Настоящее изобретение относится к способу установления значения, по меньшей мере, одного параметра состояния рельсового транспортного средства и/или пути рельсового транспортного средства, в котором на, по меньшей мере, одном этапе регистрации получают коррелирующий с текущим значением параметра состояния текущий первый сигнал регистрации с помощью первого датчика сигналов на конструкции внутри рельсового транспортного средства, причем для получения текущего первого сигнала регистрации используют первый датчик сигналов мобильного оконечного устройства. Настоящее изобретение относится также к соответствующей системе, а также к соответствующему мобильному оконечному устройству для установления значения такого параметра состояния.
В случае рельсовых транспортных средств из соображений техники безопасности, а также не в последнюю очередь на основании постоянных требований к снижению стоимости, как правило, требуется по возможности заблаговременно или своевременно распознавать повреждения или износ компонентов транспортного средства и предпринимать соответствующие меры с тем, чтобы предотвратить опасность для пассажиров или окружающей среды. То же самое справедливо для используемой инфраструктуры. По этой причине современные рельсовые транспортные средства зачастую оснащают соответствующими фирменными датчиками, измеряющими сигналы в транспортном средстве, на основании которых может быть получено текущее значение определенных параметров состояния транспортного средства, которые, в свою очередь, являются характерными для определенного состояния транспортного средства (как правило, определенное состояние одного или нескольких компонентов транспортного средства).
Таким образом, как правило, на основании конкретных моделей колебаний конструкции транспортного средства можно сделать выводы о типе повреждения, возможно, даже степени повреждения, определенных подвижных и приводных компонентов транспортного средства. Так, например, определенные образцы колебаний в транспортном средстве указывают на определенные повреждения ротора двигателя, коробки передач, вала и/или колеса транспортного средства и т.д.
При этом проблема заключается в том, что фирменные блоки датчиков, до сих пор используемые для получения данных, являются относительно дорогими и сложными для изготовления, так что они не в последнюю очередь по экономическим причинам не подходят для широкого использования.
Из патента DE 10 2012 014 331 A1 известен общий способ определения качества пути, в котором с помощью датчиков ускорения мобильного оконечного устройства, например, так называемого смартфона измеряют только вертикальные ускорения, действующие на транспортное средство. Этот способ, однако, позволяет сделать лишь относительно грубые выводы о состоянии пути (например, о выбоинах и т.п.), но не о повреждениях компонентов транспортного средства или более детальных или более сложных повреждениях инфраструктуры.
Задача настоящего изобретения заключается в создании таких способа и системы, а также мобильного оконечного устройства вышеназванного типа, которые бы не имели вышеуказанных проблем или, по крайней мере, имели их в меньшей степени, и, в частности, обеспечивался простой способ достоверного и малозатратного установления текущих значений соответствующих параметров состояния рельсового транспортного средства или проезжаемого пути, на основании которых можно сделать выводы о текущем состоянии износа или повреждениях транспортного средства или пути.
В настоящем изобретении эта задача решается с помощью способа в соответствии с ограничительной частью пункта 1 формулы изобретения с помощью признаков, указанных в отличительной части пункта 1 формулы изобретения. Кроме того, эта задача решается посредством системы согласно ограничительной части пункта 12 с помощью признаков, указанных в отличительной части пункта 12. Кроме того задача решается с помощью мобильного оконечного устройства в соответствии с ограничительной частью пункта 15 с помощью признаков, указанных в отличительной части пункта 15.
Настоящее изобретение основано на техническом принципе, который позволяет надежным и экономически эффективным способом определять текущие значения соответствующих параметров состояния рельсового транспортного средства или пути, на основании которых можно сделать выводы о текущем состоянии износа или повреждения состояния транспортного средства или пути, когда для установления значения, по меньшей мере, одного параметра состояния анализируют более высокий частотный диапазон сигнала регистрации, в частности, множество различных сигналов регистрации. Так, было показано, что внутренние датчики таких сигналов мобильных оконечных устройств генерируются с достаточной разрешающей способностью по частоте, которая позволяет выполнять анализ на более высокой частоте в диапазоне выше 1 Гц до 2 Гц, предпочтительно выше 4 Гц.
Как раз в этих диапазонах более высоких частот находятся системные отклики транспортного средства (например, механические и/или акустические колебания), которые являются значимыми для анализа состояния износа или повреждения состояния транспортного средства или пути. При этом здесь понимается, что, в зависимости от заинтересованного компонента транспортного средства или в зависимости от заинтересованного аспекта пути или в зависимости от заинтересованного колебательного возбуждения или в зависимости от используемого типа приемника сигнала можно наблюдать или анализировать различные диапазоны частот.
Так, как правило, при анализе вибрации компонентов, возбуждение вибрации которых происходит с помощью вращающихся компонентов транспортного средства, может быть рассмотрена соответствующая частота вращения вызывающих колебания компонента(-ов) и, при необходимости, их гармоника. Разумеется, роль в анализе играет также соответствующий полезный диапазон частот используемого приемника сигнала.
Так, при анализе вибрации компонентов подвески шасси, как правило, выбирают диапазоны частот от 1 Гц до 10 Гц, предпочтительно от 1 Гц до 4 Гц, более предпочтительно от 1 Гц до 2 Гц. При механическом анализе вибрации компонентов шасси или трансмиссии или вибрирующих в результате ее структурных компонентов кузова транспортного средства, как правило, выбирают диапазоны частот от 2 до 50 Гц, предпочтительно от 4 до 40 Гц, более предпочтительно от 5 Гц до 30 Гц. При акустическом анализе, с другой стороны, как правило, выбирают диапазоны частот от 10 Гц до 20 кГц, предпочтительно от 50 Гц до 10 кГц, более предпочтительно от 100 Гц до 1 кГц.
Кроме того, такие мобильные оконечные устройства, как правило, обеспечивают одновременный сбор нескольких различных сигналов (например, сигналов ускорения, сигналов вращения, акустических сигналов и т.д.), комплексный анализ которых позволяет более точно оценить состояние износа или повреждения транспортного средства или пути.
Кроме того, в этом случае также подразумевается, что приемник сигнала не обязательно должен быть внутренним датчиком мобильного оконечного устройства. Скорее, это может быть также внешний датчик, который (временно или постоянно) соединен с мобильным оконечным устройством (проводным и/или беспроводным), с целью генерации упомянутого сигнала регистрации.
Согласно одному из аспектов, изобретение относится к способу установления значения, по меньшей мере, одного параметра состояния рельсового транспортного средства и/или пройденного пути рельсового транспортного средства, в котором, по меньшей мере, на одном этапе регистрации определяют, по меньшей мере, один коррелирующий с текущим значением параметра состояния текущий первый сигнал регистрации с помощью первого приемника сигнала на конструкции внутри рельсового транспортного средства, причем для измерения текущего первого сигнала регистрации используется первый приемник сигнала мобильного оконечного устройства. Для установления значения, по меньшей мере, одного параметра состояния анализируют частотный диапазон первого текущего сигнала регистрации выше 1 Гц до 2 Гц, предпочтительно от 4 Гц до 15 кГц, наиболее предпочтительно от 10 Гц до 1 кГц.
В качестве мобильного оконечного устройства в принципе может использоваться любое мобильное оконечное устройство, которое содержит, по меньшей мере, подобный подходящий приемник сигналов. Мобильный телефон, в частности, смартфон или планшетный компьютер или мобильное навигационное устройство или умные часы являются предпочтительными в качестве мобильного оконечного устройства. Это позволяет обеспечить особенно экономически эффективные решения.
В принципе, можно использовать любые приемники сигналов, сигналы которых позволяют сделать выводы о текущем состоянии износа или повреждения транспортного средства или пути при достаточно высокой частотной избирательности. Особенно простые решения со значимыми результатами установления текущего состояния износа или повреждения могут быть достигнуты, когда в качестве датчика сигнала используется, по меньшей мере, один датчик ускорения мобильного оконечного устройства и/или, по меньшей мере, один датчик вращения мобильного оконечного устройства и/или, по меньшей мере, один микрофон мобильного оконечного устройства и/или, по меньшей мере, одна камера мобильного оконечного устройства и/или, по меньшей мере, датчик температуры мобильного оконечного устройства и/или, по меньшей мере, датчик магнитного поля мобильного оконечного устройства. В каждом отдельном случае это может быть либо внутренний датчик мобильного оконечного устройства, либо внешний датчик (временный или постоянный), подключенный (проводным и/или беспроводным способом) к соответствующему мобильному оконечному устройству для генерации соответствующего сигнала регистрации.
В качестве конструкции внутри транспортного средства, с которой снимают или получают соответствующий сигнал, в принципе, подходит любая конструкция внутри транспортного средства, с которой в достаточной степени известно соединение по сигналу (а следовательно, и функция передачи), либо между конструкцией и компонентом транспортного средства (для анализа состояния) или пути. Предпочтительно, структура внутри транспортного средства представляет собой устройство хранения, в частности, багажную полку и/или стол и/или лоток сиденья и/или, в частности, запирающийся ящик транспортного средства, при этом на этапе регистрации мобильное оконечное устройство подключают к устройству хранения, в частности, кладут на устройство хранения. Дополнительно или в качестве альтернативы, конструкция внутри транспортного средства может быть конструкцией стены, в частности, боковой стеной, причем мобильное оконечное устройство соединяется с конструкцией стены на этапе регистрации.
