Способ относится к области электрорадиотехники, а именно к технике радиосвязи, и может быть использован в системах одночастотной передачи данных, а также в системах радиозондирования для измерения доплеровского смещения несущей частоты сигнала в информационно-измерительных устройствах без априорной информации о модулирующем сообщении.
Как известно, доплеровское смещение несущей частоты сигнала может быть вызвано движением источника и/или приемника, а также движением отражающей радиосигнал поверхности (например, для КВ радиосвязи характерно изменение высоты слоя ионосферы). В частности, наличие доплеровского смещения частоты приводит к значительному снижению помехоустойчивости систем передачи данных.
Для повышения эффективности современных систем радиосвязи, необходимо постоянно знать условия распространения между передающей и приемной сторонами на заданной частоте в конкретный момент времени. Для этого осуществляют тестирование (зондирование) канала, с целью получения оценок параметров канала, таких как отношение сигнал/шум (ОСШ), наличие многолучевости, доплеровское смещение частоты и другие. Для такого тестирования в подавляющем большинстве систем используют различные тестовые сигналы.
В частности, для измерения доплеровского смещения частоты часто используют сигналы с линейной частотной модуляцией (ЛЧМ). Например, в патенте РФ №2316898 [RU Способ одновременного измерения частотных зависимостей доплеровского смещения частоты и времени распространения коротковолновых сигналов в ионосферной радиолинии, 10.02.2008], или в способе оценки доплеровского смещения описанным в [Sharif B.S., Neashan J., Hinton O.R., Adams A.E. A computationally efficient doppler compensation system for underwater acoustic communication // Oceanic Engineering, IEEE Journal of. - 2000. Vol. 25, №.1. - P. 52-61].
Также известны способы, в которых для оценки доплеровского смещения излучается узкополосный тональный (гармонический) сигнал на одной несущей частоте или модулированный псевдослучайной М-последовательностью. Для случая использования гармонического сигнала принятый сигнал преобразуют с использованием преобразования Фурье, получают спектр, выбирают сигнал с максимальной частотой, который соотносят со значением несущей частоты излученного для определения доплеровского масштабирующего коэффициента и затем определяют величину доплеровского смещения [Оппенгейм Э. Применение цифровой обработки сигналов. - М.: Мир, 1980, 553 с.]. При использовании модулированных сигналов обычно применяют различные корреляционные методы, например, [Johnson М., Freitag L., Stojanovic М. Improved Doppler tracking and correction for underwater acoustic communications // in Proc. ICASSP '97, Munich, Germany, Apr. 1997, P. 575-578].
Недостаток указанных способов заключается в том, что для оценки доплеровского смещения частоты используются специальные тестовые сигналы, что снижает информационную скорость.
Известен патент №4706286 [US Sturza; Mark A., Method and circuit for extraction of Doppler information from a pseudonoise modulated carrier, November 10, 1987], основанный на нелинейной операции второго порядка и принятый за прототип. Способ, описанный в указанном патенте предполагает: смешивание принятого сигнала с гетеродинной частотой меньше предполагаемой частоты доплеровского сдвига хотя бы в два раза, а также смешивание принятого сигнала с гетеродинной частотой больше предполагаемой частоты доплеровского сдвига хотя бы в два раза, фильтрацию низкочастотных компонент, смешивание полученных низкочастотных компонент и последующую низкочастотную фильтрацию, после чего путем преобразования Фурье получение оценки доплеровского сдвига частоты.
Недостатком прототипа является то, что данный описанный способ дает серьезную ошибку при определении доплеровского сдвига частоты для сигналов с фазовой манипуляцией, на длительности символа которых укладывается не целое число периодов (например, для авиационных модемов стандарта ARINC 635). Кроме того точность получаемой оценки напрямую связаны с выбранной частотой дискретизации и числом отсчетов на котором вычисляется преобразование Фурье и, в ряде существующих систем передачи данных (например, в КВ и УКВ системах) будет также давать значительную погрешность.
Целью изобретения является определение (получение оценки) доплеровского смещения частоты по информационному фазоманипулированному сигналу.
