Изобретение относится к космическому машиностроению и предназначено для использования при создании автономных мобильных роботизированных исследовательских станций-планетоходов для изучения планет с твёрдой поверхностью, главным образом Луны и Марса.
Известны автономные мобильные роботизированные исследовательские станции-планетоходы для космических экспедиций, представляющие собой агрегатированный на вездеходном шасси кузов со встроенным и навесным навигационным и исследовательским оборудованием и солнечные элементы.
Успешность миссии исследовательского планетохода и всей космической экспедиции с длительным перелётом и высадкой на поверхность исследуемой планеты определяется подвижностью планетохода, от которой зависит протяжённость пройденного планетоходом за время активного функционирования маршрута. Протяжённость и сложность маршрутов перемещений планируют, исходя из проходимости, управляемости, маневренности, наблюдаемости управления, энергоэффективности и живучести шасси, определяющих техническую скорость перемещений планетохода. Максимальная скорость перемещения современных планетоходов составляет метры в секунду, а техническая скорость исчисляется в сантиметрах в секунду.
Известны следующие технические решения близкие по технической сущности:
1. А.Л. Кемурджиан, В.В. Громов, И.Ф. Кажукало, ММ. Маленков, В.К. Мишкинюк, В.Н. Петрига, ИМ. Розенцеейг. Планетоходы. Москва. «Машиностроение». 1993.
2. Эл. ресурс: - https://cyberleninka.ru/article/n/analiz-podvizhnosti-marsohodov-dlya-razrabotki-sistem-peredvizheniya-i-algoritmov-upravleniya-planetohodami-novogo-pokoleniya.
3. Освоение вселенной. Планетоходы. Прошлое, настоящее, будущее - Информация скопирована с сайта https://robotics.ua/shows/modernity/3003-the_development_of_the_universe_planetary_rovers_past_present_future; https://ru.qwe.wiki/wiki/Rocker-bogie.
4. ДОБРЕЦОВ Р.Ю., МАТРОСОВ С.И., БОРИСОВ Е.Г., КОМАРОВ И.А., ТЕЛЯТНИКОВ Д.Э. МОБИЛЬНЫЙ КОМПЛЕКС ЛОКАЛЬНОГО МОНИТОРИНГА RCL-LAB.[ //https://www.elibrary.ru/item.asp?id=32854031]
5. В.Н. Наумов, О.Е. Козлов, К.Ю. Машков, К.Е. Бяков. Анализ конструкций упругих колес для перспективных российских луноходов с точки зрения оценки проходимости. Эл. ресурс: - http://izvuzmash.ru/articles/1455/1455.pdf.
6. Мишо, Сент-Фан; Gibbesch, A .; Ther, Томас; Кребс, Амбруаз; Lee, C .; Despont, B .; Schfer, B .; Слэйд, Р. Разработка шасси и подсистемы передвижения ExoMars. Эл. ресурс: - https://doi.org/10.3929/ethz-a-010034575.
7. Маленков Михаил Иванович, Волов Валерий Анатольевич. СРАВНИТЕЛЬНЫЙ АНАЛИЗ КОМПОНЕНТОВ ХОДОВОЙ ЧАСТИ САМОХОДНЫХ ШАССИ ПЛАНЕТОХОДОВ. Эл. ресурс: https://cyberleninka.ru/article/n/sravnitelnyy-analiz-komponentov-hodovoy-chasti-samohodnyh-shassi-planetohodov.
8. Ramón Gonzalez, Dimitrios Apostolopoulos. Improving rover mobility through traction control: simulating rovers on the Moon. Эл. ресурс: - https://www.researchgate.net/publication/331689572_Improving_rover_mobility_through_traction_control_simulating_rovers_on_the_Moon.
9. Ramón Gonzalez, Karl Iagnemma. Slippage estimation and compensation for planetary exploration rovers. State of the art and future challenges. Эл. ресурс: 
10. Raymond Arvidson P. De Grosse Jr John P. Grotzinger E.K. Stilly. Relating geologic units and mobility system kinematics contributing to Curiosity wheel damage at Gale Crater, Mars. Эл. ресурс: - 
11. In-situ Exploration and Sample Return: Autonomous Planetary Mobility. [https://mars.nasa.gov/mer/mission/technology/autonomous-planetary-mobility/].
