Изобретение относится к приборам и методам контроля веществ, находящихся в жидком состоянии и может быть использовано для автоматического измерения динамической вязкости жидкости.
Известен способ измерения вязкости жидкости с помощью ротационного вискозиметра и устройство для его реализации (Вискозиметры автоматические ротационные ВАР-5М. Руководство по эксплуатации 5Ж2.842.008 РЭ). Способ заключается в приведении во вращательное движение с постоянной угловой скоростью вращающегося элемента, отделенного от воспринимающего элемента слоем контролируемой жидкости, и измерении момента вращения, действующего на воспринимающий элемент. При этом о вязкости контролируемой жидкости судят по значению момента вращения, действующего на воспринимающий элемент. Устройство содержит привод постоянной угловой скорости, укрепленный на его валу вращающийся элемент, воспринимающий элемент, который установлен на упругом элементе и измерительный преобразователь угла поворота воспринимающего элемента.
Недостатком известного способа является необходимость поддержания постоянной угловой скорости вращающегося элемента.
Технический результат - обеспечение возможности измерения вязкости жидкости на переменных скоростях движения вращающегося элемента.
Технический результат достигается тем, что способ контроля динамической вязкости жидкости, согласно изобретения, динамическая вязкость жидкости при текущей температуру равна произведению динамической вязкости жидкости при начальной температуре на отношение времени разгона системы вращающихся масс «приводной электродвигатель-вал-вращающийся цилиндр» при начальной температуре жидкости ко времени разгона системы «приводной электродвигатель-вал-вращающийся цилиндр» при текущей температуре жидкости на отношение разности времени разгона системы вращающихся приводной «электродвигатель-вал-вращающийся цилиндр» при текущей температуре жидкости и времени разгона системы вращающихся «приводной электродвигатель-вал-вращающийся цилиндр» без жидкости и разности времени разгона системы вращающихся масс «приводной электродвигатель-вал-вращающийся цилиндр» при начальной температуре жидкости и времени разгона системы вращающихся масс «приводной электродвигатель-вал-вращающийся цилиндр» без жидкости.
Новизна заключается в том, что контроль динамической вязкости жидкости осуществляется за счет измерения угловой скорости вращающегося элемента, погруженного в жидкость при разных температурах.
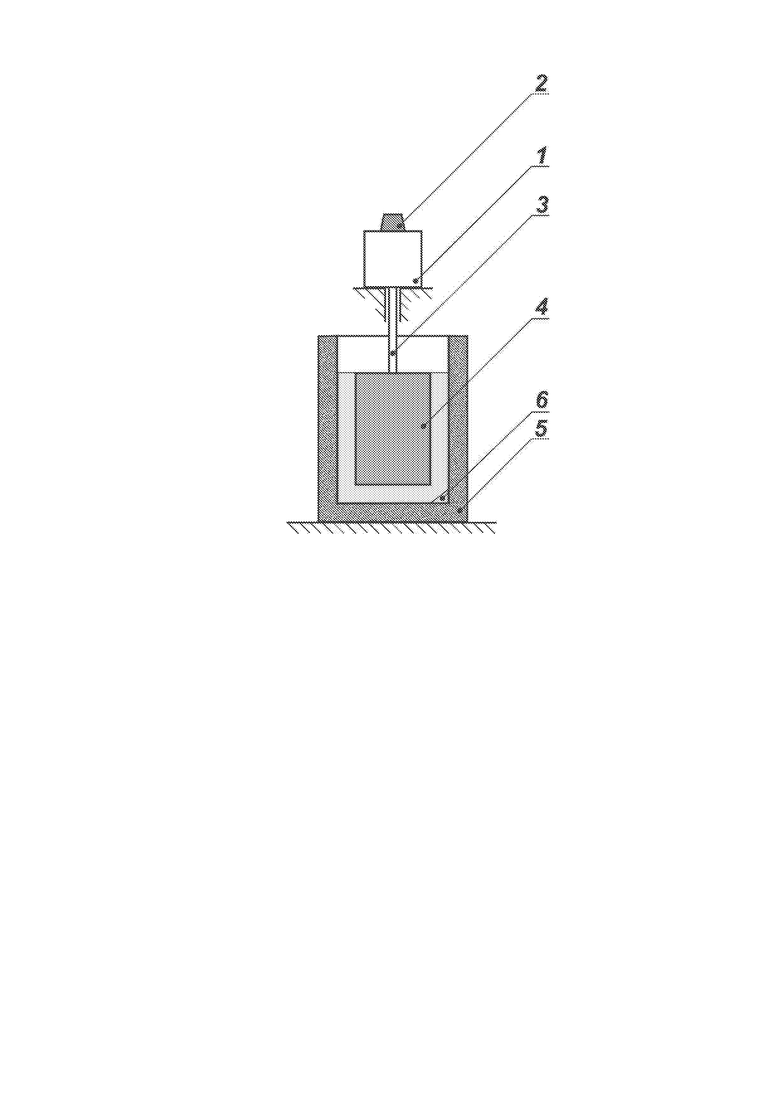
Изобретение поясняется чертежом.
Приводной электродвигатель 1, угловая скорость ротора которого измеряется с помощью энкодера 2, соединен посредством вала 3 с вращающимся цилиндром 4, помещенным внутри неподвижного цилиндра 5, наполненного исследуемой жидкостью, температура которой определяется с помощью датчика температуры 6.
Реализуется предлагаемый динамический метод контроля динамической вязкости жидкости следующим образом.
На начальном этапе, когда вал 3 отсоединен от приводного электродвигателя 1, приводной электродвигатель 1 запускается в пределах от нуля до номинальной угловой скорости и на каждом этапе приращения угловой скорости определяется угловое ускорение:

где dω – изменение угловой скорости, с-1, dt1 – время за которое произошло изменение угловой скорости dω, с.
Для диапазона угловых скоростей от нуля до номинальной угловой скорости среднее значения углового ускорения в выражение (1) принимает вид:
где 

При этом среднее значение вращающего момента М, которое развивает приводной электродвигатель 1, определяется как:

где 

Далее приводной электродвигатель 1 останавливается и к его ротору подсоединяется вал 3 и вращающийся цилиндр 4. Суммарный момент инерции вала 3 и присоединенному к нему вращающегося цилиндра 4 известен (может быть определен методом крутильных колебаний или расчетным методом) и равен 
Затем приводной электродвигатель 1 запускается и определяется значение углового ускорения системы вращающихся масс «приводной электродвигатель 1, вал 3, вращающийся цилиндр 4», на каждом этапе приращения угловой скорости в пределах от нуля до номинальной угловой скорости:

Среднее значения углового ускорения при разгоне приводного электродвигателя 1 от нуля до номинальной угловой скорости, выражение (4) принимает вид:
где 
Среднее значение вращающего момента М, который развивает система вращающихся масс «приводной электродвигатель 1, вал 3, вращающийся цилиндр 4» равно:

Поскольку при первом и втором запуске потери в статоре и роторе приводного электродвигателя 1 остаются неизменными (так как не меняется напряжение, частота питающей сети и температура электродвигателя (сопротивление обмоток статора)), следовательно, в соответствие с энергетической диаграммой электродвигателя, механическая характеристика электродвигателя не меняется. Поэтому правые части выражения (3) и (6) можно приравнять и определить момент инерции вращающихся масс электродвигателя с учетом коэффициента потерь:
При разгоне приводного электродвигателя 1 от нуля до номинальной угловой скорости во время первого и второго запусков:
а 

