Изобретение относится к машиностроению и может быть использовано для определения осевых моментов инерции, тензоров инерции и центров масс тел на подвесах, вращающихся по заданной программе в условиях неизвестного трения и аэродинамического или гидродинамического сопротивления с возможностью синхронно-пропорционального вращения двух рамок подвеса.
Известен способ определения момента и тензора инерции тела (патент РФ №2112227, МПК G01М 1/10, дата приоритета 20.07.1994, опуб. 27.05.1998, Бюл. №15), при котором платформе с закрепленным на ней телом с произвольно направленной в пространстве осью вращения, установленной в опорах, сообщают моментом сил в виде разгонно-тормозного момента любой физической природы, не принимающего близких к нулю значений, однонаправленное динамически квазисимметрическое относительно положения равновесия двухэтапное вращение, имеющее этап разгона с отличным от нуля угловым ускорением, резко переходящий в почти симметричный ему этап торможения, измеряют конечное множество значений угловой скорости платформы в определенных угловых положениях, симметричных относительно положения статического равновесия системы платформа-тело, изменяют на известную переменную величину, удовлетворяющую определенным условиям, приложенный момент и повторно измеряют мгновенные угловые скорости, по которым аналитически определяют осевой момент инерции тела, а после шести испытаний относительно шести различно направленных осей вращения аналитически определяют тензор инерции тела.
Недостатками способа являются невысокие точность и производительность, связанные с тем, что необходимо выполнять шесть испытаний, при этом знать или определять в условиях трения положение статического равновесия системы, соответствующее наиболее низкому положению центра масс, перенастраивать устройство, производить повторные испытания.
Известно устройство для определения тензора и момента инерции изделия (патент РФ №2112227, МПК G01М 1/10, дата приоритета 20.07.1994, опубл. 27.05.1998, Бюл. №15) содержащее платформу с произвольно расположенной в пространстве осью вращения, установленной в неподвижных подшипниковых опорах, захват для закрепления в нем тела, взаимодействующий посредством муфты со стержнем силовой механизм, выполненный в виде упругого четырехпружинного механизма, одна пара пружин которого выполнена в виде предварительно сжатых регулируемыми упорами пружин, контактирующих со стержнем муфты, другая пара пружин работает в пределах двух измерительных интервалов и выключена при повторном испытании.
Недостаткам устройства являются невысокие производительность и точность, обусловленные тем, что оно предназначено для осуществления способа с недостаточной производительностью, содержит последовательность переключений вращения тела с одной оси на другую и обратно, с переходными процессами во время остановок, перевода тела в требуемое угловое положение в переключенном режиме и разгона до требуемой начальной угловой скорости.
Известен способ определения тензора инерции тела с одновременным определением координат центра масс тела (патент РФ №2262678, МПК G01М 1/10, дата приоритета 16.07.2002, опублик. 20.10.2005, Бюл. №29), по которому тело устанавливают на платформу с осью вращения, сообщают этой системе программное замедленное вращение в ограниченной произвольно выбранной угловой зоне и обратное симметричное ускоренное вращение в этой же зоне, повторяющее в обратном порядке замедленное вращение с угловой скоростью противоположного знака, определяют приложенный активный вращающий момент и угловую скорость на множестве угловых положений системы, по которым аналитически определяют осевой момент инерции и две координаты центра масс, и по шести аналогичным испытаниям, производимым при различных угловых положениях тела на платформе, определяют тензор инерции в точке тела и расположение центра масс тела.
Недостатком способа является невысокие производительность и точность, связанные с тем, что приходится выполнять шесть испытаний, разделенных переходными процессами остановок, перевода тела на платформе в новые угловые положения и шестикратное выведение тела на программные движения.
Наиболее близким к изобретению является способ определения тензора инерции тела (патент РФ №2200940, МПК G01М 1/10, дата приоритета 19.07.2000, опубл. 20.03.2003, Бюл. №8), при котором платформе с произвольно направленной осью вращения, установленной в подшипниковой опоре, в условиях неизвестного трения и неизвестного положения центра масс тела активным моментом сил любой физической природы сообщают реверсивно-симметричное движение, содержащее полный тормозной оборот с постепенно убывающей по величине угловой скоростью и полный разгонный оборот в обратном направлении, повторяющий в обратном порядке тормозной оборот с угловой скоростью противоположного знака с допускаемым переходным процессом между двумя оборотами, измеряют множество значений активного вращающего момента, по которым определяют момент инерции тела. и по моментам инерции относительно шести различно направленных осей определяют тензор инерции тела и одновременно с ним аналитически определяют центр масс тела.
Недостатками способа являются невысокие производительность и точность, связанные с тем, что тензор инерции тела определяется на шести испытаниях, разделенных процедурами установления и фиксации тела на платформе в шести различных угловых положениях.