12. Scott Moreland, Krzysztof Skonieczny, David Wettergreen, Vivake Asnani, Colin Creager, Heather Oravec. Inching Locomotion for Planetary Rover Mobility. https://ri.cmu.edu/pub_files/2011/3/inching_ieeeAERO2011.pdf.
13. Michaud, Stéphane, Gibbesch, A. Thüer, Thomas, Krebs, Ambroise, Lee C., Despont B., Schäfer B., Slade R. Development of the ExoMars Chassis and Locomotion Subsystem.
[https://www.researchgate.net/publication/224999438_Development_of_the_ExoMars_Chassis_and_Locomotion_Subsystem].
14. В.Н. Наумов, О.Е. Козлов, К.Ю. Машков, К.Е. Бяков. Анализ конструкций упругих колес для перспективных российских луноходов с точки зрения оценки проходимости. // ИЗВЕСТИЯ ВЫСШИХ УЧЕБНЫХ ЗАВЕДЕНИЙ. МАШИНОСТРОЕНИЕ №8 [689] 2017. С. – 54-66.
15. М.И. Маленков, В.А. Волов, Н.К. Гусева, Е.А. Лазарев. АНАЛИЗ ПОДВИЖНОСТИ МАРСОХОДОВ ДЛЯ РАЗРАБОТКИ СИСТЕМ ПЕРЕДВИЖЕНИЯ И АЛГОРИТМОВ УПРАВЛЕНИЯ ПЛАНЕТОХОДАМИ НОВОГО ПОКОЛЕНИЯ// Известия ЮФУ. Технические науки Izvestiya SFedU. Engineering Sciences. С. – 82-95.1.
16. Robert Bauer, Winnie Leung, Tim Barfoot. DEVELOPMENT OF A DYNAMIC SIMULATION TOOL FOR THE EXOMARS ROVER. // 8 th ESA Workshop on Advanced Space Technologies for Robotics and Automation, ASTRA 2004, ESTEC, Noordwijk, The Netherlands, 2-4 November, 2004, pp. 251-258.
17. М.И. Маленков, В.А. Волов. СРАВНИТЕЛЬНЫЙ АНАЛИЗ КОМПОНЕНТОВ ХОДОВОЙ ЧАСТИ САМОХОДНЫХ ШАССИ ПЛАНЕТОХОДОВ. // Известия ЮФУ. Технические науки Izvestiya SFedU. Engineering Sciences. С. – 169-185.
18. Беккер М.Г. Введение в теорию систем местность-машина. Машиностроение. 1973г. 520с.
19. Wang Qionga, Yu Dengyunc, Jia Yangb. Research progress and future development on mission planning technologies of planetary rover. Эл. ресурс: - https://www.sciencedirect.com/science/article/pii/S1877705814038120.
19. Richard Volpe. Rover Functional Autonomy Development for the Mars Mobile Science Laborator. Эл. ресурс: - https://www-robotics.jpl.nasa.gov/publications/Richard_Volpe/aerospace03.pdf
20. NASA’s Next Mars Rover to Test Tech Useful for Human Missions. Эл. ресурс: - https://www.nasa.gov/directorates/spacetech/NASAs_Next_Mars_Rover_to_Test_Tech_Useful_for_Human_Missions.
21. Extended Length Marsupial Rover Sensing Tether. LUNA INNOVATIONS INCORPORATED. Эл. ресурс: - https://www.sbir.gov/sbirsearch/detail/1426353.
Для достижения необходимого современной космонавтике повышения результативности исследований планет необходимо увеличение максимальной скорости перемещений планетоходов до десятков метров в секунду и технической скорости до метров в секунду. Достижение таких скоростей перемещений по сложнопересечённой местности с практически неизвестными свойствами грунта следует обеспечить при чрезвычайно жёстких ограничениях на массогабаритные характеристики шасси и энерговооружённости планетохода. К этим условиям добавляются технические сложности, обусловленные космической радиацией, низкой гравитацией, отсутствием атмосферы, высокой абразивностью и когезивностью лунного реголита, или ветрами и пылевыми бурями на Марсе. Ещё один набор проблем создаёт значительная разница между ночными и дневными температурами поверхности планетохода и грунта.
