Область техники
Изобретение относится к устройству и способу для калибровки облучающей системы аппарата для изготовления трехмерного изделия посредством облучения слоев исходного порошкообразного материала электромагнитным или корпускулярным излучением.
Уровень техники
Метод PBD (Powder Bed Fusion, расплавление подготовленного порошкового слоя) - это послойный аддитивный процесс, посредством которого, используя порошкообразные, в частности металлические и/или керамические, исходные материалы, можно изготавливать трехмерные изделия, имеющие сложные формы. С этой целью слой исходного порошкообразного материала наносят на носитель и подвергают пространственно селективному воздействию лазерным излучением в зависимости от желательной геометрии изделия, которое требуется изготовить. Лазерное излучение, проникающее в слой порошка, вызывает нагрев и, как следствие, сплавление или спекание частиц исходного порошкообразного материала. Затем на находящийся на носителе слой, подвергнутый лазерной обработке, наносят следующий слой исходного порошкообразного материала, и процесс повторяется до тех пор, пока изделие не приобретет желательные форму и размеры. Селективное лазерное сплавление/спекание может быть использовано для изготовления, по результатам автоматического проектирования, прототипов, инструментов, заменяющих частей или медицинских протезов, например зубных или ортопедических.
Аппарат для изготовления деталей из порошкообразных исходных материалов методом PBD описан, например, в ЕР 1793979 В1. Этот известный аппарат содержит рабочую камеру, в которой находится множество носителей для подлежащих изготовлению объектов сходной формы. Система для приготовления слоя порошка содержит держатель емкости для порошка, который может совершать возвратно-поступательное перемещение над носителями, чтобы наносить исходный порошкообразный материал, подлежащий облучению лазерным пучком, на соответствующие носители. Рабочая камера подсоединена к контуру подачи защитного газа, содержащему подающую линию, по которой защитный газ может поступать в рабочую камеру для создания в ней атмосферы защитного газа.
В ЕР 2335848 В1 описана облучающая система, которая может использоваться, например, в аппарате для изготовления трехмерного изделия путем облучения порошкообразных исходных материалов. Облучающая система содержит лазерный источник и оптический узел. Оптический узел, в который направляют лазерный пучок, испускаемый лазерным источником, содержит расширитель пучка и сканер. Внутри сканера установлены дифракционные оптические элементы, которые могут быть выведены на траекторию лазерного пучка излучения, чтобы разбить его на множество более мелких (элементарных) лазерных пучков. Эти элементы устанавливаются перед отклоняющим зеркалом, служащим для отклонения элементарных лазерных пучков. Лазерный пучок или элементарные лазерные пучки, выходящие из сканера, попадают в объектив, который представляет собой f-theta линзу.
Для калибровки облучающей системы и, прежде всего, оптического узла, используемых в аппарате для изготовления трехмерных изделий посредством облучения исходных порошкообразных материалов, на носитель, который при нормальном функционировании аппарата несет слои исходного порошкообразного материала, подлежащего облучению, наносится так называемая выжигаемая фольга (burn-off foil). Затем выжигаемую фольгу облучают в соответствии с заданным паттерном, так что на фольге формируется выжженное изображение паттерна облучения. Выжженное изображение преобразуется в цифровую форму и сравнивается с цифровым референтным изображением паттерна облучения. На основе результатов сравнения между оцифрованным выжженным изображением и референтным изображением облучающий модуль калибруют таким образом, чтобы компенсировать различия между фактическим выжженным изображением и референтным изображением.
Выжигаемая фольга используется также для калибровки треков (следов) группы пучков излучения, в частности лазерных пучков, локализованных в зонах взаимного наложения пучков между смежными облучаемыми участками, заданными на носителе в аппарате для изготовления трехмерных изделий посредством облучения исходных порошкообразных материалов, содержащем группу облучающих модулей, как это описано, например, в ЕР 2875897 В1 или в ЕР 2862651 А1.
В принципе, толщину линии, образующейся на выжигаемой фольге в результате облучения фольги, можно также использовать как средство измерения дефокусировки пучка излучения. Однако точность и надежность этих измерений, как правило, являются слишком низкими для их использования при калибровке фокусировки пучка излучения. Поэтому для такой калибровки обычно дополнительно проводят измерения каустической поверхности (каустики).
Раскрытие изобретения
Задача, на решение которой направлено изобретение, состоит в разработке устройства и способа, обеспечивающих надежную и точную калибровку облучающей системы, используемой в аппарате для изготовления трехмерного изделия посредством облучения слоев исходного порошкообразного материала электромагнитным или корпускулярным излучением.
Данная задача решается посредством устройства и способа, охарактеризованных соответственно в пп. 1 и 10 прилагаемой формулы изобретения.
Устройство для калибровки облучающей системы аппарата для изготовления трехмерного изделия содержит модуль управления, сконфигурированный для управления облучающей системой с обеспечением облучения пучком излучения облучаемой плоскости в соответствии с паттерном для калибровки. Облучающая система, подлежащая калибровке, может содержать источник излучения и комплект оптических элементов. Хотя облучающая система может содержать только один источник излучения, допустимо, чтобы она была снабжена группой таких источников. В этом варианте с каждым источником излучения может быть ассоциирован отдельный оптический узел, содержащий соответствующий комплект оптических элементов.
По меньшей мере один источник излучения может быть лазерным источником, например иттербиевым волоконным лазером с диодной накачкой. При этом комплект оптических элементов может, например, содержать расширитель пучка, служащий для расширения пучка излучения, испускаемого источником излучения, сканер и объектив. В альтернативном варианте в комплект оптических элементов может входить расширитель пучка, содержащий фокусирующую оптику и сканер. Посредством сканера можно изменять требуемым образом положение фокуса пучка излучения как в направлении распространения пучка излучения, так и в плоскости, перпендикулярной этому направлению. Сканер может быть сконструирован, как гальванометрический сканер, а объектив может являться f-theta объективом.
Облучаемой плоскостью может быть плоскость, которая в процессе нормального функционирования аппарата соответствует поверхности слоя исходного порошкообразного материала, нанесенного на носитель, и на которую воздействует пучок излучения, испускаемый облучающей системой, чтобы получить трехмерное изделие путем последовательного формирования слоев. Однако допустимо также, чтобы облучаемая плоскость, которая облучается пучком излучения в процессе калибровки облучающей системы, была смещена, в частности по вертикали, относительно поверхности слоя исходного порошкообразного материала, который облучается пучком излучения в процессе нормального функционирования аппарата.
Облучаемая плоскость предпочтительно находится внутри рабочей камеры, которая может быть выполнена с возможностью герметизации относительно окружающей ее среды, чтобы обеспечить возможность поддерживать в камере контролируемую, в частности инертную, атмосферу. Исходный порошкообразный материал, который в процессе нормального функционирования аппарата облучается пучком излучения, испускаемым облучающей системой, может представлять собой металлический порошок; однако, он может быть и керамическим порошком или порошком, содержащим различные материалы. Порошок может содержать частицы любых подходящих размеров при любом их распределении по размерам. Однако желательно использовать порошки с размерами частиц менее 100 мкм.