Наиболее близким к изобретению устройством является устройство для определения тензора инерции тела (патент РФ №2200940, МПК G01М 1/10, дата приоритета 19.07.2000, опубл. 20.03.2003, Бюл. №8), содержащее платформу с валом, установленным в подшипниковой опоре, вал с захватом для закрепления тела, установленным на платформе с возможностью его поворота и фиксации в определенных угловых положениях, датчик угла поворота и угловой скорости платформы, автоматизированный электропривод, содержащий электродвигатель и переключатель вращения вала платформы на вращение вала захвата, выполненный в виде конической зубчатой передачи и двух фрикционных электромуфт.
Недостаткам устройства являются невысокая производительность и точность, обусловленные тем, что оно предназначено для осуществления способа с недостаточной производительностью, содержит последовательность переключений вращения тела с одной оси на другую с переходными процессами, состоящими из остановок, переводов тела в требуемое новое угловое положение по отношению к основной оси вращения в переключенном режиме и разгона до требуемой начальной угловой скорости.
Решается задача повышения производительности, точности, расширения области применения на системах программного управления, способных исполнять программные неравномерные симметричные движения вокруг неподвижной точки с постоянным углом нутации, неравномерным изменением угла прецессии и синхронно-пропорциональным с ним изменением угла собственного вращения.
Сущность изобретения заключается в том, что тело размещают во внутренней рамке двухосного двухрамочного карданова подвеса, имеющей цилиндрическую форму, горизонтальную подвижную собственную ось вращения, и внешней рамке с вертикальной осью прецессии, сообщают ему управляемым электродвигателем и упругим закручиваемым элементом реверсивно-симметричное двухосное сферическое движение, состоящее из непрограммного сферического замедленного вращения по углам прецессии и собственного вращения, синхронных и прямопропорциональных между собой с коэффициентом пропорциональности λ≈tgβ≈tg50° и обратного ускоренного, симметричного по отношению к замедленному программному движению в обратном направлении по программе, построенной по текущим замерам тормозного движения. На таком реверсивном симметричном сферическом движении, измеряют расходы электроэнергии на десяти интервалах угла собственного поворота с величинами 72°. По двадцати значениям расходов энергии с вычетом тепловых омических расходов в обмотках вычисляют пять осевых моментов инерции относительно пяти положений в теле мгновенной оси вращения. Эти оси расположены на подвижном аксоиде - круговом конусе, которые образуют с собственной осью внутренней рамки подвеса неизменный угол β≈50°. Шестой осевой момент инерции определяют отдельно на вращательном движении тела вокруг вертикальной оси прецессии при отключенном собственном вращении с замерами расхода энергии. По шести найденным осевым моментам инерции тела аналитически определяют тензор инерции тела в точке пересечения двух осей подвеса.
Сущность заключается в том, что в устройстве, содержащем двухосный карданов подвес, имеющим внешнюю рамку с валом и внутреннюю рамку-платформу с валом с возможностью размещения в ней тела, автоматизированного электропривода в виде электродвигателя и зубчатого передаточного механизма с переключающими муфтами, внутренняя рамка выполнена в виде полого осесимметричного цилиндра, электродвигатель содержит упругий элемент в виде закручиваемого торсиона, составляющего с ним гибридный двигатель, а передаточный зубчатый механизм состоит из конического колеса, сцепленного с цилиндром, соосного с внутренним валом, и неподвижного конического колеса, соосного с внешней рамкой с возможностью отключения его электромуфтами посредством продольного перемещения с одновременным отключением вращения внутренней рамки.
В изобретении предлагается применение гибридных двигателей, состоящих из электродвигателей и упругих элементов с возможностью предварительной начальной зарядки системы кинетической и упругой потенциальной энергиями, при этом электродвигатель лишь корректирует реверсивно-симметричное движение с малым расходом энергии в процессе испытаний.
Сущность предлагаемого изобретения поясняют Фиг.1-3, где на Фиг.1 показано устройство для осуществления метода в виде двухосного карданова подвеса с взаимно перпендикулярными осями прецессии Oz1 и собственного вращения Oz корпуса 1, гибридным двигателем, состоящим из электродвигателя с датчиком угол - код 2, валом 3, и полого закрученного торсиона 4, внешней рамки 5, имеющей общий вал с ротором двигателя, внутренней рамки цилиндрической формы 6 с возможностью размещения в ней тела, валом внутренней рамки 7 и стопорной муфты 8 планетарного зубчатого механизма с подвижным колесом 9, закрепленным на поверхности цилиндра, и неподвижным колесом 10 с переключающей муфтой 11. Линия OL является мгновенной осью вращения внутренней рамки.
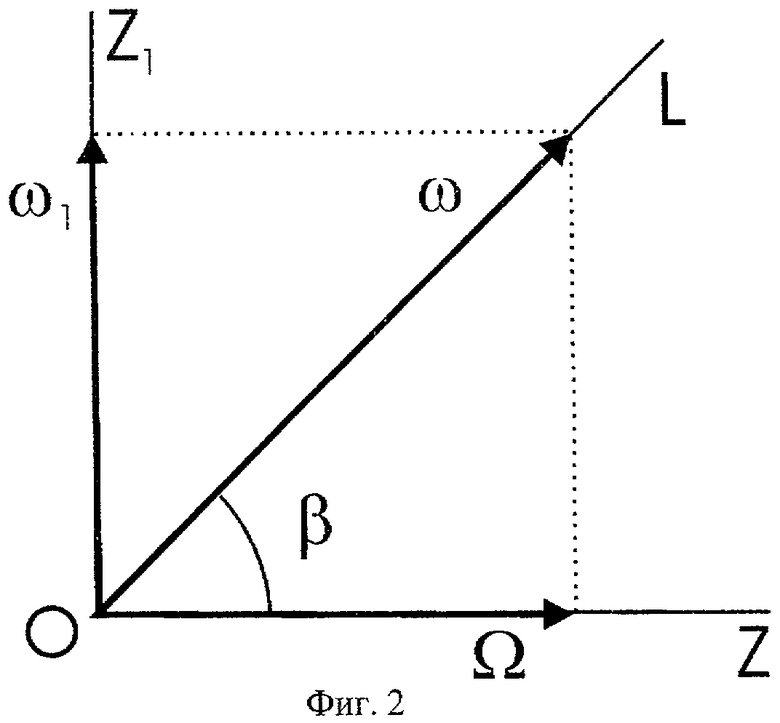
На Фиг.2 показана угловая скорость  сферического движения внутренней рамки и тела в виде суммы угловой скорости прецессии
сферического движения внутренней рамки и тела в виде суммы угловой скорости прецессии  и угловой скорости собственного вращения
и угловой скорости собственного вращения  с углом β=50° между мгновенной осью вращения и собственной осью.
с углом β=50° между мгновенной осью вращения и собственной осью.
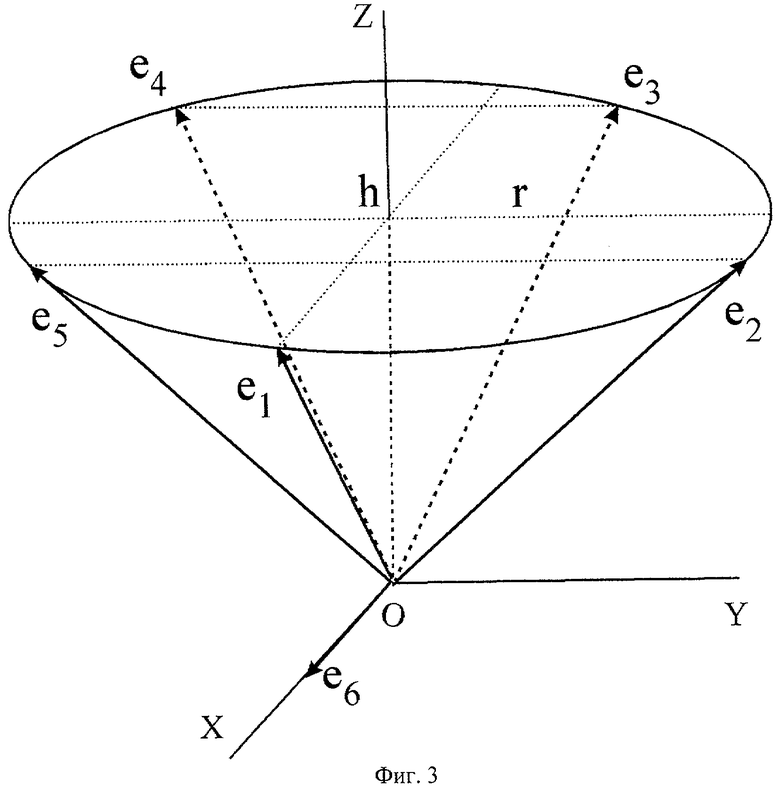
На Фиг.3 показан подвижный аксоид сферического движения внутренней рамки с телом в виде кругового конуса с осью симметрии Oz и углом между образующими и этой осью, равным 50°. Показаны орты е1…e5 пяти положений мгновенной оси на конусе, шестой орт e6 совпадает с ортом оси Oz1.
