями подшипников 18 передних центральных и боковых осей 46, 43, водило 36 перемещает соответствующие полосы 3 вперед, поднимая их над горизонтальной плоскостью 12. При этом передние окончания 4 полос 3 также циклически поднимаются на подшипниках 18 передних периферийных осей 49 передних кронштейнов 53, а затем опускаются на подшипники 18 передних центральных и боковых осей 46, 43 этих же кронштейнов 53.
При этом каждая полоса 3 имеет возможность перемещения вверх в вертикальной плоскости только тогда, когда плоско - параллельное перемещение соответствующей полосы 3 назад на первом этапе полностью прекратится и пока не начнется перемещение вперед и вниз на третьем этапе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УМЕНЬШЕНИЯ СИЛЫ ДАВЛЕНИЯ ТЕЛА ПОЛЬЗОВАТЕЛЯ НА ОПОРНУЮ ПОВЕРХНОСТЬ | 2022 |
|
RU2780684C1 |
| СПОСОБ ОБУЧЕНИЯ ХОДЬБЕ И ДВИЖЕНИЯМ ПАЦИЕНТА С ПСИХОНЕВРОЛОГИЧЕСКИМИ НАРУШЕНИЯМИ И ЗАБОЛЕВАНИЯМИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2454986C1 |
| СПОСОБ ЛЕЧЕНИЯ ЦЕРЕБРАЛЬНОГО СПАСТИЧЕСКОГО ПАРАЛИЧА | 2001 |
|
RU2201773C2 |
| Способ комплексной медицинской реабилитации пациентов после реконструктивных операций по поводу переломов костей нижних конечностей на основе технологии виртуальной реальности с БОС | 2024 |
|
RU2831885C1 |
| МЯГКИЙ МНОГОРЕЖИМНЫЙ ЭКЗОСКЕЛЕТ | 2022 |
|
RU2797688C1 |
| Способ комплексной санаторно-курортной реабилитации пациентов с рассеянным склерозом при ремиттирующем течении заболевания | 2022 |
|
RU2782656C1 |
| ТРЕНАЖЕР-КОРРЕКТОР МЫШЕЧНОГО ДИСБАЛАНСА В НИЖНИХ КОНЕЧНОСТЯХ | 1997 |
|
RU2124342C1 |
| Способ определения степени тяжести динамических и биомеханических нарушений в ходьбе и беге | 2023 |
|
RU2814503C1 |
| Способ использования виртуальной цифровой модели ходьбы пациента для дифференцированного построения индивидуальной программы физической реабилитации в раннем восстановительном периоде ишемического инсульта в зависимости от бассейна поражения | 2020 |
|
RU2741860C1 |
| СПОСОБ ЛЕЧЕБНОЙ ФИЗКУЛЬТУРЫ ПРИ КОСОЛАПОСТИ | 1999 |
|
RU2152768C1 |
Изобретение относится к медицинской технике. Устройство для тренировки функций ходьбы содержит основание, на котором закреплены боковые стенки, между которыми размещены два расположенных рядом опорных элемента, каждый из которых имеет верхнюю поверхность, содержащую площадку для размещения стопы пользователя, и нижнюю поверхность, выполненную с возможностью взаимодействия с приводом, имеющим двигатель и приспособленным для обеспечения опорным элементам множества циклов чередующихся этапов возвратно-поступательных и наклонных перемещений в противофазе. Каждый опорный элемент представляет собой удлиненную целостную полосу, имеющую переднее и заднее окончания. Между боковыми стенками под передними окончаниями удлиненных целостных полос с возможностью вращения размещено средство для поддержания передних окончаний относительно горизонтальной плоскости. Привод выполнен с возможностью взаимодействия с нижними поверхностями задних окончаний и осуществления цикла возвратно-поступательных и наклонных перемещений удлиненных целостных полос в противофазе, включающих чередующиеся этапы. На первом этапе осуществляют перемещение назад от крайнего переднего положения до крайнего заднего положения с нулевым углом наклона заднего окончания полосы к горизонтальной плоскости. На втором - изменение направления перемещения при достижении задним окончанием полосы крайнего заднего положения. На третьем - одновременное начало наклонных перемещений в направлениях вверх, вперед и вниз при изменении направления перемещения. И на четвертом - продолжение начатых наклонных перемещений с изменением угла (α) наклона к горизонтальной плоскости до достижения передним окончанием полосы крайнего переднего положения. Технический результат состоит в упрощении и обеспечении точности воспроизведения циклов движения ног. 18 з.п. ф-лы, 6 ил.