Поставленная цель достигается тем, что способ
состоит в том, что принимают информационный фазоманипулированный сигнал, соответствующий N символам, оценивают значения фаз Ф1, Ф2, Ф3 каждых трех соседних символов, вычисляют разности фаз ΔФ1=Ф3-2⋅Ф2+Ф1 и ΔФ2=Ф3-Ф1, преобразовывают полученные разности фаз ΔФ'1=atan2(sin(ΔФ1), cos(ΔФ1)) и ΔФ'2=atan2(sin(ΔФ2), cos(ΔФ2)), вычисляют разность преобразованных разностей фаз ΔΨ=ΔФ'2-ΔФ'1, после чего вычисляют экспоненту, получая значение ехр(i⋅ΔΨ), суммируют с накоплением получаемые N-2 значения экспонент  после чего вычисляют фазу суммарного накопленного вектора
после чего вычисляют фазу суммарного накопленного вектора  получая значение фазы ψ, которое умножают на экспонент
получая значение фазы ψ, которое умножают на экспонент  при этом при n=0 значение вектора обнуляют, т.е.
при этом при n=0 значение вектора обнуляют, т.е.  после чего вычисляют
после чего вычисляют  а при n=N-2 вычисляют фазу суммарного накопленного вектора
а при n=N-2 вычисляют фазу суммарного накопленного вектора  получая значение фазы
получая значение фазы  которое умножают на коэффициент 1/(4πТсимв)=Fсимв/(4π), где Тсимв - длительность символа, Fсимв - частота следования символов, в результате получая значение доплеровского сдвига частоты.
которое умножают на коэффициент 1/(4πТсимв)=Fсимв/(4π), где Тсимв - длительность символа, Fсимв - частота следования символов, в результате получая значение доплеровского сдвига частоты.
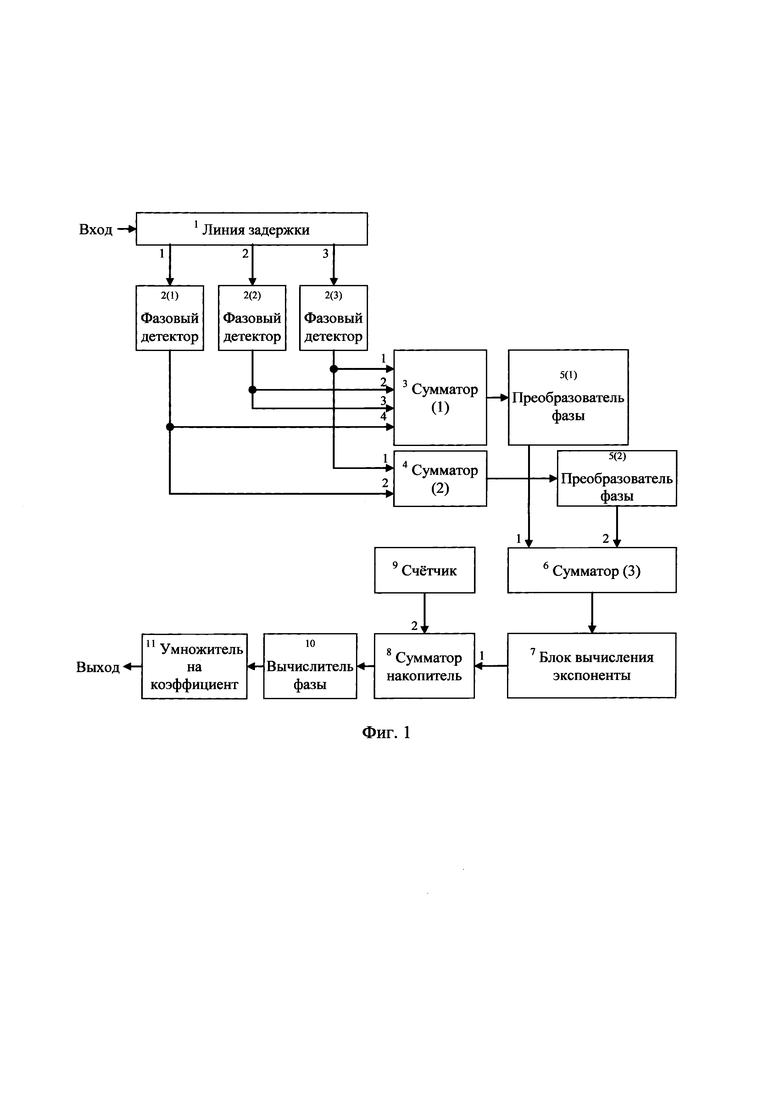
На фиг. 1 представлена структурная схема способа определения доплеровского сдвига частоты по информационному фазоманипулированному сигналу на основе анализа отклонения разности фаз 2 порядка. Она содержит:
1 - линия задержки;
2(1), 2(2), 2(3) - фазовый детектор;
3 - первый сумматор;
4 - второй сумматора;
5(1), 5(2) - преобразователь фазы;
6 - третий сумматор;
7 - блок вычисления экспоненты;
8 - сумматор накопитель;
9 - счетчик;
10 - вычислитель фазы;
11 - умножитель на коэффициент.