Модуль управления может быть электронным модулем, предназначенным только для управления калибровкой облучающей системы. Однако допустимо также, чтобы модуль управления, который может быть реализован аппаратурно или программно, был интегрирован в соответствующий модуль управления аппаратом для изготовления трехмерного изделия, обеспечивающий также, например, управление нормальным функционированием аппарата и/или облучающей системы. Паттерн для калибровки может представлять собой любой паттерн, пригодный, чтобы детектировать раскалибровку облучающей системы. Он может, например, содержать элементы в форме точек и/или линий, равномерно или неравномерно распределенных по облучаемой плоскости.
Устройство для калибровки облучающей системы содержит также сенсорный блок, выполненный с возможностью размещения в облучаемой плоскости и передачи, как результат его облучения пучком излучения в соответствии с паттерном для калибровки, сигналов в модуль управления. Таким образом, сенсорный блок является чувствительным к облучению пучком излучения, испускаемым облучающей системой, и формирует электронные сигналы, характеристичные для паттерна, в соответствии с которым пучок излучения, испускаемый облучающей системой, облучает сенсорный блок. Таким образом, производится электронное отслеживание и "регистрация" паттерна, в соответствии с которым пучок излучения, испускаемый облучающей системой, облучает сенсорный блок. В результате устройство для калибровки облучающей системы устраняет необходимость в применении одноразовой выжигаемой фольги для отслеживания и "регистрации" паттерна для калибровки, которому следует пучок излучения при облучении облучаемой плоскости в процессе калибровки облучающей системы. В качестве примеров, сенсорный блок может содержать фотодатчик, фоточип, фотодиод, ПЗС-датчик и/или КМОП-датчик.
Модуль управления в устройстве для калибровки облучающей системы сконфигурирован также для формирования, на основе сигналов, формируемых сенсорным блоком, цифрового изображения фактического паттерна облучения, обеспечиваемого пучком излучения, падающим на сенсорный блок, чтобы провести сравнение данного цифрового изображения с цифровым изображением референтного паттерна с целью выявить расхождение между фактическим и референтным паттернами, а также для калибровки облучающей системы на основе выявленного расхождения между фактическим и референтным паттернами. Таким образом, на основе сигналов, поступивших в модуль управления от сенсорного блока, модуль управления генерирует цифровое изображение фактического ("реального") паттерна облучения, сравнивает это изображение "реального" паттерна с цифровым изображением референтного паттерна и калибрует облучающую систему на основе выявленного расхождения между фактическим и референтным паттернами.
В результате можно исключить операцию оцифровки выжженного изображения паттерна облучения, формируемого на выжигаемой фольге согласно известным способам калибровки. Таким образом, отпадает необходимость доставлять выжигаемую фольгу с места установки аппарата, снабженного облучающей системой, подлежащей калибровке, к месту, где производится анализ этой фольги, например к местонахождению изготовителя аппарата. Как следствие, становится возможной экономия затрат и времени. Кроме того, появляется возможность избежать погрешностей, связанных с оцифровкой выжженного на фольге изображения паттерна облучения. Благодаря этому можно повысить чувствительность определения расхождений между фактическим и референтным паттернами, что позволит проводить калибровку облучающей системы с высокой точностью и с высокой надежностью.
Процесс калибровки, проводимой посредством описанного устройства, касается, в частности, сканера оптического узла облучающей системы, т.е. устройство можно использовать для калибровки такого сканера. Однако благодаря высокой точности цифрового изображения фактического паттерна облучения, который может быть получен с помощью сенсорного блока, устройство можно использовать также, чтобы калибровать сканер оптического узла облучающей системы с целью обеспечить желательную фокусировку пучка излучения, как это будет подробно описано далее. Это позволит избежать дополнительных измерений каустики, которые обычно необходимы для фокусировки пучка излучения. В дополнение, устройство может использовать измерения эллиптической дисторсии пучка излучения, падающего на облучаемую плоскость. Эти измерения могут оказаться релевантными, например, на стадии изготовления изделия при облучении угловых зон в облучаемой плоскости, удаленных от центра этой плоскости. Используя эти измерения, можно инициировать соответствующую компенсацию искажений пучка.
Устройство для калибровки облучающей системы, которое предназначено для использования для калибровки только сканера оптического узла этой системы, может быть снабжено недорогим сенсорным блоком, сконфигурированным для цифрового детектирования каждым пикселем независимо от того, облучается ли он или нет. Однако, если устройство для калибровки облучающей системы должно быть использовано для фокусировки пучка излучения или для компенсации искажений пучка, сенсорный блок должен быть пригоден также для измерения интенсивности пучка излучения в конкретном местонахождении пикселя. Таким образом, устройство может быть снабжено сенсорным блоком, сконструированным в зависимости от конкретных требований.
В предпочтительном варианте устройства для калибровки облучающей системы модуль управления сконфигурирован для калибровки этой системы на основе выявленного расхождения между фактическим и референтным паттернами таким образом, чтобы устранить расхождение между данными паттернами. Это позволяет осуществить особенно легкую и надежную калибровку облучающей системы.
Сенсорный блок может быть интегрирован в носитель, на котором в процессе нормального функционирования аппарата, т.е. в процессе изготовления трехмерного изделия, находится исходный порошкообразный материал, подлежащий облучению. В этом варианте устройства один и тот же носитель используется как при осуществлении калибровки облучающей системы аппарата, так и при нормальном функционировании аппарата. В результате процесс калибровки может осуществляться весьма эффективно в отношении временных затрат, без изменения комплектации аппарата.
Однако допустимо также, в качестве альтернативы, интегрировать сенсорный блок в специальный калибровочный носитель, выполненный с возможностью замены основного носителя при калибровке облучающей системы. В этом варианте устройства для калибровки облучающей системы процесс калибровки также может проводиться эффективно в отношении временных затрат, поскольку основной носитель, который в процессе нормального функционирования аппарата несет исходный порошкообразный материал, подлежащий облучению, может быть просто и легко заменен калибровочным носителем. Кроме того, появляется возможность избежать повреждений и ухудшения работоспособности сенсорного блока, которые могут возникать, если пучок излучения может воздействовать на сенсорный блок также и в процессе нормального функционирования аппарата.
Сенсорный блок может содержать группу датчиков, установленных, с пространственным разделением, в облучаемой плоскости. Например, индивидуальные датчики могут быть размещены в облучаемой плоскости в местах расположения элементов паттерна для калибровки, имеющих форму точек и/или линий. Использование индивидуальных датчиков с относительно малыми размерами может привести к уменьшению стоимости устройства для калибровки облучающей системы. При этом зону детектирования для каждого из датчиков предпочтительно выбирают такой, чтобы датчики облучались пучком излучения, формируемым облучающей системой в соответствии с паттерном для калибровки, даже при нарушениях калибровки облучающей системы. Другими словами, зона детектирования для каждого из датчиков должна быть достаточно большой, чтобы гарантировать, в процессе калибровки облучающей системы, доступность датчиков для пучка излучения, испускаемого облучающей системой, даже если фактический паттерн облучения, в соответствии с которым пучок излучения перемещается в процессе калибровки по облучаемой плоскости, смещен относительно референтного паттерна.