Устройству в виде двухосного карданова подвеса (Фиг.1) с вертикальной осью Oz1 прецессии внешней рамки 5 и горизонтальной подвижной осью 7 собственного вращения внутренней рамки 6, имеющей цилиндрическую форму, вместе с размещенным в ней телом сообщают реверсивно-симметричное вращение вокруг собственной оси 7 с угловой скоростью , синхронное с прецессионным вращением вокруг оси 5, пропорциональное ему с определенным коэффициентом пропорциональности ω1=λΩ; ψ=λφ между углом прецессии и углом собственного вращения, выбираемым из условия, чтобы вектор  угловой скорости сферического движения описывал в теле подвижный аксоид в виде кругового конуса с образующей, отклоненной от собственной оси на угол β=50° (Фиг.2). Предварительным разгоном с закручиванием торсиона 4 обеспечивается достаточно большой запас начальной кинетической и потенциальной энергии системы для выполнения устройством двухоборотного тормозного вращения по собственному углу в том же направлении в условиях дальнейшего закручивания торсиона с потерей кинетической энергии при отключении электродвигателя.
угловой скорости сферического движения описывал в теле подвижный аксоид в виде кругового конуса с образующей, отклоненной от собственной оси на угол β=50° (Фиг.2). Предварительным разгоном с закручиванием торсиона 4 обеспечивается достаточно большой запас начальной кинетической и потенциальной энергии системы для выполнения устройством двухоборотного тормозного вращения по собственному углу в том же направлении в условиях дальнейшего закручивания торсиона с потерей кинетической энергии при отключении электродвигателя.
Датчик угол-код замеряет множество узловых значений угла прецессии. Компьютерная программа методом аппроксимации определяет кинематическое уравнение вращения вида ψ=ψ(t), на основании которого составляет уравнение программного обратного симметричного движения, а также дополнительно определяются значения угловых скоростей. Одновременно замеряется множество угловых значений расходов энергии. Допускается выбег системы за пределы двух оборотов по углу φ. Затем выполняется программное симметричное обратное движение по построенному функциональному уравнению, управляемое электродвигателем с замерами текущего расхода электроэнергии. Обратное движение осуществляет в основном торсион, а электродвигатель выполняет в основном регулирующую роль, в связи с этим он может быть маломощным. Испытания повторяют один раз, но с отключением вращения внутренней рамки, при этом интервал изменения угла Ψ можно назначить произвольным. По множеству замеров текущего расхода электроэнергии и значений угловой скорости на этапах торможения и разгона вычисляется матрица тензора инерции тела.
Выбираются пять положений на аксоиде мгновенной оси вращения, равномерно распределенных по его поверхности, относительно которых и определяются осевые моменты инерции тела по замерам угловой скорости и углов поворота ротора двигателя и по текущему расходу электроэнергии. Шестой момент инерции тела определяется на реверсивно-симметричном вращательном движении вокруг вертикальной оси прецессии с отключенным собственным вращением тела, с определенным зафиксированным собственным углом поворота. По найденным шести осевым моментам инерции вычисляется тензор инерции тела в неподвижном центре - в точке пересечения двух осей устройства, представленный в виде матрицы инерции в связанной с телом системе координат.
Основные отличия заявленного способа и устройства.
Платформа для размещения тела во внутренней рамке подвеса снабжена цилиндрическим кожухом с торцами в виде дисков, этим обеспечивается независимость от углов поворота приведенного момента инерции подвеса и независимость момента сопротивления окружающей среды от направления вращения; пять осевых моментов находятся на одном сферическом движении с синхронным вращением рамок подвеса. Вместо шести испытаний, разделенных переходными процессами, остановки, повторной выставки и запуска предлагается два испытания, в одном из которых применяется сферическое двухосное движение тела, причем переходный процесс между двумя движениями осуществляется простым образом и допускает объединение этих двух движений в одно непрерывное движение, что повышает быстродействие и точность. Вместо программных движений предлагаются к применению реверсивно-симметричные движения, состоящие из любого удобного для исполнения неуправляемого непрограммного замеряемого тормозного движения, за которым следуют после реверса программное обратное ускоренное движение, рассчитанное по замерам тормозного движения. В способе предлагается вместо замеров разностей работ активных сил электродвигателя, выполняемых на разгонном и тормозном этапах реверсивно-симметричного движения, использовать разности потребляемой им электроэнергии с вычетом разностей омических потерь электроэнергии в электрических контурах в виде теплового излучения, а также энергии, потребляемой на изменение электрического поля, последнее можно оценить посредством испытаний на типовых образцах. Вместо мощного управляемого электродвигателя предлагается к применению в устройстве гибридного двигателя, состоящего из упругого элемента - закрученного торсиона с достаточной емкостью потенциальной энергии - и маломощного управляемого электродвигателя, корректирующего обратное движение. Предварительное закручивание торсиона может выполняться отдельно. Применение гибридного двигателя позволяет пренебречь разностью омических потерь в контурах электродвигателя, ввиду их малости, или учесть приблизительно. Предлагается простейшая конструкция передаточного планетарного механизма в виде двух конических колес.