Работа способа осуществляется следующим образом. Принимают информационный фазоманипулированный сигнал, соответствующий N символам, который подают на вход линии задержки 1. Модуляция сигнала может быть абсолютной, относительной или фазоразностной фазовой манипуляцией. При этом сигнал является информационным, т.е. его модулированная информационная последовательность бит заранее неизвестна. На первом, втором и третьим выходах линии задержки 1 получают сигналы, соответствующие трем соседним символам, т.е. 1-й, 2-й, 3-й символы, затем 2-й, 3-й, 4-й символы и т.д.
Сигналы, соответствующие трем соседним символам подают на вход фазовых детекторов 2(1), 2(2), 2(3), на выходе которых получают абсолютные значения фаз соответствующих символов Ф3, Ф2, Ф1, каждый из которых содержит следующие компоненты:
Фk=ϕk+ψ+k⋅2π⋅Δƒ⋅Тсимв+ξk,
где k - номер символа, ϕk - значение фазы символа (0, π), ψ - постоянное смещение фазы, Δƒ - значение доплеровского сдвига частоты, Тсимв - длительность символа (при этом Тсимв=1/Fсимв), ξk - погрешность фазы, связанная с шумом.
Значения фаз соответствующих символов Ф3, Ф2, Ф1 с выхода фазовых детекторов 2(1), 2(2), 2(3) подают на входы первого и второго сумматоров 3, 4. При чем, значение фазы Ф3 с выхода фазового детектора 2(1) подают на четвертый вход первого сумматора 3 и второй вход второго сумматора 4, значение фазы Ф2 с выхода фазового детектора 2(2) подают на второй и третий входы первого сумматора 3 со знаком минус, значение фазы Ф1 с выхода фазового детектора 2(3) подают на первый вход первого сумматора 3 и первый вход второго сумматора 4 со знаком минус. В результате на выходе первого сумматора 3 получают разность фаз ΔФ1=Ф3-2⋅Ф2+Ф1, являющуюся разностью фаз второго порядка (страницы 39-43 в [Окунев Ю.Б. Цифровая передача информации фазоманипулированными сигналами. М.: Радио и связь. - 1991. - 296 с.]). На выходе второго сумматора 4 разность фаз ΔФ2=Ф3-Ф1. Полученные разности фаз подают на вход соответствующих первого и второго преобразователя фазы 5(1), 5(2), в которых преобразовывают полученные разности фаз следующим образом:


Функция atan2(y,x) - вычисляет арктангенс от значения у/х, причем α=atan2(Y,X) на интервале - π≤α≤π [страница 336, Nelson H.F. Beebe. The Mathematical-Function Computation Handbook: Programming Using. Springer. - 2017.].
С выхода первого преобразователя фазы 5(1) на первый вход третьего сумматор 6 подают значение  со знаком минус, а с выхода второго преобразователя фазы 5(2) на второй вход третьего сумматор 6 подают значение
со знаком минус, а с выхода второго преобразователя фазы 5(2) на второй вход третьего сумматор 6 подают значение  В результате на выходе третьего сумматора 6 получают разность преобразованных разностей фаз:
В результате на выходе третьего сумматора 6 получают разность преобразованных разностей фаз:
которую подают на вход блока вычисления экспоненты 7. В блоке вычисления экспоненты 7 вычисляют экспоненту, получая значение ехр(i⋅ΔΨ), которое передают на первый вход сумматора накопителя 8. На второй вход сумматора накопителя 8 с выхода счетчика 9 поступает номер n=0,1…N-2, при чем, при поступлении n=0 накопленное значение вектора обнуляют, т.е.  В сумматоре накопителе 8 вычисляют
В сумматоре накопителе 8 вычисляют  а при поступлении с выхода счетчика 9 на второй вход сумматора накопителя 8 номера n=N-2 текущее накопленное значение вектора
а при поступлении с выхода счетчика 9 на второй вход сумматора накопителя 8 номера n=N-2 текущее накопленное значение вектора  подают на выход вычислителя фазы 10, в котором получают значение фазы
подают на выход вычислителя фазы 10, в котором получают значение фазы  Полученное значение фазы ψ подают на вход умножителя на коэффициент 11, в котором умножают на коэффициент 1/(4πТсимв)=Fсимв/(4π), где Тсимв - длительность символа, Fсимв - частота следования символов, в результате на выходе получают значение доплеровского сдвига частоты.