В альтернативном варианте сенсорный блок может быть снабжен единственным датчиком, зона детектирования для которого, по существу, покрывает облучаемую плоскость. Устройство при таком выполнении функционирует особенно надежно, причем даже в случае существенной раскалибровки облучающей системы.
Цифровое изображение референтного паттерна может храниться в памяти модуля управления. Однако допустимо также, в порядке альтернативы, хранить цифровое изображение референтного паттерна в памяти, ассоциированной с другим блоком, отличным от модуля управления, или в мобильной запоминающей среде.
Далее, модуль управления может быть сконфигурирован для отображения цифрового изображения референтного паттерна и/или цифрового изображения фактического паттерна облучения на дисплейном устройстве. Таким образом, результаты процесса калибровки могут быть визуализированы.
Модуль управления может быть сконфигурирован для управления облучающей системой таким образом, чтобы мощность пучка излучения в процессе калибровки облучающей системы была меньше, чем в процессе нормального функционирования аппарата. Например, в процессе калибровки облучающей системы модуль управления может управлять облучающей системой таким образом, чтобы мощность пучка излучения была уменьшена до 1% мощности пучка излучения в процессе нормального функционирования аппарата. Благодаря использованию при калибровке облучающей системы пучка излучения с пониженной мощностью можно гарантировать, что сенсорный блок не будет поврежден пучком излучения.
С целью уменьшения мощности пучка излучения модуль управления может управлять облучающей системой таким образом, чтобы на траектории пучка находились ловушки или делители пучка, ослабляющие пучок излучения, например путем пропускания его через серый фильтр. Как альтернатива, допустимо также, по меньшей мере при калибровке одного или более сканеров облучающей системы, использовать калибровочный источник излучения, имеющий меньшую мощность, чем источник пучка, используемый в процессе нормального функционирования аппарата. Однако меры по уменьшению мощности пучка излучения должны выбираться такими, чтобы уменьшение мощности пучка излучения не влияло на положение его фокуса.
В предпочтительном варианте устройства для калибровки облучающей системы модуль управления сконфигурирован для: определения ширины линии фактического паттерна облучения, обеспечиваемого пучком излучения, падающим на сенсорный блок, проведения сравнения измеренной ширины линии с референтной шириной линии и калибровки облучающей системы с целью сфокусировать пучок излучения по результатам сравнения измеренной ширины линии и ширины референтной линии. Как уже было отмечено, благодаря высокой точности и высокому разрешению цифрового изображения фактического паттерна облучения, формируемого с помощью сенсорного блока, расхождение между измеренной шириной линии и шириной референтной линии может быть определено модулем управления с требуемой точностью, позволяющей использовать это расхождение как базу для фокусировки пучка излучения. В этом случае облучающая система может быть прокалибрована на основе выявленного расхождения между измеренной шириной линии и шириной референтной линии таким образом, чтобы устранить это расхождение. Как результат, фокусировка пучка излучения может быть достигнута без необходимости проводить дополнительные измерения каустики.
Далее, модуль управления может быть сконфигурирован для определения формы пятна излучения, формируемого пучком излучения, падающим на сенсорный блок. Это позволяет, в частности, выявить эллиптическую дисторсию пучка излучения. Соответственно, модуль управления может быть сконфигурирован также для проведения сравнения определенной формы пятна с референтной формой и для калибровки облучающей системы с целью компенсировать эллиптическую дисторсию пучка излучения по результатам сравнения определенной и референтной форм.
Облучающая система, подлежащая калибровке, может содержать группу облучающих модулей. При этом каждый облучающий модуль может быть сконфигурирован для облучения пучком излучения участка облучаемой плоскости, ассоциированного с этим модулем, и промежуточного участка (зоны взаимного наложения пучков). В этом случае каждый облучающий модуль облучающей системы может содержать свой отдельный источник излучения. Однако допустимо также, чтобы каждый из группы облучающих модулей снабжался пучком излучения от общего источника излучения. Промежуточный участок облучаемой плоскости может облучаться пучками излучения, испускаемыми только двумя облучающими модулями, сконфигурированными для облучения участков, расположенных смежно с данным промежуточным участком. Однако допустимо также, например, применительно к промежуточному участку, расположенному в зоне пересечения четырех квадратных облучаемых участков, облучение пучками излучения, испускаемыми более чем двумя, например четырьмя, облучающими модулями. При этом в облучаемой плоскости, например, в зависимости от количества и расположения облучаемых участков, может быть задан только один промежуточный участок или группа промежуточных участков.
Устройство для калибровки облучающей системы, содержащей группу облучающих модулей, предпочтительно снабжено модулем управления, сконфигурированным для управления группой облучающих модулей с целью облучения выбранного промежуточного участка пучками излучения согласно соответствующим паттернам калибровки. При этом модуль управления может быть сконфигурирован также для генерирования, на основе сигналов, формируемых сенсорным блоком, цифрового изображения фактических паттернов облучения, сформированных пучками излучения, падающими на сенсорный блок. Дополнительно, модуль управления может быть сконфигурирован для проведения сравнения цифрового изображения фактических паттернов облучения с цифровым изображением соответствующих референтных паттернов с целью выявить расхождения между фактическими и соответствующими им референтными паттернами. Кроме того, модуль управления может быть сконфигурирован для калибровки облучающих модулей на основе выявленных расхождений между фактическими и референтными паттернами.
Таким образом, устройство для калибровки облучающей системы может быть использовано для регистрации треков группы пучков излучения, падающих на промежуточный участок, и для калибровки этих треков желательным образом. Следовательно, сканеры группы облучающих модулей могут быть откалиброваны и настроены относительно друг друга.
Согласно способу калибровки облучающей системы аппарата для изготовления трехмерного изделия осуществляют управление облучающей системой с обеспечением облучения пучком излучения паттерна на облучаемой плоскости в соответствии с паттерном для калибровки. В облучаемой плоскости размещают сенсорный блок, который формирует сигналы как результат его облучения пучком излучения в соответствии с паттерном для калибровки. На основе сигналов, формируемых сенсорным блоком, генерируют цифровое изображение фактического паттерна облучения, обеспечиваемого пучком излучения, падающим на сенсорный блок, и сравнивают цифровое изображение фактического паттерна облучения с цифровым изображением референтного паттерна с целью выявить расхождение между фактическим и референтным паттернами. Затем калибруют облучающую систему на основе выявленного расхождения между этими паттернами.
В предпочтительном варианте способа облучающую систему калибруют на основе выявленного расхождения между фактическим и референтным паттернами таким образом, чтобы устранить расхождение между этими паттернами.
Сенсорный блок может быть интегрирован в носитель, на котором в процессе нормального функционирования аппарата находится исходный порошкообразный материал, подлежащий облучению. Альтернативно, сенсорный блок может быть интегрирован в специальный калибровочный носитель, выполненный с возможностью замены, в процессе калибровки облучающей системы, основного носителя.