1. Устройство для тренировки функций ходьбы, содержащее основание, на котором закреплены боковые стенки, между которыми размещены два расположенных рядом опорных элемента, каждый из которых имеет верхнюю поверхность, содержащую площадку для размещения стопы пользователя, и нижнюю поверхность, выполненную с возможностью взаимодействия с приводом, имеющим двигатель и приспособленным для обеспечения опорным элементам множества циклов чередующихся этапов возвратно-поступательных и наклонных перемещений в противофазе, отличающееся тем, что каждый опорный элемент представляет собой удлиненную целостную полосу, имеющую переднее и заднее окончания, между боковыми стенками под передними окончаниями удлиненных целостных полос с возможностью вращения размещено средство для поддержания передних окончаний относительно горизонтальной плоскости, а привод выполнен с возможностью взаимодействия с нижними поверхностями задних окончаний и осуществления цикла возвратно-поступательных и наклонных перемещений удлиненных целостных полос в противофазе, включающих следующие чередующиеся этапы:
I) перемещение назад от крайнего переднего положения до крайнего заднего положения с нулевым углом (а) наклона заднего окончания полосы к горизонтальной плоскости,
II) изменение направления перемещения при достижении задним окончанием полосы крайнего заднего положения,
III) одновременное начало наклонных перемещений в направлениях вверх, вперед и вниз при изменении направления перемещения,
IY) продолжение начатых наклонных перемещений с изменением угла (а) наклона к горизонтальной плоскости до достижения передним окончанием полосы крайнего переднего положения.
2. Устройство по п. 1, отличающееся тем, что каждая удлиненная целостная полоса представляет собой цельный и прямолинейный элемент, полностью или частично выполненный из высокопрочных титанового сплава ВТ6 или алюминиевого сплава Д16Т.
3. Устройство по п. 1, отличающееся тем, что каждая удлиненная целостная полоса выполнена из жестко соединенных продольных частей с образованием прямолинейного элемента, полностью или частично выполненного из титанового или алюминиевого сплавов.
4. Устройство по п. 1, отличающееся тем, что привод размещен под задними окончаниями удлиненных целостных полос.
5. Устройство по п. 1, отличающееся тем, что на четвертом этапе IY привод выполнен с возможностью дополнительного перемещения в направлении вверх переднего окончания удлиненной целостной полосы перед достижением крайнего переднего положения.
6. Устройство по п. 1, отличающееся тем, что на каждой площадке для размещения стопы закреплено средство для фиксации стопы пользователя, имеющее приспособление для регулирования плотности фиксации.
7. Устройство по п. 1, отличающееся тем, что вдоль длинных сторон удлиненных целостных полос размещено средство для опоры рук пользователя.
8. Устройство по п. 1, отличающееся тем, что над удлиненными целостными полосами закреплено средство для поддержания тела пользователя.
9. Устройство по п. 1, отличающееся тем, что средство для поддержания передних окончаний удлиненных целостных полос относительно горизонтальной плоскости выполнено с возможностью взаимодействия с нижними поверхностями передних окончаний удлиненных целостных полос и содержит переднюю ось, имеющую первое и второе противоположные окончания, с помощью которых эта ось установлена с возможностью вращения в отверстиях передних участках боковых стенок, а взаимодействие нижней поверхности переднего окончания каждой удлиненной целостной полосы с передней осью осуществлено подшипниками качения, закрепленными на первом и втором окончаниях и в центральной части передней оси.
10. Устройство по п. 1, отличающееся тем, что привод содержит две поперечные соосные задние боковые оси, каждая из которых имеет первое окончание, установленное с возможностью вращения в отверстии в заднем участке боковой стенки, и второе окончание, консольно размещенное под соответствующей удлиненной целостной полосой с возможностью взаимодействия с нижней поверхностью последней с помощью подшипников качения, заднюю среднюю ось, соосно установленную между задними боковыми осями с возможностью вращения и имеющую первое и второе окончания, размещенные под удлиненными целостными полосами с возможностью взаимодействия с их нижними поверхностями с помощью подшипников качения, две задние периферийные оси, установленные равноудаленно и параллельно с разных сторон между задними средней и задней боковой осями, при этом каждая задняя периферийная ось размещена под соответствующей удлиненной целостной полосой с возможностью кругового перемещения вокруг задних средней и боковых осей и имеет первое и второе окончания, выполненные с возможностью взаимодействия с нижними поверхностями удлиненных целостных полос с помощью подшипников качения, при этом на втором окончании каждой задней боковой оси и первом и втором окончаниях задней средней оси жестко закреплены первые концы задних кронштейнов, вторые концы которых жестко скреплены с первыми и вторыми окончаниями задних периферийных осей, а на нижних поверхностях удлиненных целостных полос закреплены водила, имеющие пазы для размещения средних участков задних периферийных осей, выполненных с возможностью передачи движений водилам, которые выполнены с возможностью передачи перемещений удлиненным целостным полосам и обеспечения чередующихся этапов при осуществлении одного цикла перемещений в противофазе.
