Изобретение относится к области контроля емкостей, в частности, стеклянных емкостей и, в частности, к контролю плоскостности поверхности кольца таких емкостей.
Поверхность кольца является верхней поверхностью или верхней кромкой кольца емкости. С учетом своей кольцевой формы вокруг теоретической центральной оси кольца поверхность кольца является более или менее толстой в направлении, радиальном к теоретической центральной оси. В теории эта поверхность является плоской в плоскости, перпендикулярной к теоретической центральной оси, в том смысле, что она имеет по меньшей мере одну непрерывную линию контакта с этой плоскостью на 360° вокруг оси и является идеально круглой. Хотя она является плоской в вышеупомянутом смысле, ее профиль в сечениях по радиальной плоскости, содержащей теоретическую центральную ось, может иметь разные формы: профиль может быть плоским, закругленным, в виде перевернутого V и т.д.
Во многих вариантах применения поверхность кольца является поверхностью, которая входит в контакт с прокладкой крышки или колпачка. Если поверхность кольца не является плоской, после закрывания могут возникнуть утечки. Поэтому важно знать дефекты плоскостности поверхности кольца. Эти дефекты плоскостности можно рассматривать в данной точке поверхности кольца как разность высоты, подразумеваемую в этом тексте как разность положения в направлении, параллельном теоретической центральной оси кольца емкости, между данной точкой реальной поверхности кольца и соответствующей точкой теоретической поверхности кольца. Эти две точки являются соответствующими в том смысле, что в системе цилиндрических координат с центром на теоретической центральной оси соответствующие точки имеют одинаковую угловую координату, при этом одна из них принадлежит к реальной поверхности кольца, а другая - к теоретической поверхности кольца. Таким образом, эта теоретическая поверхность является плоской относительно контрольной плоскости, перпендикулярной к теоретической центральной оси. Эта контрольная плоскость может быть связана с рассматриваемой емкостью и может, например, соответствовать высоте самой верхней точки реальной поверхности кольца, высоте самой нижней точки реальной поверхности кольца, средней высоте поверхности кольца на ее угловой протяженности и т.д. Контрольную плоскость можно также определить независимо от емкости, например, относительно устройства визуализации, контроля или измерения.
Часто различают по меньшей мере два типа дефектов плоскостности. Дефекты типа «недолива стекла» связаны с проблемами заполнения выдувной формы кольца расплавленным стеклом во время изготовления. Они характеризуются отклонениями высоты, которые находятся на небольшой угловой амплитуде вокруг теоретической оси. Дефекты типа «волнистого кольца» являются отклонениями высоты, как правило, менее выраженными, которые находятся на большей угловой амплитуде вокруг теоретической оси, но все же являются нежелательными дефектами, часто связанными с усадкой, с проблемами извлечения изделий из формы или с термическими проблемами.
В настоящее время дефекты плоскостности главным образом обнаруживают при помощи так называемой системы «колокола» путем отслеживания газовых утечек. Остаточную утечку измеряют, когда плоская металлическая поверхность опирается на кольцо. Недостатком является то, что контроль не дает элемента, позволяющего оценить серьезность дефекта, и позволяет только получить двоичное указание (утечка/отсутствие утечки), характеризующее наличие или отсутствие плоскостности поверхности. Такая система требует наличия механических средств перемещения относительно устройства, которые является не только дорогими, но к тому же замедляют рабочий ритм линии контроля: подъем и опускание колокола, временная остановка изделия под колоколом и т.д. Кроме того, желательно исключить любой контакт с кольцом изделия, чтобы избежать рисков повреждения или загрязнения.
Кроме того, известны системы визуального контроля, в которых кольца наблюдают по меньшей мере с двух точек: с верхней точки и с противоположной нижней точки. Диффузный источник света, расположенный противоположно камерам относительно изделия, просвечивает контролируемое изделие. Недостатком этой системы является то, что она требует использования по меньшей мере двух камер и двух источников света и, возможно, двух телецентрических объективов и их держателей и регулировок. Весь комплекс является дорогим и требует длинных оптических путей, что выражается в большом габарите.
Чтобы преодолеть эти недостатки, было предложено использовать, как было указано выше, камеры, уже предусмотренные для другого контроля емкости, например, в случае бутылок из прозрачного стекла, для контроля плеча бутылки. Однако это заставляет выбирать положения устройства, которые могут быть всего лишь компромиссом между регулировками для обнаружения дефектов в зоне плеча и регулировками для обнаружения геометрических дефектов поверхности кольца. Этот компромисс не является удовлетворительным ни для измерения, изначально производимого этими камерами, ни для измерения плоскостности, которые пытаются произвести при помощи этих же камер.
Увеличивая число углов зрения, в частности, комбинируя аналогичные углы зрения с разных верхних и нижних точек, можно также измерить в трех измерениях участки кольца и затем объединить эти измерения для воспроизведения путем вычисления общей геометрии поверхности кольца. Для этого применяют съемку нескольких оптических изображений. Затем эти оптические изображения объединяют попарно при помощи алгоритмов попарного совмещения точек и посредством триангуляции вычисляют реальные точки в координатах 3D. Технология соответствует способу получения стереоизображений со сложными алгоритмами. Необходимо получить несколько пар стереоизображений, что требует наличия 4 или 6 камер. Эти системы могут быть точными, но являются очень дорогими и громоздкими. С учетом многих параметров при длительной эксплуатации точность не сохраняется.
В документе US-6.172.748 описано устройство, содержащее несколько разных световых источников, которые освещают кольцо снизу, то есть из точки, находящейся ниже плоскости, перпендикулярной к оси кольца и касательной к поверхности кольца. Устройство содержит несколько разных зеркал, каждое из которых дает изображение только углового сектора кольца. Кроме того, даже если изображения перекрывают друг друга, между изображениями остаются азимутальные угловые разрывы, поскольку в возможной точке перекрывания двух изображений существует разрыв точки зрения между точкой перекрывания в каждом из изображений. Следовательно, существует необходимость в компьютерном воспроизведении изображения с использованием сложных алгоритмов.
Таким образом, изобретение призвано предложить устройство визуального контроля дефектов плоскостности поверхности кольца, которое является более простым, чем существующие системы.
В связи с этим изобретением предложен способ визуального контроля плоскостности реальной поверхности кольца емкости, при этом поверхность кольца имеет теоретическую плоскую и кольцевую или круглую геометрию вокруг теоретической центральной оси, содержащий этапы, на которых:
- освещают реальную поверхность кольца при помощи периферического падающего светового пучка,
- при помощи оптической системы формируют плоское изображение поверхности кольца емкости на двухмерном фотоэлектрическом датчике, отличающийся тем, что:
- периферический падающий световой пучок содержит радиальные световые лучи, содержащиеся в радиальной плоскости, содержащей теоретическую центральную ось, при этом указанные радиальные лучи направлены к теоретической центральной оси;
- периферический падающий световой пучок освещает поверхность кольца сверху, и радиальные лучи падающего светового пучка отражаются за счет зеркального отражения от поверхности кольца,
- тем, что этап, на котором формируют плоское изображение, включает в себя оптическую геометрическую трансформацию, которая преобразует реальную поверхность кольца в изображение поверхности кольца, причем эта трансформация теоретически преобразует теоретическую поверхность кольца в теоретическое изображение поверхности кольца,
- тем, что оптическая геометрическая трансформация преобразует реальную разность высоты по направлению теоретической центральной оси между рассматриваемой точкой реальной поверхности кольца и соответствующей точкой теоретической поверхности кольца в радиальное смещение изображения на изображении точки изображения поверхности кольца емкости по отношению к соответствующей точке теоретического изображения поверхности кольца;
- и тем, что на плоском изображении радиальное смещение изображения, соответствующее реальной унитарной разности высоты, превышает радиальное смещение изображения, соответствующее реальному радиальному смещению этого же размера между указанной рассматриваемой точкой реальной поверхности кольца и соответствующей точкой теоретической поверхности кольца.
Согласно другим факультативным признакам такого способа:
- радиальное смещение изображения, соответствующее реальной унитарной разности высоты, по меньшей мере в три раза превышает радиальное смещение изображения, соответствующее реальному радиальному смещению этого же размера между рассматриваемой точкой реальной поверхности кольца и соответствующей точкой на теоретической поверхности кольца.
- способ содержит этап, на котором наблюдают реальную поверхность кольца при помощи оптической системы под углом возвышения наблюдения менее 25° относительно плоскости, перпендикулярной к теоретической центральной оси.
- способ содержит этап, на котором наблюдают реальную поверхность кольца при помощи оптической системы под углом возвышения наблюдения менее 18,43° относительно плоскости, перпендикулярной к теоретической центральной оси.
- оптическая система определяет периферическое поле наблюдения, которое наблюдает поверхность кольца вдоль радиальных лучей наблюдения, которые содержатся в радиальной плоскости, содержащей теоретическую центральную ось, и которые образуют теоретический центральный угол менее 25° относительно плоскости, перпендикулярной к теоретической центральной оси.
- угол возвышения наблюдения меньше 18,43° относительно плоскости, перпендикулярной к теоретической центральной оси.
- оптическая система содержит первичную поверхность отражения, при этом первичная поверхность отражения является поверхностью вращения с осью на теоретической центральной оси, выполненной с возможностью прямого или опосредованного отражения световых лучей, проходящих от реальной поверхности кольца под углом наблюдения, в направлении датчика.
- этап, на котором формируют плоское изображение, включает в себя оптическое формирование полного и сплошного двухмерного изображения реальной поверхности кольца.
- в одной радиальной плоскости периферический падающий световой пучок содержит не параллельные радиальные лучи.
- падающий пучок освещает поверхность кольца под таким углом падения, при котором в точке отражения падающего луча его луч, отраженный реальной поверхностью кольца, наблюдается датчиком, и нормаль к поверхности кольца образует угол менее 30° относительно направления теоретической центральной оси.
Объектом изобретения является также способ определения плоскостности реальной поверхности кольца емкости, при этом поверхность кольца имеет плоскую и кольцевую теоретическую геометрию вокруг теоретической центральной оси, отличающийся тем, что включает в себя способ визуального контроля, характеризующийся одним из предыдущих признаков, и тем, что содержит этап определения радиального смещения изображения между линией, характеризующей изображение поверхности кольца, и теоретической линией, характеризующей теоретическое изображение поверхности кольца.
Согласно такому способу, линия, характеризующая изображение поверхности кольца, может быть изображением, формируемым оптической системой на датчике, отражения падающего пучка от поверхности кольца.
Объектом изобретения является также устройство визуального контроля плоскостности реальной поверхности кольца емкости, при этом поверхность кольца имеет плоскую и кольцевую или круглую теоретическую геометрию вокруг теоретической центральной оси, при этом устройство имеет зону установки емкости, причем эта зона установки имеет ось установки, содержащее:
- систему освещения, выполненную с возможностью излучать периферический падающий световой пучок, содержащий радиальные лучи, содержащиеся в радиальной плоскости, содержащей ось установки, при этом указанные радиальные лучи направлены к оси установки,
- двухмерный фотоэлектрический датчик,
- оптическую систему, расположенную между зоной установки емкости и датчиком и выполненную с возможностью формирования на датчике изображения поверхности кольца емкости, находящейся в зоне установки,
и в котором система освещения, датчик и оптическая система расположены над зоной установки,
отличающееся тем, что оптическая система определяет периферическое поле наблюдения, которое наблюдает поверхность кольца вдоль радиальных лучей наблюдения, которые содержатся в радиальной плоскости, содержащей ось установки, и которые образуют угол возвышения наблюдения менее 25° относительно плоскости, перпендикулярной к оси установки,
и тем, что система освещения содержит световой источник с осью на оси установки, имеющий диаметр, превышающий диаметр поверхности кольца.
Согласно другим факультативным признакам такого устройства:
- устройство содержит двухмерный фотоэлектрический датчик, на котором формируют полное и сплошное изображение реальной поверхности кольца.
- устройство содержит первичную поверхность отражения, при этом первичная поверхность отражения является поверхностью вращения с осью на оси установки, выполненной с возможностью прямого или опосредованного отражения световых лучей, проходящих от реальной поверхности кольца под углом возвышения наблюдения, в направлении датчика.
- первичная поверхность отражения отражает опосредованно световые лучи в направлении датчика, и устройство содержит между первичной поверхностью отражения и датчиком по меньшей мере одну вторую поверхность отражения.
