Изобретение относится к машиностроению, в частности к управлению приводом машины.
Известный способ управления электрогидромеханическим приводом, реализованный в гидромеханической передаче, в которой второй дифференциальный механизм снабжен вторым двигателем и его боковое звено соединено с второй объемной гидравлической машиной, причем обе гидравлические машины связаны между собой (авт. св. СССР N 612084, кл. F 16 H 47/04, 1976).
Недостатком этого способа является то, что он не учитывает закона изменения приводного вала машины, зависящего от геометрических, массовых, кинематических характеристик машины в целом, а также от механической характеристики выполняемой операции технологического процесса. В связи с этим известный способ не связывает регулируемые параметры привода машины (закон изменения приводного момента, скорости, мощности) с законом изменения силы технологического сопротивления, ее мощности и скорости рабочего органа.
Цель изобретения - повышение точности и надежности за счет снижения динамических нагрузок.
Для машин с одной степенью подвижности управляющая программа по силе (крутящему моменту) может быть представлена в виде
M , (1) где Mпд - приведенный крутящий момент на валу приводного двигателя;
, (1) где Mпд - приведенный крутящий момент на валу приводного двигателя;
ω′= d ω/d ϕ- аналог углового обобщенного ускорения;
Jп′= dJп/d ϕ- производная от приведенного момента по ϕ.
Управление (1) определяет закон изменения крутящего момента на валу приводного двигателя в случае, если задан закон изменения его угловой скорости ωв функции обобщенной координаты ϕ. При этом закон изменения ωдолжен учитывать взаимосвязь между массово-геометрическими характеристиками передаточных и исполнительных механизмов машины. Эта взаимосвязь может быть выявлена следующим образом. Предположим, что Мпд= Мпс - это означает, что крутящий момент на валу двигателя изменяется по закону, являющему зеркальным отражением закона Мпс, т. е. Мпд компенсирует только момент от сил сопротивления Мпс. В этом случае скорость ωвала приводного двигателя определяется из выражения
Jп·ω·ω1+J = 0. (2)
= 0. (2)
Преобразование уравнения (2) дает возможность выразить зависимость между ωи массово-геометрическими характеристиками машины следующим образом
ωJпω1= -J .
.
Разделив левую и правую части последнего уравнения на J, получим
Jп·ω1= -J
или
J =
=  ·
·  .
.
Предположив, что в дальнейшем каждому значению ϕ будет соответствовать значения Jп и ω, умножим левую и правую части последнего уравнения на d ϕ, получим
Jпdω = -  dJп
dJп
или = -
= - 
 .
.
Интегрирование левой и правой частей уравнения дает
lп
 = lп
= lп или
или  =
=  , (3) где ωϕи Jпϕ- значения ωи Jп, соответствующие некоторому определенному углу ϕ.
, (3) где ωϕи Jпϕ- значения ωи Jп, соответствующие некоторому определенному углу ϕ.
Из уравнения (3) получаем
ω = ωϕ . (4)
. (4)
Уравнение (4) имеет следующий физический смысл. Если умножить левую и правую часть этого уравнения на 1/2 и возвести в квадрат, получим ω2=
ω2=  ω
ω
или =
=  .
.
Последнее равенство - выражение, определяющее равенство кинетической энергии системы при различных ϕ и соответствующее этим углам ω и Jп при равенстве Мпд и Мпс. Другими словами, кинетическая энергия (Jпϕ ωϕ2)/2 в каком-то фиксированном значении ϕостается неизменной для любых значений текущих ϕ.