В настоящее время наиболее распространены шестиколёсные шасси с колёсной схемой 6×6×4 с балансирной подвеской типа Rocker-Bogie. На таких шасси агрегатированы серия марсоходов NASA «Соджорнер», «Спирит», «Оппортьюнити», «Кьюриосити», «Персевирэнс», китайский луноход «Юйту» и перспективный европейский планетоход «Розалинд Франклин». Эта колёсная схема с балансирной подвеской обеспечивает наиболее высокую проходимость в классе машин с многоколёсными шасси. Но балансирная подвеска колёс способна лишь частично компенсировать недостатки многоколёсного шасси.
Во-первых, преимущества шасси с балансирной подвеской колёс проявляются при равномерной загрузке всех колёс. Это условие выполняется при движении по местности с высокой несущей способностью грунта с неровностями, радиус кривизны огибающей которых превышает радиус кривизны продольной проходимости. При движении по уклонам равномерная загрузка колёс возможно только в подвесках с активной адаптацией – способностью смещения центра масс планетохода к колёсам с пониженной нагрузкой. Шасси современных планетоходов не имеют этой способности. Вследствие этого, в результате сложения статического перераспределения вертикальной нагрузки и действия реактивного момента на приводах колёс, нагрузка на колёса распределяется неравномерно и существенно ограничивает продольную проходимость планетоходов. У многоколёсных шасси с пассивными балансирными подвесками реактивный момент от колёс перераспределяет нагрузку на задние колёса. В результате, при движении на подъём по рыхлому слабосвязному грунту, эти особенности проявляются в буксовании перенагруженных задних колёс и зарывании их в рыхлый грунт, и в буксовании недозагруженных передних колёс с тем же эффектом. В условиях на поверхности Марса более предпочтительными по проходимости являются каменистые участки. При наезде колеса марсохода типа Кьюриосити на камень с высотой, превышающей амплитуду качания коромысла, возникает провисание отдельных колёс и превращение шестиколёсного шасси в четырёхколёсное с соответствующей потерей тягового усилия и управляемости.
Во-вторых, поскольку сила сопротивления Fc движению колеса радиуса R с нагрузкой P при наезде на препятствие высотой h меняется как

в условиях движения по трассе с препятствиями, соразмерными радиусу колёс, энергоэффективность многоколёсного шасси остаётся низкой и при балансирной подвеске на длинных коромыслах вследствие того, что часть колёс неизбежно будет двигаться в режиме кинематического несоответствия.
В-третьих, у планетоходов на шасси Rocker-Bogie кузов жёстко связан с осью качания коромысел подвески посредством зубчатого зацепления в дифференциальном механизме, объединяющем кузов аппарата с бортовыми полуосями качания коромысел с движителями, или дополнительным балансирным рычагом, связывающим кузов с коромыслами подвески. Дифференциальный механизм и дополнительный балансир обеспечивают кузову вдвое меньшие углы отклонения кузова в продольной плоскости от горизонтали, чем углы отклонения коромысел. При движении по сложному рельефу с быстрыми отклонениями коромысел реактивные моменты на узлах дифференциального механизма и в узлах крепления балансирного рычага становятся значительными, что создаёт дополнительное ограничение на скорость перемещения планетохода по неровностям.
В-четвёртых, ещё одним существенным недостатком многоколёсного шасси с балансирной подвеской колёс является несоответствие требованию компактности конструкции планетохода. Шасси марсоходов «Спирит», «Оппортьюнити», «Кьюриосити», «Персевирэнс» из-за больших габаритов его коромысел пришлось дополнить четырьмя приведёнными шарнирами, позволяющими складывать их и разворачивать передние колёса. Общая масса этих устройств, не участвующих в приведение планетохода в движение, достигает 7% его массы. Это без учёта моторредукторов на четырёх рулевых колёсах, обеспечивающих управление углом поворота передних и задних колёс. При манёврах передние и задние колёса планетоходов выходят за пределы габаритов планетохода, уменьшая его продольную динамическую проходимость.