Дополнительно или в качестве альтернативы мобильное оконечное устройство на этапе регистрации может быть жестко, в частности, неподвижно соединено с конструкцией внутри транспортного средства, в результате чего обеспечивается, в частности, в достаточной степени определенная передача сигнала или функции передачи между конструкцией и мобильным оконечным устройством. Дополнительно или в качестве альтернативы мобильное оконечное устройство на этапе регистрации может быть соединено с конструкцией внутри транспортного средства с помощью зажимного устройства, чтобы обеспечить, в частности, в достаточной степени определенную передачу сигнала или функцию передачи между конструкцией и мобильным оконечным устройством.
Дополнительно или в качестве альтернативы мобильное оконечное устройство на этапе регистрации может быть соединено с конструкцией внутри транспортного средства с помощью держателя. При этом держатель может быть размещен в любом подходящем месте внутри транспортного средства. Например, он может быть размещен в зоне стола или сиденья транспортного средства. В дополнительных вариантах исполнения изобретения держатель может быть размещен в ящике транспортного средства, причем ящик предпочтительно запирается. Особенно благоприятным является, когда держатель пространственно соотносится с зарядным устройством оконечного мобильного устройства. При этом особенно удобно, а следовательно, предпочтительно, когда речь идет о (например индуктивном) зарядном устройстве, которое при необходимости обеспечивает беспроводную зарядку аккумулятора оконечного мобильного устройства.
Для анализа текущего состояния износа или повреждения соответствующей системы в целом может быть достаточно, проанализировать ряд измерений, полученных на этапе регистрации. При этом речь, например, может идти о таких измерениях, которые были получены при одном прогоне по определенному участку пути.
В особенно предпочтительных вариантах способа в соответствии с изобретением может быть получено и использовано для анализа несколько рядов измерений. В этих случаях мобильное оконечное устройство может в принципе быть постоянно соединено с конструкцией внутри транспортного средства в том же измерительном положении и/или направлении. Чтобы получить достоверные результаты или снизить риск нераспознанных сбоев отдельных датчиков, может быть также предусмотрено, что на первом этапе регистрации при первом прогоне по задаваемому участку пути мобильное оконечное устройство соединено с конструкцией внутри транспортного средства в задаваемом первом измерительном положении и/или направлении, а на втором этапе регистрации при втором прогоне по задаваемому участку пути мобильное оконечное устройство соединено с конструкцией внутри транспортного средства в задаваемом втором измерительном положении и/или направлении.
В дополнительных предпочтительных вариантах исполнения изобретения на этапе установления получают значение, по меньшей мере, одного параметра состояния с использованием текущего первого сигнала регистрации из, по меньшей мере, одного предыдущего этапа регистрации. При этом на этапе установления значение, по меньшей мере, одного параметра состояния получают, в частности, с применением текущих первых сигналов регистрации из множества предыдущих этапов регистрации. Тем самым можно удобным образом учитывать при анализе историю сигналов регистрации, а, следовательно, состояние износа или повреждения заинтересованной системы.
В предпочтительных вариантах исполнения изобретения при анализе состояния износа или повреждения заинтересованной системы выполняют сравнение между в достаточной степени известным предыдущим состоянием и текущим состоянием, которое получают на основании текущих измерений, поскольку этим самым можно сделать особенно надежные выводы об изменении состояния соответствующих механизмов изнашивания или повреждения.
Эталонное состояние в принципе можно получить любым способом, в частности, вычислительным и/или с помощью соответствующих сравнительных измерений в самом транспортном средстве или эталонном транспортном средстве.
В определенных вариантах исполнения изобретения значение, по меньшей мере, одного параметра состояния на этапе установления получают с помощью, по меньшей мере, одного эталонного сигнала регистрации на основании, по меньшей мере, одного предыдущего эталонного этапа регистрации. При этом значение, по меньшей мере, одного параметра состояния на этапе установления может быть получено, в частности, с помощью текущих первых сигналов регистрации из множества предыдущих этапов регистрации и множества эталонных сигналов регистрации из множества предыдущих эталонных этапов регистрации.
Дополнительно или альтернативно может быть предусмотрено, что, по меньшей мере, один эталонный этап регистрации выполняется непосредственно в транспортном средстве или в эталонном транспортном средстве, по меньшей мере, того же типа. Дополнительно или альтернативно может быть предусмотрено, что, по меньшей мере, один эталонный этап регистрации был выполнен в транспортном средстве в известном состоянии, в частности, в новом состоянии или состоянии технического обслуживания, в котором известно определенное значение, по меньшей мере, одного параметра состояния.
В других вариантах исполнения изобретения значение, по меньшей мере, одного параметра состояния на этапе установления можно получить с помощью, по меньшей мере, одного эталонного значения, которое, в свою очередь, получают на основании эталонной модели транспортного средства. При этом может быть предусмотрено, что эталонная модель, в частности, позволяет получить, по меньшей мере, одно ожидаемое значение первого сигнала регистрации на момент регистрации, по меньшей мере, одного текущего первого текущего сигнала регистрации.
Как уже было упомянуто, особенно подходящие мобильные оконечные устройства позволяют осуществлять одновременное получение различных сигналов регистрации, благодаря чему становится возможен достоверный анализ состояния износа или повреждения заинтересованной системы. При этом предпочтительно предусмотрено, что, по меньшей мере, на одном этапе регистрации с рельсового транспортного средства получают, по меньшей мере, один текущий второй сигнал регистрации, коррелирующий с текущим значением, по меньшей мере, одного параметра состояния, с помощью второго датчика сигналов, и на этапе установления получают значение, по меньшей мере, одного параметра состояния с использованием текущего первого сигнала регистрации и текущего второго сигнала регистрации из, по меньшей мере, одного предыдущего этапа регистрации, в частности, из множества предыдущих этапов регистрации.
Здесь может быть предусмотрено, что для регистрации текущего второго сигнала регистрации используют второй датчик сигналов мобильного оконечного устройства. Дополнительно или альтернативно для установления значения, по меньшей мере, одного параметра состояния анализируют, в частности, частотный диапазон текущего второго сигнала регистрации выше от 1 до 2 Гц, предпочтительно от 4 Гц до 15 кГц, наиболее предпочтительно от 10 Гц до 1 кГц, с тем, чтобы рассматривать информативные диапазоны частот.
В принципе для первого и второго сигналов регистрации могут использоваться различные частоты или диапазоны частот, особенно в зависимости от того, в каком диапазоне частот износ или повреждение влияет на соответствующий сигнал регистрации. Однако в определенных вариантах исполнения изобретения для установления значения, по меньшей мере, одного параметра состояния может анализироваться по существу одинаковый частотный диапазон первого и второго сигналов регистрации.
В принципе могут анализироваться любые комбинации сигналов регистрации. Особенно информативные результаты получают однако в тех случаях, когда в качестве первого датчика сигналов используют, по меньшей мере, один датчик ускорения и/или, по меньшей мере, один датчик вращения мобильного оконечного устройства; а в качестве второго датчика сигналов используют, по меньшей мере, один микрофон мобильного оконечного устройства. Именно такое комбинированное наблюдение механических и акустических колебаний позволяет сделать достоверные выводы о текущем состоянии износа или повреждения
Под анализируемым параметром состояния понимается, как правило, любой параметр состояния, который позволяет сделать необходимые выводы о состоянии износа или повреждения заинтересованной системы. При этом предметом анализа могут быть любые системы. Предпочтительно значимое значение, по меньшей мере, одного параметра состояния, а, следовательно, состояния, в частности, состояния износа и/или исправности, по меньшей мере, одного компонента транспортного средства, при этом в качестве компонента транспортного средства может выступать, в частности, компонент шасси транспортного средства и/или компонент приводного механизма транспортного средства и/или компонент вспомогательного рабочего устройства транспортного средства, в частности, кондиционер и/или компрессор транспортного средства.
В предпочтительных вариантах осуществления изобретения, первый сигнал регистрации может быть сохранен вместе с отражающим момент его регистрации идентификатором времени и/или с отражающим текущее положение транспортного средства и/или мобильного оконечного устройства идентификатором положения и/или, по меньшей мере, одним значением эксплуатационных данных, в частности, отражающим эксплуатационный режим транспортного средства, в частности, текущую скорость транспортного средства, и/или с идентификатором транспортного средства, в частности, одноразового и уникального идентификатора транспортного средства и/или с отражающими положение оконечного устройства внутри транспортного средства во время этапа регистрации данными о положении измерения. Таким образом обеспечивается предпочтительная возможность добавить в анализ соответствующую информацию о времени или о местоположении или информации о состоянии эксплуатации или идентификации транспортного средства или информации об измерительном положении. Это особенно полезно в тех случаях, когда анализируют несколько следующих друг за другом по времени серий измерений. В частности, идентификатор транспортного средства позволяет быстро соотнести сигнал регистрации и соответствующее транспортное средство, в то время как информация об измерительном положении необходима, чтобы сделать выводы о передаче сигнала или передаточной функции между конструкцией и мобильным оконечным устройством, что в целом обеспечивает более точный анализ.
