Изобретение относится к радиотехнике и предназначено для использования при когерентной демодуляции сигналов с многопозиционной фазовой манипуляцией (ФМ).
Известно устройство восстановления несущей для систем связи с ФМ-4 [1], состоящее из двух балансных смесителей, у которых сигнальные входы объединены и являются входом устройства, подстраиваемого генератора  , фазового детектора (ФД), генератора частоты Ω/2π, балансного амплитудного модулятора, двух полосовых фильтров, один из которых настроен на частоту
, фазового детектора (ФД), генератора частоты Ω/2π, балансного амплитудного модулятора, двух полосовых фильтров, один из которых настроен на частоту

а другой - на частоту

двух усилителей промежуточной частоты (УПЧ), настроенных на частоту Ω/2π, двух удвоителей частоты, двух фазовращателей - один на +45°, а другой на -45°.
Недостатком этого устройства являются его высокие энергетические потери, которые показывают, на сколько нужно увеличить отношение сигнал/шум (C/N), то есть увеличить мощность передатчика, чтобы получить потенциально возможную вероятность битовой ошибки.
Из структуры устройства [1] видно, что восстановление несущей выполнено с помощью контура фазовой автоподстройки частоты (ФАПЧ), от качества работы которого зависят энергетические потери. В этом устройстве последствия манипуляции, при определении рассогласования по фазе между несущей и восстановленным колебанием, устраняются удвоителями частоты двух ветвей с последующим их фазовым детектированием. Удвоение частоты производится схемой возведения сигнала в квадрат. При низких отношениях C/N в результате возведения сигнала в квадрат, это отношение ухудшается (см., например, [2] абзац 10.2.1.4, стр.635). Фазовый детектор осуществляет перемножение сигналов с выходов удвоителей частоты, то есть сигналов с более низким отношением сигнал/шум, чем на входе устройства, тем самым еще в большей степени уменьшая это отношение в контуре ФАПЧ и увеличивая дисперсию фазы  восстановленного колебания.
восстановленного колебания.
Снижение дисперсии фазы возможно за счет уменьшения шумовой полосы ФАПЧ, что в некоторой степени может уменьшить энергетические потери, если не привести к противоположному результату, когда возрастет дисперсия фазы, вызванная не скомпенсированной паразитной фазовой модуляцией (ПФМ). Уровень ее определяется фазовым шумом гетеродинов передатчика и приемника, а также паразитными гармоническими составляющими, находящимися в их спектре. ПФМ может внести значительный вклад в общие энергетические потери, которые могут стать невосполнимыми (см., например, [2] абзац, 10.2.1.8, стр.641, 642).
Энергетические потери также связаны с применением в устройстве [1] подстраиваемого генератора, который входит в контур ФАПЧ, и, как правило, обладает низкой стабильностью и повышенной ПФМ по сравнению со стабилизированным генератором, работающим на фиксированной частоте.
Энергетические потери устройства [1] также связаны со статической ошибкой сопровождения фазы, которая определяется уходом нуля ФД. Уход нуля ФД, в свою очередь, связан с не идентичностью фазовых характеристик полосовых фильтров и УПЧ. Выдержать их идентичность в интервале рабочих температур практически невозможно. К недостаткам этого устройства следует отнести и наличие операции настройки фильтров, от точности которой зависит статическая ошибка сопровождения фазы.
Известно также устройство восстановления несущей частоты фазоманипулированных сигналов [3], содержащее первый и второй ФД, первые входы которых объединены и являются входом устройства, два фильтра нижних частот, четыре компаратора, два перемножителя, первый и второй вычитатели, фильтр, причем выход первого вычитателя соединен с входом фильтра, управляемый генератор, фазовращатель, выход которого соединен со вторым входом второго ФД, три сумматора, два аттенюатора, инвертор.
Недостатком устройства [3] являются его высокие энергетические потери, связанные с восстановлением несущей при помощи контура ФАПЧ. В контуре ФАПЧ устройства применена синфазно-квадратурная схема (разновидность схемы Костаса). Производительность такой схемы эквивалентна схеме возведения сигнала в квадрат (см., например, [2] абзац 10.2.1.5, стр.637). Недостаток применения в устройстве [3] управляемого генератора аналогичен недостатку применения подстраиваемого генератора в устройстве [1].
Устройство [3] предпочтительнее устройству [1], так как значительная часть операций над сигналом может быть выполнена путем цифровой обработки сигнала с более высокой точностью.
Наиболее близким к заявляемому устройству, принятым за прототип, является устройство восстановления несущей в М-позиционной системе ФМ [4], содержащее первый и второй перемножители, первый и второй интеграторы со сбросом, петлевой фильтр, фазовращатель, причем первые входы первого и второго перемножителей объединены и являются входом устройства, выход фазовращателя соединен со вторым входом первого перемножителя, а второй вход второго перемножителя объединен с входом фазовращателя, устройство также содержит генератор управляемый напряжением (ГУН), первый и второй элементы задержки на длительность Т, первый и второй стробирующие устройства, оцениватель фазы, вычислитель косинуса и вычислитель синуса, третий и четвертый перемножители, сумматор.