При переменной величине Jп= f( ϕ) уравнение (4) указывает на неравномерность вращения главного приводного вала, обусловленную "внутренней динамикой" машины, т. е. массово-геометрическими характеристиками ее исполнительных и передаточных механизмов. Таким образом, уравнение (4) описывает закон изменения обобщенной скорости машины, присущий ей и неизменный при отсутствии движущих сил, сопротивления, трения и др. В связи с этим управление переходными процессами (разгон, торможение) требует не только выбора (назначения) закона изменения обобщенной скорости от начального до конечного значений, но и учета указанной закономерности, так как наличие "собственной" скорости машины, описанной выражением (4), в значительной степени влияет на динамическую нагруженность вала приводного двигателя, в данном случае гидродвигателя. Таким образом ω, входящая в уравнение (1), должна быть представлена в виде (с учетом уравнения (4)
ω = ωзад+ωϕ . (5)
. (5)
Напряжение, подаваемое на корректирующий электродвигатель постоянного тока, в электрогидромеханическом приводе машины определяется из равенства мощностей, которое имеет вид
UI = Pгидравл= M
или
UI = Q·η·ΔP= M
ΔP =  , (6) где Мпд - приведенный крутящий момент на валу гидродвигателя, определяемый по выражению (1);
, (6) где Мпд - приведенный крутящий момент на валу гидродвигателя, определяемый по выражению (1);
ω- скорость вращения вала гидродвигателя, определяемая по выражению (5);
Q - идеальный расход жидкости через гидродвигатель за один оборот; η- общий КПД гидродвигателя.
С учетом зависимости (6) значение подаваемого напряжения на корректирующий электродвигатель определяется выражением
U =  , где U - напряжение, подаваемое на электродвигатель;
, где U - напряжение, подаваемое на электродвигатель;
I - ток, потребляемый двигателем.
Таким образом, закон изменения напряжения, подаваемого на двигатель постоянного тока, учитывает динамические характеристики машины, в частности изменения приведенного момента инерции, при использовании в ней механизмов с переменным передаточным отношением и динамические характеристики гидропри- вода.
Машина, на примере которой объясняется сущность способа управления, представлена на фиг. 1, где приведена схема машины с электрогидромеханическим приводом, включающим исполнительный механизм (кривошипно-ползунный) с подвижными звеньями: кривошип 1, шатун 2, ползун 3, регулируемый гидродвигатель 4 и регулируемый насос 5 гидрообъемной передачи 6. Гидродвигатель 4 связан с кривошипом 1, а насосу 5 передается вращение от двигателя 7 через дифференциальный механизм 8. С насосом 5 связан также корректирующий электродвигатель 9, через дифференциальный механизм 8.
Взаимосвязь силовых, скоростных и массово-геометрических характеристик машины может быть выражена уравнением:
M . (7)
. (7)
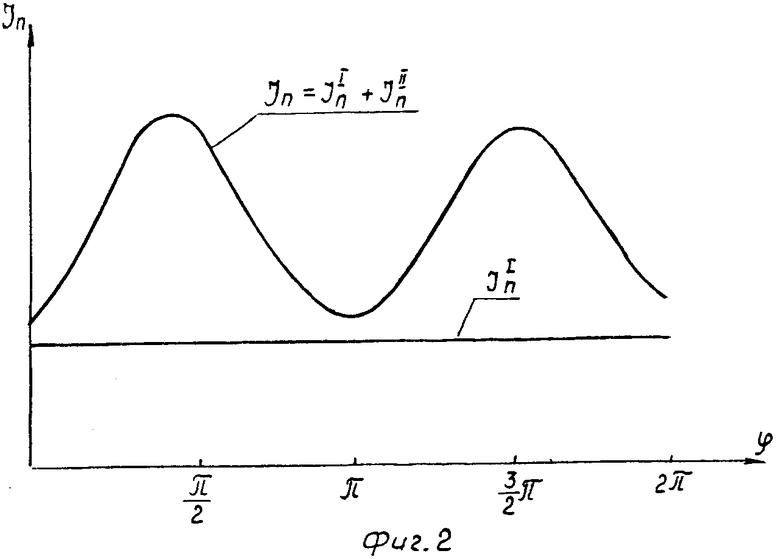
В уравнении (7) принято Мпс= 0, JпI= const и определяет кинетическую энергию всех масс подвижных звеньев механизмов машины, имеющих постоянное передаточное отношение; JпII учитывает изменение кинетической энергии подвижных звеньев механизмов машины и является функцией обобщенной координаты ϕ, т. е. J
Для рассматриваемого примера значение приведенного момента инерции, определяемое из равенства кинетических энергий, имеет вид
Jп= J
 +
+  Σ T
Σ T
 +J
+J
 +
+
+ Jг.п.+m
 +m
+m = J
= J
J
 +
+ 
 T
T
J (
( )
) +m2[(x
+m2[(x )2+(y
)2+(y )2] +m3(x
)2] +m3(x )2;
)2;
Jг.п. - момент инерции подвижных звеньев гидропередачи;
Jдв - момент инерции движущихся частей основного двигателя;
Jр.эл - момент инерции ротора корректирующего электродвигателя;
Тiдиф.мех - кинетическая энергия i-го элемента дифференциального механизма.