В предпочтительном варианте способа калибровки облучающей системы может использоваться сенсорный блок, содержащий группу датчиков, расположенных, с пространственным разделением, в облучаемой плоскости. Зону детектирования для каждого из датчиков предпочтительно выбирают таким образом, чтобы обеспечить возможность облучения датчиков пучком излучения, формируемым облучающей системой в соответствии с паттерном для калибровки, даже в случае нарушения калибровки облучающей системы.
Альтернативно, сенсорный блок может содержать единственный датчик, расположенный в облучаемой плоскости. Зону детектирования для единственного датчика предпочтительно выбирают так, чтобы, по существу, покрыть облучаемую плоскость.
Цифровое изображение референтного паттерна может храниться в памяти модуля управления, в памяти, ассоциированной с другим блоком, отличным от модуля управления, или в мобильной запоминающей среде.
Цифровое изображение референтного паттерна и/или цифровое изображение фактического паттерна облучения могут отображаться на дисплейном устройстве.
Облучающей системой можно управлять таким образом, чтобы мощность пучка излучения в процессе калибровки облучающей системы была меньше, чем в процессе нормального функционирования аппарата.
Способ калибровки облучающей системы может включать измерение ширины линии фактического паттерна облучения, обеспечиваемого пучком излучения, падающим на сенсорный блок, и проведение сравнения измеренной ширины линии с референтной шириной линии. По результатам сравнения измеренной ширины линии и ширины референтной линии, т.е. на основе расхождения между измеренной шириной линии и шириной референтной линии, облучающая система может быть прокалибрована с целью сфокусировать пучок излучения.
Кроме того, способ калибровки облучающей системы может дополнительно включать определение формы пятна излучения, формируемого пучком излучения, падающим на сенсорный блок. Эта форма затем может сравниваться с референтной формой, и облучающая система может быть прокалибрована с целью компенсировать эллиптическую дисторсию пучка излучения по результатам сравнения определенной и референтной форм.
Способ калибровки облучающей системы аппарата для изготовления трехмерного изделия, которая содержит группу облучающих модулей, каждый из которых сконфигурирован для облучения пучком излучения участка облучаемой плоскости, ассоциированного с этим модулем, и промежуточного участка между смежными облучаемыми участками, может включать операцию управления группой облучающих модулей с обеспечением облучения выбранного промежуточного участка пучками излучения согласно соответствующим паттернам калибровки. На основе сигналов, формируемых сенсорным блоком, может генерироваться цифровое изображение фактических паттернов облучения, сформированных пучками излучения, падающими на сенсорный блок. Затем может быть проведено сравнение цифрового изображения фактических паттернов облучения с цифровым изображением соответствующих референтных паттернов с целью выявить расхождения между фактическими и соответствующими им референтными паттернами. В результате облучающие модули могут быть прокалиброваны на основе выявленных расхождений между этими паттернами.
Краткое описание чертежей
Далее предпочтительные варианты изобретения будут подробно описаны со ссылками на прилагаемые схематичные чертежи.
На фиг. 1 представлен аппарат для изготовления трехмерных изделий посредством селективного облучения исходного порошкообразного материала.
На фиг. 2 представлен первый вариант устройства для калибровки облучающей системы аппарата согласно фиг. 1.
На фиг. 3 представлен второй вариант устройства для калибровки облучающей системы аппарата согласно фиг. 1.
Осуществление изобретения
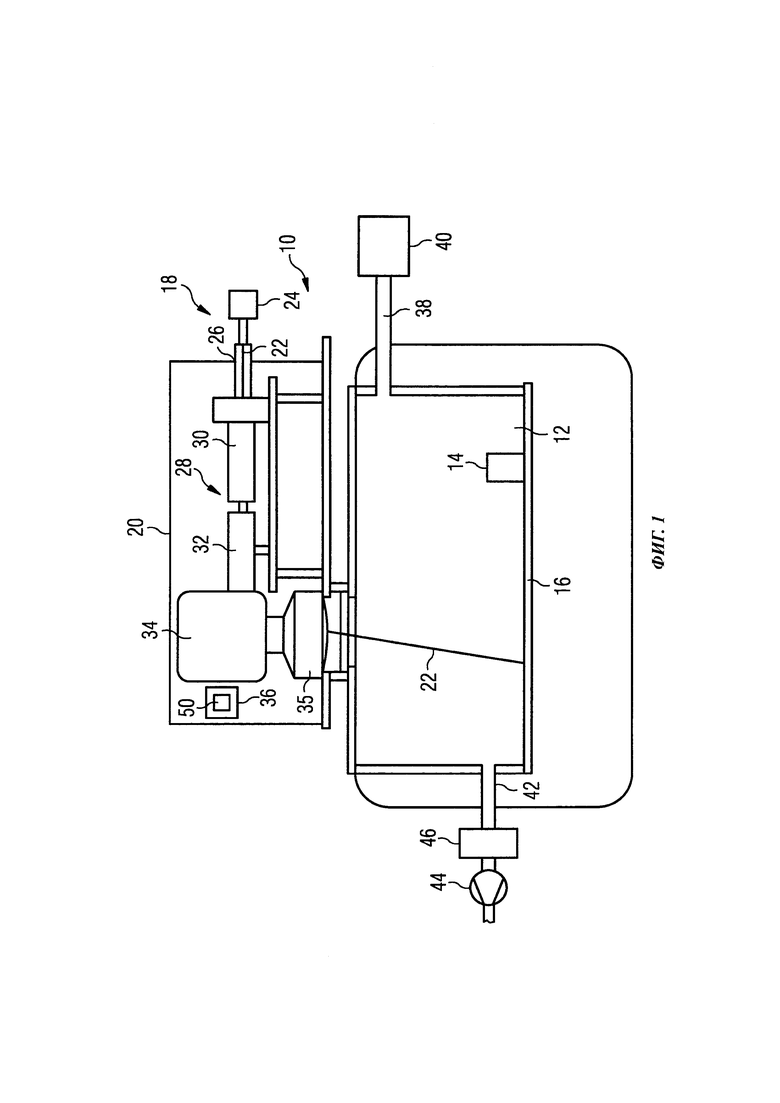
На фиг. 1 представлен аппарат 10 для изготовления трехмерного изделия. Аппарат 10 содержит рабочую камеру 12. Установленное в рабочей камере 12 устройство 14 для нанесения порошка служит для нанесения исходного порошкообразного материала на носитель 16. Носитель 16 сконструирован с возможностью смещаться в вертикальном направлении. При таком выполнении по мере увеличения высоты изготавливаемого изделия в результате наращивания слоев исходного порошкообразного материала носитель 16 можно перемещать в вертикальном направлении вниз.
Аппарат 10 дополнительно содержит облучающую систему 18 для селективного воздействия излучением, в частности лазерным излучением, на исходный порошкообразный материал, нанесенный на носитель 16. Посредством системы 18 нанесенный на носитель 16 исходный порошкообразный материал может быть подвергнут пространственно-селективному облучению в зависимости от желательной геометрии изготавливаемого изделия. Облучающая система 18 имеет герметичный корпус 20. Пучок 22 излучения, т.е. лазерный пучок, формируемый источником 24 излучения (в данном варианте лазерным источником, например иттербиевым волоконным лазером с диодной накачкой, генерирующим лазерное излучение на длине волны примерно 1070-1080 нм), вводится в корпус 20 через отверстие 26.