- первичная поверхность отражения содержит поверхность вращения, обращенную противоположно оси установки и имеющую малый диаметр и большой диаметр, причем оба диаметра меньше наименьшего диаметра теоретической поверхности кольца.
- первичная поверхность отражения является выпуклой усеченной конусной поверхностью и имеет делительный угол в вершине, равный 45° минус половина угла возвышения наблюдения.
- первичная поверхность отражения содержит поверхность вращения, обращенную к оси установки, имеющую малый диаметр и большой диаметр, причем оба диаметра больше наибольшего диаметра теоретической поверхности кольца, таким образом, чтобы отражать в направлении оси установки световые лучи, проходящие от реальной поверхности кольца, под углом возвышения наблюдения, при этом указанные лучи перехватываются поверхностью обратного отражения, которая содержит поверхность вращения, обращенную противоположно оси установки, таким образом, чтобы отражать лучи в направлении датчика.
- траектория лучей между первичной поверхностью отражения и поверхностью обратного отражения является перпендикулярной к оси установки.
- поверхность обратного отражения содержит выпуклую усеченную конусную поверхность вращения с осью на оси установки и с делительным углом в вершине 45°.
- устройство содержит между датчиком и первичной поверхностью отражения телецентрическую оптическую систему.
- в одной радиальной плоскости периферический падающий пучок содержит не параллельные радиальные лучи.
- световой источник является кольцевым источником в виде тела вращения с осью на оси установки.
- устройство содержит корпус, в котором находятся датчик, система объектива, первичная поверхность отражения и, возможно, поверхность обратного отражения.
Объектом изобретения является также линия контроля емкостей, имеющих поверхность кольца, в которой емкости перемещаются на конвейерной линии при помощи конвейера, который переносит емкости в горизонтальном направлении перемещения, перпендикулярном к теоретической центральной оси емкостей, которые имеют, таким образом, обращенную вверх поверхность кольца в горизонтальной плоскости, отличающаяся тем, что установка содержит устройство, имеющее любой из предыдущих признаков, которое расположено на установке с осью установки в вертикальном положении таким образом, что поле наблюдения и падающий световой пучок ориентированы вниз к зоне установки, которая находится между устройством и транспортировочным элементом конвейера.
В такой линии контроля конвейер может перемещать емкости таким образом, чтобы их теоретическая центральная ось совместилась с осью установки, и в момент этого совмещения при помощи устройства снимают изображение без контакта устройства с емкостью.
Различные отличительные признаки будут более очевидны из нижеследующего описания со ссылками на прилагаемые чертежи, которые иллюстрируют в качестве не ограничительных примеров варианты выполнения изобретения.
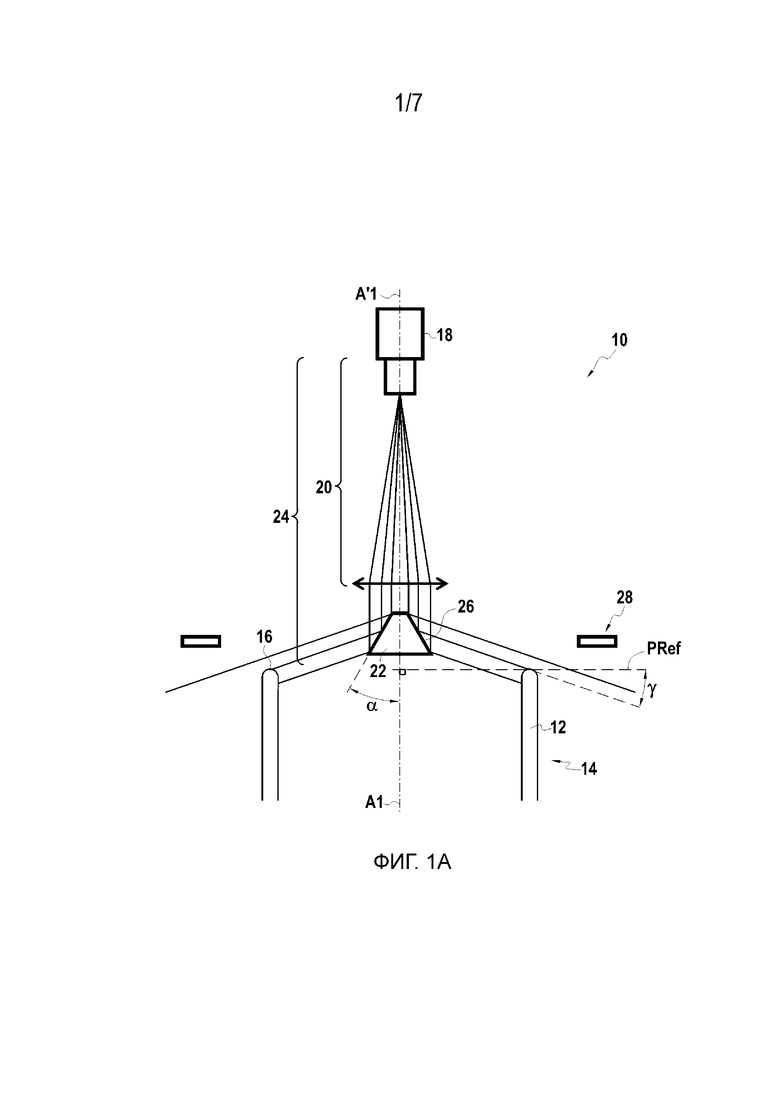
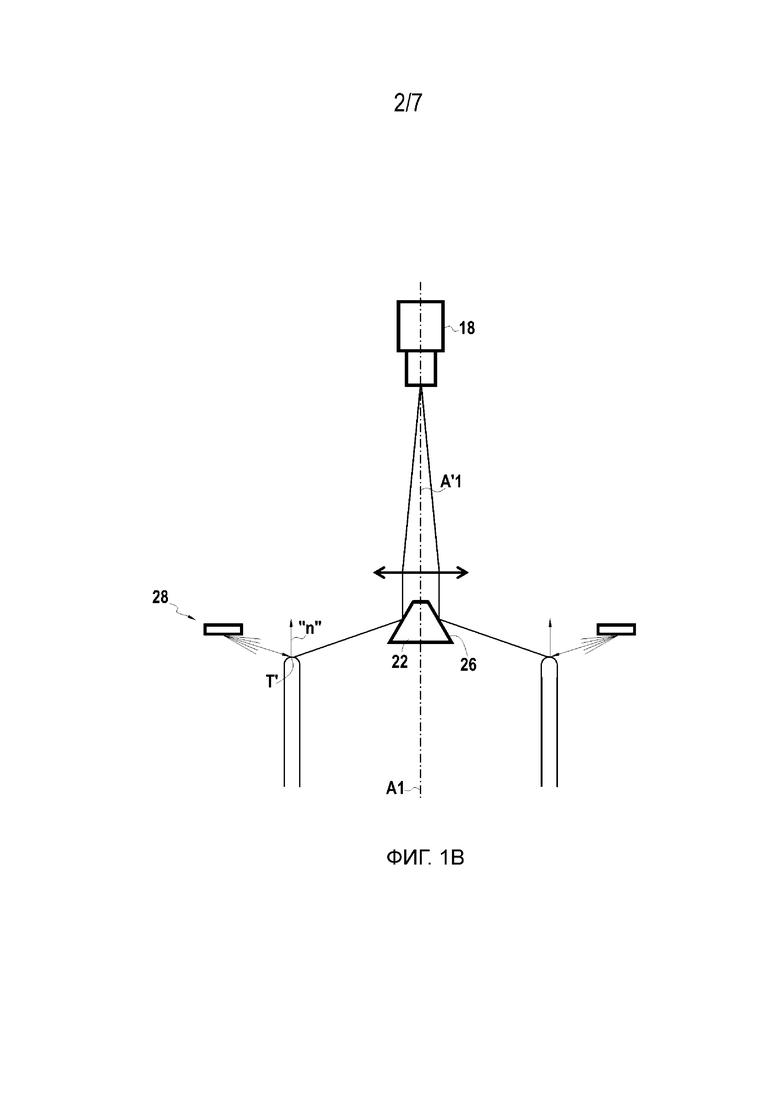
Фиг. 1А и 1В - схематичные виды в осевом сечении, иллюстрирующие заявленное устройство для осуществления заявленного способа, при этом на фиг. 1А показаны лучи наблюдения, символизирующие наблюдение фотоэлектрического датчика, а на фиг. 1В показана траектория падающих лучей, проходящих от светового источника и отражаемых поверхностью кольца емкости в направлении датчика через оптическую систему.
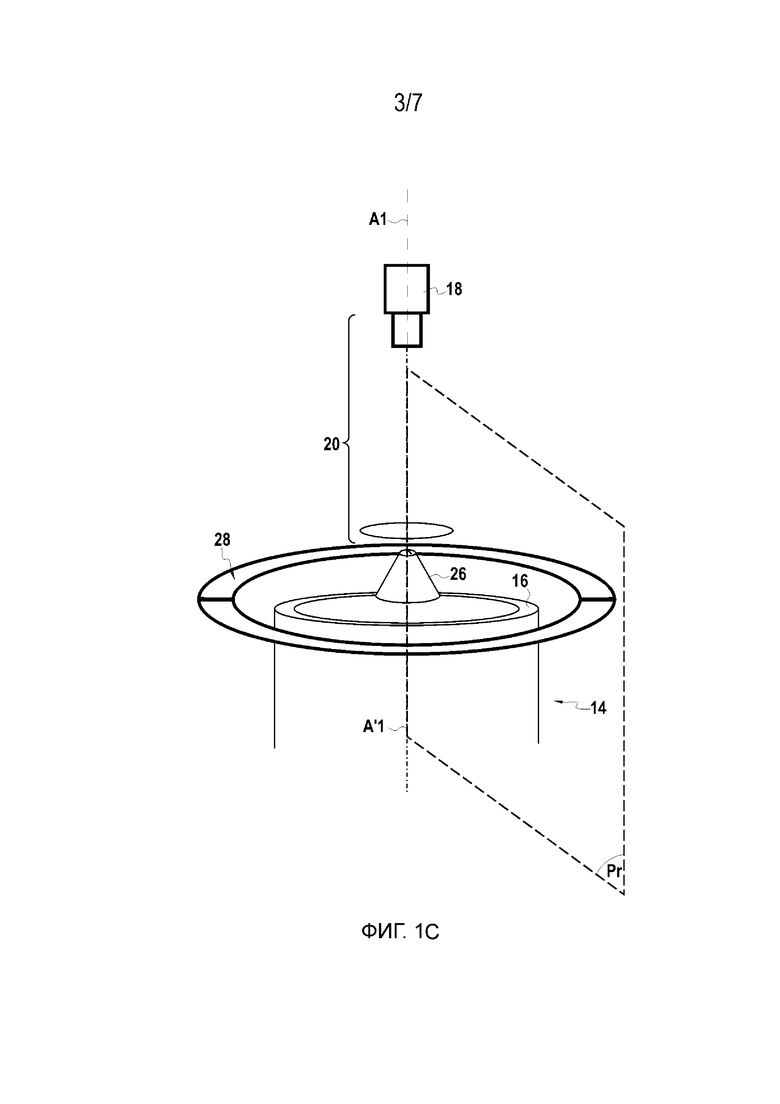
Фиг. 1С - схематичный вид в перспективе варианта выполнения, показанного на фиг.1А и 1В.