Для предотвращения экскавационного зарывания колёс в рыхлые грунты или опасных концентраций нагрузки на узлы подвески шасси из-за сложного рельефа местности, необходимо выполнение большого объёма работ по выбору маршрута прохождения очередного отрезка пути. Это существенно снижает техническую скорость передвижения планетоходов. Для повышения эффективности предварительного анализа условий перемещения последнюю версию марсохода – «Персеверанс» - оснастили летающим дроном, способным к кратковременным полётам для разведки местности и предоставлении искусственному интеллекту блока управления планетохода информации о характере местности на маршруте движения. Прибегать к таким мерам вынуждает, также, опасность столкновения колёс с острыми краями обломков валунов во время движения планетохода. Из-за таких столкновений не только возрастает сопротивление движению планетохода, но и повреждаются сами колёса. Особенно такие эффекты проявляются при движении вниз по склону, когда динамические моменты на задних колёсах вдавливают передние колёса в грунт. Для продления жизни повреждённых передних колёс на марсоходе Curiosity пришлось перейти на движение задним ходом и загрузить в его систему управления мотор-колёсами специальную программу, «которая постоянно анализирует то, как каждое из шести колес Curiosity давит на грунт, и управляет движением каждого из них в режиме реального времени. Благодаря ей марсоход может двигаться с такой скоростью, при которой колеса не будут проскальзывать и вдавливать друг друга в гальку и другие потенциально опасные предметы, а также буксовать или проворачиваться на месте». В реальности эти меры являются паллиативными, не приводят к полному исключению проскальзываний или экскавационных зарываний колёс в грунт.
В-пятых, вследствие того, что система местность-машина с шестиколёсным шасси обладает 30-ю избыточными связями, при движении и маневрировании машины в системе возникают состояния кинетического несоответствия, приводящие к снижению управляемости и наблюдаемости управления перемещением машины.
Известные попытки преодоления этих недостатков схемы Rocker-Bogie созданием колёсно-шагающих шасси различных кинематических схем бесперспективны, поскольку избыточность этих конструкций ещё больше, а масса дополнительных – балластных - узлов и механизмов составляет десятки процентов от массы конструкции, что исключает их применение для создания мобильных автономных исследовательских станций для космических экспедиций.
Таким образом, шасси современных автономных роботизированных планетоходов не обладают достаточной проходимостью, управляемостью, маневренностью, наблюдаемостью управления, достаточной технической скоростью и живучестью шасси для обеспечения необходимой для повышения эффективности космических экспедиций подвижности.
Задачей изобретения является достижение технического результата в виде повышения подвижности исследовательских планетоходов.
Указанный технический результат достигается тем, что исследовательский планетоход агрегатируют на статически уравновешенном двухколейном двухколёсном шасси с динамическим управлением остойчивостью (далее – одноосное шасси).
Одноосное шасси повышает подвижность различных средств передвижения (патенты РФ №№ 2090429, 2102272, 2405122, 2421202) вследствие ряда технических особенностей.
Во-первых, у статически уравновешенного одноосного шасси диаметр колёс кратно превышает диаметр колёс многоколёсного шасси. Кратно больший диаметр колёсного движителя автоматически обеспечивает кратное повышение энергоэффективности преодоления единичного препятствия из-за указанной в (1) зависимости. Согласно этой зависимости, при двукратном увеличении радиуса колеса от величины порядка 1,1 высоты препятствия, сила сопротивления движению колеса снижается более чем в пять раз и продолжает снижение при дальнейшем увеличении радиуса колеса, создавая эффект «сглаживания» пути. Соответственно, энергоэффективность одноосного шасси при преодолении препятствий существенно превышает энергоэффективность многоколёсного шасси.
Во-вторых, снижаются ограничивающие скорость движения вибрационные нагрузки на кузов из-за снижения количества наездов движителей на препятствия и уменьшения вертикальных ускорений при однократном наезде на препятствия в соответствии с соотношением величин вертикальных ускорений для колёс разного радиуса, пропорциональным отношению

где k – отношение величин радиусов колёс, а ή – отношение величины высоты препятствия к величине радиуса меньшего колеса.
В соответствии с этим отношением, при двукратном увеличении радиуса колеса величина вертикального ускорения снижается в 1,43 раза и, соответственно, кратно снижаются вибрационные нагрузки на кузове планетохода.
Для демпфирования передающихся на кузов планетохода толчков от рамы одноосного шасси, колёса одноосного планетохода устанавливают на раме шасси на подпружиненном подвесе. Для этого на вертикальные стойки обратной П-образной рамы надевают каретки, к которым прикрепляют колёса, каретки связывают со стойками рамы пружинами, а между собой тросово-блочной системой, выполняющей роль стабилизатора поперечной устойчивости планетохода. Также, каретки могут быть установлены на вертикальных стойках рамы свободно и соединены между собой тросово-блочной системой с пружинной вставкой. Каретки могут быть кинематически развязаны со стойками рамы посредством ползунов или линейных подшипников.