Облучающая система 18 содержит также оптический узел 28, формирующий и направляющий пучок 22 излучения. Оптический узел 28 содержит: оптические элементы, такие как расширитель 30 пучка, служащий для расширения пучка 22 излучения, испускаемого источником 24 излучения; фокусирующую линзу 32 для фокусирования пучка 22 излучения; сканер 34 и объектив 35. Сканер 34 и объектив 35 могут быть, например, сконструированы, как гальванометрический сканер и объектив в виде f-theta линзы. Посредством сканера 34 можно изменять и адаптировать положение фокуса пучка 22 излучения как в направлении его распространения, так и в плоскости, перпендикулярной этому направлению. Функционирование облучающей системы 18 управляется посредством модуля 36 управления.
Рабочая камера 12 герметизирована относительно атмосферы, т.е. среды, окружающей эту камеру. При этом рабочая камера 12 подключена к линии 38 подачи газа, по которой в камеру может подаваться газ от источника 40 газа. Газ, поступающий в рабочую камеру 12 от источника 40, может быть нейтральным газом, например аргоном или азотом.
В процессе воздействия электромагнитным или корпускулярным излучением на нанесенный на носитель 16 исходный порошкообразный материал с целью сформировать из этого материала изделие путем добавления слоев отводящая линия 42 обеспечивает возможность отведения из рабочей камеры 12 газа, несущего загрязняющие частицы, например частицы исходного порошкообразного материала или частицы сварочного дыма. Газ, содержащий твердые загрязняющие частицы, выводится из рабочей камеры 12 посредством откачивающего устройства 44, например насоса. Установленный в отводящей линии перед откачивающим устройством 44 фильтр 46 служит для отфильтровывания загрязняющих частиц из потока газа, отводимого из рабочей камеры 12. После прохождения через фильтр 46 поток газа может быть возвращен в рабочую камеру 12 по линии 38 подачи газа.
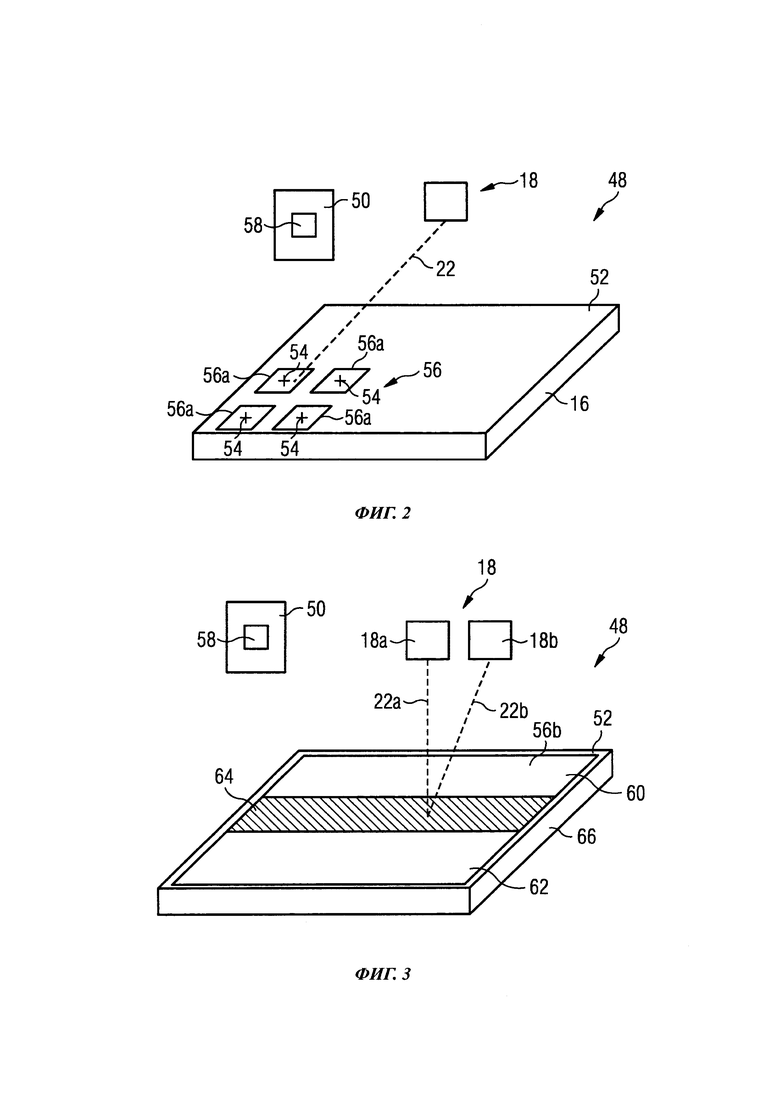
На фиг. 2 и 3 показаны два различных варианта устройства 48 для калибровки облучающей системы 18 аппарата 10. В варианте по фиг. 2 устройство 48 используется при калибровке облучающей системы 18 аппарата 10 для изготовления трехмерного изделия, которая содержит единственный облучающий модуль. Устройство 48 содержит также модуль 50 управления, который входит в состав модуля 36 для управления функционированием облучающей системы 18. Для осуществления калибровки облучающей системы 18 модуль 50 управления управляет облучающей системой 18 таким образом, чтобы обеспечить облучение пучком 22 излучения облучаемой плоскости 52 в соответствии с паттерном для калибровки.
Облучаемая плоскость 52, показанная на фиг. 2 и 3, идентична плоскости, которая в процессе нормального функционирования аппарата 10 соответствует поверхности слоя исходного порошкообразного материала, который нанесен на носитель 16 и на который воздействует пучок 22 излучения, испускаемый облучающей системой 18, чтобы получить трехмерное изделие путем последовательного формирования слоев. Паттерн для калибровки может представлять собой любой паттерн, пригодный, чтобы детектировать раскалибровку облучающей системы 18. В варианте по фиг. 2 этот паттерн содержит группу точечных элементов, которые равномерно распределены по облучаемой плоскости 52. На фиг. 2 схематично проиллюстрированные точечные элементы паттерна для калибровки обозначены, как 54. Специалисту будет, однако, понятно, что нет необходимости физически размещать на носителе 16 точечные элементы 54. Вместо этого, точечные элементы 54 могут представлять собой просто части цифрового паттерна для калибровки, записанного в память 58 модуля 50 управления.
Устройство 48 содержит также сенсорный блок 56, который размещен в облучаемой плоскости 52 для осуществления калибровки облучающей системы 18. В процессе калибровки облучающей системы 18 под контролем модуля 50 управления сенсорный блок 56 облучается пучком излучения, формируемым облучающей системой 18 в соответствии с паттерном для калибровки. Сенсорный блок 56, который является чувствительным к облучению пучком 22 излучения, испускаемым облучающей системой 18, генерирует электронные сигналы, характеристичные для паттерна, в соответствии с которым пучок 22 излучения, испускаемый облучающей системой, облучает сенсорный блок 56. Таким образом, производится электронное отслеживание и "регистрация" паттерна, в соответствии с которым пучок 22 излучения, испускаемый облучающей системой 18, облучает сенсорный блок 56.