Полученное значение фазы ψ подают на вход умножителя на коэффициент 11, в котором умножают на коэффициент 1/(4πТсимв)=Fсимв/(4π), где Тсимв - длительность символа, Fсимв - частота следования символов, в результате на выходе получают значение доплеровского сдвига частоты.
Предлагаемый способ обеспечивает определение доплеровского смещения частоты по информационному (т.е. неизвестному) фазоманипулированному сигналу с абсолютной, относительной или фазоразностной фазовой манипуляцией.
По сравнению с прототипом предлагаемый способ требует значительно меньшее количество вычислительных операций, т.к. все операции умножения и сложения производятся с отдельными значениями, а в прототипе с векторами отсчетов входного сигнала и сигналов гетеродинов. Кроме того, в заявляемом способе точность получаемой оценки доплеровского смещения частоты выше и практически не зависит от выбранной частоты дискретизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ФАЗОВОГО СДВИГА ПРОЗРАЧНОГО ОПТИЧЕСКИ АНИЗОТРОПНОГО ОБРАЗЦА | 2000 |
|
RU2184365C2 |
| СПОСОБ ДИСКРЕТНОГО ЗАДАНИЯ ФАЗОВОГО СДВИГА МЕЖДУ ДВУМЯ МОНОХРОМАТИЧЕСКИМИ ГАРМОНИЧЕСКИМИ ИЗНАЧАЛЬНО СИНХРОННЫМИ СИГНАЛАМИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2534929C2 |
| СПОСОБ АДАПТИВНОГО ВЫБОРА ОПТИМАЛЬНОГО ПАРАМЕТРА АЛГОРИТМА КОРРЕКЦИИ НА ОСНОВЕ РАЗБРОСА ФАЗ КОРРЕКТИРУЕМОГО СИГНАЛА | 2018 |
|
RU2693286C1 |
| ЦИФРОВОЙ ДЕМОДУЛЯТОР СИГНАЛОВ С МНОГОПОЗИЦИОННОЙ ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2021 |
|
RU2776968C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ОПРЕДЕЛЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ | 2003 |
|
RU2236694C1 |
| УСТРОЙСТВО ПРИЕМА И ПЕРЕДАЧИ ФАЗОМАНИПУЛИРОВАННЫХ КОДОВЫХ СИГНАЛОВ | 2002 |
|
RU2236086C2 |
| УСТРОЙСТВО КОМПЕНСАЦИИ НЕСТАБИЛЬНОСТИ НЕСУЩЕЙ ЧАСТОТЫ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2006 |
|
RU2336650C2 |
| Автокорреляционный демодулятор псевдослучайных сигналов с относительной фазовой модуляцией второго порядка | 2017 |
|
RU2660594C1 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2168869C1 |
Изобретение относится к области электрорадиотехники, а именно к технике радиосвязи, и может быть использовано в системах одночастотной передачи данных, а также в системах радиозондирования для измерения доплеровского смещения несущей частоты сигнала в информационно-измерительных устройствах без априорной информации о модулирующем сообщении. Техническим результатом является определение доплеровского смещения частоты по информационному (т.е. неизвестному) фазоманипулированному сигналу с абсолютной, относительной или фазоразностной фазовой манипуляцией. Для этого принимают информационный фазоманипулированный сигнал, соответствующий N символам, оценивают значения фаз Ф1, Ф2, Ф3 каждых трех соседних символов, вычисляют разности фаз ΔФ1=Ф3-2⋅Ф2+Ф1 и ΔФ2=Ф3-Ф1, преобразовывают полученные разности фаз ΔФ'1=atan2(sin(ΔФ1), cos(ΔФ1)) и ΔФ'2=atan2(sin(ΔФ2), cos(ΔФ2)), вычисляют разность преобразованных разностей фаз ΔΨ=ΔФ'2-ΔФ'1, после чего вычисляют экспоненту, получая значение ехр(i⋅ΔΨ), суммируют с накоплением получаемые N-2 значения экспонент  после чего вычисляют фазу суммарного накопленного вектора
после чего вычисляют фазу суммарного накопленного вектора  получая значение фазы ψ, которое умножают на коэффициент 1/(4πTсимв)=Fсимв/(4π), где Tсимв - длительность символа, Fсимв - частота следования символов, в результате получая значение доплеровского сдвига частоты. 1 ил.
