ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка притязает на приоритет заявки на патент США № 14/203,550, поданной 10 марта 2014 г., которая притязает на приоритет согласно требованиям статьи 35 120 кодекса США как продолжение части заявки на патент США 3 13/843,942, поданной 15 марта 2013 г., каждая из которых полностью включена в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение относится к передаче данных между подводными объектами, в частности при высоких скоростях передачи данных.
УРОВЕНЬ ТЕХНИКИ
[0003] Настоящий раздел, описывающий уровень техники, представлен только с информационной целью, и его не следует рассматривать как подтверждение того, что какой-либо из материалов, содержащихся в данном разделе, соответствует предшествующему уровню техники для настоящей заявки.
[0004] Существует необходимость в передаче данных между двумя отдельными подводными объектами в областях применения, включающих оборону, океанографию, разработку углеводородов и др. В обычных способах передачи данных между подводными объектами используют либо привязная линия связи, использующая медный или оптико-волоконный кабель, либо связь, основанная на передаче звука. Согласно предшествующему подходу, подводные объекты должны быть переустановлены или восстановлены на месте, при этом последний подход имеет очень низкую скорость передачи данных (обычно от 1 до 20 килобит в секунду), что в настоящее время возможно с использованием передачи звука. Подход, в котором используется свет, свободно распространяющийся в океанской среде, будет обеспечивать гораздо более высокие скорости передачи данных и обеспечивать возможность удобного обмена данными между произвольными парами передающих и приемных устройств (приемопередатчиков).
[0005] Некоторые попытки осуществить передачу данных между подводными объектами с использованием оптических устройств потерпели неудачу из-за отсутствия подходящих источников света. Распространение света через воду ограничено вследствие свойства собственного поглощения чистой воды, рассеяния твердых частиц, таких как планктон и неорганические твердые частицы, и поглощения фитопланктоном, содержащим хлорофилл, и другими органическими материалами. Компоненты объединяются в различных сочетаниях, чтобы способствовать сильному пропусканию света в сине-зеленой области оптического спектра, примерно от 400 до 600 нм. Оптический эффект от различных сочетаний компонентов, смешанных в воде, можно суммировать как типы и диапазон воды от очень чистых природных вод, которые способствуют глубокому распространению синего спектра (номинально 450 нм), до вод, которые способствуют распространению сине-зеленого спектра (номинально 490 нм) и зеленого спектра (номинально 530 нм). Минимальные коэффициенты оптического затухания при оптимальных длинах волн изменяются примерно от 0,02 m-1 для самых чистых природных вод до более чем 2 m-1 в самых мутных прибрежных или портовых водах.
[0006] Предшествующие источники света, включающие диапазон сине-зеленых длин волн, были громоздкими, неэффективными, дорогими и использовали внешние модуляторы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] По меньшей мере один аспект направлен на способ выполнения сейсмической разведки в водной среде. В некоторых вариантах осуществления способ включает в себя прием данных о подводной окружающей среде от первого блока установленного на дне океана сейсмометра (OBS-сейсмометра). Первый блок OBS-сейсмометра может быть расположен в водной среде. Способ может включать в себя модуль преобразования данных блока OBS-сейсмометра, преобразующий данные о подводной среде в оптический сигнал, имеющий первый формат. Первый формат может обеспечивать оптическую передачу данных в водной среде. Способ может включать в себя оптический передатчик блока OBS-сейсмометра, передающий оптический сигнал в первом формате через водную среду. Данный способ может включать в себя оптический приемник дистанционно управляемого транспортного средства (ROV) и/или автономного подводного транспортного средства (AUV), принимающих оптический сигнал, передаваемый через водную среду. Способ может включать с себя дистанционно управляемое транспортное средство (ROV) и/или автономное подводное транспортное средство (AUV), преобразующие оптический сигнал, передаваемый через водную среду, в неоптический сигнал, имеющий второй формат. Способ может включать в себя дистанционно управляемое транспортное средство (ROV) и/или автономное подводное транспортное средство (AUV), передающие неоптический сигнал во втором формате на морское судно.
[0008] В некоторых вариантах осуществления способ может включать в себя преобразование оптического сигнала в неоптический сигнал, обеспечивающий проводную передачу данных на морское судно. Способ может включать в себя передачу неоптического сигнала на морское судно по кабелю. В некоторых вариантах осуществления оптический приемник может включать в себя первый оптический приемопередатчик, а оптический передатчик может включать в себя второй оптический приемопередатчик. В некоторых вариантах осуществления неоптический сигнал, передаваемый от дистанционно управляемого транспортного средства (ROV) и/или автономного подводного транспортного средства (AUV) на морское судно, включает в себя электрический сигнал.
[0009] В некоторых вариантах осуществления блок OBS-сейсмометра представляет собой первый блок OBS-сейсмометра, оптический сигнал представляет собой первый оптический сигнал, а геофон представляет собой первый геофон. В данном варианте осуществления способ может включать в себя второй блок OBS-сейсмометра, передающий второй оптический сигнал на первый блок OBS-сейсмометра через водную среду. Второй оптический сигнал может быть основан на данных о подводной окружающей среде, полученных вторым блоком OBS-сейсмометра. Способ может включать в себя первый блок OBS-сейсмометра, принимающий второй оптический сигнал для передачи на дистанционно управляемое транспортное средство (ROV) и/или автономное подводное транспортное средство (AUV).
[0010] В некоторых вариантах осуществления способ включает в себя по меньшей мере одно из блока OBS-сейсмометра, дистанционно управляемого транспортного средства (ROV) и автономного подводного транспортного средства (AUV), определяющее характеристики водной среды. Способ может включать в себя регулирование параметра, связанного с оптическим сигналом, на основании характеристики водной среды. В некоторых вариантах осуществления характеристика содержит по меньшей мере одно из следующего: показатель мутности, качество воды, течение воды и непрозрачность. В некоторых вариантах осуществления параметр включает в себя по меньшей мере одно из следующего: скорость передачи данных оптического сигнала, выходная интенсивность оптического сигнала, длина волны оптического сигнала и коэффициент усиления приемника.
[0011] В некоторых вариантах осуществления способ включает в себя введение оптической линии связи между блоком OBS-сейсмометра и по меньшей мере одним из дистанционно управляемого транспортного средства (ROV) и автономного подводного транспортного средства (AUV). Способ может включать в себя блок OBS-сейсмометра, передающий первый оптический сигнал на дистанционно управляемое транспортное средство (ROV) и/или автономное подводное транспортное средство (AUV). Первый оптический сигнал может иметь первую скорость передачи данных. Способ может включать в себя определение того, что частота появления ошибочных битов первого сигнала удовлетворяет пороговому значению. Способ может включать в себя блок OBS-сейсмометра, передающий второй оптический сигнал на дистанционно управляемое транспортное средство (ROV) и/или автономное подводное транспортное средство (AUV). Второй оптический сигнал может иметь вторую скорость передачи, которая больше, чем первая скорость передачи, при этом вторая скорость может быть передана в ответ на определение того, что частота появления ошибочных битов удовлетворяет пороговому значению.
[0012] В некоторых вариантах осуществления способ включает в себя введение оптической линии связи между блоком OBS-сейсмометра и по меньшей мере одним из дистанционно управляемого транспортного средства (ROV) и автономного подводного транспортного средства (AUV). Способ может включать в себя блок OBS-сейсмометра, передающий первый оптический сигнал, имеющий первую скорость передачи данных, на дистанционно управляемое транспортное средство (ROV) и/или автономное подводное транспортное средство (AUV). Способ может включать в себя определение того, что частота появления ошибочных битов первого сигнала не удовлетворяет пороговому значению. Способ может включать в себя выбор второй скорости передачи данных, которая меньше, чем первая скорость передачи данных. Вторая скорость передачи данных может быть выбрана в ответ на определение того, что частота появления ошибочных битов не удовлетворяет пороговому значению. Способ может включать в себя передачу второго оптического сигнала, имеющего вторую скорость передачи данных.
[0013] В некоторых вариантах осуществления способ включает в себя введение оптической линии связи между блоком OBS-сейсмометра и по меньшей мере одним из дистанционно управляемого транспортного средства (ROV) и автономного подводного транспортного средства (AUV). Способ может включать в себя блок OBS-сейсмометра, передающий первый оптический сигнал, имеющий первую скорость передачи данных, на дистанционно управляемое транспортное средство (ROV) и/или автономное подводное транспортное средство (AUV). Способ может включать в себя определение того, что частота появления ошибочных битов первого сигнала не удовлетворяет пороговому значению. Способ может включать в себя автоматическое управление коэффициентом усиления. Автоматическое управление коэффициентом усиления может быть отрегулировано в ответ на определение того, что частота появления ошибочных битов не удовлетворяет пороговому значению.
[0014] В некоторых вариантах осуществления способ включает в себя блок OBS-сейсмометра, передающий оптический сигнал с помощью по меньшей мере одного из следующих: твердотельный источник света, источник света на основе InGaN, лазер и светоизлучающий диод (LED). В некоторых вариантах осуществления способ может включать себя блок OBS-сейсмометра, передающий данные посредством оптического сигнала со скоростью передачи данных по меньшей мере в 300 Мбит/с. В некоторых вариантах осуществления способ может включать в себя блок OBS-сейсмометра, передающий оптический сигнал с использованием метода канального кодирования. Метод канального кодирования может включать в себя по меньшей мере один из следующих: амплитудно-манипулированный формат, кодирование 8 бит/10 бит, фазово-импульсная дискриминация, квадратурная фазовая манипуляция (QPSK) и квадратурная амплитудная дискриминация. В некоторых вариантах осуществления способ может включать в себя блок OBS-сейсмометра, передающий оптический сигнал с использованием метода дискриминации пропускания с несколькими несущими, основанного на мультиплексировании с ортогональным частотным разделением (OFDM).
[0015] В некоторых вариантах осуществления данные о подводной окружающей среде включают в себя данные, показывающие по меньшей мере одно из следующего: сейсмическая активность, твердые вещества, растворенные в водной среде, минеральные вещества, растворенные в водной среде, состояние водной среды, концентрация кислорода в водной среде, концентрация соли в водной среде, концентрация планктона в водной среде, мутность водной среды и наличие животных организмов в водной среде.
[0016] В некоторых вариантах осуществления данные о подводной окружающей среде включают в себя сейсмические данные, а способ включает в себя прием сейсмических данных с использованием геофона первого блока устанавливаемого на дне океана сейсмометра (OBS), расположенного в водной среде.
[0017] В некоторых вариантах осуществления блок OBS-сейсмометра представляет собой первый блок OBS-сейсмометра, а способ включает в себя прием, с помощью оптического приемника второго блока OBS-сейсмометра, оптического сигнала от первого блока OBS-сейсмометра. Способ может включать в себя оптический передатчик второго блока OBS-сейсмометра, передающий оптический сигнал на дистанционно управляемое транспортное средство (ROV) и/или автономное подводное транспортное средство (AUV). В некоторых вариантах осуществления данные о подводной окружающей среде включают в себя сейсмические данные, а способ включает в себя прием сейсмических данных с использованием акселерометра, расположенного в блоке OBS-сейсмометра.
[0018] По меньшей мере один аспект направлен на систему для выполнения сейсмической разведки в водной среде. В некоторых вариантах осуществления система может включать в себя первый блок установленного на дне океана сейсмометра (OBS-сейсмометра), расположенный в водной среде. Первый блок OBS-сейсмометра может быть выполнен с возможностью приема данных о подводной окружающей среде. Система может включать в себя первый модуль преобразования данных блока OBS-сейсмометра. Первый модуль преобразования данных может быть выполнен с возможностью преобразования данных о подводной окружающей среде в оптический сигнал, имеющий первый формат. Первый формат может обеспечивать оптическую передачу данных в водной среде. В некоторых вариантах осуществления система может включать в себя оптический передатчик блока OBS-сейсмометра. Оптический передатчик может быть выполнен с возможностью передачи оптического сигнала в первом формате через водную среду. В некоторых вариантах осуществления система может включать в себя оптический приемник дистанционно управляемого транспортного средства (ROV) и/или автономного подводного транспортного средства (AUV). Оптический приемник может быть выполнен с возможностью приема оптического сигнала, передаваемого через водную среду. Система может включать в себя второй модуль преобразования данных дистанционно управляемого транспортного средства (ROV) и/или автономного подводного транспортного средства (AUV). Второй модуль преобразования данных может быть выполнен с возможностью преобразования оптического сигнала, передаваемого через водную среду, в неоптический сигнал, имеющий второй формат. Система может включать в себя передатчик дистанционно управляемого транспортного средства (ROV) и/или автономного подводного транспортного средства (AUV). Передатчик может быть выполнен с возможностью передачи неоптического сигнала во втором формате от дистанционно управляемого транспортного средства (ROV) и/или автономного подводного транспортного средства (AUV) на морское судно.
[0019] По меньшей мере один аспект настоящего изобретения направлен на устройство для передачи и приема данных оптическим образом через водную среду. В некоторых вариантах осуществления устройство включает в себя оптический передатчик. Устройство может также включать в себя оптический приемник. Передатчик и приемник могут функционировать с использованием света с длинами волн в диапазоне 400-600 нм.
[0020] В одном варианте осуществления оптический передатчик и оптический приемник устройства заключены в водонепроницаемый контейнер. Оптический контейнер может включать в себя одно или более оптических окон. Свет может пропускаться через одно или более оптических окон через водонепроницаемый контейнер в водную среду и из нее.
[0021] В одном варианте осуществления оптический передатчик включает в себя по меньшей мере один твердотельный источник света.
[0022] В одном варианте осуществления источник света представляет собой источник света на основании соединения InGaN.
[0023] В одном варианте осуществления источник света включает в себя светоизлучающий диод.
[0024] В одном варианте осуществления источник света включает в себя лазер.
[0025] В одном варианте осуществления устройство выполнено с возможностью передачи данных со скоростью около 10 Мбит/с или больше.
[0026] В одном варианте осуществления устройство выполнено с возможностью передачи данных со скоростью около 100 Мбит/с или больше.
[0027] В одном варианте осуществления устройство включает в себя управляющее устройство, выполненное с возможностью модуляции выхода светового источника. Управляющее устройство может модулировать выход светового источника путем изменения управляющего тока к источнику.
[0028] В одном варианте осуществления оптический приемник включает в себя фотодиод.
[0029] В одном варианте осуществления оптический приемник включает в себя по меньшей мере один из элементов списка, включающего: кремниевый фотодиод, кремниевый PIN-фотодиод, и лавинный фотодиод, и гибридный фотодиод.
[0030] В одном варианте осуществления оптический приемник включает в себя фотоэлектронный умножитель.
[0031] В одном варианте осуществления оптический приемник включает в себя микроканальную пластину, выполненную с возможностью определения частиц, таких как фотоны.
[0032] В одном варианте осуществления фотоэлектронный умножитель включает в себя множество усилительных каскадов. Выходной сигнал может быть снят с каскада усиления до конечного каскада усиления.
[0033] В одном варианте осуществления оптический приемник выполнен с возможностью использования измерения уровня оптического сигнала для управления коэффициентом усиления усилителя, следующего за оптическим детектором.
[0034] В одном варианте осуществления оптический приемник выполнен с возможностью использования измерения уровня оптического сигнала для управления коэффициентом усиления оптического детектора.
[0035] В одном варианте осуществления устройство включает в себя по меньшей мере одно управляющее устройство, функционально связанное с одним или обоими из элементов, передатчиком и приемником. Управляющее устройство может быть выполнено с возможностью осуществления метода канального кодирования во время передачи/
[0036] В одном варианте осуществления устройства включают в себя по меньшей мере одно управляющее устройство, функционально соединенное с передатчиком и/или приемником. Управляющее устройство может быть выполнено с возможностью динамического регулирования одного или более параметров передачи. Управляющее устройство может динамически регулировать параметры передачи в соответствии с одним или более определенных условий передачи.
