Заявляемые объекты объединены единым изобретательским замыслом, относятся к области радиотехники, а именно к пассивной локации, и могут быть использованы в навигационных, пеленгационных, локационных средствах для визуального обнаружения и определения координат априорно неизвестных объектов с летно-подъемных средств (ЛПС).
Известны способы определения координат подвижных и неподвижных объектов по пат. РФ 2251712 и пат. РФ 2154284, обеспечивающие определение координат объектов с помощью оптико-электронных устройств. Они предполагают определение угловой координаты изображения объекта вместе с изменяющими образ элементами в поле зрения с последующим пересчетом полученной величины в стабилизированную систему координат, определение величины и направления линейной скорости объекта в стабилизированной системе координат, формирование величины углового смещения в стабилизированной картинной плоскости исходя из полученной величины и координат, характеризующих линейное смещение изменяющих образ элементов относительно собственной системы координат объекта, и корректирование угловой координаты изображения объекта вместе с искажающими образ элементами в стабилизированной системе координат на величину углового смещения. Однако названные системы обладают существенным недостатком. Способы-аналоги реализуются на земной поверхности и обладают малым радиусом действия.
Известен способ по пат. РФ 2323851, МПК B64C 31/06, опубл. 10.05.2008 г. Аналог предполагает использование беспилотного летательного аппарата (БПЛА) в совокупности с видеокамерой. Аналог обеспечивает фотографирование земной поверхности под управлением наземного поста.
Аналог также обладает недостатком, связанным с отсутствием возможности определения координат обнаруженных объектов.
Наиболее близким по технической сущности является способ определения местоположения источника радиоизлучений по пат. РФ №2465613, МПК G01S 3/14, опубл. 27.10.2012 г.
Способ-прототип на подготовительном этапе включает установку под фюзеляжем ЛПС видеокамеры, определение ориентации видеокамеры и антенной системы (АС) пеленгатора относительно борта ЛПС (kk, lk, ζk), (kant, lant, ζant), где kk, lk, ζk, kant, lant, ζant - соответственно углы крена, тангажа и склонения видеокамеры и АС, а в процессе полета постоянное через заданный интервал времени Δt определение местоположения ЛПС (Blps, Llps, Hlps)i,
где 


















Способ позволяет с помощью видеокамеры и радиопеленгатора по радиоизлучениям определить местоположение ИРИ. Использование в прототипе видеокамеры повышает точностные характеристики измерителя.
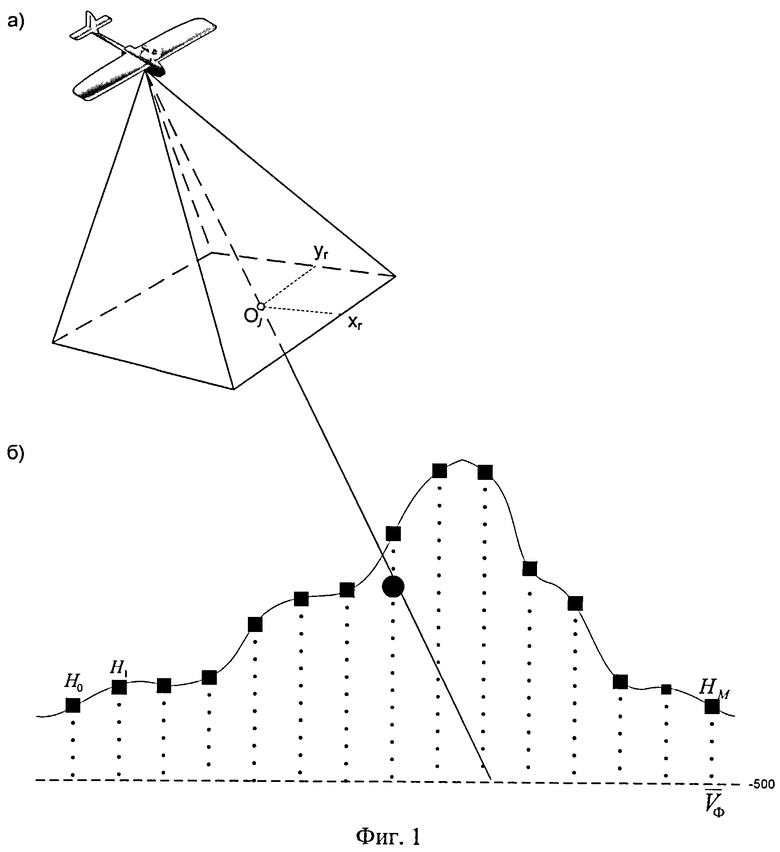
Способу-прототипу также присущ недостаток, связанный с относительно низкой точностью определения координат объектов. На практике, как правило, интерес представляет не сам источник радиоизлучения, а объект, на котором (или в котором) он размещается. В ситуации, когда ИРИ на объекте находится в выключенном состоянии, прототип теряет свою работоспособность. Кроме того, ИРИ часто выносят за пределы объекта, что также усугубляет ситуацию. Низкая точность измерений объясняется тем, что в видеокамере наблюдается достаточно большая площадь земной поверхности, много превышающая площадь объекта, что и влечет за собой ошибки в определении его координат (см. фиг.1а).
Целью заявляемого технического решения является повышение точности определения координат объекта с борта ЛПС.
Поставленная цель достигается тем, что в известном способе определения координат объектов, заключающемся в том, что на подготовительном этапе на борт летно-подъемного средства (ЛПС) под фюзеляжем устанавливают видеокамеру, определяют ориентацию видеокамеры относительно борта ЛПС (kk, lk, ζk), где kk, lk, ζk - соответственно углы крена, тангажа и склонения видеокамеры, а в процессе полета постоянно через заданный интервал времени Δt определяют местоположение ЛПС (Blps,
Llps, Hlps), где









Координаты j-го объекта (хr, уr)j в кадре определяют в пикселях, отсчитанных от верхнего левого угла кадра видеокамеры.
Переход от координат j-го объекта в кадре к уточненному предварительному вектору направления на него
где 

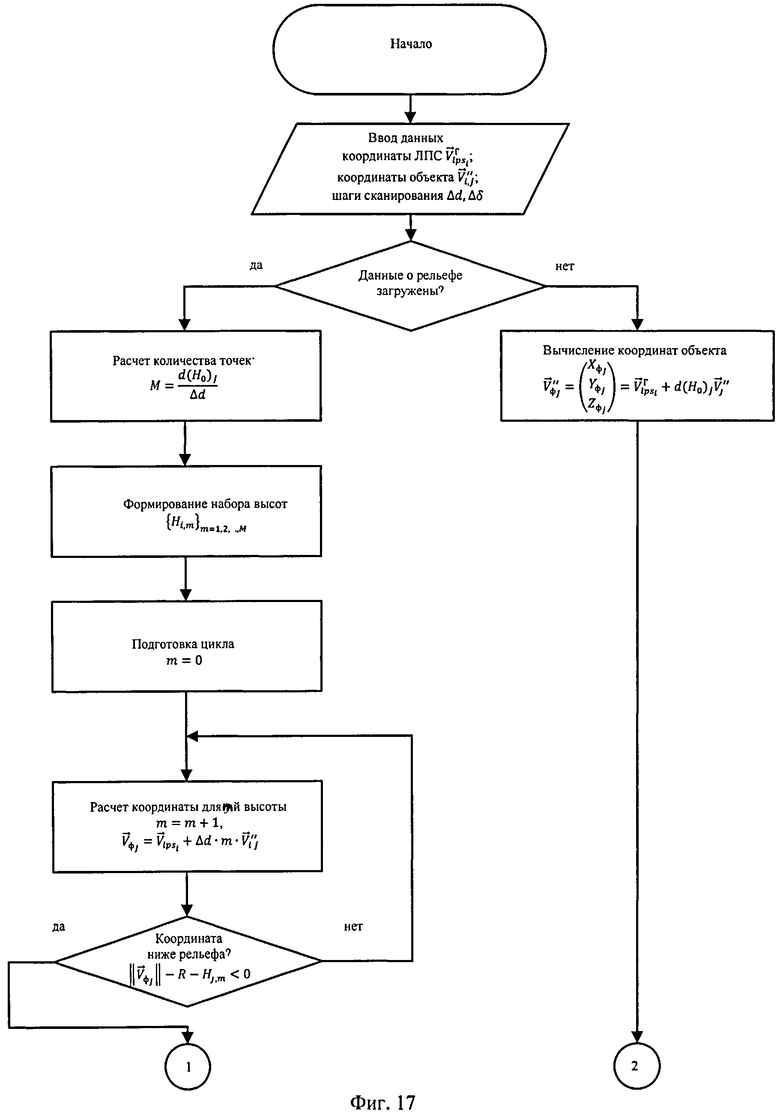
При наличии цифровой карты рельефа местности района измерений формируют последовательный набор значений высот {Hi,m}, m=1, 2, …, М, который соответствует равномерно распределенным координатам на отрезке, соединяющем координаты (Blps, Llps) и (Bj, Lj), М=d(H0)/Δd, где Δd - шаг сканирования по вектору направления