Недостатком устройства [4] являются его энергетические потери, связанные с восстановлением несущей при помощи контура ФАПЧ. В его контуре ФАПЧ, также как и в устройстве [3], применена синфазно-квадратурная схема (разновидность схемы Костаса), включающая два перемножителя, на входы которых подаются сигналы, содержащие шумовые компоненты. Следует подчеркнуть, что оцениватель фазы не уменьшает входную дисперсию фазы, действующую в согласованной полосе сигнала, а только выделяет ее. Недостаток применения в устройстве [4] ГУН аналогичен недостатку применения подстраиваемого генератора в устройстве [1].
Предлагаемое изобретение направлено на решение задачи снижения энергетических потерь при когерентной демодуляции сигналов с многопозиционной ФМ.
Достижение технического результата устройства компенсации нестабильности несущей частоты фазоманипулированных сигналов определяется совокупностью следующих существенных признаков:
- наличие, также как и в прототипе, первого и второго перемножителей, первого и второго интеграторов со сбросом, петлевого фильтра, фазовращателя, причем первые входы первого и второго перемножителей объединены и являются входом устройства, выход фазовращателя соединен со вторым входом первого перемножителя, а второй вход второго перемножителя объединен с входом фазовращателя;
- наличие, в отличие от прототипа, первого и второго аналого-цифровых преобразователей (АЦП), опорного генератора, синтезатора частоты, вычислителя двойного арктангенса, первого и второго умножителей-делителей, первого и второго блоков вычитания, синтезатора фазы, причем выход опорного генератора соединен с входом синтезатора частоты, выход которого соединен с объединенными вторым входом второго перемножителя и входом фазовращателя. Выходы первого и второго перемножителей соединены с входами соответственно первого и второго АЦП, выходы которых соединены с входами соответственно первого и второго интеграторов со сбросом, выходы первого и второго интеграторов со сбросом соединены соответственно с первым и вторым входами вычислителя двойного арктангенса, выход которого соединен с входом первого умножителя-делителя и с первым входом второго блока вычитания. Выход первого умножителя-делителя соединен с первым входом первого блока вычитания, выход первого блока вычитания соединен с входом петлевого фильтра, выход которого соединен с входом синтезатора фазы, при этом выход синтезатора фазы соединен с входом второго умножителя-делителя и вторым входом второго блока вычитания, выход которого является выходом устройства. Выход второго умножителя-делителя соединен со вторым входом первого блока вычитания, вторые входы первого и второго умножителей-делителей объединены и являются управляющим входом устройства.
Первый и второй перемножители, фазовращатель, также как и в прототипе, образуют квадратурный преобразователь, который переносит спектр сигнала с промежуточной частоты или несущей вниз, на сигнальную плоскость.
Опорный генератор и синтезатор частоты, в отличие от ГУН прототипа, образуют стабилизированный генератор, работающий на фиксированной, номинальной частоте приема и который является гетеродином для квадратурного преобразователя.
Первый и второй АЦП квантуют сигнал по амплитуде и времени.
Первый и второй интеграторы со сбросом, также как и в прототипе, производят согласованную фильтрацию и оценку квадратурных составляющих сигнала на интервале Т (длительности символа).
Вычислитель двойного арктангенса по оцененным квадратурным составляющим сигнала оценивает фазу вектора сигнала на всей сигнальной плоскости, без снятия манипуляции. Вычислитель двойного арктангенса выполняется на основе постоянного запоминающего устройства (ПЗУ), адресом которого являются цифровые синфазный и квадратурный отсчеты сигнала.
Первый умножитель-делитель снимает фазовую манипуляцию сигнала на выходе вычислителя двойного арктангенса, как будет показано далее, без увеличения дисперсии фазы сигнала.
Второй умножитель-делитель, первый блок вычитания, петлевой фильтр, синтезатор фазы образуют контур фазовой автоподстройки (ФАЛ), отслеживающий вращение фазы вектора сигнала, вызванное нестабильностью несущей частоты, а также ПФМ гетеродинов. Первый блок вычитания выполняет функцию линейного фазового детектора.
Второй блок вычитания компенсирует вращение фазы вектора сигнала на выходе вычислителя двойного арктангенса, так как при работе ФАП на выходе синтезатора фазы образуется отфильтрованная, восстановленная, без манипуляции, вращаемая фаза вектора сигнала. В результате чего, на выходе второго блока вычитания образуется не вращаемая фаза вектора сигнала, обусловленная манипуляцией информационными символами и дисперсией, вызванной не скомпенсированной ПФМ и шумом.