[0037] В одном варианте осуществления динамическое регулирование одного или больше параметров передачи включает в себя управление коэффициентом усиления одного или больше элементов усилителя в устройстве.
[0038] В одном варианте осуществления устройство включает в себя по меньшей мере одно управляющее устройство, функционально связанное с одним или обоими из элементов, передатчиком и приемником. Управляющее устройство может быть выполнено с возможностью осуществления методов дискриминации пропускания с несколькими несущими.
[0039] В одном варианте осуществления метод дискриминации может включать в себя мультиплексирование с ортогональным частотным разделением (Orthogonal Frequency Division Multiplexing, OFDM) на оптической основе.
[0040] В одном варианте осуществления приемопередатчик выполнен с возможностью входа в состояние включения питания в соответствии с определенным наличием другого устройства передачи данных.
[0041] В одном варианте осуществления устройство включает в себя управляющее устройство, выполненное с возможностью согласования локального приемопередатчика с удаленным приемопередатчиком. Управляющее устройство может согласовывать локальный приемопередатчик с удаленным приемопередатчиком на основе сигнала от одного или больше оптических детекторов, которые могут воспринимать относительный угол удаленного приемопередатчика.
[0042] В одном варианте осуществления устройство включает в себя управляющее устройство, выполненное с возможностью согласования локального приемопередатчика с удаленным приемопередатчиком на основе сигнала от одного или больше датчиков, используемых для определения относительного положения удаленного приемопередатчика.
[0043] В одном варианте осуществления управляющее устройство выполнено с возможностью управления платформой для устройства на основании по меньшей мере частично определенных данных о положении.
[0044] В одном варианте осуществления устройство включает в себя управляющее устройство, выполненное с возможностью управления множеством передающих источников для направления света к удаленному приемопередатчику. Управляющее устройство может управлять множеством передающих источников на основании сигнала от одного или больше оптических детекторов, используемых для определения относительного угла удаленного приемопередатчика.
[0045] В одном варианте осуществления устройство включает в себя управляющее устройство, выполненное с возможностью выбора анода в многоанодном фотоэлектронном умножителе и согласования углового поля обзора локального приемника с удаленным приемопередатчиком. Управляющее устройство может выбирать анод и согласовывать угловое поле обзора локального приемника на основании сигнала от одного или больше оптических детекторов, которые используются для определения относительного угла удаленного приемопередатчика.
[0046] В одном варианте осуществления устройство содержит управляющее устройство, выполненное с возможностью доставлять команды-инструкции к платформе, на которой смонтировано устройство. Для определения относительного угла удаленного приемопередатчика может быть использован один или больше оптических детекторов.
[0047] В одном варианте осуществления устройство встроено в чисто оптическую систему для передачи сейсмических данных.
[0048] В одном варианте осуществления для улавливания пропускаемого оптического пучка используется один или больше дифракционных оптических элементов.
[0049] В одном варианте осуществления для управления оптическим пропускаемым пучком используется один или больше дифракционных оптических элементов.
[0050] В одном варианте осуществления для формирования оптического пропускаемого пучка используется один или больше дифракционных оптических элементов.
[0051] В одном варианте осуществления устройство смонтировано на или в одном из элементов группы, состоящей из: дистанционно управляемого транспортного средства, автономно управляемого транспортного средства, подводного судна и устанавливаемого на дне океана сейсмического узла.
[0052] В одном варианте осуществления устройство включает в себя акустическое устройство связи.
[0053] По меньшей мере один аспект направлен на способ, который включает в себя оптическую передачу данных через водную среду с использованием света с длинами волн в диапазоне 400 нм - 600 нм.
[0054] В одном варианте осуществления способ включает в себя генерацию света с использованием по меньшей мере одного твердотельного источника света.
[0055] В одном варианте осуществления способа источник света включает в себя светоизлучающий диод.
[0056] В одном варианте осуществления источник света включает в себя лазер.
[0057] В одном варианте осуществления этап оптической передачи данных включает в себя передачу данных со скоростью по меньшей мере около 10 Мбит/с.
[0058] В одном варианте осуществления этап оптической передачи данных включает в себя передачу данных со скоростью по меньшей мере 100 Мбит/с.
[0059] В одном варианте осуществления этап оптической передачи данных включает в себя использование одного или больше методов канального кодирования.
[0060] В одном варианте осуществления этап оптической передачи данных включает в себя динамическое регулирование одного или больше параметров передачи. Параметры передачи могут быть динамически отрегулированы в соответствии с одним или больше определенных условий передачи.
[0061] В одном варианте осуществления этап оптической передачи данных включает в себя осуществление метода дискриминации пропускания с несколькими несущими.
[0062] В одном варианте осуществления метод дискриминации включает в себя мультиплексирование с ортогональным частотным разделением (Orthogonal Frequency Division Multiplexing, OFDM) на оптической основе.
[0063] В некоторых вариантах осуществления выходной оптический передаваемый сигнал может быть передан посредством оптоволоконной связи к окну. В некоторых вариантах осуществления множество оптических волокон может быть объединено в волоконно-оптический кабель и сужено на одном конце (например, при диаметре 1 мм на одном и 1 см на другом конце), так что оптический сигнал может быть передан через окно.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0064] На фиг. 1 приведен схематический вид в изометрии одного варианта осуществления сейсморазведочных работ в глубинной воде.
[0065] На фиг. 2 приведена структурная схема, отображающая работу иллюстративной пары приемопередатчиков, поддерживающих связь друг с другом.
[0066] На фиг. 3 приведена иллюстрация иллюстративной пары приемопередатчиков.
[0067] На фиг. 4 приведена иллюстрация линз приемника и соответствующего контура.
[0068] На фиг. 5-9 приведены структурные схемы иллюстративных вариантов осуществления приемопередатчиков.
[0069] На фиг. 10 приведена иллюстративная система для выполнения сейсморазведки в водной среде с использованием оптической передачи в соответствии с одним вариантом осуществления.
[0070] На фиг. 11 приведена иллюстрация способа для выполнения сейсмической разведки в водной среде с использованием оптической передачи в соответствии с одним вариантом осуществления.
[0071] На фиг. 12 приведена иллюстрация системы энергоснабжения оптической системы для выполнения сейсмической разведки в водной среде.
ПОДРОБНОЕ ОПИСАНИЕ
[0072] Заявители установили, что могут быть выполнены оптические приемопередатчики данных, работающие в водной среде, такой как морская среда, в которой выполняется сейсмическая разведка. В некоторых вариантах осуществления приемопередатчики работают с высокими скоростями передачи данных, например, больше чем примерно 1 мегабит в секунду (Мбит/с), около 10 Мбит/с, около 100 Мбит/с, около 300 Мбит/с или больше (например, вплоть до или свыше 1 Гбит/с). В некоторых вариантах осуществления системы и способы могут использовать изменяемую, асимметричную связь, в которой первый оптический сигнал имеет первую скорость передачи данных, а второй оптический сигнал имеет вторую скорость передачи данных, отличающуюся от первого оптического сигнала.
[0073] В некоторых вариантах осуществления устройства используют источники света, например, лазерные источники света или источники со светоизлучающими диодами (light emitting diode, LED), с выходными сигналами в сине-зеленой области спектра, например, с длинами волн в диапазоне 400-600 нм или каком-либо его поддиапазоне.
[0074] Например, в некоторых вариантах осуществления твердотельные излучатели света, например, на основе полупроводниковых материалов нитридов индия-галлия (InGaN) в настоящее время образует семейство источников света в сине-зеленой области спектра, которые являются эффективными, компактными, долговечными и могут быть с прямой модуляцией (их оптическая выходная мощность регулируется величиной электрического тока в устройстве). Такие устройства могут работать на длинах волн в сине-зеленой области. Поскольку такие устройства могут быть выполнены с прямой модуляцией, например с помощью модуляции управляющего тока, они могут быть выстроены в виде матрицы для увеличения выходной мощности или для передачи в других пространственных направлениях, например, между платформами с относительным перемещением.
[0075] В некоторых вариантах осуществления приемная часть устройства приемопередатчика включает в себя один или больше оптических детекторов, чувствительных к сине-зеленой области спектра, которые могут быть компактными и надежными. Примеры включают в себя детекторы, использующие полупроводниковые переходы, такие как PN переходы или PIN переходы (например, кремниевые PIN фотодиоды или лавинные фотодиоды). Например, в некоторых вариантах осуществления могут использоваться лавинные фотодиоды, которые при соответствующем приложенном электрическом напряжении смещения проявляют электронное усиление, что может быть полезно в некоторых вариантах реализации. Фотоэлектронные умножители также могут быть использованы в сине-зеленой области и обладают преимуществом, как лавинные фотодиоды, электронного усиления, управляемого напряжением, а также быстрого временного отклика даже при больших приемных зонах.
[0076] В некоторых вариантах осуществления активная или фоточувствительная зона оптического детектора устанавливает одновременно ограничения на приемную зону линзы приемника и на угловую область, в которой свет, перехваченный линзой приемника, фактически попадает на детектор (угловое поле обзора). В некоторых вариантах применении, особенно там, где одна или другая подводная платформа является маневрирующей, угловое поле обзора, возможное при оптимальных по времени детекторах, будет слишком малым для поддержания соединения связи. Кроме того, может быть полезным уменьшение углового расхождения пучка передатчика с целью повышения перехваченной мощности на удаленном приемнике. В данном случае может быть выгодно монтировать передатчик и приемник на контролируемых опорах (например, универсальных шарнирах), или создать механизм (например, электрический или электромеханический механизм) для выходного пучка передатчика и/или области обзора приемника, чтобы отслеживать удаленный передатчик и приемник. Команды-инструкции для перемещения передатчика и приемника могут быть созданы с использованием, например, системы оптических детекторов или многоэлементного детектора с соответствующей обработкой сигнала, чтобы интерпретировать различные уровни освещенности от удаленного передатчика и направлять движение пучка передатчика и область обзора приемника.
[0077] На фиг. 1 приведен схематический вид в изометрии одного варианта осуществления сейсморазведочных работ в глубинной воде при содействии первого морского судна 5. Первое судно 5 расположено на поверхности 10 водяной толщи 15 и включает в себя палубу 20, несущую рабочее оборудование. По меньшей мере часть палубы 20 содержит пространство для множества стоек 90 сенсорных устройств, где хранятся сейсмические сенсорные устройства. Стойки 90 сенсорных устройств могут также содержать устройства для сбора данных и/или зарядные устройства датчиков.
[0078] Палуба 20 также содержит один или больше кранов 25A, 25B, закрепленных на ней для облегчения перегрузки по меньшей мере части рабочего оборудования, такого как автономное подводное транспортное средство (AUV), автономно управляемое транспортное средство (AOV), дистанционно управляемое транспортное средство (ROV) и/или сейсмические сенсорные устройства, с палубы 20 в водяную толщу 15. Например, кран 25A, связанный с палубой 20, выполнен с возможностью опускания и поднимания дистанционно управляемого транспортного средства 35A (ROV), которое перегружает и размещает одно или больше сенсорных устройств 30 (например, блока OBS-сейсмометра) на морском дне 55. Дистанционно управляемое транспортное средство 35A (ROV) связано с первым судном 5 посредством привязного троса 46A и шланга 44A жизнеобеспечения, который обеспечивает энергию, связь и управление для ROV 35A. Система управления привязным тросом (tether management system, TMS) 50A также подключена между шлангом 44A жизнеобеспечения и привязным тросом 46A. В общем, TMS 50A может быть использована в качестве промежуточной, подводной платформы, с которой управляют ROV 35A. Для большей части работ ROV 35A на морском дне 55 или вблизи него TMS 50A может быть расположена примерно на 50 футов (15,25 м) выше морского дна 55 и может травить привязной трос 46A по необходимости для свободного перемещения ROV 35A над морским дном 55, чтобы размещать и перегружать на него сейсмические сенсорные устройства 30.
[0079] Кран 25B связан с кормой первого судна 5, или другим местоположением на первом судне 5. Каждый из кранов 25A, 25B может представлять собой какое-либо подъемное устройство и/или спускоподъемное устройство (launch and recovery system, LARS), приспособленное для работы в морской окружающей среде. В данном варианте осуществления кран 25B соединен с перегрузочным устройством сейсмического датчика 100 посредством кабеля 70. Перегрузочное устройство 100 может представлять собой управляемый аппарат, конструкцию для спуска, корзину или какое-либо устройство, пригодное для того, чтобы вмещать в себя одно или больше сенсорных устройств30. Перегрузочное устройство 100 может представлять собой конструкцию, выполненную, как накопитель, пригодный, чтобы вмещать и транспортировать одно или больше сенсорных устройств 30. В одном варианте осуществления перегрузочное устройство 100 выполнено, как стойка для хранения сенсорных устройств, для перегрузки сенсорных устройств 30 из первого судна 5 в ROV 35A, и из ROV 35A в первое судно 5. Перегрузочное устройство 100 может содержать бортовой источник питания, двигатель или редуктор и/или движительную систему (не показана). При необходимости перегрузочное устройство 100 может не содержать никаких встроенных силовых устройств и/или не нуждаться во внешних или внутренних источниках энергии. При необходимости кабель 70 может обеспечивать питание и/или управление перегрузочного устройства 100. При необходимости кабель 70 может быть шлангом жизнеобеспечения, привязным тросом, шнуром, проволокой, канатом и т. п., который выполнен исключительно для удержания перегрузочного устройства 100.
[0080] ROV 35A содержит отсек 40 хранения сейсмического сенсорного устройства, который выполнен с возможностью хранения в нем одного или больше сейсмических сенсорных устройств 30 для операций развертывания и/или возврата. Отсек 40 хранения может представлять собой накопитель, стойку или контейнер, выполненный с возможностью хранения сейсмических сенсорных устройств. Отсек 40 хранения может включать в себя подвижную платформу, содержащую на себе сейсмические сенсорные устройства, такие как карусельная или линейная платформа, выполненная с возможностью поддержки и перемещения на ней сейсмических сенсорных устройств 30. В одном варианте осуществления сейсмические сенсорные устройства 30 могут быть развернуты на морском дне 55 и возвращены с него при посредстве работы подвижной платформы. В данном варианте осуществления ROV 35A может быть расположено в заданном местоположении над морским дном 55 или на нем, а сейсмические сенсорные устройства 30 катят, перемещают на конвейере или передвигают другим путем из отсека 40 для хранения в заданное местоположение. В другом варианте осуществления сейсмические сенсорные устройства 30 могут быть развернуты и возвращены из отсека 40 для хранения с помощью роботизированного устройства 60, такого как рука робота, рабочий орган или манипулятор, расположенный на ROV 35A.
[0081] Например, в операции развертывания первый ряд сейсмических сенсорных устройств, содержащих один или больше сенсорных датчиков 30, может быть загружен в отсек 40 для хранения, находясь на первом судне 5 в предпогрузочной операции. Средство ROV 35A, снабженное соединенным с ним отсеком для хранения, затем опускают в подводное положение в водяную толщу 15. ROV 35A использует команды персонала на первом судне 5 для работы в ходе перегрузки первого ряда сейсмических сенсорных устройств 30 из отсека 40 для хранения и развертывания отдельных сенсорных устройств 30 в выбранных местоположениях на морском дне 55. После того как отсек 40 для хранения освобожден от первого ряда сейсмических сенсорных устройств 30, перегрузочное устройство 100 используют для перегрузки второго ряда сейсмических сенсорных устройств 30 в качестве полезной нагрузки из первого судна 5 в ROV 35A.