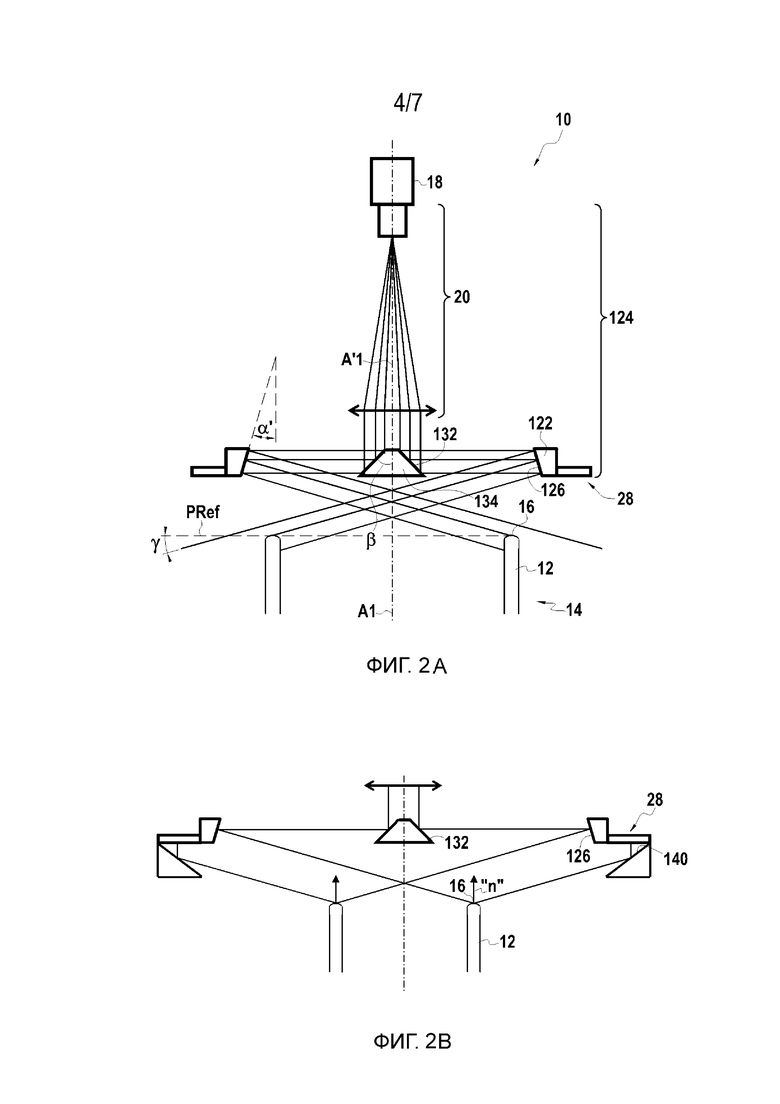
Фиг. 2А - вид, аналогичный фиг. 1А, второго заявленного устройства для осуществления второго заявленного способа.
Фиг. 2В - вид, аналогичный фиг. 1В, версии второго заявленного устройства.
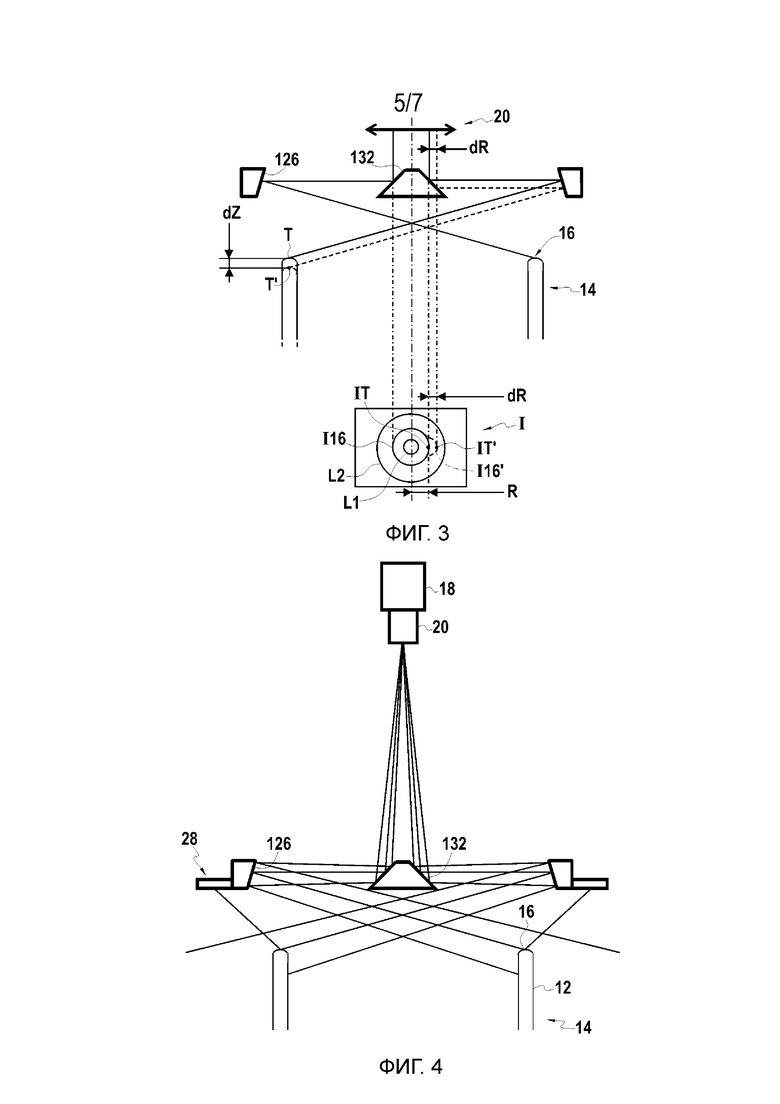
Фиг. 3 - схема, показывающая, каким образом в рамках устройства и способа, показанных на фиг. 2А, оптическая геометрическая трансформация преобразует реальную разность высоты в направлении теоретической центральной оси между точкой реальной поверхности кольца и соответствующей точкой на теоретической поверхности кольца в радиальное смещение на изображении соответствующей точки изображения поверхности кольца емкости относительно соответствующей точки теоретического изображения поверхности кольца.
Фиг. 4 - схематичный вид версии устройства и способа, показанных на фиг. 2А, в которой оптическая система не является телецентрической.
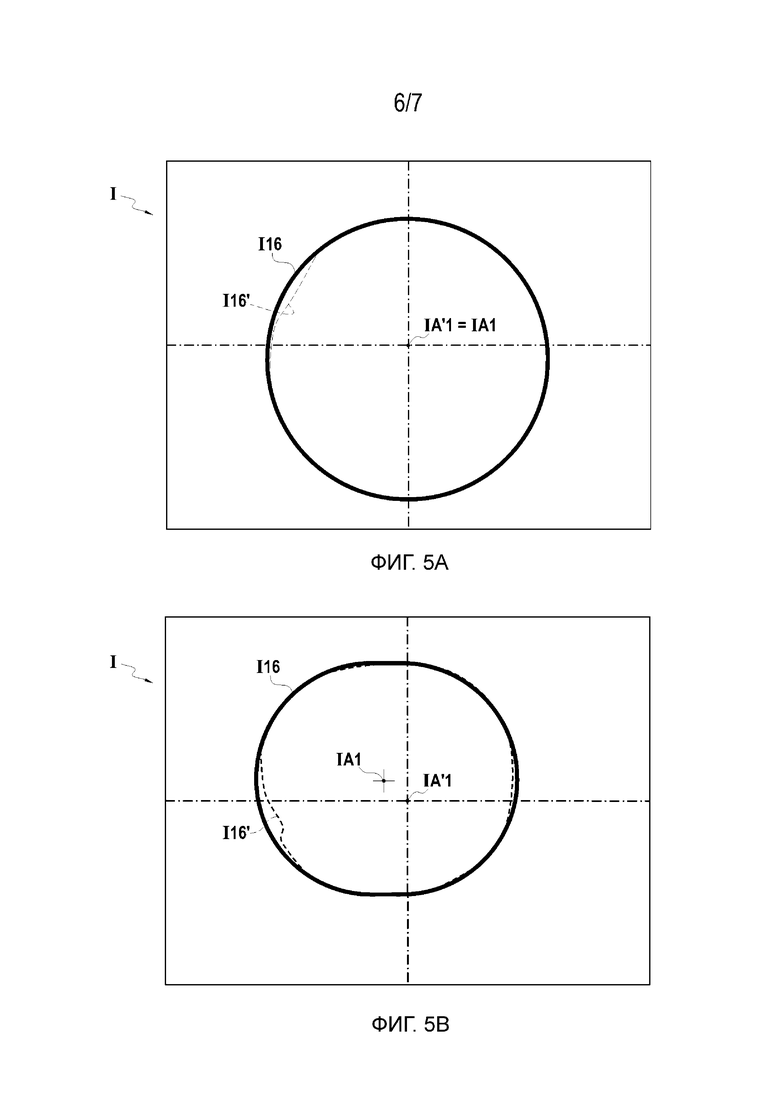
Фиг. 5А и 5В - схематичные виды, иллюстрирующие два примера изображений, снятых в рамках заявленных способа и устройства.
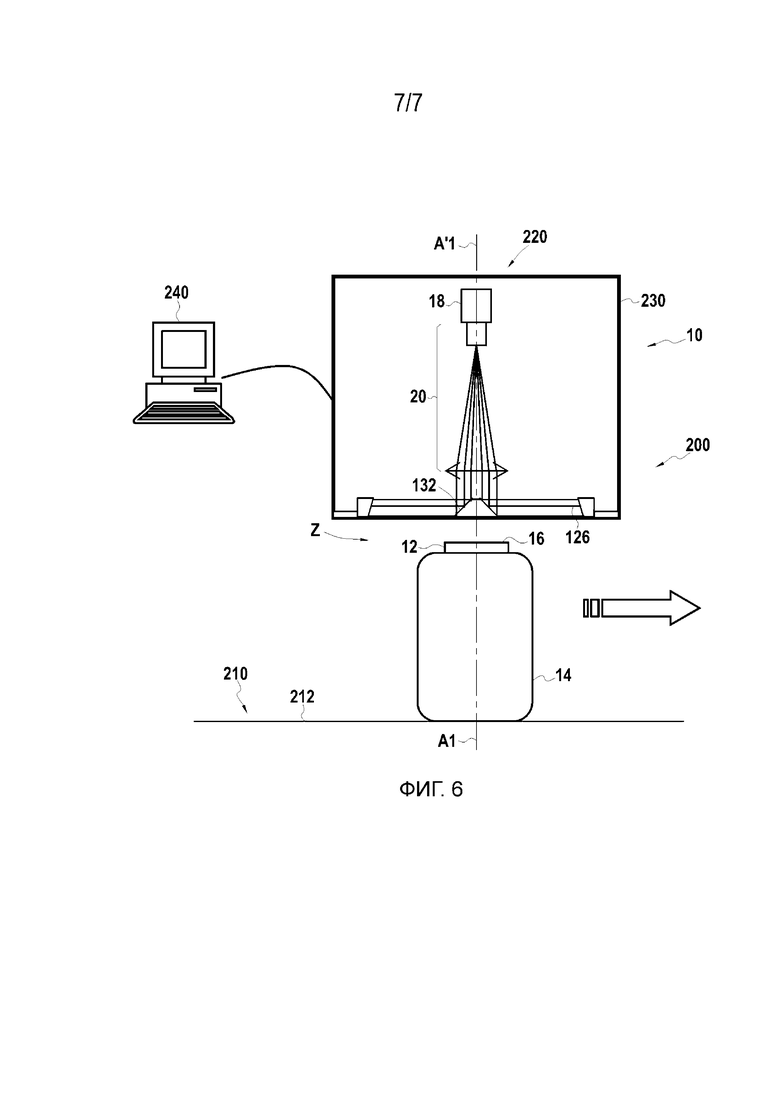
Фиг. 6 - схематичный вид установки контроля емкостей, содержащей заявленное устройство.
На фиг. 1А-1С представлено устройство визуального контроля плоскостности реальной поверхности кольца емкости, причем это устройство позволяет применять заявленный способ. На фиг. 1А-1С показана только верхняя часть кольца 12 емкости 14. Емкость 14 представляет собой полый сосуд, образующий внутренний объем, закрытый по всей своей объемной периферии, исключая уровень верхнего кольца 12, открытого на своем конце.
Для удобства и исключительно в качестве произвольного определения будем считать, что емкость имеет теоретическую центральную ось А1, определяемую как теоретическую центральную ось ее кольца 12. Будем также произвольно считать, что кольцо расположено на верхнем конце емкости. Таким образом, в настоящем тексте понятия «верх», «низ», верхний» и «нижний» имеют относительное значение, соответствующее показанной на фигурах ориентации устройства 10 и емкости 14. Однако понятно, что изобретение можно применять с любой абсолютной ориентацией в пространстве, поскольку различные компоненты остаются в одном и том же относительном положении.