Таким образом, технический результат - снижение энергетических потерь достигается путем компенсации вращения фазы вектора сигнала, вызванного нестабильностью несущей частоты, без применения управляемого генератора, в цифровой форме линейными элементами, которые не увеличивают дисперсию фазы сигнала. Снижение энергетических потерь, как следствие, позволяет увеличить шумовую полосу ФАП, тем самым уменьшить время вхождения в синхронизм и снизить требования к ПФМ аналоговой части устройства.
Для пояснения работы устройства компенсации нестабильности несущей частоты фазоманипулированных сигналов приводятся следующие чертежи:
- фиг.1 - структурная схема устройства компенсации нестабильности несущей частоты ФМ сигналов;
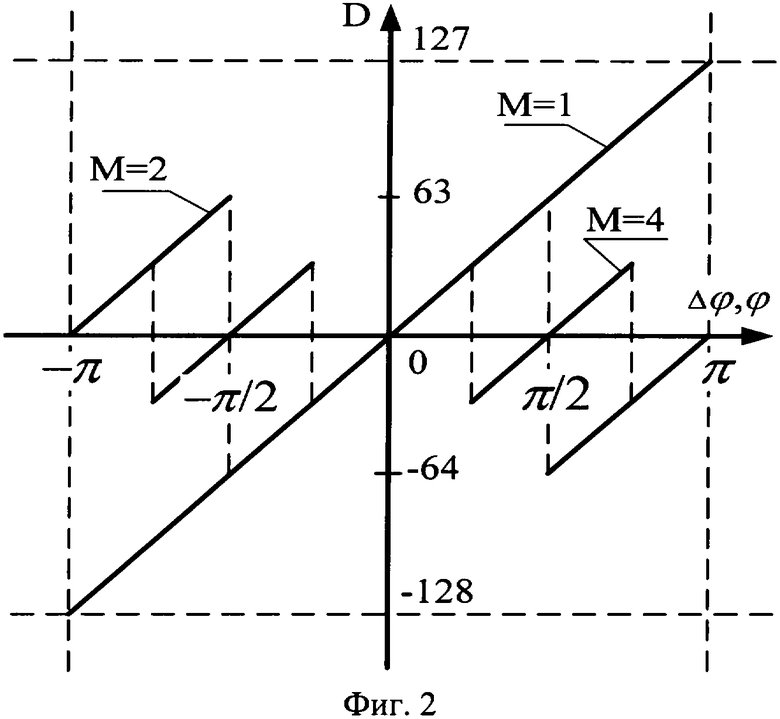
- фиг.2 - график функции двойного арктангенса и дискриминационные характеристики ФД;
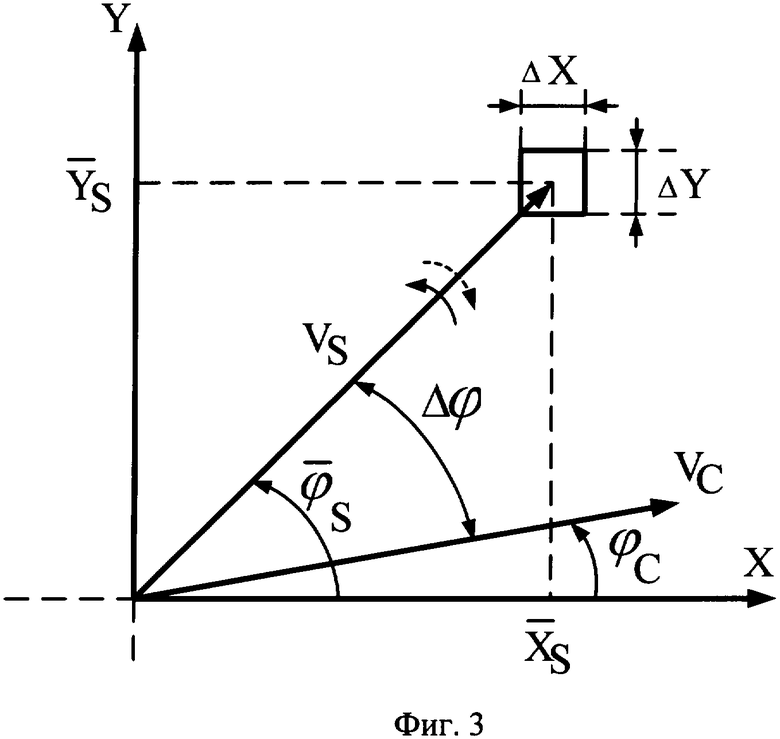
- фиг.3 - графическое изображение участка сигнальной плоскости сигнала ФМ-4.