В определенных вариантах осуществления изобретения значение, по меньшей мере, одного параметра состояния, следовательно, может быть установлено на этапе установления с использованием идентификатора положения и отражающей состояние пройденного пути информации о пути. Это дает то преимущество, что с помощью информации о пути можно оценить и принять во внимание вклад пути в измеренный сигнал транспортного средства
Дополнительно или альтернативно, по меньшей мере, один параметр состояния может быть параметром состояния транспортного средства, причем значение, по меньшей мере, одного параметра состояния на этапе установления получают с помощью идентификатора положения и первых сигналов регистрации из множества прогонов транспортного средства по задаваемому участку пути. Таким образом, используя изменения полученного сигнала регистрации транспортного средства между прогонами транспортного средства можно сделать более надежные выводы о текущем состоянии износа или повреждения.
В других вариантах осуществления изобретения, по меньшей мере, один параметр состояния может быть параметром состояния пути, причем значение, по меньшей мере, одного параметра состояния на этапе установления получают с использованием идентификатора положения и первых сигналов регистрации из множества прогонов транспортного средства по заранее задаваемому участку пути и/или из прогонов множества различных транспортных средств по заранее задаваемому участку пути. Таким образом, на основании изменения зарегистрированного сигнала транспортного средства в прогонах транспортного средства можно с более высокой надежностью сделать выводы о фактическом состоянии износа или повреждения состояния пути. То же справедливо и для аналогичных ответных сигналов от различных транспортных средств в том же самом положении.
Первый сигнал регистрации может быть сохранен и передан на дальнейшую обработку в принципе любым подходящим образом. Предпочтительным является сохранение и/или передача первого сигнала регистрации в защищенной от манипуляций форме, в частности, в защищенной от незамеченной манипуляции форме. Для этого могут использоваться любые пригодные криптографические методы или механизмы. В частности первый сигнал регистрации может быть зашифрован и/или снабжен цифровой подписью. То же справедливо для обработанных данных, генерируемых на основании первого сигнала регистрации. Такая логическая защита зарегистрированных и/или обработанных данных имеет преимущество, в частности, в отношении надежного и защищенного от манипуляций анализа транспортного средства и/или пути.
Кроме того, такая логическая защита используемых для анализа или переданных данных позволяет реализовывать программы стимулирования пользователей транспортного средства предоставлять свои мобильные оконечные устройства для анализа состояния, как будет более подробно описано дальше.
Идентификатор транспортного средства и/или информация об измерительном положении вводится предпочтительно на этапе распознавания с помощью соответствующих устройств ввода в оконечное устройство. Здесь речь может идти о простом вводе с помощью клавиатуры оконечного устройства. В наиболее предпочтительных вариантах осуществления изобретения ввод осуществляется с помощью беспроводного телекоммуникационного устройства и/или сканера штрих-кодов оконечного устройства.
При этом ввод может осуществляться пользователем оконечного устройства, который приводит в действие оконечное устройство для считывания идентификатора транспортного средства и/или информации об измерительном положении. Так, например, пользователь оконечного устройства может считывать с помощью оконечного устройства нанесенный на транспортном средстве машинно-считываемый код (например, штрих-код или подобный ему) с помощью соответствующего считывающего устройства (например, сканнера штрих-кодов). Так же возможно, что соответствующая информация считывается проводным или беспроводным способом, например, посредством телекоммуникации ближнего радиуса действия (NFC), с размещенного на транспортном средстве запоминающего устройства. Подобное электронное считывание может выполняться в частности автоматически, например, при входе в транспортное средство и/или при соединении оконечного устройства с держателем в транспортном средстве.
Анализ собранных данных может выполняться в принципе в любом месте. Так, этап установления может выполняться в устройстве обработки данных мобильного оконечного устройства и/или транспортного средства и/или в удаленном вычислительном центре. Дополнительно или альтернативно сигналы регистрации мобильного оконечного устройства, записанные, по меньшей мере, на одном этапе регистрации, и/или полученные на их основании обработанные данные для выполнения этапа установления на этапе передачи могут передаваться с помощью телекоммуникационного устройства мобильного оконечного устройства, в частности, по беспроводной телекоммуникационной сети, в виде передаваемых данных на устройство обработки данных транспортного средства и/или удаленного вычислительного центра.
При этом может применяться упомянутая выше программа стимулирования пользователей оконечных устройств. Так, может быть предусмотрено, что в зависимости от успешной верификации передаваемых данных (особенно в зависимости от их аутентичности и/или пригодности для анализа) на этапе вознаграждения, следующим за этапом передачи данных, осуществляется вознаграждение за передачу данных. Так, например, пользователь передающего оконечного устройства в качестве вознаграждения за передачу данных может получать кредит на свой счет (например, на банковский счет или на счет бонусных баллов у оператора транспортного средства или у третьих лиц). Такой кредит пользователь затем может использовать, например, для того, чтобы приобретать билеты у оператора транспортного средства и т.п.).
В этой связи естественно преимуществом является, когда передаваемые данные (вышеописанным образом) логически защищены соответствующим образом и включают в себя соответствующий (однократный и уникальный) идентификатор оконечного устройства и/или пользователя оконечного устройства.
Для каждого из вышеназванных вариантов преимуществом является объединение поступающих для анализа зарегистрированных данных с достаточно точными идентификаторами оконечного устройства. Таким образом могут быть сделаны выводы о свойствах интересующего нас датчика сигналов оконечного устройства, которые затем могут учитываться при анализе. Здесь речь может идти не обязательно об однозначном и однократном идентификаторе оконечного устройства, напротив, для того, чтобы сделать необходимые выводы об упомянутом датчике сигналов, может быть достаточно номера типа оконечного устройства или подобной информации.
В предпочтительном варианте исполнения изобретения на этапе реагирования выполняется ответ в зависимости от значения, по меньшей мере, одного параметра состояния, полученного на этапе установления. Здесь речь может идти о любой реакции, например, о соответствующем предупреждении водителю транспортного средства или в зависимости от сущности собранных параметров состояния безопасности для пассажиров или окружающей территории транспортного средства, также о прямом, при необходимости, автоматическом вмешательстве в работу транспортного средства (например, замедление или полное торможение транспортного средства до останова и т.п.).
Настоящее изобретение относится также к системе передачи значения, по меньшей мере, одного параметра состояния рельсового транспортного средства и/или пути рельсового транспортного средства, пригодной для исполнения настоящего изобретения. Система включает в себя рельсовое транспортное средство, устройство регистрации данных и, по меньшей мере, одно устройство обработки данных, причем устройство регистрации данных выполнено с тем, чтобы, по меньшей мере, на одном этапе регистрации данных получить, по меньшей мере, один коррелирующий с текущим значением параметра состояния текущий первый сигнал регистрации с помощью первого датчика сигналов в рельсовом транспортном средстве. Устройство обработки данных выполнено с тем, чтобы на этапе передачи данных передать значение, по меньшей мере, одного параметра состояния с помощью текущего первого сигнала сигнала регистрирующего устройства на основании, по меньшей мере, одного предыдущего этапа регистрации. Регистрационное устройство является датчиком сигналов мобильного оконечного устройства, расположенного на конструкции внутри транспортного средства, в, мо меньшей мере, одном измерительном положении и/или, по меньшей мере, одном измерительном направлении. Устройство обработки данных предназначено для получения значения, по меньшей мере, одного параметра состояния на основании анализа диапазона частот текущего первого сигнала регистрации выше 1–2 Гц, предпочтительно от 4 Гц до 15 кГц, наиболее предпочтительно от 10 Гц до 1 кГц.
Настоящее изобретения также относится к мобильному оконечному устройству, в частности, мобильному телефону, пригодному для выполнения способа в соответствии с изобретением. Мобильное оконечное устройство включает в себя, по меньшей мере, первый датчик сигналов и устройство обработки данных, причем имеется, по меньшей мере, один первый датчик для регистрации, по меньшей мере, одного коррелирующего с текущим значением параметра состояния, текущего первого сигнала регистрации. Устройство обработки данных предназначено для анализа частотного диапазона текущего первого сигнала регистрации выше 1–2 Гц, предпочтительно от 4 Гц до 15 кГц, наиболее предпочтительно от 10 Гц до 1 кГц с целью установления значения, по меньшей мере, одного параметра состояния. Дополнительно или альтернативно устройство обработки данных может быть предназначено для передачи текущего первого сигнала регистрации для установления значения, по меньшей мере, одного параметра состояния в каком-либо виде на следующее устройство обработки данных, которое позволяет выполнить анализ частотного диапазона текущего первого сигнала регистрации выше 1–2 Гц, предпочтительно от 4 Гц до 15 кГц, наиболее предпочтительно от 10 Гц до 1 кГц.
