Настоящее изобретение относится к железнодорожному вагону, содержащему кузов вагона и систему подвески с ходовой частью, поддерживающей кузов вагона. Настоящее изобретение, кроме того, относится к способу обнаружения неисправностей системы подвески указанного железнодорожного вагона.
В настоящее время общеизвестной практикой является обнаружение неисправностей системы подвески железнодорожного вагона, поскольку неисправность системы подвески отрицательно влияет на устойчивость железнодорожного вагона при движении поезда. При этом, как правило, используются вибродатчики и подобные им устройства, фиксирующие фактические значения параметров состояния, являющихся показателями ускорений, действующих на конкретный узел системы подвески вагона. Полученные таким образом данные затем анализируются, чтобы обнаружить наличие чрезмерных ускорений, действующих в системе подвески, что свидетельствует о неисправностях системы подвески. При обнаружении неисправностей подаются соответствующие предупредительные сигналы, свидетельствующие о неисправностях, чтобы во избежание опасных ситуаций были предприняты соответствующие меры. Указанные системы описаны, например, в документе WO 01/81147 A1.
Однако недопустимые и потенциально опасные ситуации во время эксплуатации железнодорожного вагона могут возникать не только в связи с несоответствующей вибрацией ходовой части железнодорожного вагона. Например, чрезмерное поперечное перемещение кузова вагона относительно ходовой части может привести к нарушению кинематического габарита при движении железнодорожного вагона на определенном участке железнодорожного полотна. Во избежание нарушений кинематического габарита, независимо от обстоятельств, внешний контур кузова вагона и система подвески железнодорожного вагона, как правило, должны быть специально приспособлены к железнодорожному полотну, на котором железнодорожный вагон должен эксплуатироваться.
Хотя при движении железнодорожного вагона по железнодорожному полотну пассивная система подвески позволяет эффективно избежать нарушения кинематического габарита, имеются недостатки, один из которых состоит в ограничении внешнего контура кузова вагона, что снижает вместимость железнодорожного вагона, и другим недостатком является довольно жесткая подвеска кузова вагона, что нежелательно с точки зрения комфорта пассажиров.
При использовании активной системы подвески, обеспечивающей, например, активную регулировку наклона кузова вагона относительно ходовой части (т.е. регулировку угла наклона или угла крена, соответственно, кузова вагона относительно оси наклона или оси крена, соответственно, продолжающейся в продольном направлении кузова вагона) также может возникнуть проблема. Например, при неисправности системы регулирования наклона в указанных активных системах подвески может возникнуть чрезмерный сдвиг кузова вагона относительно ходовой части, приводящий к нарушениям кинематического габарита. То же самое относится к активному регулированию качательного движения кузова вагона.
В указанных активных системах подвески может возникнуть дополнительная проблема, состоящая в том, что, например, неисправность системы регулирования наклона может привести к созданию противоположных боковых смещений кузова вагона относительно ведущей ходовой части и тянущей ходовой части. При такой ситуации, в связи со специфической кинематикой системы регулирования наклона, кузов вагона может оказаться под воздействием скручивающей нагрузки, в результате чего, некоторые из колес ходовой части будут разгружаться, что крайне нежелательно, т.к. возрастает риск крушения.
В связи с вышеизложенным задачей настоящего изобретения является создание железнодорожного вагона, в котором перечисленные недостатки будут преодолены, по меньшей мере, частично. Другая задача настоящего изобретения заключается в создании железнодорожного вагона, который будет обладать высокой вместимостью, а также будет обеспечивать высокий уровень пассажирского комфорта при гарантии безопасности и надежности в любых условиях. В конечном счете, задача настоящего изобретения состоит в том, чтобы предложить способ обнаружения неисправностей системы подвески, позволяющий реализовать указанный железнодорожный вагон.
Поставленная задача решена посредством железнодорожного вагона, охарактеризованного признаками пункта 1 формулы настоящего изобретения. Также поставленная задача решена посредством способа, охарактеризованного признаками пункта 11 формулы настоящего изобретения.
Техническая идея настоящего изобретения основана на безопасности и надежности эксплуатации железнодорожного вагона, обеспечивающего большую вместимость и одновременно высокий комфорт пассажиров, а также на снижении риска самопроизвольных нарушений кинематического габарита железнодорожного вагона при движении по конкретному участку железнодорожного полотна или на снижении риска крушения, что может быть достигнуто при осуществлении системы мониторинга, контролирующей относительное пространственное расположение заданной первой базовой части, тесно связанной с ходовой частью, и заданной второй базовой части, тесно связанной с кузовом вагона. Мониторинг относительного пространственного расположения позволяет выполнять анализ неисправностей, идентифицируя ситуацию, связанную с неисправностью, когда превышен заданный уровень риска нарушения кинематического габарита или заданный уровень риска крушения. Если обнаружена ситуация, связанная с неисправностью, подается сигнал, свидетельствующий о неисправности, на основании указанного сигнала принимаются определенные контрмеры для значительного снижения уровня риска.
Следует учесть, что согласно настоящему изобретению, относительное пространственное расположение ходовой части и кузова вагона может быть определено с одной или несколькими из шести степеней свободы (DOF), возможных в пространстве. Кроме того, относительное перемещение ходовой части и кузова вагона с одной или несколькими из указанных степеней свободы можно рассмотреть при анализе неисправностей. Точнее, любое изменение положения (т.е. перемещение с любой из трех поступательных степеней свободы), а также любое изменение ориентации (т.е. перемещение с любой из трех вращательных степеней свободы) можно рассматривать (отдельно или в произвольной комбинации) при анализе неисправностей.
Мониторинг системы, обеспечивающий выявление неисправностей, позволяет реализовать активные системы подвески с активным регулированием относительного пространственного расположения ходовой части и кузова вагона. При указанном активном регулировании можно максимизировать наружный контур и, следовательно, вместимость кузова вагона, благодаря тому, что пространственное расположение кузова вагона относительно ходовой части (и, следовательно, относительно кинематического габарита) может быть активно адаптировано к данному кинематическому габариту. Кроме того, указанная активная система подвески может быть оптимизирована с точки зрения пассажирского комфорта, поскольку ее жесткость и демпфирующие характеристики могут быть активно адаптированы к положению железнодорожного вагона в определенный момент движения. Таким образом, согласно настоящему изобретению, благодаря выявлению неисправностей посредством мониторинга, достигаются указанные преимущества без увеличения риска нарушения кинематического габарита или риска крушения.
Таким образом, можно реализовать активную систему подвески железнодорожного вагона, которая будет удовлетворять современным требованиям по обеспечению безопасности. Для повышения уровня безопасности в системе могут быть предусмотрены резервные элементы, взаимодействующие при анализе неисправностей, и/или могут быть предусмотрены надежные испытательные средства (например, тестирующая система, которая регулярно контролирует правильность функционирования соответствующего элемента). Согласно настоящему изобретению может быть обеспечена система подвески железнодорожного вагона, отвечающая требованиям по обеспечению безопасности, которые определены в стандартах, например, IEC 61508, IEC 61508, EN50126 - EN50129. Точнее, может быть достигнут уровень полноты безопасности (SIL как определено в некоторых из этих стандартов) вплоть до 2 (SIL2) и выше.
Таким образом, согласно первому аспекту, изобретение относится к железнодорожному вагону, содержащему кузов вагона и систему подвески, причем указанная система подвески содержит ходовую часть, поддерживающую указанный кузов вагона. Предусмотрено сенсорное устройство и регулирующее устройство. Сенсорное устройство фиксирует фактическое значение, по меньшей мере, одного параметра состояния, указанный параметр состояния характеризует относительное пространственное расположение первой базовой части сенсорного устройства, тесно связанной с одним из участков ходовой части, и второй базовой части сенсорного устройства, тесно связанной с кузовом вагона. Регулирующее устройство выполняет анализ неисправностей с использованием фактического значения указанного параметра состояния, согласно указанному анализу неисправностей оценивается выполнение, по меньшей мере, одного заданного критерия неисправности. В конечном счете, регулирующее устройство обеспечивает подачу сигнала, свидетельствующего о неисправности, если в результате указанного анализа неисправностей обнаруживается, что критерий неисправностей выполняется.
В этом контексте следует учитывать, что любая из указанных первой и второй базовых частей не обязательно должна быть жестко связана с одним из участков ходовой части и кузовом вагона, соответственно. Вернее, может быть достаточно точных данных об относительном пространственном расположении соответствующей базовой части и тесно связанного элемента, чтобы оценить фактическое относительное пространственное расположение, имеющее существенное значение.
Кроме того, следует отметить, что при простейшем анализе неисправностей может использоваться одно фактическое значение параметра состояния, зафиксированное сенсорным устройством, для сравнения с единичным пороговым значением, чтобы выявить наличие ситуации, связанной с неисправностью (например, если зафиксированное фактическое значение параметра состояния превышает пороговое значение). Согласно некоторым вариантам осуществления изобретения для проведения анализа неисправностей может использоваться множество зафиксированных значений, чтобы по результатам анализа определить, выполняется ли один или нескольких заданных критериев неисправностей. К примеру, при данном множестве N значений параметра состояния, зафиксированных в данном временном интервале, по результатам анализа неисправностей можно определить, превышен ли данный порог неисправностей более чем в М раз (критерий неисправности). Если подтверждается превышение порога неисправности, регулирующее устройство, устанавливая наличие неисправности, подает сигнал, свидетельствующий о неисправности.
Также следует учесть, что при анализе неисправностей, несомненно, может использоваться один или несколько дополнительных произвольно усложненных критериев неисправности (кроме того, или в качестве альтернативы). В частности, при анализе неисправностей может рассматриваться, по меньшей мере, один дополнительный параметр состояния (т.е. другой параметр состояния), который фиксируется сенсорным устройством.
Параметр состояния может представлять собой, соответственно, любой параметр, который является показателем относительного пространственного расположения (положения и/или ориентации) первой базовой части и второй базовой части (и, следовательно, ходовой части и кузова вагона) с одной или с несколькими из возможных шести степеней свободы. Соответствующая выбранная степень(и) свободы зависит(ят) от направления соответствующего перемещения(й), которое как считается, может привести к нарушению кинематического габарита или к недопустимому повышению риска крушения.