Устройство (Фиг.1), также как и прототип, имеет две оси карданова подвеса, но отличается тем, что оси рамок взаимно перпендикулярны, внутренняя рамка подвеса имеет цилиндрическую форму, изменена конструкция передаточного механизма, который здесь должен обеспечивать одновременное синхронное прямопропорциональное вращение двух рамок (вместо поочередного вращения), введен в конструкцию торсион, составляющий вместе с электродвигателем единый гибридный привод, предусмотрена предварительная зарядка системы кинетической энергией посредством придания системе начальной угловой скорости и придания потенциальной энергии посредством начальной закрутки торсиона. Начальная механическая энергия придается системе к началу тормозного движения либо электродвигателем, либо привлечением дополнительных средств. Эти отличия внесены с целью уменьшения расхода электроэнергии в период испытаний и тем самым уменьшения омических потерь в обмотках электродвигателя (не удовлетворяющих условию равенства потерь энергии на тормозном и обратном движениях, вычисляются через замеры тока и расходов электроэнергии по известным формулам). В результате программное движение обеспечивается в основном за счет перераспределения механической энергии, предварительно запасенной в системе, а электродвигателю отводится корректирующая роль на обратном разгонном движении, при этом он должен создавать лишь небольшой крутящий момент для преодоления приведенного момента трения в системе. Этим упрощается учет омических потерь в цепях электродвигателя, которыми в ряде случаев можно будет пренебречь или учесть приближенно и обеспечивается возможность применения маломощных двигателей.
Рассмотрим движение голономной стационарной системы (Фиг.1), состоящей из двухосного карданова подвеса с вертикальной осью прецессии Oz1, горизонтальной подвижной осью собственного вращения Oz с синхронным изменением углов прецессии и собственного вращения в форме голономной связи ψ=λφ, λ=const; тестируемого тела, размещенного во внутренней рамке; торсиона, ротора электродвигателя, соосного с внешней рамкой и планетарного передаточного механизма на внутреннюю рамку, имеющую форму полого цилиндра с дисковыми торцами. Эта система имеет одну степень свободы, за обобщенную скорость и обобщенную координату примем элементы фазового вектора-строки  . Предполагаем, что приложенные к системе силы и пары сил обеспечивают осуществление реверсивно-симметричного сферического движения, состоящего из замедленного неуправляемого вращения в отрицательном направлении, реверса и обратного ускоренного вращения в положительном направлении, повторяющего в обратном порядке предыдущее движение. Все параметры тормозного движения будем помечать штрихом, например [Ω', φ', t'] и [Ω, φ, t] - расширенные фазовые векторы-строки состояний системы на тормозном и разгонных движениях. При этом каждому положительному состоянию [Ω>0, φ>0, t>0] сопоставляем обратное симметричное состояние [Ω'=-Ω, φ'=φ, t'] с соотношением моментов времени t-t0=t0-t' или t'=2t0-t, t=2t0-t', где t0≡t'r - момент реверса при состоянии [Ω'=0, φ'=φr=φ0,
. Предполагаем, что приложенные к системе силы и пары сил обеспечивают осуществление реверсивно-симметричного сферического движения, состоящего из замедленного неуправляемого вращения в отрицательном направлении, реверса и обратного ускоренного вращения в положительном направлении, повторяющего в обратном порядке предыдущее движение. Все параметры тормозного движения будем помечать штрихом, например [Ω', φ', t'] и [Ω, φ, t] - расширенные фазовые векторы-строки состояний системы на тормозном и разгонных движениях. При этом каждому положительному состоянию [Ω>0, φ>0, t>0] сопоставляем обратное симметричное состояние [Ω'=-Ω, φ'=φ, t'] с соотношением моментов времени t-t0=t0-t' или t'=2t0-t, t=2t0-t', где t0≡t'r - момент реверса при состоянии [Ω'=0, φ'=φr=φ0,  ]. При этом угловые ускорения повторяются, т.е.
]. При этом угловые ускорения повторяются, т.е.  при φ=φ'. Пусть к начальному мгновению тормозного движения, обозначенному t'5, система получила достаточно большую по модулю кинетическую энергию, большую отрицательную начальную скорость Ω'5<0, а также накопила определенную начальную потенциальную энергию за счет предварительного закручивания торсиона
при φ=φ'. Пусть к начальному мгновению тормозного движения, обозначенному t'5, система получила достаточно большую по модулю кинетическую энергию, большую отрицательную начальную скорость Ω'5<0, а также накопила определенную начальную потенциальную энергию за счет предварительного закручивания торсиона  при предварительном повороте внешней рамки на некоторый угол α>0. Считаем, что замедленное тормозное движение осуществляется в основном за счет расхода кинетической энергии на небольшое трение и на увеличение потенциальной энергии торсиона с отключенным электродвигателем. Ускоренное обратное движение также в основном обеспечено закрученным торсионом, а маломощный электродвигатель выполняет лишь корректирующую функцию со сравнительно малым потреблением электроэнергии и соответственно с весьма малыми омическим потерями энергии в электродвигателе, которыми можно пренебречь или учесть приближенно.
при предварительном повороте внешней рамки на некоторый угол α>0. Считаем, что замедленное тормозное движение осуществляется в основном за счет расхода кинетической энергии на небольшое трение и на увеличение потенциальной энергии торсиона с отключенным электродвигателем. Ускоренное обратное движение также в основном обеспечено закрученным торсионом, а маломощный электродвигатель выполняет лишь корректирующую функцию со сравнительно малым потреблением электроэнергии и соответственно с весьма малыми омическим потерями энергии в электродвигателе, которыми можно пренебречь или учесть приближенно.
Пусть создано и замерено тормозное неуправляемое движение на интервале времени  вплоть до момента реверса
вплоть до момента реверса 
На основании этих замеров с малым шагом времени и последующей аппроксимации получаем кинематическое уравнение тормозного вращения, а также - уравнение изменения угловой скорости