[0082] Перегрузочное устройство 100 предварительно загружаю вторым рядом сейсмических сенсорных устройств 30, при нахождении на первом судне 5 или рядом с ним. Когда соответствующее число сейсмических сенсорных устройств 30 загружено в перегрузочное устройство 100, перегрузочное устройство 100 может быть опущено с помощью крана 25B на выбранную глубину в водяной толще 15. ROV 35A и перегрузочное устройство 100 стыкуют в подводном положении, чтобы обеспечить перегрузку второго ряда сейсмических сенсорных устройств 30 из перегрузочного устройства 100 в отсек 40 для хранения. Когда перегрузочное устройство 100 и средство ROV 35A состыковано, второй ряд сейсмических сенсорных устройств 30 содержащихся в перегрузочном устройстве 100, перегружают в отсек 40 для хранения ROV 35A. После того как отсек 40 для хранения загружен повторно, ROV 35A и перегрузочное устройство 100 рассоединяют или расстыковывают, и размещение сейсмического сенсорного устройства с помощью ROV 35A можно возобновить. В одном варианте осуществления повторная загрузку отсека 40 для хранения выполняют, пока передвигается первое судно 5. Если перегрузочное устройство 100 освобождено после перегрузки второго ряда сейсмических сенсорных устройств 30, перегрузочное устройство 100 может быть поднято с помощью крана 25B на судно 5, где в операции повторной загрузки заполняют перегрузочное устройство 100 третьим рядом сейсмических сенсорных устройств 30. Перегрузочное устройство 100 затем может быть опущено на выбранную глубину, когда отсек 40 для хранения нужно загрузить повторно. Данный процесс можно повторять по необходимости, пока не будет развернуто необходимое число сейсмических сенсорных устройств 30.
[0083] Использование перегрузочного устройства 100 для повторной загрузки ROV 35A в подводном положении уменьшает время, необходимое для размещения сейсмических сенсорных устройств30 на морском дне 55, или время «высадки», поскольку средство ROV 35A не поднимают и не опускают с поверхности 10 для повторной загрузки сейсмического сенсорного устройства. Кроме того, механические напряжения, прилагаемые к оборудованию, используемому для подъема и опускания ROV 35A, сведены к минимуму, поскольку ROV 35A может работать под поверхностью 10 в течение длительных периодов. Уменьшение подъемов и опусканий ROV 35A может быть особенно выгодным в плохую погоду и/или в условиях бурного моря. Благодаря этому срок службы оборудования может быть увеличен, так как ROV 35A и связанное оборудование не поднимают над поверхностью 10, что могло бы приводить к повреждению ROV 35A и связанного оборудования, или подвергать риску травмирования команду судна.
[0084] Аналогично, при операциях возврата ROV 35A использует команды персонала на первом судне 5 для возврата каждого сейсмического сенсорного устройства 30, которое ранее было размещено на морском дне 55. Возвращенные сейсмические сенсорные устройства 30 размещают в отсеке 40 для хранения ROV 35A. В одном варианте осуществления ROV 35A можно последовательно размещать рядом с каждым сейсмическим сенсорным устройством 30 на морском дне 55, и сейсмические сенсорные устройства 30 катят, перемещают на конвейере или передвигают другим способом с морского дна 55 в отсек 40 для хранения. В другом варианте осуществления сейсмические сенсорные устройства 30 можно возвращать с морского дна 55 с помощью роботизированного устройства 60, расположенного на ROV 35A.
[0085] После того как отсек 40 заполнен или содержит заданное число сейсмических сенсорных устройств 30, перегрузочное устройство 100 опускают в положение под поверхностью 10 и состыковывают с ROV 35A. Перегрузочное устройство 100 может быть опущено с помощью крана 25B на выбранную глубину в водяной толще 15, и ROV 35A и перегрузочное устройство 100 состыковывают в подводном положении. После состыковки возвращаемые сейсмические сенсорные устройства 30, содержащиеся в отсеке 40 для хранения, перегружают в перегрузочное устройство 100. После того как отсек 40 освобожден от возвращаемых сенсорных устройств, ROV 35A и перегрузочное устройство 100 рассоединяют, и возвращение сенсорного устройства с помощью ROV 35A можно возобновить. Благодаря этому, перегрузочное устройство 100 может перегружать возвращаемые сейсмические сенсорные устройства 30 в качестве полезной нагрузки на первое судно 5, позволяя средству ROV 35A продолжать сбор сейсмических сенсорных устройств 30 с морского дна 55. Таким образом, время возврата сенсорного устройства значительно уменьшается, поскольку ROV 35A не поднимают и не опускают для разгрузки сенсорного устройства. Кроме того, механические напряжения, прилагаемые к оборудованию, связанному с ROV 35A, сводятся к минимуму, поскольку ROV 35A может находиться под водой в течение длительных периодов.
[0086] В данном варианте осуществления первое судно 5 может перемещаться в первом направлении 75, например, в направлении +X, которое может представлять собой компасный курс или другое линейное или заданное направление. Первое направление 75 может также учитывать и/или включать в себя дрейф, вызванный действием волн, скоростью и направлением течения (течений) и/или ветра. В одном варианте осуществления ряд сейсмических сенсорных устройств 30 размещают на морском дне 55 в выбранных местоположениях, например, в виде множества рядов Rn в направлении X (показаны R1 и R2) и/или столбцов Cn в направлении Y (показаны C1-C3), где n равно целому числу. В одном варианте осуществления ряды Rn и столбцы Cn образуют сеть или матрицу, причем каждый ряд Rn содержит приемную линию по ширине матрицы датчиков (направление X) и/или каждый столбец Cn содержит приемную линию по длине матрицы датчиков (направление Y). Расстояние между соседними сенсорными устройствами 30 в рядах показано, как расстояние LR, а расстояние между соседними сенсорными устройствами 30 в столбцах показано, как расстояние LC. Хотя показана по существу квадратная схема, на морском дне 55 могут быть сформированы другие схемы. Другие схемы включают в себя нелинейные приемные линии и/или не квадратные схемы. Схема (схемы) могут быть заранее заданными или вытекать из других факторов, таких как топография морского дна 55. В одном варианте осуществления расстояния LR и LC могут быть по существу равными и могут включать в себя расстояние примерно между 60 метров до 400 метров, или больше. Расстояние между соседними сейсмическими сенсорными устройствами 30 может быть заранее заданным и/или может вытекать из топографии морского дна 55, как описано выше.
[0087] Первое судно 5 работает на скорости, такой как допустимая или безопасная скорость для работы первого судна 5 и какого-либо оборудования, буксируемого первым судном 5. Скорость может учитывать любые погодные условия, такие как скорость ветра и действие волн, а также течения в водяной толще 15. Скорость судна можно также определять с помощью какого-либо рабочего оборудования, подвешенного, прикрепленного или буксируемого иным способом первым судном 5. Например, скорость обычно ограничена коэффициентами сопротивления компонентов ROV 35A, таких как TMS 50A и шланг 44A жизнеобеспечения, а также какими-либо погодными условиями и/или течениями в водяной толще 15. Поскольку компоненты ROV 35A подвержены сопротивлению, которое зависит от глубины компонентов в водяной толще 15, скорость первого судна может находиться в диапазоне менее чем 1 узел (1,87 км/ч). В данном варианте осуществления, в котором укладываются две приемные линии (ряды R1 и R2), первое судно включает первую скорость примерно между 0,2 узла и примерно 0,6 узла (0,374 и 1,122 км/ч). В других вариантах осуществления первая скорость включает в себя среднюю скорость примерно между 0,25 узла (0,4675 км/ч), которая включает в себя промежуточные скорости менее чем 0,25 узла и скорости, больше чем 1 узел, в зависимости от погодных условий, таких как действие волн, скорости ветра и/или течение в водяной толще 15.
[0088] В ходе сейсморазведки может быть развернута одна приемная линия, такая как ряд R1. Когда одна приемная линия выполнена, второе судно 80 используют для создания сигнала источника. Второе судно 80 снабжено устройством-источником 85, которое может представлять собой устройство, способное создавать звуковые сигналы или вибрационные сигналы, пригодные для получения данных разведки. Сигнал источника распространяется к морскому дну 55, и часть сигнала отражается обратно в сейсмические сенсорные устройства 30. Второму судну 80, возможно, потребуется выполнить многократные проходы, например, по меньшей мере четыре прохода, на одну приемную линию (в данном примере, ряд R1). В то время как второе судно 80 выполняет проходы, первое судно 5 продолжает развертывание второй приемной линии. Однако время, затраченное на выполнение проходов вторым судном 80, намного меньше, чем время развертывания второй приемной линии. Это вызывает время задержки в сейсморазведке, поскольку второе судно 80 простаивает, пока первое судно 5 выполняет вторую приемную линию.
[0089] В данном варианте осуществления первое судно 5 использует одно ROV 35A для укладки сенсорных устройств, чтобы образовывать первый набор из двух приемных линий (ряды R1 и R2) в любом числе столбцов, что может давать длину каждой приемной линии вплоть до (и включительно) нескольких миль. В одном варианте осуществления две приемные линии (ряды R1 и R2) являются по сути параллельными. Когда один направленный проход первого судна 5 выполнен, и первый набор (ряды R1, R2) сейсмических сенсорных устройств 30 уложен на заданную длину, второе судно 80, снабженное устройством-источником 85, используют для создания сигнала источника. Второму судну 80, как правило, необходимо выполнить восемь или больше проходов вдоль двух приемных линий для выполнения сейсморазведки двух рядов R1 и R2.
[0090] Пока второе судно 80 выполняет съемку вдоль двух рядов R1 и R2, первое судно 5 может развернуться на 180 градусов и перемещаться в направлении -X, чтобы уложить сейсмические сенсорные устройства 30 в другие два ряда рядом с рядами R1 и R2, благодаря этому, образуя второй набор из двух приемных линий. Второе судно 80 может затем выполнять другую серию проходов вдоль второго набора приемных линий, тогда как первое судно 5 разворачивается на 180 градусов для перемещения в направлении +X, чтобы укладывать другой набор приемных линий. Процесс может повторяться, пока не будет разведана заданная площадь морского дна 55. Таким образом, время простоя второго судно 80 сведено к минимуму, так как время развертывания для укладки прямых линий урезано примерно наполовину благодаря развертыванию двух рядов за один проход судна 5.
[0091] Хотя показаны только два ряда R1 и R2, укладка сенсорного устройства 30 не ограничена данной конфигурацией, поскольку ROV 35A может быть приспособлено для укладки более чем двух рядов сенсорных устройств за одну направленную буксировку. Например, ROV 35A можно управлять для укладки между тремя и шестью рядами сенсорных устройств 30, или даже большего числа рядов за одну направленную буксировку. Ширина «однопроходного» прогона первого судна 5 для укладки ширины матрицы датчиков, как правило, ограничена длиной привязного троса 46A и/или промежутком (расстоянием LR) между сенсорными устройствами 30.
[0092] Как показано на фиг. 2, оптическая система связи, которая передает данные через водную среду, включает в себя первый оптический приемопередатчик 10 и второй оптический приемопередатчик 20. Каждый оптический приемопередатчик включает в себя оптический передатчик 100 и оптический приемник 200. Как показано, оптический передатчик 100 и оптический приемник 200 приемопередатчика 10 упакованы вместе в корпус 300 для обеспечения двусторонней передачи данных с помощью аналогично упакованного оптического приемопередатчика 20.
[0093] Каждый из приемопередатчиков может быть смонтирован на любой подходящей платформе, включая подводное транспортное средство (например, подводное оборудование, подводная лодка, дистанционно управляемое транспортное средство или автономно управляемое транспортное средство), подводное устройство (например, океанский донный сейсмический узел, такой как типы, поставляемые FairfieldNodal, Inc. of Sugarland, TX), подводную конструкцию (например, нефтяная бурильная или насосная платформа) или любой другой подходящий объект.
[0094] Передатчик и приемник, упакованные вместе, называют приемопередатчиком. Хотя показанные варианты осуществления сосредоточены на пакетах приемопередатчиков, следует иметь в виду, что в различных вариантах осуществления передатчик и приемник могут быть упакованы отдельно. В некоторых вариантах осуществления один передатчик в одном приемнике может быть использован для односторонней связи.
[0095] Как показано на фиг. 2, одновременная двусторонняя передача данных может быть выполнена за счет использования спектрально разделенных длин волн, так что передатчик 1 приемопередатчика 10 может передавать длину волны 1 (например, синюю длину волны или полосу длин волн, таких, которые может испускать светоизлучающий диод InGaN), а передатчик 2 приемопередатчика 20 передает длину волны 2, например, сине-зеленую или зеленую длину волны или полосу длин волн). Приемник 2 приемопередатчика 20 может принимать длину волны 1 передатчика 1 и отклонять длину волны 2 передатчика 2, и все или как можно больше длин волн за пределами диапазона длины волны 1 с использованием оптических фильтров. Также можно использовать другие схемы передачи данных. Например, вместо разделения восходящих и нисходящих сигналов по длине волны, они могут передаваться с использованием временного мультиплексирования или поляризации. Аналогично, может быть использована мультиплексная передача с кодовым разделением и другие схемы передачи данных.
[0096] Различные варианты осуществления включают в себя возможность объединения методов дискриминации пропускания с несколькими несущими, таких как мультиплексирование с ортогональным частотным разделением (OFDM) на оптической основе. Многие близко расположенные поднесущие используют для увеличения полной скорости передачи. Оптические данные могут также передаваться с использованием когерентного OFDM, CO-OFDM, протоколов с использованием схем передачи с одной несущей или с несколькими несущими. В некоторых вариантах осуществления дискриминация или методы дискриминации могут называться оптическими методами дискриминации.
[0097] Аналогично, приемник приемопередатчика 1 может быть выполнен с возможностью приема длины волны 2 передатчика 2 и отклонения длины волны приемопередатчика 1, и всех или как можно больше длин волн за пределами полосы длин волн 2.
[0098] Другой вариант осуществления, показанный на фиг. 3, предназначен для двусторонней передачи с помощью пространственного разделения соответствующих передатчиков и приемников. Здесь передатчик 1 приемопередатчика 1 согласован (например, точно согласован) с приемником 2 приемопередатчика 2, а передатчик 2 приемопередатчика 2 согласован (например, точно согласован) с приемником 2 приемопередатчика 2, так чтобы не допускать вхождения в приемник 1 света, излучаемого передатчиком 1, но рассеянного промежуточной водной средой, и аналогично, делать невозможным вхождение в приемник 2 света от передатчика 2, но рассеянного промежуточной водной средой. В некоторых вариантах осуществления оптические приемопередатчики 10 и 20 могут включать в себя один или больше фильтров, выполненных с возможностью препятствования, ограничения, блокирования, или иначе фильтрования света, поступающего из одного или больше направлений (например, для ограничения внеосевой видимости). В примере, не имеющем ограничительного характера, один или больше фильтров могут включать в себя ячеистый фильтр или направлено селективную оптическую пластину. Например, чтобы дискриминировать нежелательные источники фотонов, может использоваться сортирующее по направлению устройство, такое как светорегулирующая пленка, жалюзи или элемент типа шторки, или нечто подобное.
[0099] Различные варианты осуществления могут включать в себя один или больше механизмов, чтобы направлять выходящий свет из передатчика в направлении приемника и/или принуждать поле обзора приемника отслеживать выход передатчика. В дополнение к механическому сканированию передатчика и приемника для изменения линии визирования также могут использоваться электронные системы. Электронная система, обладающая возможностью сканирования направления передатчика, может приспосабливать множество отдельных источников света (например, светоизлучающих диодов или лазеров), или множество матриц источников света, ориентированных в разных направлениях, так чтобы ориентацию устройства или матрицы в интересующем направлении можно было использовать для передачи данных, как показано на фиг. 2. Таким образом, потребление энергии приемопередатчиком может быть значительно уменьшено по сравнению с системой, которая передает энергию в большее угловое поле обзора.