Благодаря новой совокупности признаков в заявляемом способе достигается более точное измерение предварительного вектора
Известны устройства по пат. РФ №2251712, МПК G01S 13/66; пат. РФ №2359288, МПК G01S 5/02. Аналоги обеспечивают определение координат объектов с помощью оптико-электронных средств. Однако им присущ существенный недостаток: они размещаются на земной поверхности, вследствие чего обладают маленьким радиусом действия.
Наиболее близким по своей технической сущности к заявляемому устройству определения координат объектов является пат. РФ №2323851, МПК B64C 31/06 "Система наблюдения за земной поверхностью с беспилотным летательным аппаратом", опубл. 10.05.2008 г.
Устройство-прототип содержит затягивающую лебедку, беспилотный летательный аппарат (БЛА) и наземный пункт управления (НПУ), причем БЛА состоит из последовательно соединенных контроллера, рулевого привода и аэродинамических рулей, автопилота, группа информационных входов которого соединена с второй группой информационных выходов контроллера, первая группа информационных входов которого соединена с группой информационных выходов автопилота, двигательная установка, группа информационных входов которой соединена с третьей группой информационных выходов контроллера, блок видеонаблюдения, группа информационных входов которого соединена с четвертой группой информационных выходов контроллера, а группа информационных выходов - с второй группой информационных входов контроллера, и первый приемопередающий модуль, группа информационных входов которого соединена с пятой группой информационных выходов контроллера, третья группа информационных входов которого соединена с группой информационных выходов первого приемо-передающего модуля, а наземный пункт управления выполнен содержащим последовательно соединенные блок управления, второй приемо-передающий модуль и устройство обработки и отображения информации, вторая группа выходов блока управления является шиной управления НПУ, и соединена с затягивающей лебедкой.
Прототип предназначен для получения фотоснимков земной поверхности с высоты порядка 100 метров. Однако устройство-прототип не обеспечивает измерение координат видимых объектов из-за отсутствия высокоточной системы навигации БЛА и высокоточной системы определения направления на него.