Кольцо 12 емкости имеет форму цилиндрического тела вращения вокруг оси А1. Не показанный корпус емкости может тоже иметь круглый или не круглый объем вращения. Кольцо 12 соединено своим нижним концом (не показан) с остальной частью корпуса емкости, тогда как его другой свободный конец, произвольно называемый верхним в рамках настоящего изобретения, заканчивается поверхностью 16 кольца. Теоретически поверхность 16 кольца является плоской и параллельной относительно плоскости, перпендикулярной к оси А1, в том смысле, что имеет по меньшей мере одну непрерывную линию контакта с такой плоскостью на 360° вокруг теоретической центральной оси и теоретически является круглой или кольцевой в этой плоскости. В настоящем тексте следует различать, с одной стороны, реальную поверхность кольца емкости и, с другой стороны, теоретическую поверхность кольца. Эта теоретическая поверхность кольца является, таким образом, плоской поверхностью в контрольной плоскости, перпендикулярной к теоретической центральной оси А1. Эту контрольную плоскость можно определить как связанную с рассматриваемой емкостью, такую как контрольная плоскость PRef на фиг. 1А, которая является касательной к точке реальной поверхности 16 кольца, например, к самой верхней точке по направлению теоретической центральной оси А1. В альтернативном варианте эта контрольная плоскость может, например, находиться на высоте самой нижней точки реальной поверхности кольца, на средней высоте поверхности кольца на его угловой протяженности, и т.д. Контрольную плоскость можно также определить независимо от емкости, например, относительно одного из элементов устройства 10 визуального контроля, например, на уровне нижней поверхности корпуса устройства 10.
Таким образом, визуальный контроль плоскостности в основном будет состоять в визуальном наблюдении и позволит количественно определить отклонение положения по направлению теоретической центральной оси А1 между данной точкой реальной поверхности кольца и соответствующей точкой теоретической поверхности кольца. Эти две точки являются соответствующими в том смысле, что в системе цилиндрических координат имеют одинаковую угловую координату, и одна из них принадлежит к реальной поверхности кольца, а другая к теоретической поверхности кольца. Иначе говоря, если пренебречь различиями в радиальном положении, они расположены вертикально одна над другой в осевом направлении теоретической центральной оси А1.
Чтобы правильно контролировать емкость, необходимо правильно располагать емкость перед устройством 10 визуального контроля. Для этого заявленное устройство содержит зону установки, в которой необходимо расположить емкость. Эту зону установки можно определить по оси А’1 установки, и плоскость установки (не показана) можно определить как плоскость, перпендикулярную к оси А’1 установки, находящуюся на уровне самой нижней точки устройства. Следовательно, для правильного контроля емкость необходимо расположить таким образом, чтобы ее теоретическая центральная ось А1 максимально соответствовала оси А’1 установки и чтобы ее кольцо было расположено своим верхним открытым концом в направлении устройства 10, но ниже плоскости установки. В идеальном случае обе оси А1 и А’1 совпадают. Понято, что все заявленное устройство 10 визуального контроля можно расположить над плоскостью установки без риска контакта с устройством. Следовательно, емкость 14 можно доставлять любым поступательным движением в направлении, перпендикулярном к оси А’1 установки, без риска столкновения с устройством 10.
В рамках заявленных устройства и способа применяют двухмерный фотоэлектрический датчик 18, предназначенный для съемки двухмерного изображения реальной поверхности кольца емкости. Этот датчик, который также называется матричным датчиком, может быть встроенным в камеру 19 и может быть, например, типа CCD или CMOS. Датчик 18 содержит, например, двухмерную матрицу фотоэлектрических элементов. Как правило, датчик связан с электронной схемой обработки сигналов, поступающих от фотоэлектрических элементов, чтобы выдавать аналоговый, цифровой или компьютерный сигнал, характеризующий изображение, получаемое при помощи датчика. Этот сигнал, характеризующий изображение, получаемое при помощи датчика, можно затем направить в устройство обработки изображений и/или в устройство визуализации и/или в устройство хранения изображений (не показаны). Как правило, датчик 18 связан с оптической системой 20 объектива, которая может содержать один или несколько оптических элементов, в частности, одну или несколько тонких линз и, возможно, диафрагму, которые вместе позволяют сформировать изображение на датчике.
В примере, показанном на фиг. 1А-1С, оптическая система 20 объектива, связанная с датчиком 18, представляет собой телецентрическую систему объектива. Телецентрическая система объектива хорошо известна специалисту в области устройств промышленного визуального контроля, так как ее используют для формирования изображения на датчике, которое не имеет или почти не имеет эффекта параллакса. В теоретической оптике телецентрическая система объектива является системой объектива, входной зрачок которой позиционирован на бесконечность. Следовательно, такой объектив наблюдает в своем поле зрения вдоль параллельных или почти параллельных лучей наблюдения, откуда и отсутствие эффекта параллакса. Предпочтительно оптическая ось системы 20 объектива совпадает с осью А’1 установки. Вместе с тем, можно представить, что эта ось является не прямолинейной, а сегментированной, например, при интегрировании зеркала с отражением на 45° в систему объектива. Так, можно предусмотреть зеркало углового отражения на 45° относительно оси установки с первым сегментом оптической оси со стороны датчика, который будет расположен на 90° относительно оси установки, и со вторым сегментом с другой стороны зеркала углового отражения, который будет расположен в соответствии с осью А’1 установки.
Показанная на фиг. 1А-1С оптическая система расположена вертикально вдоль оси А’1 и обращена вниз для наблюдения зоны установки под устройством, то есть чтобы наблюдать возможную емкость 14, находящуюся в зоне установки. Таким образом, фотоэлектрический датчик 18 находится в вершине устройства визуального контроля и обращен вниз в направлении зоны установки. При таком расположении понятно, что теоретическая поверхность кольца емкости 14, находящейся в зоне установки, содержится в плоскости, параллельной плоскости датчика. Таким образом, при использовании простого телецентрического объектива без другой оптической системы, изображение поверхности кольца, которое могло бы быть сформировано на датчике, не позволило бы «увидеть» дефект плоскостности. Наоборот, никакого отклонения высоты этой поверхности кольца увидеть невозможно.
Таким образом, согласно изобретению, между зоной установки емкости и датчиком расположена оптическая система 24 для формирования на датчике изображения поверхности кольца такой емкости, находящейся в зоне установки. Кроме оптической системы 20 объектива, такая оптическая система содержит по меньшей мере один оптический элемент 22, который в данном случае расположен между системой 20 объектива и зоной установки. Таким образом, вся оптическая система 24 между датчиком 18 и зоной установки содержит систему 20 объектива и оптический элемент или оптические элементы 22.
На практике ось А’1 установки можно определить как продолжение в зоне установки оптической оси оптической системы 24.
В представленном примере датчик 18, его система 20 объектива, оптический элемент 22 и зона установки расположены в этом порядке вдоль одной оси А’1 установки.
Заявленный способ содержит этап, на котором через оптическую систему 24 формируют плоское изображение поверхности кольца на датчике посредством оптической геометрической трансформации, которая преобразует реальную поверхность кольца в изображение поверхности кольца. Такая же трансформация теоретически преобразует теоретическую поверхность кольца в теоретическое изображение поверхности кольца в том смысле, что теоретическое изображение поверхности кольца является изображением, которое было бы получено посредством трансформации реальной поверхности кольца, которая совпадала бы с теоретической поверхностью кольца. Эта оптическая геометрическая трансформация, пример которой показан на фиг. 3, преобразует реальную разность высоты dZ по направлению теоретической центральной оси между рассматриваемой точкой Т’ реальной поверхности кольца и соответствующей точкой Т теоретической поверхности кольца в радиальное смещение изображения dR на изображении точки IT’ изображения поверхности кольца емкости относительно соответствующей точки IT теоретического изображения поверхности кольца. Соответствующая точка Т теоретической поверхности кольца является точкой этой теоретической поверхности, которая имела бы ту же угловую координату, что и рассматриваемая точке T’ в системе цилиндрических координат с центром на теоретической центральной оси. Точка IT’ изображения поверхности кольца емкости является изображением рассматриваемой точки T’ реальной поверхности кольца через оптическую систему в результате оптической геометрической трансформации. Соответствующая точка IT теоретического изображения поверхности кольца является изображением соответствующей точки теоретической поверхности кольца через оптическую систему в результате оптической геометрической трансформации.
Предпочтительно оптическая геометрическая трансформация не затрагивает относительного углового позиционирования двух точек поверхности кольца вокруг оси в том смысле, что две точки реальной поверхности кольца, разделенные угловым отклонением вокруг теоретической центральной оси, имеют в изображении, полученном посредством оптической геометрической трансформации, свои соответствующие изображения, разделенные таким же угловым отклонением вокруг изображения теоретической центральной оси.
В примере, представленном на фиг. 1А-1С, оптический элемент 22, который в основном обеспечивает эту оптическую трансформацию, содержит первичную поверхность 26 отражения, при этом первичная поверхность 26 является поверхностью тела вращения с осью на оси А’1 установки и выполнена с возможностью отражать световые лучи, поступающие от реальной поверхности кольца, в направлении датчика. Таким образом, первичная поверхность 26 отражения имеет зеркальные свойства. Предпочтительно она может представлять собой зеркало, но может быть также выполнена в виде призмы, то есть может быть оптическим диоптром.
Ось А’1 установки можно определить как ось симметрии вращения первичной поверхности 26 отражения.
В этом первом примере отражение световых лучей, поступающих от реальной поверхности кольца, в сторону датчика является прямым отражением без другой поверхности отражения.
В примере, представленном на фиг. 1А-1С, первичная поверхность 26 отражения является поверхностью тела вращения, которая обращена противоположно оси А’1 установки и которая расширяется в направлении зоны установки. В частности, первичная поверхность 26 отражения содержит выпуклую усеченную конусную поверхность, имеющую малый диаметр и большой диаметр, причем оба диаметра меньше диаметра теоретической поверхности кольца. Ее малый диаметр расположен со стороны датчика вдоль оси установки, тогда как ее большой диаметр находится со стороны зоны установки.
Согласно аспекту изобретения, учитывая эту оптическую геометрическую трансформацию, в плоском изображении, попадающем на датчик, радиальное смещение изображения в результате реальной унитарной разности высоты превышает радиальное смещение изображения, получаемое в результате реального радиального смещения этого же размера между рассматриваемой точкой реальной поверхности кольца и соответствующей точкой теоретической поверхности кольца. Иначе говоря, влияние реальной разности высоты больше влияния реальной радиальной разности в радиальном смещении изображения, получаемом в оптической геометрической трансформации. Так, смещение высоты на 1 мм реальной поверхности кольца относительно теоретической поверхности кольца приведет к первому радиальному смещению изображения, тогда как радиальное смещение на 1 мм реальной поверхности кольца относительно теоретической поверхности кольца приведет ко второму радиальному смещению изображения, и, согласно изобретению, первое радиальное смещение изображения больше второго радиального смещения изображения.
В заявленном устройстве это преобладание обеспечивается тем, что оптическая система определяет периферическое поле наблюдения, которое наблюдает поверхность кольца сверху вдоль радиальных лучей наблюдения, содержащихся в радиальной плоскости, содержащей ось установки, и образующих с плоскостью PRef, перпендикулярной к оси А’1 установки, угол возвышения наблюдения, который во всех случаях меньше 45° и предпочтительно меньше 25°.
Предпочтительно периферическое поле наблюдения не имеет азимутального разрыва вокруг оси А’1 установки. В частности, нет азимутальных угловых разрывов между двумя бесконечно близкими в угловом направлении радиальными лучами наблюдения вокруг оси установки. Таким образом, не существует разрыва точки зрения в изображении, который мог бы затруднить интерпретацию изображения.
Предпочтительно периферическое поле наблюдения является также сплошным по азимуту в том смысле, что не перекрывается никакой азимутальный угол наблюдения вокруг оси установки. Однако в некоторых случаях, в частности, с учетом требований физической установки, может все же случиться, что один или несколько угловых секторов вокруг оси установки оказываются скрытыми, сохраняя при этом отсутствие азимутального разрыва. Предпочтительно такой скрытый азимутальный угловой сектор будет иметь небольшую и даже незначительную протяженность, предпочтительно менее 10 градусов и даже предпочтительно менее 5 градусов вокруг оси установки.
Пример этого периферического поля наблюдения представлен на фиг. 1А. Это поле наблюдения простирается на 360° вокруг оси А’1 установки. Это поле наблюдает «сверху» в том смысле, что поверхность кольца наблюдается из точки над плоскостью PRef, перпендикулярной к теоретической центральной оси А1 поверхности кольца и касательной по меньшей мере в одной точке к поверхности кольца, предпочтительно в самой верхней точке относительно направления теоретической центральной оси А1. Угол возвышения наблюдения соответствует углу γ, образованному между плоскостью, перпендикулярной к оси А’1 установки, и лучом наблюдения, проходящим от поверхности кольца, который может наблюдаться датчиком через оптическую систему 24. В рамках устройства, снабженного телецентрической оптической системой, все лучи наблюдения, видимые датчиком, параллельно заходят в систему объектива. Если к тому же, как в системе, показанной на фиг. 1, первичная поверхность 26 отражения является усеченной конусной поверхностью, описанной прямой линией, угол возвышения наблюдения γ является единым углом для любого луча наблюдения, и его можно вывести напрямую из наклона первичной поверхности 26 отражения относительно оси А’1 установки.