Предпочтительно, железнодорожный вагон определяет продольное направление, поперечное направление и высотное направление, и параметр состояния характеризует относительное смещение первой базовой части и второй базовой части в поперечном направлении. Таким образом, при анализе неисправностей может рассматриваться поперечное смещение (также называемое боковым смещением или качательным движением) кузова вагона относительно ходовой части. В этом состоит преимущество анализа неисправностей, поскольку указанное поперечное смещение является, как правило, основным фактором, ограничивающим кинематический габарит, в частности, когда железнодорожный вагон со сравнительно длинным кузовом вписывается в кривую относительно малого радиуса (т.е. с относительно малым радиусом кривизны). К тому же, при оценке риска крушения избыточное противоположное поперечное смещение ведущей ходовой части и тянущей ходовой части может иметь решающее значение.
Кроме того, или в качестве альтернативы, параметр состояния может характеризовать угловое смещение первой базовой части и второй базовой части относительного высотного направления при движении рыскания. Опять же, когда железнодорожный вагон, в частности, со сравнительно длинным кузовом вписывается в кривую железнодорожного полотна относительно малого радиуса, указанное движение рыскания представляет собой поперечное смешение кузова вагона.
В зависимости от типа железнодорожного вагона, в частности в зависимости от длины кузова вагона (т.е. его размера в продольном направлении), характеристики сенсорного устройства и/или регулирующего устройства могут быть определены статическим методом. Например, если вагон, в частности, имеет относительно короткий кузов, то для обнаружения чрезмерного относительного бокового или поперечного смещения ходовой части и кузова вагона, может быть достаточно простого сенсорного устройства с характеристикой статической чувствительности в поперечном направлении.
Однако если железнодорожный вагон, в частности, имеет длинный кузов, то в местах, отдаленных от ходовой части, происходит значительное поперечное смещение кузова относительно центра железнодорожного полотна, в таком случае, предпочтительно, чтобы сенсорное устройство и/или регулирующее устройство обеспечивало адаптацию анализа неисправностей к фактическим условиям движения железнодорожного вагона. При этом фактические условия движения могут определяться, например, ходовой скоростью железнодорожного вагона и/или направлением движения железнодорожного вагона и/или геометрией железнодорожного полотна, по которому в данный момент движется железнодорожный вагон. Геометрию железнодорожного полотна может характеризовать любой соответствующий параметр железнодорожного полотна. Геометрия железнодорожного полотна, предпочтительно, характеризуется, по меньшей мере, одним из параметров, а именно, кривизной железнодорожного полотна, возвышением наружного рельса и изгибом железнодорожного полотна. Таким образом, можно легко определить допустимые пределы относительного смещения ходовой части и кузова вагона (в зависимости от условий эксплуатации) и при анализе неисправностей учитывать указанные пределы.
К примеру, если вагон имеет сравнительно длинный кузов, то в области ходовой части допустимая величина поперечного смещения кузова вагона относительно ходовой части должна быть значительно меньше на криволинейном участке железнодорожного полотна с возвышающимся наружным рельсом, чем на прямом горизонтальном участке железнодорожного полотна. Следует учесть, что в отдаленном от ходовой части участке кузова вагона значительное поперечное смещение кузова вагона (относительно центра железнодорожного полотна) связано только с геометрией железнодорожного полотна, которой соответствует данный кинематический габарит, таким образом, в области ходовой части (где фиксируется указанное смещение) допустимо значительно меньшее дополнительное поперечное смещение.
Согласно предпочтительному варианту выполнения изобретения производится активная адаптация анализа неисправностей к фактическому режиму движения или к режиму эксплуатации железнодорожного вагона. С этой целью, предпочтительно, сенсорное устройство содержит датчик состояния движения, фиксирующий фактическое значение параметра состояния движения, характеризующего фактическое состояние движения железнодорожного вагона в данный момент. Регулирующее устройство выполняет анализ неисправностей на основе фактического значения параметра состояния движения, зафиксированного датчиком состояния движения.
Для анализа неисправностей может быть использован любой соответствующий параметр, характеризующий фактическое состояние движения железнодорожного вагона. Например, адаптация анализа неисправностей проводится на основе, по меньшей мере, одного параметра (в качестве параметра состояния движения), характеризующего фактическую кривизну железнодорожного полотна, по которому в данный момент движется железнодорожный вагон. Как указано выше, регулирующее устройство может корректировать допустимый предел поперечного смещения (применяемый для анализа неисправностей), в зависимости от параметра состояния движения, а именно от кривизны железнодорожного полотна, по которому в данный момент движется железнодорожный вагон.
Кроме того, или в качестве альтернативы, сенсорное устройство может изменять свои функциональные характеристики фиксации параметра состояния соответственно фактическому значению параметра состояния движения. Изменение функциональных характеристик сенсорного устройства может выполняться активным способом, т.е. соответственно фактическому значению параметра состояния движения, которое воспринимается и/или фиксируется сенсорным устройством.
Однако согласно другим предпочтительным вариантам выполнения изобретения, в которых сенсорное устройство имеет простую и надежную конструкцию, может быть осуществлено исключительно пассивное решение. При таком исключительно пассивном решении функциональные характеристики сенсорного устройства (например, его чувствительность) непроизвольно (пассивно) изменяются в зависимости от конкретного состояния движения железнодорожного вагона.
Такая пассивная адаптация может быть достигнута только за счет соответствующего расположения элементов сенсорного устройства. Например, первая и вторая базовая части могут быть размещены таким образом, чтобы изменялось их относительное положение в поперечном направлении при движении рыскания кузова вагона относительно ходовой части (т.е. при повороте относительно оси рыскания, определяемой системой подвески и параллельной высотному направлению) в зависимости от кривизны участка железнодорожного полотна, в который в настоящий момент вписывается железнодорожный вагон. Может быть выбрано такое расположение первой и второй частей сенсорного устройства относительно оси рыскания, чтобы при движении рыскания происходило уменьшение поперечного смещения, при этом уменьшение поперечного смещения является допустимым до тех пор, пока не превышен установленный порог, свидетельствующий о неисправности.
Кроме того, согласно другим вариантам выполнения изобретения, может быть подобрана такая геометрия и/или чувствительность первой и/или второй базовых частей, чтобы обеспечивалась требуемая пассивная адаптация функциональной характеристики сенсорного устройства. Например, сенсорный элемент (формирующий одну из базовых частей сенсорного устройства, т.е. первую или вторую) может взаимодействовать с эталонным элементом (формирующим другую из базовых частей, т.е. вторую или первую), обеспечивая сигнал обнаружения. Сенсорный элемент может иметь чувствительность, которая зависит от направления, т.е. чувствительность, зависящую от соответствующего направления обнаружения (например, сигнал обнаружения обеспечивается в соответствующем направлении обнаружения при заданных, в конечном счете, разных расстояниях между первым, т.е. сенсорным элементом и вторым, т.е. эталонным элементом). Сенсорный элемент, имеющий зависящую от направления чувствительность, может находить конкретное применение при определенном изменении относительного положения первой и второй базовой части (т.е. при изменении относительного положения ходовой части и кузова вагона), причем указанный сигнал обнаружения соответствует текущей ситуации эксплуатации и обеспечивается при различных относительных поперечных смещениях ходовой части и кузова вагона.
В конечном счете, сенсорный элемент с независимой от направления чувствительностью (и приемлемой зоной обзора) также может обеспечить указанный результат за счет изменения геометрии эталонного элемента, позволяющего адаптировать анализ неисправностей к соответствующей ситуации эксплуатации или соответственно, к состоянию движения железнодорожного вагона в данный момент.Очевино, что могут использоваться различные способы адаптации анализа неисправностей и их комбинации.
Таким образом, согласно предпочтительным вариантам выполнения железнодорожного вагона согласно изобретению сенсорное устройство содержит датчик параметра состояния, фиксирующий фактическое значение параметра состояния в направлении считывания. Датчик, определяющий параметр состояния, имеет функциональную характеристику в направлении считывания, в частности чувствительность в направлении считывания, которая изменяется в зависимости от фактического состояния движения железнодорожного вагона. Датчик, определяющий параметр состояния, может иметь любую функциональную характеристику, пригодную для соответствующей адаптации. Предпочтительно, датчик, по меньшей мере, секционного типа, определяющий параметр состояния, имеет линейную и/или сферическую функциональную характеристику.
В несложных и надежных вариантах конструкции согласно изобретению, датчик, определяющий параметр состояния, содержит сенсорный элемент и тесно связанный с ним эталонный элемент, при этом сенсорный элемент фиксирует величину, которая характеризует, по меньшей мере, одно расстояние между сенсорным элементом и эталонным элементом в качестве фактического значения параметра состояния в направлении считывания. Сенсорный элемент формирует либо первую базовую часть, либо вторую базовую часть, а эталонный элемент формирует другую из базовых частей, т.е. первую базовую часть или вторую базовую часть. Как указано выше, сенсорный элемент и эталонный элемент могут быть размещены таким образом, что, по меньшей мере, в направлении считывания относительное положение сенсорного элемента и эталонного элемента изменяется и зависит от фактического состояния движения железнодорожного вагона, благодаря чему обеспечивается изменение функциональных характеристик в направлении считывания. В несложных конструкциях сенсорный элемент и эталонный элемент могут быть размещены на некотором расстоянии от оси рыскания, в частности на некотором расстоянии в продольном направлении от оси рыскания, проходящей в системе подвески между ходовой частью и кузовом вагона.
В принципе, в сенсорном устройстве может использоваться любой сенсорный элемент, обеспечивающий сигнал, который характеризует относительное пространственное расположение первой и второй базовых частей. Предпочтительно, сенсорное устройство содержит, по меньшей мере, один датчик расстояния, фиксирующий, по меньшей мере, одно значение, характеризующее расстояние между первой базовой частью и второй базовой частью.
Следует отметить, что сенсорное устройство не обязательно должно обеспечивать непрерывное измерение относительного пространственного расположения первой и второй базовых частей в одном или нескольких направлениях. Точнее, для выполнения анализа неисправностей может быть достаточно, чтобы датчик обеспечивал соответствующий сигнал обнаружения только тогда, когда достигается заданное относительное пространственное расположение первой и второй базовых частей. Например, простой двоичный сигнал может быть достаточным подтверждением превышения определенного расстояния между первой и второй базовыми частями (например, уровень сигнала: 1) или отсутствия превышения (например, уровень сигнала: 0). Таким образом, предпочтительно, по меньшей мере, один датчик расстояния может быть расположен вблизи выключателя, который, как правило, обеспечивает указанный простой двоичный сигнал.