Целью заявляемого технического решения является разработка устройства, обеспечивающего высокоточное измерение координат заданных объектов с борта БЛА.
Поставленная цель достигается тем, что в известном устройстве, состоящем из беспилотного летательного аппарата и наземного пункта управления, причем БЛА выполнен содержащим последовательно соединенные контроллер, рулевой привод и аэродинамические рули, автопилот, группа информационных входов которого соединена с второй группой информационных выходов контроллера, первая группа информационных входов которого соединена с группа информационных выходов автопилота, двигательная установка, группа информационных входов которой соединена с третьей группой информационных выходов контроллера, первый приемопередающий модуль, группа информационных входов которого соединена с четвертой группой информационных выходов контроллера, вторая группа информационных входов которого соединена с группой информационных выходов первого приемо-передающего модуля, и блок видеонаблюдения, а наземный пункт управления выполнен содержащим последовательно соединенные первый блок управления, второй приемо-передающий модуль и первое устройство обработки и отображения информации, отличающееся тем, что в БЛА дополнительно введены передающий модуль, блок навигации БЛА и запоминающее устройство, причем, первая группа информационных входов запоминающего устройства соединена с группой информационных выходов блока видеонаблюдения, вторая группа информационных входов соединена с группой информационных выходов блока навигации БЛА, а группа информационных выходов запоминающего устройства соединена с группой информационных входов передающего модуля, а в наземный пункт управления дополнительно введены последовательно соединенные приемный модуль и второе устройство обработки и индикации, второй блок управления, группа информационных входов которого объединена с первой группой информационных входов второго устройства обработки и отображения информации, а группа информационных выходов - со второй группой информационных входов второго устройства обработки и отображения информации.