[0100] Например, на фиг. 4 показан электронный механизм для сканирования поля обзора с использованием многоанодного фотоэлектронного умножителя 410, в котором отдельные, производящие усиление динодные матрицы и аноды выполнены в виде одно- или двумерного устройства, так что свет, попадающий в пространственное местоположение на фотокатоде, производит электрический сигнал на аноде, соответствующий пространственному местоположению фотокатода. При размещении многоанодного фотоэлектронного умножителя 410 в фокусе линзы 215 угловое положение пучка удаленного передатчика преобразуется в пространственное местоположение на фотокатоде. Этот приемник может выполнять двойное назначение, определение местоположения удаленного передатчика для управления, и путем выбора только анода, соответствующего местоположению фотокатода, в котором определяется сигнал передатчика, может быть получено конкретное поле обзора, как на фиг. 2, тем самым отклоняя мешающие источники света.
[0101] Компоненты примера оптического передатчика теперь описываются с ссылками на фиг. 5. Передатчик 100 содержит ряд электронных компонентов, используемых для преобразования входящего сигнала данных в выходящий оптический сигнал, который можно передавать через водную среду. Сигнал данных проводится в модуль 110 преобразования данных, который преобразует входные данные для передачи через неоптическую область, как правило, передается с использованием либо проводящего кабеля, либо оптоволоконного кабеля, в амплитудно-манипулированном формате, таком как кодирование 8 бит/10 бит или фазово-импульсная дискриминация, в зависимости от того, что подходит для использования передатчиком. Этот модуль, как правило, также может обеспечивать функции установления того, что на стороне кабеля имеется информационное соединение, и, в свою очередь, обеспечивает формат передачи сигналов, который передатчик может передавать к удаленному приемнику, чтобы предупредить удаленный приемопередатчик о его наличии. Выходной сигнал модуля 110 преобразования данных передается в модуль 120 управления передатчика, который принимает выходной сигнал модуля 110 преобразования данных и, используя усилители и другие электронные компоненты, преобразует выходной сигнал модуля 110 преобразования данных в управляющий сигнал для источника 130 света, либо по отдельности, либо в совокупности (например, матрица), так что оптический выходной сигнал источника 130 света изменяется между состоянием малой оптической мощности (например, при малом оптическом выходном сигнале или при его отсутствии) и состоянием большой оптической мощности.
[0102] Электронные схемы модуля 120 управления передатчика могут быть выполнены таким образом, чтобы поддерживать как можно большую точность передачи между временными характеристиками (длительность, время нарастания и время спада импульса) колебательного электронного выходного сигнала модуля 110 преобразования данных и колебательного оптического выходного сигнала источника 130 света. Это может потребовать сочетания электронной обратной связи в схеме усилителя, температурной компенсации для корректировки вызванных температурой изменений в оптическом выходном сигнале источника 130 света для данного электрического тока, передаваемого от модуля 120 управления передатчика, или оптической обратной связи от источника 130 света в схемы, связанные с модулем 120 управления передатчика, так чтобы форма оптического сигнала проявляла максимальную точность относительно колебательного входного электрического сигнала.
[0103] Как указано выше, источник света может быть, например, светодиодным источником или лазерным источником, таким как светоизлучающий диод на основе InGaN или твердотельный лазер, управляемый током, такой как лазер InGaN. Выбор того, будет ли использоваться светоизлучающий диод или лазер, во многом будет зависеть от необходимой полосы пропускания данных. В некоторых вариантах осуществления, возможно, бывает трудно достичь полосы пропускания данных больше, чем 10 или 20 Мбит/с, при использовании светоизлучающих диодов, вследствие влияния срока службы носителей в PN-переходе, ведущего к долговременному затуханию оптического выходного сигнала.
[0104] В отличие от них, лазерные источники могут работать при значительно меньшей временной длительности импульса. В некоторых вариантах осуществления это происходит вследствие того, что, когда управляющий ток к лазеру падает ниже порогового уровня, лазерная генерация прекращается, и интенсивность выходного сигнала лазера быстро уменьшается. Аналогично, при увеличении управляющего тока сверх порога лазерной генерации интенсивность выходного сигнала лазера может быстро увеличиваться. Соответственно, модулированный выходной сигнал лазера может воспроизводить даже быстро модулируемой управляющий сигнал с весьма высокой точностью. Соответственно, в некоторых вариантах осуществления может быть обеспечена скорость передачи данных больше чем 10 Мбит/с, 50 Мбит/с, 75 Мбит/с, 100 Мбит/с, 200 Мбит/с, 300 Мбит/с, 400 Мбит/с, 500 Мбит/с, 600 Мбит/с, 1000 Мбит/с или больше.
[0105] Оптический выходной сигнал источника света может быть модифицирован по угловому фактору путем использования оптического элемента 140. Оптический элемент 140 может представлять собой, например, прозрачную эпоксидную линзу, выполненную как одно целое со светоизлучающим диодом или лазерным диодом в промышленном стандартном пакете, или, особенно в случае лазера вместо светоизлучающего диода, данный внешний элемент может быть линзой или другим преломляющим, отражающим или дифракционным элементом, по необходимости, для формирования пучка передатчика в необходимом угловом поле обзора.
[0106] Источник 170 энергии предусмотрен для регулирования входной мощности от платформы, содержащей передатчик 100, и создает необходимые напряжения и токи для питания различных электронных модулей передатчика 100. Данный источник 170 энергии может, как правило, быть высокоэффективным импульсным источником питания с низким уровнем помех, с одним или больше выходов.
[0107] Приемник 200 оптического приемопередатчика должен, как правило, содержать оптический элемент 210, который улавливает поступающий свет и направляет его в светочувствительную область оптического детектора 230. Оптический элемент 210 может представлять собой сферическую или асферическую линзу, или другой отражающий, преломляющий или дифракционный оптический элемент (или группировку элементов), выбранный таким образом, чтобы соответствовать необходимому угловому полю и приемной зоне фоточувствительной области детектора. В одном варианте осуществления может быть добавлена полевая линза 215 после оптического элемента 210, чтобы освещать поверхность оптического детектора 230 более равномерно.
[0108] Оптический фильтр 220 (или любые другие подходящие спектрально избирательные элементы) должен либо предшествовать оптическому элементу 210 (располагаться на стороне в направлении удаленного передатчика 100), либо следовать за оптическим элементом 210, но предшествовать оптическому детектору 230. Назначение оптического фильтра заключается в том, чтобы как можно полнее передавать только оптическую длину волны или длины волн, соответствующие тем, которые излучает удаленный передатчик 100, и чтобы как можно полнее отклонять длину волны или длины волн, испускаемые соседним передатчиком, а также солнечный свет окружающей среды и другой посторонний свет. Оптический фильтр 220 может включать в себя, например, цветовой (поглощающий) стеклянный фильтр, цветовой (поглощающий) пластмассовый фильтр или интерференционный (отражающий) фильтр или дифракционный элемент с разделением по длине волны, по необходимости, в соответствии с требуемой оптической полосой пропускания, отклонения и углового восприятия. В некоторых вариантах осуществления оптический фильтр 220 может включать в себя специальный фильтр, общий фильтр, созданный по заказу фильтр или другой тип фильтра, выполненный с возможностью способствовать отклонению оптической полосы пропускания).
[0109] Оптический детектор 230 преобразует свет, улавливаемый оптическим элементом 210, и пропускаемый оптическим фильтром 220, в электрический сигнал для дальнейшей обработки. За оптическим детектором следует модуль 240 усилителя. В одном варианте осуществления оптический детектор 230 может быть полупроводниковым детектором, таким как кремниевый PIN-фотодиод. В данном варианте осуществления модуль 240 усилителя содержит предварительный усилитель и усилитель с автоматическим управлением коэффициента усиления для усиления электрического выходного сигнала фотодиода с тем, чтобы он соответствовал электрическому выходному сигналу для электронных каскадов. Источник 235 энергии подает низкое напряжение смещения к PIN-фотодиоду, чтобы уменьшить шунтирующую емкость и улучшить временной отклик.
[0110] В некоторых вариантах осуществления, например, как показано на фиг. 6, при использовании лавинного фотодиода в качестве оптического детектора 230, источник 235 энергии будет иметь более высокое напряжение для приведения фотодиода в лавинный режим и обеспечения электронного усиления. В данном варианте осуществления источник 235 энергии, как правило, будет иметь датчик температуры (такой как термистор) для контроля температуры лавинного фотодиода и автоматического регулирования выходного напряжения с тем, чтобы компенсировать температурную зависимость в напряжении лавинного пробоя лавинного фотодиода. В данном варианте осуществления модуль 240 усилителя может также подавать малую часть усиленного электрического сигнала в модуль 250 для автоматического управления коэффициентом усиления, который интегрирует этот электрический сигнал, регулирует его и подает его на вход с управлением напряжения источника 235 энергии, что обеспечивает управление напряжением источника 235 энергии и, таким образом, усиление лавинного фотодиода с тем, чтобы соответствовать изменяющимся уровням света, поступающего на оптический детектор 230, вследствие принятого света передатчика или другого определенного света.
[0111] Модуль для автоматического управления коэффициентом усиления может самостоятельно, например в собственных внутренних схемах, включать в себя переменное усиление, чтобы поддерживать выходной сигнал в требуемом диапазоне для последующей обработки (например, в модуле 260 дискриминации).
[0112] В варианте осуществления с использованием фотоэлектронного умножителя в качестве оптического детектора 230 источник 235 энергии подает высокое напряжение (как правило, 100-500 В) к фотоэлектронному умножителю, чтобы обеспечить быстрый временной отклик и электронное усиление. Обычно источник 235 энергии в данном варианте осуществления будет иметь вход с управлением напряжения, как в варианте осуществления с использованием лавинного фотодиода, так что аналогичный модуль 250 для автоматического управления коэффициентом усиления может управлять напряжением, подаваемым к фотоэлектронному умножителю и, тем самым, его электронным усилением, для соответствия изменяющимся уровням освещенности, получаемым на оптическом детекторе 230, обусловленным полученным светом передатчика или другим определенным светом, а также для защиты фотоэлектронного умножителя от повреждения вследствие высоких уровней освещенности.
[0113] В варианте осуществления, в котором использован фотоэлектронный умножитель с указанной выше скоростью передачи данных, например, 100 Мбит/с, такой как 622 Мбит/с или 1000 Мбит/с, при выборе фотоэлектронного умножителя могут быть учтены особые соображения. Может потребоваться очень высокая пропускная способность электронно-лучевого прибора, и особое внимание может потребоваться при его работе. Например, возможно, будет необходимо использовать только первые несколько каскадов обычного высокоскоростного фотоэлектронного умножителя, использующего ток сигнала от промежуточного каскада динода, а не от анода, чтобы получать достаточно быстрые времена нарастания и падения для поддержания высокой скорости передачи битов. В дополнительном варианте осуществления можно использовать фотоэлектронный умножитель, в котором использована микроканальная пластина в качестве электронной усиливающей среды вместо обычной динодной структуры. В дополнительном варианте осуществления может быть использован гибридный фотодиод, устройство, которое сочетает вакуумный каскад, работающий при высоком напряжении, с последующей внутренней полупроводниковой лавинной структурой, может быть использовано для обеспечения значительной светочувствительной области и электронного усиления, в то же время, поддерживая полосу пропускания, требуемую, например, для операции 1000 Мбит/с. В другом варианте осуществления может быть использован вакуумный фотодиод, который обеспечивает большую площадь улавливания и высокую скорость без внутреннего электронного усиления, при условии, что в последующих электронных усилительных каскадах может быть обеспечено достаточное усиление.
[0114] Выход модуля 240 усилителя передается в модуль 260 дискриминации, который определяет колебательный усиленный сигнал, используя модуль определения формы сигнала, который может включать в себя, например, триггеры Шмидта, часы и другие схемы для преобразования определенной формы сигнала в сигнал, который может быть передан в модуль 270 преобразования данных, преобразующий формат данных, созданный модулем 260 дискриминации из определенной формы оптического сигнала в неоптический формат, пригодный для внешнего приемника данных, расположенного на главной платформе.
[0115] Источник 280 энергии предусмотрен для регулирования входной мощности с платформы, содержащей передатчик 100, и создает необходимые напряжения и токи для питания различных электронных модулей приемника 200. Данный источник 280 энергии может, как правило, быть высокоэффективным импульсным источником питания с низким уровнем помех, с одним или больше выходов.
[0116] В случае редкого обмена данными может быть предусмотрен модуль 290 для управления мощностью, который использует оптический детектор и маломощную схему с усилителем, электронным фильтром, пороговой схемой и реле или электронным переключателем для определения приближения удаленного передатчика и включения локального передатчика и приемника путем подключения входной мощности между источником 170/280 питания и источником питания на платформе.
[0117] В варианте осуществления, показанном на фиг. 2, передатчик 100 и приемник 200 должны быть расположены в сосуде 300 под давлением, чтобы изолировать передатчик 100 и приемник 200 от контакта с водной средой. В данном варианте осуществления должны быть выполнены окна 310 для передачи света из передатчика 100 в водную среду и к удаленно смонтированному приемнику, и от удаленно смонтированного передатчика через водную среду к приемнику 200. Это, как правило, могут быть отдельные окна для передатчика и приемника, но может также быть единственное окно, служащее как для передатчика, так и для приемника.
[0118] В варианте осуществления, в котором направление пучка передатчика и/или поле обзора приемника должно перемещаться во время работы (например, для связи между перемещающимся и неподвижным приемопередатчиком) выполнен элемент, который определяет направление удаленного передатчика и генерирует управляющие сигналы для кардана или другого механического устройства, преобразующего угол наведения передатчика или приемника, или для электронного преобразователя углов наведения. На фиг. 6 показан один вариант осуществления, подходящий для случая, когда угловыми направлениями необходимо управлять только в одном измерении, в котором ориентирована матрица оптических детекторов 410 под различными углами, чтобы определять входящий пучок передатчика. Оптические детекторы снабжены оптическими фильтрами 415 (или другими избирательными элементами формы сигнала) для передачи света от удаленного передатчика и отклонения отраженного света от локального передатчика. Оптические детекторы также могут быть снабжены линзами 420 или другим оптическим элементом, способным определять поле обзора оптического детектора. Электрический сигнал от оптических детекторов 410 передается в модуль 440 усилителя. Модуль 440 усилителя, как правило, включает в себя автоматическое управления коэффициентом усиления, чтобы поддерживать выходной сигнал в диапазоне уровней напряжения, пригодном для использования следующими каскадами. Электрический выходной сигнал из оптических детекторов передается в направляющий процессорный модуль 460, который измеряет уровень сигнала от каждого оптического детектора и рассчитывает направление удаленного передатчика. Расчет может быть выполнен для грубого направления, учитывая отношения интенсивностей оптических сигналов, используя либо систему операционных усилителей, либо используя фактическое аналого-цифровое преобразование и выполнение расчетов в микропроцессорной системе. Более точный расчет направления удаленного передатчика может быть выполнен в микропроцессоре с учетом геометрии детекторов и количества света удаленного передатчика, которое будет перехвачено ими в зависимости от угла.
[0119] В другом варианте осуществления, показанном на фиг. 8, используют позиционно-чувствительный оптический детектор 520, например, позиционно-чувствительный полупроводниковый фотодиод (например, сегментированный фотодиод), позиционно-чувствительный (например, с резистивным анодом) фотоэлектронный умножитель или многоанодный фотоэлектронный умножитель со схемой делителя напряжения для обеспечения определения углового местоположения удаленного передатчика. Формирующий изображение оптический элемент 410, например, линза, используется для преобразования угла поступающего света передатчика в положение на активной площади позиционно-чувствительного оптического детектора 520. Оптический фильтр 415 может быть использован для передачи света от удаленного передатчика и отклонения внешнего фонового света и отраженного света от локального передатчика. Электрический выходной сигнал позиционно-чувствительного детектора 520 передается в модуль 440 усилителя, и выходной сигнал модуля 440 усилителя передается в направляющий процессорный модуль 460 для генерации направляющих сигналов. Направляющие сигналы, генерируемые согласно настоящему варианту осуществления, являются достаточно точными для точного направления платформы, при необходимости.