С помощью системы в соответствии с изобретением или с помощью мобильного оконечного устройства в соответствии с изобретением можно реализовать описанные варианты и преимущества способа в соответствии с изобретением в той мере, которая позволяет ссылаться на вышеописанные варианты исполнения изобретения.
Другие предпочтительные варианты исполнения изобретения можно получить на основании зависимых пунктов формулы изобретения или из приведенного далее описания предпочтительных вариантов исполнения со ссылкой на прилагаемые фигуры.
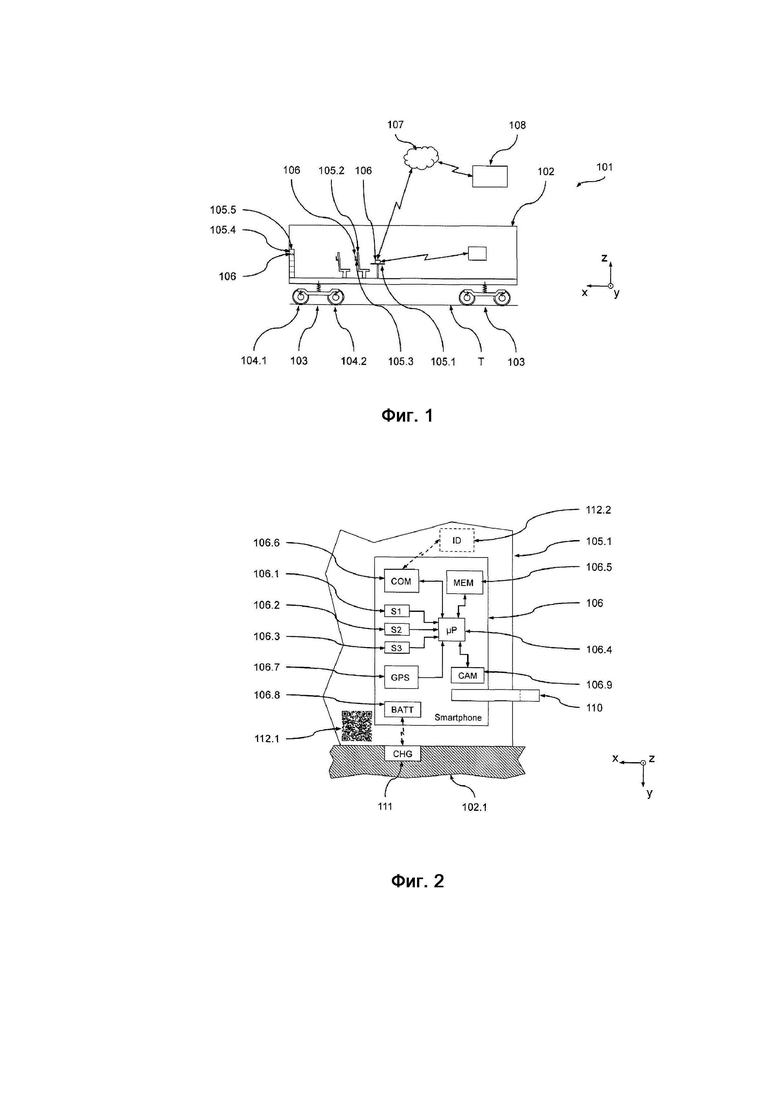
Фиг.1 – схематический вид сбоку предпочтительного варианта исполнения изобретения в соответствии с описанием с рельсовым транспортным средством, а также с предпочтительным вариантом исполнения мобильного оконечного устройства в соответствии с изобретением, пригодные для осуществления предпочтительного метода с соответствии с изобретением;
Фиг.2 – схематический вид мобильного оконечного устройства из фиг.1.
Далее со ссылкой на фиг.1 и 2 описывается предпочтительный вариант исполнения способа в соответствии с изобретением с помощью рельсового транспортного средства 101. Под рельсовым транспортным средством 101 понимается вагон мотор-вагонного подвижного состава, номинальная эксплуатационная скорость которого составляет более 180 км/ч, а именно около vn = 200 км/ч.
Транспортное средство 101 включает в себя кузов 102, который на обоих краях типовым образом расположен на устройстве ходовой части в виде тележки 103 с двумя колесными устройствами в виде первого колесного блока 104.1 и второго колесного блока 104.2. Очевидно, что настоящее изобретение может быть реализовано в других конфигурациях, при которых кузов просто закреплен непосредственно на ходовой части. Также вместо колесных блоков могут быть предусмотрены другие колесные устройства, например, колесные пары или одиночные колеса.
Для простоты понимания на фигурах изображена система координат транспортного средства x,y,z (на уровне тележки 103), в которой ось х соответствует продольному направлению, ось y – поперечному направлению, ось z – вертикальному направлению рельсового транспортного средства 101.
Под транспортным средством 101 понимается транспортное средство для перевозки людей, причем внутри кузова 102 предусмотрены (не изображенные на фигуре) кресла, а также на отдельных местах столы 105.1 для пассажиров, жестко (в сущности, неподвижно) соединенные как с конструкцией 102.1 стен, так и с конструкцией 102.2 пола кузова 102.
В настоящем примере для установления текущего состояния износа или повреждения определенных компонентов транспортного средства 101, а также пути Т применяется мобильное оконечное устройство в виде смартфона 106, положенного на стол 105.1 и при необходимости закрепленного на столе с помощью держателя или зажимного устройства в виде зажима 110.
Мобильное оконечное устройство 106 имеет ряд датчиков сигналов, при этом, в частности, первый датчик сигналов в виде датчика ускорения 106.1, второй датчик сигналов в виде микрофона 106.2, и третий датчик сигналов в виде, датчика 106.3 вращения. При этом датчик 106.1 ускорения при эксплуатации регистрирует в качестве первого сигнала S1 регистрации действующие на мобильное оконечное устройство 106 ускорения во всех трех направлениях в пространстве (x, y, z), а микрофон 106.2 регистрирует в качестве второго сигнала S2 регистрации запись звуков окружения, а датчик 106.3 вращения в качестве третьего сигнала S3 регистрации скорость вращения во всех трех осевых направлениях (x, y, z).
Кроме того, мобильное оконечное устройство 106 имеет первое устройство обработки данных в виде процессора 106.2, обращающегося к запоминающему устройству 106.5. В запоминающем устройстве 106.5 хранятся как программы, так и данные, которые процессор 106.4 использует при работе мобильного оконечного устройства 106.
Наконец, мобильное оконечное устройство 106 имеет телекоммуникационный модуль 106.6, а также устройство определения положения в виде модуля GPS 106.7. С помощью телекоммуникационного модуля 106.6 традиционным способом, например, по беспроводной коммуникационной сети 107 может выполняться обмен данными со вторым удаленным устройством обработки данных в виде удаленного вычислительного центра 108. Аналогично по локальной беспроводной связи (например, WLAN или Bluetooth) может осуществляться соединение со следующим устройством 109 обработки данных транспортного средства 101.
С помощью модуля GPS также традиционным способом можно получать актуальные данные о положении мобильного оконечного устройства 106 и передавать их на процессор 106.4. Модуль GPS 106.7 может использоваться также традиционным образом для синхронизации модуля регистрации времени, выступающего в качестве часов реального времени для процессора 106.4 с внешним источником получения времени. Также синхронизация может выполняться по мобильной сети 107.
В запоминающем устройстве 106.5 среди прочего сохранена измерительная программа, при исполнении которой процессор 106.4 опрашивает датчики 106.1 – 106.3 сигналов с тем, чтобы на первом этапе регистрации данных получить от датчиков 106.1 – 106.3 сигналов текущие значение сигналов от S1 до S3 и сохранить их как первый ряд MR1 измерений в запоминающем устройстве 106.5. При этом значения сигналов S1-S3 сохраняют в связке с информацией PI положения, которую получают из сигнала положения модуля GPS 106.7, а также в связке с временной информацией TI, генерируемой процессором 106.4.
В предпочтительных вариантах осуществления изобретения сигналы от S1 до S3 регистрации могут дополнительно сохраняться в связке с отражающей текущее эксплуатационное состояние транспортного средства, в частности, текущую скорость транспортного средства эксплуатационной информацией BI. Кроме того, сигналы от S1 до S3 регистрации могут сохраняться в связке с однократным и уникальным идентификатором VID транспортного средства 101 и с отражающей положение оконечного устройства 106 внутри транспортного средства 101 на этапе регистрации данных информацией MPI об измерительном положении. Тем самым благоприятным образом можно включить в анализ эксплуатационную информацию BI, идентификатор VID транспортного средства и информацию MPI об измерительном положении вместе с временной информацией TI, а при необходимости информацией PI о положении. Это полезно особенно в тех случаях, когда анализируются множественные следующие друг за другом по времени ряды от MR1 до MRn измерений.
Идентификатор VID транспортного средства при этом позволяет быстрое соотнесение сигналов от S1 до S3 регистрации с соответствующим транспортным средством 101, а информация MPI об измерительном положении позволяет сделать выводы о передаче сигнала или передающей функции между конструкцией транспортного средства 101 и мобильным оконечным устройством 106, и тем самым точный анализ сигналов от S1 до S3 регистрации.