Сенсорное устройство, в принципе, может быть размещено в любом подходящем месте железнодорожного вагона, позволяющем зафиксировать фактическое значение требуемого параметра состояния. Предпочтительно, кузов вагона поддерживается на ходовой части посредством вспомогательного пружинного блока системы подвески, и первая базовая часть и вторая базовая часть размещены кинематически параллельно, по меньшей мере, одному из участков вспомогательного пружинного блока.
Как упомянуто выше, вторая базовая часть не обязательно должна быть жестко соединена с кузовом вагона. Таким образом, согласно предпочтительным вариантам выполнения изобретения первая базовая часть соединена с первым участком ходовой части, в то время как вторая базовая часть соединена со вторым участком ходовой части, в частности с поперечиной, поддерживаемой на первом участке ходовой части посредством вспомогательного пружинного блока. Однако согласно другим вариантам выполнения конструкции вторая базовая часть также может быть соединена с кузовом вагона.
Кроме того, первая и вторая базовые части могут иметь любое походящее местоположение. Согласно настоящему изобретению в определенных, достаточно компактных вариантах выполнения конструкции первая базовая часть и/или вторая базовая часть интегрированы в элемент вспомогательного пружинного блока, в частности в пневматическую пружину вспомогательного пружинного блока. Сравнительно компактная конструкция также может быть обеспечена, если первая базовая часть и/или вторая базовая часть интегрированы в исполнительный механизм, обеспечивающий корректирующее усилие и/или корректирующий перемещение ходовой части и кузова вагона.
Сигнал, свидетельствующий о неисправности, в железнодорожном транспорте может использоваться по-разному. Например, в самом простом случае, сигнал, свидетельствующий о неисправности, инициирует аудио и/или видеосигнал, который информирует машиниста поезда и/или центр дистанционного управления о ситуации с неисправностью. Машинист и/или центр дистанционного управления могут затем приступить к принятию соответствующих контрмер по преодолению потенциально опасной ситуации, вызванной неисправностью.
Однако, предпочтительно, по сигналу, свидетельствующему о неисправности, автоматически инициируются соответствующие контрмеры. К примеру, непосредственно сигнал, свидетельствующий о неисправности, может использоваться для регулирования элементов активной системы подвески. Таким образом, согласно предпочтительным вариантам выполнения изобретения система подвески содержит прилагающее усилие устройство, при этом в результате действия прилагающего усилие устройства, контролируемого регулирующим устройством, в системе подвески оказывается влияние, по меньшей мере, на один параметр состояния.
В зависимости от сигнала, свидетельствующего о неисправности, режим работы прилагающего усилие устройства, предпочтительно, изменяется, чтобы не допускалась несоответствующая эксплуатация железнодорожного вагона при указанной ситуации, вызванной неисправностью. Это может быть выполнено различными способами. К примеру, прилагающее усилие устройство при получении сигнала, свидетельствующего о неисправности, переключается в режим работы, предусмотренный для противодействия любому смещению, которое могло бы потенциально ухудшить ситуацию с неисправностью.
В определенных вариантах конструкции согласно изобретению само прилагающее усилие устройство может явиться потенциальным источником неисправности, в таком случае, предпочтительно, прилагающее усилие устройство переключается в неактивный режим работы в ответ на сигнал, свидетельствующий о неисправности.
Кроме того, в неактивном режиме работы прилагающее усилие устройство способно оказывать усилие возврата в системе подвески, при этом действие усилия возврата состоит в том, чтобы вернуть кузов вагона в заданное нейтральное положение относительно ходовой части. Таким образом, может быть достигнуто надежное снижение риска, связанного с неисправностью.
Прилагающее усилие устройство может иметь любую подходящую конструкцию и может быть расположено в любом подходящем месте в системе подвески. Предпочтительно, прилагающее усилие устройство содержит исполнительный механизм, в частности механизм наклона, корректирующий угол наклона кузова вагона относительно оси наклона, проходящей в продольном направлении железнодорожного вагона. Кроме того, или в качестве альтернативы, прилагающее усилие устройство содержит демпфирующее устройство, в частности устройство, демпфирующее рыскание, демпфирующее относительное смещение ходовой части и вагона. Как упомянуто выше, кроме того, или в качестве варианта, первая базовая часть и/или вторая базовая часть могут быть интегрированы в элемент прилагающего усилие устройства, в частности в исполнительный механизм прилагающего усилие устройства, что позволяет создать предпочтительное компактное устройство.
В этом контексте следует учитывать, что первая и вторая базовые части могут быть любыми соответствующими частями прилагающего усилия устройства, выполняющими при приложении усилия относительное перемещение в системе подвески и оказывающими влияние, по меньшей мере, на один параметр состояния. Кроме того, следует учитывать, что в этом случае не обязательно должно быть непосредственно измерено относительное смещение первой и второй базовых частей. Предпочтительно, как указано выше, сенсорное устройство может фиксировать фактическое значение, по меньшей мере, одного параметра состояния, характеризующего относительное пространственное расположение первой и второй базовых частей.
Например, если прилагающее усилие устройство является гидравлическим исполнительным механизмом с поршнем и цилиндром (совместно составляющими рабочую камеру исполнительного механизма), сенсорное устройство может просто фиксировать степень заполнения рабочей камеры (соответствующими средствами), что также характеризует относительное положение поршня (например, формирующего первый эталонный элемент) и цилиндра (например, формирующего второй эталонный элемент).
Кроме того, настоящее изобретение относится к способу обнаружения неисправностей в системе подвески железнодорожного вагона, содержащего кузов вагона и систему подвески, которая содержит ходовую часть, поддерживающую кузов вагона, причем фиксируется фактическое значение, по меньшей мере, одного параметра состояния, при этом указанный параметр состояния характеризует относительное пространственное расположение первой базовой части, тесно связанной с ходовой частью, и второй базовой части, тесно связанной с кузовом вагона. Кроме того, анализ неисправностей выполняется с использованием указанного фактического значения указанного параметра состояния, причем согласно указанному анализу неисправностей оценивается выполнение, по меньшей мере, одного заданного критерия неисправностей. Обеспечивается подача сигнала, свидетельствующего о неисправности, если в результате анализа неисправностей выявлено, что критерий неисправностей выполняется. Предлагаемый согласно изобретению способ позволяет реализовать описанные выше преимущества вариантов конструкции железнодорожного вагона, описанных ранее.
Дополнительные варианты конструкции согласно настоящему изобретению будут очевидны из зависимых пунктов формулы изобретения и из следующего описания предпочтительных вариантов конструкции согласно настоящему изобретению со ссылкой на прилагаемые чертежи.
Фиг.1 - разрез конструкции железнодорожного вагона, согласно предпочтительному варианту выполнения настоящего изобретения (разрез выполнен по линии 1-1 вагона, представленного на фиг.3), к которому может быть применен предпочтительный вариант способа согласно изобретению.
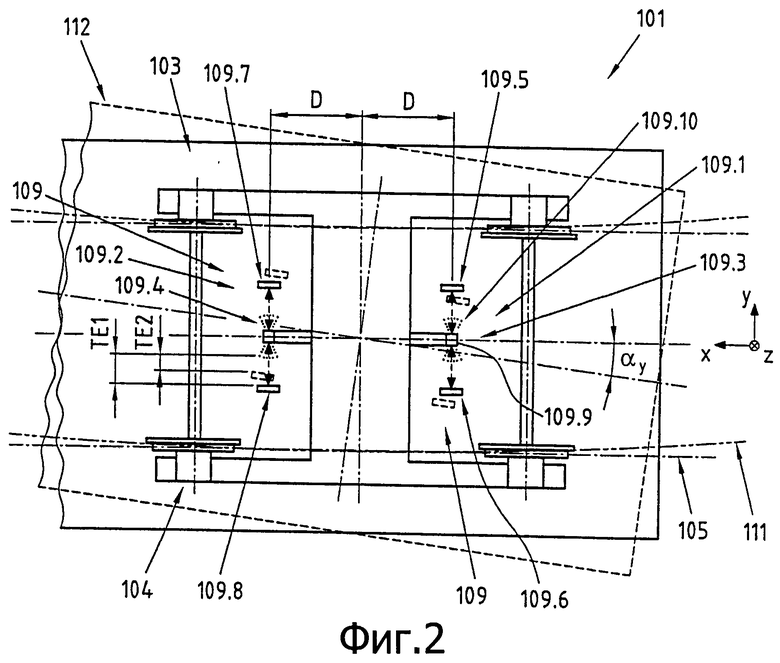
Фиг.2 - схематичный вид снизу части железнодорожного вагона, представленного на фиг.1, (т.е. при рассмотрении от уровня железнодорожного полотна, показанного линией II-II на фиг.3).
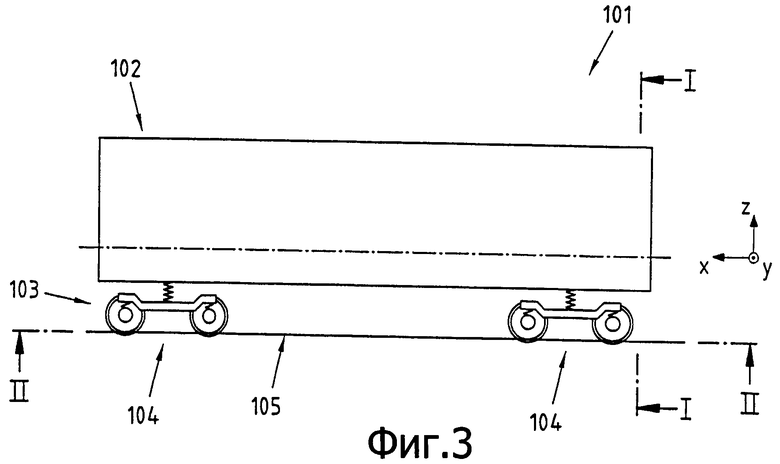
Фиг.3 - схематичный вид сбоку железнодорожного вагона, представленного на фиг.1.