[0120] В дополнение к спектрально селективному оптическому фильтру 415, чтобы отклонять фоновый свет (такой как солнечный свет, если передатчики расположены неглубоко) может быть включен электронный фильтр либо в модуль 440 усилителя, или в направляющий процессорный модуль 460, чтобы отклонять постоянные или медленно изменяющиеся (немодулированные) оптические сигналы и принимать модулированный сигнал от удаленного передатчика.
[0121] Выходной сигнал направляющего процессорного модуля 460 передается в модуль 470 привода, который создает электрические сигналы к кардану 480 приводом от двигателя (или другому позиционирующему устройству), на котором смонтированы передатчик и приемник, так что электрический сигнал от модуля 470 привода преобразует угол передатчика и приемника относительно корпуса. Предусмотрен источник 490 питания для регулирования мощности от платформы и обеспечения необходимых напряжений и токов для соответствующих модулей.
[0122] В другом варианте осуществления, показанном на фиг. 9, используют выходной сигнал направляющего процессорного модуля 460 для выбора разведенных под углом источников света передатчика или матриц 610 источников света таким образом, чтобы проецировать пучок передатчика в нужном направлении. В другом варианте осуществления используют выходной сигнал направляющего процессора для переключения выхода многоанодного фотоэлектронного умножителя, используемого в качестве оптического детектора, так чтобы выбирать направление, для которого будет определяться входящий пучок света.
[0123] В некоторых вариантах осуществления в описанных здесь приемопередатчиках можно использовать методы канального кодирования для увеличения надежности связи и скорости передачи данных. Например, можно использовать коды передачи малой плотности с контролем по четности (low-density parity-check, LDPC) и адаптивные канальные коды скоростей.
[0124] В некоторых вариантах осуществления в описанных здесь приемопередатчиках можно реализовать динамическую оптимизацию параметров передачи. В подводной среде, такой как при сейсморазведке, местные водные условия могут существенно отличаться. Чтобы приспособиться к изменениям, оптические линии связи динамически подстраиваются к механизмам измерения потерь в линии связи, по отдельности или в сочетании с другими эффектами, такими как дисперсия, и назначается оптимальная скорость передачи данных. Кроме того, если условия подводные среды позволяют, могут быть введены режимы передачи с несколькими несущими. Местная цифровая обработка сигнала (Digital Signal Processing, DSP) может быть выполнена для корректировки или компенсации применимых параметров передачи-приема, или для корректировки управления связью может применяться программное обеспечение. Чтобы поддерживать выполнение связи, соединение оптического накопителя передачи можно контролировать непрерывно.
[0125] В некоторых вариантах осуществления для передачи сейсмических данных могут использоваться приемники другого типа, например, из автономного подводного сейсмического узла к поисковому устройству. Поисковое устройство может быть смонтировано, например, на подводном судне, дистанционно управляемом транспортном средстве или автономно управляемом транспортном средстве. В некоторых вариантах осуществления передача сейсмических данных может выполняться со скоростью по меньшей мере 10 Мбит/с, 100 Мбит/с, 500 Мбит/с, 1000 Мбит/с или больше. В некоторых вариантах осуществления канал связи поддерживается в течение по меньшей мере 1 секунды, 10 секунд, 1 минуты, 5 минут, 10 минут, 20 минут, 30 минут, 40 минут, 50 минут, 1 часа или больше. В некоторых вариантах осуществления передача происходит на расстояние по меньшей мере 10 см, 100 см, 1 м, 2 м, 3 м, 5 м, 10 м, 20 м, 100 м больше.
[0126] Хотя во многих вариантах осуществления (например, описанных здесь) выгодно использовать длины волн в диапазоне 400-600 нм (или в любом его поддиапазоне), в других случаях, зависимости от наличного применения, можно использовать любые другие подходящие длины волн (например, длины волн в диапазоне от 300 нм до 1400 нм).
[0127] На фиг. 10 приведена иллюстративная система 1000 для выполнения сейсморазведки в водной среде с использованием оптической передачи. В некоторых вариантах осуществления система 1000 включает в себя первую оптическую линию 1001 связи, которая передает и принимает оптические сигналы к/от или между второй оптической линией 1003 связи. В некоторых вариантах осуществления первая оптическая линия 1001 связи и вторая оптическая линия 1003 связи могут включать в себя один или больше одинаковых компонентов. Один или больше одинаковых компонентов могут быть выполнены комплементарными, так что компонент передачи первой оптической линии 1001 связи подстраивается для передачи оптических сигналов к приемному компоненту второй оптической линии 1003 связи.
[0128] В некоторых вариантах осуществления первая оптическая линия 1001 связи включает в себя магнитный модуль 1002, выполненный с возможностью разделения напряжений в подключении к сети Ethernet. Магнитный модуль 1002 может разделять напряжение таким образом, что оборудование, работающее от различных источников напряжения, может сосуществовать в одной сети. В некоторых вариантах осуществления, если один или больше компонентов системы 1000 или другие компоненты сети питаются от одного источника энергии, может быть необязательно включать магнитный модуль 1002. В некоторых вариантах осуществления магнитный модуль 1002 включает в себя один или больше трансформаторов, с возможностью блокирования постоянного тока и низкочастотных напряжений. В некоторых вариантах осуществления магнитный модуль 1002 представляет собой аппаратный модуль, который является внешним по отношению к печатной плате (PCB), и не является частью матрицы логических элементов с эксплуатационным программированием (FPGA). В некоторых вариантах осуществления магнитный модуль 1002 может быть внутренним относительно FPGA, или иначе связанным с возможностью передачи данных с FPGA, для способствования системам и способам выполнения сейсморазведки с использованием оптической передачи.
[0129] В некоторых вариантах осуществления система 1000 включает в себя модуль физического уровня или модуль 1004 «физического слоя». Модуль 1004 физического уровня может относиться к нижнему слою (например, или самому нижнему слою) в модели взаимодействия открытых систем сети. Модуль 1004 физического уровня выполнен с возможностью передачи и приема сигналов на основании одного или больше технических условий, таких как Ethernet, WiFi, WiMax, Bluetooth, коммуникация ближнего поля и др. В некоторых вариантах осуществления модуль физического уровня включает в себя одну или больше микросхем на одной или больше монтажных плат, которые являются внешними относительно FPGA. В некоторых вариантах осуществления модуль 1004 физического уровня может быть внутренним относительно FPGA, или иначе связанным с возможностью передачи данных с FPGA, для способствования системам и способам выполнения сейсморазведки с использованием оптической передачи.
[0130] В некоторых вариантах осуществления система 1000 включает в себя FPGA 1006 (например, матрицу логических элементов с эксплуатационным программированием, имеющую одну или больше интегральных схем, которая может быть конфигурирована для способствования сейсмической разведке в водной среде). В некоторых вариантах осуществления FPGA 1006 может включать в себя один или больше контроллеров доступа к среде (Media Access Controller, MAC) (например, первый MAC 1008 и второй MAC 1010). Первый и второй MAC 1008 и 1010 могут представлять второй слой модели взаимодействия открытых систем. Первый и второй MAC 1008 и 1010 могут быть выполнены с возможностью выполнения одной или больше следующих функций: прием/передача кадров, функции ретрансляции и возврата, форсирование межкадрового интервала и отбрасывание искаженных кадров. В некоторых вариантах осуществления первый MAC 1008 (или MAC на палубе) может передавать и принимать данные через соединение Ethernet (например модуль 1004 физического уровня и магнитные модули 1002), а второй MAC 1010 (или донный MAC) может передавать и принимать данные через оптическое соединение.
[0131] В некоторых вариантах осуществления FPGA 1006 включает в себя микропроцессор 1012. Микропроцессор 1012 может быть связан с возможностью передачи данных с первым и вторым MAC 1008 и 1010, соответственно. Микропроцессор 1012 может быть выполнен с возможностью получения кадров данных от главного устройства и накопителя кадров данных, пока система не будет готова для кадров данных. Микропроцессор 1012 может включать в себя или иметь доступ к памяти, выполненной с возможностью хранения полученных кадров данных. Объем памяти может быть достаточным для хранения сравнительно большого объема данных, достаточного для способствования системам и способам выполнения сейсморазведки с использованием оптической линии связи. В некоторых вариантах осуществления микропроцессор 1012, кроме того, выполнен с возможностью отправки данных к второму MAC 1010, когда модуль 1016 статуса линии связи и управления определяет, что оба приемника принимают достоверные данные.
[0132] В некоторых вариантах осуществления FPGA 1006 включает в себя буфер 1014, который доступен для микропроцессора 1012. Буфер 1014 может включать в себя память, которая используется микропроцессором 1012 для хранения кадров данных, пока второй MAC 1010 не будет готов для передачи кадров данных.
[0133] В некоторых вариантах осуществления FPGA 1006 включает в себя модуль 1018 синхронизация принятых данных. Модуль 1018 синхронизации принятых данных может строить кадры данных из данных, принятых от декодера 1020 (например, декодера 8 бит/10 бит), а также обеспечивать синхронизацию информации для блока 1016 статуса линии связи и управления. Кадры строятся по полученным данным, пока не будет определен межкадровый интервал. Когда определен межкадровый интервал, кадр отправляется во второй MAC 1010 (например, со скоростью 1Гбит/с). Межкадровый интервал может включать в себя специальные управляющие символы, передаваемые второй оптической линией 1003 связи и декодируемые детектором 1020. Данные управляющие символы могут включать в себя информацию об уровне оптического сигнала, сообщаемую второй оптической линией 1003 связи. В некоторых вариантах осуществления данные синхронизации, сообщаемые блоку 1016 статуса линии связи и управления, могут указывать, например, что: (1) приемник в настоящее время не синхронизирован с входным потоком данных или поток данных отсутствует,(2) приемник синхронизирован с входным потоком данных, но информация в потоке данных в виде управляющих символов указывает, что приемник другой стороны не синхронизирован с нашим передатчиком,или (3) приемник синхронизирован с входным потоком данных, и информация в этом потоке данных в виде управляющих символов указывает, что приемник другой стороны также синхронизирован с нашим передатчиком.
[0134] В некоторых вариантах осуществления оптическая линия 1001 связи или FPGA 1006 может включать в себя декодер 1020, например, декодер 8 бит/10 бит. Декодер 1020 может принимать данные от последовательно-параллельного преобразователя 1022 и преобразовать данные в 8-битные символы данных 8-битных управляющих символов с использованием схемы кодирования 8 бит/10 бит. Декодер 1020 может синхронизироваться к потоку данных после команды, использующей управляющие символы в потоке данных. В некоторых вариантах осуществления декодер 1020 может быть выполнен с возможностью декодирования данных с использованием других методов декодирования, которые облегчают выполнение сейсморазведки с использованием оптической линии связи в водной среде.
[0135] В некоторых вариантах осуществления оптическая линия 1001 связи или FPGA 1006 может включать в себя последовательно-параллельный преобразователь 1022. Последовательно-параллельный преобразователь может принимать последовательный поток данных и вырабатывать данные (например, 10-битные параллельные данные), подходящие для использования декодером 1020. В некоторых вариантах осуществления последовательно-параллельный преобразователь 1022 определяет границы принятых информационных импульсов и настраивает часы, чтобы зафиксировать данные в подходящий точке в колебательном сигнале данных, которая может соответствовать центру глазковой индикации. В некоторых вариантах осуществления, когда синхронизатор 1018 принятых данных отправляет команду синхронизации, последовательно-параллельный преобразователь 1022 может попытаться синхронизироваться с входным потоком данных, используя управляющие символы процесса синхронизации. Процесс синхронизации может быть повторен в соответствии с командой от синхронизатора 1018 принятых данных.
[0136] В некоторых вариантах осуществления оптическая линия 1001 связи включает в себя фотоумножитель (photo multiplier tube, PMT) 1024. PMT 1024 может быть связан с возможностью передачи данных с FPGA 1006, будучи внешним по отношению к FPGA. PMT 1024 может включать в себя связанную схему, которая преобразует падающий или принятый свет в электрические сигналы, пригодные для усиления. В некоторых вариантах осуществления PMT 1024 может включать в себя или может быть связан с возможностью передачи данных с оптическими приемниками 200 по фиг. 2. В некоторых вариантах осуществления PMT 1024 может включать в себя или может быть связан с возможностью передачи данных с многоанодным PMT 410 по фиг. 4.
[0137] В некоторых вариантах осуществления оптическая линия связи включает в себя устройство 1026 для управления коэффициентом усиления. Устройство 1026 для управления коэффициентом усиления может включать в себя схему или другие аппаратные средства, которые регулируют коэффициент усиления PMT таким образом, чтобы можно было получать подходящий электрический сигнал из падающего света. В некоторых вариантах осуществления коэффициент усиления можно отрегулировать на основании анодного тока, измеренного из PMT, и амплитуды колебательного сигнала данных в цепочке сигналов. Коэффициент усиления можно отрегулировать путем увеличения или уменьшения напряжения смещения на электронно-лучевом приборе. Коэффициент усиления, требуемый для получения необходимого сигнала, также отправляется в блок 1016 статуса линии связи и управления. Коэффициент усиления также может быть отправлен в блок 1034 генератора передачи/синхроимпульсов, который может направлять информацию во вторую оптическую линию 1003 связи, используя управляющие символы в межкадровом интервале. Вторая оптическая линия 1003 связи может регулировать мощность передачи на основании этой информации для поддержки надежной связи в широком диапазоне оптических условий.
[0138] Первая и вторая оптические линии 1001 и 1003 связи могут содержать один или больше лазеров 1030 и 1032 (например, оптические передатчики 100 по фиг. 2), соответственно, которые производят амплитудно-модулированный оптический сигнал, содержащий цифровую информацию. Например, лазер 1032 может производить оптический сигнал, содержащий цифровую информацию, полученную от параллельно-последовательного преобразователя 1038. Оптический сигнал можно модулировать путем модуляции тока через лазер 1030 и 1032. Величину тока дискриминации и, следовательно, дискриминацию света, можно регулировать с помощью команд из модуля 1016 статуса линии связи и управления. Например, величину и дискриминацию можно регулировать, чтобы компенсировать оптические условия (например, непрозрачность, мутность, или непрозрачность водной среды).
[0139] В некоторых вариантах осуществления оптическая линия 1001 связи или FPGA 1006 может включать в себя последовательно-параллельный преобразователь 1038. Последовательно-параллельный преобразователь 1038 может принимать данные (например, параллельные данные) от кодирующего устройства 1036 (например, кодирующее устройство 8 бит/10 бит) и отправлять поток данных (например, последовательный поток данных) к лазеру 1032.
[0140] В некоторых вариантах осуществления оптическая линия 1001 связи или FPGA 1006 содержит кодирующее устройство 1036. В некоторых вариантах осуществления кодирующее устройство 1036 может содержать кодирующее устройство 8 бит/10 бит, которое преобразует 8-битный поток данных в сбалансированный по постоянному току 10-битный поток данных. Данные могут быть любыми значениями из 256 возможных 8-битных данных или одним из 16 управляющих символов.