Устройство компенсации нестабильности несущей частоты фазоманипулированных сигналов (фиг.1) содержит первый и второй перемножители 1 и 2, фазовращатель 3, первый и второй АЦП 4 и 5, синтезатор частоты 6, первый и второй интеграторы со сбросом 7 и 8, опорный генератор 9, вычислитель двойного арктангенса 10, первый и второй умножители-делители 11 и 12, первый и второй блоки вычитания 13 и 14, петлевой фильтр 15, синтезатор фазы 16.
Первые входы первого и второго перемножителей 1 и 2 объединены и являются входом устройства, выход фазовращателя 3 соединен со вторым входом первого перемножителя 1, а второй вход второго перемножителя 2 объединен с входом фазовращателя 3, выход опорного генератора 9 соединен с входом синтезатора частоты 6, выход которого соединен с объединенными вторым входом второго перемножителя 2 и входом фазовращателя 3, выходы первого и второго перемножителей 1 и 2 соединены с входами соответственно первого и второго АЦП 4 и 5, выходы которых соединены с входами соответственно первого и второго интеграторов со сбросом 7 и 8, выходы первого и второго интеграторов со сбросом 7 и 8 соединены соответственно с первым и вторым входами вычислителя двойного арктангенса 10, выход которого соединен с входом первого умножителя-делителя 11 и с первым входом второго блока вычитания 14, выход первого умножителя-делителя 11 соединен с первым входом первого блока вычитания 13, выход первого блока вычитания 13 соединен с входом петлевого фильтра 15, выход которого соединен с входом синтезатора фазы 16, выход синтезатора фазы 16 соединен с входом второго умножителя-делителя 12 и вторым входом второго блока вычитания 14, выход которого является выходом устройства, выход второго умножителя-делителя 12 соединен со вторым входом первого блока вычитания 13, вторые входы первого и второго умножителей-делителей 11 и 12 объединены и являются управляющим входом устройства. Для пояснения работы устройства на структурной схеме (см. фиг.1) дополнительно показаны тактовые входы первого и второго АЦП 4 и 5, первого и второго интеграторов со сбросом 7 и 8, синтезатора фазы 16.
Устройство работает следующим образом.
Первый и второй перемножители 1 и 2 совместно с фазовращателем 3 на 90° образуют квадратурный преобразователь, который переносит спектр сигнала с промежуточной частоты или несущей вниз, на сигнальную плоскость. Опорным сигналом для квадратурного преобразователя является выходной сигнал синтезатора частоты 6, который работает на фиксированной, номинальной частоте принимаемого сигнала. В свою очередь, синтезатор частоты 6 работает от высокостабильного, спектрально чистого опорного генератора 9.
Первый и второй АЦП 4 и 5 квантуют сигнал по амплитуде и времени и работают на повышенной частоте kFs, кратной выделенной тактовой частоте Fs.
Первый и второй интеграторы со сбросом 7 и 8 производят согласованную фильтрацию и дают оценку квадратурных составляющих сигнала  на интервале Т (длительности символа). Интеграторы стробируются повышенной тактовой частотой kFs. Остальные цифровые элементы устройства стробируются тактовой частотой Fs.
на интервале Т (длительности символа). Интеграторы стробируются повышенной тактовой частотой kFs. Остальные цифровые элементы устройства стробируются тактовой частотой Fs.
Вычислитель двойного арктангенса 10, функции ATAN2 (), по оцененным квадратурным составляющим сигнала дает оценку фазы  манипулированного сигнала на всей сигнальной плоскости X, Y от минус π до π. Эта оценка не снимает манипуляцию фазы. Вычисление функции ATAN2 () производится с помощью запрограммированного ПЗУ. Эта функция линейна на всем интервале значений фазы сигнала. График функции двойного арктангенса D(ϕ), при восьмиразрядном выходе для М=1, приведен на фиг.2. Точность оценки фазы сигнала зависит от уровня его квантования по амплитуде, разрядности АЦП, а также от входной и выходной разрядности ПЗУ. Оцененные значения в цифровом виде являются адресом ПЗУ. То есть вся сигнальная плоскость (см. фиг.3) разбита на 2R (где R - разрядность адреса ПЗУ) элементарных квадратов ΔX*ΔY. Каждому элементарному квадрату соответствует рассчитанное значение фазы, которое, в свою очередь, тоже квантуется.
манипулированного сигнала на всей сигнальной плоскости X, Y от минус π до π. Эта оценка не снимает манипуляцию фазы. Вычисление функции ATAN2 () производится с помощью запрограммированного ПЗУ. Эта функция линейна на всем интервале значений фазы сигнала. График функции двойного арктангенса D(ϕ), при восьмиразрядном выходе для М=1, приведен на фиг.2. Точность оценки фазы сигнала зависит от уровня его квантования по амплитуде, разрядности АЦП, а также от входной и выходной разрядности ПЗУ. Оцененные значения в цифровом виде являются адресом ПЗУ. То есть вся сигнальная плоскость (см. фиг.3) разбита на 2R (где R - разрядность адреса ПЗУ) элементарных квадратов ΔX*ΔY. Каждому элементарному квадрату соответствует рассчитанное значение фазы, которое, в свою очередь, тоже квантуется.