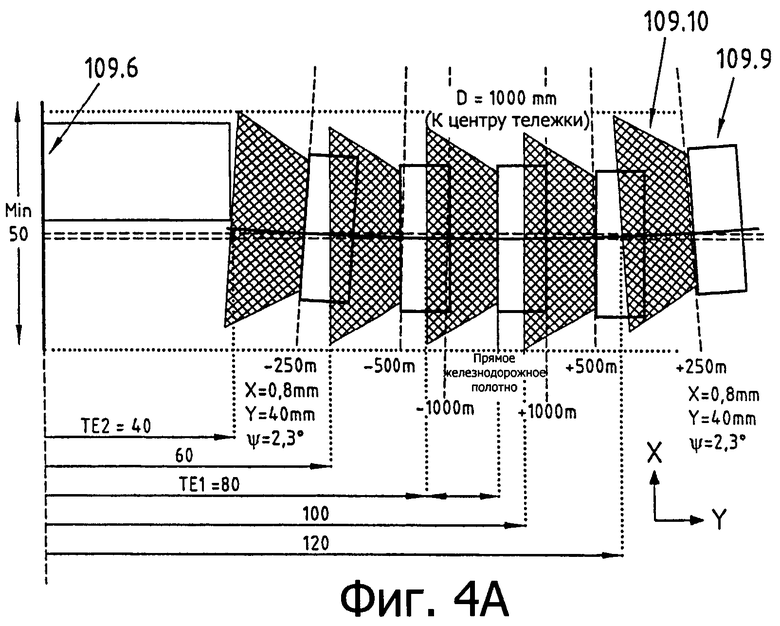
Фиг.4А - схема смещения сенсорных элементов и эталонных элементов в железнодорожном вагоне, представленном на фиг.1, в зависимости от кривизны участка железнодорожного полотна.
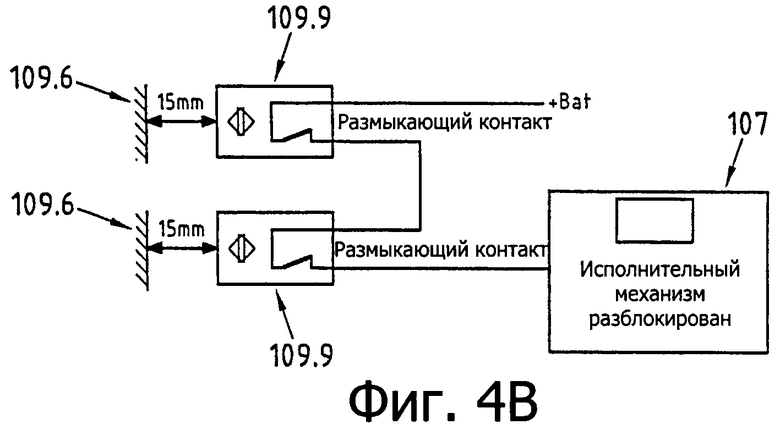
Фиг.4В - блок-схема монтажа сенсорных элементов в железнодорожном вагоне, представленном на фиг.1.
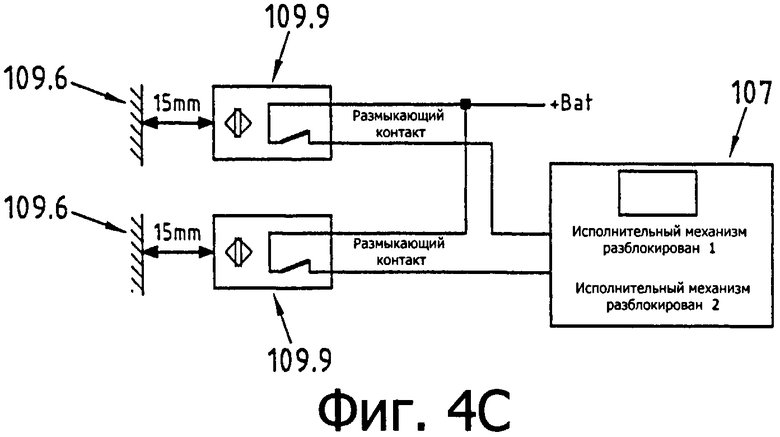
Фиг.4С - блок-схема монтажа сенсорных элементов, в качестве альтернативы блок-схеме, представленной на фиг.4 В.
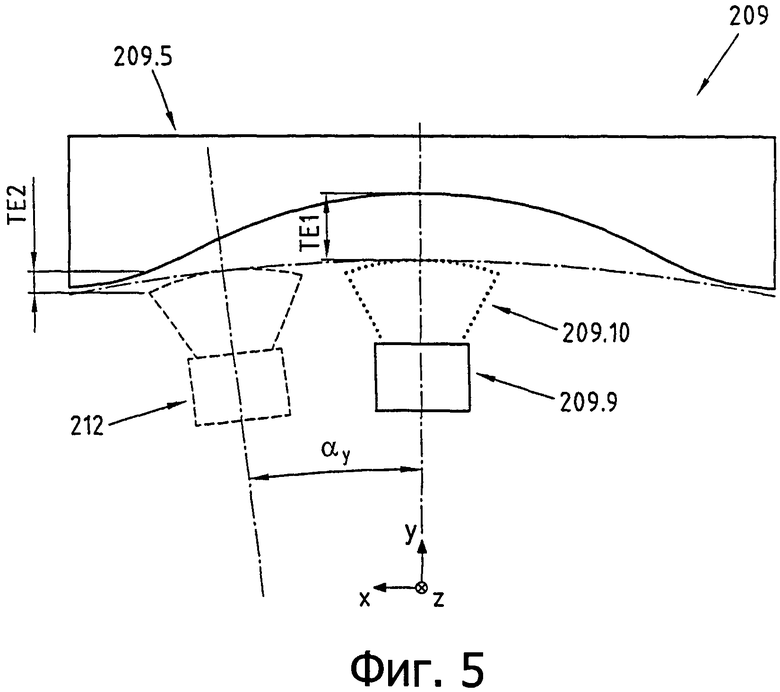
Фиг.5 - конструкция сенсорного устройства согласно предпочтительному варианту выполнения настоящего изобретения.
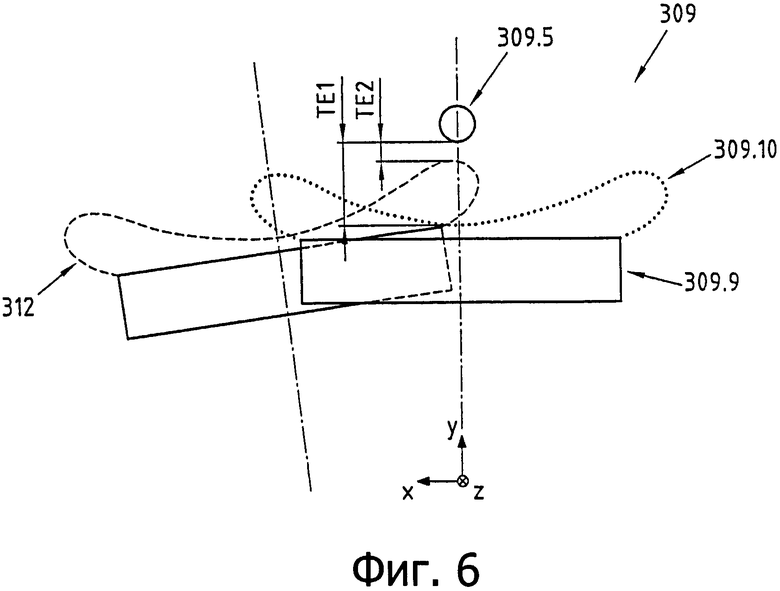
Фиг.6 - конструкция сенсорного устройства согласно еще одному предпочтительному варианту выполнения настоящего изобретения.
Первый вариант выполнения изобретения
На фиг.1-3 представлен предпочтительный вариант конструкции железнодорожного вагона 101 согласно настоящему изобретению, который далее будет описываться более подробно. Для облегчения понимания приведенного ниже описания изобретения на чертежах показана система координат "xyz", причем, когда железнодорожный вагон движется по прямому горизонтальному железнодорожному полотну, ось x определяет продольное направление железнодорожного вагона 101, ось y определяет поперечное направление железнодорожного вагона 101 и ось z определяет высотное направление железнодорожного вагона 101.
Железнодорожный вагон 101 содержит кузов 102 вагона, поддерживаемый системой 103 подвески. Система 103 подвески содержит две ходовые части 104, которые опираются на железнодорожное полотно 105 и поддерживают кузов 102 вагона. Каждая ходовая часть 104 содержит два набора колес 104.1, поддерживаемых на раме 104.2 ходовой части посредством основного пружинного блока 104.3. Рама 104.2 ходовой части поддерживает кузов 102 вагона посредством вспомогательного пружинного блока 104.4.
Система 103 подвески содержит активный механизм 106 наклона, расположенный кинематически параллельно вспомогательному пружинному блоку 104.4. Механизм 106 наклона формирует активную часть системы 103 подвески и служит для корректировки угла наклона или угла αw крена относительно оси наклона или оси крена, проходящей параллельно продольному направлению (ось x) железнодорожного вагона 101. Таким образом, механизм 106 наклона содержит обычную роликовую опору 106.1, соединенную шарнирно с рамой 104.2 ходовой части и с кузовом 102 вагона. Роликовая опора 106.1 содержит внутри шарнирные подвески 106.2, обеспечивающие известным образом наклон при боковом смещении кузова 102 вагона, т.е. смещение кузова 102 вагона относительно ходовой части 104 в поперечном направлении (по оси y).
Кроме того, механизм 106 наклона содержит прилагающее усилие устройство, которое является активным и представляет собой наклоняющий исполнительный механизм 106.3, соединенный как с рамой 104.2 ходовой части, так и с кузовом 102 вагона. Механизм 106 наклона, контролируемый регулирующим устройством, представляющим собой блок 107 управления, служит для активной корректировки угла α наклона в зависимости от состояния движения железнодорожного вагона 101 в данный момент. Как правило, благодаря алгоритмам регулирования наклона, которое осуществляется блоком 107 управления, исключается (при правильной эксплуатации) любое нарушение кинематического габарита 105.1, определенного для соответствующего железнодорожного полотна 105, по которому движется железнодорожный вагон 101.