Индексы в приведенных уравнениях соответствуют обозначениям звеньев на фиг. 1.
В последнем уравнении
ϕ
 =
=  .
.
Аналогично
x =
=  .
.
Используя аналогичные преобразования, имеем =
=  x
x +
+ y
y .
.
Производная Jп по обобщенной координате имеет вид = 2J
= 2J +2m
+2m x
x x
x +y
+y y
y +2m3x
+2m3x
Как видно, уравнения (8) и (9) есть функции обобщенной координаты и отображают внутреннюю динамику машины (фиг. 1)
Графики функции JпI и Jп = JпI + JпII представлены на фиг. 2.
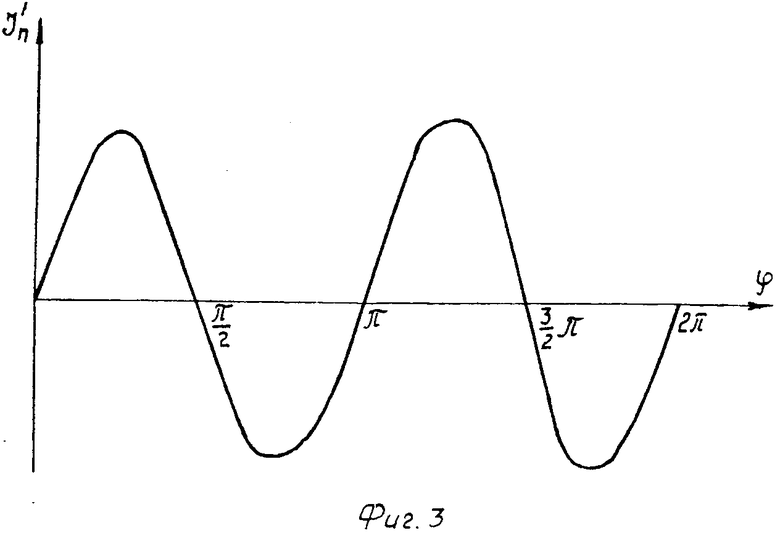
На фиг. 3 изображен график зависимости Jп′ от ϕ.
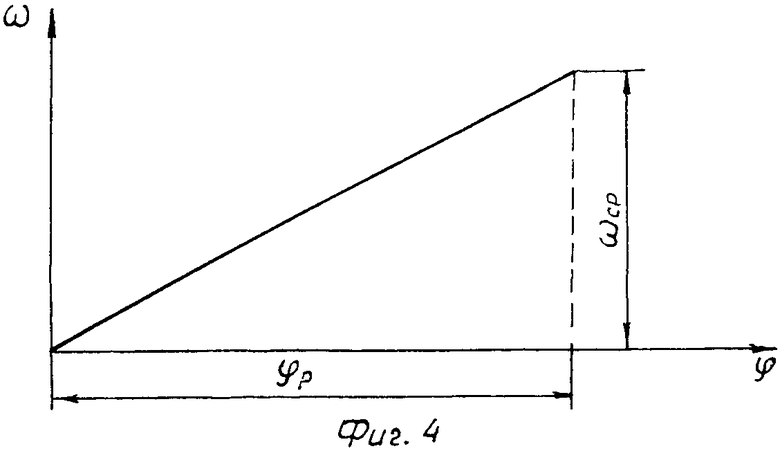
Пусть требуется разогнать машину, изменив ее обобщенную скорость от нуля до ωср (средняя скорость установившегося движения) по линейному закону
ω =  ϕ, (10) где ϕр - угол разгона (угол за который происходит изменение от нуля до ωср).
ϕ, (10) где ϕр - угол разгона (угол за который происходит изменение от нуля до ωср).