Перечисленная новая совокупность существенных признаков за счет того, что водятся новые элементы и связи, позволяет достичь цели изобретения: обеспечить высокоточное измерение координат заданных объектов за счет полного и объективного измерения пространственных параметров БЛА, углов ориентации видеокамеры и места объекта в кадре в условиях воздействия дестабилизирующих факторов (ветровой нагрузки, выполнения маневров БЛА и др.) и учету особенностей рельефа местности.
Заявляемые объекты поясняются чертежами, на которых показаны:
на фиг.1 иллюстрируются:
а) пятно засветки видеокамеры на земной поверхности с находящимся в нем объектом Оj;
б) причина возникновения ошибок в определении координат объекта при отсутствии учета рельефа местности;
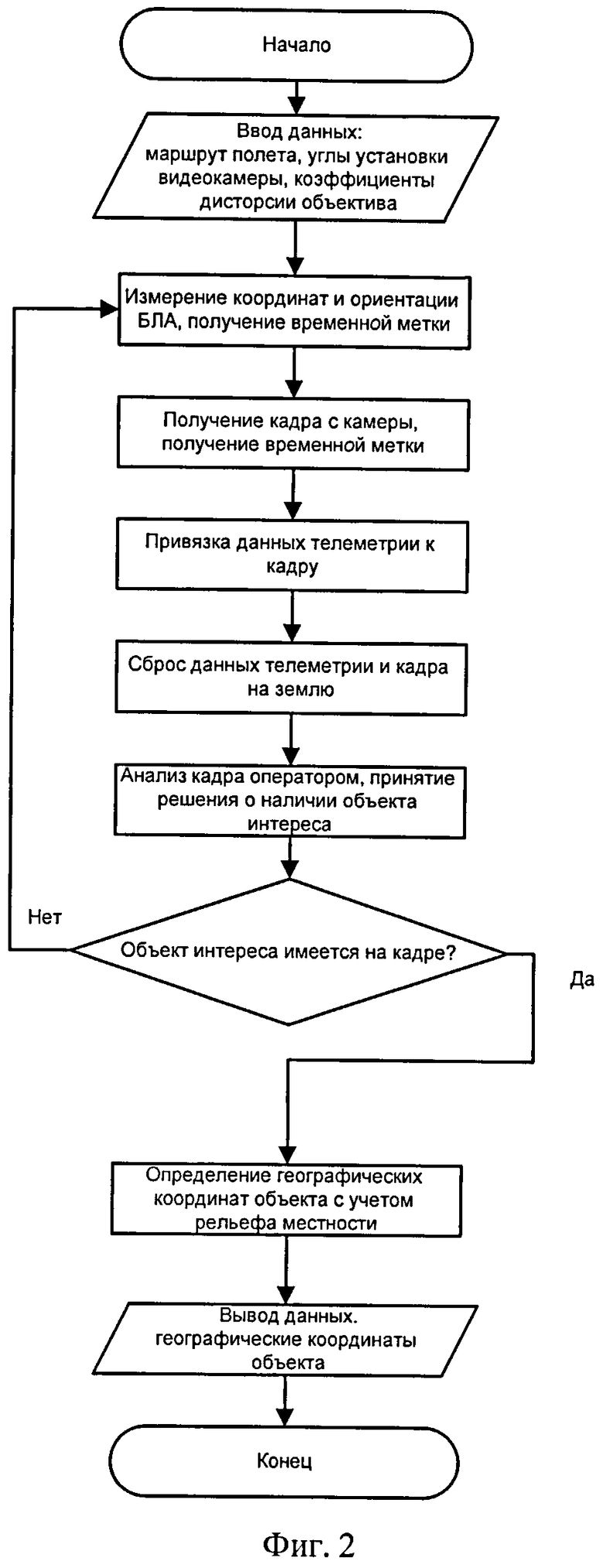
на фиг.2 показан обобщенный алгоритм определения координат объекта;
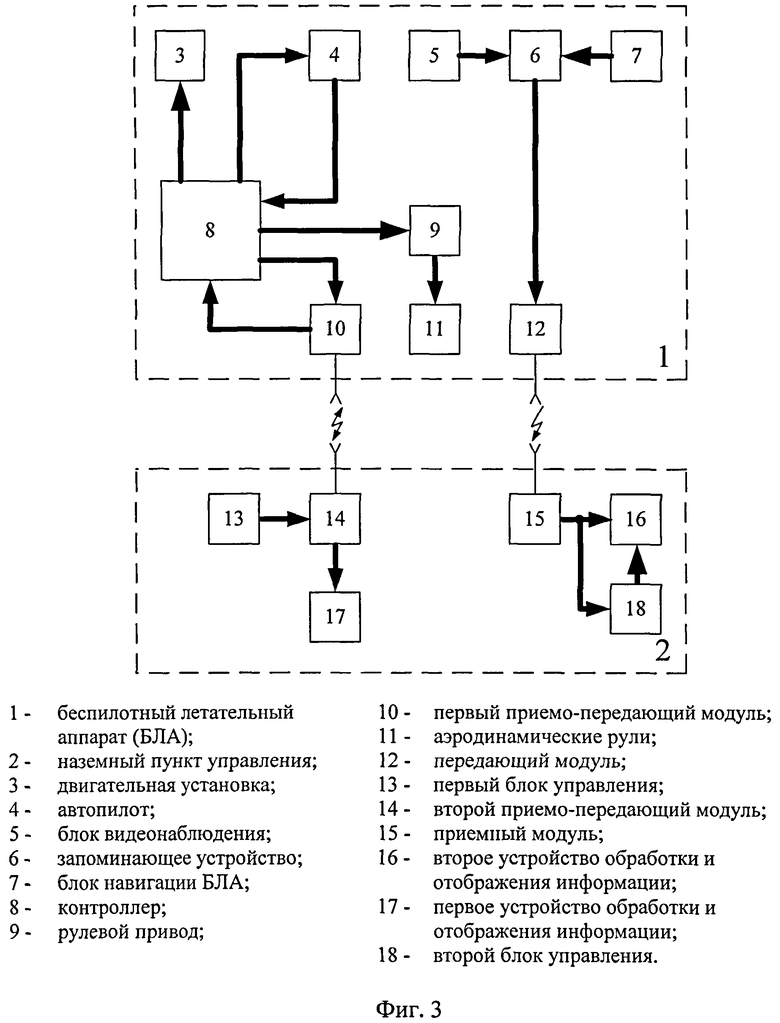
на фиг.3 приведена обобщенная структурная схема устройства определения координат объекта;
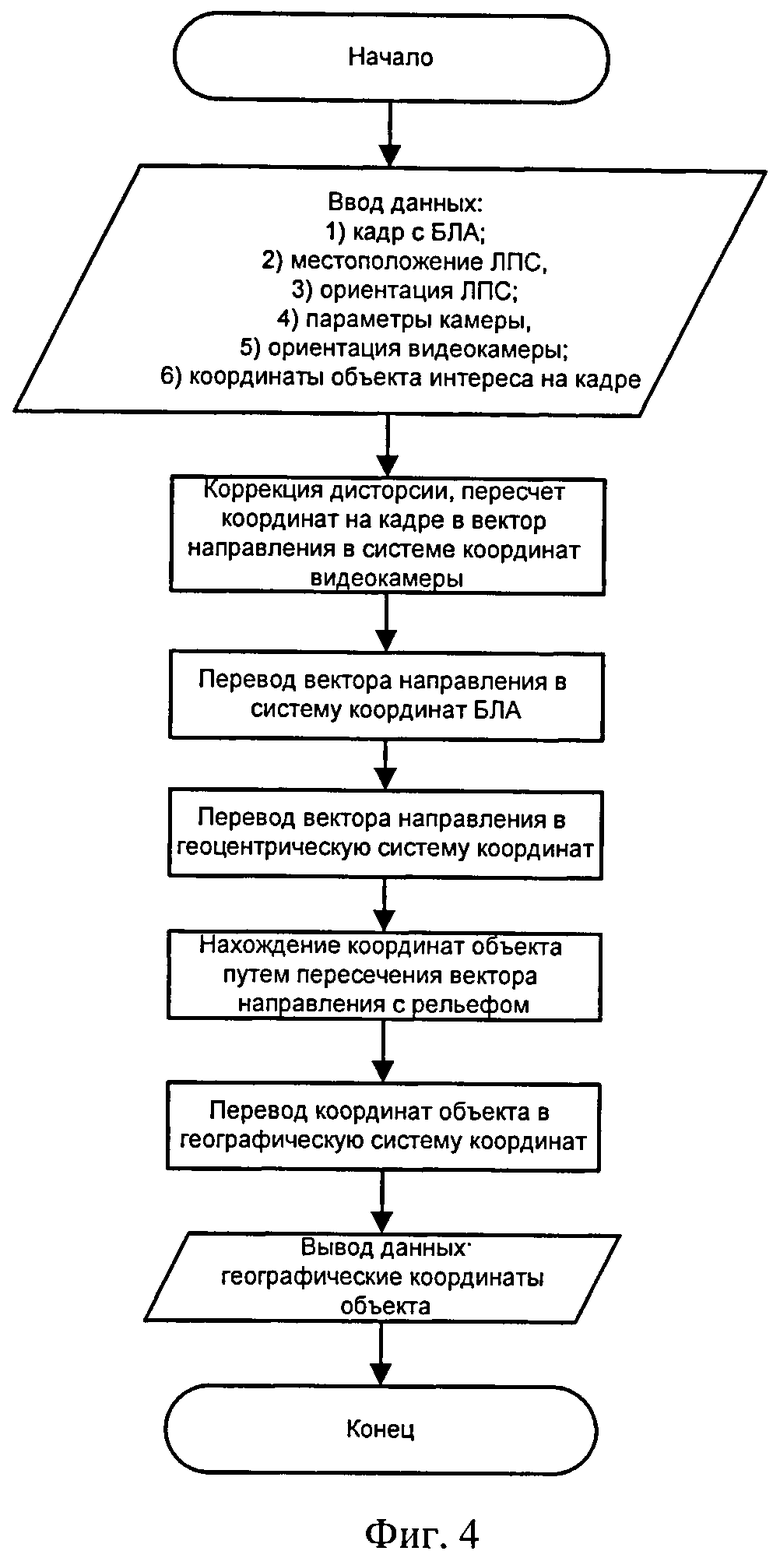
на фиг.4 показан алгоритм определения координат объекта (B, L, H)j в географической системе координат по одному кадру;
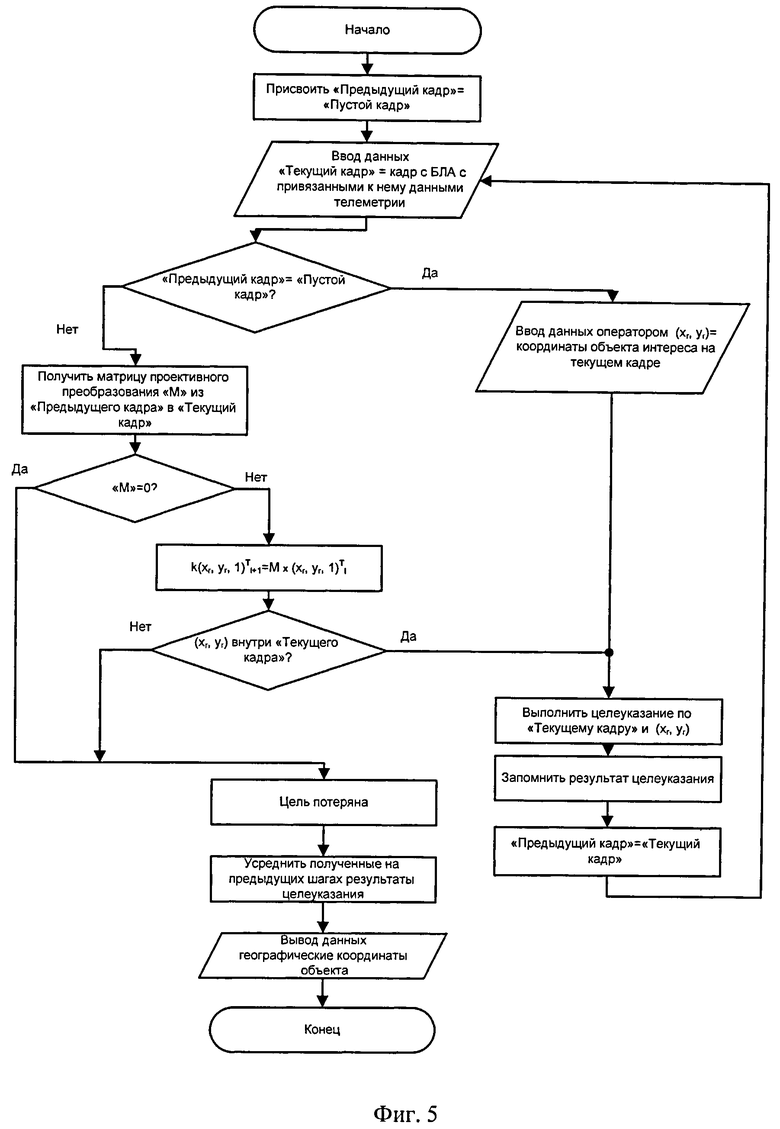
на фиг.5 иллюстрируется алгоритм нахождения координат объекта [B, L, H)j в географической системе координат по серии кадров;
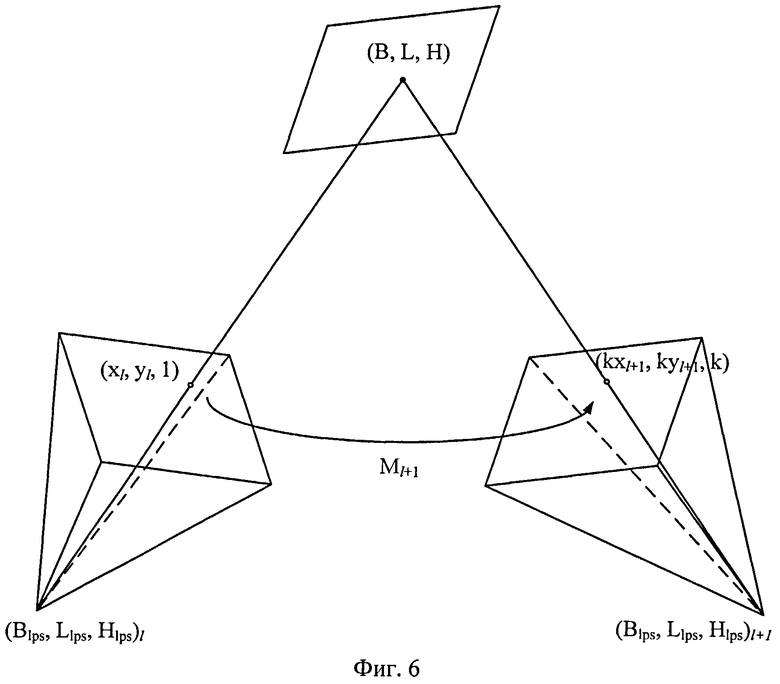
на фиг.6 иллюстрируется съемка плоской поверхности с двух разных положений видеокамеры;
на фиг.7 поясняется порядок предварительного определения координат объекта;
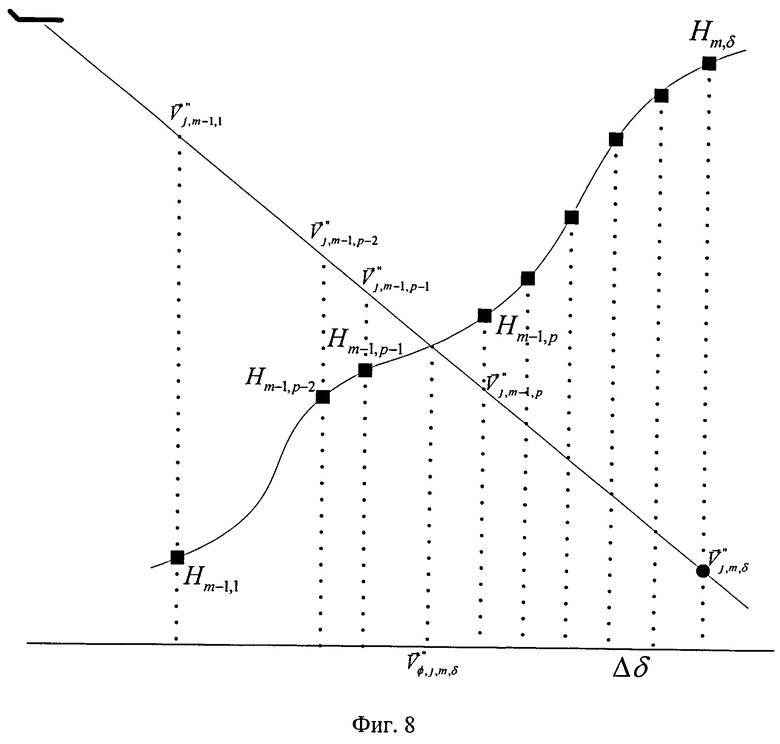
на фиг.8 поясняется порядок определения координат объекта с заданной точностью;
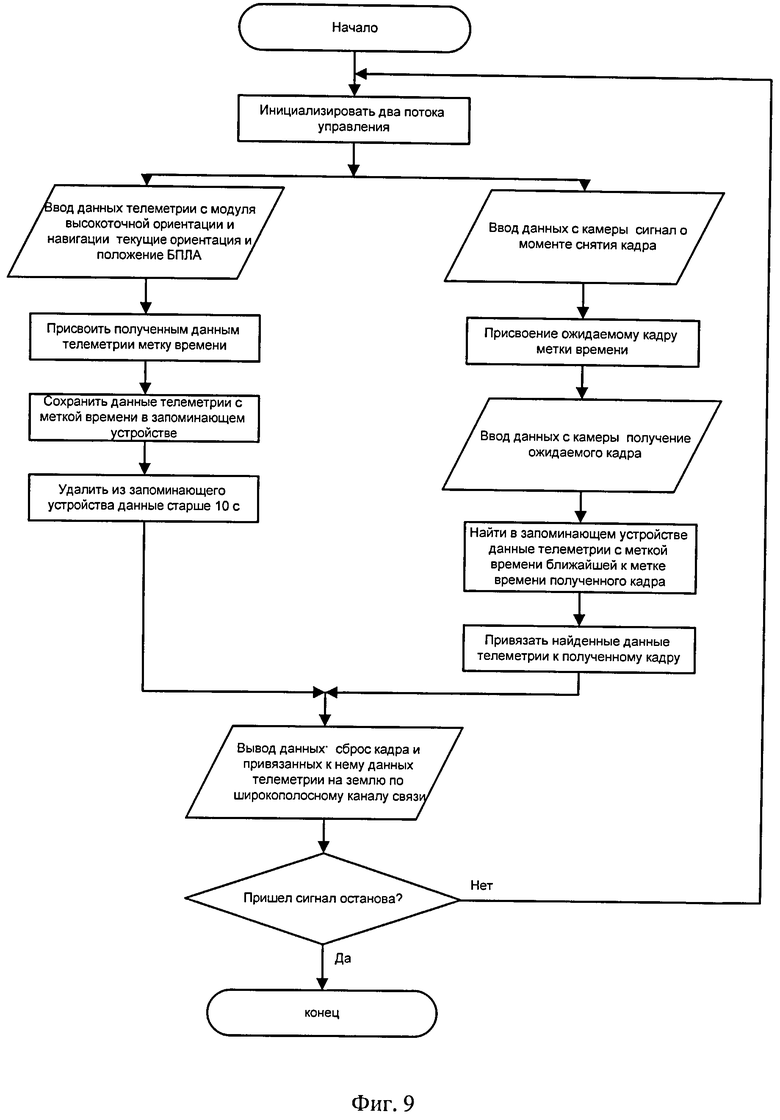
на фиг.9 приведен алгоритм работы подсистемы видеонаблюдения, размещаемой на борту БЛА;
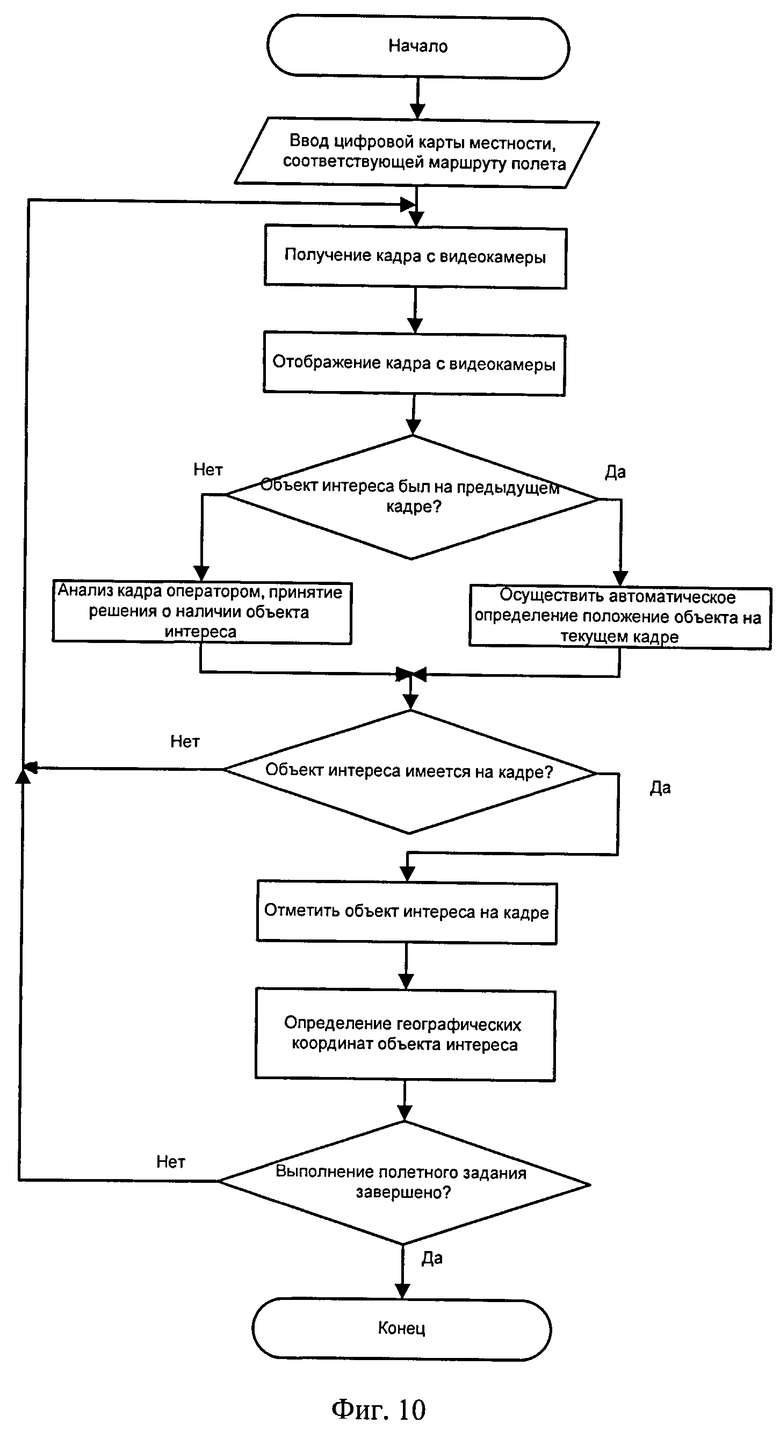
на фиг.10 показан алгоритм работы второго автоматизированного рабочего места наземного пункта управления;
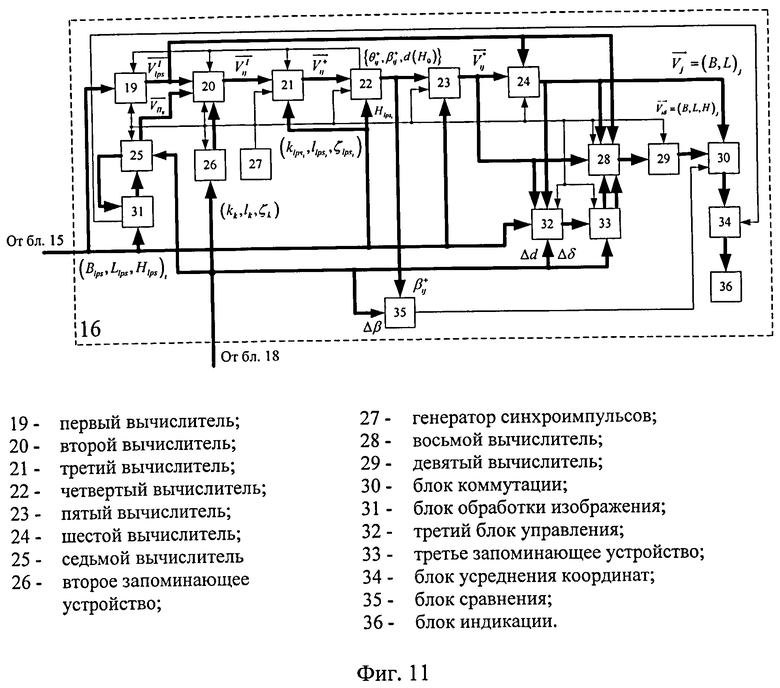
на фиг.11 иллюстрируется структурная схема второго устройства обработки и отображения информации;