[0141] В некоторых вариантах осуществления первая оптическая линия 1001 связи или FPGA 1006 может включать в себя генератор 1034 синхроимпульсов передачи. Генератор 1034 синхроимпульсов передачи может принимать данные (например, со скоростью передачи данных 1 Гбит/с) от второго MAC 1010. Генератор 1034 синхроимпульсов передачи может буферизировать данные, используя первую из стековой памяти, и отправлять данные со второй скоростью передачи данных (например, 300 Мбит/с) в кодирующее устройство 1036. Генератор 1034 синхроимпульсов передачи может отправлять к микропроцессору 1012 сигнал, указывающий, что генератор 1034 синхронизации передачи готов к приему большего количества данных от второго MAC 1010. Генератор 1034 синхроимпульсов передачи может способствовать синхронизации с помощью второй оптической линии 1003 связи путем отправки данных синхронизации. Генератор 1034 синхроимпульсов передачи может принимать команды от модуля 1016 статуса линии связи и управления, указывающие на отправку данных синхронизации во вторую оптическую линию 1003 связи. В некоторых вариантах осуществления генератор 1034 синхронизации передачи может отправлять во вторую оптическую линию 1003 связи принятую информацию об уровне сигнала в межкадровых интервалах таким образом, что вторая оптическая линия 1003 связи может регулировать свою селекцию посредством лазерного излучения.
[0142] В некоторых вариантах осуществления первая оптическая линия 1001 связи или FPGA 1006 содержит модуль 1016 статуса линии связи и управления, который контролирует статус линии связи, направляет корректировки к мощности передатчика или инициирует синхронизацию. Например, модуль 1016 статуса линии связи и управления может определять, когда передатчик должен отправлять синхронизирующие символы, на основании статуса синхронизации, полученного от второй оптической линии 1003 связи. Если вторая оптическая линия 1003 связи сообщает, что синхронизация отсутствует, или что от другой стороны сигнал не поступал, модуль 1016 статуса линии связи и управления может способствовать отправке синхронизирующих символов. В некоторых вариантах осуществления модуль 1016 статуса линии связи и управления может определять информацию об уровне сигнала, которую передатчик будет направлять на другую сторону на основании необходимого коэффициента усиления PMT. В некоторых вариантах осуществления модуль 1016 статуса линии связи и управления может устанавливать уровень селекции лазерными средствами на основании информации об уровне сигнала, полученного от второй оптической линии 1003 связи. В некоторых вариантах осуществления модуль 1016 статуса линии связи и управления может обеспечивать информацию о статусе линии связи для микропроцессора 1012. Микропроцессор 1012 может затем доставлять информацию о статусе линии связи после запроса к ведущему устройству.
[0143] На фиг. 11 проиллюстрирован вариант осуществления способа 1100 выполнения сейсморазведки в водной среде. Способ 1100 может быть выполнен с помощью одной или больше систем или компонентов, показанных на фиг. 2-10 в среде, показанной на фиг. 11. Например, способ 1100 может быть выполнен с использованием FPGA 1006 по фиг. 10 и приемопередатчиков 10 и 20 по фиг. 2.
[0144] В некоторых вариантах осуществления способ 1100 включает в себя прием данных о подводной среде первым блоком установленного на дне океана сейсмометра (OBS-сейсмографа) (например, сенсорного устройства 30 по фиг. 1), расположенного в водной среде (1105). Данные о подводной водной среде могут включать в себя, например, одни или больше сейсмических данных, данных о подводных существах, данные о мутности, данные о качестве воды, данные о водном течении, данные о непрозрачности воды, данные о температуре воды и др. Блок OBS-сейсмометра может принимать данные о подводной среде, используя один или больше датчиков, расположенных в блоке OBS-сейсмометра или один или больше датчиков, внешних относительно OBS. Один или больше датчиков могут включать в себя, например, геофон, акселерометр, гироскоп, весы и др. В некоторых вариантах осуществления блок OBS-сейсмометра может быть расположен возле или вблизи океанского дна или морского дна. В некоторых вариантах осуществления блок OBS-сейсмометра может находиться в контакте, располагаться на океанском дне, частично погружаться или иначе соединяться с океанским дном. В некоторых вариантах осуществления блок OBS-сейсмометра может быть соединен с морским дном посредством шипа, тогда как в других вариантах осуществления блок OBS-сейсмометра может быть расположен на океанском дне (например, блок OBS-сейсмометра может включать в себя дисковидный контейнер, у которого нижняя поверхность является по существу плоской и выполнена с возможностью достаточного сцепления с грунтом или морским дном, так что геофон, расположенный внутри блока OBS-сейсмометра, может принимать сейсмические данные).
[0145] В некоторых вариантах осуществления данные о подводной окружающей среде включают в себя данные, показывающие по меньшей мере один из элементов: сейсмическая активность, растворенные твердые вещества в водной среде, растворенные минеральные вещества в водной среде, состояние водной среды, концентрация кислорода в водной среде, концентрация соли в водной среде, концентрация планктона в водной среде, мутность водной среды и наличие животных в водной среде. Блок OBS-сейсмометра может содержать (внутри или снаружи) или иметь доступ к одному или больше датчиков, выполненных с возможностью приема, идентификации, определения или получения иным образом данных о подводной среде.
[0146] В некоторых вариантах осуществления способ 1100 включает в себя преобразование данных о подводной среде в оптический сигнал (1110). Оптический сигнал может быть форматирован для оптической передачи в водной среде. Например, модуль преобразования данных блока OBS-сейсмометра может преобразовывать данные о подводной среде, полученные блоком OBS-сейсмометра, в первый формат, имеющий один или больше методов канального кодирования. Методы канального кодирования могут включать в себя, например, амплитудно-манипулированный формат, кодирование 8 бит/10 бит, фазово-импульсную дискриминацию, квадратурную фазовую манипуляцию (Quadrature Phase Shift Keying, QPSK), и квадратурную амплитудную дискриминацию. В некоторых вариантах осуществления первый формат может включать в себя или быть связанным с одним или больше параметров, таких как частота, скорость передачи данных, длина волны, угол, полоса пропускания, интенсивность, плотность фотонов и др. Например, способ 1100 может включать использование одного или больше компонентов системы 1000, таких как микропроцессор 1012, MAC 1010, генератор 1034 передачи/синхроимпульсов, кодирующее устройство 1036 или последовательно-параллельный преобразователь 1038 для преобразования или передачи данных о подводной среде в оптический сигнал.
[0147] В некоторых вариантах осуществления способ 1100 включает в себя передачу оптического сигнала в первом формате через водную среду (1115). Например, оптический передатчик блока OBS-сейсмометра может быть выполнен с возможностью передачи оптического сигнала в первом формате через водную среду. Оптический сигнал может передаваться на основании первого формата, одного или больше параметров или метода канального кодирования. В некоторых вариантах осуществления способ 1100 включает в себя передачу оптического сигнала с использованием источника света или другого оптического передатчика, такого как твердотельный источник света, источник света на основе InGaN, лазера или светоизлучающего диода. В некоторых вариантах осуществления оптический передатчик может быть компонентом передатчика, таким как передатчик 10 или 20, показанный на фиг. 2.
[0148] В некоторых вариантах осуществления способ 1100 включает в себя передачу оптического сигнала с использованием метода дискриминации пропускания с одной несущей. В некоторых вариантах осуществления способ 1100 включает в себя передачу оптического сигнала с использованием метода дискриминации пропускания с несколькими несущими. Например, метод дискриминации пропускания с несколькими несущими может включать в себя методы мультиплексирования. В некоторых вариантах осуществления метод пропускания с несколькими несущими может включать в себя оптический метод мультиплексирования с ортогональным частотным разделением.
[0149] В некоторых вариантах осуществления скорость передачи данных оптического сигнала, передаваемого через водную среду, может колебаться примерно от 10 Мбит/с до 300 Мбит/с. В некоторых вариантах осуществления скорость передачи данных может колебаться примерно от 10 Мбит/с до 1 Гбит/с. В некоторых вариантах осуществления, например, в некоторых типах блоков контроля могут использоваться меньшие скорости передачи данных, до 10 Мбит/с или 100 Мбит/с.
[0150] В некоторых вариантах осуществления способ 1100 включает в себя прием оптического сигнала, передаваемого через водную среду. Например, оптический приемник по меньшей мере одного из группы, дистанционно управляемого транспортного средства (ROV), автономного подводного транспортного средства (AUV), или автономно управляемого транспортного средства (AOV) может принимать оптический сигнал. Способ 1100 может включать в себя прием оптического сигнала через оптические приемники 200 или приемопередатчики 10 или 20, показанные на фиг. 2, или с использованием PMT 1024, показанного на фиг. 10.
[0151] В некоторых вариантах осуществления способ 1100 может включать в себя преобразование оптического сигнала, переданного через водную среду, в неоптический сигнал, имеющий второй формат (1125). В некоторых вариантах осуществления неоптический сигнал может относиться к электрическому сигналу, который может передаваться по проводу или кабелю. В некоторых вариантах осуществления неоптический сигнал включает в себя электрический сигнал, конфигурированный для передачи через оптоволоконный кабель или другой кабель, к морскому судну (например, судну на поверхности океана).
[0152] В некоторых вариантах осуществления второй формат неоптического сигнала или электрического сигнала, передаваемого через водную среду, отличается от первого формата оптического сигнала. Например, второй формат электрического сигнала может включать в себя скорость передачи данных, которая выше, чем скорость передачи данных первого формата оптического сигнала. Данные второго формата могут быть выше, поскольку электрический сигнал или неоптический сигнал передается по кабелю, а не оптически через водную среду.
[0153] В некоторых вариантах осуществления способ 1100 включает в себя множество установок OBS, передающих один или больше оптических сигналов через водную среду. Например, первый блок OBS-сейсмометра может передавать оптический сигнал через водную среду во второй блок OBS-сейсмометра. Второй блок OBS-сейсмометра может принимать оптический сигнал и передавать другой оптический сигнал на третий блок OBS-сейсмометра через водную среду. В некоторых вариантах осуществления одна из установок OBS может передавать оптический сигнал в ROV, подводное транспортное средство (AUV) или AOV или некоторые другие точки доступа через водную среду. ROV, подводное транспортное средство (AUV), AOV или другая точка доступа может затем преобразовывать полученный оптический сигнал в неоптический сигнал, и передавать неоптический сигнал по кабелю или проводу к морскому судну или другому устройству, что облегчает передачу данных к поверхности океана.
[0154] В некоторых вариантах осуществления первый блок OBS-сейсмометра передает первый оптический сигнал на второй блок OBS-сейсмометра, а второй блок OBS-сейсмометра передает данные первого оптического сигнала в дополнение к данным второго блока OBS-сейсмометра в ROV, AUV, AOV или другую точку доступа. Таким образом, множество установок OBS может обобщать данные, переданные посредством оптических сигналов через водную среду, чтобы облегчить передачу данных в ROV или другое устройство, способное передавать данные с помощью неоптического сигнала и провода к поверхности океана.
[0155] В некоторых вариантах осуществления способ 1100 включает в себя определение характеристик водной среды, чтобы корректировать параметры или методы кодирования, связанные с передачей оптического сигнала. Характеристика может содержать по меньшей мере один из элементов: показатель мутности, качество воды, течение воды, и непрозрачность. В некоторых вариантах осуществления способ может включать в себя использование количества света, определенного в приемнике, для измерения количества света в приемнике и, таким образом, различение прозрачности воды (например, мутности) и/или расстояния между передатчиком и приемником. Поскольку фототок на выходе детектора будет примерно равен произведению оптической мощности на фоточувствительном элементе (таком как фотокатод), эффективности преобразования оптической мощности в фотоэлектроны (квантовой эффективности) и коэффициента усиления детектора, такое измерение может быть выполнено путем измерения выходного тока от фотодетектора (PIN-диода, лавинного фотодиода (APD), гибридного фотодетектора (Hybrid Photodetector, HPD), вакуумного фотодиода, фотоумножителя динодного типа или фотоумножителя типа микроканальной пластины (MCP) и др.), а также коэффициента усиления фотодетектора (как проявляемого напряжением (напряжениями) смещения для APD, HPD или фотоумножителя) и коэффициента усиления любого из элементов усилителя.
[0156] В другом варианте осуществления будет использоваться измерение оптической мощности, как описано в предыдущем пункте, для изменения скорости передачи данных, чтобы гарантировать низкий процент ошибок и максимально эффективную скорость передачи данных. В условиях, когда мощность принимаемого сигнала передатчика малая, вследствие мутности, расстояния между передатчиком и приемником, загрязнения или мусора на окне и др., скорость передачи данных может быть уменьшена таким образом, что число фотонов на бит увеличивается, дробовой шум в приемнике уменьшается и, благодаря этому, процент ошибок уменьшается. В некоторых вариантах осуществления выходная интенсивность оптического сигнала может быть увеличена. В некоторых вариантах осуществления длина волны света может быть скорректирована для улучшения скорости передачи данных (например, если определено, что одна или больше длин волны света, наиболее вероятно, поглощается или отражается мусором в водной среде).
[0157] В некоторых вариантах осуществления способ 1100 включает в себя введение оптической линии связи между блоком OBS-сейсмометра и по меньшей мере с одним из средств ROV и AUV. Способ 1100 может включать в себя передачу первого оптического сигнала от блока OBS-сейсмометра по меньшей мере к одному из средств ROV и AUV. ROV или AUV может определять (например, посредством микропроцессора), что частота появления ошибочных битов 1 сигнала является удовлетворительной, это может определять, что частота появления ошибочных битов слишком малая. В некоторых вариантах осуществления ROV или AUV может сравнивать частоту появления ошибочных битов с пороговым значением, заданным администратором системы. В некоторых вариантах осуществления способы могут включать в себя выполнение теста частоты появления ошибочных битов, используя тестовый образец частоты появления ошибочных битов (например, псевдослучайная двоичная последовательность, квазислучайный источник сигнала, 3 в 24, 1:7, мин/макс, все единицы, все нули, чередование нулей и единиц, 2 в 8, пассивное ответвление, мультипат, или T1-DALY и 55 OCTET). В некоторых вариантах осуществления пороговое значение частоты появления ошибочных битов может, например, изменяться примерно от 1e-2 до 1e-8. В некоторых вариантах осуществления пороговое значение частоты появления ошибочных битов может, например, изменяться примерно от 1e-3 до 1e-4.
[0158] В некоторых вариантах осуществления способ 1100 может включать в себя передачу второго оптического сигнала, имеющего вторую скорость передачи данных, которая больше, чем первая скорость передачи данных. Способ 1100 может включать в себя выбор второй скорости передачи данных, которая выше, чем первая скорость передачи данных, в зависимости от определения того, что частота появления ошибочных битов первого сигнала удовлетворяет пороговому значению. Например, если частота появления ошибочных битов первого сигнала сравнительно хорошая (например, 1e-4 или меньше), способ 1100 может включать в себя выбор второй скорости передачи данных, которая выше чем первая скорость передачи данных. В некоторых вариантах осуществления способ 1100 может включать в себя выбор второй скорости передачи данных на основании частоты появления ошибочных битов (например, если частота появления ошибочных битов сравнительно низкая, вторая скорость передачи данных может быть кратной первой частоте появления ошибочных битов, например, удвоенной первой скорости передачи данных).
[0159] В некоторых вариантах осуществления способ 1100 включает в себя определение того, что частота появления ошибочных битов меньше, чем пороговое значение, или наоборот, не удовлетворяет пороговому значению (например, частота появления ошибочных битов слишком высокая). В данном случае способ 1100 может включать в себя выбор второй скорости передачи данных, которая меньше, чем первая скорость передачи данных (например, вторая скорость передачи данных может составлять примерно от 10% до 90% от первой скорости передачи данных).
[0160] В некоторых вариантах осуществления автоматическое управление коэффициентом усиления может использоваться для обеспечения функции затяжного пуска. Автоматическое управление коэффициентом усиления может позволить приемнику работать в оптимальном диапазоне чувствительности, выше диапазона мощностей принимаемого сигнала передатчика. Затяжной пуск может защитить фотодетектор (например, оптический приемник), который имеет потенциалозависимый коэффициент усиления, например, APD, HPD, фотоумножитель динодного типа или фотоумножитель типа MCP. Эти фотодетекторы могут быть повреждены вследствие работы при высоких уровнях освещенности или коэффициентах усиления. Таким образом, автоматическое управление коэффициентом усиления, которое начинается по умолчанию с низкого коэффициента усиления, может предотвратить повреждение фотодетектора. В некоторых вариантах осуществления автоматическое управление коэффициентом усиления с затяжным пуском может быть реализовано в аппаратном обеспечении с использованием схемы синхронизации. В некоторых вариантах осуществления автоматическое управление коэффициентом усиления с затяжным пуском может быть реализовано в программном обеспечении для большей гибкости, если приемопередатчик уже содержит микроконтроллер или другую процессорную систему для других функциональных возможностей, например, измерения мощности принимаемого сигнала передатчика, изменения скорости передачи битов и др.