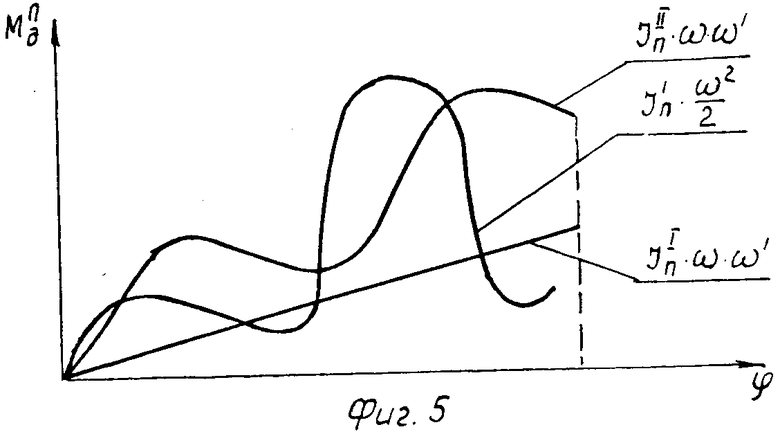
Зависимость (10), представленная на фиг. 4, позволяет построить зависимость отдельных составляющих формулы (7), которые дают возможность видеть раздельное влияние массово-геометрических и кинематических характеристик машины на динамическую нагруженность приводного вала.
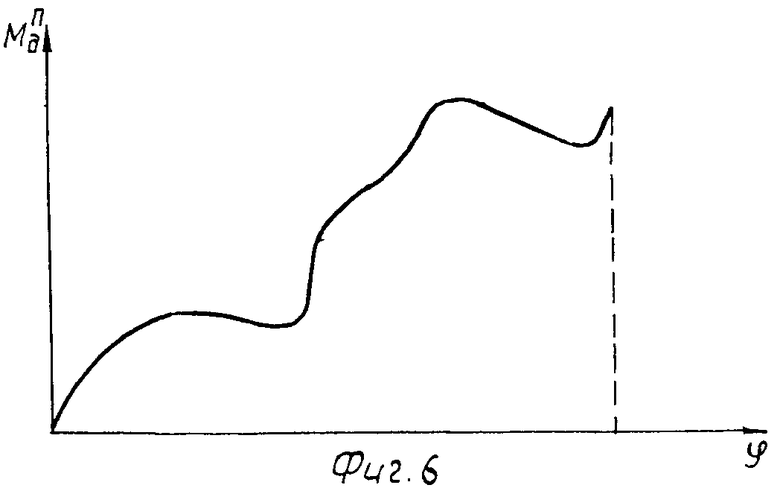
На фиг. 5 показаны графики зависимости отдельных составляющих, входящих в уравнение (7), на фиг. 6 - зависимость Мпд от ϕ, т. е. сумма составляющих, изображенных на фиг. 6, за время разгона по закону, соответствующему выражению (10). Из фиг. 5 видно, что наибольшее влияние на неравномерность движения оказывают функции JпII(ϕ) и JпII (ϕ).
Рассматриваемый пример указывает на то, что закон изменения скорости в процессе разгона должен выбираться с учетом функций Jп и Jпlтаким образом, чтобы значение крутящего момента на приводном валу машины не выходило за пределы некоторых значений Mдпmax и Mдпmin. При этом выбор закона изменения ωв функции ϕдолжен учитывать массово-геометрические характеристики исполнительных и передаточных механизмов машины. Это сводится к тому, чтобы увеличение (уменьшение) значений Мпд, обусловленное изменением Jп и Jпl, компенсировалось уменьшением (увеличением) Мдп за счет изменения ωи ωl.
Закон изменения скорости определяется уравнениями управления (3) и (8) и может быть представлен в виде
ω =  +ωϕ
+ωϕ . (11)
. (11)
Выражение (11) учитывает, с одной стороны, рост скорости по закону, определенному зависимостью (10), а с другой стороны, необходимость изменения скорости в процессе разгона по закону, определенному уравнением (7).
Преимущества такого закона изменения скорости видны из следующих соображений. Как видно из уравнения (7) и графиков (фиг. 5) первая составляющая Mпд(Jп′˙ω˙ω′)представляет собой уравнение прямой в случае, если ωизменяется по закону, соответствующему формуле (10). В случае же если скорость изменяется по закону, описанному уравнением (11), первая составляющая уравнения (7) Мпд будет переменной. Изменяются также вторая и третья составляющие Мпд (см. уравнение 7). При этом суммарное значение Мпд будет составлять другую функцию в сравнении с фиг. 6.