Подставляя (8) и (9) в (7) получаем:
Далее для контроля динамической вязкости исследуемой жидкости, полностью заполняем пространство между вращающимся цилиндром 3 и неподвижным цилиндром 4 по уровню верхней кромки вращающегося цилиндра 3, определяем температуру исследуемой жидкости с помощью датчика температуры 6 и запускаем приводной электродвигатель 1.
При вращении вращающегося цилиндра 3 будет создаваться сила трения между вращающимся цилиндром 3 и исследуемой жидкостью, которая будет создавать момент трения. Тогда среднее значение вращающего момента М, который развивает система вращающихся масс «приводной электродвигатель 1, вал 3, вращающийся цилиндр 4», определится:

где 

Поскольку при первом, втором и третьем запуске потери в статоре и роторе приводного электродвигателя 1 остаются неизменными (так как не меняется напряжение, частота питающей сети и температура электродвигателя (сопротивление обмоток статора)), следовательно, в соответствие с энергетической диаграммой электродвигателя, механическая характеристика электродвигателя не меняется. Поэтому правые части выражений (6) и (11) приравниваем:

Из (12) с учетом (7), (8), (9), 

Из (13) момент трения, обусловленный вязкостью жидкости:

Зная динамическую вязкость исследуемой жидкости 



Определим время разгона приводного электродвигателя от нуля до номинальной угловой скорости 