Фаза сигнала на выходе вычислителя двойного арктангенса 10 представляется как:

где Ω0 - угловая частота расстройки несущей приемника и передатчика (с учетом доплеровского сдвига), подлежащая компенсации;
ϕP(nT) - динамическая составляющая отклонения фазы несущих частот приемника и передатчика, вызванная ПФМ, подлежащая компенсации;
 - составляющая, обусловленная манипуляцией фазы сигнала передатчика информационными символами, d может принимать значения от 0 до М-1;
- составляющая, обусловленная манипуляцией фазы сигнала передатчика информационными символами, d может принимать значения от 0 до М-1;
ϕN(nT) - динамическая составляющая отклонения фазы сигнала, вызванная аддитивным, белым, гауссовским шумом (АБГШ);
ϕK(nT) - динамическая составляющая отклонения фазы сигнала, вызванная ошибкой (шумом) квантования.
Угловая частота расстройки несущей приемника и передатчика Ω0 (с учетом доплеровского сдвига) может быть как положительная, так и отрицательная, то есть вектор сигнала Vs на сигнальной плоскости (см. фиг.3) может вращаться как по часовой стрелке (отрицательная расстройка), так и против часовой (положительная расстройка). Динамическая составляющая отклонения фазы сигнала, вызванная ошибкой квантования тем меньше, чем выше разрядность первого и второго АЦП 4 и 5, а также вычислителя двойного арктангенса 10.
Первый умножитель-делитель 11 снимает фазовую манипуляцию сигнала. Операция умножения фазы сигнала на М, без учета переполнения, снимает фазовую манипуляцию, а операция деления на М приводит к одной и той же фазовой крутизне сигнала, которая не зависит от индекса модуляции.
Фаза сигнала на выходе первого умножителя-делителя 11 будет определяться формулой:

где М - индекс ФМ;
 - оцененная фаза сигнала на выходе вычислителя двойного арктангенса 10;
- оцененная фаза сигнала на выходе вычислителя двойного арктангенса 10;
k - коэффициент переполнения.
Для примера: сигнал ФМ-4 может иметь четыре положения фазы: 45°, 135°, 225° и 375°, которые после расчета по формуле (2) становятся равными 45°. Для цифрового сигнала в двоичной форме операция умножения-деления заменяется обнулением (исключением) старших разрядов на выходе вычислителя двойного арктангенса 10. Количество обнуляемых разрядов определяется двоичным логарифмом М - индекса ФМ. Для модуляции ФМ-2 обнуляется один старший разряд, после чего на выходе первого умножителя-делителя 11 образуется функция арктангенса, а для ФМ-4 функция арктангенса двойного угла. Для немодулированного сигнала при М=1 старшие разряды не обнуляются. Графики этих функций D(ϕ) для М=1, М=2 и М=4 приведены на фиг.2.
Синтезатор фазы 16 является неотъемлемой частью синтезаторов отчетов или синтезаторов прямого синтеза. В данном случае восстанавливать отчеты не требуется. В качестве синтезатора фазы 16 используется цифровой интегратор или накапливающий сумматор. Синтезатор фазы 16 имеет возможность получения на его выходе как нарастающей (положительная производная), так и убывающей (отрицательная производная) фазы, зависящей от знака на его входе. Периодичность или мгновенная частота повторения фазы на его выходе определяется формулой:

где ϕC(nT) - текущее значение фазы;
ϕC(nT-Т) - задержанное значение фазы;
Т - период квантования.
На входе синтезатора фазы 16 задается производная фазы или частота. При отрицательной входной производной, на выходе синтезатора его фаза будет убывающей. При ограниченной разрядности периодичность или частота повторения фазы определяется формулой:
где К - децимальное значение цифрового входного сигнала (как положительное, так и отрицательное);
N - разрядность синтезатора.
Из формулы (4) видно, что синтезатор фазы 16 может формировать только дискретные значения частот с шагом, равным наименьшему значению частоты при К=1. При входном сигнале, равном нулю, фаза на выходе синтезатора не меняется и имеет случайное (последнее) значение. Указанный синтезатор используется в контуре ФАП для отслеживания вращения вектора сигнала, вызванного расстройкой несущей частоты приемника и передатчика с учетом доплеровского сдвига.