на фиг.12 приведена структурная схема седьмого вычислителя;
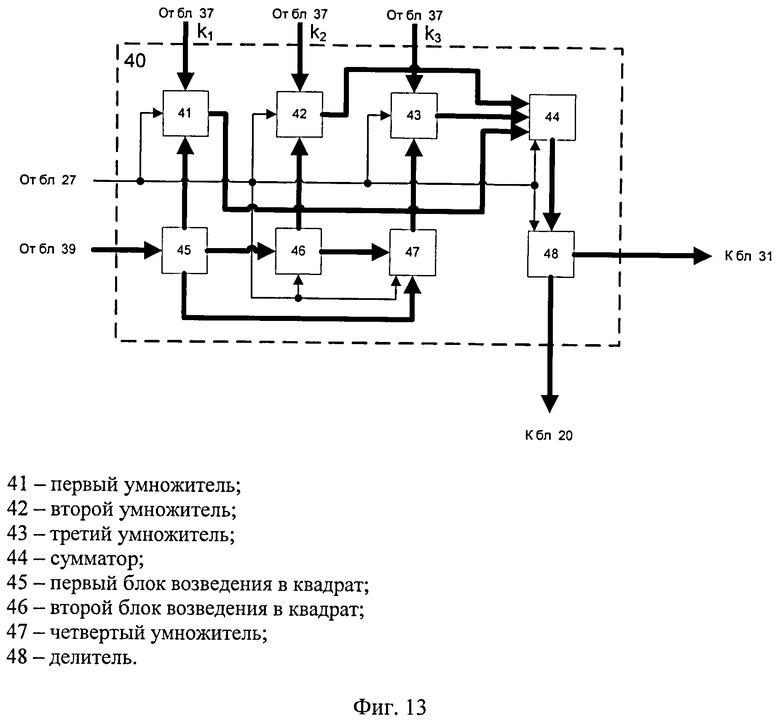
на фиг.13 показана структурная схема блока коррекции дисторсии объектива видеокамеры;
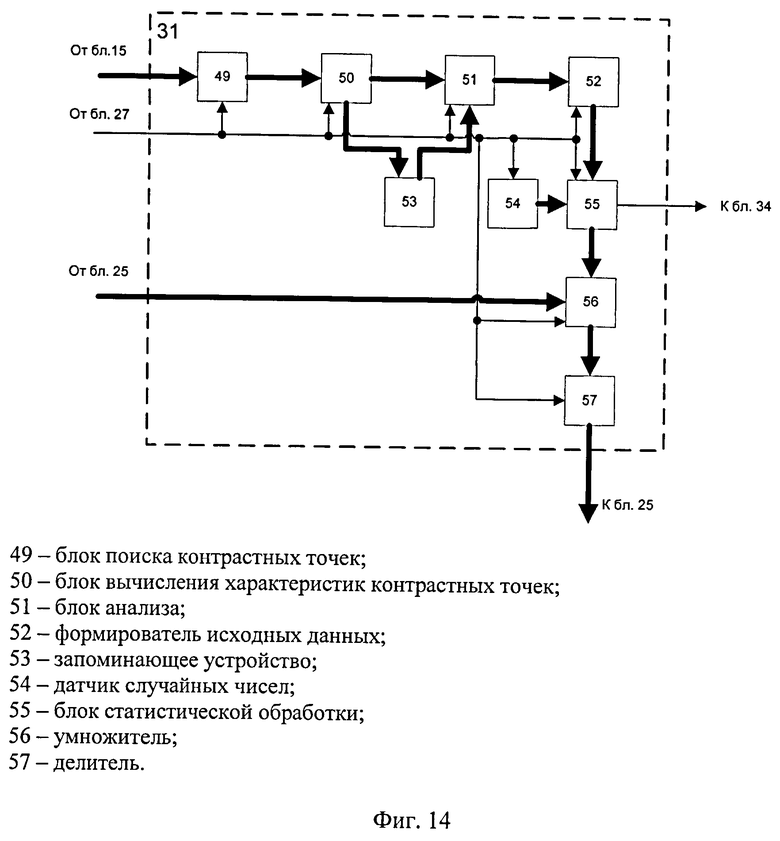
на фиг.14 приведена структурная схема блока обработки изображения;
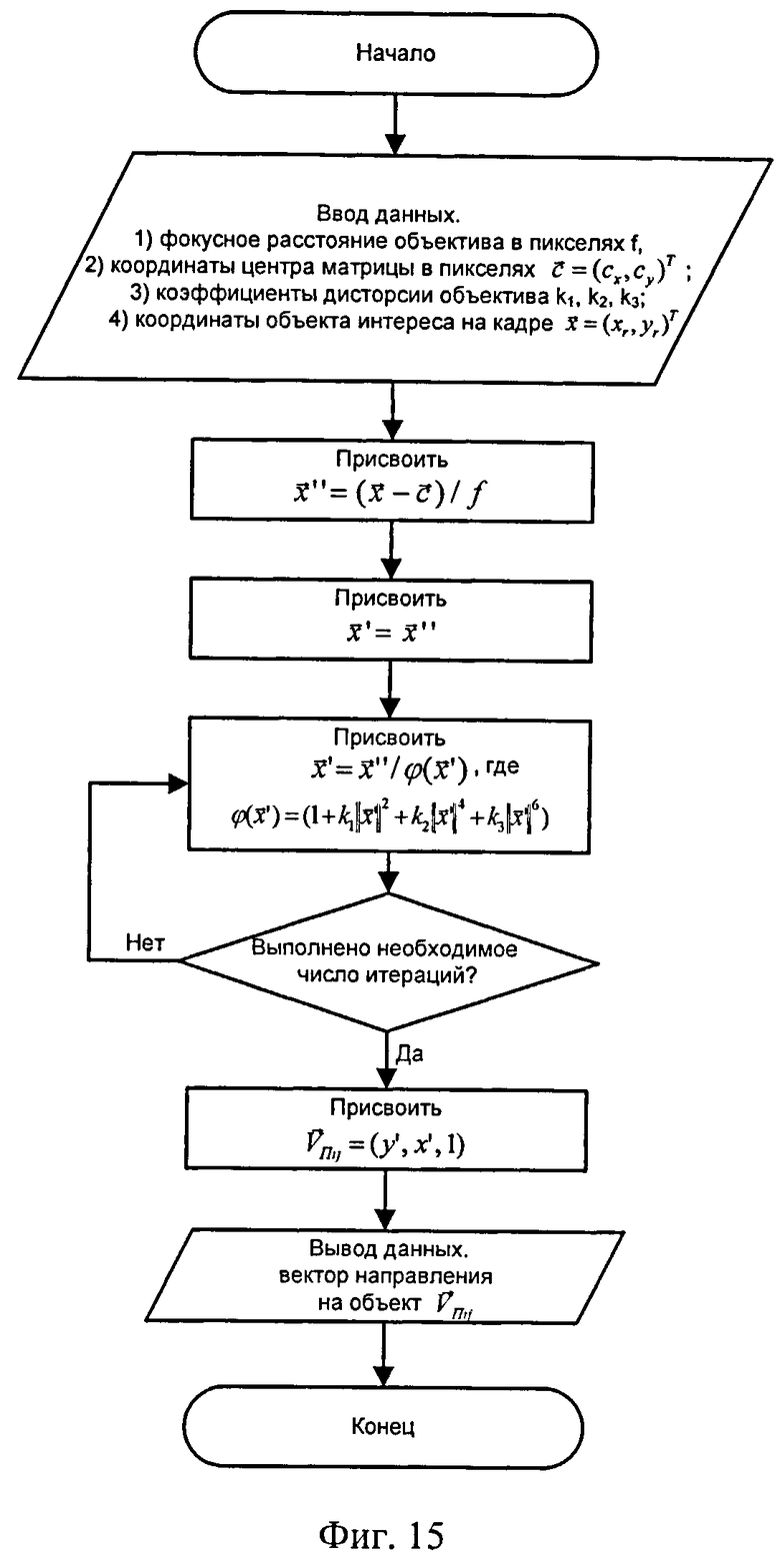
на фиг.15 иллюстрируется алгоритм работы седьмого вычислителя по определению вектора направления на объект в системе координат видеокамеры;
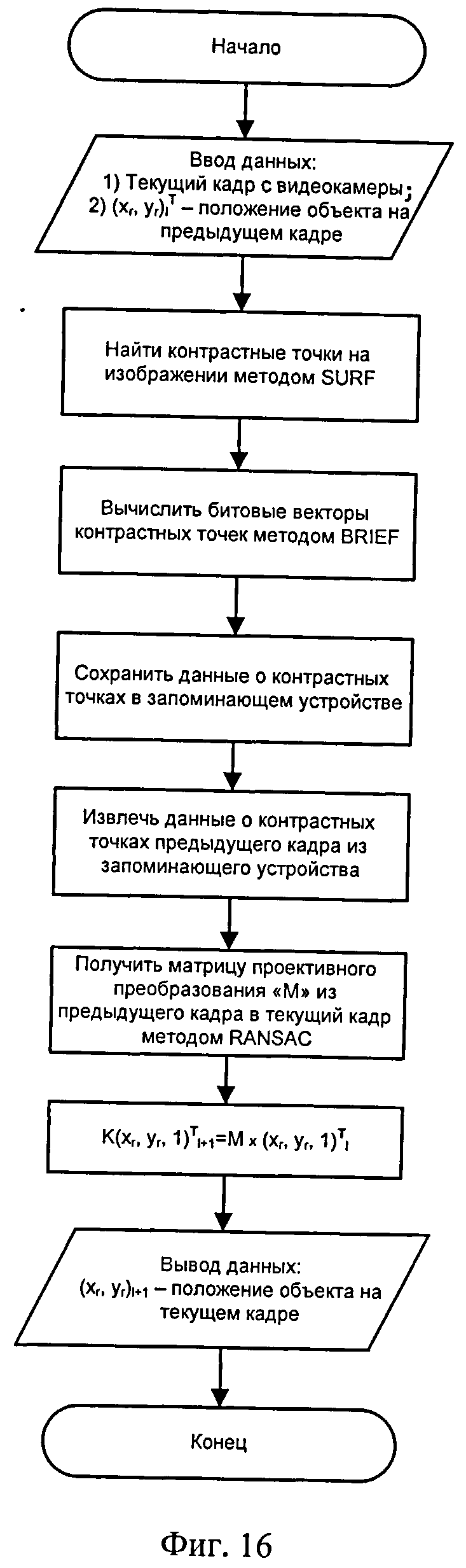
на фиг.16 показан алгоритм работы блока обработки видеоизображения;
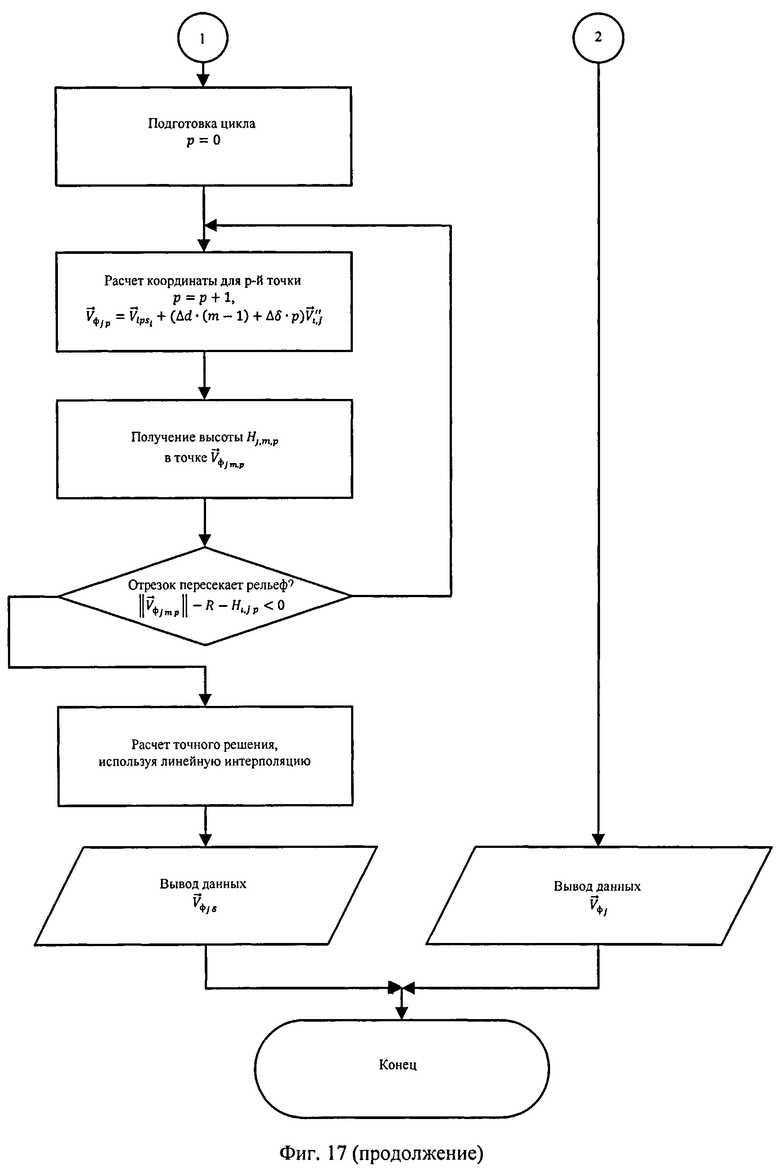
на фиг.17 приведен алгоритм работы восьмого вычислителя;
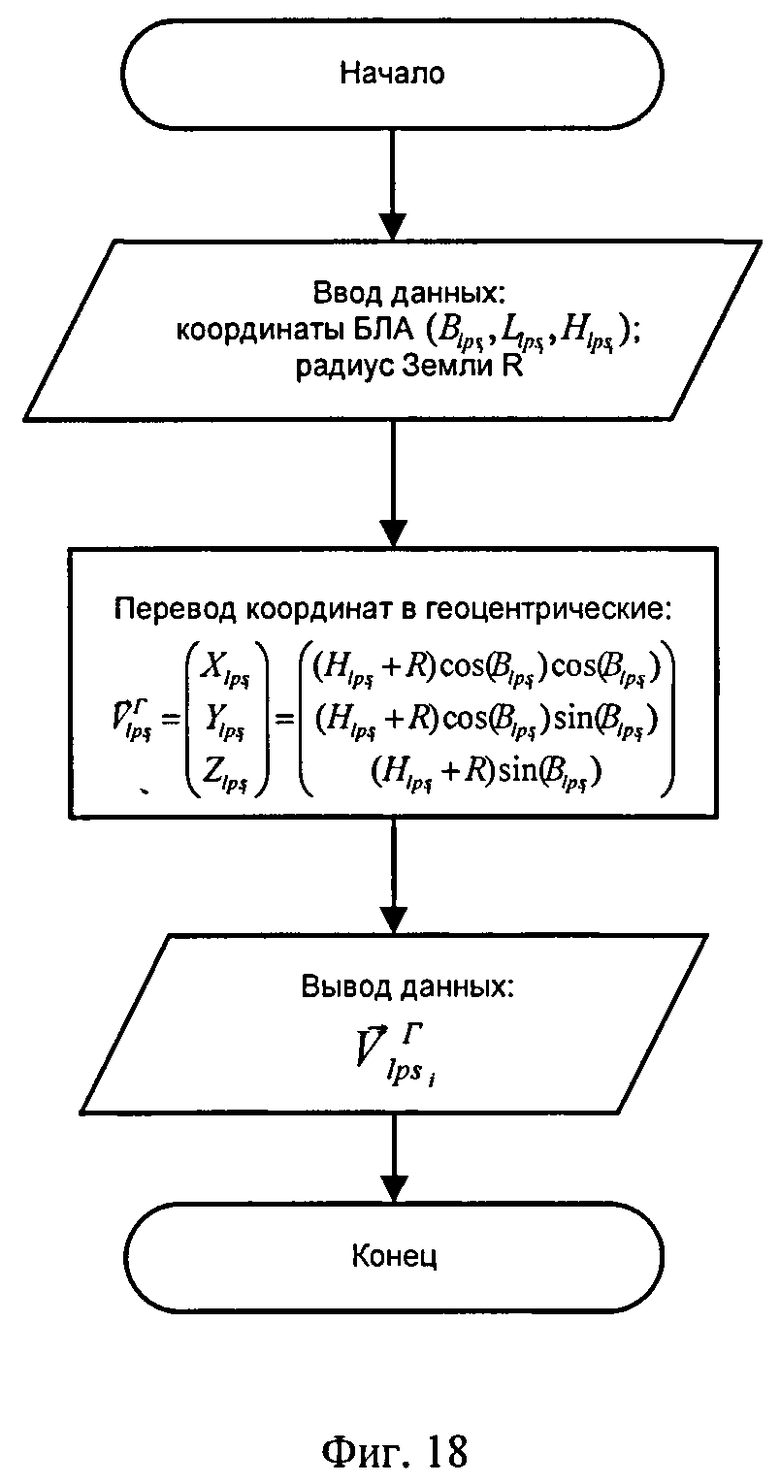
на фиг.18 показан алгоритм работы первого вычислителя;
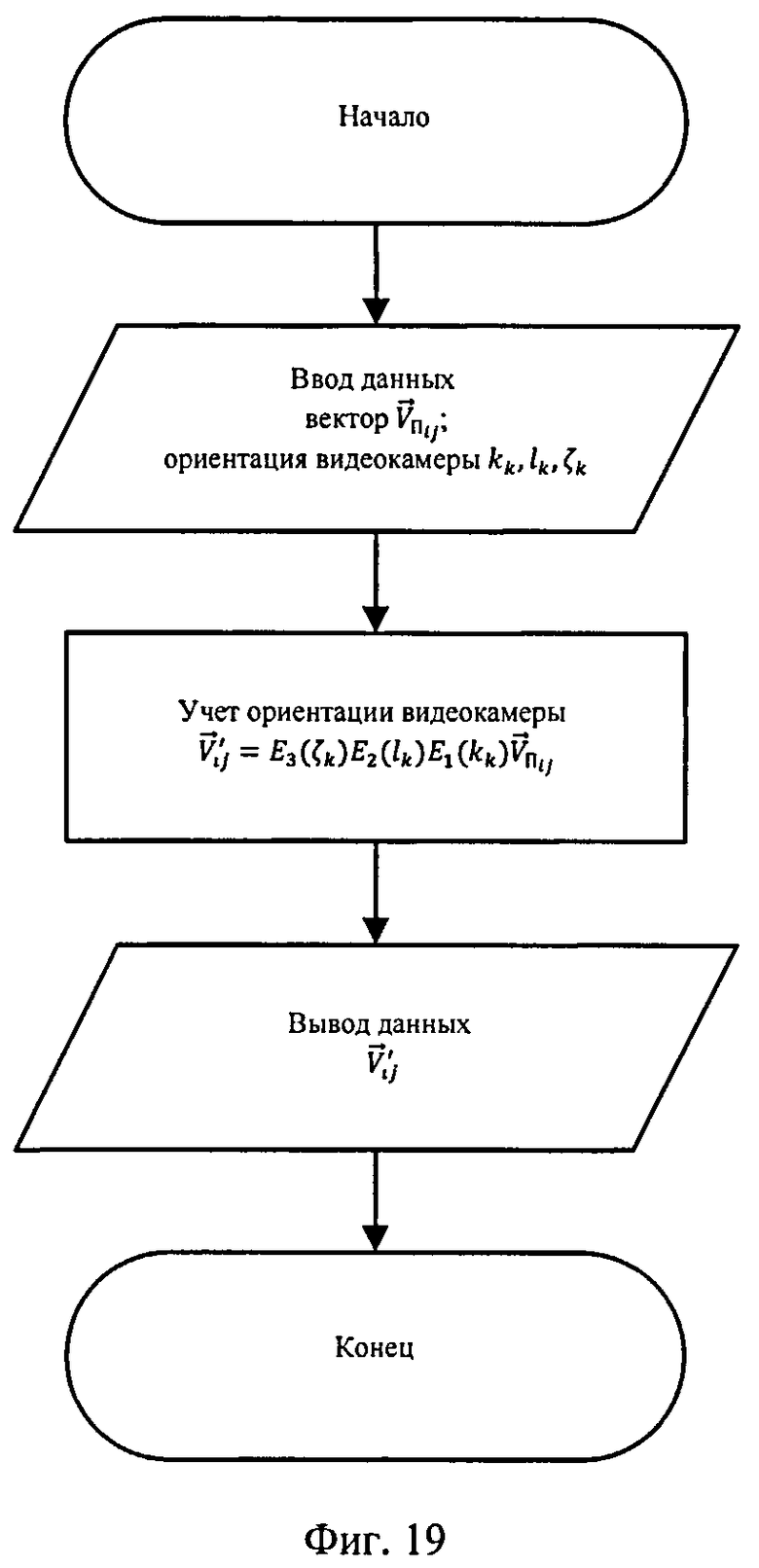
на фиг.19 приведен алгоритм работы второго вычислителя;
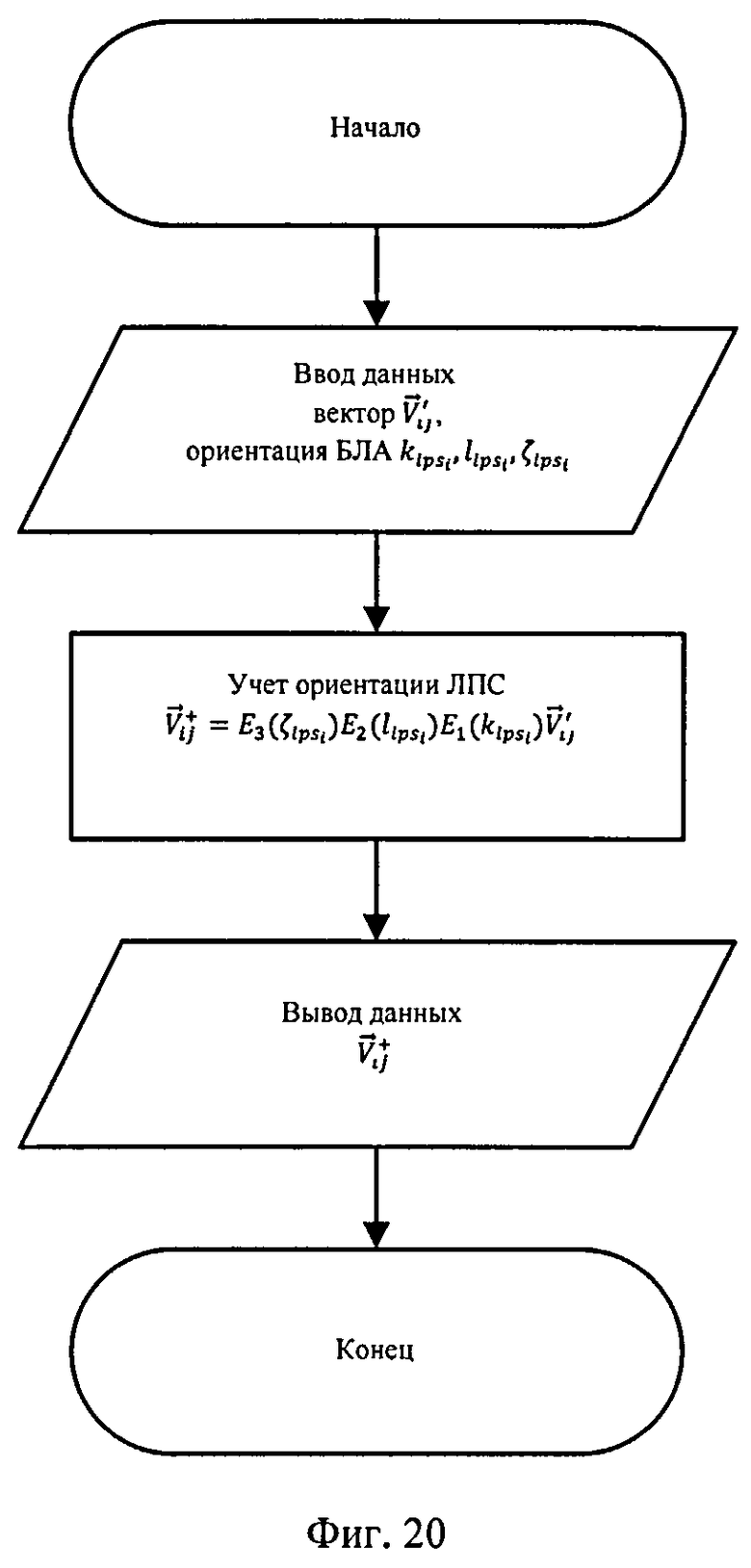
на фиг.20 иллюстрируется алгоритм работы третьего вычислителя;
на фиг.21 приведен алгоритм работы четвертого вычислителя;
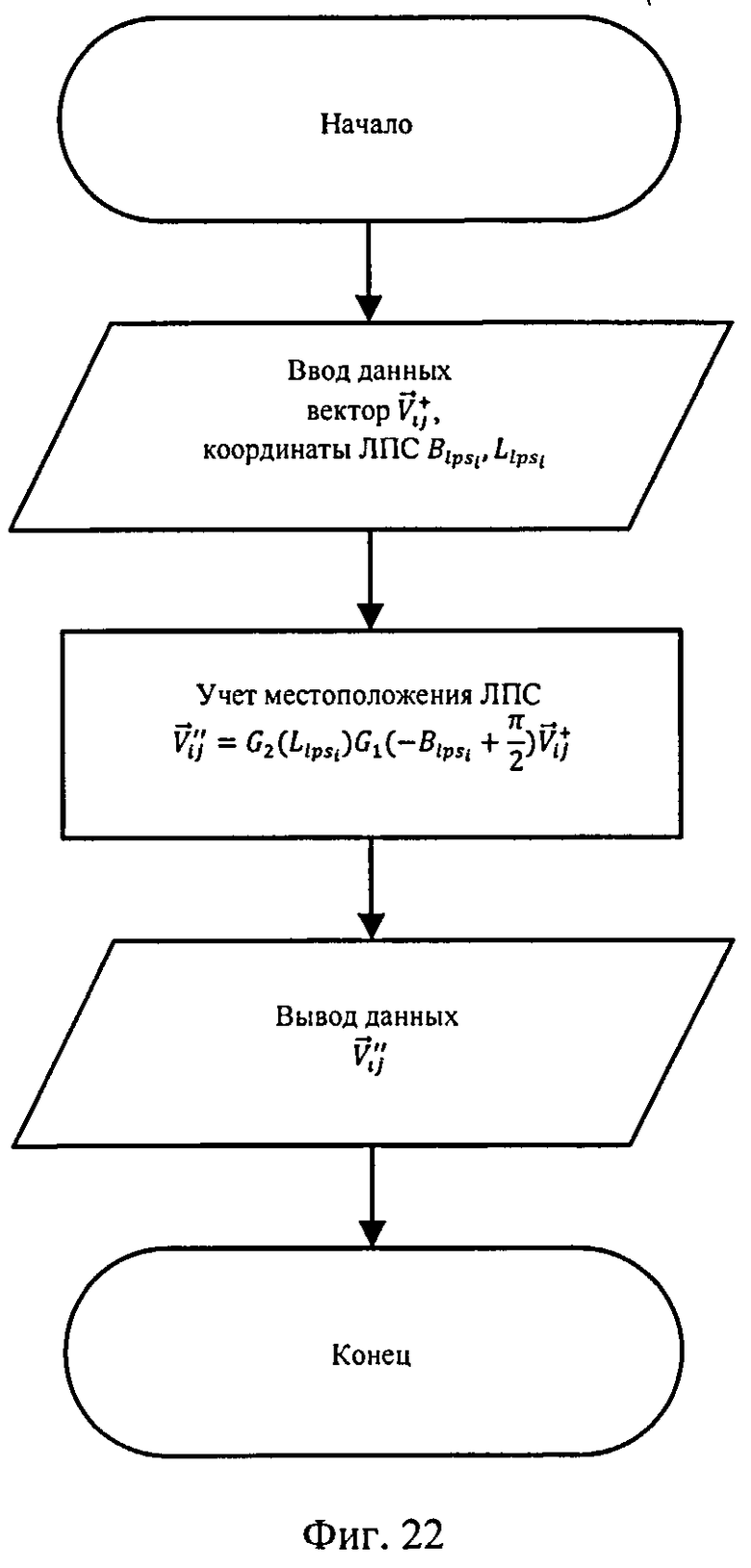
на фиг.22 приведен алгоритм работы пятого вычислителя;
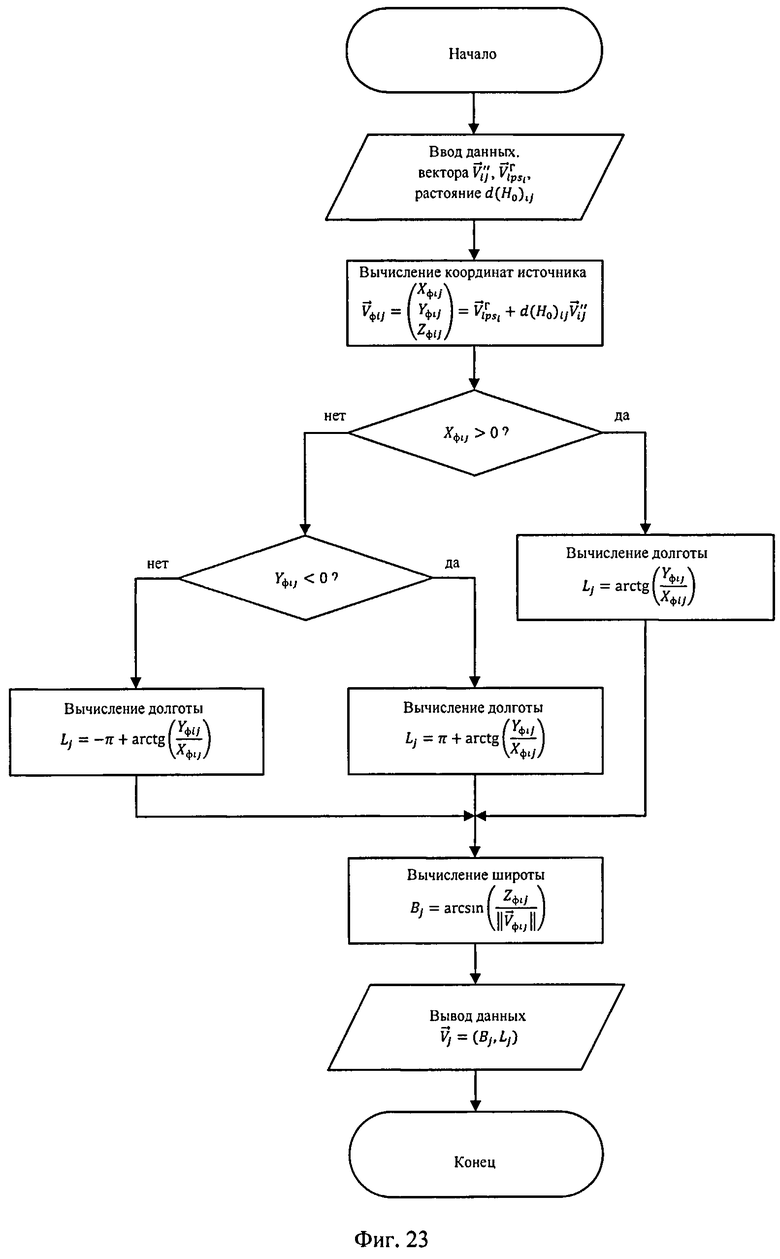
на фиг.23 показан алгоритм работы шестого вычислителя;
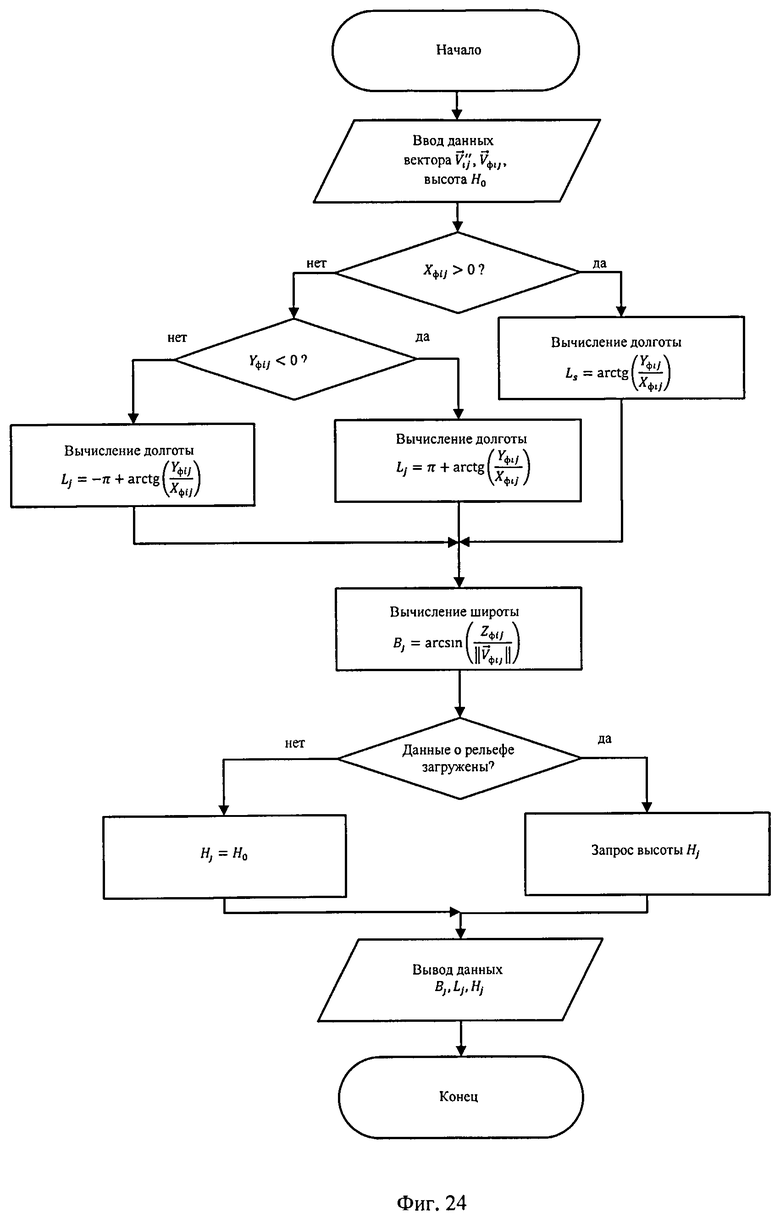
на фиг.24 показан алгоритм работы девятого вычислителя;
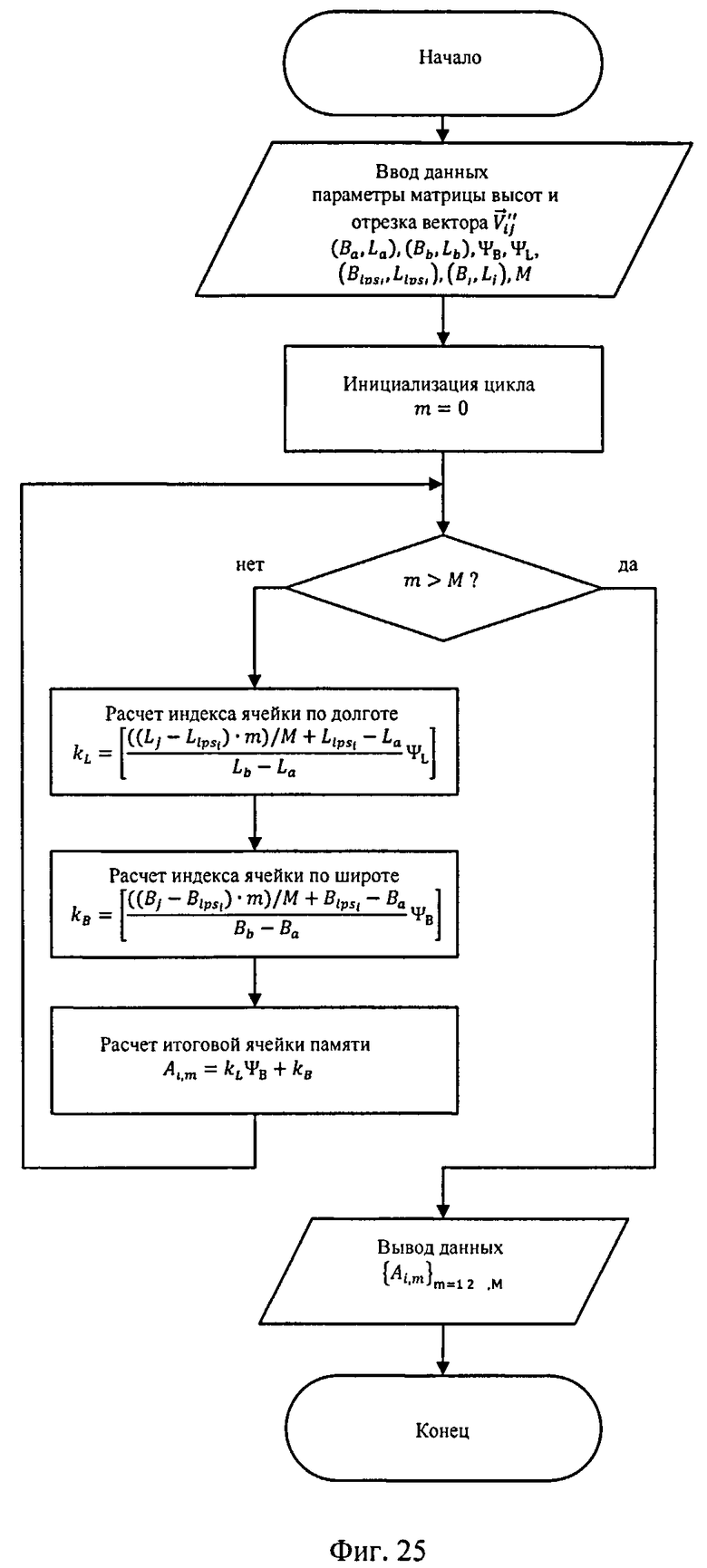
на фиг.25 приведен алгоритм работы третьего блока управления в режиме предварительного определения координат;
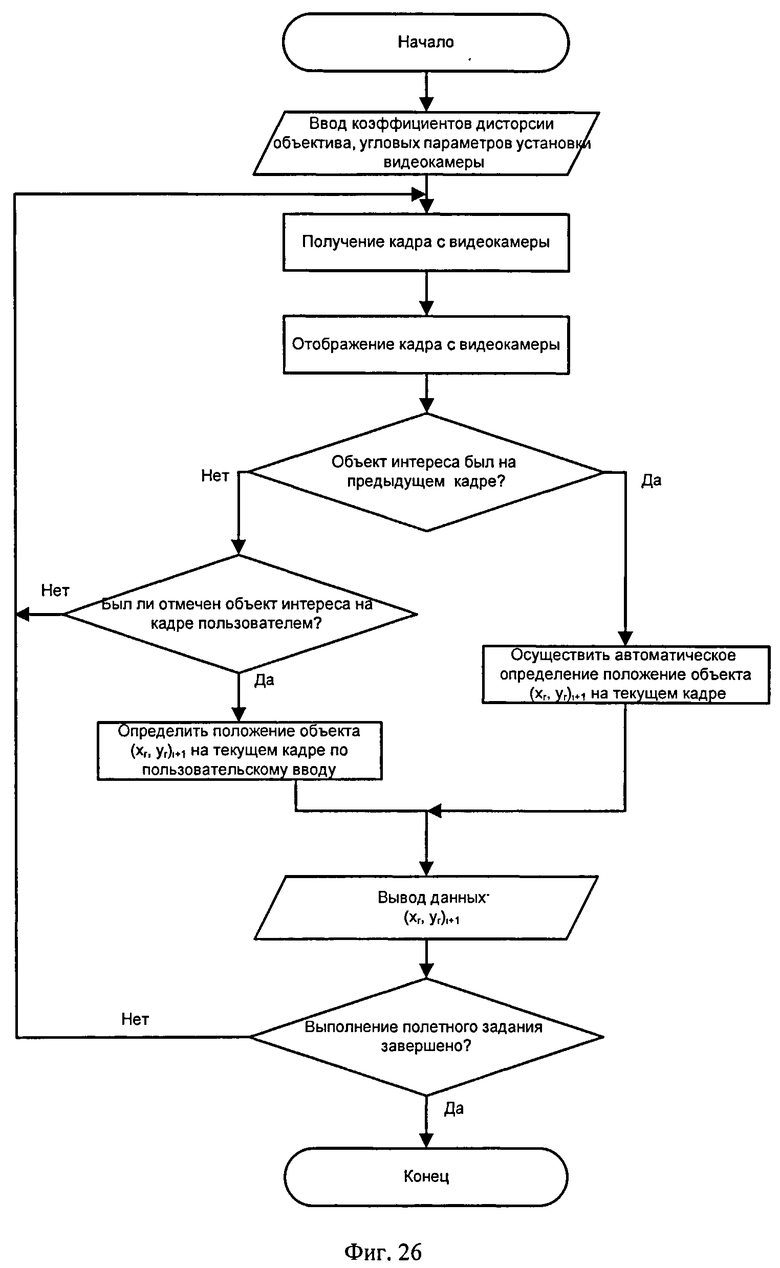
на фиг.26 приведен алгоритм работы второго блока управления.
Современные способы определения координат объектов с ЛПС, реализующих угломерно-дальномерный способ местоопределения, как правило базируются на использовании глобальных навигационных спутниковых систем (ГНСС) (см. В.С.Шебшаевич, П.П.Дмитриев, Н.В.Иванцевич и др. Спутниковые радионавигационные системы / Под ред. В.С.Шебшаевича. - М.: Радио и связь, 1993, стр.261-275). Однако кроме информации о собственном местоположении ЛПС и направлении его перемещения при решении задач местоопределения необходимо знание его пространственной ориентации: крена 