Либо аналогичным образом строится кинематическое уравнение для угла прецессии. Кинематическое движение программного обратного разгонного движения, симметричного по отношению к тормозному движению, выполняется в положительном направлении по программе, задаваемой следующим уравнением, получаемой заменой переменной в функции f(t'):

где  . А также по замерам движения можно вычислить функцию f2 для углового ускорения, получив уравнение
. А также по замерам движения можно вычислить функцию f2 для углового ускорения, получив уравнение

Рассмотрим обратное, разгонное движение системы (Фиг.1), когда тело вместе с внутренней цилиндрической рамкой совершает ускоренное сферическое одностепенное движение с углами поворота Ψ, φ вокруг неподвижной вертикальной оси и подвижной горизонтальной оси, связанными следующим кинематическим равенством

Движение начинается из состояния реверса [Ω0=0,φ0], где φ0=Ψ0/λ и рассматривается до состояния 
Угловая скорость сферического движения имеет две составляющие

Здесь  - орт мгновенной оси вращения OL (Фиг.2), направленный из центра О на точку касания колес планетарной передачи (Фиг.1). За обобщенную координату сферического одностепенного движения примем собственный угол φ, тогда обобщенная скорость есть,
- орт мгновенной оси вращения OL (Фиг.2), направленный из центра О на точку касания колес планетарной передачи (Фиг.1). За обобщенную координату сферического одностепенного движения примем собственный угол φ, тогда обобщенная скорость есть,  , а вектор-строка состояния системы есть [Ω, φ].
, а вектор-строка состояния системы есть [Ω, φ].
Кинетическая энергия сферического движения тела находится по формуле вращения тела вокруг мгновенной оси:
где J - переменный неизвестный момент инерции тела относительно мгновенной оси OL, которая перемещается в теле по круговому конусу вокруг оси Oz в отрицательном направлении (Фиг.1). Кинетическая энергия подвижной системы, состоящей из ротора двигателя, торсиона и карданова подвеса, имеет вид
где I - приведенный к углу φ момент инерции системы, который является постоянным ввиду осевой круговой симметрии внутренней цилиндрической рамки. Подробнее, обозначая I1 - момент внешней рамки и ротора вместе с приведенным моментом инерции торсиона относительно оси Oz1, I2 - момент инерции внутренней рамки относительно мгновенной оси OL, получаем

при I=I1λ2+I2µ2=const.
Отметим, что приведенный к углу поворота Ψ момент инерции торсиона (закручиваемого вала) можно рассчитать по методу Рэлея, он составляет треть его осевого момента инерции.
Окончательно, кинетическая энергия системы устройство - тело имеет следующую структуру

На разгонном двухоборотном программном движении по собственному углу φ отметим одиннадцать равноотстоящих узловых значений угла поворота, они разбивают угловой интервал [0, 4π] на десять равных интервалов:

Отбросим интервал [φ0, φ1), относя его к переходному процессу, нередко исполняемому неточно после реверса, и будем рассматривать движение только на интервале [φ1, φ10]. Угол поворота по собственному углу φ разделим на следующие пять взаимопересекающихся полных оборотов, смещенных один относительно последующего на шаг h=2π/5:

Имеем пять различных пересекающихся разгонных полных оборотов в положительном направлении вида

Отметим, что если процесс реверса исполняется достаточно точно, то можно вместо оборота Ф5 рассматривать оборот Ф0=[φ0, φ5], где φ0=φr - угол поворота при реверсе.
Пяти оборотам (9) разгонного движения сопоставляем пять симметричных тормозных оборотов, выполняемых в обратном порядке в тех же угловых интервалах:

К механической системе, состоящей из тела, подвеса, ротора с торсионом, передаточного механизма, приложены моменты сил торсиона Мtor, электромагнитный крутящий момент Мtur, обобщенный диссипативный момент трения в кинематических парах Мdis вместе с моментом сопротивления среды, которые будем считать приведенными к углу прецессии Ψ, а также гравитационный момент Мgr неуравновешенного тела относительно собственной горизонтальной оси Oz, приведенный к собственному углу φ. Применим теорему об изменении кинетической энергии на каждом разгонном обороте Фi и симметричном тормозном обороте  . Получаем пять пар динамических уравнений
. Получаем пять пар динамических уравнений


Здесь Тi и Тi+5 - кинетические энергии системы в краевых угловых положениях каждого оборота, т.е. при φ=φi и φ=φi+5; Пi и Пi+5 - потенциальные энергии торсиона в этих положениях, Аi и  - работы крутящего момента электродвигателя, выполненные на прямом и обратном оборотах,
- работы крутящего момента электродвигателя, выполненные на прямом и обратном оборотах,  - работы диссипативных сил трения и окружающей среды, причем
- работы диссипативных сил трения и окружающей среды, причем  ввиду динамической симметрии оборотов и предполагаемой динамической симметрии устройства.
ввиду динамической симметрии оборотов и предполагаемой динамической симметрии устройства.
Работы гравитационного момента тела на полных оборотах по собственному углу φ равны нулю, поскольку ось прецессии Оz1 вертикальна и центр масс тела возвращается на прежний вертикальный уровень после полного оборота, не зависящий от угла прецессии.
Вычитая почленно уравнения (12) из (11), получим уравнения, не содержащие диссипативных работ