В контур ФАП также входит первый блок вычитания 13, петлевой фильтр 15 и второй умножитель-делитель 12. Первый блок вычитания 13 выполняет функцию фазового детектора, который сравнивает фазу вектора сигнала со снятой манипуляцией с фазой синтезатора фазы 16, при этом на выходе ФД образуется разность фаз Δϕ (см. фиг.3). На фиг.3 показан условный вектор Vc синтезатора фазы 16. Замкнутый контур ФАП будет стремиться свести разность фаз А Δϕ→0 и поддерживать это состояние. Фазовый детектор является линейным устройством, которое не увеличивает дисперсию фазы сигнала. Дискриминационные характеристики фазового детектора D (Δϕ) приведены на фиг.2. Петлевой фильтр 15 определяет порядок контура ФАП.
Второй умножитель-делитель 12 обнуляет (исключает) старшие разряды синтезатора фазы 16 из процесса слежения, то есть делает фазу синтезатора фазы 16 эквивалентной фазе сигнала со снятой манипуляцией. Периодичность фазы на выходе второго умножителя-делителя 12 увеличивается в М раз. Общая же периодичность фазы на выходе синтезатора фазы 16 в режиме слежения, с учетом старших разрядов, будет соответствовать f= Ωo/2π частоте расстройки несущей приемника и передатчика.
Неоднозначность фазы на выходе синтезатора фазы 16, относительно переданной, будет кратна 2π/M.
Второй блок вычитания 14 является компенсатором вращения фазы вектора сигнала, на первый вход которого подается оцененное вычислителем двойного арктангенса 10 значение фазы сигнала, а на второй - отфильтрованное, восстановленное контуром ФАП, немодулированное значение фазы сигнала. На выходе второго блока вычитания 14 образуется не вращаемая фаза вектора сигнала, которая определяется формулой:

где  - составляющая, обусловленная манипуляцией фазы сигнала передатчика информационными символами, где d может принимать значения от 0 до М-1;
- составляющая, обусловленная манипуляцией фазы сигнала передатчика информационными символами, где d может принимать значения от 0 до М-1;
ϕPH(nT) - не скомпенсированная, динамическая составляющая отклонения фазы несущих частот приемника и передатчика, вызванная ПФМ;
ϕN(nT) - динамическая составляющая отклонения фазы сигнала, вызванная АБГШ;
ϕK(nT) - динамическая составляющая отклонения фазы сигнала, вызванная ошибкой (шумом) квантования;
 - фазовая неоднозначность, где m может принимать значения от 0 до М-1.
- фазовая неоднозначность, где m может принимать значения от 0 до М-1.
Первая составляющая фазы обусловлена передаваемой информацией, которую необходимо выделить.
Вторая составляющая фазы определяется качеством гетеродинов приемника и передатчика, их суммарной ПФМ и возможностью ее компенсации контуром ФАП предлагаемого устройства. Так как контур ФАП работает автономно, то имеется большая возможность компенсации ПФМ, по сравнению с прототипом, путем установки оптимальной шумовой полосы, вследствие чего, в конкретных случаях, могут быть снижены требования к ПФМ аналоговой части.
Составляющая отклонения фазы вектора сигнала, вызванная АБГШ, определяется достаточной шумовой полосой Fшд ФАП. Дисперсия фазы сигнала  , вызванная аддитивным шумом, также определяет энергетические потери. Дисперсия фазы сигнала на входе устройства обратно пропорциональна отношению C/N, а дисперсия фазы на выходе контура ФАП определяется его шумовой полосой, которая прямо пропорциональна отношению односторонней шумовой полосы контура ФАП к односторонней шумовой полосе согласованного фильтра или односторонней эффективной ширине спектра сигнала. Дисперсия фазы восстановленной несущей при воздействии АБГШ и при отсутствии ПФМ определяется формулой:
, вызванная аддитивным шумом, также определяет энергетические потери. Дисперсия фазы сигнала на входе устройства обратно пропорциональна отношению C/N, а дисперсия фазы на выходе контура ФАП определяется его шумовой полосой, которая прямо пропорциональна отношению односторонней шумовой полосы контура ФАП к односторонней шумовой полосе согласованного фильтра или односторонней эффективной ширине спектра сигнала. Дисперсия фазы восстановленной несущей при воздействии АБГШ и при отсутствии ПФМ определяется формулой:
где N - мощность шума на входе в согласованной полосе;
С - мощность сигнала (несущей) на входе;
BL - односторонняя шумовая полоса контура ФАПЧ;
WS - односторонняя эффективная ширина спектра сигнала.
Используя формулу (6) и задав среднеквадратическое отклонение (СКО) фазы σφ и отношение C/N, рассчитывается достаточная шумовая полоса Fшд контура ФАП. Например: СКО фазы σφ, равное 0,1 радиана, практически не вносит дополнительных энергетических потерь для ФМ-2, и при C/N=1 достаточная шумовая полоса Fшд составит одну сотую от односторонней эффективной ширины спектра сигнала.