Реализация заявляемого способа поясняется следующим образом. На подготовительном этапе под фюзеляжем ЛПС устанавливают видеокамеру и фиксируют ее ориентацию. Измеряют ориентацию видеокамеры в трех плоскостях, принятых в авиации как крена


В процессе полета ЛПС по определенному маршруту с помощью видеокамеры осуществляется поиск заданных объектов. При визуальном обнаружении j-го объекта оператором принимается решение о необходимости измерения его координат. С этой целью местоположение объекта на кадре видеокамеры первоначально задается (определяется) оператором с помощью визира.
Полученные координаты j-го объекта 
На следующем этапе необходимо преобразовать координаты j-го объекта 
где 
f - фокусное расстояние объектива видеокамеры, пересчитанное в пиксели матрицы (кадра), (сх, су)T - координаты центра матрицы в пикселях, k1, k2, k3 - измеренные коэффициенты дисторсии объектива (см. Szeliski, Richard. Computer: Algorithms and Applications. Sprintger, 2010). Произведя переобозначение 

где 


Таким образом, обозначив 


Численное значение вектора 
Направление на j-й объект 
Координаты ЛПС 
В первом преобразовании вектора направления на j-й объект

где 
На следующем этапе в нормальной системе координат осуществляют преобразование скорректированного вектора направления на j-й объект 










где 
Уточненные значения азимута 


Здесь вектор
Для нахождения расстояния между ЛПС и j-м объектом d(H0)ij необходимо учесть шарообразный характер поверхности Земли. Иначе, данная задача может быть интерпретирована как нахождение расстояния d(/H0)ij, на котором вектор

где D - дискриминант квадратного уравнения: 


Нормальная система координат, в которой на данном этапе находится уточненный вектор


где 
На этом завершается первый этап измерений.
На следующем этапе результаты вычислений угла места 

Координаты объекта на "круглой" Земле в геоцентрической системе координат по направлению и расстоянию на высоте Н0 могут быть найдены с помощью выражения:
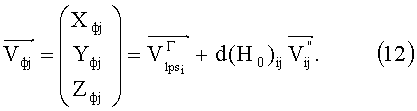
Переход от (12) к более удобной географической системе координат
широта 
где 
долгота  .
.
При малых значениях 

При выполнении пороговых условий 



На втором этапе измерений уточняют местоположение j-го объекта путем выделения соседней точки разбиения 





где  ,
, 
Результаты вычислений координат
Повышение точности определения координат объектов 
Координаты 
В первом варианте устраняется случайная составляющая погрешностей измерения направления на объект в системе координат видеокамеры, а определение координат объекта осуществляют лишь с использованием координат и ориентации БЛА, соответствующих первому кадру серии.
Во втором случае (являющемся ресурсоемким) для каждого кадра серии вычисляют координаты объекта интереса
Запишем координаты j-го объекта в пикселях на l-м кадре 
где Мl+1 - матрица проективного преобразования из l-го кадра в l+1-й. Определяется взаимным расположением видеокамер в l-й и l+1-й позициях и имеет вид:
Определение значения матрицы Мl+1 выполняют следующим образом. При помощи алгоритма SURF (см. Herbert Bay, Andreas Ess, Tinne Tnytelaars, Luc Van Gool SURF: Speeded Up Robust Features. - Computer Vision and Image Understanding (CVIU), Vol.110, №3, 2008, p.346-359) осуществляют поиск наборов контрастных точек на двух изображениях 




При обнаружении P пар соответствующих друг другу точек 

На практике число Р достаточно велико по сравнению с минимально необходимым для решения данной системы. Однако среди найденных соответствий контрастных точек могут быть ошибочные совпадения. Данная проблема устраняется при помощи алгоритма RANSAC (см. Martin A. Fischler and Robert С.Bolles {June 1981). Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Comm. of the ACM14 (6): 381-395. dot 10.1145/358669.358692). Алгоритм запускается на фиксированное число итераций, на каждой из которых из n найденных соответствий выбирается s случайных пар. Из выбранных пар получают систему из 2s линейных уравнений, которая решается методом наименьших квадратов. Для полученного решения считается невязка на всем наборе из 2n уравнений. После выполнения фиксированного числа итераций в качестве М выбирается наилучшее решение.
Таким образом, найдя матрицу проективного преобразования между соседними кадрами, представляется возможность нахождения координат объекта 