Идентификатор VID транспортного средства и информация MPI об измерительном положении записываются или считываются на этапе установления. В настоящем примере считывание обеспечивается с помощью камеры 106.9, посредством которой пользователь оконечного устройства 106 фотографирует штрих-код 112.1, нанесенный на столе 105.1. Процессор 106.4 оконечного устройства 106 затем использует сохраненную в запоминающем устройстве 106.5 программу сканирования штрих-кодов с тем, чтобы на основании полученного штрих-кода 112.1 извлечь идентификатор VID транспортного средства 101 и информацию MPI об измерительном положении. Информация MPI об измерительном положении при этом описывает точное положение стола 105.1 внутри транспортного средства 101.
Альтернативно идентификатор VID транспортного средства 101 и информация MPI об измерительном положении может быть получен автоматически при закреплении оконечного устройства 106 на столе 105.1. Так, например, соответствующая информация VID и MPI могут быть считаны беспроводным способом по так называемой связи малого радиуса действия (NFC) из коммуникационного модуля 106.6 из, например, расположенного на столе 105.1 запоминающего устройства 112.2. Эта функция инициируется пользователем оконечного устройства 106 или автоматически, например, при достаточном приближении к запоминающему устройству 112.2 или с помощью соответствующего (не показанного на фигурах) выключателя на столе 105.1.
В настоящем примере в качестве передаваемых данных TMD по мобильной сети 107 в удаленный вычислительный центр 108 передают идентификатор PI положения, идентификатор TI времени, идентификатор VID транспортного средства и информацию MPI об измерительном положении первого ряда MR1 измерений.
Здесь подготовленные как передаваемые данные TMD сигналы S1-S3 первого ряда MR1 измерений сохраняются в защищенном от нераспознанной манипуляции виде и передаются дальше процессором 106.4 (обращающимся к соответствующим криптографическим программам в запоминающем устройстве 106.5). Для этого могут использоваться любые подходящие криптографические методы или механизмы. В настоящем примере исполнения изобретения подготовленные сигналы от S1 до S3 первого ряда MR1 измерений объединяются с однократным уникальным идентификатором SID оконечного устройства 106 и снабжаются цифровой подписью SIG оконечного устройства 106. Такая логическая защита зарегистрированных и/или обработанных данных дает преимущество в отношении надежного и защищенного от манипуляций анализа транспортного средства 101 и пути транспортного средства 101.
Кроме того, с помощью идентификатора SID оконечного устройства 106 возможно при последующем анализе передаваемых данных TMD сделать выводы о положении и/или характеристиках встроенного в оконечное устройство 106 датчиков 106.1-106.3 сигналов, и включить эту информацию в анализ. Очевидно, что в других вариантах осуществления изобретения для этого может быть достаточно и менее точной информации об оконечном устройстве 106. Например, для этой цели может использоваться номер типа оконечного устройства.
В удаленном вычислительном центре 108 производится анализ подготовленных сигналов от S1 до S3 первого ряда MR1 измерений с тем, чтобы сделать выводы о текущем состоянии износа или повреждения определенных компонентов транспортного средства 101 или пути Т. Здесь используют тот факт, что датчики 106.1–106.3 подобного мобильного оконечного устройства 106 генерируют сигналы от S1 до S3 с достаточным частотным разрешением, позволяющим анализировать сигналы от S1 до S3 в более высоких частотных диапазонах выше от 1 Гц до 2 Гц, предпочтительно выше от 4 Гц.
Именно в этих более высоких частотных диапазонах находятся ответы системы транспортного средства 101 (например, механические и/или акустические колебания), значимые для анализа состояния износа или повреждения определенных компонентов транспортного средства 101 или пути Т. При этом одновременная регистрация нескольких различных сигналов от S1 до S3 позволяет осуществлять их комбинированную обработку и тем самым надежный анализ состояния износа или повреждения соответствующих компонентов транспортного средства 101 или пути Т.
Так определенные состояния износа или повреждения отдельных компонентов транспортного средства или пути Т, как правило, соответствуют характерным моделям колебаний, которые учитываются при анализе. Именно анализ нескольких зарегистрированных одновременно сигналов S1-S3 позволяет улучшить идентификацию текущего состояния или значимых параметров состояния соответствующих компонентов транспортного средства 101 или пути Т, так как определенные модели колебаний сигнала (например, сигнала S1) могут соответствовать нескольким различным состояниям или нескольким компонентам транспортного средства 101 или пути Т, которые позволяют соотнести одновременно зарегистрированную модель колебаний, по меньшей мере, одного дополнительного сигнала (например, сигнала S2 и/или S3) с определенным состоянием компонента транспортного средства 101 или пути Т.
В настоящем примере исполнения изобретения анализ сигналов S1-S3 или установление значения, по меньшей мере, одного параметра состояния транспортного средства 101 или пути осуществляется в удаленном вычислительном центре 108 в частотном диапазоне выше 1–2 Гц, предпочтительно от 4 Гц до 15 кГц, наиболее предпочтительно от 10 Гц до 1 кГц.
В настоящем примере исполнения изобретения при анализе колебаний компонентов подвески ходовой части 103 исследуются сигналы от S1 до S3 предпочтительно в частотном диапазоне от 1 Гц до 10 Гц, предпочтительно от 1 Гц до 4 Гц, наиболее предпочтительно от 1 Гц до 2 Гц. Далее, при анализе механических колебаний конструкций транспортного средства исследуются сигналы S1 и S3 соответственно в частотном диапазоне от 2 Гц до 50 Гц, предпочтительно от 4 Гц до 40 Гц, наиболее предпочтительно от 5 Гц до 30 Гц. В противоположность этому сигнал S2 при акустическом анализе исследуется в частотном диапазоне от 10 Гц до 20 кГц, предпочтительно от 50 Гц до 10 кГц, наиболее предпочтительно от 100 Гц до 1 кГц.
В настоящем примере мобильное оконечное устройство 106 расположено на столе 105.1 как конструкции внутри транспортного средства 101, с которой могут быть считаны соответствующие сигналы от S1 до S3. Для этого подходят в принципе любые конструкции внутри транспортного средства 101, если достаточно известна связка по сигналу (следовательно, функция передачи) между конструкцией (например, столом 105.1) и значимом (для анализа состояния) компонентом транспортного средства или пути Т.
Разумеется, что в качестве конструкции внутри транспортного средства 101 может выступать и другое устройство хранения, например, багажная полка. Дополнительно или альтернативно в качестве конструкции внутри транспортного средства может выступать конструкция 102.1 стен или пола 102.2, при этом мобильное оконечное устройство 106 на этапе регистрации соединяется с конструкцией 102.1 стены или конструкцией 102.2 пола. Также возможно использовать устройство для хранения сиденья 105.2 или размещенный на сиденье 105.2 держатель 105.2 мобильного оконечного устройства 106. Наконец, в качестве устройства хранения может использоваться предпочтительно запирающийся ящик 105.4 в шкафу 105.5 в транспортном средстве 101, соединенном с конструкцией транспортного средства, который предпочтительно оснащен держателем для мобильного оконечного устройства 106.
Разумеется, что описанные способы считывания идентификатора VID транспортного средства и информации MPI об измерительном положении возможны не только с помощью стола 105.1, но и в других описанных вариантах расположения оконечного устройства, например, с помощью держателя 105.3 сиденья 105.2 или в ящике 105.4, а также любого другого места в транспортном средстве 101.
В настоящем примере для выполнения этапа регистрации мобильное оконечное устройство 106 может быть просто размещено на столе 105.1. Предпочтительно, мобильное оконечное устройство для выполнения этапа регистрации жестко, по существу неподвижно, соединяется со столом 105.1 (или с соответствующей конструкцией транспортного средства 101) как описано с помощью держателя или зажимного устройства 110, благодаря чему обеспечивается в достаточной степени определенная передача сигналов или функция передачи между соответствующей конструкцией (например, столом 105.1) и мобильным оконечным устройством 106.
Особенно предпочтительно, когда держатель или зажимное устройство 110 пространственно соотносится с зарядным устройством 111 для зарядки оконечного устройства. При этом особенно удобно и тем самым предпочтительно, когда речь идет о (например, индуктивном) зарядном устройстве 111, которое при необходимости позволяет беспроводную зарядку аккумулятора 106.8 оконечного устройства 106.
Для анализа текущего состояния износа или повреждения заинтересованных компонентов транспортного средства 101 или пути Т может быть достаточно проанализировать ряд MR1 измерений, полученных на этапе регистрации. При этом может идти речь о ряде измерений, который регистрируется при однократном прогоне на определенном участке пути.