Безусловно, кинематический габарит 105.1 должен соблюдаться при любом эксплуатационном режиме каждого железнодорожного вагона, который движется по железнодорожному полотну 105 даже, в частности, при существующих неисправностях любых активных элементов системы наклона железнодорожного вагона. Для железнодорожных вагонов обычного типа указанное требование выполняется, как за счет ограничения внешнего контура кузова вагона, так и за счет ограничения поперечного смещения кузова вагона (например, с использованием механических ограничителей и т.п.). Однако при сужении внешнего контура кузова вагона имеется недостаток, который состоит в уменьшении вместимости транспортного средства. При ограничении поперечного смещения с использованием механических ограничителей также имеются определенные недостатки, поскольку указанные ограничители должны быть разработаны с учетом худшего варианта, т.е. железнодорожный вагон при данном кинематическом габарите эксплуатируется с очень жестким ограничением поперечных смещений. Следовательно, в конечном счете, при эксплуатационных условиях, которые не являются худшими (т.е. когда требуются менее серьезные ограничения поперечных смещений), не может быть получена желательная амплитуда поперечных смещений, которая при данном кинематическом габарите является допустимой.
Чтобы избежать этих проблем, железнодорожный вагон 101 согласно изобретению содержит сенсорное устройство 109, которое соединено с блоком 107 управления. Предусмотрено два местоположения 109.1 и 109.2 датчиков 109.3 и 109.4 сенсорного устройства 109, тесно связанных с соответствующими эталонными элементами 109.5-109.8. Датчики 109.3 и 109.4 механически соединены с рамой 104.2 ходовой части, при этом эталонные элементы 109.5-109.8 (пластинчатой формы) механически соединены с кузовом 102 вагона, причем в нейтральном положении, показанном на фиг.1 и 2, датчики 109.3 и 109.4 находятся на определенном расстоянии в поперечном направлении (в направлении оси y) от поверхности соответствующих, тесно связанных с ними эталонных элементов 109.5-109.8.
Согласно настоящему изобретению датчики 109.3 и 109.4 формируют первые базовые части сенсорного устройства 109, а вторые базовые части сенсорного устройства 109 сформированы эталонными элементами 109.5-109.8. Датчики 109.3 и 109.4 содержат по два сенсорных элемента 109.9, каждый из которых тесно связан с одним из эталонных элементов 109.5-109.8.
Таким образом, в представленном варианте выполнения конструкции предусмотрено восемь сенсорных элементов 109.9. Тем не менее, в другом варианте выполнения конструкции согласно изобретению, в частности, количество сенсорных элементов может быть другим, в зависимости от выбранного уровня резервирования и требуемого алгоритма неисправности. Предпочтительно, количество сенсорных элементов может составлять, по меньшей мере, два, вплоть до восьми.
Каждый сенсорный элемент 109.9 имеет заданную функциональную характеристику или, соответственно, чувствительность в ограниченной зоне 109.10 обзора, главным образом, в поперечном направлении (по оси y). В представленном варианте выполнения конструкции каждый датчик 109.3 и 109.4 является простым датчиком расстояния, разработанным по типу бесконтактного выключателя. Каждый сенсорный элемент 109.9 обеспечивает двоичный сигнал, точнее, издается сигнал с уровнем "0", когда эталонные элементы 109.5-109.8, тесно связанные с соответствующими сенсорными элементами, не перекрывают зону обзора 109.10, в противном случае, когда эталонные элементы 109.5-109.8 перекрывают зону обзора 109.10, издается сигнал с уровнем "1".
Таким образом, согласно настоящему изобретению сигнал, издаваемый каждым сенсорным элементом 109.9, свидетельствует о фактическом значении параметра состояния, который характеризует относительное пространственное расположение соответствующих первых базовых частей (соответственно, датчиков 109.3 и 109.4) и тесно связанных с ними вторых базовых частей (соответственно, эталонных элементов 109.5-109.8), а именно их взаимное расположение в поперечном направлении (по оси y). Поскольку первые и вторые базовые части соединены, соответственно, с ходовой частью 104 и кузовом 102 вагона, указанные фактические значения параметра состояния также характеризуют относительное пространственное расположение ходовой части 104 и кузова 102 вагона в поперечном направлении (по оси y).
Блок 107 управления предназначен для регулирования работы исполнительного механизма 106.3, чтобы при любых условиях эксплуатации или движения железнодорожного вагона 101 соблюдался кинематический габарит 105.1 и не превышался данный уровень риска крушения. Таким образом, блок управления принимает сигналы от сенсорных элементов 109.9 и выполняет анализ неисправностей с использованием указанных сигналов.
При простейшем анализе неисправностей фактическое значение сигналов, обеспеченных соответствующим сенсорным устройством 109, используется для сравнения с единичным пороговым значением, чтобы выявить наличие ситуации, связанной с неисправностью. Блок 107 управления получает простые двоичные сигналы, издаваемые соответствующим сенсорным устройством 109, и просто проверяет, имеет ли один из сигналов, издаваемых сенсорным элементом 109.9, уровень "1" (т.е. блок 107 управления выполняет проверку, достигло ли порогового значения "1" одно из фактических зафиксированных значений параметра состояния). Если подтверждается достижение порогового значения, т.е. критерий неисправности выполняется, блок 107 управления издает сигнал, свидетельствующий о неисправности.
Однако в других вариантах выполнения изобретения для проведения анализа неисправностей может использоваться данное множество дискретных величин N сигналов сенсорного элемента 109.9 в данном временном интервале Т, чтобы определить превышен ли данный порог неисправности более чем в М раз (критерий неисправности). Если подтверждается превышение порога неисправности, блок 107 управления, устанавливая наличие неисправности, подает сигнал, свидетельствующий о неисправности.
В представленном варианте выполнения конструкции блок 107 управления использует сигнал, свидетельствующий о неисправности, чтобы с помощью сигнального устройства 113 информировать машиниста поезда о неисправности в железнодорожном вагоне 101.
Кроме того, в представленном варианте выполнения конструкции блок 107 управления использует указанный сигнал, свидетельствующий о неисправности, для отключения или для перевода в неактивный режим исполнительного механизма 106.3. При определенной жесткости системы подвески, в частности определенной жесткости вспомогательного пружинного блока 104.4, указанных действий может быть достаточно, чтобы при любых обстоятельствах не нарушался кинематический габарит 105.1. Однако если дело обстоит не так, может быть предусмотрено, что при указанном неактивном режиме исполнительного механизма 106.3 непосредственно сам исполнительный механизм 106.3 или любой другой элемент, взаимодействующий с ходовой частью 104 и кузовом 102 вагона, прикладывает возвратное усилие к кузову 102 вагона, которое заставляет кузов 102 вагона вернуться в нейтральное положение (αw=0), как показано на фиг.1.
Как показано на фиг.2, при нейтральном положении железнодорожного вагона 101 на прямом горизонтальном железнодорожном полотне, датчики 109.3 и 109.4 находится на расстоянии D (в продольном направлении) от оси рыскания (расположенной перпендикулярно оси высоты или оси z, соответственно), проходящей между ходовой частью 104 и кузовом 102 вагона. В связи с этим, когда железнодорожный вагон вписывается в криволинейный участок железнодорожного полотна (обозначенный на фиг.2 штрихпунктирной линией 111 с двумя точками), кузов вагона 102 с эталонными элементами 109.5-109.8 совершает движение рыскания (т.е. поворачивается относительно оси рыскания на угол αy рыскания), в результате чего расстояние между датчиками 109.3, 109.4 и эталонными элементами 109.5-109.8 в поперечном направлении (по оси y) заметно изменяется (кузов железнодорожного вагона в положении рыскания показан пунктирной линией 112 на фиг.2).
Таким образом, на прямолинейном участке железнодорожного полотна 111 допускается относительное поперечное смещение ТЕ1 кузова 102 вагона и ходовой части 104 до того момента, при котором блок 107 управления издаст сигнал, свидетельствующий о неисправности (например, в связи с тем, что эталонный элемент 109.8 перекрыл зону обзора 109.10 тесно связанного с ним сенсорного элемента 109.9), а на криволинейном участке железнодорожного полотна 111 допускается значительно меньшее относительное поперечное смещение ТЕ2 кузова 102 вагона и ходовой части 104 до того момента, при котором блок 107 управления издаст сигнал, свидетельствующий о неисправности. В связи с этим имеется преимущество, состоящее в том, что анализ неисправностей, проводимый блоком 107 управления, самопроизвольно простым пассивным способом адаптируется к ситуации движения железнодорожного вагона 101.
Поскольку постоянно проводится мониторинг системы 103 подвески для выявления ситуации, связанной с неисправностью, можно реализовать систему активной регулировки относительного пространственного расположения ходовой части 104 и кузова 102 вагона. Активное регулирование позволяет максимизировать внешний контур и, следовательно, транспортную вместимость кузова 102 вагона, поскольку относительное пространственное расположение кузова 102 вагона и ходовой части 104 может быть активно адаптировано к данному кинематическому габариту 105.1. Кроме того активная система 103 подвески может быть оптимизирована с точки зрения пассажирского комфорта, поскольку жесткость и демпфирующие характеристики могут быть активно адаптированы к текущей ситуации движения железнодорожного вагона 101. Благодаря мониторингу неисправностей согласно изобретению оба из указанных преимуществ достигаются без повышения риска нарушения кинематического габарита 105.1.
Типичные расстояния между сенсорным элементом 109.9 и тесно связанным с ним эталонным элементом 109.6 и их местоположения в системе подвески показаны на фиг.4А при различных радиусах кривизны участков железнодорожного полотна, в которые вписывается железнодорожный вагон (все размеры даны в мм, если не указано иначе). Как показано на 4А, положение железнодорожного вагона зависит от радиуса кривизны участков железнодорожного полотна (-250 м, -500 м и т.д.).