где Пi,Пi+5 - потенциальные энергии предварительно закрученного торсиона в краевых угловых положениях,  - работы крутящего момента на этапах разгона и торможения.
- работы крутящего момента на этапах разгона и торможения.
Обозначим Еi и  - электроэнергии, потребляемые электродвигателем на i-ом полном обороте фi и обратном обороте
- электроэнергии, потребляемые электродвигателем на i-ом полном обороте фi и обратном обороте  . Эти энергии расходуются на изменение механической энергии системы и на диссипацию энергии через конструктивное трение и сопротивление окружающей среды, а также небольшая часть энергии не поступает в механическую систему - уходит непосредственно на тепловую диссипацию энергии непосредственно из электрической цепи двигателя. Механическую работу электродвигателя находим как разность между потребляемой электродвигателем энергии и омическим расходом определяются формулами
. Эти энергии расходуются на изменение механической энергии системы и на диссипацию энергии через конструктивное трение и сопротивление окружающей среды, а также небольшая часть энергии не поступает в механическую систему - уходит непосредственно на тепловую диссипацию энергии непосредственно из электрической цепи двигателя. Механическую работу электродвигателя находим как разность между потребляемой электродвигателем энергии и омическим расходом определяются формулами

Таким образом, в заявке предлагается замеры активного крутящего момента, приложенного к валу электродвигателя, осуществлять не способом установки тензодатчиков на слабозакручиваемом валу двигателя, а определять через измерение потребляемой двигателем электроэнергии.
На тормозном движении механическое трение в системе выполняет положительную роль - способствует торможению, а на разгонном движении - отрицательную роль, сдерживая движение. В связи с этим сила тока в цепи двигателя на этапе торможения должна быть несколько меньше чем на этапе разгона, отсюда и омические потери энергии на торможении меньше, чем на разгоне, т.е. омическая диссипация не удовлетворяет условию реверсивной симметрии. В случае если механическое трение и сопротивление среды мало и если движение осуществляется в основном за счет начальной кинетической энергии и упругой энергии торсиона, а двигатель обеспечивает лишь корректирующую роль - поддерживает симметричность реверсивного движения, то с достаточной точностью можно полагать  . В общем случае величины εi,
. В общем случае величины εi,  могут быть аналитически оценены или замерены на испытаниях типовых образцов, причем требуется оценивать лишь величины
могут быть аналитически оценены или замерены на испытаниях типовых образцов, причем требуется оценивать лишь величины  - разности омических потерь энергии на разгоне и торможении, поскольку в расчетные формулы входят эти разности. Подставляя выражения (14) в уравнение (13), получим
- разности омических потерь энергии на разгоне и торможении, поскольку в расчетные формулы входят эти разности. Подставляя выражения (14) в уравнение (13), получим

Подставляя выражения (7) в уравнения (15), получим

Здесь Ji≡J(φi) - осевой момент инерции тела относительно положения в теле мгновенной оси вращения тела в начале и конце полного оборота Фi.
Отсюда находим расчетные формулы для определения пяти осевых моментов инерции относительно пяти положений в теле мгновенной оси вращения равномерно распределенных на подвижном аксоиде - круговом конусе с углом раствора 2β=100°, построенным вокруг собственной оси Oz тела и внутренней рамки:

Здесь Ji - момент инерции тела относительно положения в теле мгновенной оси OLi, отклоненной на угол 50° от собственной оси тела - оси внутренней платформы, λ=tg β=tg 50°, µ2=1/cos2 β; Пi и Пi+5 - потенциальные энергии торсиона в начале и конце i-ого полного оборота, Еi и  - энергии, потребляемые двигателем на i-ом обороте при движении в положительном и отрицательном направлениях,
- энергии, потребляемые двигателем на i-ом обороте при движении в положительном и отрицательном направлениях,  - разности омических потерь электроэнергии в цепях двигателя на полных оборотах Фi,
- разности омических потерь электроэнергии в цепях двигателя на полных оборотах Фi,  по углу φ в положительном и отрицательных направлениях, Ωi и Ωi+5 - краевые значения собственной угловой скорости на i - ом обороте, I - приведенный к углу φ момент инерции устройства.
по углу φ в положительном и отрицательных направлениях, Ωi и Ωi+5 - краевые значения собственной угловой скорости на i - ом обороте, I - приведенный к углу φ момент инерции устройства.
Шестой осевой момент инерции находим на полупрограммном реверсивно-симметричном вращательном движении системы вокруг вертикальной оси Oz1 в любой выбранной угловой зоне {Ψ∈[Ψ1,Ψ2]}, например {Ψ∈[0,π]} при закрепленном собственном угле поворота φ, например при φ=const=φ0. По аналогии с формулой (15) получаем для такого осевого вращательного движения расчетную формулу
2Т2-2Т1=2(П1-П2)+Е-Е'-δ6
при
П1 и П2 - краевые значения потенциальной энергии торсиона, (Е-Е') - разность расходов электроэнергии на разгонном и тормозном движении, δ - разность омических потерь энергии в цепи двигателя  при ε>ε'≥0. Отсюда получаем расчетную формулу
при ε>ε'≥0. Отсюда получаем расчетную формулу

где  - краевые угловые скорости на выбранном конечном угле поворота [Ψ1, Ψ2].
- краевые угловые скорости на выбранном конечном угле поворота [Ψ1, Ψ2].
По формуле (18) определяем момент инерции тела относительно оси прецессии, перпендикулярной собственной оси тела (оси внутренней рамки) при выбранном и зафиксированном собственном угле φ. А также по этой формуле можно найти момент инерции I устройства на эксперименте с ненагруженным устройством, при котором имеем J6=0. При нагрузке эталонным телом с известным моментом инерции  находим из (18):
находим из (18):