[0161] На фиг. 12 приведена иллюстрация системы 1200 энергоснабжения оптической системы для выполнения сейсмической разведки в водной среде. В некоторых вариантах осуществления система 1200 содержит пробуждающую подсистему 1225, выполненную с возможностью выполнения процесса определения, который может потреблять малую энергию (например, от 0 ватт до 1 ватта), и процесса подтверждения. Система 1200 может определять, установлена ли линия связи (например, оптическая линия связи) соответствующим образом, и действует ли она правильно (например, с использованием параметров контроля качества, таких как частота появления ошибочных битов, или других протоколов установление связи). В некоторых вариантах осуществления потребление энергии может быть порядка сотни микроватт. В некоторых вариантах осуществления система 1200 может использовать немного энергии не потреблять ее вовсе, за счет извлечения энергии из падающей волны/сигнала, звукового или оптического. Например, система 1200 может приводиться в действие от энергии волн, энергии света, энергии звука или химических реакций. В некоторых вариантах осуществления пробуждающая подсистема 1225 может извлекать энергию из света, подаваемого ROV, AUV или AOV или источником света. В некоторых вариантах осуществления пробуждающую подсистему 1225 может питать специальная, выполненная на заказ или другая отдельная аккумуляторная батарея. Данная отдельная аккумуляторная батарея может быть иной, чем подсистема 1205 питания. В некоторых вариантах осуществления пробуждающая подсистема 1225 может облегчать пуск при нулевой мощности или пуск при очень малой мощности.
[0162] В некоторых вариантах осуществления система 1200 содержит подсистему питания. Подсистема питания может подавать питание к одному или больше компонентов системы 1200, включая, например, 3-осный датчик 1210, подсистему 1215 сбора данных, подсистему1220 хранения и управления, подсистему 1230 извлечения данных и пробуждающую подсистему 1225. В некоторых вариантах осуществления подсистема 1205 питания содержит топливный элемент, блок батарей, конденсатор или другой аккумулятор энергии. В некоторых вариантах осуществления подсистема питания может быть перезаряжаемой. В некоторых вариантах осуществления подсистема 1205 питания может не подавать питание к пробуждающей системе 1225 (например, подсистема 1205 питания может быть не подключена к пробуждающей системе 1225).
[0163] В некоторых вариантах осуществления система 1200 содержит 3-осный датчик 1210. 3-осный датчик может определять, определять или иным образом идентифицировать ориентацию системы 1200 или устройства, содержащего систему 1200 (например, блока OBS-сейсмометра или другого устройства в водной среде). 3-осный датчик может определять идентичность изменения ориентации, перемещение сенсорного устройства или другой параметр, связанный с осью или ориентацией системы 1200. 3-осный датчик может быть связан с возможностью передачи данных с подсистемой 1215 сбора данных и передавать данные к подсистеме 1215 сбора данных.
[0164] В некоторых вариантах осуществления система 1200 содержит подсистему 1215 сбора данных. Подсистема 1215 сбора данных может быть выполнена с возможностью приема данных от 3-осного датчика 1210 и передачи этих данных в подсистему хранения и управления или пробуждающую подсистему 1225. Подсистема сбора данных может содержать одну или больше логических матриц, микропроцессоров или других схем для сбора и передачи данных между одним или большим количеством компонентов системы 1200.
[0165] В некоторых вариантах осуществления система 1200 содержит подсистему 1220 хранения и управления. Подсистема 1220 хранения и управления может содержать одну или больше логических матриц, микропроцессоров или других схем для сбора и передачи данных между одним или большим количеством компонентов системы 1200. Подсистема 1220 хранения и управления может быть выполнена с возможностью поддержания связи с пробуждающей системой 1225 для инициирования подачи питания к различным компонентам системы 1200. В некоторых вариантах осуществления подсистема 1220 хранения и управления может способствовать контролю живых существ в водной среде, таких как рыбы, млекопитающие или другие морские существа.
[0166] В некоторых вариантах осуществления система 1200 содержит подсистему 1230 извлечения, предназначенную и выполненную для извлечения данных, хранящихся, например, в подсистеме хранения и управления, полученных через другой компонент системы 1200, и для передачи этих данных с помощью передатчика 1235. В некоторых вариантах осуществления подсистема 1230 извлечения может содержать одну или больше логических матриц, процессоров или других схем. В некоторых вариантах осуществления подсистема 1230 извлечения может преобразовывать данные из одного формата в другой формат для передачи. В некоторых вариантах осуществления подсистема 1230 извлечения может включать в себя управление мощностью, интерфейс запоминающего устройства, интерфейс линии связи и процессор. Интерфейс линии связи может быть связан с возможностью передачи данных с передатчиком 1235.
[0167] В некоторых вариантах осуществления система 1200 содержит передатчик 1235. Передатчик 1235 может передавать данные, используя, например, оптические сигналы, радиочастотные сигналы или электрические сигналы, по проводу или кабелю. В некоторых вариантах осуществления передатчик 1235 может включать в себя линию связи Ethernet или другой интерфейс для передачи данных.
[0168] В некоторых вариантах осуществления система 1200 содержит детектор 1240, связанный с возможностью передачи данных с пробуждающей подсистемой 1225. Детектор 1240 может содержать фотодетектор, акустический детектор, детектор движения, детектор приближения, магнитный детектор, или другой датчик, который способствует обеспечению индикации пробуждающей подсистемой 1225 для пробуждения или питания одного или больше компонентов системы 1200 или другой системы для выполнения сейсморазведки.
[0169] Хотя в данном документе описаны и проиллюстрированы различные варианты осуществления, специалисту в данной области будет легко представить себе множество других средств и/или конструкций для выполнения функций и/или получения результатов и/или одного или больше преимуществ, описанных в настоящем документе, и каждый из такого множества вариантов и/или модификаций считается попадающим в объем описанных здесь вариантов осуществления настоящего изобретения. В общем, специалистам в данной области легко понять, что все описанные здесь параметры, размеры, материалы и конфигурации являются лишь примерами, и что все реальные параметры, размеры, материалы и/или конфигурации будут зависеть от конкретного применения или применений, в которых используются принципы настоящего изобретения. Специалистам в данной области будет понятно, или они смогут установить при использовании не более чем обычных экспериментов многие эквиваленты конкретных вариантов осуществления настоящего изобретения, описанных здесь. Поэтому должно быть понятно, что вышеуказанные варианты осуществления представлены лишь в виде примера и что, в пределах прилагаемой формулы изобретения и ее эквивалентов варианты осуществления настоящего изобретения могут быть осуществлены иным образом, чем конкретно описано и заявлено. Предлагаемые варианты осуществления настоящего изобретения направлены на каждую отдельную описанную здесь функцию, систему, изделие, материал, комплект и/или способ. Кроме того, любое сочетание двух или больше функций, систем, изделий, материалов, комплектов и/или способов, не являющееся взаимно несовместимым, входит в объем настоящего изобретения.
[0170] Вышеупомянутые варианты осуществления могут быть реализованы в любом из многочисленных способов. Например, варианты осуществления могут быть реализованы с использованием аппаратного обеспечения, программного обеспечения или их сочетания. При реализации в программном обеспечении программный код может быть выполнен на любом подходящем процессоре или совокупности процессоров, представленных на одном компьютере или распределенных между несколькими компьютерами.
[0171] Кроме того, компьютер может иметь одно или больше устройств ввода и вывода данных. Эти устройства можно использовать, среди прочих, для представления пользовательского интерфейса. Примеры устройств вывода, которые могут быть использованы для представления пользовательского интерфейса, включают в себя принтеры или дисплейные экраны для визуального представления выходных данных и динамики или другие генерирующие звук устройства для звукового представления выходных данных. Примеры устройств ввода, которые могут использоваться для пользовательского интерфейса, включают в себя клавиатуры и указывающие устройства, такие как мышь, сенсорные панели и цифровые планшеты. В качестве другого примера компьютер может принимать входную информацию через распознавание речи или другой звуковой формат.
[0172] Такие компьютеры могут быть соединены между собой с помощью одной или больше сетей в любой подходящей форме, включая локальную сеть или глобальную сеть, такую как сеть предприятия, и интеллектуальная сеть (IN) или Интернет. Такие сети могут быть основаны на любой подходящей технологии и могут работать в соответствии с любым подходящим протоколом, и могут включать в себя беспроводные сети, проводные сети или оптоволоконные сети.
[0173] Компьютер, используемый для реализации по меньшей мере части функциональных возможностей, описанных в настоящем документе, может содержать память, один или больше блоков обработки (также называемых здесь «процессоры»), один или больше интерфейсов связи, один или больше устройств отображения и один или больше пользовательских устройств ввода. Память может включать в себя любые машиночитаемые носители, и может хранить компьютерные команды (также называемые здесь «исполняемые процессором команды») для осуществления различных функциональных возможностей, описываемых в настоящем документе. Обрабатывающее устройство (устройства) могут быть использованы для выполнения команд. Интерфейс (интерфейсы) связи могут быть связаны с проводной или беспроводной сетью, шиной или другими средствами связи и могут, следовательно, обеспечивать компьютеру возможность передачи информации и/или приема информации от других устройств. Устройство (устройства) отображения могут быть предусмотрены, например, чтобы позволить пользователю просматривать различную информацию в связи с выполнением команд. Пользовательское устройство (устройства) ввода могут быть предусмотрены, например, чтобы позволить пользователю выполнять корректировки вручную, делать выбор, вводить данные или другую разнообразную информацию и/или взаимодействовать любым из множества способов с процессором во время выполнения команд.
[0174] Разнообразные способы или процессы, описанные в настоящем документе, могут быть закодированы в виде программы, выполняемой на одном или больше процессоров, которые используют какую-либо одну из разнообразных операционных систем или платформ. Кроме того, такое программное обеспечение может быть записано с использованием языков программирования и/или средств программирования или написания сценариев, а также может быть составлено в виде выполняемого кода на языке программирования или промежуточного кода, который выполняется в интегрированной среде или виртуальной машине.
[0175] В этом отношении различные принципы изобретения могут быть воплощены в виде машиночитаемого носителя памяти (или множества машиночитаемых носителей памяти) (например, компьютерная память, одна или несколько дискет, компакт-диски, оптические диски, магнитные ленты, флэш-памяти, конфигурации схемы в программируемых пользователем вентильных матрицах или других полупроводниковых приборах, или другой энергонезависимый носитель или материальная компьютерная запоминающая среда) кодируемого с помощью одной или больше программ, которые при выполнении на одном или больше компьютеров или других обрабатывающих устройств выполняют способы, реализующие различные варианты осуществления настоящего изобретения, описанные выше. Машиночитаемый носитель или носители могут быть переносимыми, так что программа или программы, сохраненные на них, могут быть загружены на один или больше различных компьютеров или других обрабатывающих устройств для реализации различных аспектов настоящего изобретения, как описано выше.
[0176] Термины «программа» или «программное обеспечение» используются здесь в общем смысле для обозначения любого типа компьютерного кода или набора выполняемых на компьютере команд, которые могут быть использованы для программирования компьютера или другого обрабатывающего устройства для реализации различных аспектов вариантов существования, как указано выше. Кроме того, должно быть понятно, что в соответствии с одним из аспектов одна или больше компьютерных программ, которые при выполнении осуществляют способы согласно настоящему изобретению, не обязательно находятся на одном компьютере или обрабатывающем устройстве, а могут быть распределены по модульному принципу между несколькими различными компьютерами или обрабатывающими устройствами для реализации различных аспектов настоящего изобретения.
[0177] Выполняемые на компьютере команды могут существовать в различных формах, таких как программные модули, выполняемые на одном или больше компьютеров или других устройств. Как правило, программные модули включают в себя подпрограммы, программы, объекты, компоненты, структуры данных и др., которые выполняют конкретные задачи или реализуют конкретные абстрактные типы данных. Как правило, функциональные возможности программных модулей могут быть объединены или распределены по необходимости в различных вариантах осуществления.
[0178] Кроме того, структуры данных могут быть сохранены в машиночитаемых носителях в любой подходящей форме. Для простоты иллюстрации могут быть отображены структуры данных, чтобы иметь области, которые связаны через ячейку в структуре данных. Такие связи могут быть установлены также путем назначения запоминающего устройства для областей с ячейками в машиночитаемом носителе, которые передают связь между областями. Однако для установления связи между информацией в областях структуры данных может использоваться любой подходящий механизм, в том числе, путем использования указателей, тегов или других механизмов которые устанавливает связь между элементами данных.
[0179] Кроме того, различные принципы изобретения могут быть реализованы в виде одного или больше способов, из которых были приведены примеры. Действия, выполняемые как часть способа, могут быть упорядочены любым подходящим способом. Соответственно, могут быть созданы варианты осуществления, в которых действия выполняются в порядке, отличающемся от иллюстрируемого, который может включать в себя выполнение нескольких действий одновременно, хотя в иллюстративных вариантах осуществления они показаны как последовательные действия.
[0180] Все определения, оговоренные и используемые в настоящем документе, следует понимать как главенствующие над словарными определениями, определениями в документах, включенных посредством ссылки и/или обычными значениями указанных терминов.
[0181] Неопределенные артикли, используемые в описании и пунктах формулы, если явно не указано обратное, следует понимать в значении «по меньшей мере один».
[0182] Выражение «и/или», используемое в описании и пунктах формулы, следует понимать в значении «любой из двух или оба вместе» из элементов, объединенных таким образом, т. е., элементов, которые вместе присутствуют в некоторых случаях, и по отдельности присутствуют в других случаях. Множество элементов, приведенных с выражением «и/или», следует толковать таким же образом, т. е. «любой из двух или оба вместе» из элементов, объединенных таким образом. При необходимости могут присутствовать другие элементы, иные, чем элементы, специально обозначенные выражением «и/или», связанные или не связанные, которые специально обозначены. Таким образом, в качестве не имеющего ограничительного характера примера, ссылка на «A и/или B» при использовании в сочетании с не ограничительной формулировкой, такой как «содержащий», может относиться в одном варианте осуществления только к A (при необходимости включая иные элементы, чем B),в другом варианте осуществления только к B (при необходимости включая иные элементы, чем A),в еще одном варианте осуществления, как к A, так и к B (при необходимости включая другие элементы),и т. д.
[0183] Используемое в описании и пунктах формулы выражение «или» следует понимать, как имеющее тот же смысл, что и «и/или», указанное выше. Например, при разделении элементов в списке «или» или «и/или» следует интерпретировать, как включающее, т. е., включающее по меньшей мере один, но также включающее больше чем один, число или список элементов, и при необходимости, дополнительные не перечисленные элементы. Только термины, явно указывающие противоположное, такие как «только один из» или «именно один из», или, при использовании в пунктах формулы, «состоящий из», должны относиться к включению именно одного элемента из числа или списка элементов. В общем, термин «или», используемый здесь, должен интерпретироваться только как означающий исключающие варианты (т. е. «один или другой, но не оба», если ему предшествуют термины исключительности, такие как «либо», «один из», «только один из» или «именно один из». Выражение «состоящий по существу из» при использовании в пунктах формулы изобретения должно иметь обычное значение, используемое в области патентного права.