Как показано на фиг.4А, на прямом железнодорожном полотне расстояние между эталонным элементом 109.6 и сенсорным элементом 109.9 составляет 95 мм (80 мм допустимое смещение и 15 мм зона обнаружения или зона обзора, соответственно, сенсорного элемента 109.9). На криволинейном участке железнодорожного полотна с радиусом кривизны R=-250 м сенсорный элемент должен переместиться к эталонному элементу 109.6 на 40 мм, чтобы поперечное смещение кузова вагона ограничивалось до 40 мм (80 мм - 40 мм = 40 мм). Следует отметить, что в других вариантах выполнения конструкции согласно изобретению, несомненно, может быть выбран любой размер зоны обнаружения или зоны обзора (кроме 15 мм), соответственно, сенсорного элемента 109.9.
Поэтому сенсорный элемент 109.9 должен быть расположен на определенном продольном расстоянии D≈1000 мм от оси рыскания, проходящей по центру ходовой части 104, чтобы при указанном смещении угол (αy) рыскания составлял 2,3° (при движении железнодорожного вагона 101 по участку железнодорожного полотна с радиусом R кривизны). Очевидно, что указанное расстояние D зависит от продольного расстояния между указанными двумя ходовыми частями 104, поскольку последние определяют угол αy рыскания при любой кривизне участка железнодорожного полотна.
При положительной кривизне участка железнодорожного полотна сенсорный элемент 109.9 перемещается, удаляясь от эталонного элемента 109.6 (например, до 100 мм для R=+500 м). При меньшей кривизне R=+250 м сенсорный элемент 109.9 перемещается, удаляясь еще больше. Однако это не имеет особого значения, когда ход исполнительного механизма 106.3 в указанном направлении ограничен до определенного предела (здесь, например, в указанном направлении максимальный ход составляет 100 мм). Следует учесть, что в таких случаях может быть достаточно проведения контроля только с одной стороны кузова 102 вагона, т.е. можно исключить эталонные элементы 109.5 и 109.7 и использовать только эталонные элементы 109.6 и 109.8.
В зависимости от конфигурации зоны 109.10 обзора сенсорного элемента 109.1 может возникнуть небольшая погрешность, связанная с углом поворота сенсорного элемента при движении в данный момент железнодорожного вагона по железнодорожному полотну. Чтобы указанная погрешность минимизировалась, сенсорный элемент 109.1 желательно размещать на продольной центральной оси ходовой части 104.
Площадь поверхности эталонных элементов 109.5-109.8, предпочтительно, составляет, по меньшей мере, 45 мм × 45 мм, если используется сенсорный элемент 109.9 индукционного типа. Предпочтительно, площадь поверхности элементов должна быть больше, чтобы допускались продольные и вертикальные перемещения сенсорного элемента 109.9 и соответствующих эталонных элементов 109.5-19.8. Однако следует учитывать, что в других вариантах выполнения конструкции согласно изобретению может использоваться сенсорный элемент любого типа с другим принципом работы, например оптическим, электрическим, механическим, или использующий произвольную комбинацию указанных принципов работы.
Согласно изобретению может быть обеспечена активная система подвески железнодорожного вагона, которая полностью соответствует современным требованиям по обеспечению безопасности. Как показано на фиг.1, два сенсорных элемента 109.9 снабжены соответствующими эталонными элементами 109.5-109.9, что позволяет обеспечить резервные устройства.
На фиг.4В и 4С проиллюстрированы возможные варианты монтажа двух резервных сенсорных элементов 109.9, а именно последовательное расположение (фиг.4В) и параллельное расположение (фиг.4С). По результатам испытаний параллельное расположение, представленное на фиг.4С, является предпочтительным, поскольку может быть распознана неисправность одного из сенсорных элементов 109.9 (чтобы предотвращались скрытые неисправности). В любом случае может быть обеспечено надежное функционирование испытательных средств (например, тестирующей системы, которая регулярно проверяет правильность функционирования соответствующего элемента), чтобы повысить уровень безопасности системы. Таким образом, согласно изобретению, может быть реализована система подвески железнодорожного вагона 103, которая полностью отвечает требованиям по обеспечению безопасности, определенным в стандартах, таких как IEC 61508, IEC 61508, EN 50126 - EN 50129. Точнее, может быть достигнут уровень полноты безопасности (SIL как определено в некоторых из этих стандартов) вплоть до 2 (SIL2) и выше.
Следует учесть, что в других вариантах выполнения конструкции согласно изобретению адаптация вышеупомянутого анализа неисправностей (зависящего от состояния движения) может быть выполнена также активным методом. Таким образом, фактическое состояние движения может характеризоваться, например, ходовой скоростью железнодорожного вагона и/или направлением движения железнодорожного вагона, и/или геометрией железнодорожного полотна, по которому в данный момент движется железнодорожный вагон, и, по меньшей мере, один сенсорный элемент состояния движения (показанный пунктирным контуром 114 на фиг.1), входящий в состав сенсорного устройства, может зафиксировать один или несколько соответствующих параметров состояния движения, которые характеризуют фактическое состояние движения.
В этом случае блок 107 управления выполняет анализ неисправностей в зависимости от фактического значения параметра состояния движения, зафиксированного датчиком 114 состояния движения. Может использоваться любой соответствующий показатель фактического состояния движения железнодорожного вагона. Например, адаптация анализа неисправностей выполняется в зависимости, по меньшей мере, от одного показателя фактической кривизны участка железнодорожного полотна, в который в настоящее время вписывается железнодорожный вагон (в качестве параметра состояния движения). Как указано выше, блок управления может корректировать допустимый предел поперечного смещения (который применяется при анализе неисправностей) в зависимости от кривизны участка железнодорожного полотна, обнаруживаемой в данный момент датчиком 114 состояния движения. Таким образом, достаточно иметь один единственный сенсорный элемент 109.9, фиксирующий с достаточно высокой разрешающей способностью расстояние, на которое он отдален от эталонного элемента 109.6.
Кроме того, или в качестве альтернативы, сенсорное устройство может изменить свои функциональные характеристики (например, форму и/или размер зоны обзора 109.10), в зависимости от фактического значения параметра состояния движения. Изменение характеристик также может выполняться активным способом, т.е. в зависимости от фактического значения параметра состояния движения, фиксируемого и/или воспринимаемого сенсорным элементом.
Кроме того, следует учитывать, что в других вариантах выполнения конструкции согласно изобретению в дополнение, или как альтернатива первой и второй базовым частям 109.5-109.9, первая и вторая базовые части могут быть интегрированы в исполнительный механизм 106.3. Первая и вторая базовые части могут быть любой соответствующей частью исполнительного механизма 106.3, выполняющего определенное относительное перемещение при приложении усилия в системе подвески 103. Например, поршень исполнительного механизма 106.3 может являться первой базовой частью, в то время как цилиндр исполнительного механизма 106.3 может являться второй базовой частью.
Следует учесть, что в этом случае не обязательно непосредственно измерять относительное перемещение первой и второй базовых частей с использованием любого подходящего датчика расстояния. Как указано выше, предпочтительно, чтобы сенсорное устройство 109 фиксировало фактическое значение, по меньшей мере, одного параметра состояния, характеризующего относительное пространственное расположение первой и второй базовых частей. Например, когда используется гидравлический исполнительный механизм 106.3, сенсорное устройство может просто фиксировать (соответствующими средствами) степень заполнения рабочей камеры, определяемой поршнем и цилиндром исполнительного механизма 106.3, что также характеризует относительное расположение поршня и цилиндра.
Наконец, следует отметить, что может быть предусмотрено любое необходимое количество исполнительных механизмов, в которые интегрированы первые и вторые базовые части, чтобы достигалось требуемое дублирование и точность. Например, на каждую ходовую часть может быть предусмотрено два исполнительных механизма 106.3. Предпочтительно, указанные два исполнительных механизма 106.3 могут занимать положение, подобное положению одной из базовых частей 109.5-109.9, как указано выше.
Второй предпочтительный вариант выполнения изобретения
На фиг.5 представлен еще один предпочтительный вариант выполнения конструкции сенсорного устройства 209 согласно настоящему изобретению, который далее будет описан более подробно. Сенсорное устройство 209 может заменить сенсорное устройство 109 в железнодорожном вагоне 101, представленном на фиг.1. Сенсорное устройство 209 по базовой конструкции и функциональности в значительной степени соответствует сенсорному устройству 109, в связи с чем далее будут описываться только их отличительные характеристики. Кроме того, идентичные или подобные элементы обозначены одинаковыми ссылочными позициями, но увеличенными на 100. За исключением отличий, которые даны ниже, особенности и функции указанных элементов ясно описаны ранее.
Отличие сенсорного устройства 209 от сенсорного устройства 109 заключается в том, что адаптация анализа неисправностей к соответствующему состоянию движения обеспечивается в результате изменения геометрии эталонного элемента 209.5 (соединенного с кузовом 102 вагона). Как показано на фиг.5, сенсорный элемент 209.9 (соединенный с ходовой частью 104) и эталонный элемент 209.5 (соединенный с кузовом 102 вагона) размещены таким образом, что при нейтральном положении железнодорожного вагона они располагаются в поперечном направлении, а не в продольном направлении относительно оси рыскания (между ходовой частью 104 и кузовом 102 вагона).
Адаптация поперечного смещения к соответствующему состоянию движения (например, ТЕ1 и ТЕ2) и, таким образом, адаптация анализа неисправностей обеспечивается кривизной воспринимающей поверхности эталонного элемента 209.5. Следует учитывать, что при простом изменении поверхности эталонного элемента 209.5, фактически, может быть достигнута любая требуемая адаптация к фактическому состоянию движения железнодорожного вагона. Необходимо отметить, что для эталонного элемента 209.5 может быть выбрана любая подходящая геометрия. В частности, произвольно могут быть выбраны подходящие комбинации прямых и криволинейных сечений для обеспечения заданной адаптации анализа неисправностей.
Третий предпочтительный вариант выполнения изобретения
На фиг.6 представлен дополнительный предпочтительный вариант выполнения конструкции сенсорного устройства 309 согласно настоящему изобретению, который будет описываться далее более подробно. В железнодорожном вагоне 101, представленном на фиг.1, сенсорное устройство 309 может заменить сенсорное устройство 109. Сенсорное устройство 209 по базовой конструкции и функциональности в значительной степени соответствует сенсорному устройству 109, в связи с чем далее будут описываться только их отличительные характеристики. Кроме того, идентичные или подобные элементы обозначены одинаковыми ссылочными позициями, но увеличенными на 200. За исключением отличий, которые даны ниже, особенности и функции указанных элементов ясно описаны ранее.