Принимая выходные сигналы от сенсорного блока 56, модуль 50 управления на основе этих сигналов генерирует цифровое изображение фактического паттерна облучения, обеспечиваемого пучком 22 излучения, падающим на сенсорный блок 56. После этого модуль 50 управления сравнивает цифровое изображение фактического паттерна излучения с цифровым изображением референтного паттерна, которое хранится в памяти 58 модуля 50 управления. По результатам сравнения цифрового изображения фактического паттерна излучения и цифрового изображения референтного паттерна модуль 50 управления определяет расхождение между этими паттернами. Другими словами, на основе сигналов, поступивших в модуль 50 управления от сенсорного блока 56, модуль 50 управления генерирует цифровое изображение фактического ("реального") паттерна облучения и сравнивает это изображение "реального" паттерна с цифровым изображением референтного паттерна с целью выявить расхождение между фактическим и референтным паттернами.
В завершение, модуль 50 управления калибрует облучающую систему 18, в частности сканер 34 оптического узла 28 облучающей системы 18, на основе выявленного расхождения между фактическим и референтным паттернами. Более конкретно, модуль 50 управления калибрует облучающую систему 18 на основе выявленного расхождения между фактическим и референтным паттернами таким образом, чтобы устранить это расхождение. Другими словами, фактический паттерн облучения приводится в соответствие с референтным паттерном.
В представленном на фиг. 2 варианте устройства 48 для калибровки облучающей системы 18 аппарата 10 для изготовления трехмерного изделия сенсорный блок 56 интегрирован в тот носитель 16, который в процессе нормального функционирования аппарата 10 для изготовления трехмерного изделия несет исходный порошкообразный материал, подлежащий облучению. Таким образом, в варианте по фиг. 2 один и тот же носитель 16 используется и в процессе калибровки облучающей системы 18 аппарата 10, и при нормальном функционировании аппарата 10.
Далее, в устройстве 48, представленном на фиг. 2, сенсорный блок 56 содержит группу датчиков 56а, установленных, с пространственным разделением, в облучаемой плоскости 52. Индивидуальные датчики 56а могут быть фотодатчиками, фоточипами, фотодиодами, ПЗС-датчиками и/или КМОП-датчиками. Как наглядно показано на фиг. 2, индивидуальный датчик 56а находится в облучаемой плоскости 52 в месте расположения каждого из точечных элементов паттерна для калибровки. Таким образом, комбинированная (объединенная) зона детектирования для группы индивидуальных датчиков 56а не покрывает полностью облучаемую плоскость 52. Однако зона детектирования для каждого из датчиков 56а выбрана таким образом, что датчики 56а облучаются пучком 22 излучения, формируемым облучающей системой 18 в соответствии с паттерном для калибровки, даже если имеются нарушения калибровки облучающей системы 18. Другими словами, зона детектирования для каждого из датчиков 56а является достаточно большой с целью гарантировать, что датчики 56а в процессе калибровки облучающей системы 18 воспринимают пучок 22 излучения, испускаемый облучающей системой 18, даже если фактический паттерн облучения, согласно которому пучок 22 излучения в процессе калибровки облучающей системы 18 перемещается по облучаемой плоскости 52, смещен относительно референтного паттерна.
В дополнение к пространственному согласованию фактического паттерна облучения, согласно которому пучок 22 излучения перемещается в процессе калибровки облучающей системы 18 по облучаемой плоскости 52, с референтным паттерном, процесс калибровки, осуществляемый под управлением модуля 50 управления, включает калибровку облучающей системы 18 и, в частности, сканера 34 оптического узла 28 облучающей системы 18 с целью фокусировки желательным образом пучка 22 излучения, испускаемого облучающей системой 18. Для фокусировки пучка 22 излучения модуль 50 управления обеспечивает измерение ширины линии фактического паттерна облучения, обеспечиваемого пучком 22 излучения, падающим на сенсорный блок 56, чтобы провести сравнение измеренной ширины линии с референтной шириной линии и провести калибровку облучающей системы 18 с целью фокусирования пучка 22 излучения по результатам сравнения измеренной ширины линии с шириной референтной линии. Более конкретно, модуль 50 управления определяет расхождение между измеренной шириной линии и шириной референтной линии и проводит калибровку облучающей системы 18 таким образом, чтобы устранить расхождение между измеренной шириной линии и шириной референтной линии. Тем самым достигается фокусирование пучка излучения.
Устройство 48, представленное на фиг. 3, служит для калибровки облучающей системы 18 аппарата 10 для изготовления трехмерного изделия, которая содержит группу облучающих модулей 18а, 18b. Каждый облучающий модуль 18а, 18b сконфигурирован для облучения пучком 22а, 22b излучения ассоциированного с ним облучаемого участка 60, 62 облучаемой плоскости 52 и промежуточного участка 64 между смежными облучаемыми участками 60, 62. Таким образом, промежуточный участок 64 облучается пучками 22а, 22b излучения, испускаемыми обоими облучающими модулями 18а, 18b.
Для калибровки облучающей системы 18, содержащей группу облучающих модулей 18а, 18b, модуль 50 управления устройства 48 управляет группой этих модулей таким образом, чтобы облучать промежуточный участок 64 пучками 22а, 22b излучения, испускаемыми облучающими модулями 18а, 18b согласно соответствующим паттернам калибровки. Модуль 50 управления дополнительно генерирует, на основе сигналов, формируемых сенсорным блоком 56, цифровое изображение фактических паттернов облучения, формируемых пучками 22а, 22b излучения, падающими на сенсорный блок 56. Кроме того, модуль 50 управления сравнивает цифровое изображение фактических паттернов облучения с цифровым изображением соответствующих референтных паттернов с целью выявить расхождения между фактическими и соответствующими им референтными паттернами. В завершение, модуль 50 управления обеспечивает калибровку облучающих модулей 18а, 18b на основе выявленных расхождений между фактическими и референтными паттернами. Таким образом, устройство 48 может быть использовано для регистрации треков группы пучков 22а, 22b излучения, падающих на промежуточные участки 64, и для калибровки этих треков желательным образом. Следовательно, сканеры 34 группы облучающих модулей 18а, 18b могут быть откалиброваны и настроены относительно друг друга.
Устройство 48, представленное на фиг. 3, отличается от устройства по фиг. 2 также тем, что сенсорный блок 56 снабжен единственным датчиком 56b, зона детектирования которого выбрана так, что она, по существу, перекрывает облучаемую плоскость 52. Подобно индивидуальным датчикам 56а сенсорного блока 56 согласно фиг. 2, единственный датчик 56b сенсорного блока 56 по фиг. 3 может быть фотодатчиком, фоточипом, фотодиодом, ПЗС-датчиком или КМОП-датчиком. При этом сенсорный блок 56 интегрирован в калибровочный носитель 66, выполненный с возможностью замены, в процессе калибровки облучающей системы 18, основного носителя 16, на котором в процессе нормального функционирования аппарата 10 находится исходный порошкообразный материал, подлежащий облучению. В остальных отношениях функционирование и конструкция устройства 48 по фиг. 3 соответствуют функционированию и конструкции устройства 48 по фиг. 2.