Предпочтительно могут регистрироваться и использоваться для анализа несколько рядов MR1–MRn измерений. В этих случаях мобильное оконечное устройство 106 может в принципе постоянно быть соединенным с конструкцией внутри транспортного средства 101 (например, со столом 105.1) в одном и том же измерительном положении и/или направлении. С тем, чтобы получить более убедительные результаты или снизить риск нераспознанных сбоев отдельных датчиков от 106.1 до 106.3, может быть также предусмотрено, что для выполнения первого этапа регистрации или получения первого ряда MR1 измерения при первом прогоне по заданному участку пути Т мобильное оконечное устройство 106 соединяется с конструкцией внутри транспортного средства 101 (например, столом 105.1) в задаваемом первом измерительном положении и/или измерительном направлении, а для выполнения второго этапа регистрации или получения второго ряда MR1 измерения при втором прогоне по заданному участку пути Т мобильное оконечное устройство 106 соединяется с конструкцией внутри транспортного средства 101 (например, столом 105.1) в задаваемом втором измерительном положении и/или измерительном направлении.
При этом предпочтительно, что на этапе установления или анализа значение, по меньшей мере, одного параметра состояния с применением сигналов от S1 до S3 регистрации из одного или нескольких предыдущих этапов регистрации передается в вычислительный центр или из одного или нескольких предыдущих рядов от MR2 до MRn измерений. Тем самым обеспечивается возможность благоприятным образом учитывать при анализе историю сигналов от S1 до S3, а, следовательно, состояний износа или повреждения соответствующих компонентов транспортного средства 101 или пути Т.
Предпочтительно при анализе состояния износа или повреждения соответствующих компонентом транспортного средства 101 или пути Т выполнятся сравнение достаточно известного предыдущего состояния и текущего состояния, получаемого из текущего измерения или ряда MR1 измерений, так как благодаря этому могут быть сделаны надежные выводы об изменении состояния соответствующих изнашиваемых или повреждаемых механизмов.
Эталонное состояние может быть получено любым способом, в частности, вычислительным путем и/или с помощью соответствующих сравнительных измерений в самом транспортном средстве 101 или эталонном транспортном средстве. В определенных вариантах осуществления изобретения значение, по меньшей мере, одного параметра состояния устанавливается на этапе установления с применением эталонных сигналов от VS1 до VS3 регистрации из, по меньшей мере, одного предыдущего этапа эталонной регистрации или, по меньшей мере, одного из предыдущих рядов данных от MR2 до MRn. При этом значение, по меньшей мере, одного параметра состояния может быть получено на этапе установления с применением текущего первого сигнала регистрации из множества предыдущих этапов регистрации или рядов от MR2 до MRn измерений эталонных сигналов регистрации из множества предыдущих эталонных этапов от VS1 до VS3 регистрации.
При этом может быть предусмотрено, что, по меньшей мере, выполняют, по меньшей мере, один эталонный этап регистрации (с эталонными сигналами от VS1 до VS3 регистрации) с помощью мобильного оконечного устройства 106 непосредственно в самом транспортном средстве 101 в известном состоянии, в частности, в новом состоянии или состоянии технического обслуживания, в котором известно определенное значение, по меньшей мере, одного параметра состояния.
В других вариантах, где используются полученные с помощью вычислений эталонные значения, значение, по меньшей мере, одного параметра состояния получают на этапе установления с применением, по меньшей мере, одного эталонного значения от VM1 до VM3, которое, в свою очередь, получают из эталонной модели транспортного средства 101. При этом может быть предусмотрено, что эталонная модель с эталонными значениями от VM1 до VM3 соответственно предоставляет соответственно ожидаемые значения соответствующих сигналов от S1 до S3 регистрации на момент регистрации текущих сигналов от S1 до S3 регистрации.
Принципиально для различных сигналов от S1 до S3 регистрации могут использоваться различные частоты или частотные диапазоны, в частности, в зависимости от того, в каком частотном диапазоне износ или повреждение оказывает влияние на соответствующие сигналы от S1 до S3 регистрации. Для установления значения, по меньшей мере, одного параметра состояния может анализироваться в сущности тот же диапазон частот соответствующего текущего сигнала от S1 до S3 регистрации.
В настоящем примере предметом анализа могут быть различные компоненты транспортного средства 101. При этом в качестве компонентов могут выступать компоненты поворотной тележки 103 и/или компоненты приводного устройства транспортного средства 101 и/или компоненты вспомогательного эксплуатационного устройства транспортного средства 101, в частности, кондиционер и/или компрессор транспортного средства 101.
Кроме того, в определенных вариантах осуществления изобретения анализ на этапе установления может выполняться с использованием информации о положении и информации о пути, отражающей состояние проходимого пути (в месте, соответствующем информации PI о положении). Это имеет то преимущество, что информация о пути позволяет оценить или учесть долю или вклад пути Т в зарегистрированный сигнальный ответ транспортного средства 101.
Кроме того, значение соответствующего параметра состояния компонента транспортного средства 101 на этапе установления с применением идентификатора положение или информации PI о положении и сигналов от S1 до S3 регистрации из множества прогонов транспортного средства 101 (или соответствующих рядов от MR1 до MRn измерений) по задаваемому участку пути Т. Тем самым, на основании изменения зарегистрированного сигнального ответа транспортного средства 101 между прогонами транспортного средства 101 с более высокой надежностью можно сделать выводы о состоянии износа или повреждения компонента транспортного средства 101.
В других вариантах осуществления изобретения значение параметра состояния пути Т на этапе установления получают с помощью идентификатора положения или информации PI о положении и сигналов от S1 до S3 регистрации из множества прогонов транспортного средства 101 по задаваемому участку пути и/или из прогонов множества различных транспортных средств 101 по задаваемому участку пути Т. Здесь на основании изменения зарегистрированного сигнального ответа задействованного транспортного средства 101 между прогонами задействованного транспортного средства 101 можно с большей уверенностью сделать выводы о реальном состоянии износа или повреждения пути Т. То же справедливо для подобных сигнальных ответов различных транспортных средств 101 в том же положении.
В настоящем примере анализ зарегистрированных данных или рядов от MR1 до MRn измерений выполняется в удаленном вычислительном центре 108. Также может быть предусмотрено, что анализ (т.е. этап установления) дополнительно или альтернативно выполняется в процессоре 106.4 мобильного оконечного устройства 106 и/или в устройстве 109 обработки данных транспортного средства 101.
В настоящем примере на этапе реагирования выполняется реакция в зависимости от результата анализа, следовательно, в зависимости от значения, по меньшей мере, одного параметра состояния, который получают на этапе установления. Здесь речь идет о любой реакции, например, соответствующем предупреждении водителю транспортного средства 101 в зависимости от важности зарегистрированного состояния для безопасности пассажиров или территории вокруг транспортного средства, а также о не посредственном, при необходимости автоматическом вмешательстве в управление транспортным средством 101 (например, замедлении или торможении транспортного средства до полного остановки и т.п.).
В настоящем примере осуществления изобретения благоприятным образом также может быть внедрена программа стимулирования для пользователей оконечных устройств. Так, может быть предусмотрено, что в зависимости от успешной верификации передаваемых данных TMD (в частности, в зависимости от их аутентичности и/или пригодности для анализа) на этапе вознаграждения, следующим за этапом передачи, производится вознаграждение за передачу данных TMD. Так, например, пользователь передающего оконечного устройства 106 может получать в качестве вознаграждения за передачу данных TMD кредит на свой счет (например, банковский счет или счет накопления бонусных баллов у оператора транспортного средства или третьего лица). Такой кредит пользователь может затем использовать для того, чтобы приобретать проездные документы у оператора транспортного средства 101 и т.п.
В этой связи преимуществом является, когда передаваемые данные TMD вышеописанным способом соответственно логически защищаются с помощью цифровой подписи SIG, и дополнительно однозначно и с защитой от манипуляций привязываются к оконечному устройству 106 и тем самым к пользователю оконечного устройства 106 с помощью однократного и уникального идентификатора SID оконечного устройства 106.
Настоящее изобретение описано выше исключительно с помощью примеров осуществления изобретения, в которых сигналы от S1 до S3 регистрации анализируются по всем трем направлениям (x, y, z). Разумеется, что изобретение может быть реализовано с помощью сигналов регистрации, в случае которых анализируются меньше или только одно из трех направлений (x, y, z), если только на их основании можно сделать достаточно убедительные выводы.
Настоящее изобретение описано выше исключительно с помощью примеров осуществления изобретения, в которых анализируются три сигнала от S1 до S3 регистрации. Разумеется, что изобретение может быть реализовано с помощью любого другого количества сигналов регистрации. В частности, может быть достаточно проанализировать одиночный сигнал регистрации (например, только один из сигналов от S1 до S3), если только на его основании можно сделать достаточно убедительные выводы.