Предлагаемый способ программного управления дает возможность определить значения крутящего момента на приводном валу машины по формуле (1) с учетом (11). Это дает возможность определить допустимые Мпд и выбрать тем самым величину ϕр, в пределах которой значения Мпдостаются в требуемых диапазонах. Выбор ϕр связан с временем разгона, т. е. производительностью машины. Время разгона может быть определено
tp= 
 . (12)
. (12)
В выражении (12) значение ωвыбирается из выражения (11).
Предлагаемый способ управления электрогидромеханическим приводом машины может быть реализован с помощью системы управления, включающей вычислительное устройство.
На фиг. 7 дана структурная схема системы управления, реализующая описанный способ управления электрогидромеханическим приводом машины. Система управления состоит из вычислителя 1, регулятора 2, корректирующего двигателя 3 постоянного тока, связанного с регулируемым насосом через дифференциальный механизм (дифференциальный механизм и основной привод насоса не показаны), гидродвигателя 4, датчика 5 угла поворота главного приводного вала Д 1, датчика 6 крутящего момента на главном приводном валу Д 2, датчика 7 перепада давления на гидродвигателе Д3, источник 8 постоянного напряжения 8, пульт управления 9.
Вычислитель 1 на основании сигналов с датчиков Д1 и Д2 формируют сигнал Uз, пропорциональный величине напряжения, подаваемого от источника 8 постоянного напряжения через регулятор 2 на корректирующий двигатель 3 постоянного тока
Uз= KUз, где Uз - сигнал управления, вырабатываемый вычислителем 1;
К - коэффициент пропорциональности (усиления);
Uз - напряжение, подаваемое на корректирующий двигатель 3.
Датчики Д1 5 и Д2 6 механически связаны с главным приводным валом машины и вырабатывают сигналы, пропорциональные углу поворота и крутящему моменту соответственно. Датчик Д3 7 связан с напорной и сливной магистралями гидродвигателя 4 главного приводного вала машины и вырабатывает сигнал, пропорциональный перепаду давления на гидродвигателе. Пуль управления 9 предназначен для включения-отключения привода машины.
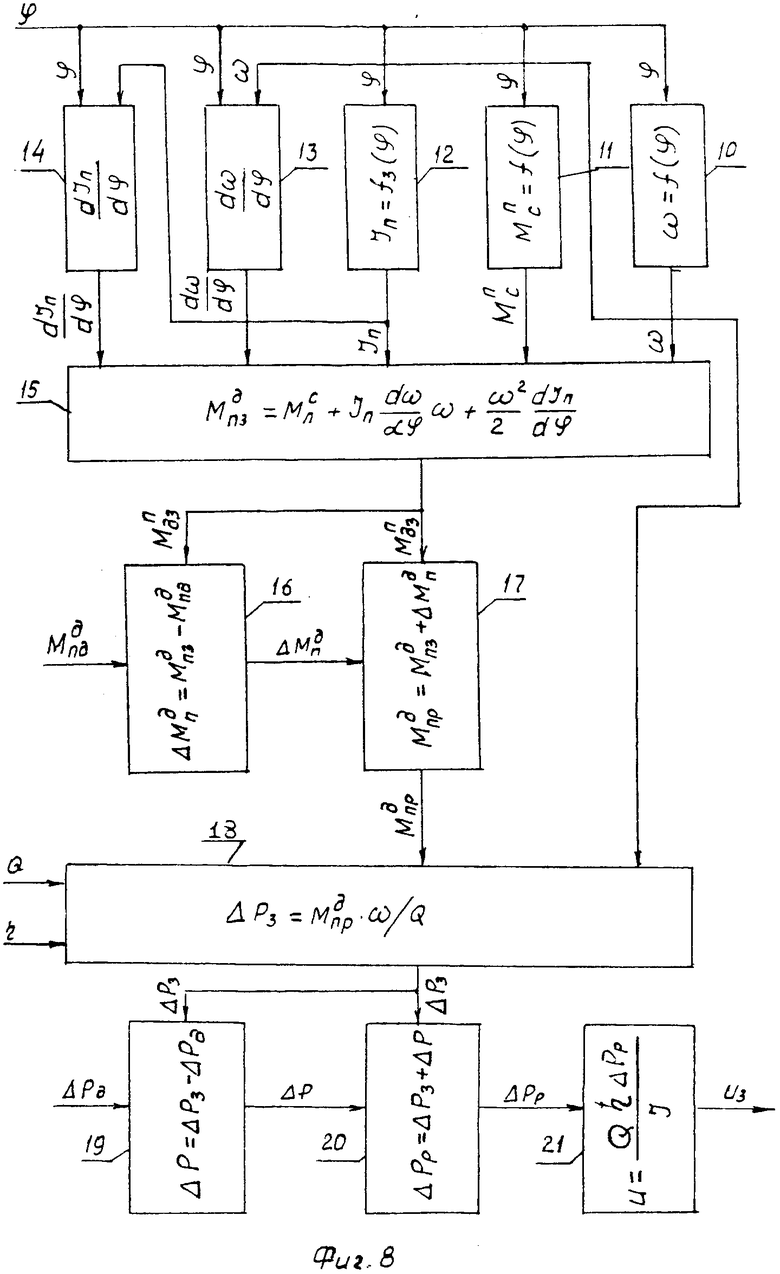
На фиг. 8 дана структурная схема вычислителя 1.