[0184] Используемое в описание и пунктах формулы выражение «по меньшей мере один» со ссылкой на список из одного или более элементов, следует понимать в значении по меньшей мере один элемент, выбранный из одного или больше элементов в списке элементов, но не обязательно включающий по меньшей мере один из каждого и каждый элемент, конкретно указанный в списке элементов, и не исключающий какие-либо сочетания элементов в списке элементов. Данное определение также допускает, что при необходимости могут присутствовать другие элементы, кроме элементов, специально указанных в списке элементов, к которым относится выражение «по меньшей мере один», связанное или не связанное с теми элементами, которые специально указаны. Таким образом, в качестве не имеющего ограничительного характера примера, «по меньшей мере один из A и B» (или эквивалентно «по меньшей мере один из A или B») может относиться в одном варианте по меньшей мере к одному, необязательно включающему больше, чем один, A, при отсутствии B (и необязательно, включающему элементы, иные, чем B),в другом варианте, по меньшей мере к одному, необязательно включающему больше чем один B, при отсутствии A (и необязательно, включающему элементы, иные, чем A),в еще одном варианте, по меньшей мере к одному, необязательно включающему больше чем один A, и по меньшей мере одному необязательно включающему больше чем один B (и необязательно включающему другие элементы),и т. д.
[0185] В формуле изобретения, а также по приведенным выше описание все переходные выражения, такие как «содержащий», «включающий», «несущий», «имеющий», «вовлекающий», «держащий», «состоящий из» и другие следует понимать как не ограничительные, т. е., в значении включающий, помимо прочего. Только переходные выражения «состоящий из» и «состоящий по существу из» должны быть ограничительными или полуограничительными переходными выражениями, соответственно, как изложено в Руководстве по методике патентной экспертизы Патентного ведомства США, раздел 2111.03.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНАЯ СИСТЕМА ПЕРЕДАЧИ ДАННЫХ С ВЫСОКОЙ ПРОПУСКНОЙ СПОСОБНОСТЬЮ | 2014 |
|
RU2660382C1 |
| ПОДВОДНАЯ СИСТЕМА ПЕРЕДАЧИ ДАННЫХ С ВЫСОКОЙ ПРОПУСКНОЙ СПОСОБНОСТЬЮ | 2014 |
|
RU2624629C2 |
| Устройство доставки и извлечения, способ и применения | 2013 |
|
RU2628418C2 |
| СПОСОБЫ СПУСКА И ПОДЪЕМА ДЛЯ ПОГРУЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ И ДРУГИХ ПОЛЕЗНЫХ ГРУЗОВ | 2012 |
|
RU2623293C2 |
| ПОДВОДНАЯ ГЕОФИЗИЧЕСКАЯ СТАНЦИЯ | 2010 |
|
RU2435180C1 |
| СЕЙСМИЧЕСКАЯ РАЗВЕДКА | 2006 |
|
RU2396578C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ИНСПЕКТИРОВАНИЯ ПОДВОДНЫХ ТРУБОПРОВОДОВ | 2011 |
|
RU2635751C2 |
| Заякоренная профилирующая подводная обсерватория | 2015 |
|
RU2617525C1 |
| СИСТЕМА ПОДВОДНОЙ СЕЙСМОРАЗВЕДКИ НА МОРЕ | 2020 |
|
RU2755001C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2004 |
|
RU2416810C2 |



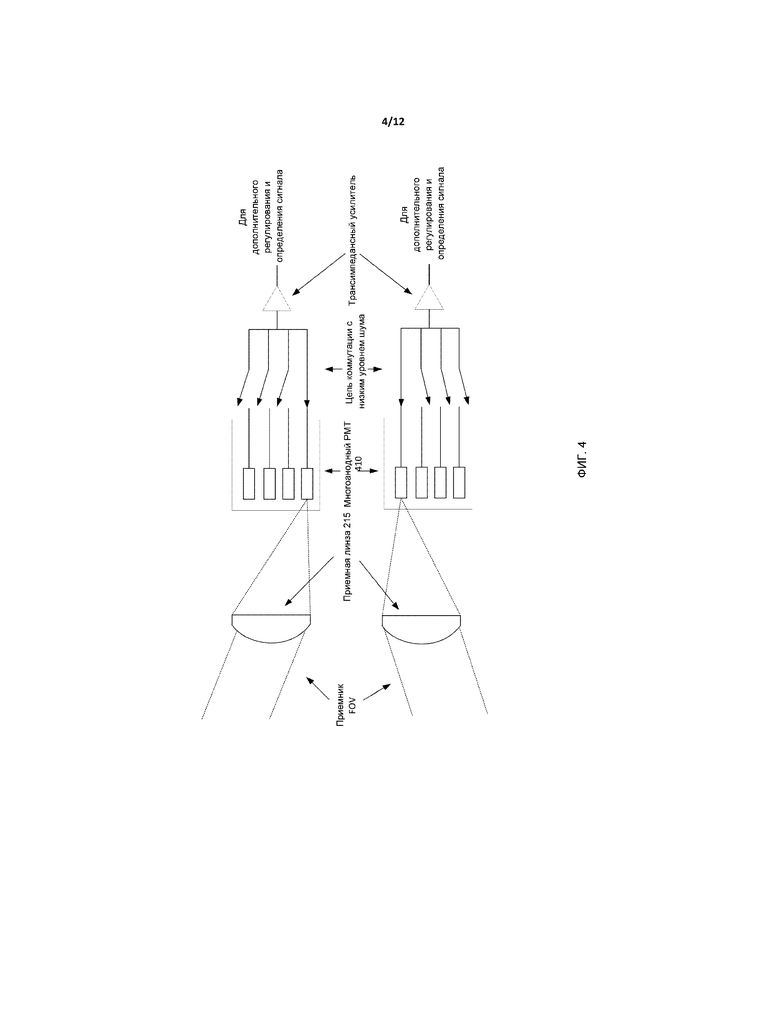


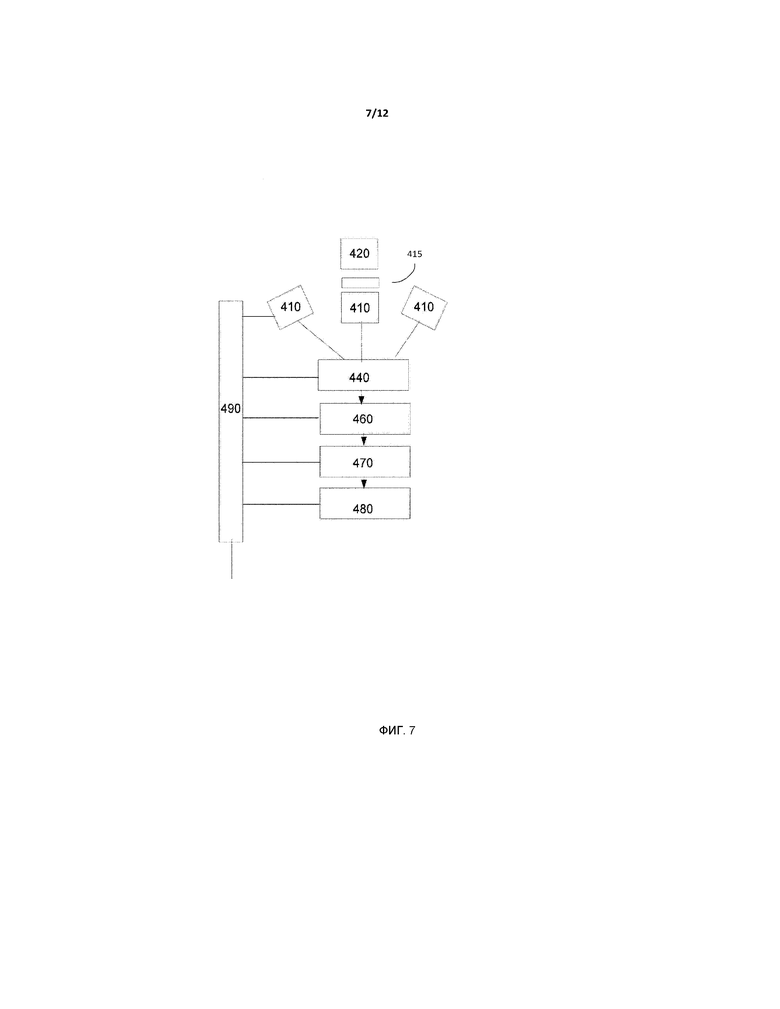





Изобретение относится к технике связи и может использоваться для подводных систем оптической связи. Технический результат состоит в повышении качества передачи информации. Для этого предложено устройство, которое использует светоизлучающие диоды (LED) на основе InGaN с прямой модуляцией или лазеры на основе InGaN в качестве передатчиков для подводного устройства передачи данных. Приемник использует автоматическое управление коэффициентом усиления для облегчения функционирования устройства в широком диапазоне расстояний и мутности воды. 2 н. и 18 з.п. ф-лы, 12 ил.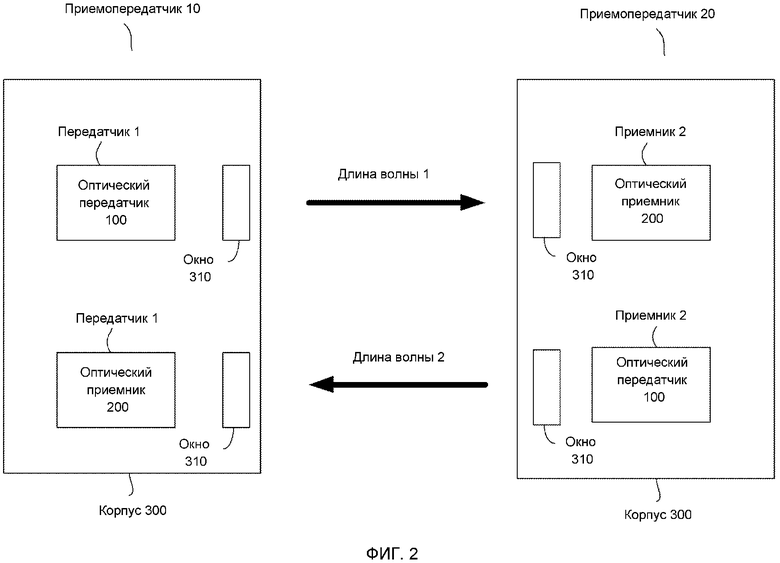
1. Система для осуществления сейсморазведки в водной среде, включающая в себя:
детектор для обеспечения индикации пробуждающей системе включить одно или более из системы хранения и управления, датчика или оптического передатчика;
причем пробуждающая система в ответ на индикацию от детектора функционирует, чтобы:
идентифицировать оптическую линию связи, установленную посредством оптического передатчика через водную среду,
определить параметр контроля качества оптической линии связи и
подтвердить на основании параметра контроля качества оптическую линию связи, установленную посредством оптического передатчика через водную среду; а
система хранения и управления функционирует, вынуждая оптический передатчик передавать по оптической линии связи, подтвержденной пробуждающей системой, данные, указывающие на воспринятый датчиком параметр.
2. Система по п. 1, включающая в себя:
детектор, содержащий фотодетектор для обнаружения света и обеспечения индикации пробуждающей системе в ответ на обнаружение света.
3. Система по п. 1, включающая в себя:
детектор, содержащий детектор движения для обнаружения движения и обеспечения индикации пробуждающей системе в ответ на обнаружение движения.
4. Система по п. 1, включающая в себя:
детектор, содержащий акустический детектор для обнаружения звука и обеспечения индикации пробуждающей системе в ответ на обнаружение звука.
5. Система по п. 1, включающая в себя:
детектор, содержащий по меньшей мере один из детектора движения, магнитного детектора или детектора приближения.
6. Система по п. 1, включающая в себя:
пробуждающую систему, функционирующую для поддержания связи с системой хранения и управления в ответ на упомянутую индикацию для подачи питания от источника питания к системе извлечения данных для извлечения упомянутых данных и подачи питания к оптическому передатчику для передачи упомянутых данных.
7. Система по п. 1, включающая в себя:
пробуждающую систему, функционирующую для включения в ответ на упомянутую индикацию по меньшей мере одного из датчика, системы хранения и управления или оптического передатчика.
8. Система по п. 1, включающая в себя:
пробуждающую систему, функционирующую для подтверждения оптической линии связи с использованием протокола установления связи.
9. Система по п. 1, включающая в себя:
пробуждающую систему, выполненную с возможностью:
оценки ошибочного бита оптической линии связи; и
подтверждения оптической линии связи в ответ на оценку ошибочного бита.
10. Система по п. 1, включающая в себя:
пробуждающую систему, выполненную с возможностью:
установления оптической линии связи с удаленным устройством;
передачи первого оптического сигнала, имеющего первую скорость передачи данных, на это удаленное устройство;
оценки ошибочного бита этого первого оптического сигнала; и
обеспечения индикации для регулировки автоматического управления коэффициентом усиления в ответ на оценку ошибочного бита.
11. Система по п. 1, включающая в себя:
пробуждающую систему, выполненную с возможностью:
оценивать ошибочный бит оптической линии связи; и
увеличивать в ответ на оценку этого ошибочного бита скорость передачи данных оптической линии связи.
12. Система по п. 1, включающая в себя:
датчик, содержащий 3-осный датчик, выполненный с возможностью идентификации изменения в ориентации и выдачи указывающих на это изменение данных системе хранения и управления.
13. Система по п. 1, включающая в себя:
источник питания, выполненный с возможностью преобразования по меньшей мере одной из энергии света, энергии волн или энергии звука в электроэнергию для запитывания по меньшей мере одного из детектора, пробуждающей системы, системы хранения и управления, оптического передатчика или датчика.
14. Система по п. 1, включающая в себя:
блок сейсмометра на дне океана (блок OBS), причем блок OBS содержит упомянутые детектор, пробуждающую систему, датчик, систему хранения и управления и оптический передатчик.
15. Система по п. 1, включающая в себя:
оптический передатчик, функционирующий для преобразования данных из первого формата во второй формат, предназначенный для передачи посредством по меньшей мере одного из оптического сигнала, радиочастотного сигнала или электрического сигнала по кабелю.
16. Способ осуществления сейсморазведки в водной среде, включающий в себя:
обеспечение детектором индикации пробуждающей системе включить одно или более из системы хранения и управления, датчика или оптического передатчика;
идентификацию пробуждающей системой в ответ на упомянутую индикацию от детектора оптической линии связи, установленной посредством оптического передатчика через водную среду;
определение пробуждающей системой в ответ на идентификацию оптической линии связи параметра контроля качества оптической линии связи; и
подтверждение пробуждающей системой на основании параметра контроля качества оптической линии связи, установленной посредством оптического передатчика через водную среду; и
поддержание связи с оптическим передатчиком системой хранения и управления для передачи по оптической линии связи, подтвержденной пробуждающей системой, данных, указывающих на воспринятый датчиком параметр.
17. Способ по п. 16, причем детектор содержит фотодетектор, включающий в себя:
обнаружение света фотодетектором; и
обеспечение фотодетектором индикации пробуждающей системе в ответ на обнаружение света.
18. Способ по п. 16, включающий в себя:
подтверждение оптической линии связи пробуждающей системой с использованием протокола установления связи.
19. Способ по п. 16, включающий в себя:
оценку пробуждающей системой ошибочного бита оптической линии связи; и
подтверждение оптической линии связи пробуждающей системой в ответ на оценку этого ошибочного бита.
20. Способ по п. 16, включающий в себя:
обеспечение блока сейсмометра на дне океана (блока OBS), содержащего упомянутые детектор, пробуждающую систему, датчик, систему хранения и управления и оптический передатчик.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ СЕЙСМИЧЕСКОГО МОНИТОРИНГА В ПРОЦЕССА РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ УГЛЕВОДОРОДОВ НА АКВАТОРИЯХ | 2013 |
|
RU2539745C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

