Изобретение относится к области информационно-измерительных систем и может быть использовано в устройствах систем компьютерного зрения, предназначенных для решения задач измерения дальности, скорости и направления движения объектов по их цифровым видеоизображениям.
Известен способ определения расстояния до наблюдаемого объекта [1], его направления и скорости движения в дискретные моменты времени посредством оптического фотоприемника, имеющего перестраиваемую оптическую систему с двумя известными граничными фокусными расстояниями (например, трансфокатор), при этом получают два изображения объекта, отличающихся друг от друга масштабом, и путем их сопоставления определяют расстояние до объекта. Скорость объекта и направление движения определяют путем сопоставления его положения на изображениях одного масштаба, полученных в текущем и предыдущем измерениях расстояния до объекта, произведенных через известный промежуток времени. Недостатком этого способа являются снижение точности определения расстояния до подвижного объекта, поскольку перестройка оптической системы на другое фокусное расстояние занимает время, в течение которого происходит изменение положения объекта в пространстве или его частичное перекрытие другими объектами и, как следствие, изменение формы или размера его проекции на плоскость изображения. Помимо этого оптические системы с изменяемым фокусным расстоянием менее надежны и стоят дороже, чем их аналоги с фиксированным фокусным расстоянием.
Наиболее близким к предлагаемому является принятый за прототип способ, применяемый в криминалистике [2]. Для определения расстояний между объектами по одиночным снимкам используется фотосъемка с несколькими привязочными мерными вешками, которые расставляются на фотографируемом участке. Определение расстояний до объектов и их размеров по снимку основано на зависимости размера изображений мерных вешек от расстояния до точки съемки. Недостаток метода заключается в необходимости соблюдения требований касательно установки мерных вешек параллельно друг другу и выборе такого ракурса съемки, чтобы оптическая ось фотокамеры в момент фотографирования была направлена перпендикулярно им. Таким образом, снижается точность полученных результатов и скорость выполнения измерений.
Задача изобретения – исключение влияния ракурса съемки на точность измерения расстояния.
Поставленная задача решается благодаря тому, что в способе измерения расстояний на цифровой видеокамере используется специальная мишень в форме шара, которая крепится к объекту, до которого требуется определить расстояние; при этом обнаружение объекта производится по цвету мишени, один из компонентов которого является слабо выраженным; расстояние до объекта определяется путем распознавания контура и определения радиуса мишени на видеоизображении, после чего физический размер радиуса мишени сопоставляется с его размером на видеоизображении и вычисляется расстояние до требуемого объекта в заданный момент времени в соответствии с выражением:
где F – фокусное расстояние объектива видеокамеры;
r(t) – радиус мишени в пикселях на видеокадре в момент времени t;
pix – физический размер пикселя видеоизображения (на матрице).
Свойства, появляющиеся у заявляемого способа, – это повышение точности и достоверности результатов измерения расстояния до объекта, расширение функциональных возможностей, направленных на обнаружение требуемого объекта среди других, а также определение скорости и направления его движения, что обусловлено применением мишени с формой шара, проекция которой с любого ракурса на плоскость изображения представляет собой окружность, при этом цвет мишени задается уникальным набором цветовых компонентов, облегчающим ее обнаружение на фоне других объектов. Еще одно свойство, появляющееся у заявляемого способа, – это возможность отслеживать перемещение объекта, обусловленное применением методов цифровой обработки видеоизображения, что позволяет использовать данный способ в устройствах видеонаблюдения.
Сущность способа измерений поясняется чертежами. Фиг. 1 поясняет зависимость между физическим размером мишени 1 диаметром D и размером диаметра d на ее изображении, которое формируется при помощи оптической системы видеокамеры, состоящей из объектива 2 и прибора с зарядовой связью (ПЗС-матрицы) 3. Фиг. 2 поясняет принцип определения скорости и направления движения объекта при его перемещении из точки A в точку B пространства за некоторый промежуток времени.
Способ осуществляют следующим образом. С помощью цифровой видеокамеры на ПЗС-матрице 3 формируется изображение мишени, прикрепленной к требуемому объекту. Изображение состоит из множества пикселей:
где  – координаты пикселя на изображении;
– координаты пикселя на изображении;

Вектор 
Каждый компонент цвета также может быть представлен в виде множества натуральных чисел, определяющих 256 градаций цвета:

Требуется выделить множество пикселей, принадлежащих мишени 1 на изображении 

Граничные значения цветовых компонентов, определяющих диапазон изменения цвета объекта, могут варьировать в широких пределах в зависимости от конкретных условий проведения съемки: уровень освещенности, ракурс и удаленность объекта. Таким же образом задается множество пикселей составляющих фон на изображении



Для обнаружения мишени необходимо, чтобы максимальное значение функции характеризовало мишень, а минимальное соответствовало фону изображения:

Это условие представляется в виде системы выражений:
где A1,A2,A3 – коэффициенты, удовлетворяющие этому условию.
Исходя из того, что мишень имеет минимальное присутствие одного из цветовых компонентов, допустим что 




Как правило, средние значения цветовых компонентов фона сильно не отличаются друг от друга, поэтому делается еще одно допущение однородности фона 

Задав

а функция примет вид:

Установив для функции некоторое пороговое значение k, характеризующее отклонение значений цветовых компонентов мишени от среднего, мишень отделяется от фона путем применения следующего условия:

При невыполнении условия пиксель изображения окрашивается в черный цвет:

Таким образом, на изображении остается только мишень на черном фоне.
Затем производится выделение контура мишени по максимальным значениям лапласиан:
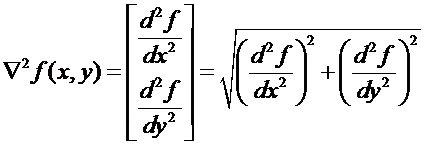
путем применения условия:

где k – пороговый коэффициент.
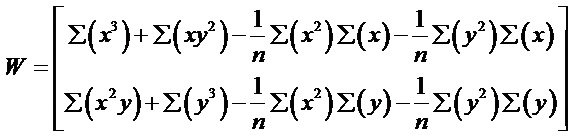
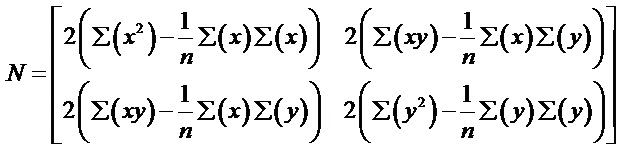
Полученные участки контура аппроксимируются окружностью по методу наименьших квадратов. Радиус окружности вычисляется из выражения:

где 

где

Сами матрицы представлены выражениями:
Расстояние до мишени в момент времени t определяется из выражения:

где F – фокусное расстояние объектива видеокамеры;
r(t) – радиус окружности в пикселях на кадре видеоизображения мишени в момент времени t;
pix – физический размер пикселя видеоизображения (на матрице 3).
Для определения направления и скорости движения определенного объекта на полученном в момент времени ti-1 кадре видеоизображения определяют координаты 

В следующий дискретный момент времени ti производится повторное определение координат хi и уi центра мишени 1. Зная расстояния до мишени Li-1 и Li в моменты времени ti-1 и ti и разность координат на матрице 

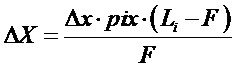

Затем по составляющим скорости Vx, Vy и Vz вычисляется скорость V объекта из выражения:

Направление движения объекта определяется через трехкомпонентный вектор скорости 
Источники информации
1. Патент РФ № 2340872, МПК G01C 3/32, на изобретение «Моностатический способ определения расстояния до объекта, его направления и скорости движения».
2. Ищенко Е.П., Филиппов А.Г. Криминалистика. – М.: Высшее образование, 2007. – С. 743.

Изобретение относится к области информационно-измерительных систем и может быть использовано в устройствах систем компьютерного зрения, предназначенных для решения задач измерения дальности, скорости и направления движения объектов по их цифровым видеоизображениям. Заявленный способ измерения расстояния на цифровой видеокамере с помощью мишени заключается в формировании видеокамерой цифрового видеоизображения измеряемого объекта и прикрепленной к нему мишени в форме шара известного радиуса, цвет которой характеризуется одним слабо выраженным цветовым компонентом. При этом путем обработки отдельных кадров видеоизображения производится обнаружение, распознавание контура и определение радиуса мишени, после чего физический размер радиуса мишени сопоставляется с его размером на видеоизображении и вычисляется расстояние до требуемого объекта в заданный момент времени. Технический результат – исключение влияния ракурса съемки на точность измерения расстояния. 2 ил.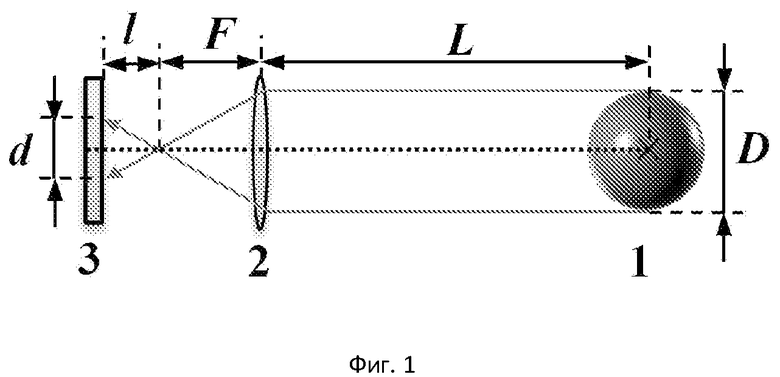
Способ измерения расстояния на цифровой видеокамере с помощью мишени, заключающийся в формировании видеокамерой цифрового видеоизображения измеряемого объекта и прикрепленной к нему мишени в форме шара известного радиуса, цвет которой характеризуется одним слабо выраженным цветовым компонентом; при этом путем обработки отдельных кадров видеоизображения производится обнаружение, распознавание контура и определение радиуса мишени, после чего физический размер радиуса мишени сопоставляется с его размером на видеоизображении и вычисляется расстояние до требуемого объекта в заданный момент времени в соответствии с выражением
где F – фокусное расстояние объектива видеокамеры;
R – физический размер радиуса мишени;
r(t) – радиус мишени в пикселях на видеокадре в момент времени t;
pix – физический размер пикселя видеоизображения (на матрице).
| Ищенко Е.П., Филиппов А.Г | |||
| Криминалистика | |||
| - М.: Высшее образование, 2007 | |||
| - С | |||
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕМА ТВЕРДЫХ ТЕЛ | 1923 |
|
SU743A1 |
| Статья "СУБПИКСЕЛЬНАЯ ОБРАБОТКА ИЗОБРАЖЕНИЙ ДЛЯ ИЗМЕРЕНИЯ ДАЛЬНОСТИ НА ОСНОВЕ ЦИФРОВОЙ ФОТОКАМЕРЫ" в журнале "Методы измерения, контроля, диагностики", Козлов В.Л., 29.03.2012, стр.115-120 | |||
| US 5432594 A, 11.07.1995 | |||
| US 5751409 A, 12.05.1998 | |||
| US 5131740 A, 21.07.1992. | |||