Изобретение относится к средствам диагностики на железнодорожном транспорте для определения параметров состояния рельсового пути и транспортного средства. В способе по меньшей мере на одном из этапов регистрации с помощью первого датчика сигналов (106.1, 106.2, 106.3) от конструкции, находящейся внутри рельсового транспортного средства (101), получают по меньшей мере один текущий первый сигнал регистрации, коррелирующий с текущим значением параметра состояния, причем для получения текущего первого сигнала регистрации используют датчик сигналов (106.1, 106.2, 106.3) мобильного оконечного устройства (106). Для установления значения по меньшей мере одного параметра состояния анализируют диапазон частот текущего первого сигнала регистрации выше 1-2 Гц, предпочтительно от 4 Гц до 15 кГц, наиболее предпочтительно от 10 Гц до 1 кГц. Достигается повышение надежности и простоты получения текущих значений параметров рельсового пути и транспортного средства. 3 н. и 12 з.п. ф-лы, 2 ил.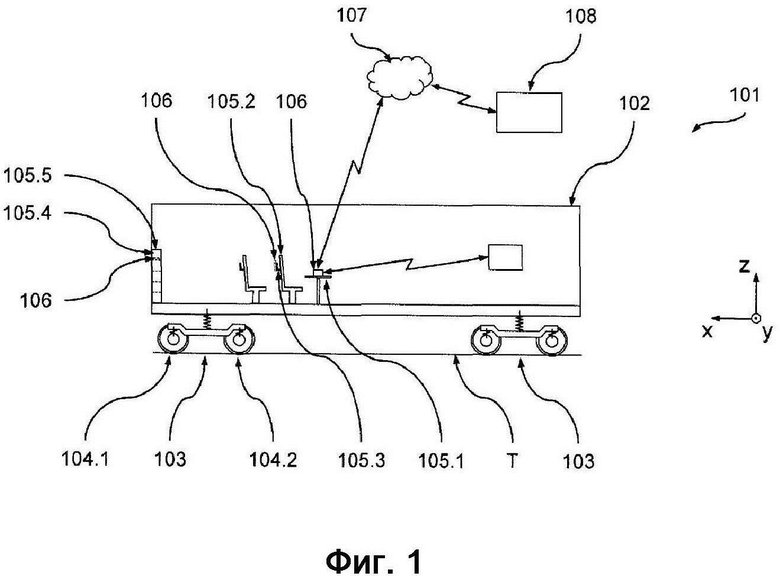
1. Способ установления значения по меньшей мере одного параметра состояния рельсового транспортного средства (101) и/или пути рельсового транспортного средства (101),
– в котором по меньшей мере на одном из этапов регистрации с помощью первого датчика сигналов (106.1, 106.2, 106.3) от конструкции, находящейся внутри рельсового транспортного средства (101), получают по меньшей мере один текущий первый сигнал регистрации, коррелирующий с текущим значением параметра состояния,
– причем для получения текущего первого сигнала регистрации используют датчик сигналов (106.1, 106.2, 106.3) мобильного оконечного устройства (106),
отличающийся тем, что
– для установления значения по меньшей мере одного параметра состояния анализируют область частот текущего первого сигнала регистрации выше 1-2 Гц, предпочтительно от 4 Гц до 15 кГц, более предпочтительно от 10 Гц до 1 кГц.
2. Способ по п.1, отличающийся тем, что
– в качестве мобильного оконечного устройства (106) применяют мобильный телефон, в частности смартфон,
или
– в качестве мобильного оконечного устройства (106) применяют планшетный компьютер,
или
– в качестве мобильного оконечного устройства (106) применяют мобильный навигационный прибор,
или
– в качестве мобильного оконечного устройства (106) применяют умные часы.
3. Способ по п.1 или 2, причем
– в качестве датчика сигналов применяют по меньшей мере один датчик ускорения (106.1) мобильного оконечного устройства (106),
и/или
– в качестве датчика сигналов применяют по меньшей мере один датчик вращения (106.3) мобильного оконечного устройства (106),
и/или
– в качестве датчика сигналов применяют по меньшей мере один микрофон (106.2) мобильного оконечного устройства (106),
и/или
– в качестве датчика сигналов применяют по меньшей мере одну камеру мобильного оконечного устройства (106),
и/или
– в качестве датчика сигналов применяют по меньшей мере один датчик температуры мобильного оконечного устройства и/или по меньшей мере один датчик магнитного поля мобильного оконечного устройства (106).
4. Способ по любому из пп.1-3, причем
– конструкция внутри рельсового транспортного средства (101) представляет собой устройство для хранения, в частности багажную полку, и/или стол (105.1), и/или место (105.2) для хранения сиденья, и/или, в частности, запирающийся ящик (105.4) транспортного средства, и мобильное оконечное устройство (106) для этапа регистрации связано с устройством для хранения, в частности расположено на устройстве (105.1) для хранения,
и/или
– конструкция внутри транспортного средства (101) представляет собой конструкцию (102.1, 102.2) стены, в частности боковую стену (102.1), и мобильное оконечное устройство (106) для этапа регистрации соединено с конструкцией (102.1, 102.2) стены,
и/или
– мобильное оконечное устройство (106) для этапа регистрации жестко, по существу, неподвижно соединено с конструкцией внутри транспортного средства (101),
и/или
– мобильное оконечное устройство (106) для этапа регистрации соединено с конструкцией внутри транспортного средства (101) с помощью зажимного приспособления,
и/или
– мобильное оконечное устройство (106) для этапа регистрации соединено с конструкцией внутри транспортного средства (101) с помощью держателя (105.3, 110), причем держатель, в частности, расположен в ящике (105.4) транспортного средства (101), причем ящик (105.4), в частности, выполнен как запирающийся, и/или держатель (105.3, 110) пространственно сопряжен, в частности, с зарядным устройством (111) для оконечного устройства (106),
и/или
– мобильное оконечное устройство (106) для первого этапа регистрации при первом прохождении задаваемого участка пути в первой задаваемой измеряемой позиции и/или ориентации соединено с конструкцией внутри транспортного средства (101), и мобильное оконечное устройство (106) для второго этапа регистрации при втором прохождении задаваемого участка пути во второй задаваемой измеряемой позиции и/или ориентации соединено с конструкцией внутри транспортного средства (101).
5. Способ по любому из пп.1-4, в котором
– на этапе регистрации получают значение по меньшей мере одного параметра состояния с помощью текущих первых сигналов регистрации на по меньшей мере одном предыдущем этапе регистрации, причем
– на данном этапе регистрации получают значение по меньшей мере одного параметра состояния, в частности, с помощью текущих первых сигналов регистрации из множества предыдущих этапов регистрации.
6. Способ по п.5, причем
– получают значение по меньшей мере одного параметра состояния на этапе регистрации с помощью по меньшей мере одного эталонного сигнала регистрации из по меньшей мере одного предыдущего эталонного этапа регистрации, причем
– значение по меньшей мере одного параметра состояния на данном этапе регистрации получают, в частности, с помощью текущих первых сигналов регистрации из множества предыдущих этапов регистрации и множества эталонных сигналов регистрации из множества предыдущих этапов регистрации,
и/или
– по меньшей мере один сравнительный этап регистрации, в частности, проводят для транспортного средства или для сравнительного транспортного средства, которое соответствует данному транспортному средству, по меньшей мере, типу транспортного средства,
и/или
– по меньшей мере один сравнительный этап регистрации проводят, в частности, для транспортного средства в известном состоянии, в частности, в новом состоянии или в режиме технического обслуживания, в котором имеется заданное значение по меньшей мере одного параметра состояния.
7. Способ по п.5 или 6, причем
– получают значение по меньшей мере одного параметра состояния на этапе регистрации с использованием по меньшей мере одного сравнительного эталонного значения, которое получают для сравнительной эталонной модели транспортного средства (101), причем
– сравнительная модель дает, в частности, по меньшей мере одно ожидаемое значение первого сигнала регистрации на момент регистрации по меньшей мере одного текущего первого сигнала регистрации.
8. Способ по любому из пп.1-7, причем
– на по меньшей мере одном этапе регистрации измеряют по меньшей мере один текущий второй сигнал регистрации, коррелирующий с текущим значением по меньшей мере одного параметра состояния, с помощью второго датчика сигналов (106.1, 106.2, 106.3) в рельсовом транспортном средстве (106.1, 106.2, 106.3), и
– на данном этапе регистрации получают значение по меньшей мере одного параметра состояния с использованием текущего первого сигнала регистрации и текущего второго сигнала регистрации из по меньшей мере одного предыдущего этапа регистрации, в частности, из множества предыдущих этапов регистрации, причем
– для измерения текущего второго сигнала регистрации используют, в частности, второй сигнальный датчик (106.1, 106.2, 106.3) мобильного оконечного устройства (106),
и/или
– для измерения значения по меньшей мере одного параметра состояния, анализируют, в частности, диапазон частот текущего второго сигнала выше 1-2 Гц, предпочтительно 4 Гц – 15 кГц, более предпочтительно 10 Гц – 1кГц,
и/или
– для установления значения по меньшей мере одного параметра состояния анализируют, в частности, по существу, тот же самый диапазон частот текущего первого и второго сигнала регистрации,
и/или
– в качестве первого датчика сигналов (106.1, 106.2, 106.3) используют, в частности, по меньшей мере один датчик ускорения и/или по меньшей мере один датчик вращения мобильного оконечного устройства (106), и в качестве второго датчика сигналов (106.1, 106.2, 106.3) используют, в частности, по меньшей мере один микрофон мобильного оконечного устройства (106).
