Изобретение относится к области информационно-измерительных систем и может быть использовано в целях навигации для определения собственных координат и ориентирования в локальной системе координат, образованной тремя равноудаленными друг от друга источниками света, мигающими с заданными частотами.
Известен геодезические прибор – электронный тахеометр [1], предназначенный для измерения расстояний, горизонтальных и вертикальных углов, который может быть использован для определения собственных координат методом обратной однократной угловой засечки, путем измерения углов между направлениями на три опорных пункта с известными координатами.
Недостатками этого прибора являются необходимость в предварительном определении координат каждого опорного пункта, отсутствие у тахеометра способности автоматически обнаруживать и отличать эти пункты друг от друга, а также длительное время определения собственных координат, обусловленное неспособностью тахеометра одновременно измерять углы между несколькими направлениями на опорные пункты. Кроме этого, для обнаружения отражательных призм, которыми обозначают опорные пункты, в тахеометре используется источник лазерного излучения не безопасный для органов зрения человека.
Наиболее близким к предлагаемой системе является фотограмметрическая система для определения параметров геометрии рельсовой колеи [2], состоящая из штатива с трегером, обеспечивающим горизонтирование закрепляемой на нем двухосевой платформы, на которой размещены цифровая фотокамера и лазерный дальномер. Направление главной оптической оси фотокамеры определяется с помощью абсолютных оптических энкодеров, находящихся на осях платформы. Данная система обнаруживает визирные цели и определяет их координаты. При этом отслеживание визирных целей и наведение производится системой автоматически в режиме реального времени. Недостатком этой системы является отсутствие способности идентификации визирных целей и одновременного отслеживания нескольких визирных целей, что не позволяет использовать её для определения собственных координат в режиме реального времени.
Достигаемый технический результат заключается в обеспечении возможности автоматически отслеживать одновременно до трех источников света, которые размещены на известном расстоянии друг от друга, измерении углов между направлениями на них и определении в режиме реального времени собственных координат в локальной системе координат, образованной этими источниками света.
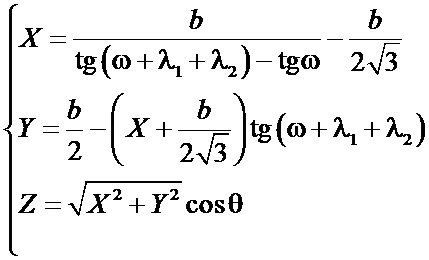
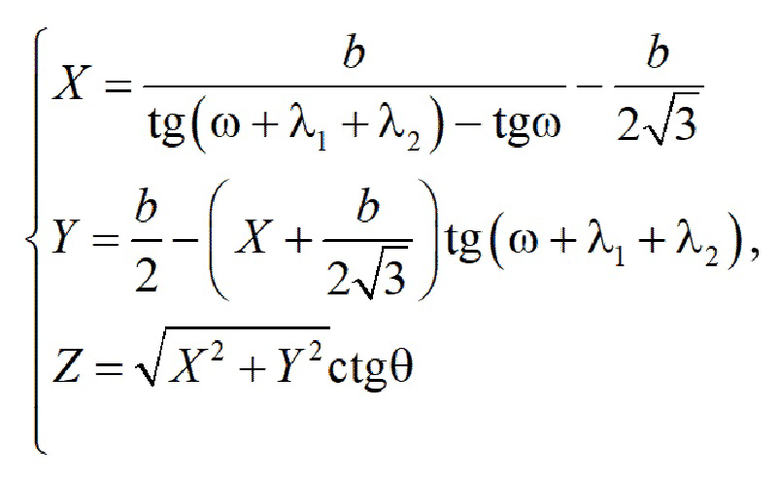
Технический результат достигается благодаря размещению на гиростабилизированной платформе вдоль вертикальной оси вращения трех цифровых видеокамер, последовательно соединенных с блоком поворота видеокамер, блоком анализа видеоизображений, вычислительным блоком, контроллером и блоком обмена данными, объединенных в единую систему. Блок поворота видеокамер, обеспечивает независимое вращение видеокамер вокруг вертикальной оси. Направление вектора главной оптической оси этих видеокамер определяется с помощью оптических энкодеров, находящихся на оси платформы. Такая конструкция системы позволяет обнаруживать источники света, идентифицировать их по частоте мигания, измерять углы между направлениями на них и определять собственные координаты в зоне прямой видимости трех источников света, размещаемым на горизонтальной плоскости, на равном расстоянии друг от друга и излучающим видимый свет с известными частотами мигания. При этом собственные координаты определяются из системы уравнений:
 ,
,
где b – базисное расстояние между источниками света;
λ1 – горизонтальный угол между направлениями на первый и второй источники света;
λ2 – горизонтальный угол между направлениями на второй и третий источники света;
ω – дирекционный угол;
θ – зенитный угол.