Таким образом, в предлагаемом способе определения координат объектов повышение точностных характеристик достигается благодаря более точному измерению вектора направления на объект
Устройство определения координат объектов, содержащее беспилотный летательный аппарат 1 (БЛА) и наземный пункт управления 2, причем БЛА 1 выполнен содержащим последовательно соединенные контроллер 8, рулевой привод 9 и аэродинамические рули 11, автопилот 4, группа информационных входов которого соединена с второй группой информационных выходов контроллера 8, первая группа информационных входов которого соединена с группой информационных выходов автопилота 4, двигательная установка 3, группа информационных входов которой соединена с третьей группой информационных выходов контроллера 8, первый приемо-передающий модуль 10, группа информационных входов которого соединена с четвертой группой информационных выходов контроллера 8, вторая группа информационных входов которого соединена с группой информационных выходов первого приемо-передающего модуля 10, и блок видеонаблюдения 5, а наземный пункт управления 2 выполнен содержащим последовательно соединенные первый блок управления 13, второй приемо-передающий модуль 14 и первое устройство обработки и отображения информации 17.
Для обеспечения высокоточного измерения координат заданных объектов с борта БЛА 1 в него дополнительно введены передающий модуль 12, блок навигации БЛА 7 и запоминающее устройство 6, причем, первая группа информационных входов запоминающего устройства 6 соединена с группой информационных выходов блока видеонаблюдения 5, вторая группа информационных входов соединена с группой информационных выходов блока навигации БЛА 7, а группа информационных выходов запоминающего устройства 6 соединена с группой информационных входов передающего модуля 12. В наземный пункт управления 2 дополнительно введены последовательно соединенные приемный модуль 15 и второе устройство обработки и индикации 16, и второй блок управления 18, группа информационных входов которого объединена с первой группой информационных входов второго устройства обработки и отображения информации 16, а группа информационных выходов - со второй группой информационных входов второго устройства обработки и отображения информации 16.
Заявляемое устройство определения координат объектов работает следующим образом (см. фиг.3). На подготовительном этапе на БЛА 1 под фюзеляжем устанавливают блок видеонаблюдения 5 (видеокамеру), например IP камеру EVS (см. Мегапиксельные сетевые камеры EVS. . evs.ru/prod.php?gr=313). Определяют маршрут полета БЛА 1 (поиска заданных объектов).
Управление взлетом, полетом и посадкой БЛА 1 осуществляют с первого автоматизированного рабочего места (АРМ) наземного пункта управления 2, состоящего из блока управления 13, второго приемопередающего модуля 14 и первого устройства обработки и отображения информации 14. Данную операцию осуществляют по первому радиоканалу на частоте 0,9-0,92 МГц с использованием модулей 10 и 14. Команды управления БЛА с выхода блока 13 через приемо-передающие модули 14 и 10 поступают на вход контроллера 8. С выхода блока 8 они следуют на группу входов двигательной установки 3 и через рулевой привод 9 на аэродинамические рули 11.
Команды, подаваемые на двигательную установку 3, могут включать в себя сигналы управления по включению/выключению двигателя 3, изменению скорости вращения винта и др.
Команды, подаваемые через рулевой привод 9 на аэродинамические рули 11 могут изменять углы наклона крыльев, конфигурацию их поверхности и другие параметры управления движением БЛА 1.
Автопилот 4 обеспечивает необходимую стабилизацию положения БЛА 1 в пространстве на заданной блоком 13 высоте, парирование ветровых возмущений, движение по заданному маршруту и т.д. Воздействие автопилота 4 на двигательную установку 3 и через рулевой привод 9 - на аэродинамические рули 11 осуществляется через контроллер 8. Последний формирует по исходным данным блока 4 необходимые команды управления функциональным узлам БЛА 1. Следует отметить, что в настоящее время первое автоматизированное рабочее место в состоянии одновременно управлять полетом до четырех БЛА 1 типа "Орлан 10".
Непосредственное участие в измерении координат объектов на борту БЛА 1 принимают блок видеонаблюдения 5, запоминающее устройство 6, блок навигации БЛА 7 и передающий модуль 12, а в наземном пункте управления 2 - второе автоматизированное рабочее место в составе приемного модуля 15, второго устройства обработки и отображения информации 16 и второго блока управления 18.
При наличии данных о положении и ориентации БЛА 1 существует возможность в оперативном режиме определять координаты объектов на видеоизображении (см. фиг.9). Изображение, полученное блоком видеонаблюдения 5 (IP камерой EVS), в цифровом формате передается на НПУ 2 с помощью блоков 12 и 15 в диапазоне 2,4 ГГц. Скорость передачи информации составляет 4 Мбит/с. При пересылке данных в формате JPEG возможна передача двух-четырех кадров высокого разрешения в секунду или десяти-двенадцати кадров низкого разрешения в секунду при поддерживаемом разрешении 1600×1200 или 640×480 (для камеры EVS) соответственно. Определение координат объекта осуществляется на втором автоматизированном рабочем месте (блоки 15, 16 и 18), на которое и подается видеопоток с блока 5 в реальном масштабе времени (см. фиг.10). Получаемое на экране АРМ изображение позволяет оператору выбрать с помощью блока 18 заданный объект. Благодаря данным телеметрии БЛА 1 и положению объекта на текущем кадре делает возможным с некоторой погрешностью рассчитать географические координаты интересующего объекта.
В функции блока 6 входит совместная запись кадров видеоизображения с блока 5 и соответствующих им навигационных данных БЛА1 с выхода блока 7.
Выполненные экспериментальные исследования на базе БЛА "Орлан-10" показали, что на точность определения координат объектов влияет ряд факторов:
погрешность определения географических координат БЛА при помощи СгРЯ-приемника составляет 15-30 м, что влечет за собой погрешность в 15-30 метров;
погрешность в определении углов ориентации БЛА "Орлан" при помощи встроенных акселерометров на данный момент составляет 1° (при малых, до 10°, отклонениях БЛА 1 от горизонта). Вклад, вносимый этой погрешностью, пропорционален высоте Н, БЛА 1 и для 1000 метров составляет около 15 м по каждому из углов;
погрешность, вызванная запаздыванием в процессе привязки телеметрии к кадру из-за задержек в канале связи. При полете со скоростью 100 км/ч БЛА за одну секунду пролетает 27 метров. Запаздывание телеметрии на одну секунду может внести погрешность в измерения порядка 25-30 м;
погрешность, вызванная запаздыванием при привязке телеметрии к кадру, вызванная низкой частотой обновления GPS-координат (один раз в секунду), что влечет погрешность также 25-30 м.
Таким образом, суммарная погрешность определения координат с высоты 1000 м может составить 100 м.
В предлагаемых способе и устройстве приняты меры к повышению точности измерения координат:
используется более точное навигационное оборудование, позволяющее определять местоположения БЛА с точностью 3-5 м, а ориентацию БЛА с точностью до десятых градуса, выполненное в соответствии с пат. РФ №2371733 и №2374659. Вносимая при этом погрешность измерений составляет 2-10 метров;
использование цифрового канала связи в совокупности с привязкой телеметрии к видео на борту ЛПС позволяет исключить погрешность, связанную с запаздыванием в каналах связи;
использование навигационного оборудования, позволяющего обновлять информацию о положении БЛА до 10 раз в секунду позволяет значительно уменьшить погрешность, связанную с привязкой телеметрии к кадру;
усреднение значений координат (Bj, Lj) или (хr, yr), достигаемое многопозиционным их измерением, позволяет уменьшить вклад, вносимый погрешностями измерений, носящий случайный характер.
Совокупное использование названных мер позволило обеспечить снижение суммарной погрешности в определении координат с высоты 1000 метров до 2-10 метров. Следует отметить, что наибольший вклад вносит погрешность определения местоположения БЛА, носящая систематический характер.
Все функциональные элементы и блоки предлагаемого устройства, широко освещены в литературе и серийно выпускаются.
В качестве БЛА 1 целесообразно использовать серийно выпускаемый ООО "Специальный Технологический Центр" город Санкт-Петербург БЛА "Орлан 10" (см. 10.html).
Масса полезной нагрузки БЛА составляет 5 кг, способ старта - с разборной катапульты, приземление - на парашюте. Воздушная скорость БЛА 90-150 км/ч, максимальная продолжительность полета - 16 часов, максимальная дальность - 600 км, максимальная высота - 5 км.
Блок видеонаблюдения 5 может быть реализован с помощью цифровой IP видеокамеры EVS. Блок навигации 7 может быть реализован в соответствии с пат. РФ №2371733 или пат. РФ №2374659.
Управление БЛА 1 "Орлан-10" реализуют с первого АРМ по низкоскоростному дуплексному каналу связи на частотах 900-920 МГц в режиме псевдослучайной перестройки рабочей частоты. По этому каналу (блоки 10 и 14) осуществляют задание маршрута полета, высоту полета и порядок облета: проход на высоте или барражирование и т.д. Управляющая информация формируется с помощью блока 13, в качестве которого может использоваться ноутбук.
Видеоизображение объектов на НПУ 2 с борта БЛА 1 поступает по высокоскоростному симплексному каналу на частотах 2000-2500 МГц на второе АРМ. Скорость передачи информации 4 Мбит/с. Дальность связи зависит от высоты полета и местных условий и в среднем составляет 100-130 км.
Второе устройство обработки и отображения информации 16 (см. фиг.11) предназначено для определения координат объектов (решение принимается оператором, команда на исполнение которого формируется с помощью блока 18), реализации операций в соответствии с выражениями 1-16, представления результатов измерений в заданной форме. Оно содержит первый вычислитель 19, второй вычислитель 20, третий вычислитель 21, четвертый вычислитель 22, пятый вычислитель 23, шестой вычислитель 24, седьмой вычислитель 25, второе запоминающее устройство 26, генератор синхроимпульсов 27, восьмой вычислитель 28, девятый вычислитель 29, блок коммутации 30, блок обработки изображения 31, третий блок управления 32, третье запоминающее устройство 33, блок усреднения координат 34, блок сравнения 35 и блок индикации 36.
Второе устройство обработки и отображения информации 16 работает следующим образом.
На подготовительном этапе с помощью блока управления 18 (в качестве последнего может быть использован ноутбук, работающий в соответствии с алгоритмом, представленным на фиг.26) задаются исходные данные:
ориентация видеокамеры относительно борта (kk, lk, ζk);
измеренные коэффициенты дисторсии объектива видеокамеры k1, k2, k3;
пороговые значения Δβ, Δd и Δδ;
количество итераций при решении уравнения перехода от координат объекта в кадре 
число итераций расчета в алгоритме RANSAC;
цифровая карта района измерений с граничными характеристиками рельефа местности.
В процессе работы видеоизображение считывается блоками 18 и 31. При обнаружении заданного объекта информация о нем с выхода блока 18 поступает на первую группу информационных входов седьмого вычислителя 25 в виде координат 

Одновременно информация о пространственном положении БЛА (Blps, Llps, Hlps)i, а также 


Результаты вычислений 

Значения скорректированного вектора 







Уточненное значение вектора направления на j-й объект 



Для измерения d(H0)ij значение

На следующем этапе работы заявляемого устройства осуществляют преобразование вектора 
Назначение шестого вычислителя 24 состоит в определении координат точки пересечения вектора



Одновременно (с блоком 22) в блоке 28 в два этапа осуществляют определение координат j-го объекта с заданной точностью. Данную операцию выполняют совместно с блоком управления 32 и запоминающим устройством 33. На подготовительном этапе в запоминающее устройство 33 записывают цифровую карту рельефа местности района измерений. Данная операция выполняется с помощью блока 18 по первой группе информационных входов блока 16. Одновременно по этой же шине в блок управления 32 задают граничные значения матрицы высот (Ва, Lа) и (Bb,Lb) и количество точек разбиения J, а в блок 28 - количество шагов сканирования по вектору 


Геоцентрические координаты j-го объекта далее поступают на информационные входы девятого вычислителя 29. В блоке 29 выполняют преобразование геоцентрических координат в географические 
Результаты вычислений с выхода блока 29 поступают на первую группу информационных входов коммутатора 30.
Решение о том, какие координаты пойдут на вход блока 34 (приблизительные



При возникновении ситуации, при которой отсутствует информация о рельефе местности и (
При оценке координат по одному или по первому кадру видеоизображения объекта на выходе блока 31 отсутствует управляющий сигнал. В блоке 34 операция усреднения не выполняется, а значения координат j-го объекта поступают на вход блока индикации 36. Кроме того, результаты измерений сохраняются в его буферной памяти. На этом заканчивается этап работы устройства по одному кадру видеоизображения.
На следующем этапе (на очередном кадре) с помощью блока анализа видеоизображения 31 выполняют анализ поступившего кадра на предмет наличия в нем изображения заданного j-го объекта. Однако алгоритм работы устройства меняется при обнаружении в последующем кадре наблюдаемого ранее j-го объекта. В этом случае осуществляется многократное (по числу кадров с изображением объекта) измерение его координат с последующим их усреднением в блоке 34, что позволяет существенно повысить точность измерений. Основным элементом, реализующим эти измерения, является блок обработки изображения 31. Если блоком 31 на очередном кадре j-й объект не обнаружен, результаты измерений его усредненных координат остаются неизменными, поступают на информационные входы блока индикации 36.
При обнаружении j+1-го объекта все вышеназванные операции повторяются.
Блок 31 предназначен для решения следующих задач (см. фиг.14 и 16):
поиска контрастных точек на изображении методом SURF;
вычисления характеристик контрастных точек методом BRIEF;
сравнения с контрастными точками предыдущего кадра и принятие решения о присутствии заданного объекта в текущем кадре;
при повторном обнаружении заданного объекта - для формирования управляющего сигнала блоку 34 о необходимости усреднения результатов измерений;
формирования матрицы проективного преобразования методом RANSAC с последующим уточнением координат 
Данные функции блок 31 выполняет в соответствии с выражениями (15) и (16). В случае принятия решения блоком 31 о том, что в очередном l+1-м кадре присутствует изображение j-го объекта, ранее присутствовавшее на 1-м кадре, последний формирует управляющий сигнал блоку 34. В результате координаты объекта, полученные на l+1-м кадре, запоминаются совместно с результатами, полученными на l-м кадре. Далее в блоке выполняется операция усреднения координат по двум кадрам, а результаты высвечиваются в блоке индикации 36. Наличие j-го объекта во всех последующих кадрах приводит к очередному измерению его координат 

Первый 19, второй 20, третий 21, четвертый 22, пятый 23 и седьмой 25 вычислители предназначены для определения истинного вектора направления на j-й объект 

Шестой 24, восьмой 26 и девятый 29 вычислители реализуются аналогично соответствующим блокам в пат. РФ №2458360, опубл. 10.08.2012 г. Шестой вычислитель 24 предназначен для определения координат точки пересечения вектора 


Реализация блока трудностей не вызывает. Может быть реализован на постоянных запоминающих устройствах К541 и К500 сериях микросхем. Алгоритм работы приведен на фиг.23.
Восьмой вычислитель 28 предназначен для определения местоположения объекта с заданной точностью в геоцентрической системе координат 
Девятый вычислитель 29 предназначен для преобразования геоцентрических координат объекта 