При этом опционные признаки устройства 48 для калибровки облучающей системы 18 аппарата 10 для изготовления трехмерного изделия, описанного со ссылкой на конкретный вариант устройства 48 по фиг. 2, могут быть заменены, по желанию, соответствующими признаками устройства 48, описанного со ссылками на вариант устройства согласно фиг. 3. Например, устройство 48 по фиг. 2 может быть снабжено сенсорным блоком 56, который содержит единственный датчик 56b, описанный применительно к устройству 48 по фиг. 3. Другими словами, сенсорный блок 56 устройства 48 по фиг. 3 может быть интегрирован в носитель 16, на котором в процессе нормального функционирования аппарата 10, находится исходный порошкообразный материал, подлежащий облучению, и наоборот.
Устройство (48) для калибровки облучающей системы (18) аппарата (10) для изготовления трехмерного изделия содержит модуль (50) управления, сконфигурированный для управления облучающей системой (18) с обеспечением облучения пучком (22; 22а, 22b) излучения облучаемой плоскости (52) в соответствии с паттерном для калибровки. Устройство (48) содержит также сенсорный блок (56), выполненный с возможностью его размещения в облучаемой плоскости (52) и передачи, как результат его облучения пучком (22; 22а, 22b) излучения в соответствии с паттерном для калибровки, сигналов в модуль (50) управления. Модуль (50) управления сконфигурирован также для генерирования, на основе сигналов, формируемых сенсорным блоком (56) при его облучении пучком (22; 22а, 22b) излучения, цифрового изображения фактического паттерна облучения, чтобы провести сравнение этого изображения с цифровым изображением референтного паттерна с целью выявить расхождение между фактическим и референтным паттернами и прокалибровать облучающую систему (18) на основе выявленного расхождения между фактическим и референтным паттернами. 2 н. и 13 з.п. ф-лы, 3 ил.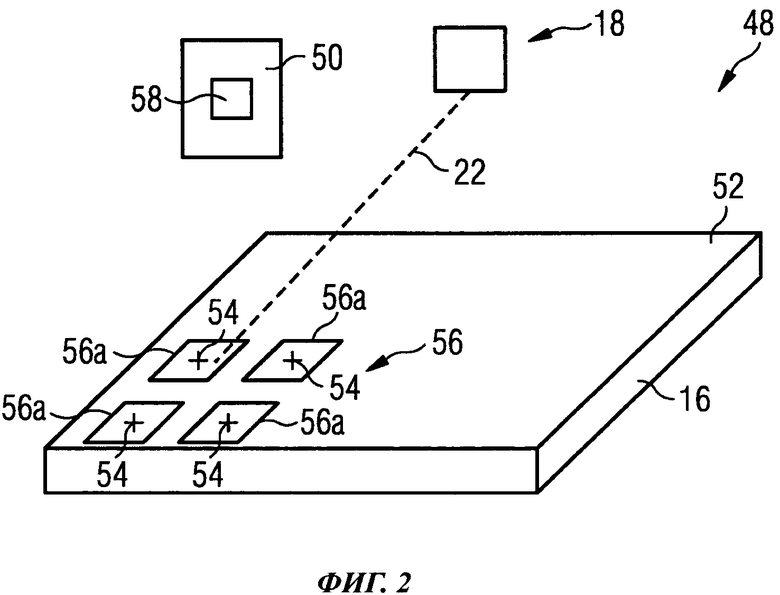
1. Аппарат (10) для изготовления трехмерного изделия, содержащий:
облучающую систему (18);
носитель (16), на котором в процессе нормального функционирования аппарата (10) находится исходный порошкообразный материал, подлежащий облучению, и
устройство (48) для калибровки облучающей системы (18) аппарата (10), содержащее:
- модуль (50) управления, сконфигурированный для управления облучающей системой (18) с обеспечением облучения пучком (22; 22а, 22b) излучения облучаемой плоскости (52) в соответствии с паттерном для калибровки, и
- сенсорный блок (56), выполненный с возможностью его размещения в облучаемой плоскости (52) и передачи, как результат его облучения пучком (22; 22а, 22b) излучения в соответствии с паттерном для калибровки, сигналов в модуль (50) управления,
причем модуль (50) управления сконфигурирован также для выполнения следующих операций:
- генерирования, на основе сигналов, формируемых сенсорным блоком (56) при его облучении пучком (22; 22а, 22b) излучения, цифрового изображения фактического паттерна облучения,
- проведения сравнения цифрового изображения фактического паттерна облучения с цифровым изображением референтного паттерна с целью выявить расхождение между фактическим и референтным паттернами и
- калибровки облучающей системы (18) на основе выявленных расхождений между фактическим и референтным паттернами,
при этом сенсорный блок (56) интегрирован в указанный носитель (16), на котором в процессе нормального функционирования аппарата (10) находится исходный порошкообразный материал, подлежащий облучению, или
сенсорный блок (56) интегрирован в специальный калибровочный носитель (66), предназначенный для замены, в процессе калибровки облучающей системы (18), указанного носителя (16), на котором в процессе нормального функционирования аппарата (10) находится исходный порошкообразный материал, подлежащий облучению.
2. Аппарат по п. 1, в котором модуль (50) управления сконфигурирован для калибровки облучающей системы (18), на основе выявленного расхождения между фактическим и референтным паттернами, таким образом, чтобы устранить расхождение между фактическим и референтным паттернами.
3. Аппарат по п. 1 или 2, в котором сенсорный блок (56) содержит группу датчиков (56а), расположенных, с пространственным разделением, в облучаемой плоскости (52), при этом зона детектирования для каждого из датчиков (56а) выбрана таким образом, чтобы обеспечить возможность облучения датчиков (56а) пучком (22; 22а, 22b) излучения, формируемым облучающей системой (18) в соответствии с паттерном для калибровки, даже в случае нарушения калибровки облучающей системы (18).
4. Аппарат по п. 1 или 2, в котором сенсорный блок (56) содержит единственный датчик (56b), зона детектирования для которого выбрана так, чтобы, по существу, покрыть облучаемую плоскость (52).
5. Аппарат по любому из пп. 1-4, в котором цифровое изображение референтного паттерна хранится в памяти (58) модуля (50) управления и/или модуль (50) управления сконфигурирован для отображения цифрового изображения референтного паттерна и/или цифрового изображения фактического паттерна облучения на дисплейном устройстве, и/или модуль (50) управления сконфигурирован для управления облучающей системой (18) таким образом, чтобы мощность пучка (22; 22а, 22b) излучения в процессе калибровки облучающей системы (18) была меньше, чем в процессе нормального функционирования аппарата (10).