Динамическая составляющая отклонения фазы вектора сигнала, вызванная ошибкой квантования, зависит от разрядности устройства и при шести, семи разрядных АЦП ее среднеквадратическое значение составляет не более 0,01 радиана.
Дополнительные энергетические потери предлагаемого устройства возникают за счет квантования по времени. Эти потери возникают за счет того, что фаза входного сигнала на интервале длительности символа поворачивается на некоторый угол, в результате чего возникает интерференция между квадратурными составляющими сигнала  и
и  . При повороте фазы входного сигнала ФМ-2 на 18° дополнительные энергетические потери составляют не более 0,1 дБ. Исходя из допустимости таких потерь максимальная расстройка по частоте fmax между приемником и передатчиком должна быть не более
. При повороте фазы входного сигнала ФМ-2 на 18° дополнительные энергетические потери составляют не более 0,1 дБ. Исходя из допустимости таких потерь максимальная расстройка по частоте fmax между приемником и передатчиком должна быть не более  .
.
Выходной сигнал второго блока вычитания 14 является выходным сигналом устройства, по которому в дальнейшем принимается решение о передаваемых символах.
Фазовая неоднозначность устройства аналогична аналогам и прототипу.
Путем установки максимально возможной полосы ФАП, вхождение в синхронизм может производиться за несколько десятков символов.
Квадратурный преобразователь, синтезатор частоты, опорный генератор, АЦП выпускаются серийно промышленностью. Цифровая часть устройства компенсации нестабильности несущей частоты фазоманипулированных сигналов может, например, являться составной частью устройств цифровой обработки сигналов, выполненных на основе программируемых логических интегральных схем (ПЛИС), базовых матричных кристаллах (БМК) или сигнальных процессоров.
Реально достижимые экспериментальные результаты, а именно энергетические потери, вносимые предложенным устройством, оценивались путем сравнения помехоустойчивости устройства без компенсации нестабильности несущей на нулевой частоте с помехоустойчивостью того же устройства с компенсацией. Для этого, в том и другом случае, снимались графики зависимости вероятности битовой ошибки от отношения энергии бита к спектральной плотности мощности шума Eb/No в интервале от минус 3 дБ до плюс 13 дБ в режимах ФМ-2 и ФМ-4.
В первом случае (без компенсации) сумма сигнала и шума АБГШ подавалась на вход первого АЦП 4, а вероятность битовой ошибки оценивалась на выходе первого интегратора со сбросом 7. В этом случае график помехоустойчивости эквивалентен когерентному приему сигналов ФМ-2 и ФМ-4.
Во втором случае (с компенсацией), в режиме ФМ-2 один и тот же сигнал суммировался с сигналами разных, независимых источников шума АБГШ и подавался на вход первого и второго АЦП 4 и 5. В режиме ФМ-4 разные сигналы суммировались с разными сигналами источников шума. В этом случае, в режимах ФМ-2 и ФМ-4, вероятность битовой ошибки оценивалась на выходе компенсатора с применением решающего устройства.
Устройство компенсации имело следующие характеристики:
Уровни входных сигналов (пик/пик) составляли 0,4 от раскрыва АЦП.
В результате проведения эксперимента, графики зависимости вероятности битовой ошибки от отношения энергии бита к спектральной плотности мощности шума Eb/No, в режимах ФМ-2 и ФМ-4 с применением компенсации, в интервале от 0 дБ до плюс 13 дБ полностью совпали с графиком, где компенсация не использовалась. Энергетические потери при отношении Eb/No, равном минус 3 дБ, составили 0,5 дБ. При отсутствии внешнего шума АБГШ, на выходе ФД оценивалось среднеквадратическое отклонение фазы, вызванное аппаратными шумами и шумом квантования, которое составило не более 0,01 радиана.
Таким образом, устройство компенсации нестабильности несущей частоты фазоманипулированных сигналов практически не вносит энергетических потерь, имеющих место в прототипе, при когерентной демодуляции ФМ сигналов, а также позволяет уменьшить время вхождения в синхронизм и снизить требования к аналоговой части устройства.
Источники информации
1. Заявка RU №97101981, опубл. 27.02.1999 г.
2. Скляр Б. Цифровая связь, Москва "Санкт-Петербург" Киев, 2003.
3. Патент RU №2044409, опубл. 20.09.1995 г.