Однако, как будет показано для случая устройства, не имеющего телецентрической оптической системы, или в случае, когда оптический элемент 22 не является строго конусом, образованным прямой, лучи наблюдения, попадающие на датчик, могут иметь разные углы возвышения наблюдения. В этом случае можно условно принять, что угол возвышения наблюдения является самым большим углом, относительно плоскости, перпендикулярной к оси А’1 установки, луча наблюдения, который проходит от поверхности 16 кольца и который может видеть датчик 18 через оптическую систему 24.
В примере выполнения заявленного устройства, показанного на фиг. 1А и содержащего усеченную конусную первичную поверхность 26 отражения, выпуклую в плоскости, перпендикулярной к оси установки, это свойство, согласно которому влияние реальной разности высоты больше влияния реальной разности высоты в радиальном смещении изображения, получаемом при оптической геометрической трансформации, обеспечивается именно углом первичной поверхности 26 отражения относительно оси А1 установки. В частности, делительный угол α в вершине, характерный для выпуклой первичной поверхности 26 отражения, определяет соотношение влияния на радиальном смещении изображения между разностью высоты и радиальной разностью реальной поверхности относительно теоретической поверхности кольца. Чем больше этот делительный угол α в вершине приближается к 45°, тем больше будет влияние разности высоты на радиальное смещение изображения. Разумеется, необходимо следить, чтобы этот делительный угол в вершине оставался меньше 45°, чтобы оптической элемент 22, имеющий первичную поверхность 26 отражения, можно было расположить над поверхностью 16 кольца, при этом датчик 18 будет видеть таким образом поверхность 16 кольца сверху через оптическую систему 24. Во всех случаях этот делительный угол α в вершине превышает 22,5°, чтобы влияние реальной разности высоты было больше влияния реального радиального смещения в радиальном смещении изображения.
Первичная поверхность отражения может быть не усеченной конусной поверхностью, а расширяющейся поверхностью вращения двойной кривизны, образованной при вращении вокруг оси А’1 установки не прямым участком кривой, например, участком параболы, гиперболы или эллипса. В радиальной плоскости эта поверхность будет иметь, например, вогнутый или выпуклый профиль, сохраняя при этом выпуклый профиль в плоскости, перпендикулярной к оси А’1 установки. Такую поверхность двойной кривизны можно использовать, в частности, чтобы сделать систему 24 в ее совокупности телецентрической относительно датчика, если система 20 объектива таковой не является.
Предпочтительно в рамках заявленного способа радиальное смещение изображения, соответствующее реальной унитарной разности высоты, по меньшей мере в 2,14 раза больше и предпочтительно по меньшей мере в 3 раза больше радиального смещения изображения, соответствующего реальному радиальному смещению этого же размера между указанной точкой реальной поверхности кольца и соответствующей точкой теоретической поверхности кольца. Таким образом, гарантируют, чтобы в полученном изображении радиальное смещение в основном было связано со смещением по высоте реальной поверхности кольца относительно теоретической поверхности кольца, а не с радиальным смещением между этими двумя поверхностями.
В устройстве, показанном на фиг. 1А, это соотношение 3 в оптической геометрической трансформации соответствует делительному углу в вершине первичной поверхности отражения, превышающему 35,785°. Это значение позволяет получить угол возвышения наблюдения меньше 18,43°. В примере выполнения, показанном на фиг. 1А, угол возвышения наблюдения равен 15°, и делительный угол α в вершине первичной поверхности 26 отражения равен 37,5°. В целом, выпуклая первичная поверхность 26 отражения может быть усеченной конусной поверхностью вращения, сплошной на 360° вокруг оси А’1 установки и имеющей делительный угол α в вершине, равный 45° минус половина угла возвышения наблюдения.
Предпочтительно поверхность 26 отражения не имеет разрывов кривизны вокруг оси А’1 установки, при этом кривизну рассматривают в плоскости, перпендикулярной к оси А’1 установки, чтобы обеспечить поле наблюдения без азимутального разрыва.
Предпочтительно поверхность 26 отражения является также сплошной по азимуту в том смысле, что она является непрерывно отражающей вокруг оси А’1 установки без скрытого углового сектора, чтобы обеспечивает азимутальную непрерывность поля наблюдения.
Согласно другому аспекту изобретения, в рамках способа визуального контроля предусмотрено освещать реальную поверхность 16 кольца емкости при помощи периферического падающего светового пучка, то есть проходящего на 360° вокруг оси А’1 установки. Поверхность кольца освещается сверху в том смысле, что падающие световые лучи проходят к поверхности 16 кольца от точек, находящихся над плоскостью PRef, перпендикулярной к теоретической центральной оси А1 и касательной к точке поверхности кольца, предпочтительно к самой верхней точке по направлению теоретической центральной оси А1. Этот периферический падающий световой пучок содержит падающие радиальные световые лучи, содержащиеся в радиальной плоскости, содержащей ось установки, при этом указанные падающие радиальные лучи направлены к оси, как показано на фиг. 1В. Падающие радиальные лучи могут быть параллельными лучами, хотя это и не обязательно, и в способе, представленном на фиг. 1В, периферический падающий световой пучок содержит не параллельные радиальные лучи в данной радиальной полуплоскости Pr (показана на фиг. 1С), содержащей ось установки и ограниченной осью установки. Некоторые из радиальных лучей направлены к оси установки, не будучи обязательно перпендикулярными к этой оси. С другой стороны, на фиг. 1В показано, что периферический падающий световой пучок может содержать радиальные лучи, которые образуют с плоскостью, перпендикулярной к оси установки, угол возвышения, предпочтительно составляющий от 0 до 45 градусов. Предпочтительно световой пучок содержит радиальные лучи в виде сплошного или по существу сплошного веера. Этот веер может иметь угловую протяженность не менее 30 градусов и даже больше. Лучи, содержащиеся в этом веере, могут образовать угол возвышения с плоскостью, перпендикулярной к теоретической центральной оси, составляющий от 5 до 40 градусов.
Таким образом, заявленное устройство содержит систему освещения, выполненную с возможностью выдавать такой периферический падающий световой пучок с радиальными лучами, содержащимися в радиальной плоскости, содержащей ось А’1 установки. Предпочтительно эта система освещения содержит кольцевой световой источник 28 с осью на оси А’1 установки. Предпочтительно он имеет диаметр, превышающий диаметр реальной поверхности кольца емкостей, которые необходимо контролировать при помощи устройства. Этот кольцевой световой источник расположен над зоной установки, то есть над реальной поверхностью кольца. В радиальной полуплоскости Pr, содержащей ось А’1 установки и ограниченной этой осью установки, кольцевой световой источник 28 соответствует источнику, который может быть точечным или, наоборот, может иметь определенную угловую протяженность в этой полуплоскости Pr, как показано на фигурах. Этот световой источник светит в направлении зоны установки, то есть в направлении оси установки, но образует с ней угол, чтобы производить освещение в направлении вниз. Если этот источник не является источником, излучающим параллельные лучи, предпочтительно он излучает в этой радиальной полуплоскости световой конус, содержащий радиальные лучи в виде сплошного или по существу сплошного веера, как показано на фиг. 1В. Этот веер может, например, образовать угловой сектор протяженностью от 0 до 45 градусов относительно плоскости, перпендикулярной к теоретической центральной оси. Угловая протяженность веера может быть ограничена одним или несколькими каше. Вместе с тем, световой источник может излучать в намного большем веере.
Поскольку световой источник 28 является периферическим, его можно уподобить множеству источников, возможно точечных или почти точечных, расположенных вокруг оси А’1 установки и излучающих, каждый, вышеупомянутый веер света. Предпочтительно световой источник является сплошным по всей периферии на 360° вокруг оси установки в том смысле, что в каждой радиальной полуплоскости он излучает одинаковый световой веер. Однако в действительности световой источник не является идеально сплошным. Он может прерываться на угловом секторе, предпочтительно ограниченном, вокруг оси А’1. Кроме того, световой источник может не быть сплошным в том смысле, что он может быть образован совокупностью расположенных рядом отдельных дискретных источников, например, светодиодов.
Предпочтительно падающий пучок освещает поверхность 16 кольца сверху под таким углом падения, чтобы в точке отражения T’ падающего луча, при которой датчик видит луч, отраженный реальной поверхностью кольца, нормаль “n” к поверхности кольца образовала относительно оси А’1 угол менее 30°, предпочтительно менее 10°. В рамках идеальной геометрии с реальной поверхностью кольца, соответствующей теоретической поверхности кольца, свет, отраженный поверхностью кольца и наблюдаемый датчиком 18, является светом, который отражается локально самой верхней точкой или точкой, близкой к локально самой верхней точке поверхности кольца. В данном случае учитывается только то, что происходит в радиальной полуплоскости Pr устройства и контролируемой поверхности кольца. Так, локально самая верхняя точка поверхности кольца является точкой, которая в профиле поверхности кольца в этой радиальной полуплоскости Pr является самой верхней по направлению оси установки. Кроме того, локально самую верхнюю точку определяют как точку, для которой нормаль к поверхности кольца проходит параллельно оси установки. На фиг. 1В показан падающий луч, излучаемый световым источником и отражаемый точкой Т’ поверхности кольца в виде отраженного луча, который перехватывает первичная поверхность 26 отражения и который оптическая система направляет в сторону датчика. Например, нормаль “n” к поверхности 16 кольца в точке Т’ является по существу параллельной направлению оси установки, и точка T’ является локально самой верхней точкой профиля поверхности кольца в соответствующей радиальной полуплоскости.
В рамках устройства это условие можно соблюдать путем выбора соответствующего положения светового источника 28. Это положение, которое может быть, например, определено диаметром кольцевого источника 28 и его положением по высоте вдоль направления оси А’1 установки, определяет угол падения лучей, который могут освещать поверхность кольца. Разумеется, диаметр и положение по высоте реальной поверхности 16 кольца определяют, в сочетании с ориентацией нормали к точке отражения на поверхности кольца, какой или какие из лучей, излучаемых источником 28, могут быть отражены в направлении датчика. Таким образом, понятно, что для каждого диаметра поверхности кольца следует адаптировать либо диаметр кольцевого источника, либо его положение по высоте относительно поверхности 16 кольца. Вместе с тем, отслеживание локально самой верхней точки поверхности кольца не является критически обязательным условием. Действительно, в рамках плоской и кольцевой поверхности кольца внутренний и наружный радиальные края поверхности кольца обязательно имеют небольшое закругление, вследствие чего, даже если точка отражения падающего света находится на этом закруглении, разность высоты между точкой отражения и локально самой верхней точкой, как правило, будет считаться ничтожной. В рамках поверхности кольца, профиль которого в радиальной полуплоскости имеет закругление, будет также считаться, что, если отражение происходит от точки, которая не является локально самой верхней точкой, это вполне компенсируется тем, что эта ситуация повторяется по всей периферии на 360°, поэтому с точки зрения анализа плоскостности появляющейся погрешностью можно пренебречь. Таким образом, хотя можно предусмотреть устройство, в котором световой источник является регулируемым с регулировкой его радиального положения или его положения вдоль направления оси установки, чтобы регулировать угол падения светового пучка на поверхность кольца, такое условие не является обязательным. Можно предусмотреть устройство, в котором существует только один кольцевой источник, имеющий определенный диаметр и фиксированное положение вдоль направления оси установки. В этом случае диаметр кольцевого светового источника 28 и его положение по направлению оси предпочтительно выбирают таким образом, чтобы удовлетворять вышеупомянутому условию, либо для среднего диаметра поверхности кольца контролируемых емкостей, либо чтобы соответствовать приоритетному диаметру поверхности кольца, соответствующей емкостям, чаще всего контролируемым при помощи устройства. В варианте, чтобы наилучшим образом охватить широкий диапазон диаметров поверхности кольца, можно оснастить устройство несколькими кольцевыми световыми источниками, например, смещенными вдоль направления оси установки и/или имеющими разный диаметр, причем эти различные световые источники можно использовать одновременно или поочередно в зависимости от диаметра поверхности кольца контролируемой емкости.