алгоритмом на фиг.24 и выражением (13). Реализация блока 29 известна и трудностей не вызывает. Блок 29 может быть реализован на дискретных элементах на базе ТТЛ-уровней сигналов, например 555, 1533 сериях микросхем и др.
Третий блок управления 32 предназначен для преобразования части вектора 
Блок обработки изображения 31 (см. фиг 14 и 16) свои функции выполняет в соответствии с выражениями (15) и (16). Блок 31 содержит последовательно соединенные блок поиска контрастных точек 49, блок вычисления характеристик контрастных точек 50, запоминающее устройство 53, блок анализа 51, формирователь исходных данных 52, блок статистической обработки 55, умножитель 56 и делитель 57, группа информационных выходов которого является первой группой информационных выходов блока обработки изображения 31, первая группа информационных входов которого соединена с группой информационных выходов блока поиска контрастных точек 49, а вторая группа информационных входов соединена со второй группой информационных входов умножителя 56, вторая группа информационных выходов блока вычисления характеристик контрастных точек 50 соединена со второй группой информационных входов блока анализа 51, и датчик случайных чисел 54, группа информационных входов которого соединена со второй группой информационных входов блока статистической обработки, а синхровходы всех блоков с 49 по 57 объединены и соединены с входом синхронизации блока обработки изображения 31.
Видеоизображение с группы информационных выходов блока 15 поступает на группу информационных входов блока поиска контрастных точек 49. В функцию блока 49 входит реализация известного алгоритма SURF. Обнаруженные контрастные точки на l+1-м кадре с описанием их взаимного местоположения поступают на группу входов блока вычисления характеристик контрастных точек 50, которые выполняются в соответствии с алгоритмом BRIEF. В задачу последнего входит вычисление битовых векторов (наборов бит), описывающих распределение яркости изображения в окрестности данной контрастной точки 
Характеристики контрастных точек с описанием их взаимного местоположения одновременно поступают на группы входов запоминающего устройства 53 (для использования в следующем кадре) и блока анализа 51. В функции блока 51 входит сравнение изображений на предыдущем l-м (поступившем с выходов блока 53) с текущим l+1-м кадрах. Данная операция выполняется по контрастным точкам: их взаимному местоположению на кадрах и характеристикам. Описание совпадающих пар контрастных точек из l-го и l+1-го кадров поступает на группу информационных выходов формирователя исходных данных 52. Блок 52 обеспечивает преобразование полученных из блока 51 данных к виду, необходимому для нормальной работы блока 55.
Блок статистической обработки 55 предназначен для решения системы уравнений (16). Данную функцию блок 55 выполняет на основе известного алгоритма RANSAC и данных, поступающих на его первую группу информационных входов с группы выходов блока 52. В процессе работы используют последовательность случайных чисел, формируемых блоком 54. Решение названной системы уравнений позволяет определять коэффициенты искомой матрицы проективного преобразования.
В блоке 56 осуществляется умножение найденной блоком 55 матрицы проективного преобразования на вектор координат объекта на l-м кадре
Блок 31 может быть реализован на микропроцессорной сборке с достаточным быстродействием (см. Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512 с.), в которой реализован алгоритм на фиг.16.
Реализацию функций блоков 24-35 целесообразно осуществить с помощью второго сигнального процессора (см. TMS320c6416: http://focus/ti/com/docs/prod/folders/print/TMS320c6416.html).
Кроме того, блоки 16 и 18 могут быть одновременно реализованы на персональном компьютере. В качестве минимальных требований к нему можно определить следующее: процессор Core i5 2000 МГц, 1 ГБ оперативной памяти, 200 МБ свободного пространства на жестком диске. Программная составляющая: операционная система Windows ХР SP2 и выше, библиотека. NetFrameWork 4.0, цифровая карта местности с информацией о рельефе и формате, совместимом с картами "Группы "Панорама".
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2022 |
|
RU2812755C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |
| Способ определения координат объектов и их распознавания | 2022 |
|
RU2787946C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2011 |
|
RU2469408C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2458360C1 |
| Способ и устройство определения координат источников радиоизлучения | 2018 |
|
RU2700767C1 |
| Способ и устройство определения координат источников радиоизлучения | 2017 |
|
RU2659810C1 |



Изобретения относятся к области радиотехники и могут быть использованы для определения местоположения объектов угломерно-дальномерным способом с летно-подъемного средства (ЛПС). Достигаемый технический результат - повышение точности определения координат объектов. Технический результат достигается благодаря более точному измерению вектора направления на объект 
1. Способ определения координат объектов, заключающийся в том, что на подготовительном этапе на борт летно-подъемного средства (ЛПС) под фюзеляжем устанавливают видеокамеру, определяют ориентацию видеокамеры относительно борта ЛПС (kk,lk,ζk), где kk, lk, ζk - соответственно углы крена, тангажа и склонения видеокамеры, а в процессе полета постоянно через заданный интервал времени Δt определяют местоположение ЛПС  где
где  соответственно широта, долгота и высота ЛПС, и его пространственную ориентацию
соответственно широта, долгота и высота ЛПС, и его пространственную ориентацию  где
где  соответственно углы крена, тангажа и склонения ЛПС в i-й момент времени, совместно запоминают навигационные и временные параметры ЛПС, а при визуальном обнаружении j-го заданного объекта в момент времени ti предварительно определяют вектор направления на него
соответственно углы крена, тангажа и склонения ЛПС в i-й момент времени, совместно запоминают навигационные и временные параметры ЛПС, а при визуальном обнаружении j-го заданного объекта в момент времени ti предварительно определяют вектор направления на него  в системе координат видеокамеры, переводят координаты ЛПС в геоцентрическую систему координат, корректируют вектор направления на j-й объект
в системе координат видеокамеры, переводят координаты ЛПС в геоцентрическую систему координат, корректируют вектор направления на j-й объект  с учетом априорно известной ориентации камеры
с учетом априорно известной ориентации камеры
относительно борта ЛПС (kk,lk,ζk) путем последовательного умножения значений  на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления
на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления  на j-й объект с учетом измеренных в момент времени ti пространственных углов ЛПС: крена
на j-й объект с учетом измеренных в момент времени ti пространственных углов ЛПС: крена  , тангажа
, тангажа  , и склонения
, и склонения  , определяют уточненные значения азимута
, определяют уточненные значения азимута  угла места
угла места  и удаление ЛПС, находящегося в момент времени ti на высоте
и удаление ЛПС, находящегося в момент времени ti на высоте  , от j-го объекта
, от j-го объекта  расположенного на поверхности "круглой" Земли, в геоцентрической системе координат определяют значение истинного вектора направления на j-й объект
расположенного на поверхности "круглой" Земли, в геоцентрической системе координат определяют значение истинного вектора направления на j-й объект  которое зависит от широты Blps, долготы Llps, местоположения ЛПС, определяют координаты точки пересечения вектора
которое зависит от широты Blps, долготы Llps, местоположения ЛПС, определяют координаты точки пересечения вектора  с "круглой" Землей
с "круглой" Землей  преобразуют геоцентрические координаты j-го объекта
преобразуют геоцентрические координаты j-го объекта  в географические
в географические  где Bj и Lj соответственно широта и долгота местоположения j-го объекта, отличающийся тем, что предварительно измеряют и запоминают коэффициенты дисторсии объектива видеокамеры k1, k2 и k3, положение видеокамеры относительно борта ЛПС фиксируют на весь период измерений, в качестве j-го объекта может выступать любой стационарный или подвижный физический объект, наблюдаемый в видеокамеру, причем решение о необходимости измерения координат наблюдаемого объекта принимает оператор, значение предварительного вектора направления на j-й объект
где Bj и Lj соответственно широта и долгота местоположения j-го объекта, отличающийся тем, что предварительно измеряют и запоминают коэффициенты дисторсии объектива видеокамеры k1, k2 и k3, положение видеокамеры относительно борта ЛПС фиксируют на весь период измерений, в качестве j-го объекта может выступать любой стационарный или подвижный физический объект, наблюдаемый в видеокамеру, причем решение о необходимости измерения координат наблюдаемого объекта принимает оператор, значение предварительного вектора направления на j-й объект  определяют по местоположению объекта на кадре в момент времени ti, уточняют значение предварительного вектора направления на j-й объект
определяют по местоположению объекта на кадре в момент времени ti, уточняют значение предварительного вектора направления на j-й объект  путем устранения влияния на результаты измерений дисторсии видеокамеры, при наличии n последовательных кадров, n=2, 3, …, N, с изображением j-го объекта выполняют n циклов измерений географических координат
путем устранения влияния на результаты измерений дисторсии видеокамеры, при наличии n последовательных кадров, n=2, 3, …, N, с изображением j-го объекта выполняют n циклов измерений географических координат  а результаты измерений усредняют, при наличии цифровой карты местности района измерений, представляющей собой матрицу с заданной дискретностью по координатам района измерений с соответствующими значениями высот рельефа, дополнительно уточняют географические координаты обнаруженного j-го объекта
а результаты измерений усредняют, при наличии цифровой карты местности района измерений, представляющей собой матрицу с заданной дискретностью по координатам района измерений с соответствующими значениями высот рельефа, дополнительно уточняют географические координаты обнаруженного j-го объекта 
2. Способ по п.1, отличающийся тем, что координаты j-го объекта  в кадре определяют в пикселях, отсчитанных от верхнего левого угла кадра видеокамеры.
в кадре определяют в пикселях, отсчитанных от верхнего левого угла кадра видеокамеры.
3. Способ по п.1, отличающийся тем, что переход от координат j-го объекта в кадре к уточненному предварительному вектору направления на него  в системе координат видеокамеры, осуществляют в соответствии с выражением
в системе координат видеокамеры, осуществляют в соответствии с выражением
где  - координаты центра матрицы (кадра) в пикселях, ƒ - фокусное расстояние объектива видеокамеры, пересчитанное в пиксели матрицы,
- координаты центра матрицы (кадра) в пикселях, ƒ - фокусное расстояние объектива видеокамеры, пересчитанное в пиксели матрицы,  k1, k2, k3- измеренные коэффициенты дисторсии объектива, с использованием метода простых итераций.
k1, k2, k3- измеренные коэффициенты дисторсии объектива, с использованием метода простых итераций.
4. Способ по п.1, отличающийся тем, что при наличии цифровой карты рельефа местности района измерений формируют последовательный набор значений высот {Hi,m}, m= 1, 2, …, M, который соответствует равномерно распределенным координатам на отрезке, соединяющем координаты  и (Bj,Lj}, M=d(H0)/Δd, где Δd - шаг сканирования по вектору направления
и (Bj,Lj}, M=d(H0)/Δd, где Δd - шаг сканирования по вектору направления  на j-й объект, определяется заданной точностью предварительного измерения координат объекта, рассчитывают координаты
на j-й объект, определяется заданной точностью предварительного измерения координат объекта, рассчитывают координаты  соответствующие дискретно выделенным высотам рельефа местности Hi,m, а за предварительные координаты j-го объекта
соответствующие дискретно выделенным высотам рельефа местности Hi,m, а за предварительные координаты j-го объекта  принимают первую точку разбиения вектора
принимают первую точку разбиения вектора  находящуюся ниже уровня рельефа местности, уточняют местоположение j-го объекта путем выделения соседней точки разбиения
находящуюся ниже уровня рельефа местности, уточняют местоположение j-го объекта путем выделения соседней точки разбиения  находящейся над рельефом местности, отрезок
находящейся над рельефом местности, отрезок  вектора направления на j-й объект
вектора направления на j-й объект  делят на δ равных интервалов, Δδ<<Δd, где Δδ - шаг сканирования по выделенному отрезку вектора направления
делят на δ равных интервалов, Δδ<<Δd, где Δδ - шаг сканирования по выделенному отрезку вектора направления  и определяется конечной заданной точностью измерения координат объектов, для названных точек вычисляют координаты
и определяется конечной заданной точностью измерения координат объектов, для названных точек вычисляют координаты  и соответствующие им значения высоты рельефа местности Hi,m,δ, за точные координаты j-го объекта принимают значение
и соответствующие им значения высоты рельефа местности Hi,m,δ, за точные координаты j-го объекта принимают значение  находящееся между соседними точками, расположенными выше и ниже рельефа местности, а полученное значение координат j-го объекта
находящееся между соседними точками, расположенными выше и ниже рельефа местности, а полученное значение координат j-го объекта  преобразуют в удобную географическую систему координат
преобразуют в удобную географическую систему координат 
5. Устройство определения координат объектов, состоящее из беспилотного летательного аппарата (БЛА) и наземного пункта управления, причем БЛА выполнен содержащим последовательно соединенные контроллер, рулевой привод и аэродинамические рули, автопилот, группа информационных входов которого соединена с второй группой информационных выходов контроллера, первая группа информационных входов которого соединена с группой информационных выходов автопилота, двигательная установка, группа информационных входов которой соединена с третьей группой информационных выходов контроллера, первый приемо-передающий модуль, группа информационных входов которого соединена с четвертой группой информационных выходов контроллера, вторая группа информационных входов которого соединена с группой информационных выходов первого приемо-передающего модуля, и блок видеонаблюдения, а наземный пункт управления выполнен содержащим последовательно соединенные первый блок управления, предназначенный для формирования команд управления взлетом, полетом и посадкой БЛА, второй приемо-передающий модуль и первое устройство обработки и отображения информации, отличающееся тем, что в БЛА дополнительно введены передающий модуль, блок навигации БЛА и запоминающее устройство, причем, первая группа информационных входов запоминающего устройства соединена с группой информационных выходов блока видеонаблюдения, вторая группа информационных входов соединена с группой информационных выходов блока навигации БЛА, а группа информационных выходов запоминающего устройства соединена с группой информационных входов передающего модуля, а в наземный пункт управления дополнительно введены последовательно соединенные приемный модуль и второе устройство обработки и индикации, второй блок управления, предназначенный для задания исходных данных и формирования команды на определение координат объектов, группа информационных входов которого объединена с первой группой информационных входов второго устройства обработки и отображения информации, а группа информационных выходов - со второй группой информационных входов второго устройства обработки и отображения информации.
| СИСТЕМА НАБЛЮДЕНИЯ ЗА ЗЕМНОЙ ПОВЕРХНОСТЬЮ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2323851C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЭЛЕМЕНТА РАБОЧЕГО КОЛЕСА ТУРБИНЫ И РАБОЧЕГО КОЛЕСА ТУРБИНЫ | 2004 |
|
RU2265497C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ И ПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2007 |
|
RU2431863C2 |
| JP 2011174875 A, 08.09.2011 | |||
| JP 2011242182 A, 01.12.2011 | |||
| US 6286786 B1, 11.09.2001 | |||
| US 6005609 A, 21.12.1999 | |||

