Изобретение относится к области информационно-измерительных систем и может быть использовано для измерения дальности, скорости и направления движения объектов по их цифровым видеоизображениям.
Известны лазерные дальномеры [1], содержащие генератор, лазер, приемник излучения, усилитель, измерительный блок. Принцип измерения дальности основан на измерении времени задержки лазерного излучения на дистанции. Недостатком этих дальномеров является сложность конструкции, обусловленная наличием лазера и измерительной схемы, обеспечивающей точность измерения временных интервалов порядка пикосекунд. Такие дальномеры не позволяют одновременно измерять дальность до нескольких объектов, а также видимые габариты объекта и его скорость.
Наиболее близким к предлагаемой системе является измеритель расстояний [2], содержащий цифровую фотокамеру, последовательно соединенную с блоком перемещения фотокамеры по вертикали, вход которого соединен с контроллером, блоком процессора и блоком индикации.
Дальность до выделенной области объекта определяется по сдвигу между изображениями вдоль вертикальной оси. Недостатками этого устройства является невозможность измерения расстояния до движущихся объектов, также устройство не позволяет измерять скорость объектов и отслеживать их перемещение в пространстве.
Достигаемый технический результат заключается в обеспечении возможности измерять расстояние до подвижных и неподвижных объектов с повышенной точностью, а также в расширении функциональных возможностей устройства. Технический результат достигается благодаря использованию цифровой видеокамеры последовательно соединенной с контроллером, блоком анализа видеоизображений, вычислительным блоком, блоком индикации и блоком поворота видеокамеры относительно двух осей вращения, а также визирной цели для крепления к объекту, которая имеет форму шара радиусом R и окрашена в цвет, один из компонентов которого является слабо выраженным, при этом дальность до объекта L(t) в момент времени t определяется из выражения:
где F - фокусное расстояние объектива видеокамеры;
r(t) - радиус визирной цели в пикселях на видеокадре в момент времени t;
pix - физический размер пикселя изображения (на матрице).
Свойства, появляющиеся у заявляемой системы, - это повышение точности измерения расстояния до неподвижных объектов, обусловленное усреднением результатов многократных измерений дальности и расширение функциональных возможностей, обусловленное возможностями вычислительного блока определять скорость объекта и отслеживать его перемещения в пространстве.
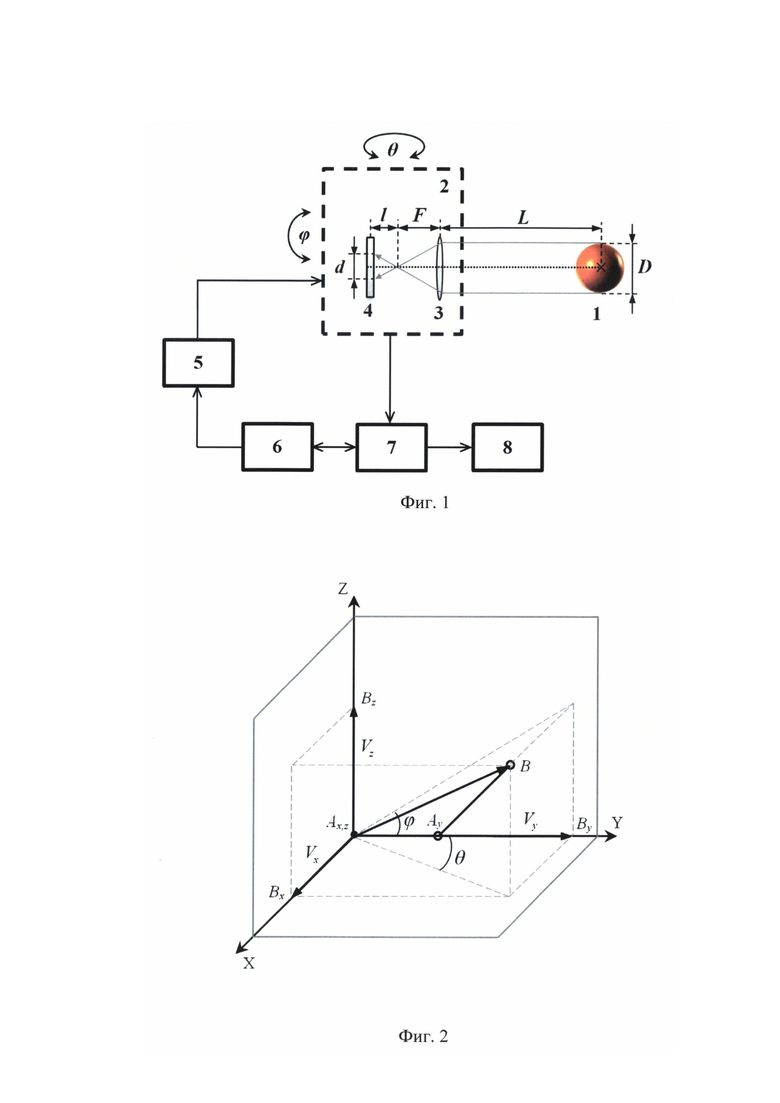
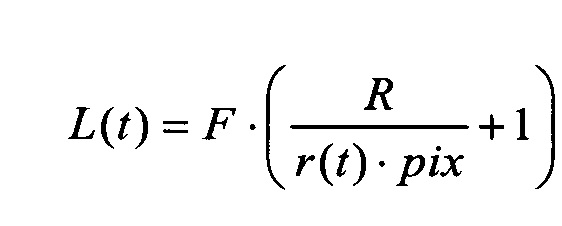
Сущность изобретения поясняется с помощью чертежей, где на фиг. 1 представлена функциональная схема измерителя расстояний на основе цифровой видеокамеры, на фиг. 2 изложен принцип определения скорости и направления движения объекта в пространстве.
Устройство содержит: визирную цель 1, цифровую видеокамеру 2, состоящую из линзы 3 и прибора с зарядовой связью (ПЗС-матрицы) 4, блок наведения видеокамеры 5, контроллер 6, вычислительный блок 7, блок индикации 8.
Измеритель расстояний работает следующим образом. С помощью линзы 3 на ПЗС-матрице 4 формируется цифровое изображение объекта и визирной цели 1, прикрепленной к нему. Затем с помощью контроллера 6, управляющим блоком наведения 5, оптическая ось цифровой видеокамеры 2 направляется на центр визирной цели, совершая наклон на угол ϕ и поворот на угол θ, относительно предыдущих значений. Полученное цифровое изображение визирной цели поступает в вычислительный блок 7, где производится измерение расстояния. Полученные результаты о расстоянии до объекта, его направлении и скорости движения отображаются блоком индикации 8.
Измерение расстояния производится по следующему алгоритму. На отдельном видеокадре выполняется обнаружение визирной цели по ее цвету, который характеризуется одним слабо выраженным компонентом цвета, что позволяет однозначно выделить визирную цель на фоне других объектов. Цвет задается с помощью трехкомпонентного произвольного вектора  , соответственно двухмерная функция, описывающая формируемое видеокамерой цифровое изображение, задается выражением:
, соответственно двухмерная функция, описывающая формируемое видеокамерой цифровое изображение, задается выражением:

где C3 - слабо выраженный компонент цвета.
Затем производится выделение контура визирной цели по максимальным значениям лапласиан:
При этом применяется следующее условие:

где k - пороговый коэффициент.
Полученные участки контура аппроксимируются окружностью по методу наименьших квадратов. Радиус окружности вычисляется из выражения:

где x0, y0 - координаты центра окружности, определяемые с помощью выражений:

где wi, nij - элементы матриц W и N, введенных для упрощения;
det(N) - определитель матрицы N.
Сами матрицы представлены выражениями:
Расстояние до визирной цели в момент времени t определяется из выражения:
где F - фокусное расстояние объектива видеокамеры;
r(t) - радиус визирной цели в пикселях на видеокадре в момент времени t;
pix - физический размер пикселя изображения (на матрице).
Для определения направления и скорости движения определенного объекта на полученном в момент времени ti-1 видеокадре определяют координаты xi-1 и zi-1, центра визирной цели, расположенной на выбранном объекте, который за интервал времени между измерениями Δt=ti-ti-1 -переместился из точки А в точку В (фиг. 2).
В следующий дискретный момент времени ti производится повторное определение координат xi и zi центра визирной цели. Зная расстояния до визирной цели Li-1 и Li в моменты времени ti-1 и ti, а также разность координат на матрице Δx=xi-xi-1 и Δz=zi-zi-1 для этих моментов времени, определяется смещение объекта в пространстве по осям X, Y и Z (фиг. 2):



Затем по составляющим скорости Vx, Vy и Vz вычисляется скорость V объекта:

и направление его движения, выраженное через трехкомпонентный вектор скорости 
Отслеживание перемещений определенного объекта осуществляется блоком наведения, который изменяет углы поворота ϕ и наклона θ видеокамеры, направляя ее оптическую ось на центр визирной цели, прикрепленной к отслеживаемому объекту. Углы поворота и наклона определяются из следующих выражений:

Таким образом, за счет использования визирной цели в форме шара, которую легко обнаружить по цвету на фоне других объектов, повышается точность и достоверность результатов измерений, при этом функциональные возможности измерителя расширяются за счет его способностей определять скорость и направление движения объекта, а также отслеживать перемещение объекта в пространстве благодаря наличию в составе системы блока наведения видеокамеры.
Источники информации
1. Лазерная дальнометрия / Под ред. В.П. Васильева. - М.: Радио и связь, 1995. - С. 256.
2. Патент Республики Беларусь «Измеритель расстояний на цифровой фотокамере» №8358 от 20.12.2011. МПК G01C 3/00, опубликовано 30.06.2012.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ НА ЦИФРОВОЙ ВИДЕОКАМЕРЕ С ПОМОЩЬЮ МИШЕНИ | 2017 |
|
RU2655467C1 |
| Способ измерения дальности до вагона с помощью видеокамеры | 2023 |
|
RU2811525C1 |
| Способ измерения дальности от маневрового тепловоза до вагона на прямолинейном участке железнодорожного пути | 2020 |
|
RU2750364C1 |
| Способ косвенного измерения дальности от маневрового тепловоза до вагона на прямолинейном участке железнодорожного пути | 2019 |
|
RU2729512C1 |
| Способ измерения дальности до вагона на прямолинейном участке железнодорожного пути | 2021 |
|
RU2769453C1 |
| СПОСОБ ПРИМЕНЕНИЯ РОБОТИЗИРОВАННОГО ТАХЕОМЕТРА И БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНОГО ОБЪЕКТА | 2023 |
|
RU2809177C1 |
| Видеограмметрическая система для определения собственных координат по трем источникам света | 2022 |
|
RU2779703C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2012 |
|
RU2513900C1 |
| Способ определения собственных координат по трем визирным целям и видеограмметрическая система для его осуществления | 2021 |
|
RU2769637C1 |
Изобретение относится к области информационно-измерительных систем и может быть использовано для измерения дальности, скорости и направления движения подвижных и неподвижных объектов по их цифровым видеоизображениям. Заявлен измеритель расстояний на основе цифровой видеокамеры, последовательно соединенной с контроллером, блоком анализа видеоизображений, вычислительным блоком, блоком индикации и блоком поворота видеокамеры относительно двух осей вращения, а также используется визирная цель для крепления к объекту, которая имеет форму шара радиусом R и окрашена в цвет, один из компонентов которого является слабо выраженным, при этом дальность до объекта L(t) в момент времени t определяется из выражения:
 ,
,
где F - фокусное расстояние объектива видеокамеры; r(t) - радиус визирной цели в пикселях на видеокадре в момент времени t; pix - физический размер пикселя изображения (на матрице). Технический результат – обеспечение возможности измерять расстояние до подвижных и неподвижных объектов с повышенной точностью, а также расширение функциональных возможностей. 2 ил.
Измеритель расстояний на основе цифровой видеокамеры, последовательно соединенной с контроллером, блоком анализа видеоизображений, вычислительным блоком, блоком индикации и блоком поворота видеокамеры относительно двух осей вращения, отличающийся тем, что в заявленной системе используется визирная цель для крепления к объекту, которая имеет форму шара радиусом R и окрашена в цвет, один из компонентов которого является слабо выраженным, при этом дальность до объекта L(t) в момент времени t определяется из выражения:
где F - фокусное расстояние объектива видеокамеры;
r(t) - радиус визирной цели в пикселях на видеокадре в момент времени t;
pix - физический размер пикселя изображения (на матрице).
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТЕЙ ДО ОБЪЕКТОВ ПО ИЗОБРАЖЕНИЯМ С ЦИФРОВЫХ ВИДЕОКАМЕР | 2016 |
|
RU2626051C2 |
| МАНОМЕТР | 1929 |
|
SU17809A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЙ НА ЦИФРОВОЙ ФОТОКАМЕРЕ | 2011 |
|
RU2485443C1 |
| BY 17794 C1, 30.12.2013 | |||
| US 5432594 A1, 11.07.1995 | |||
| US 5751409 A1, 12.05.1998 | |||
| US 5131740 A1, 21.07.1992. | |||