Соотношение динамических вязкостей исследуемой жидкости 





Выделим из (17) искомый коэффициент динамической вязкости
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик ротационного измерителя вязкости жидкостей | 1984 |
|
SU1267209A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436055C2 |
| СПОСОБ АДАПТИВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА | 2018 |
|
RU2714022C2 |
| Электровискозиметр | 1981 |
|
SU949418A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СИНХРОННЫМ ДИЗЕЛЬ-ГЕНЕРАТОРОМ | 2011 |
|
RU2488708C2 |
| Способ идентификации тензора присоединенных моментов инерции тела и устройство для его осуществления | 2018 |
|
RU2688964C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2011910C1 |
| РОТАЦИОННЫЙ ВИСКОЗИМЕТР | 2016 |
|
RU2620332C1 |
| СПОСОБ ПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И СТРАРТЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531546C1 |
| СПОСОБ ДОБЫЧИ НЕФТИ | 2017 |
|
RU2645698C1 |
Изобретение относится к методам контроля веществ, находящихся в жидком состоянии, и может быть использовано для автоматического измерения динамической вязкости жидкости. Способ контроля динамической вязкости жидкости при текущей температуре, в котором динамическая вязкость определяется произведением динамической вязкости жидкости при начальной температуре на отношение времени разгона системы вращающихся масс «приводной электродвигатель-вал-вращающийся цилиндр» при начальной температуре жидкости ко времени разгона системы «приводной электродвигатель-вал-вращающийся цилиндр» при текущей температуре жидкости на отношение разности времени разгона системы вращающихся масс приводной «электродвигатель-вал-вращающийся цилиндр» при текущей температуре жидкости и времени разгона системы вращающихся масс «приводной электродвигатель-вал-вращающийся цилиндр» без жидкости и разности времени разгона системы вращающихся масс «приводной электродвигатель-вал-вращающийся цилиндр» при начальной температуре жидкости и времени разгона системы вращающихся масс «приводной электродвигатель-вал-вращающийся цилиндр» без жидкости. Техническим результатом является обеспечение возможности измерения вязкости жидкости на переменных скоростях движения вращающегося элемента. 1 ил.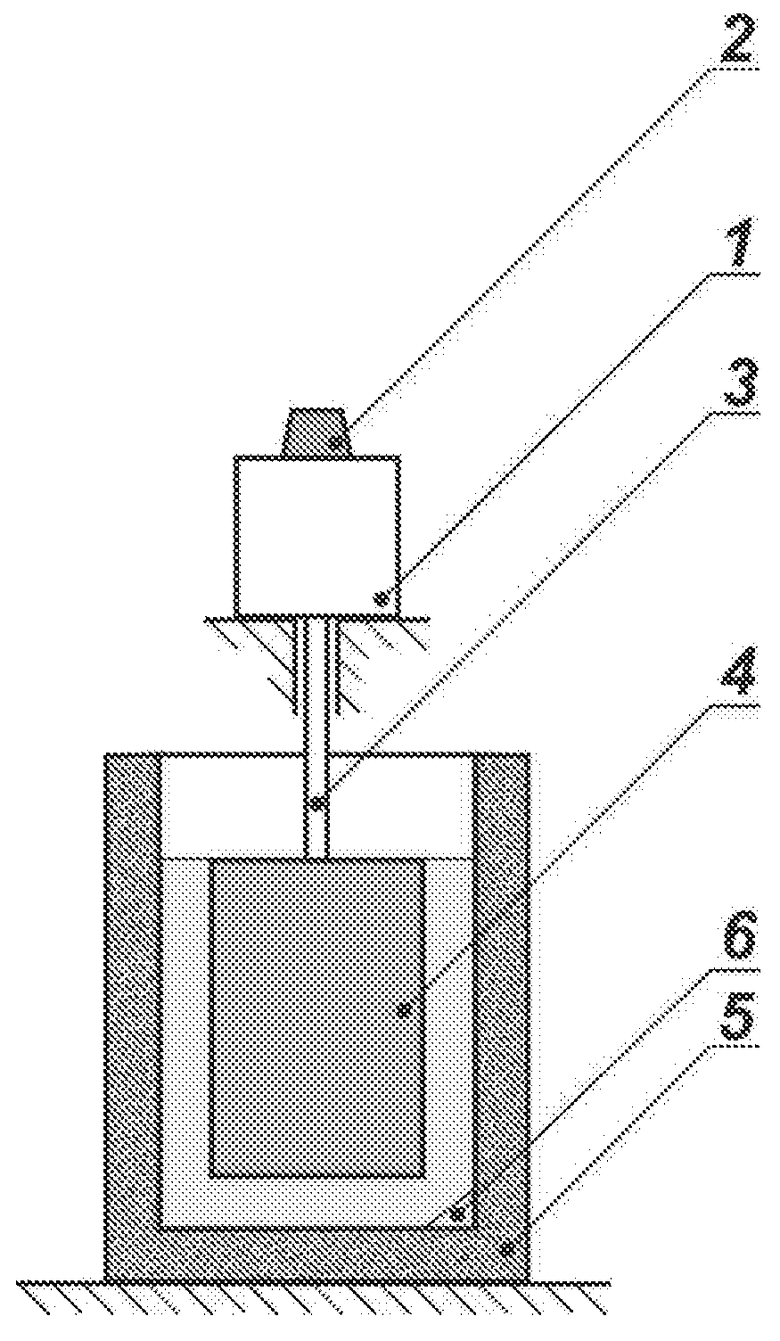
Способ контроля динамической вязкости жидкости отличающийся тем, что динамическая вязкость жидкости при текущей температуре равна произведению динамической вязкости жидкости при начальной температуре на отношение времени разгона системы вращающихся масс «приводной электродвигатель-вал-вращающийся цилиндр» при начальной температуре жидкости к времени разгона системы «приводной электродвигатель-вал-вращающийся цилиндр» при текущей температуре жидкости на отношение разности времени разгона системы вращающихся масс «приводной электродвигатель-вал-вращающийся цилиндр» при текущей температуре жидкости и времени разгона системы вращающихся масс «приводной электродвигатель-вал-вращающийся цилиндр» без жидкости и разности времени разгона системы вращающихся масс «приводной электродвигатель-вал-вращающийся цилиндр» при начальной температуре жидкости и времени разгона системы вращающихся масс «приводной электродвигатель-вал-вращающийся цилиндр» без жидкости.
| СПОСОБ ИЗМЕРЕНИЯ ВЯЗКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2456576C2 |
| WO 1984004388 A1, 08.11.1984 | |||
| ОРГТЕХСТРОМ | 0 |
|
SU347634A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЯЗКОСТИ СУСПЕНЗИЙ | 2006 |
|
RU2343452C2 |
| US 4095461 A1, 20.06.1978. | |||