Отличие сенсорного устройства 309 от сенсорного устройства 109 заключается в том, что адаптация анализа неисправностей к соответствующему состоянию движения обеспечивается в результате изменения функциональных характеристик, здесь в результате изменения геометрии зоны обзора 309.10 сенсорного элемента 309.9 (соединенного с ходовой частью 104). Как показано на фиг.6, сенсорный элемент 309.9 (соединенный с ходовой частью 104) и эталонный элемент 309.5 (соединенный с кузовом 102 вагона) размещены таким образом, что при нейтральном положении железнодорожного вагона они располагаются в поперечном направлении, а не в продольном направлении относительно оси рыскания (между ходовой частью 104 и кузовом 102 вагона).
Адаптация поперечного смещения к соответствующему состоянию движения (например, ТЕ1 и ТЕ2) и, таким образом, адаптация анализа неисправностей обеспечивается конфигурацией, точнее кривизной зоны обзора 309.10 сенсорного элемента 309.9. Следует учесть, что при простом изменении конфигурации зоны обзора 309.10 (т.е. чувствительности) сенсорного элемента 309.9, фактически, может быть достигнута любая требуемая адаптация к фактическому состоянию движения железнодорожного вагона. Необходимо отметить, что для зоны обзора 309.10, а также для эталонного элемента 309.5 может быть выбрана любая подходящая геометрия. В частности, произвольно могут быть выбраны подходящие комбинации прямых и криволинейных сечений для обеспечения заданной адаптации анализа неисправностей.
Ранее настоящее изобретение было описано в контексте вариантов выполнения конструкции, в которых обеспечен мониторинг данного кинематического габарита и достигается снижение риска крушения. Однако следует учитывать, что в других вариантах конструкции согласно настоящему изобретению мониторинг других параметров или ограничений может быть дополнительной или альтернативной целью, которая должна быть достигнута. Например, подобным образом, можно обеспечить мониторинг ограничений системы выравнивания железнодорожного вагона (корректирующей уровень кузова вагона выше уровня железнодорожного полотна).
Хотя настоящее изобретение ранее описывалось применительно только к железнодорожным транспортным средствам, следует отметить, что также изобретение может быть применено к любому другому типу транспортных средств для преодоления аналогичных проблем, связанных с компактностью системы резервной подвески.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО С УСТРОЙСТВАМИ ДЛЯ ПРОТИВОДЕЙСТВИЯ БОКОВОЙ КАЧКЕ | 2006 |
|
RU2406630C2 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА БАЗЕ РАДИОКАНАЛА | 2014 |
|
RU2556133C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2016 |
|
RU2618660C1 |
| АВТОМАТИЗИРОВАННАЯ ДИАГНОСТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕМЕНТОВ ПОДВЕСКИ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2015 |
|
RU2578620C1 |
| УСТРОЙСТВО С ХОДОВОЙ ЧАСТЬЮ | 2014 |
|
RU2646203C2 |
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2012 |
|
RU2558402C1 |
| СИСТЕМА КОМПЛЕКСНОГО ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ ХОДОВЫХ ЧАСТЕЙ ПОЕЗДОВ | 2010 |
|
RU2428341C1 |
| СПОСОБ МОНИТОРИНГА ПЕРЕМЕЩЕНИЙ БУКСЫ | 2009 |
|
RU2453458C2 |
| АКТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ХОДОВЫМИ ХАРАКТЕРИСТИКАМИ ВЫСОКОСКОРОСТНЫХ ПОЕЗДОВ | 2020 |
|
RU2752435C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 2009 |
|
RU2394714C1 |
Изобретение относится к железнодорожному транспорту, в частности к вагонам подвижного состава. Вагон включает в себя кузов (102), систему подвески (103), которая содержит ходовую часть (104). Согласно изобретению в вагоне предусмотрены сенсорное устройство (109) и блок управления (107). Сенсорное устройство (109) фиксирует фактическое значение, по меньшей мере, одного параметра состояния вагона. Параметр состояния характеризует относительное пространственное расположение первой базовой части (109.9) сенсорного устройства (109), взаимодействующей с одним из участков ходовой части (104), и второй базовой части (109.5-109.8) сенсорного устройства (109), взаимодействующей с кузовом (102) вагона. Блок (107) управления производит анализ неисправностей с использованием фактического значения параметра состояния, при этом согласно анализу неисправностей оценивается выполнение, по меньшей мере, одного заданного критерия неисправности. Блок (107) управления обеспечивает подачу сигнала, свидетельствующего о неисправности, если анализ неисправностей показал, что критерий неисправности выполняется. Достигается повышение безопасности движения вагона. 2 н. и 13 з.п. ф-лы, 8 ил.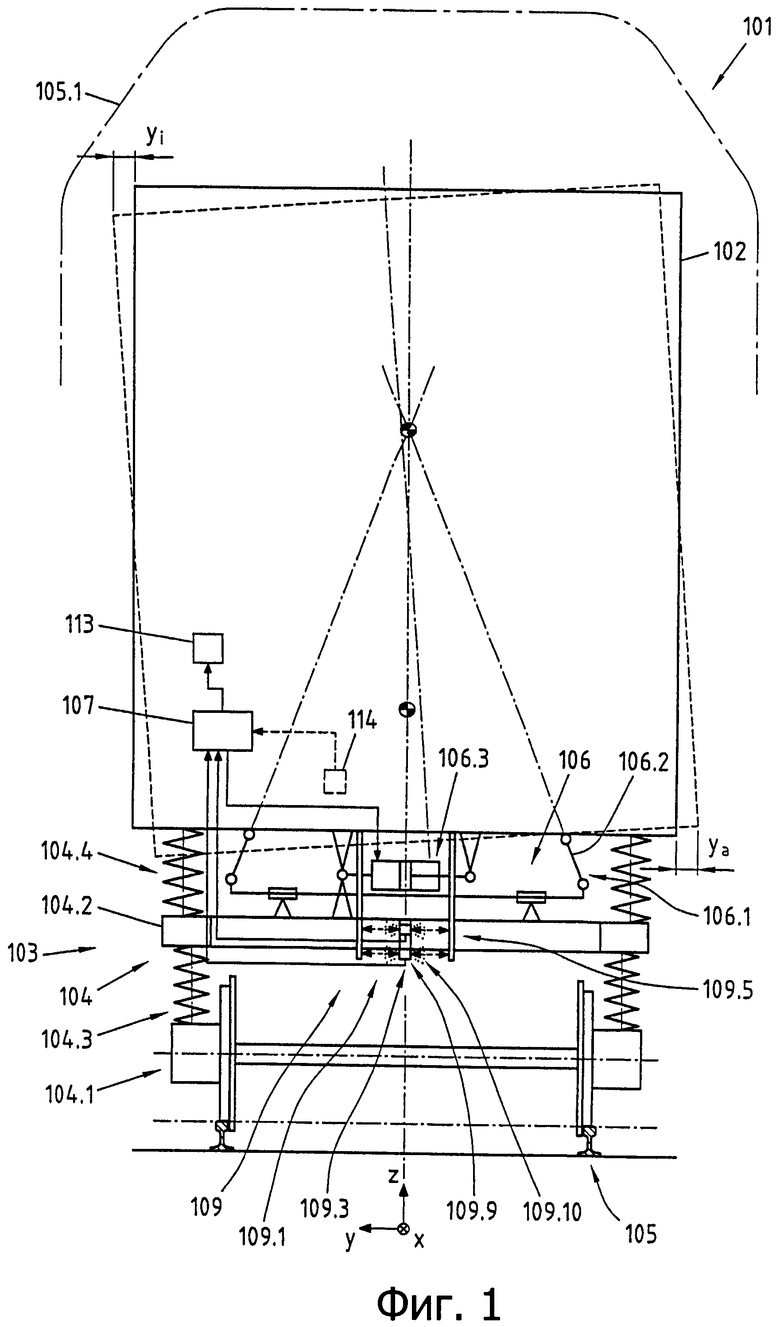
1. Железнодорожный вагон, содержащий
- кузов (102) вагона и
- систему (103) подвески, которая содержит ходовую часть (104), поддерживающую кузов (102) вагона,
отличающийся тем, что
- он содержит сенсорное устройство (109; 209; 309) и блок (107) управления;
- причем сенсорное устройство (109; 209; 309) предназначено для фиксации фактического значения, по меньшей мере, одного параметра состояния, причем параметр состояния характеризует относительное пространственное расположение первой базовой части (109.9; 209.9; 309.9) сенсорного устройства (109; 209; 309), взаимодействующей с одним из участков ходовой части (104), и второй базовой части (109.5-109.8; 209.5; 309.5) сенсорного устройства (109; 209; 309), взаимодействующей с кузовом (102) вагона;
- при этом блок (107) управления предназначен для анализа неисправностей с использованием фактического значения параметра состояния, причем согласно анализу неисправностей оценивается выполнение, по меньшей мере, одного заданного критерия неисправности;
- при этом блок (107) управления выполнен с возможностью подачи сигнала, свидетельствующего о неисправности, если анализ неисправностей показал, что указанный критерий неисправности выполняется.
2. Железнодорожный вагон по п.1, отличающийся тем, что
- он выполнен с возможностью определения продольного направления, поперечного направления и высотного направления;
- причем параметр состояния характеризует относительное поперечное смещение первой базовой части (109.9; 209.9; 309.9) и второй базовой части (109.5-109.8; 209.5; 309.5) в поперечном направлении
и/или
- параметр состояния характеризует угловое смещение рыскания первой базовой части (109.9; 209.9; 309.9) и второй базовой части (109.5-109.8; 209.5; 309.5) относительно высотного направления.
3. Железнодорожный вагон по п.1 или п.2, отличающийся тем, что
- сенсорное устройство (109; 209; 309) и/или блок (107) управления обеспечивает адаптацию анализа неисправностей к фактическому состоянию движения железнодорожного вагона;
- причем фактическое состояние движения, в частности, определяется ходовой скоростью железнодорожного вагона, и/или направлением движения железнодорожного вагона, и/или геометрией железнодорожного полотна, по которому в данный момент движется железнодорожный вагон;
- при этом геометрия железнодорожного полотна, в частности, определяется, по меньшей мере, одним из параметров, в частности кривизной железнодорожного полотна, относительным возвышением рельсов железнодорожного полотна и прогибом железнодорожного полотна.