В блоке 10 вычисляется значение угловой скорости ωпо формуле (9), т. е.
ω = f1(ϕ) =  +ωϕ
+ωϕ .
.
В блоке 11 вычисляется значение приведенного момента сопротивления Мпс как функция угла поворота ϕприводного вала машины. Эта зависимость является заданной для каждой технологической операции.
В блоке 12 вычисляется значение приведенного момента инерции
Jп= J
В блоках 10-12 вычисления величин производится на основании сигнала с датчика угла поворота Д1 5 главного приводного вала машины.
В блоках 13 и 14 вычисляются соответственно производные от угловой скорости ω, вычисленной в блоке 10, и приведенного момента инерции, вычисленного в блоке 12, по углу поворота главного приводного вала машины ϕ.
В блоке 15 вычисляется значение заданного приведенного движущего момента инерции Мдпз по формуле
M ω +
ω +  , где все составляющие правую часть этого уравнения есть значения, вычисленные в блоках 10-14.
, где все составляющие правую часть этого уравнения есть значения, вычисленные в блоках 10-14.
Вычисленная величина Мдпз в блоке 16 сравнивается с сигналом, поступающим с датчика Д2 6 действительного момента на приведенном валу машины Мдпд, находится их разность ΔМпд
ΔM
В блоке 17 вычисляется расчетное значение приведенного момента
M
В блоке 18 вычисляется значение заданного перепада давления на гидродвигателе по формуле
ΔPз= M
Q - идеальный расход жидкости через гидродвигатель за один оборот;
η- общий КПД гидродвигателя.
Вычисленная величина ΔРз в блоке 19 сравнивается с сигналом, поступающим с датчика Д3 7 действительного перепада давления на гидродвигатель ΔРд, и находится их разность
ΔР= Δ Рз-Δ Рд.
В блоке 20 вычисляется расчетное значение перепада давления
ΔРр= ΔРз+Δ Р.
И затем в блоке 21 вычисляется значение Uз управляющего сигнала
Uз=  .
.
Система управления электрогидромеханическим приводом машины работает следующим образом.
В начальном положении система управления обесточена, т. е. напряжение Uпит и Uпост равны нулю. Двигатель 3 не вращается. С пульта управления 9 включается источник 8 постоянного напряжения. На вычислитель 1 приходит питающее напряжение. Сигнал с датчика Д1 5 поступает в вычислитель 1. На основании этого сигнала в вычислителе 1 определяется значение Мдпз. В том случае, если ϕнач= 0
ω = ωср . Если ϕнач ≠0
. Если ϕнач ≠0
ω =  ϕнач+ωϕ
ϕнач+ωϕ . т. е. в любом случае ω, вычисленное в блоке 10, не равно нулю.
. т. е. в любом случае ω, вычисленное в блоке 10, не равно нулю.
Значение вычислительного Мдпз сравнивается со значением Мдпд, поступающим в виде сигнала с датчика Д2 6. В начальный момент Мдпд= 0 поэтому ΔМпд= Мдпз.