11. Устройство по п. 9, отличающееся тем, что каждый задний кронштейн имеет длину от 10 до 30 см.
12. Устройство по п. 9, отличающееся тем, что нижняя поверхность каждой отдельной удлиненной целостной полосы выполнена плоской.
13. Устройство по п. 9, отличающееся тем, что передняя ось, две задние боковые оси и задняя средняя ось установлены на одном уровне.
14. Устройство по п. 9, отличающееся тем, что подшипники качения установлены в отверстиях в передних и задних участках боковых стенок и в пазах водила.
15. Устройство по пп. 5 и 9, отличающееся тем, что площадка для размещения стопы пользователя расположена на верхней поверхности каждой удлиненной целостной полосы между местом расположения под полосами передней оси и задних боковых осей привода.
16. Устройство по п. 1, отличающееся тем, что средство для поддержания передних окончаний удлиненных целостных полос относительно горизонтальной плоскости имеет части, содержащие две поперечные соосные передние боковые оси, каждая из которых имеет первое окончание, размещенное с возможностью вращения в отверстии в переднем участке боковой стенки, и второе окончание, консольно размещенное под удлиненной целостной полосой с возможностью взаимодействия с нижней поверхностью последней с помощью подшипников качения, переднюю центральную ось, соосно установленную между передними боковыми осями с возможностью вращения и имеющую первое и второе окончания, размещенные под удлиненными целостными полосами с возможностью взаимодействия с их нижними поверхностями с помощью подшипников качения, две передние периферийные оси, установленные равноудаленно и параллельно с разных сторон между передней центральной и соответствующей передней боковой осями, размещенные под соответствующими удлиненными целостными полосами с возможностью кругового перемещения вокруг передних боковых и центральной осей, при этом каждая передняя периферийная ось имеет первое и второе окончания, выполненные с возможностью взаимодействия с нижними поверхностями удлиненных целостных полос с помощью подшипников качения, причем на втором окончании каждой передней боковой оси и первом и втором окончаниях передней центральной оси жестко закреплены первые концы передних кронштейнов, вторые концы которых жестко скреплены с первыми и вторыми окончаниями передних периферийных осей, выполненных с возможностью кругового перемещения вокруг продольной оси (б - б) передних центральной и боковых осей и приспособленных для обеспечения перемещения переднего окончания каждой удлиненной целостной полосы в направлении вверх перед достижением крайнего переднего положения с помощью средства для передачи синхронного вращения от задней средней оси к передней центральной оси, подсоединенного к двигателю привода.
17. Устройство по п. 16, отличающееся тем, что каждый передний кронштейн имеет длину от 4 до 10 см.
18. Устройство по п. 9, отличающееся тем, что двигатель привода представляет собой электродвигатель, подсоединенный к одной из задних боковых осей.
19. Устройство по п. 16, отличающееся тем, что средство для передачи синхронного вращения от задней средней оси к передней центральной оси содержит переднюю и заднюю звездочки, жестко закрепленные на центральных участках передней центральной оси и задней средней оси, имеющие одинаковое количество зубьев и соединенные между собой посредством цепи.
| Устройство для тренировки и восстановления паттерна ходьбы | 2018 |
|
RU2671343C1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ДЛЯ ПРИВОДОВ ВЫСОКОВОЛЬТНЫХ ВЫКЛЮЧАТЕЛЕЙ | 1967 |
|
SU216075A2 |
| СВЕРХВЫСОКОЧАСТОТНЫЙ ФАЗОВРАЩАТЕЛЬ | 0 |
|
SU201482A1 |
| US 20200016453 A1, 16.01.2020 | |||
| DE 102014100460 A1, 16.07.2015 | |||
| WO 2014202767 A1, 24.12.2014 | |||
| US 20160136477 A1, 19.05.2016. | |||