На фиг. 2А и 2В представлен второй вариант выполнения заявленного устройства, которое содержит первичную поверхность 126 отражения и поверхность 132 углового отражения и которое позволяет осуществлять второй заявленный способ.
Система съемки изображений, включая датчик 18, а также ее система 20 объектива и возможные устройства обработки изображений, визуализации и/или хранения являются идентичными с вариантом выполнения, описанным со ссылками на фиг. 1, и их описание опускается в рамках этого второго варианта выполнения. Точно так же, в обоих вариантах выполнения можно использовать такие же системы освещения, и описание системы освещения опускается, если не считать версии, показанной на фиг. 2В.
В этом втором варианте выполнения, оптическая система 124, расположенная между датчиком 18 и зоной установки, имеет первичную поверхность 126 отражения, которая содержит поверхность вращения, обращенную к оси установки. Эта поверхность вращения расширяется в направлении оси установки и имеет малый диаметр и большой диаметр, прием оба эти диаметра превышают диаметр теоретической поверхности кольца. Таким образом, первичная поверхность 126 отражения может перенаправлять в направлении оси А’1 установки световые лучи, проходящие от реальной поверхности кольца, с углом возвышения наблюдения γ.
В этом втором варианте выполнения устройство содержит между первичной поверхностью 126 отражения и датчиком 18 по меньшей мере одну вторую поверхность отражения. Как показано на фиг. 2А, лучи, отраженные первичной поверхностью 126 отражения, перехватываются поверхностью 132 углового отражения. Поверхность 132 углового отражения расположена в поле зрения датчика, причем это поле зрения определено оптической системой 20 объектива. В данном примере эта поверхность 132 углового отражения содержит поверхность вращения, обращенную противоположно оси А’1 установки, чтобы направлять лучи в сторону датчика.
В этом варианте выполнения, в отличие от первого варианта выполнения, первичная поверхность 126, будучи поверхностью вращения с осью на оси А’1 установки, выполнена с возможностью опосредованного отражения световых лучей, проходящих от реальной поверхности кольца, под углом возвышения наблюдения γ, в направлении датчика 18. Действительно отражение от первичной поверхности 126 является опосредованным, так как после него следует по меньшей мере одно отражение, в данном случае от поверхности132 углового отражения, прежде чем достичь датчика 18.
В представленном варианте выполнения первичная поверхность 126 отражения является участком усеченной конусной поверхности, вогнутой в плоскости, перпендикулярной к оси А’1 установки. Она выполнена, например, на внутренней стороне кольцевого венца 122.
Как и в случае первого варианта выполнения, первичная поверхность 126 отражения может быть не усеченной конусной поверхностью, а расширяющейся поверхностью вращения двойной кривизны, оставаясь при этом вогнутой в плоскости, перпендикулярной к оси А’1 установки.
В представленном варианте выполнения поверхность 132 углового отражения является выпуклой усеченной конусной поверхностью, ось которой находится на оси А’1 установки. Поверхность 132 углового отражения выполнена на наружной поверхности усеченного конуса 134. В представленном примере она имеет малый диаметр и большой диаметр, причем оба меньше диаметра поверхности кольца контролируемой емкости, хотя этот признак и не является обязательным. Большой диаметр находится под малым диаметром. Поверхность 132 углового отражения вписывается в поле зрения датчика 18, определенное системой 20 объектива.
В предпочтительном варианте выполнения траектория лучей между первичной поверхностью 126 отражения и поверхностью 132 углового отражения перпендикулярна или по существу перпендикулярна к оси установки. Такое расположение позволяет значительно снизить чувствительность устройства к возможному дефекту центровки первичной поверхности 126 отражения или поверхности 132 углового отражения. Для этого усеченная конусная поверхность 132 углового отражения имеет делительный угол 45° в вершине и находится на той же высоте вдоль направления оси А’1 установки, что и первичная поверхность 126 отражения. В этом случае первичная поверхность 126 отражения имеет делительный угол α в вершине, равный половине необходимого угла возвышения наблюдения γ. Таким образом, при необходимом угле возвышения наблюдения γ в 15° первичная поверхность 126 отражения имеет конусность с делительным углом α’ в вершине, равным 7,5°, при этом усеченная конусная первичная поверхность 126 отражения расширяется вниз, и ее большой диаметр находится ниже ее малого диаметра вдоль направления оси установки.
Вместе с тем, можно осуществить версию этого второго варианта выполнения, в которой поверхность 132 углового отражения будет усеченной конусной поверхностью, имеющей делительный угол β в вершине менее 45°, например равный 45° минус угол δ (дельта). В этом случае поверхность 132 углового отражения будет расположена выше уровня первичной поверхности 126 отражения, и первичная поверхность 126 отражения будет иметь делительный угол α’ в вершине, равный половине необходимого угла возвышения наблюдения γ минус значение угла δ (Δ). Если полученное значение является отрицательным, это значит, что в отличие от предпочтительных вариантов выполнения первичная поверхность 126 отражения расширяется вверх, и ее больший диаметр расположен над ее меньшим диаметром.
В обоих описанных выше примерах устройств поверхность кольца должна наблюдаться датчиком 18 через оптическую систему 24 или 124 под острым углом возвышения наблюдения γ, то есть под небольшим углом относительно плоскости, перпендикулярной к оси установки, предпочтительно меньшим 25° и даже еще меньшим. Кроме того, в обоих вариантах выполнения поверхность 16 кольца наблюдается «изнутри», то есть лучи наблюдения на их траектории между поверхностью кольца и датчиком направлены в сторону оси установки, когда они отходят от поверхности 16 кольца в направлении первичной поверхности 26, 126 отражения. С другой стороны, эти два варианта выполнения различаются тем, что в первом варианте выполнения первичная поверхность 26 отражения расположена радиально внутри относительно диаметра поверхности кольца, тогда как во втором варианте выполнения первичная поверхность 126 отражения расположена радиально снаружи относительно диаметра поверхности 16 кольца. В первом варианте выполнения луч наблюдения, проходящий от поверхности 16 кольца, перехватывается первичной поверхностью 26 отражения в одной радиальной полуплоскости PRef на коротком пути. Во втором варианте выполнения луч наблюдения, проходящий от поверхности 16 кольца, перехватывается первичной поверхностью 126 отражения в точке, диаметрально противоположной к исходной точке на поверхности кольца на длинном пути, который пересекает ось А’1 установки. При одинаковом угле возвышения наблюдения γ понятно, что необходимое расстояние вдоль направления оси установки между первичной поверхностью 26 или 126 отражения и поверхностью 16 кольца больше в случае второго варианта выполнения, чем в случае первого варианта выполнения.
Во втором варианте выполнения световой источник 28 тоже является кольцевым световым источником 28, диаметр которого больше диаметра поверхности кольца. В представленном примере диаметр кольцевого светового источника 28 больше диаметра кольцевого венца 122, на котором выполнена первичная поверхность 126 отражения. В этом варианте выполнения световой источник 28 расположен по существу на той же высоте по направлению оси установки, что и первичная поверхность 126 отражения. Однако это положение указано исключительно в качестве примера, его можно адаптировать в зависимости от диаметра и осевого положения поверхности кольца контролируемой емкости.
Преимуществом этого второго варианта выполнения является возможность расположения оптической системы 124 на большем расстоянии от поверхности кольца по направлению оси установки.
Следует заметить, что на фиг. 2В показана версия варианта выполнения, показанного на фиг. 2А, которая отличается только тем, что система освещения содержит, кроме кольцевого светового источника 28, отражатель 140, расположенный непосредственно под кольцевым световым источником 28. Этот отражатель имеет в данном случае усеченную конусную поверхность, обращенную в направлении оси установки. Поверхность отражателя 140 расширяется вверх и имеет диаметр, по существу идентичный диаметру светового источника 28. Он отражает по существу вертикальные лучи, излучаемые световым источником 28, в направлении зоны установки под острым углом падения в сторону поверхности кольца. Такой отражатель позволяет сконцентрировать свет, излучаемый световым источником 28, в направлении поверхности кольца под острым углом падения, что соответствует изобретению.
На фиг. 3 схематично представлена оптическая геометрическая трансформация, осуществляемая оптической системой и в данном случае показанная в рамках второго варианта выполнения. Здесь показано отклонение между точкой Т’ реальной поверхности 16 кольца и соответствующей точкой Т теоретической поверхности кольца. В данном примере это отклонение является чисто вертикальным отклонением dZ, то есть расположено только вдоль направления оси установки. Сплошной линией показана траектория (теоретическая) луча наблюдения, проходящего от точки Т теоретической поверхности кольца в направлении фотоэлектрического датчика, и пунктирной линией показана траектория луча наблюдения, проходящего от точки T’ реальной поверхности кольца. Внизу на фиг. 3 показана проекция изображения I, как его видит датчик через оптическую систему, причем это изображение содержит линию I16, иллюстрирующую теоретическое изображение поверхности кольца. Изображение реальной поверхности кольца показано в данном случае в виде линии I16’, которая является изображением, сформированным оптической системой 24 или 124 на датчике 18, отражения падающего пучка от поверхности 16 кольца. Толщина этой линии в радиальном направлении на изображении определена, в частности, геометрической формой, например, плоской, закругленной, в виде перевернутого V, или формой в виде многоугольника профиля поверхности кольца в сечении по радиальной плоскости, протяженностью светового источника в этой же радиальной плоскости и углом светового веера, излучаемого этим источником. Линии L1 и L2 показывают границы поля наблюдения, задаваемые оптической системой, в частности, размером первичной поверхности 126 отражения вдоль направления оси установки. Изображение I16’ реальной поверхности кольца, показанное прерывистой линией, по существу совпадает по всей периферии с теоретическом изображением 116 кольца, показанным сплошной линией. Здесь видно, что в угловом секторе, соответствующем точке T’ поверхности кольца, имеющей локальный дефект, изображение I16’ реальной поверхности кольца отстоит от теоретического изображения I16 кольца и имеет на изображении радиальное смещение изображения dR. Разность высоты dZ вдоль направления оси установки преобразуется в соответствии с оптической геометрической трансформацией, обеспечиваемой оптической системой 124, в радиальное смещение изображения dR на изображении, которое видит датчик.
В представленном примере выполнения это преобразование можно выразить в виде отношения:
dR=dZ*G*cos(γ)
где G = увеличение системы 20 объектива.
Если построить эквивалентную схему, чтобы проиллюстрировать влияние радиального отклонения между реальной поверхностью кольца и теоретической поверхностью кольца, то можно заметить, что влияние этого отклонения на смещение изображения dR является очень незначительным и пропорционально синусу угла возвышения наблюдения γ. Используя угол возвышения наблюдения менее 25° и даже менее 18,43°, можно значительно уменьшить влияние такого радиального отклонения.
Можно заметить, что оптическая геометрическая трансформация, предлагаемая в рамках заявленного способа и осуществляемая при помощи заявленной оптической системы, формирует на датчике полное и сплошное оптическое изображение реальной поверхности кольца. Это полное и сплошное изображение формируется на датчике без цифровой трансформации только за счет оптического процесса, действующего на свет. В представленном примере оптическая система 24 формирует на датчике это полное и сплошное оптическое изображение без цифровой трансформации.
Следует отметить, что наводку оптической системы 24, в частности, при помощи системы 20 объектива, на поверхность 16 кольца производят (с учетом аберраций сильного астигматизма), чтобы совместить поверхность 16 кольца с поверхностью датчика. Световые лучи, которые исходят от источника 18 и отражаются от поверхности 16 кольца, позволяют сформировать изображение поверхности кольца. Они обеспечивают необходимый свет.
Иначе говоря, предпочтительно изображение I16’ поверхности кольца образовано радиальными лучами падающего светового пучка, которые зеркально отражаются от поверхности 16 кольца и направляются на датчик 18 оптической системой 24, включающей в себя, в частности, первичную поверхность 26, 126 отражения. В некоторых вариантах выполнения считается, что изображение I16’ реальной поверхности кольца образовано только радиальным лучами падающего светового пучка, которые зеркально отражаются от поверхности 16 кольца и направляются на датчик 18 оптической системой 24, включающей в себя, в частности, первичную поверхность 26, 126 отражения.
Изображение, получаемое при помощи устройства и способа в соответствии с изобретением, можно использовать в виде визуально просматриваемого изображения. Так, для визуального контроля таких изображений может быть назначен оператор, чтобы отслеживать возможные дефекты поверхности кольца и определять их тип. Действительно, в зависимости от геометрии изображения I16’ реальной поверхности кольца оператор может отличать сугубо локальные дефекты от более обширных дефектов.