Свойство, появляющееся у заявляемой системы – определение собственных локальных координат относительно трех источников света с неизвестными координатами, равноудаленных друг от друга на известное расстояние. При этом координаты системы определяются из любой точки пространства, в пределах прямой видимости этих источников света.
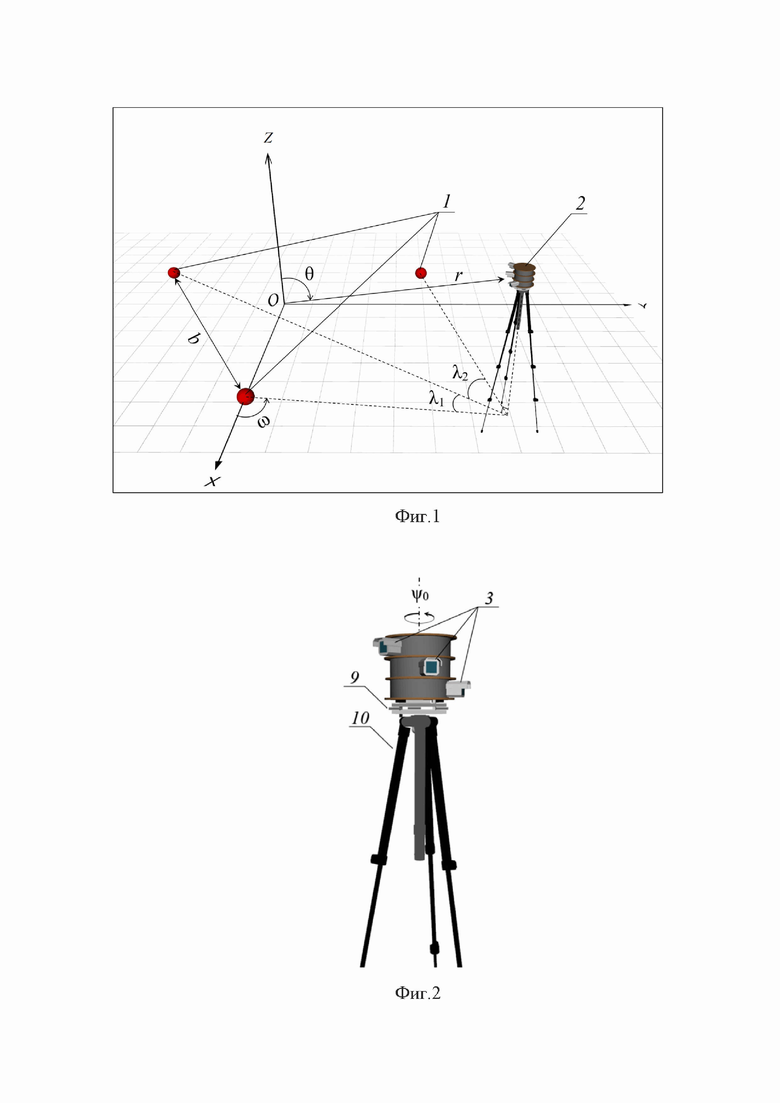
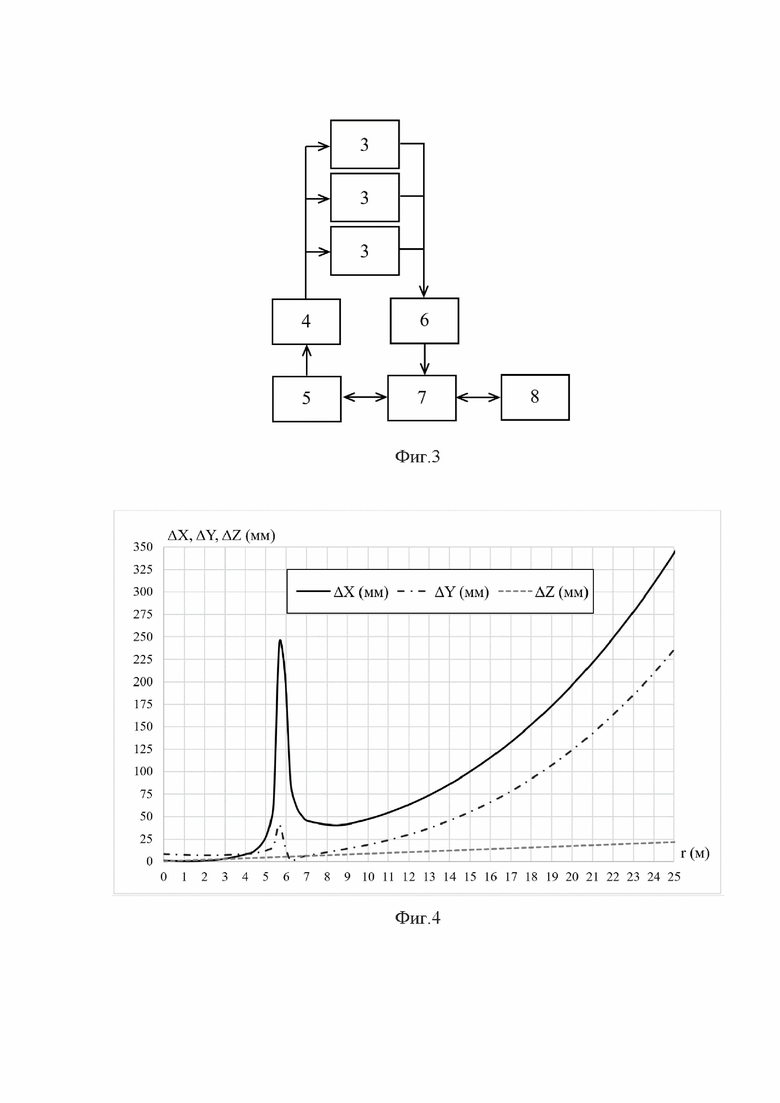
Сущность изобретения поясняется с помощью чертежей, где на фиг. 1 представлена принципиальная схема определения локальных координат видеограмметрической системы, на фиг. 2 изображен внешний вид видеограмметрической системы на штативе, на фиг. 3 представлена функциональная схема видеограмметрической системы, на фиг. 4 приведены графики погрешностей определения собственных координат видеограмметрической системой.
Видеограмметрическая система 2 содержит: три цифровые видеокамеры 3, блок поворота видеокамер 4, контроллер 5, блок обработки видеоизображений 6, вычислительный блок 7, блок обмена данными 8.
Определение собственных координат видеограмметрической системы осуществляется следующим образом. Источники света размещаются в горизонтальной плоскости на равном расстоянии друг от друга. Они образуют локальную систему координат XYZ с началом координат O в геометрическом центрe этих источников света (фиг. 1). При этом ось OX данной системы координат проходит через центр одного из источников света. Каждый источник света Vi имеет отличительную частоту мигания νi (где i – индекс источника света), излучая видимый свет в заданном диапазоне длин электромагнитных волн.
Видеограмметрическая система 2 устанавливается на штативе 10 с трегером 9 в произвольной точке пространства (фиг. 2), в зоне прямой видимости источников света 1. Управление видеограмметрической системой (фиг. 3) выполняется дистанционно по беспроводному каналу связи с помощью блока обмена данными 7. Поиск источников света 1 осуществляется автоматически с помощью контроллера 5, управляющим блоком поворота видеокамер 4, который изменяет направления обзора видеокамер 3 с угловым шагом, не превышающим их углы обзора. При попадании источника света 1 в поле зрения одной из видеокамер 3 полученное цифровое видеоизображение источника света поступает в блок обработки видеоизображений 6, где производится его идентификация. В вычислительном блоке 7 измеряются углы направления на источник света. Контроллер 5 обеспечивает одновременное отслеживание до трех источников света 1 в режиме реального времени. После обнаружения и идентификации трех источников света 1, по измеренным углам направлений на них, вычислительный блок 7 определяет собственные координаты видеограмметрической системы 2. Полученные результаты передаются по беспроводному каналу связи приемному устройству с помощью блока обмена данными 8. Определение собственных координат видеограмметрической системы производится по следующему алгоритму.