По значению ω, полученному в блоке 10, и полученному в блоке 17 значению ΔМдпр определяется значение заданного перепада давления на гидродвигателя ΔРз, которое сравнивается с ΔРд, поступающим в виде сигнала с датчика Д3 7. В начальный момент ΔРд ≠0, т. к. работает основной привод насоса, поэтому имеется их разность ΔР= ΔРз- ΔРд, которая позволяет получить расчетное значение перепада давления ΔРр= ΔРз+ ΔР.
В связи с этим на выходе вычислителя в начальный момент появляется сигнал
Uз=  .
.
Этот сигнал поступает на вход регулятора 2, который непосредственно управляет напряжением Uз, подаваемым на корректирующий двигатель 3. Таким образом в начальный момент на двигатель 3 подается напряжение
Uз.нач= К ˙Uз.нач, которое заставляет двигатель вращаться. Вращение от корректирующего двигателя 3 через дифференциальный механизм передается к насосу, что приводит к изменению характеристик на гидродвигателе, и соответственно к изменению сигналов с датчиков Д1 5, Д2 6, Д3 7. Эти сигналы поступают в вычислитель 1, который вырабатывает новое значение Uз, соответствующее сигналам с датчиков.
Обратная связь по крутящему моменту позволяет стабилизировать действительный приведенный крутящий момент Мдпд на уровне заданного Мдпз.
Использование данного способа управления приводом машины обеспечивает уменьшение динамической нагруженности на главный приводной вал машины, позволяет снизить энергоемкость и металлоемкость проектируемых машин, повысить точность и надежность привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРИВОДОМ ПОСТУПАТЕЛЬНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2106950C1 |
| СПОСОБ ПОВЫШЕНИЯ ДОЛГОВЕЧНОСТИ ДЕТАЛЕЙ ПОДВИЖНЫХ СОЕДИНЕНИЙ МЕХАНИЗМОВ МАШИН | 1992 |
|
RU2107902C1 |
| ДВУХСКОРОСТНОЙ МЕХАНИЗМ ПРИВОДА ЗАДНЕГО ВАЛА ОТБОРА МОЩНОСТИ УНИВЕРСАЛЬНО-ПРОПАШНОГО ТРАКТОРА | 1991 |
|
RU2025306C1 |
| УСТРОЙСТВО ЗАЩИТЫ ЭЛЕКТРОПРИВОДА ПЕРЕМЕННОГО ТОКА | 1991 |
|
RU2012973C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРЫ УДАРНО-СЖАТОГО ГАЗА ПРИ СВАРКЕ ВЗРЫВОМ | 1990 |
|
RU2009454C1 |