В большинстве случаев изображение I16’ поверхности кольца можно уподобить линии и можно определить линию I16’, отображающую изображение поверхности кольца, например, выбрав линию внутреннего или наружного края или срединную линию изображения поверхности кольца в качестве характерной линии.
Теоретическая линия I16, характеризующая теоретическое изображение поверхности кольца, может быть заранее определенной линией, например, окружностью с центром на изображении IA’1 оси установки. Теоретическая линия I16, характеризующая теоретическое изображение поверхности кольца, может быть выведена на основании изображения I16’ поверхности кольца, например, путем вычисления в устройстве обработки изображений, применив для этого изображения цифровое преобразование с целью рассчитать соответствующую теоретическую линию в зависимости от изображения I16’ поверхности кольца.
Исходя из полученного таким образом изображения, заявленный способ может содержать этап определения радиального отклонения изображения между линией I16’, характеризующей изображение поверхности кольца, и теоретической линией I16, характеризующей теоретическое изображение поверхности кольца. Для этого в качестве линии, характеризующей изображение поверхности кольца, можно использовать изображение, формируемое оптической системой 24 или 124 на датчике, отражения падающего пучка от поверхности кольца. Это определение можно осуществлять в заявленном устройстве при помощи устройства обработки изображений, связанного с датчиком 18, включающего в себя, например, компьютер.
На фиг. 4 представлен третий вариант выполнения изобретения, который отличается от первого варианта выполнения только тем, что оптическая система 20 объектива, связанная с датчиком 18, не является телецентрическим объективом, а, например, классическим объективом, эквивалентным объективу, используемому в обычной фотоаппарате или камере, где входной зрачок объектива находится в объективе. В этом случае лучи наблюдения не являются в зоне установки параллельными между собой в радиальной полуплоскости Pr, и, наоборот, являются расходящимися. Таким образом, при одинаковом реальном смещении по высоте dZ наблюдаемое смещение dR варьирует в зависимости от расстояния от кольца до оси A’1. Вследствие этого радиальное смещение оси А1 кольца относительно оси А’1 установки выражается сложным изменением формы реального изображения кольца (не круглая кривая).
Независимо от того, является оптическая система 24, 124 телецентрической или нет, радиальное смещение реальной поверхности кольца относительно оси установки выражается геометрическими деформациями реального изображения кольца. Телецентрическое выполнение уменьшает и упрощает эти деформации.
По отношению к теоретическому изображению поверхности кольца реальное изображение поверхности кольца может объединять несколько деформаций, а именно:
а) деформации, связанные со смещением реальной поверхности кольца относительно теоретической поверхности кольца,
b) деформации, связанные с овализацией реальной поверхности кольца,
c) дефекты, связанные с наклоном реальной поверхности кольца, и
d) деформации, связанные с дефектами плоскостности. Необходимо учитывать, что в силу бокового наблюдения (под острым углом γ) деформации, связанные с дефектами плоскостности, являются максимальными, и другими можно пренебречь. Однако, чтобы повысить точность, система обработки может идентифицировать и/или количественно определять разные деформации.
На фиг. 5А и 5В показаны изображения, которые могут быть получены при помощи устройства или способа в соответствии с изобретением. Такие изображения можно получить непосредственно на датчике 18 посредством простой оптической трансформации через оптическую систему 24, и они содержат изображение I16 реальной поверхности кольца, сплошное по всей своей периферии вокруг изображения IA1 теоретической центральной оси.
На фиг. 5А пунктирной линией показано изображение I16’ реальной поверхности кольца, в котором теоретическая центральная ось А1 совпадает с осью А’1 установки. В этом случае теоретическое изображение I16 кольца, показанное сплошной линией, является идеально круглым изображением, и на нем можно легко идентифицировать радиальное смещение изображения между кривыми I16’ и I16.
На фиг. 5В показано изображение I16’ реальной поверхности кольца, на котором теоретическая центральная ось А1 смещена, например, радиально и/или имеет наклон относительно оси А’1 установки. В этом случае теоретическое изображение I16 кольца не является идеально круглым изображением, а замкнутой кривой, центр которой смещен относительно изображения IA1’ оси установки. Замкнутая кривая I16 имеет, например, по существу вытянутую форму. Для этой замкнутой кривой I16 можно определить изотропный барицентр IA1 и на основании этого изотропного барицентра IA1 определять разность расстояния между точкой изображения I16’ реальной поверхности кольца и соответствующей точкой с такой же угловой координатой на теоретическом изображении I16 кольца. Это расстояние позволяет определить дефект плоскостности. В альтернативном варианте может определить геометрическую трансформацию, позволяющую привести теоретическое изображение I16 к центрованной окружности, и применить эту трансформацию к реальному изображению I16’ кольца, чтобы получить случай, показанный на фиг. 5А, исключив отклонения, связанные с дефектом эксцентричности и/или наклона.
На фиг. 6 показана линия 200 контроля емкостей 14, в которой применено заявленное устройство 10. В представленном примере емкости 14 перемещаются конвейером 210, который переносит емкости 14 в направлении перемещения, например, горизонтальным поступательным движением, перпендикулярным к теоретической центральной оси А1 емкостей 14. В представленном примере конвейер 210 содержит конвейерную ленту 212, на которой емкости 14 установлены своей поверхностью дна и которую называют также плоскостью опоры, при этом их теоретическая центральная ось А1 расположена вертикально. Конвейер может содержать конвейерное колесо, перемещающее емкости 14 по круговой траектории перемещения, в частности, в горизонтальной плоскости. Конвейер 210 может также содержать направляюще средства (не показаны), взаимодействующие с боковыми сторонами емкостей 14. Таким образом, поверхность 16 кольца емкостей 14 находится в их горизонтальной плоскости, обращенной вверх. Конвейер 210 доставляет емкости по горизонтальной траектории под заявленное устройство 10 без риска столкновения с устройством 10. Устройство 10 может содержать корпус 230, в котором находятся, в частности, датчик 18, система 20 объектива и первичная поверхность 126 отражения и, возможно, поверхность 132 углового отражения, как показано на фиг. 6. Корпус 230 расположен над конвейером. Внутри корпуса 230 ось А’1 установки заявленного устройства находится в вертикальном положении таким образом, что поле наблюдения и падающий световой пучок ориентированы вниз в сторону зоны Z установки, которая находится между нижней стороной корпуса 230 и конвейерной лентой 212. Понятно, что на уровне этого поста конвейер 210 перемещает емкости таким образом, чтобы их теоретическая центральная ось А1 максимально совместилась с осью А’1 установки. В момент этого совмещения при помощи устройства 10 снимают изображение, причем это не требует ни манипулирования емкостью, ни остановки конвейера. Затем изображение, снятое устройством 10, можно направить в систему 240 обработки, например, устройство обработки изображений и/или устройство визуализации и/или устройство хранения изображений, например, информативную систему, содержащую компьютер. В этом случае можно анализировать снятое изображение и идентифицировать и даже количественно характеризовать на этом изображении возможный дефект плоскостности поверхности 16 кольца емкости 14.
Таким образом, устройство не входит в физический контакт с контролируемой емкостью. Заявленное устройство является менее дорогим и имеет меньший габарит, чем известные устройства, что позволяет, в частности, легко установить его на посту или на линии контроля изделий, при этом пост или линия могут содержать другие устройства, предназначенные для контроля других объектов, и пост или линию контроля можно расположить на производственной линии, где емкости движутся непрерывно. Такое устройство обеспечивает контроль емкостей в режиме он-лайн как на линии производства емкостей, так и на линии обработки емкостей или на линии розлива.
Заявленные устройство и способ можно применять только с одним двухмерным датчиком, например, только с одной камерой, но можно иметь при этом информацию о плоскостности всей поверхности кольца на основании одного двухмерного оптического изображения, напрямую снимаемого датчиком, а не на основании нескольких раздельно снимаемых оптических изображений.
Заявленная система наблюдения представлена в данном случае в предпочтительных вариантах выполнения, в которых отражающие поверхности являются зеркалами. Такие же результаты можно получить, используя оптические элементы типа призм, например, тоже имеющие конические поверхности, обеспечивающие полные отражения. В рамках изобретения оптический элемент может содержать линзу Френеля. Такие средства позволяют производить наблюдение с теми же значениями угла γ, и при помощи этих средств можно предусматривать телецентрические или не телецентрические наблюдения.
Изобретение не ограничивается описанными и показанными на фигурах примерами и в него можно вносить различные изменения, не выходя за его рамки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОСТ И СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В ВИДЕ ПОСЕЧКИ НА СТЕКЛЯННЫХ СОСУДАХ ПРИ ПОСТУПАТЕЛЬНОМ ДВИЖЕНИИ | 2021 |
|
RU2820268C1 |
| ЛИНИЯ КОНТРОЛЯ ПУСТЫХ СТЕКЛЯННЫХ ЕМКОСТЕЙ | 2020 |
|
RU2800540C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ СТЕНКИ ЕМКОСТИ | 2013 |
|
RU2642165C2 |
| Приспособление для отыскания невидимых невооруженным глазом летательных аппаратов | 1925 |
|
SU9343A1 |
| ОПТИЧЕСКАЯ ПРОВЕРКА НАКЛОНА КОНТЕЙНЕРОВ | 2005 |
|
RU2370756C2 |
| УЧЕБНЫЙ ОПТИЧЕСКИЙ ИНТЕРФЕРОМЕТР | 1998 |
|
RU2154307C2 |
| ПОРТАТИВНЫЙ ПРИБОР КОНТРОЛЯ И ИЗМЕРЕНИЯ ВОЗВРАТНО-ОТРАЖАЮЩЕЙ СПОСОБНОСТИ СВЕТОВОЗВРАЩАЮЩИХ ИЗДЕЛИЙ | 2005 |
|
RU2302624C2 |
| ДИНАМИЧЕСКИЙ ДИСПЛЕЙ ПОЛНОСТЬЮ ОБЪЕМНОГО ИЗОБРАЖЕНИЯ | 2017 |
|
RU2727853C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| БЛОК ДАТЧИКА ДЛЯ КОНТРОЛЯ ПОВЕРХНОСТИ ОБЪЕКТА И СПОСОБ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО КОНТРОЛЯ | 1998 |
|
RU2186372C2 |
Изобретение относится к области контроля емкостей, в частности стеклянных емкостей, и, в частности, к контролю плоскостности поверхности кольца таких емкостей. Заявлен способ визуального контроля плоскостности поверхности кольца емкости, в котором освещают поверхность кольца при помощи периферического падающего светового пучка, содержащего радиальные световые лучи, с зеркальным отражением от поверхности кольца, при помощи оптической системы; формируют плоское изображение поверхности кольца емкости на датчике с оптической геометрической трансформацией, которая преобразует реальную разность высоты (dZ) в радиальное смещение (dR) на изображении, и радиальное смещение (dR) изображения, соответствующее унитарной реальной разности высоты (dZ), превышает радиальное смещение изображения, соответствующее реальному радиальному смещению этого же размера. Объектами изобретения являются также устройство и установка, на которых осуществляют такой способ. Технический результат – упрощение конструкции, уменьшение габаритов, а также обеспечение контроля емкостей в режиме онлайн как на линии производства емкостей, так и на линии обработки емкостей или на линии розлива. 4 н. и 23 з.п. ф-лы, 6 ил.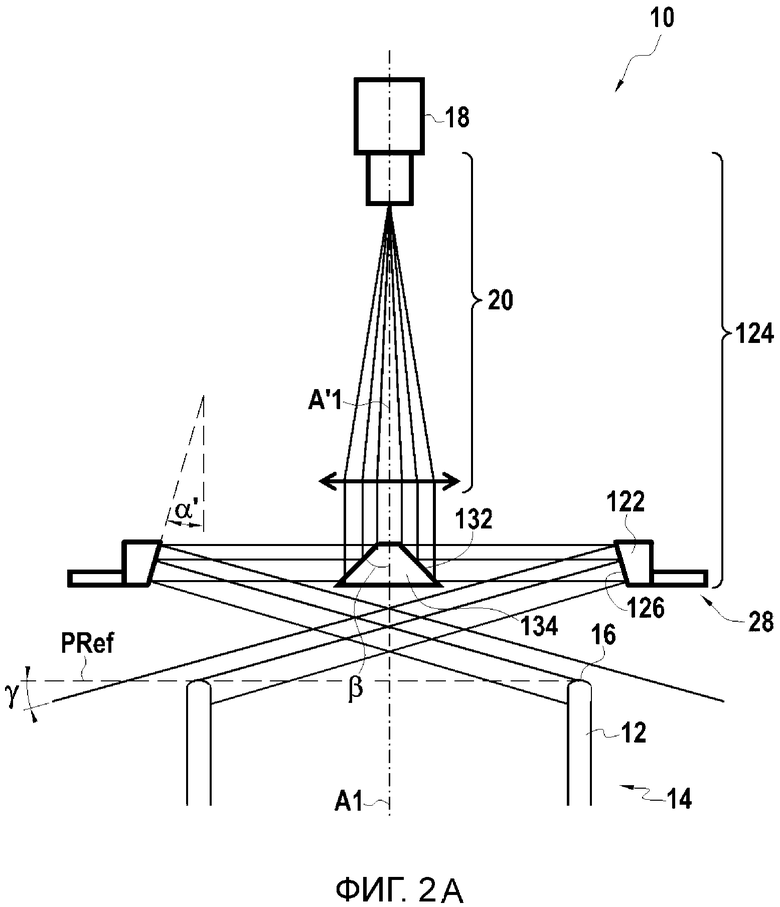
1. Способ визуального контроля плоскостности реальной поверхности (16) кольца емкости (14), при этом поверхность кольца имеет теоретическую плоскую и кольцевую или круглую геометрию вокруг теоретической центральной оси (А1), причем способ содержит этапы, на которых:
освещают реальную поверхность (16) кольца при помощи периферического падающего светового пучка,
при помощи оптической системы (24, 124) формируют плоское изображение поверхности кольца емкости на двухмерном фотоэлектрическом датчике (18),
при этом:
периферический падающий световой пучок содержит радиальные световые лучи, содержащиеся в радиальной плоскости, содержащей теоретическую центральную ось (А1), при этом указанные радиальные лучи направлены к теоретической центральной оси (А1);
периферический падающий световой пучок освещает поверхность (16) кольца сверху, и радиальные лучи падающего светового пучка отражаются посредством зеркального отражения от поверхности (16) кольца,
этап формирования плоского изображения включает в себя оптическую геометрическую трансформацию, при которой преобразуют реальную поверхность (16) кольца в изображение (I16’) поверхности кольца, причем при этой трансформации преобразуют теоретическую поверхность кольца в теоретическое изображение (I16) поверхности кольца,
причем при оптической геометрической трансформации преобразуют реальную разность высоты (dZ) по направлению теоретической центральной оси (A1) между рассматриваемой точкой (T’) реальной поверхности (16) кольца и соответствующей точкой (T) теоретической поверхности кольца в радиальное смещение (dR) на изображении точки изображения (IT’) поверхности кольца емкости по отношению к соответствующей точке изображения (IT) теоретического изображения поверхности кольца;
причем на плоском изображении радиальное смещение (dR) изображения, соответствующее унитарной реальной разности высоты (dZ), превышает радиальное смещение изображения, соответствующее реальному радиальному смещению этого же размера между указанной рассматриваемой точкой (T’) реальной поверхности кольца и соответствующей точкой (Т) теоретической поверхности кольца.