Итак, осевые моменты инерции тела определяются по замерам угловой скорости реверсивной прецессии, или угловой скорости собственного вращения, полупрограммного одностепенного сферического симметричного движения и осевого движения вокруг вертикальной оси и замеров потребляемой двигателем энергии за вычетом разности омических потерь энергии на разгонном и тормозном движениях с учетом известных узловых значений потенциальной энергии торсиона. В частном случае, когда диссипация энергии в системе через конструктивное трение и сопротивление среды мала и движение в основном определяется упругим моментом торсиона и начальной кинетической энергией, полученной перед испытанием, а электродвигатель выполняет лишь корректирующую роль компенсации трения на разгонном движении, то омической потерей энергии можно пренебречь. В общем случае омические потери энергии вычисляются по известным формулам или могут быть оценены на экспериментах с эталонными телами. Таким образом, в предлагаемом способе в качестве измерительных приборов используются датчики тока вместо тензодатчиков, неточно определяющих активный момент по весьма малым угловым деформациям ведущего вала.
Выразим элементы матрицы тензора инерции через шесть осевых моментов инерции тела, относительно осей, показанных на Фиг.3.
При следующих значениях параметров
α=50°, β=72°, r=sinα, h=cosα
векторы - строки ортов осей имеют вид
e1=[r, 0, h], e2=[rcosβ, rsinβ, h]
ei=[rcos((i-1)β), rsin((i-1)β),h], i=1,…,5
e6=[1, 0, 0]
Ведем шестиэлементные векторы-столбцы квадратов и удвоенных произведений направляющих косинусов - проекций ортов

Квадратная матрица направляющих косинусов шестого порядка определяется в результате горизонтальной конкатенации векторов столбцов по формуле

Численное значение этой матрицы
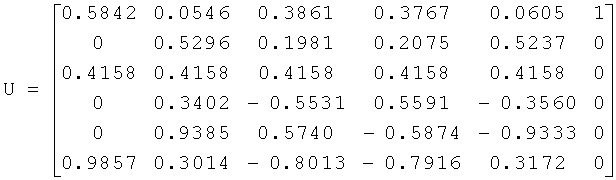
Определитель этой матрицы существенно отличен от нуля, близок к единице:
det(U)=0.9634
Отметим, что определитель для пучка осей Гернета М.М. равен единице, а для осей икосаэдра, оптимально распределенных в пространстве, определитель равен 2.29.
Угол раствора аксоида δ=50°, а двойной угол при вершине конуса 2δ=100° выбран из условия, чтобы шестая ось вращения была достаточно удалена от пяти осей, расположенных на конусе, этим обеспечивается требуемое достаточно большое значение определителя, близкое к единице. Расположение шестой оси определено перпендикулярным к оси собственного вращения с целью упрощения конструкции исполнительного устройства. Отметим, что можно допустить небольшие отклонения δ=50°±2°. Упрощение конструкции объясняется тем, что шестой момент инерции тела находится на вращении вокруг неподвижной оси внешней рамки при остановленном вращении внутренней рамки, в то время как в прототипе останавливают внешнюю рамку и специальным передаточным механизмом передают вращение вала двигателя непосредственно на внутреннюю рамку.
Момент инерции тела относительно любой из шести осей OLi можно выразить через осевые и центробежные моменты инерции и направляющие косинусы оси еi,x, еi,y, еi,z по известной формуле:

где в центробежные моменты инерции включен знак минус, т.е. принято:

Отсюда находится матричная формула для вычисления элементов тензора инерции:

Тензор инерции рассчитывается по формулам (17)-(21).
Устройство работает следующим образом: внутренняя рамка 6 карданова подвеса с закрепленным в ней телом выполняет полупрограммное неравномерное двухосное сферическое движение вокруг неподвижной точки О, состоящее из любого удобного для исполнения гибридным двигателем тормозного движения и обратного программного движения по программе, рассчитанной по замерам исполненного тормозного движения. При этом данное реверсивно-симметричное сферическое движение состоит из прецессионного вращения внешней рамки 5 вокруг вертикальной оси Oz1 и синхронного с ним двухоборотного вращения внутренней рамки вокруг оси Oz. Синхронность программного вращения обеспечена гибридным двигателем, состоящим из электродвигателя 2 и торсиона 4 вместе с планетарным зубчатым механизмом 9, 10. Текущее измерение угла поворота и угловой скорости осуществляет датчик угол - код на роторе двигателя 2, аналитическую обработку результатов выполняет компьютер. После исполнения сферического движения выключается собственное вращение внутренней рамки 6 посредством стопорной муфты 8 с одновременным отключением передаточного механизма посредством продольного перемещения колеса 10, выполняемого муфтой 11. В результате сферическое движение тела переходит во вращательное движение вокруг вертикальной неподвижной оси Оz1. Оно исполняется в форме программного реверсивно-симметричного тормозного-разгонного прецессионного вращения вокруг оси, создаваемое внешней рамкой 1 вместе с электродвигателем 8 и собственного вращения рамки вокруг оси, создаваемого электроприводом. При этом датчиком 9 производится непосредственное измерение угла поворота и угловой скорости вращения ротора электродвигателя. Управление движением осуществляется автоматической системой программного управления. Электромуфта 5 на одном этапе фиксирует на валу 4 левое коническое зубчатое колесо, отпуская при этом правое коническое колесо, а на другом этапе наоборот - фиксирует на валу правое коническое колесо и отпускает левое колесо, этим достигается изменение коэффициента пропорциональности, связывающего прецессионное и собственное вращения платформы 2. В результате устройство обеспечивает телу требуемое программное сферическое движение.
Таким образом, предлагаемое изобретение позволяет решить задачу повышения производительности, точности, расширения области применения в машиностроении. Это достигается посредством применения полупрограммных движений, применения гибридного двигателя, цилиндрической рамки, упрощенного передаточного механизма, а также посредством замены пяти испытаний одним универсальным испытанием, в котором используется сферическое движение тела.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ И КООРДИНАТ ЦЕНТРА МАСС ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2348020C1 |
| Способ идентификации тензора присоединенных моментов инерции тела и устройство для его осуществления | 2018 |
|
RU2688964C1 |
| Способ идентификации присоединенного момента инерции тела и устройство для его осуществления | 2016 |
|
RU2627023C1 |
| Способ идентификации гидродинамических параметров тела | 2018 |
|
RU2706909C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА | 2002 |
|
RU2262678C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2200940C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА | 2014 |
|
RU2575184C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСЕВОГО МОМЕНТА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2115904C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2112227C1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
Изобретение относится к машиностроению. Сущность: платформе сообщают одно реверсивно-симметричное сферическое вращение вокруг неподвижной точки. Замеряют разности работ активных моментов сил через разности потребляемой электроэнергии на пяти собственных полных оборотах, отсчитываемых от пяти равноотстоящих значений собственного угла. Аналитически, с применением уравнения изменения энергии, использования пяти рубежных положений и модулей вектора угловой скорости, определяют моменты инерции относительно пяти осей, шестой осевой момент инерции определяют на реверсивно-симметричном вращательном движении вокруг вертикальной оси прецессии при фиксированном угле собственного вращения. Устройство содержит двухосный карданов подвес, имеющий внешнюю рамку с валом и внутреннюю рамку-платформу с валом с возможностью размещения в ней тела, автоматизированный электропривод в виде электродвигателя и зубчатого передаточного механизма с переключающими муфтами. Внутренняя рамка выполнена в виде полого осесимметричного цилиндра. Электродвигатель содержит упругий элемент в виде закручиваемого торсиона, составляющего с ним гибридный двигатель. Передаточный зубчатый механизм состоит из конического колеса, сцепленного с цилиндром, соосного с внутренним валом, и неподвижного конического колеса, соосного с внешней рамкой, с возможностью отключения его электромуфтами посредством продольного перемещения с одновременным отключением вращения внутренней рамки. Технический результат: повышение производительности, точности, расширение области применения на системах программного управления. 2 н.п. ф-лы, 3 ил.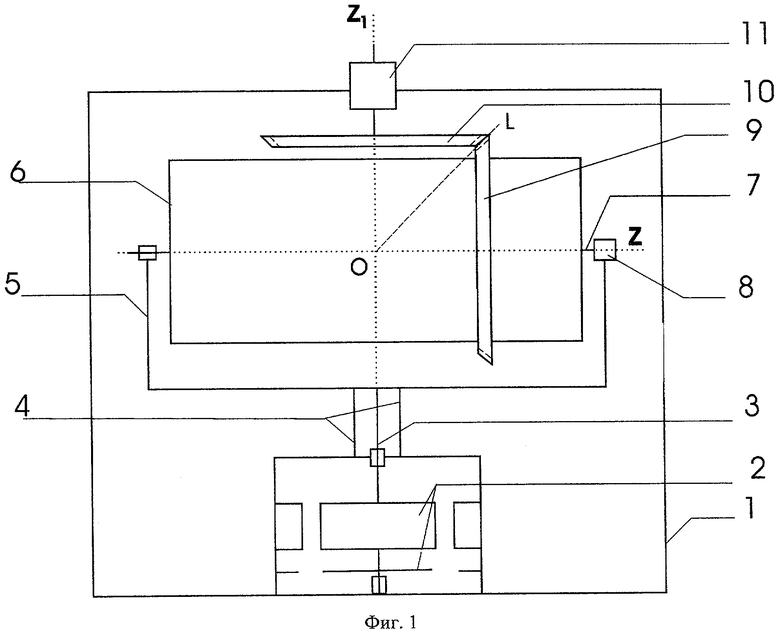
1. Способ определения тензора инерции, заключающийся в том, что платформе с закрепленным на ней телом в условиях неизвестных трения, сопротивления среды и положения центра масс сообщают активным моментом сил симметричное разгонно-тормозное вращение, отсчитываемое от произвольно выбранного углового положения, содержащее тормозной оборот с постепенно убывающей величиной угловой скорости и полный разгонный оборот в обратном направлении, повторяющий в обратном порядке тормозной оборот с угловой скоростью противоположного знака, с допускаемым переходным процессом между оборотами, замеряют разности работ активного момента на множестве угловых положений, по которым аналитически с применением уравнений энергий, определяют осевой момент инерции тела, и по моментам инерции относительно шести различных осей, пересекающихся в точке определяют тензор инерции в точке, отличающийся тем, что платформе сообщают одно реверсивно-симметричное сферическое вращение вокруг неподвижной точки, объединяющее вращение вокруг неподвижных осей, состоящее из реверсивно-симметричного прецессионного вращения вокруг вертикальной оси и прямо пропорциональное ему синхронное собственное вращение в двухоборотном угловом интервале вокруг горизонтальной подвижной собственной оси, реверсивно-симметричное к тормозному вращению с последующим отключением собственного вращения при сохраняемом прецессионном вращении, замеряют разности работ активных моментов сил через разности потребляемой электроэнергии на пяти собственных полных оборотах, отсчитываемых от пяти равноотстоящих значений собственного угла, по которым аналитически, с применением уравнения изменения энергии, использования пяти рубежных положений и модулей вектора угловой скорости, определяют моменты инерции относительно пяти осей, шестой осевой момент инерции определяют на реверсивно-симметричном вращательном движении вокруг вертикальной оси прецессии при фиксированном угле собственного вращения.
2. Устройство для определения тензора инерции тела, содержащее двухосный карданов подвес, имеющий внешнюю рамку с валом и внутреннюю рамку-платформу с валом с возможностью размещения в ней тела, автоматизированного электропривода в виде электродвигателя и зубчатого передаточного механизма с переключающими муфтами, отличающееся тем, что внутренняя рамка выполнена в виде полого осесимметричного цилиндра, и электродвигатель содержит упругий элемент в виде закручиваемого торсиона, составляющего с ним гибридный двигатель, а передаточный зубчатый механизм состоит из конического колеса, сцепленного с цилиндром, соосного с внутренним валом, и неподвижного конического колеса, соосного с внешней рамкой с возможностью отключения его электромуфтами посредством продольного перемещения с одновременным отключением вращения внутренней рамки.
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2200940C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА | 2002 |
|
RU2262678C2 |
| Устройство для определения тензора инерции | 1984 |
|
SU1262318A1 |
| JP 2000111436 A, 21.04.2000. | |||