получая значение фазы ψ, которое умножают на коэффициент 1/(4πTсимв)=Fсимв/(4π), где Tсимв - длительность символа, Fсимв - частота следования символов, в результате получая значение доплеровского сдвига частоты. 1 ил.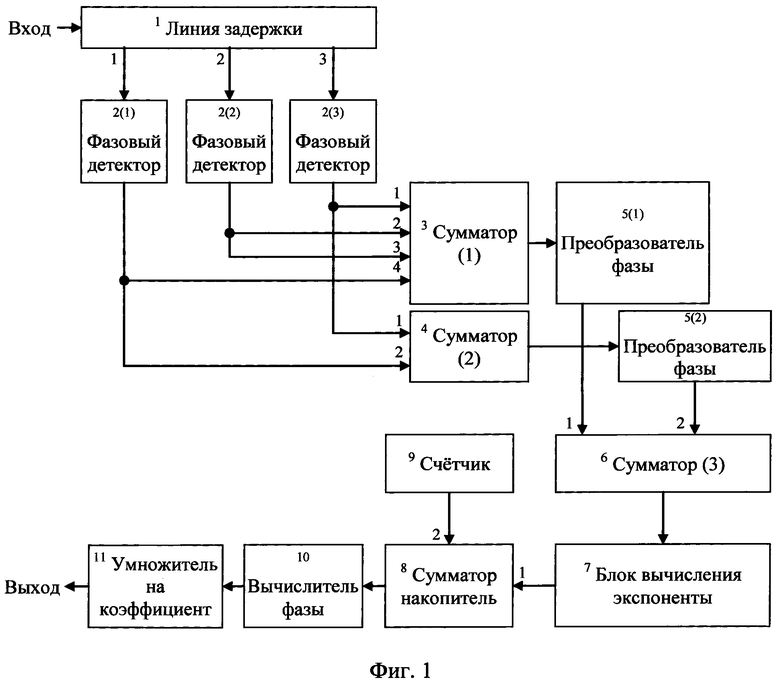
Способ определения доплеровского сдвига частоты по информационному фазоманипулированному сигналу на основе анализа фазового отклонения 2 порядка, состоящий в том, что принимают информационный фазоманипулированный сигнал, соответствующий N символам, оценивают значения фаз Ф1, Ф2, Ф3 каждых трех соседних символов, вычисляют разности фаз ΔФ1=Ф3-2⋅Ф2+Ф1 и ΔФ2=Ф3-Ф1, преобразовывают полученные разности фаз  и
и  вычисляют разность преобразованных разностей фаз
вычисляют разность преобразованных разностей фаз  после чего вычисляют экспоненту, получая значение ехр(i⋅ΔΨ), суммируют с накоплением получаемые N-2 значения экспонент
после чего вычисляют экспоненту, получая значение ехр(i⋅ΔΨ), суммируют с накоплением получаемые N-2 значения экспонент  при этом при n=0 значение вектора обнуляют, т.е.
при этом при n=0 значение вектора обнуляют, т.е.  после чего вычисляют
после чего вычисляют  а при n=N-2 вычисляют фазу суммарного накопленного вектора
а при n=N-2 вычисляют фазу суммарного накопленного вектора  получая значение фазы
получая значение фазы  которое умножают на коэффициент 1/(4πТсимв)=Fсимв/(4π), где Тсимв - длительность символа, Fсимв - частота следования символов, в результате получая значение доплеровского сдвига частоты.
которое умножают на коэффициент 1/(4πТсимв)=Fсимв/(4π), где Тсимв - длительность символа, Fсимв - частота следования символов, в результате получая значение доплеровского сдвига частоты.
| US 4706286 A1, 10.11.1987 | |||
| СПОСОБ ОДНОВРЕМЕННОГО ИЗМЕРЕНИЯ ЧАСТОТНЫХ ЗАВИСИМОСТЕЙ ДОПЛЕРОВСКОГО СМЕЩЕНИЯ ЧАСТОТЫ И ВРЕМЕНИ РАСПРОСТРАНЕНИЯ КОРОТКОВОЛНОВЫХ СИГНАЛОВ В ИОНОСФЕРНОЙ РАДИОЛИНИИ | 2006 |
|
RU2316898C1 |
| ОПРЕДЕЛЕНИЕ СДВИГОВ ЧАСТОТЫ В СИСТЕМАХ СВЯЗИ | 1997 |
|
RU2195772C2 |
| 0 |
|
SU161949A1 | |
| Устройство для вальцовки обечаек | 1976 |
|
SU656698A1 |