2. Способ визуального контроля по п. 1, в котором радиальное смещение изображения (dR), соответствующее унитарной реальной разности высоты (dZ), по меньшей мере в три раза превышает реальное радиальное смещение изображения, соответствующее реальному радиальному смещению этого же размера между рассматриваемой точкой реальной поверхности кольца и соответствующей точкой на теоретической поверхности кольца.
3. Способ визуального контроля по п. 1 или 2, содержащий этап, на котором наблюдают реальную поверхность (16) кольца при помощи оптической системы (24, 124) под углом возвышения наблюдения (γ) менее 25° относительно плоскости, перпендикулярной к теоретической центральной оси (А1).
4. Способ визуального контроля по п. 1, содержащий этап, на котором наблюдают реальную поверхность кольца (16) при помощи оптической системы (24, 124) под углом возвышения наблюдения (γ) менее 18,43° относительно плоскости, перпендикулярной к теоретической центральной оси (А1).
5. Способ визуального контроля по любому из пп. 1-4, в котором оптическая система (24, 124) определяет периферическое поле наблюдения, которое наблюдает поверхность (16) кольца посредством радиальных лучей наблюдения, которые содержатся в радиальной плоскости, содержащей теоретическую центральную ось (А1), и которые образуют теоретический центральный угол менее 25° относительно плоскости, перпендикулярной к теоретической центральной оси (А1).
6. Способ визуального контроля по п. 5, в котором угол возвышения наблюдения меньше 18,43° относительно плоскости, перпендикулярной к теоретической центральной оси.
7. Способ визуального контроля по любому из пп. 3-6, в котором оптическая система (24, 124) содержит первичную поверхность (26, 126) отражения, при этом первичная поверхность (26, 126) отражения является поверхностью вращения с осью на теоретической центральной оси (А1), выполненной с возможностью непосредственного или опосредованного отражения световых лучей, проходящих от реальной поверхности кольца под углом возвышения наблюдения, в направлении датчика.
8. Способ визуального контроля по любому из пп. 1-7, в котором на этапе формирования плоского изображения (I) оптически формируют полное и сплошное двумерное изображение (I16’) реальной поверхности (16) кольца.
9. Способ визуального контроля по любому из пп. 1-8, в котором в одной радиальной плоскости периферический падающий световой пучок содержит непараллельные радиальные лучи.
10. Способ визуального контроля по любому из пп. 1-9, в котором падающий пучок освещает поверхность кольца под таким углом падения, при котором в точке отражения падающего луча его луч, отраженный реальной поверхностью (16) кольца, наблюдается датчиком, и нормаль (“n”) к поверхности (16) кольца образует угол менее 30° относительно направления теоретической центральной оси (А1).
11. Способ определения плоскостности реальной поверхности (16) кольца емкости (14), при этом поверхность (16) кольца имеет плоскую и кольцевую теоретическую геометрию вокруг теоретической центральной оси (А1), причем способ включает в себя способ визуального контроля по любому из пп. 1-10 и содержит этап, на котором определяют радиальное смещение (dR) изображения между линией (I16’), характеризующей изображение поверхности (16) кольца, и теоретической линией (I16), характеризующей теоретическое изображение поверхности кольца.
12. Способ определения по п. 11, в котором линия (I16), характеризующая изображение поверхности кольца, является изображением отражения падающего пучка от поверхности (16) кольца, формируемым оптической системой (24, 124) на датчике.
13. Устройство визуального контроля плоскостности реальной поверхности (16) кольца емкости (14), при этом поверхность кольца имеет плоскую и кольцевую или круглую теоретическую геометрию вокруг теоретической центральной оси (А1), при этом устройство (10) имеет зону установки емкости, причем зона установки имеет ось (А’1) установки, при этом устройство содержит:
систему (28, 140) освещения, выполненную с возможностью излучать периферический падающий световой пучок, содержащий радиальные лучи, содержащиеся в радиальной плоскости, содержащей ось (А’1) установки, при этом указанные радиальные лучи направлены к оси (А’1) установки,
двумерный фотоэлектрический датчик (18),
оптическую систему (24, 124), расположенную между зоной установки емкости и датчиком (18) и выполненную с возможностью формирования на датчике (18) изображения (I16’) поверхности (16) кольца емкости (14), находящейся в зоне установки,
при этом система (28, 140) освещения, датчик (18) и оптическая система (24, 124) расположены над зоной установки,
оптическая система (24, 124) определяет периферическое поле наблюдения, которое наблюдает поверхность (16) кольца посредством радиальных лучей наблюдения, которые содержатся в радиальной плоскости, содержащей ось (А’1) установки, и которые образуют угол возвышения наблюдения менее 25° относительно плоскости, перпендикулярной к оси (А’1) установки, и
система освещения содержит световой источник (28) с осью на оси (А’1) установки, имеющий диаметр, превышающий диаметр поверхности (16) кольца.
14. Устройство по п. 13, содержащее единственный двухмерный фотоэлектрический датчик (18), на котором формируется полное и сплошное изображение (I16’) реальной поверхности (16) кольца.
15. Устройство по п. 13 или 14, содержащее первичную поверхность (26, 126) отражения, при этом первичная поверхность (26, 126) отражения является поверхностью вращения с осью на оси (А’1) установки, выполненной с возможностью непосредственного или опосредованного отражения световых лучей, проходящих от реальной поверхности (16) кольца под углом возвышения наблюдения, в направлении датчика (18).
16. Устройство по п. 15, в котором первичная поверхность (126) отражения выполнена с возможностью отражать опосредованно световые лучи в направлении датчика (18), при этом устройство содержит между первичной поверхностью (126) отражения и датчиком (18) по меньшей мере одну вторую поверхность (132) отражения.
17. Устройство по п. 15, в котором первичная поверхность (26) отражения содержит поверхность вращения, обращенную противоположно оси установки и имеющую малый диаметр и большой диаметр, причем оба диаметра меньше наименьшего диаметра теоретической поверхности кольца.
18. Устройство по п. 17, в котором первичная поверхность (26) отражения является выпуклой усеченной конусной поверхностью и имеет половинный угол (α) в вершине, равный 45° минус половина угла возвышения наблюдения (γ).
19. Устройство по п. 15 или 16, в котором первичная поверхность (126) отражения содержит поверхность вращения, обращенную к оси (А’1) установки и имеющую малый диаметр и большой диаметр, причем оба диаметра больше наибольшего диаметра теоретической поверхности кольца, с тем чтобы отражать в направлении оси (А’1) установки световые лучи, проходящие от реальной поверхности (16) кольца, под углом возвышения наблюдения (γ), при этом указанные лучи перехватываются поверхностью (132) обратного отражения, которая содержит поверхность (132) вращения, обращенную противоположно оси (А’1) установки, с тем чтобы отражать лучи в направлении датчика (18).
20. Устройство по любому из пп. 16 или 19, в котором траектория лучей между первичной поверхностью (126) отражения и поверхностью (132) обратного отражения перпендикулярна к оси (А’1) установки.
21. Устройство по п. 20, в котором поверхность (132) обратного отражения содержит выпуклую усеченную конусную поверхность вращения с осью на оси (А’1) установки и с половинным углом (β) в вершине, равным 45°.
22. Устройство по любому из пп. 19-21, содержащее между датчиком (18) и первичной поверхностью (126) отражения телецентрическую оптическую систему (20).
23. Устройство по любому из пп. 13-22, в котором в одной радиальной плоскости (Pr) периферический падающий пучок содержит непараллельные радиальные лучи.
24. Устройство по любому из пп. 13-23, в котором световой источник (28) является кольцевым источником в виде тела вращения с осью на оси (А’1) установки.
25. Устройство по любому из пп. 13-24, содержащее корпус (230), в котором находятся датчик (18), система (20) объектива, первичная поверхность (126) отражения и, возможно, поверхность (32) обратного отражения.
26. Линия (200) контроля емкостей (14), имеющих поверхность (16) кольца, в которой емкости (14) выполнены с возможностью перемещаться на конвейерной линии при помощи конвейера (210), который переносит емкости (14) в горизонтальном направлении перемещения, перпендикулярном к теоретической центральной оси (А1) емкостей (14), которые имеют, таким образом, обращенную вверх поверхность (16) кольца в горизонтальной плоскости, при этом установка содержит устройство (10) по любому из пп. 13-25, которое расположено на установке с осью (А’1) установки в вертикальном положении так, что поле наблюдения и падающий световой пучок ориентированы вниз к зоне (Z) установки, которая находится между устройством и транспортировочным элементом (212) конвейера.
27. Линия (200) контроля по п. 26, в которой конвейер (210) выполнен с возможностью перемещать емкости так, чтобы их теоретическая центральная ось (А1) совместилась с осью (А’1) установки, и в момент этого совмещения при помощи устройства (10) осуществляется съемка изображения без контакта устройства (10) с емкостью (14).
| ОСВЕТИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ПОВЕРХНОСТИ ГОРЛОВИНЫ ЕМКОСТИ | 2005 |
|
RU2397477C2 |
| DE 2916361 A, 06.11.1980 | |||
| US 4606635 A1, 19.08.1986 | |||
| Диагностическое средство для гинекологических исследований | 1976 |
|
SU657732A3 |
| US 4026414 A1, 31.05.1977 | |||
| US 4454542 A1, 12.06.1984. | |||