6. Аппарат по любому из пп. 1-5, в котором модуль (50) управления сконфигурирован для:
- измерения ширины линии фактического паттерна облучения, обеспечиваемого пучком (22; 22а, 22b) излучения, падающим на сенсорный блок (56),
- проведения сравнения измеренной ширины линии с референтной шириной линии и
- калибровки облучающей системы (18) с целью сфокусировать пучок (22; 22а, 22b) излучения по результатам сравнения измеренной ширины линии и ширины референтной линии.
7. Аппарат по любому из пп. 1-6, в котором модуль (50) управления сконфигурирован для:
- определения формы пятна излучения, формируемого пучком (22; 22а, 22b) излучения, падающего на сенсорный блок (56),
- проведения сравнения определенной формы с референтной формой и
- калибровки облучающей системы (18) с целью компенсировать эллиптическую дисторсию пучка (22; 22а, 22b) излучения по результатам сравнения определенной и референтной форм.
8. Аппарат по любому из пп. 1-7, в котором его облучающая система (18) содержит группу облучающих модулей, причем каждый модуль сконфигурирован для облучения, посредством пучка (22; 22а, 22b) излучения, участка (60, 62) облучаемой плоскости (52), ассоциированного с указанным модулем, и промежуточного участка (64) между смежными облучаемыми участками (60, 62), а модуль (50) управления сконфигурирован для:
- управления группой облучающих модулей (18а, 18b) с обеспечением облучения выбранного промежуточного участка (64) пучками (22а, 22b) излучения согласно соответствующим паттернам калибровки,
- генерирования, на основе сигналов, формируемых сенсорным блоком (56), цифрового изображения фактических паттернов облучения, сформированных пучками (22а, 22b) излучения, падающими на сенсорный блок (56),
- проведения сравнения цифрового изображения фактических паттернов облучения с цифровым изображением соответствующих референтных паттернов с целью выявить расхождения между фактическими и соответствующими им референтными паттернами и
- калибровки облучающих модулей (18а, 18b) на основе выявленных расхождений между фактическими и референтными паттернами.
9. Способ калибровки облучающей системы (18) аппарата (10) для изготовления трехмерного изделия, включающий следующие операции:
- осуществляют управление облучающей системой (18) с обеспечением облучения пучком (22; 22а, 22b) излучения облучаемой плоскости (52) в соответствии с паттерном для калибровки,
- размещают в облучаемой плоскости (52) сенсорный блок (56), который формирует сигналы как результат его облучения пучком (22; 22а, 22b) излучения в соответствии с паттерном для калибровки,
- генерируют, на основе сигналов, формируемых сенсорным блоком (56), цифровое изображение фактического паттерна облучения, обеспечиваемого пучком (22; 22а, 22b) излучения, падающим на сенсорный блок (56),
- сравнивают цифровое изображение фактического паттерна облучения с цифровым изображением референтного паттерна с целью выявить расхождение между фактическим и референтным паттернами и
- калибруют облучающую систему (18) на основе выявленного расхождения между фактическим и референтным паттернами, при этом:
сенсорный блок (56) интегрирован в носитель (16) аппарата (10), на котором в процессе нормального функционирования аппарата (10) находится исходный порошкообразный материал, подлежащий облучению, или
сенсорный блок (56) интегрирован в специальный калибровочный носитель (66), предназначенный для замены, в процессе калибровки облучающей системы (18), указанного носителя (16), на котором в процессе нормального функционирования аппарата (10) находится исходный порошкообразный материал, подлежащий облучению.
10. Способ по п. 9, в котором облучающую систему (18) калибруют, на основе выявленного расхождения между фактическим и референтным паттернами, таким образом, чтобы устранить расхождение между фактическим и референтным паттернами.
11. Способ по п. 9 или 10, в котором:
используют сенсорный блок (56), содержащий группу датчиков (56а), расположенных, с пространственным разделением, в облучаемой плоскости (52), при этом зону детектирования для каждого из датчиков (56а) выбирают таким образом, чтобы обеспечить возможность облучения датчиков (56а) пучком (22; 22а, 22b) излучения, формируемым облучающей системой (18) в соответствии с паттерном для калибровки, даже в случае нарушения калибровки облучающей системы (18), или
используют сенсорный блок (56), содержащий единственный датчик (56b), причем зону детектирования для единственного датчика (56b) выбирают так, чтобы, по существу, покрыть облучаемую плоскость (52).
12. Способ по любому из пп. 9-11, в котором: цифровое изображение референтного паттерна хранят в памяти (58) модуля (50) управления и/или цифровое изображение референтного паттерна и/или цифровое изображение фактического паттерна облучения отображают на дисплейном устройстве, и/или облучающей системой (18) управляют таким образом, чтобы мощность пучка (22; 22а, 22b) излучения, в процессе калибровки облучающей системы (18), была меньше, чем в процессе нормального функционирования аппарата (10).
13. Способ по любому из пп. 9-12, который дополнительно включает следующие операции:
- измеряют ширину линии фактического паттерна облучения, обеспечиваемую пучком (22; 22а, 22b) излучения, падающим на сенсорный блок (56),
- сравнивают измеренную ширину линии с референтной шириной линии и
- калибруют облучающую систему (18) с целью сфокусировать пучок (22; 22а, 22b) излучения по результатам сравнения измеренной шириной линии и ширины референтной линии.
14. Способ по любому из пп. 9-13, который дополнительно включает следующие операции:
- определяют форму пятна излучения, формируемого пучком (22; 22а, 22b) излучения, падающим на сенсорный блок (56),
- сравнивают определенную форму с референтной формой и
- калибруют облучающую систему (18) с целью компенсировать эллиптическую дисторсию пучка (22; 22а, 22b) излучения по результатам сравнения определенной и референтной форм.
15. Способ по любому из пп. 9-14, в котором используют облучающую систему (18) аппарата (10) для изготовления трехмерного изделия, содержащую группу облучающих модулей (18а, 18b), каждый из которых сконфигурирован для облучения пучком (22; 22а, 22b) излучения участка (60, 62) облучаемой плоскости (52), ассоциированного с соответствующим модулем, и промежуточного участка (64) между смежными облучаемыми участками (60, 62), при этом способ включают следующие операции:
- осуществляют управление группой облучающих модулей (18а, 18b) с обеспечением облучения выбранного промежуточного участка (64) пучками (22а, 22b) излучения согласно соответствующим паттернам калибровки,
- генерируют, на основе сигналов, формируемых сенсорным блоком (56), цифровое изображение фактических паттернов облучения, сформированных пучками (22а, 22b) излучения, падающими на сенсорный блок (56),
- сравнивают цифровое изображение фактических паттернов облучения с цифровым изображением соответствующих референтных паттернов с целью выявить расхождения между фактическими и соответствующими им референтными паттернами и
- калибруют облучающие модули (18а, 18b) на основе выявленных расхождений между фактическими и референтными паттернами.
| DE 102009016585 A1, 07.10.2010 | |||
| DE 102013213547 A1, 15.01.2015 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2009 |
|
RU2507032C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ДЛЯ МНОГОЧАСТОТНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2480712C2 |