4. Железнодорожный вагон по п.3, отличающийся тем, что
- сенсорное устройство (109; 209; 309) содержит датчик (114) состояния движения, фиксирующий фактическое значение параметра состояния движения железнодорожного вагона;
- причем параметр состояния движения характеризует фактическое состояние движения железнодорожного вагона;
- блок (107) управления предназначен для анализа неисправностей в зависимости от фактического значения параметра состояния движения, которое зафиксировано датчиком состояния движения
и/или
- сенсорное устройство (109) изменяет свои функциональные характеристики фиксации параметра состояния в зависимости от фактического значения параметра состояния движения.
5. Железнодорожный вагон по п.3, отличающийся тем, что
- сенсорное устройство (109) содержит датчик (109.9) параметра состояния, фиксирующий фактическое значение параметра состояния в направлении считывания;
- причем датчик (109.9) параметра состояния имеет функциональную характеристику в направлении считывания, в частности чувствительность в направлении считывания, которая изменяется в зависимости от фактического состояния движения железнодорожного вагона;
- при этом датчик (109.9) параметра состояния, в частности, по меньшей мере, является секционным, имеющим линейные и/или сферические функциональные характеристики.
6. Железнодорожный вагон по п.5, отличающийся тем, что
- датчик (109.9; 209.9; 309.9) параметра состояния является сенсорным элементом (109.9) и выполнен с возможностью взаимодействия с эталонным элементом (109.5-109.8; 209.5; 309.5);
- сенсорный элемент (109.9; 209.9; 309.9) предназначен для фиксации параметра, характеризующего, по меньшей мере, одно расстояние между сенсорным элементом (109.9; 209.9; 309.9) и эталонным элементом (109.5-109.8; 209.5; 309.5), которое является фактическим значением параметра состояния в направлении считывания;
- причем сенсорный элемент (109.9; 209.9; 309.9) формирует либо первую базовую часть, либо вторую базовую часть, а эталонный элемент формирует другую из указанных частей, в частности вторую базовую часть или первую базовую часть;
- причем сенсорный элемент (109.9; 209.9; 309.9) и эталонный элемент (109.5-109.8; 209.5; 309.5) расположены таким образом, что, по меньшей мере, в направлении считывания относительное расположение сенсорного элемента (109.9; 209.9; 309.9) и эталонного элемента (109.5-109.8; 209.5; 309.5) изменяется в зависимости от фактического состояния движения железнодорожного вагона для изменения функциональной характеристики в направлении считывания;
- при этом сенсорный элемент (109.9; 209.9; 309.9) и эталонный элемент (109.5-109.8; 209.5; 309.5) расположены на заданном расстоянии от оси рыскания, в частности на заданном расстоянии в продольном направлении от оси рыскания, проходящей в системе (103) подвески между ходовой частью (104) и кузовом (102) вагона.
7. Железнодорожный вагон по п.1, отличающийся тем, что
- сенсорное устройство (109; 209; 309) содержит, по меньшей мере, один датчик (109.9; 209.9; 309.9) расстояния;
- причем, по меньшей мере, один датчик (109.9; 209.9; 309.9) расстояния воспринимает, по меньшей мере, одну величину, характеризующую расстояние между первой базовой частью и второй базовой частью;
- при этом, по меньшей мере, один датчик (109.9; 209.9; 309.9) расстояния выполнен, в частности, в виде неконтактного выключателя.
8. Железнодорожный вагон по п.1, отличающийся тем, что
- кузов (102) вагона поддерживается на ходовой части (104) посредством вспомогательного пружинного блока (104.4) системы (103) подвески;
- причем первая базовая часть и вторая базовая часть кинематически параллельны, по меньшей мере, одному из участков вспомогательного пружинного блока (104.4);
- в частности, первая базовая часть соединена с первым участком ходовой части (104), а вторая базовая часть соединена со вторым участком ходовой части (104), в частности с балкой, которая поддерживается на первом участке ходовой части (104) одним из участков вспомогательного пружинного устройства, или вторая базовая часть, соединена с кузовом вагона;
- в частности, первая базовая часть и/или вторая базовая часть интегрированы в элемент вспомогательного пружинного блока (104.4), в частности в пневмопружину вспомогательного пружинного блока.
9. Железнодорожный вагон по п.1, отличающийся тем, что
- система (103) подвески содержит прилагающее усилие устройство (106.3);
- причем прилагающее усилие устройство (106.3), контролируемое блоком (107) управления, предназначено для функционирования в системе (103) подвески и выполнено с возможностью воздействия, по меньшей мере, на один параметр состояния;
- причем прилагающее усилие устройство, в частности, выполнено с возможностью воздействия в зависимости от сигнала, свидетельствующего о неисправности, в частности прилагающее усилие устройство выполнено с возможностью переключения в неактивный режим работы в ответ на сигнал, свидетельствующий о неисправности;
- при этом прилагающее усилие устройство (106.3), в частности, в неактивном режиме работы предназначено для приложения усилия возврата в системе подвески для возврата кузова (102) вагона в заданное нейтральное положение относительно ходовой части (104).
10. Железнодорожный вагон по п.9, отличающийся тем, что
- прилагающее усилие устройство содержит исполнительный механизм (106.3), в частности механизм наклона, предназначенный для корректировки угла наклона кузова (102) вагона относительно оси наклона, проходящей в продольном направлении железнодорожного вагона;
и/или
- прилагающее усилие устройство содержит демпфирующее устройство, в частности устройство, демпфирующее рыскание, предназначенное для демпфирования относительного перемещения ходовой части и кузова вагона
и/или
- первая базовая часть и/или вторая базовая часть интегрированы в компонент прилагающего усилие устройства (106.3), в частности в исполнительный механизм (106.3) прилагающего усилие устройства.
11. Способ обнаружения неисправностей в системе подвески железнодорожного вагона, содержащего кузов вагона (102) и систему (103) подвески, которая содержит ходовую часть (104), поддерживающую кузов (102) вагона, отличающийся тем, что
- фиксируют фактическое значение, по меньшей мере, одного параметра состояния, при этом параметр состояния характеризует относительное пространственное расположение первой базовой части (109.9; 209.9; 309.9), взаимодействующей с ходовой частью (104), и второй базовой части (109.5-109.8; 209.5; 309.5), взаимодействующей с кузовом (102) вагона; и
- выполняют анализ неисправностей с использованием фактического значения параметра состояния, причем согласно анализу неисправностей оценивают выполнение, по меньшей мере, одного заданного критерия неисправности;
- подают сигнал, свидетельствующий о неисправности, если в результате анализа неисправностей выявлено, что критерий неисправности выполняется.
12. Способ по п.11, отличающийся тем, что
- железнодорожный вагон определяет продольное направление, поперечное направление и высотное направление;
- причем параметр состояния характеризует поперечное смещение первой базовой части (109.9; 209.9; 309.9) и второй базовой части (109.5-109.8; 209.5; 309.5) в поперечном направлении
и/или
- параметр состояния характеризует угловое смещение рыскания первой базовой части (109.9; 209.9; 309.9) и второй базовой части (109.5-109.8; 209.5; 309.5) относительно высотного направления.
13. Способ по п.11 или п.12, отличающийся тем, что
- адаптируют анализ неисправностей к фактическому состоянию движения железнодорожного вагона;
- определяют фактическое состояние движения, в частности, с помощью ходовой скорости железнодорожного вагона и/или направлением движения железнодорожного вагона, и/или геометрией железнодорожного полотна, по которому в данный момент движется железнодорожный вагон;
- определяют геометрию железнодорожного полотна, в частности, с помощью, по меньшей мере, одного из показателей, в частности кривизны железнодорожного полотна, относительного возвышения рельсов железнодорожного полотна и прогиба железнодорожного полотна.
14. Способ по п.13, отличающийся тем, что
- фиксируют фактическое значение параметра состояния движения;
- при этом параметр состояния движения характеризует фактическое состояние движения железнодорожного вагона;
- анализируют неисправности в зависимости от фактического значения параметра состояния движения
и/или
- изменяют функциональную характеристику фиксации параметра состояния в зависимости от фактического значения параметра состояния движения.
15. Способ по п.11, отличающийся тем, что
- оснащают систему (103) подвески прилагающим усилие устройством (106.3);
- посредством прилагающего усилие устройства (106.3), функционирующего в системе (103) подвески, воздействуют, по меньшей мере, на один параметр состояния;
- при этом прилагающее усилие устройство (106.3), в частности, изменяет свое действие в зависимости от указанного сигнала, свидетельствующего о неисправности, в частности прилагающее усилие устройство (106.3) переключается в неактивный режим работы в ответ на указанный сигнал, свидетельствующий о неисправности;
- причем прилагающее усилие устройство (106.3) выполняют, в частности, в виде исполнительного механизма, в частности механизма наклона, корректирующего угол наклона кузова (102) вагона относительно оси наклона, проходящей в продольном направлении железнодорожного вагона;
и/или
- прилагающее усилие устройство выполняют, в частности, в виде демпфирующего устройства, в частности устройства, демпфирующего рыскание для демпфирования относительного смещения ходовой части (104) и кузова (102) вагона
и/или
- первую базовую часть и/или вторую базовую часть интегрируют в элемент прилагающего усилие устройства (106.3), в частности в исполнительный механизм (106.3) прилагающего усилие устройства.
| WO 2007022989 A1, 01.03.2007 | |||
| US 2005200089 A1, 15.09.2005 | |||
| DE 19826115 A1,16.12.1999 | |||
| СТЕНД ДЛЯ СБОРКИ ПОД СВАРКУ И СВАРКИ ПОВОРОТНЫХ СТЫКОВ ТРУБ | 1972 |
|
SU422559A1 |
| DE 10047414 A1, 11.04.2002 | |||
| Система подвески многоопорной ходовой части транспортного средства | 1989 |
|
SU1705162A1 |
| JPH 05221315 A, 31.08.1993 | |||