9. Способ по любому из пп.1-8, причем
– значение по меньшей мере одного параметра состояния соответствует одному состоянию, в частности состоянию износа и/или состоянию конструктивной целостности по меньшей мере одного компонента транспортного средства (101),
причем
– компонент транспортного средства является, в частности, компонентом ходовой части транспортного средства (101),
и/или
– компонент транспортного средства является, в частности, компонентом приводного устройства транспортного средства (101),
и/или
– компонент транспортного средства является, в частности, компонентом вспомогательного эксплуатационного оборудования транспортного средства (101), в частности кондиционером и/или компрессором транспортного средства (101).
10. Способ по любому из пп.1-9, причем
– первый сигнал регистрации сохраняют вместе с идентификатором времени, соответствующим моменту времени регистрации и/или с идентификатором положения оконечного устройства, соответствующего текущему положению транспортного средства (101), и/или, по меньшей мере, с данными об эксплуатации, соответствующими текущему режиму эксплуатации транспортного средства (101), в частности текущей скорости транспортного средства (101), и/или с идентификатором транспортного средства (101), в частности одноразовым и уникальным идентификатором транспортного средства (101), и/или с данными измеренного положения, соответствующими положению оконечного устройства (106) внутри транспортного средства (101) на этапе регистрации,
причем
– значение по меньшей мере одного параметра положения на данном этапе регистрации получают, в частности, с помощью идентификатора положения и данных о пути, соответствующих состоянию пройденного пути,
и/или
– из первых сигналов регистрации из множества прогонов транспортного средства (101) по задаваемому участку пути получают по меньшей мере один параметр состояния, в частности параметр состояния транспортного средства (101) и значение по меньшей мере одного параметра состояния на этом этапе регистрации с использованием идентификатора положения,
и/или
– по меньшей мере один параметр состояния является, в частности, параметром состояния пути, и значение по меньшей мере одного параметра состояния на данном этапе регистрации получают из множества проездов транспортного средства (101) по задаваемому участку пути и/или из проездов множества различных транспортных средств по одному задаваемому участку пути с использованием идентификатора положения,
и/или
– первый сигнал регистрации сохраняют защищенным от манипуляций способом, в частности от неопознанной манипуляции, в частности, с помощью шифрования и/или цифровой подписи,
и/или
– идентификатор транспортного средства (101) и/или данные об измеренном положении на этапе распознавания вводится в оконечное устройство (106) с помощью устройства ввода данных, в частности беспроводного коммуникационного устройства и/или сканера для считывания штрихового кода, в частности, автоматически при входе в транспортное средства и/или соединении оконечного устройства (106) с держателем (105.3, 110) транспортного средства (101).
11. Способ по любому из пп.1-10, причем
– этап регистрации выполняют в устройстве обработки данных мобильного оконечного устройства (106), и/или транспортного средства (101), и/или удаленного вычислительного центра (108),
и/или
– зарегистрированные по меньшей мере на одном этапе сигналы регистрации мобильного оконечного устройства (106) и/или полученные в результате их обработки данные для выполнения этапа регистрации с помощью коммуникационного устройства мобильного оконечного устройства (106) на этапе передачи данных передают в виде передаваемых данных, в частности, через беспроводную коммуникационную сеть (107) на устройство обработки данных транспортного средства (101) и/или удаленного вычислительного центра (108), причем на этапе вознаграждения, следующем за этапом передачи данных, производят, в частности, вознаграждение,
и/или
– на этапе реагирования выполняют реакцию в зависимости от значения по меньшей мере одного параметра состояния, полученного на этапе регистрации.
12. Система для установления значения по меньшей мере одного параметра состояния рельсового транспортного средства (101) и/или пути рельсового транспортного средства (101), в частности, для осуществления способа по любому из пп.1-11, включающая в себя:
– рельсовое транспортное средство (101),
– устройство (106) регистрации и
– по меньшей мере, устройство обработки данных (106.4, 108, 109), причем
– устройство (106) регистрации выполнено с возможностью получения по меньшей мере на одном этапе регистрации по меньшей мере одного коррелирующего с текущим значением параметра состояния, текущего первого сигнала регистрации с помощью первого датчика (106.1, 106.2, 106.3) сигналов в рельсовом транспортном средстве, и
– устройство (106.4, 108, 109) обработки данных выполнено с возможностью установления на этапе установления значения по меньшей мере одного параметра состояния с помощью текущего первого сигнала регистрации устройства (106) регистрации из по меньшей мере одного предыдущего этапа регистрации,
– устройство (106) регистрации представляет собой первый датчик (106.1, 106.2, 106.3) сигналов мобильного оконечного устройства (106), расположенный на конструкции внутри транспортного средства (101) на по меньшей мере одной измерительной позиции и/или в по меньшей мере одном измерительном положении,
отличающаяся тем, что
– устройство (106.4, 108, 109) обработки данных выполнено с возможностью установления значения по меньшей мере одного параметра состояния с помощью анализа области частот текущего первого сигнала регистрации выше области частот от 1-2 Гц, предпочтительно от 4 Гц до 15 кГц, более предпочтительно от 10 Гц до 1 кГц.
13. Система по п.12, причем
– мобильное оконечное устройство (106) представляет собой мобильный телефон, в частности смартфон, или планшетный компьютер, или мобильное навигационное устройство, или умные часы,
и/или
– датчик (106.1, 106.2, 106.3) сигналов представляет собой по меньшей мере один датчик ускорения, и/или по меньшей мере один датчик вращения, и/или по меньшей мере один микрофон, и/или камеру, и/или по меньшей мере один датчик температуры мобильного оконечного устройства, и/или по меньшей мере один датчик магнитного поля мобильного оконечного устройства (106),
и/или
– конструкция внутри транспортного средства (101) представляет собой устройство для хранения, в частности багажную полку, и/или стол (105.1), и/или место (105.3) для хранения сиденья (105.2), и/или ящик (105.4) транспортного средства (101), и мобильное оконечное устройство (106) на этапе регистрации может подсоединяться к месту для хранения, в частности размещаться в месте для хранения,
и/или
– конструкция внутри транспортного средства (101) представляет собой конструкцию стены, в частности боковую стену, и мобильное оконечное устройство (106) на этапе регистрации соединяется с конструкцией стены,
и/или
– мобильное оконечное устройство (106) для этапа регистрации жестко, по существу, неподвижно соединено с конструкцией внутри транспортного средства (101),
и/или
– предусмотрено зажимное устройство (110), с помощью которого мобильное оконечное устройство (106) на этапе регистрации соединяется с конструкцией внутри транспортного средства (101),
и/или
– предусмотрен держатель (105.3, 110), с помощью которого мобильное оконечное устройство (106) на этапе регистрации может соединяться с конструкцией внутри транспортного средства (101), причем держатель (110), в частности, расположен в ящике (105.4) транспортного средства, причем ящик (105.4), в частности, запирающийся, и/или держатель (105.3, 110) пространственно соотносится, в частности, с зарядным устройством для оконечного устройства (106),
и/или
– предусмотрен держатель для мобильного оконечного устройства (106), который можно соединять с конструкцией внутри транспортного средства (101), причем держатель, в частности, предназначен для того, чтобы удерживать мобильное оконечное устройство (106) для первого этапа регистрации в задаваемом первом измерительном положении и/или направлении, а для второго этапа регистрации – в задаваемом втором измерительном положении и/или направлении.
14. Система по п.12 или 13, причем
– по меньшей мере одно устройство (109) обработки данных является одним устройством обработки данных транспортного средства (101)
и/или
– по меньшей мере одно устройство (106.4) обработки данных является одним устройством обработки данных мобильного оконечного устройства (106).
15. Мобильное оконечное устройство, в частности мобильный телефон, для установления значения по меньшей мере одного параметра состояния рельсового транспортного средства (101) и/или пути рельсового транспортного средства (101), в частности, для осуществления способа по любому из пп.1-11, включающее в себя
– по меньшей мере один первый датчик сигналов (106.1, 106.2, 106.3) и
– устройство (106.4) обработки данных, причем
– по меньшей мере один первый датчик сигналов (106.1, 106.2, 106.3) предназначен для получения по меньшей мере одного коррелирующего с текущим значением параметра состояния текущего первого сигнала регистрации, отличающееся тем, что
– устройство (106.4) обработки данных предназначено для того, чтобы получать значение по меньшей мере одного параметра состояния с помощью анализа диапазона частот текущего первого сигнала регистрации выше 1-2 Гц, предпочтительно от 4 Гц до 15 кГц, более предпочтительно от 10 Гц до 1 кГц.
и/или
– устройство (106.4) обработки данных предназначено для того, чтобы выдавать текущий первый сигнал регистрации для установления значения по меньшей мере одного параметра состояния на дополнительное устройство (108, 109) обработки данных в таком виде, который позволяет анализ диапазона частот текущего первого сигнала регистрации выше 1-2 Гц, предпочтительно от 4 Гц до 15 кГц, более предпочтительно от 10 Гц до 1 кГц в дополнительном устройстве (108, 109) обработки данных.
| JP 2008081102 A, 10.04.2008 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| JP 2013113775 A, 10.06.2013. | |||