Вначале выполняется поиск источников света посредством изменения направления обзора видеокамер ψ0. Блок анализа видеоизображений обрабатывает цифровые видеоизображения, поступающие с видеокамер, и обнаруживает на них источников света по таким визуальным признакам, как форма источника света, цвет излучаемого им видимого света, частота мигания. Для идентификации источников света определяется частота изменения яркости пикселов на видеоизображении. За период времени идентификации t обрабатывается N кадров с изображением источника света Vi, яркость пикселов которого выражается функцией  . Частота W изменения яркости пиксела на видеоизображении определяется как количество значимых изменений яркости за этот период:
. Частота W изменения яркости пиксела на видеоизображении определяется как количество значимых изменений яркости за этот период:
 (1)
(1)
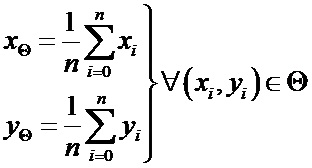
На видеоизображении фиксируются только те координаты пикселов (x, y), при которых значения частоты  совпадают со значениями из заданного набора частот мигания источников света (ν1, ν2 ν3). В процессе цифровой обработки изображения выделяется множество Θ, состоящее из n связанных друг с другом пикселов, цвет и частота изменения яркости которых находятся в заданных диапазонах значений. Координаты источника света на изображении (xΘ, yΘ) определяются как среднее арифметическое значение координат (xi, yi) составлявших его пикселов:
совпадают со значениями из заданного набора частот мигания источников света (ν1, ν2 ν3). В процессе цифровой обработки изображения выделяется множество Θ, состоящее из n связанных друг с другом пикселов, цвет и частота изменения яркости которых находятся в заданных диапазонах значений. Координаты источника света на изображении (xΘ, yΘ) определяются как среднее арифметическое значение координат (xi, yi) составлявших его пикселов:
 (2)
(2)
После обнаружения и идентификации всех источников света по их частоте мигания (ν1, ν2 ν3) вычисляется угловое положение этих источников света, задаваемое вертикальным углом ω и горизонтальным углом ψ. Для этого все источники света представляются в виде циклической последовательности  в порядке их обнаружения и вычисляются их горизонтальные углы из выражения:
в порядке их обнаружения и вычисляются их горизонтальные углы из выражения:
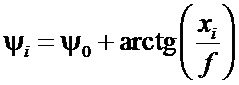 , (3)
, (3)
где xi – абсцисса источника света i на изображении;
f – фокусное расстояние видеокамеры.
Далее вычисляется модуль разности между горизонтальными углами для каждой пары источников света в этой последовательности:
 (4)
(4)
Затем данная последовательность упорядочивается путём нахождения индекса первого элемента, имеющего наибольшее значение модуля разности горизонтальных углов с помощью условия:
 (5)
(5)
В результате получают упорядоченный кортеж источников света  . Тогда λ1 и λ2 будут обозначать горизонтальные углы
. Тогда λ1 и λ2 будут обозначать горизонтальные углы  и
и  между направлениями на эти источники света, соответственно. Дирекционный угол источника света V1 в полученном кортеже вычисляется из выражения:
между направлениями на эти источники света, соответственно. Дирекционный угол источника света V1 в полученном кортеже вычисляется из выражения:
 (6)
(6)
После этого определяется плановое положение видеограмметрической системы из системы уравнений:
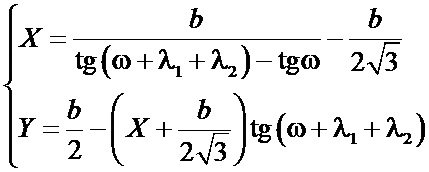 (7)
(7)
Вертикальные углы источников света определяются из выражения:
 (8)
(8)
где yi – ордината источника света i на изображении.
Зенитный угол θ видеограмметрической системы находится из выражения:
 , (9)
, (9)
где θi – вертикальный угол;
Xi, Yi – координаты источников света:
 (10)
(10)
Высотное положение видеограмметрической системы определяется из выражения:
 (11)
(11)
Для примера видеограмметрическая система комплектовалась тремя беспроводными цифровыми видеокамерами с типом сенсора CMOS, обладающими следующими техническими характеристиками: разрешение 1280x960 рх, фиксированное фокусное расстояние объектива видеокамер 4.4 мм, угол обзора 60°, частота смены кадров видеоизображения 30 Гц. Также использовались три источника света с разными частотами мигания (4, 8, 12 Гц), которые были установлены в горизонтальной плоскости на базисном расстоянии друг от друга b = 10 м. Произведена оценка погрешностей определения собственных локальных координат видеограмметрической системы (ΔX, ΔY, ΔZ) в радиусе r от начала координат (фиг. 4).