| УСТРОЙСТВО ЗАЩИТЫ ЭЛЕКТРОПРИВОДА ПЕРЕМЕННОГО ТОКА | 1991 |
|
RU2012972C1 |
| СПОСОБ УРАВНОВЕШИВАНИЯ ВРАЩАЮЩЕГОСЯ ЭЛЕМЕНТА МАШИНЫ, СВЯЗАННОГО С ЕЕ РАБОЧИМ ОРГАНОМ | 1989 |
|
RU2010132C1 |
| СПОСОБ ПРОГРАММИРОВАНИЯ РЕКОНФИГУРИРУЕМОГО МАНИПУЛЯТОРА | 1991 |
|
RU2043914C1 |
| КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2011557C1 |
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2076451C1 |
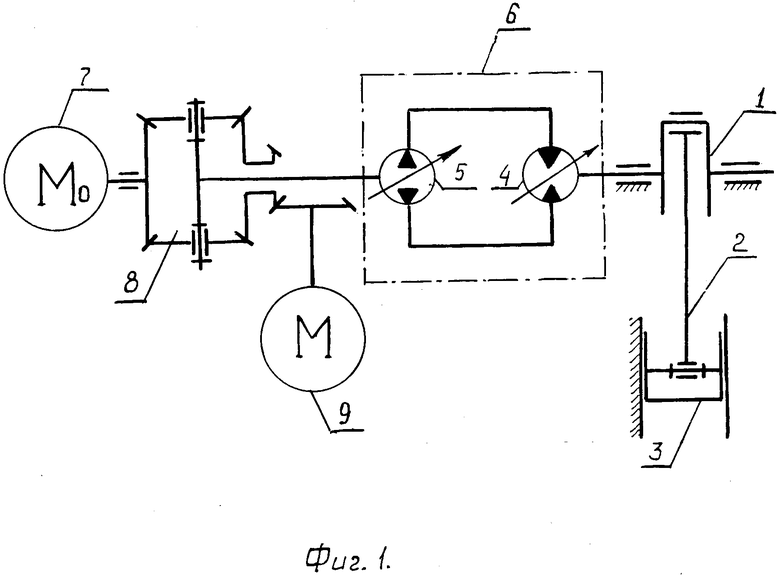
Использование: в гидроавтоматике, в частности в приводах строительных, дорожных и сельскохозяйственных машин. Сущность: сигнал с датчика 5 поступает в вычислитель 1, в котором определяется значение заданного приведенного крутящего момента, которое сравнивается со значением сигнала датчика 6. По значению угловой скорости вала гидродвигателя 4 и значению приведенного крутящего момента на валу гидродвигателя 4 определяется значение заданного перепада давления на гидродвигателе 4, которое сравнивается с значением сигнала датчика 7. На выходе вычислителя 1 формируется сигнал, который непосредственно управляет напряжением постоянного тока, которое подается на электродвигатель пульт управления 9. Вращение последнего через дифференциальный редуктор 8 передается насосу. В дальнейшем при изменении сигналов датчиков 5 - 7 изменяется напряжение, подаваемое на электродвигатель 9. 1 з. п. ф-лы, 8 ил.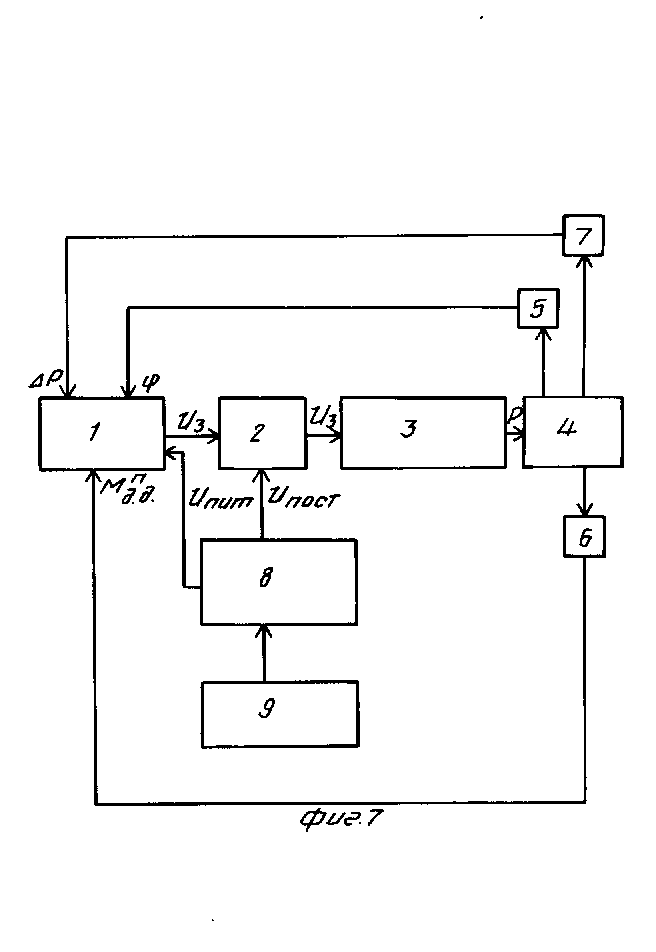
U =  , ,
, ,
где Q - идеальный удельный объем гидродвигателя;
η - общий КПД гидродвигателя;
I - сила постоянного тока;
ΔPpасч - расчетное значение перепада давления, определяемое из соотношения
ΔPрасч =  , ,
, ,
где Mпд - приведенный крутящий момент на валу гидродвигателя, определяемый из соотношения
M +
+ 
 , ,
, ,
где Mпс - приведенный момент сопротивления;
Jп - приведенный момент инерции;
ϕ - угол поворота вала гидродвигателя;
ω - расчетная частота вращения вала гидродвигателя, определяемая из соотношения
ω = ωзад+ ω4 , ,
, ,
где ωϕ , Jпϕ - частота вращения и приведенный момент инерции, определяемые углом ϕ поворота вала гидродвигателя.