4. Прокис Дж. Цифровая связь, Москва, Радио и связь, 2000, стр.296, рис.6.2.10 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| ДЕМОДУЛЯТОР СИСТЕМЫ СВЯЗИ С ДВУХКРАТНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2009 |
|
RU2427969C1 |
| Устройство контроля качества канала связи | 1990 |
|
SU1823138A1 |
| УСТРОЙСТВО ЦИФРОВОЙ КОГЕРЕНТНОЙ ОБРАБОТКИ СИГНАЛОВ | 1990 |
|
SU1818989A1 |
| Устройство для корреляционного приема фазоманипулированных сигналов с подстройкой частоты | 1984 |
|
SU1221762A1 |
| ИЗМЕРИТЕЛЬ РАЗНОСТИ ФАЗ РАДИОСИГНАЛОВ | 2009 |
|
RU2388001C1 |
| Приемник фазоманипулированных сигналов с одной боковой полосой | 1982 |
|
SU1172061A1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ ФАЗОМАНИПУЛИРОВАННОГО СИГНАЛА И СЛЕЖЕНИЯ ЗА НЕЙ | 2012 |
|
RU2510145C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ СИГНАЛОВ С АМПЛИТУДНО-ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2002 |
|
RU2234816C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ВИДОВ МАНИПУЛЯЦИИ ЦИФРОВЫХ СИГНАЛОВ | 2005 |
|
RU2309414C2 |
Изобретение относится к радиотехнике и предназначено для использования при когерентной демодуляции сигналов с многопозиционной фазовой манипуляцией. Устройство содержит два перемножителя, первые входы которых объединены и являются входом устройства, фазовращатель, синтезатор частоты, опорный генератор, два аналого-цифровых преобразователя, два интегратора со сбросом, вычислитель двойного арктангенса, два умножителя-делителя, петлевой фильтр, синтезатор фазы, два блока вычитания, выход второго блока вычитания является выходом устройства. Технический результат заключается в снижении энергетических потерь при когерентной демодуляции сигналов, который достигается путем компенсации вращения фазы вектора сигнала, вызванного нестабильностью несущей частоты, в цифровой форме линейными элементами, без применения управляемого генератора. 3ил.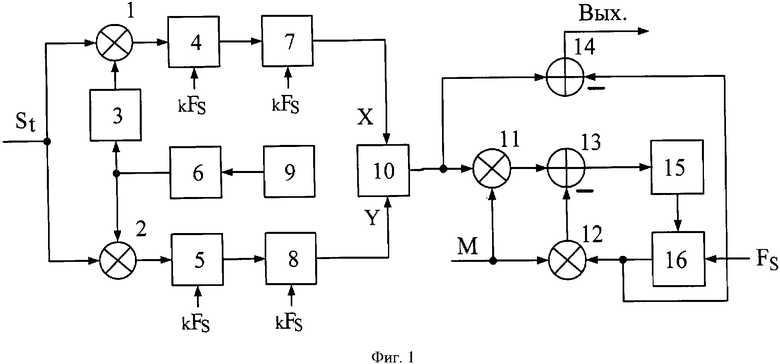
Устройство компенсации нестабильности несущей частоты фазоманипулированных сигналов, содержащее первый и второй перемножители, первый и второй интеграторы со сбросом, петлевой фильтр, фазовращатель, причем первые входы первого и второго перемножителей объединены и являются входом устройства, выход фазовращателя соединен со вторым входом первого перемножителя, а второй вход второго перемножителя объединен с входом фазовращателя, отличающееся тем, что дополнительно содержит первый и второй аналого-цифровые преобразователи, опорный генератор, синтезатор частоты, вычислитель двойного арктангенса, первый и второй умножители-делители, первый и второй блоки вычитания, синтезатор фазы, причем выход опорного генератора соединен с входом синтезатора частоты, выход которого соединен с объединенными вторым входом второго перемножителя и входом фазовращателя, выходы первого и второго перемножителей соединены с входами, соответственно, первого и второго аналого-цифровых преобразователей, выходы которых соединены с входами, соответственно, первого и второго интеграторов со сбросом, выходы первого и второго интеграторов со сбросом соединены, соответственно, с первым и вторым входами вычислителя двойного арктангенса, выход которого соединен с входом первого умножителя-делителя и с первым входом второго блока вычитания, выход первого умножителя-делителя соединен с первым входом первого блока вычитания, выход первого блока, вычитания соединен с входом петлевого фильтра, выход которого соединен с входом синтезатора фазы, при этом выход синтезатора фазы соединен с входом второго умножителя-делителя и вторым входом второго блока вычитания, выход которого является выходом устройства, выход второго умножителя-делителя соединен со вторым входом первого блока вычитания, вторые входы первого и второго умножителей-делителей объединены и являются управляющим входом устройства.
| ПРОКИС Дж | |||
| Цифровая связь | |||
| М.: Радио и связь, 2000, с.296, рис.6.2.10 | |||
| УСТРОЙСТВО ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ ШЕСТНАДЦАТИПОЗИЦИОННОЙ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 2003 |
|
RU2254687C1 |
| СПОСОБ ИНВЕРСНО-КВАДРАТУРНОГО ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2001 |
|
RU2187901C1 |
| ЕР 1107531 А1, 13.06.2001 | |||
| US 5940451 А, 17.08.1999. | |||