Источники информации
1. Справочник геодезиста. Книга 2 / Под ред. В. Д. Большакова и Г. П. Левчука. – 3-е изд., перераб. и доп. – М.: Недра, 1985. – 440 c.
2. Патент РФ № 2686341, МПК B61K 9/08, на изобретение «Способ определения параметров геометрии рельсовой колеи и система для его осуществления».
Изобретение относится к области информационно-измерительных систем и может быть использовано для решения задач навигации и ориентирования в пространстве. Заявленная система для определения собственных координат по трем источникам света содержит: три цифровые видеокамеры, размещённые на штативе с трегером вдоль вертикальной оси вращения; блок поворота видеокамер, обеспечивающий независимое вращение видеокамер вокруг вертикальной оси; контроллер; блок обработки видеоизображений; вычислительный блок; блок обмена данными. Направление вектора главной оптической оси видеокамер определяется с помощью оптических энкодеров на оси платформы. Конструкция системы позволяет обнаруживать источники света, идентифицировать их по частоте мигания, измерять углы между направлениями на них и определять собственные координаты в зоне прямой видимости источников света. Технический результат заключается в одновременном автоматическом отслеживании до трех источников света, размещённых на известном расстоянии друг от друга, измерении углов между направлениями на них и определении в режиме реального времени собственных координат в локальной системе координат источников света. 4 ил.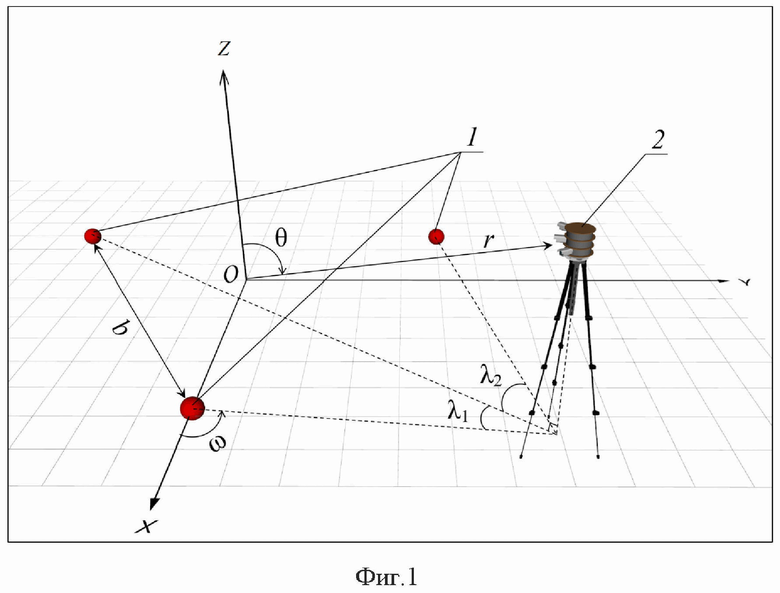
Видеограмметрическая система для определения собственных координат по трём источникам света, состоящая из трёх цифровых видеокамер, последовательно соединенных с блоком поворота видеокамер, блоком анализа видеоизображений, вычислительным блоком, контроллером и блоком обмена данными, объединенным в единую систему, отличающуюся тем, что видеокамеры установлены на штативе с трегером вдоль одной вертикальной оси вращения, позволяя в режиме реального времени определять собственные координаты системы в зоне прямой видимости трёх источников света, расположенным на горизонтальной плоскости, на равном расстоянии друг от друга и излучающим видимый свет с известными частотами мигания, при этом собственные координаты определяются из системы уравнений:
где b – базисное расстояние между источниками света;
λ1 – горизонтальный угол между направлениями на первый и второй источники света;
λ2 – горизонтальный угол между направлениями на второй и третий источники света;
ω – дирекционный угол;
θ – зенитный угол.
| СПОСОБ КАЛИБРОВКИ ВИДЕОГРАММЕТРИЧЕСКИХ СИСТЕМ И КОНТРОЛЬНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645432C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ В РАСПРЕДЕЛЕННОЙ СИСТЕМЕ АКУСТИЧЕСКОГО И ВИДЕОНАБЛЮДЕНИЯ | 2015 |
|
RU2601402C2 |
| СПОСОБ БЕСКОНТАКТНЫХ ИЗМЕРЕНИЙ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2551396C1 |
| Способ разработки мощных угольных пластов с закладкой | 1990 |
|
SU1710750A1 |
| US 20170094251 A1, 30.03.2017. | |||