В-третьих, одноосное статически уравновешенное шасси обладает значительно меньшим количеством избыточных связей в системе местность-машина. В частности, в системе местность-машина с планетоходом на одноосном шасси с дополнительной степенью свободы в виде управляемого смещения кузова относительно шасси действуют 7 избыточных связей. Соответственно, по сравнению с многоколёсным планетоходом, планетоход на одноосном шасси перемещается практически в режиме полного кинематического соответствия, а управляемость и наблюдаемость управления такого планетохода существенно выше, чем у планетохода любой другой конструкции.
В-четвёртых, в отличие от многоколёсных планетоходов, у планетохода на одноосном шасси отсутствует ограничение проходимости из-за продольного клиренса. Также, практически отсутствует ограничение проходимости из-за упора выступающих за габариты движителя элементов кузова в препятствие.
В-пятых, кратное снижение экскавационного погружения движителей в грунт вследствие большей опорной проходимости колеса большего радиуса, обеспечивает преодоление участков, непреодолимых для планетоходов типа «Кьюриосити»/«Персеверанс» из-за зарывания нагруженных колёс в рыхлый грунт. Соответственно, снижаются время выбора маршрута и длина маршрута.
В целом, с учётом перечисленных факторов, планетоход на одноосном шасси с массогабаритами планетоходов «Кьюриосити»/«Персеверанс» сможет пройти маршрут «Кьюриосити» с кратно большей технической скоростью вследствие увеличения коэффициентов геометрической, динамической геометрической и опорной проходимостей и увеличения максимальной скорости движения из-за эффекта «сглаживания пути», а также повышения энергоэффективности, маневренности, управляемости и наблюдаемости управления вследствие движения в режиме кинематического соответствия.
Для повышения энерговооружённости планетохода на одноосном шасси устанавливают солнечные элементы – фотоэлектрические преобразователи большой площади, имеющие вид соединённых между собой шарнирами складывающихся дисковых панелей, закреплённых на шарнирных кронштейнах, установленных в кинематически развязанных с колёсами приведённых или неприведённых от отдельных двигателей контейнерах для панелей солнечных элементов в дисках колёсах. Во время движения планетоходы панели сложены в контейнеры в колёсных дисках. В режиме зарядки аккумуляторных батарей планетоход устанавливают так, чтобы развёрнутые панели солнечных элементов были направлены в сторону Солнца, а приводы в креплениях шарнирных кронштейнов или в креплениях контейнеров по сигналам датчиков положения солнца придают панелям оптимальный угол наклона. В другом варианте в качестве приводов регулировки наклона панелей могут быть использованы присоединённые к панелям или к шарнирным кронштейнам термо– и/или фотоактивные тяги/толкатели, меняющие свои геометрические параметры при попадании на них солнечного света и меняющие угол наклона панелей.
Для повышения живучести марсоходов в ночное время и в зимний период на корпусе кузова устанавливают ветросиловую установку в виде плоского ротора с вертикальной осью, предназначенную для подзарядки аккумуляторных батарей планетохода при отсутствии солнечного света или невозможности раскрытия панелей солнечных элементов при сильном ветре.
Для снижения ударных нагрузок на конструкцию планетохода и увеличения сцепления колёс с грунтом ободы колёс планетохода снабжают дугообразными демпферами-грунтозацепами из легированной стали, демпфирующими за счёт упругой деформации ударные нагрузки на колёса и повышающими тяговые характеристики колёс при движении по слабосвязным грунтам. Демпферы-грунтозацепы имеют вид полуэллипсоидных дугообразных полос, закреплённых концами на краях обода колеса под углом к плоскости продольного сечения колеса и под углом друг к другу. Ширину демпферов, угол наклона к плоскости колеса и величину эллиптичности дуги демпфера-грунтозацепа определяют в соответствии с гравитационными условиями на поверхности исследуемой планеты с учётом характера местности и грунта в районе проведения исследований. Также, в соответствии с ожидаемыми условиями перемещения по местности, определяют необходимый для обеспечения эффективности и долгоживучести демпферов-грунтозацепов профиль продольного сечения стальной полосы демпфера-грунтозацепа, точки крепления концов демпфера-грунтозацепа к ободу – в районе расположения ближних фокальных параметров, или в районе расположения концов большой оси эллипса, или в районе расположения дальних фокальных параметров и характер крепления демпфера-грунтозацепа к ободу – жёсткое или шарнирное.
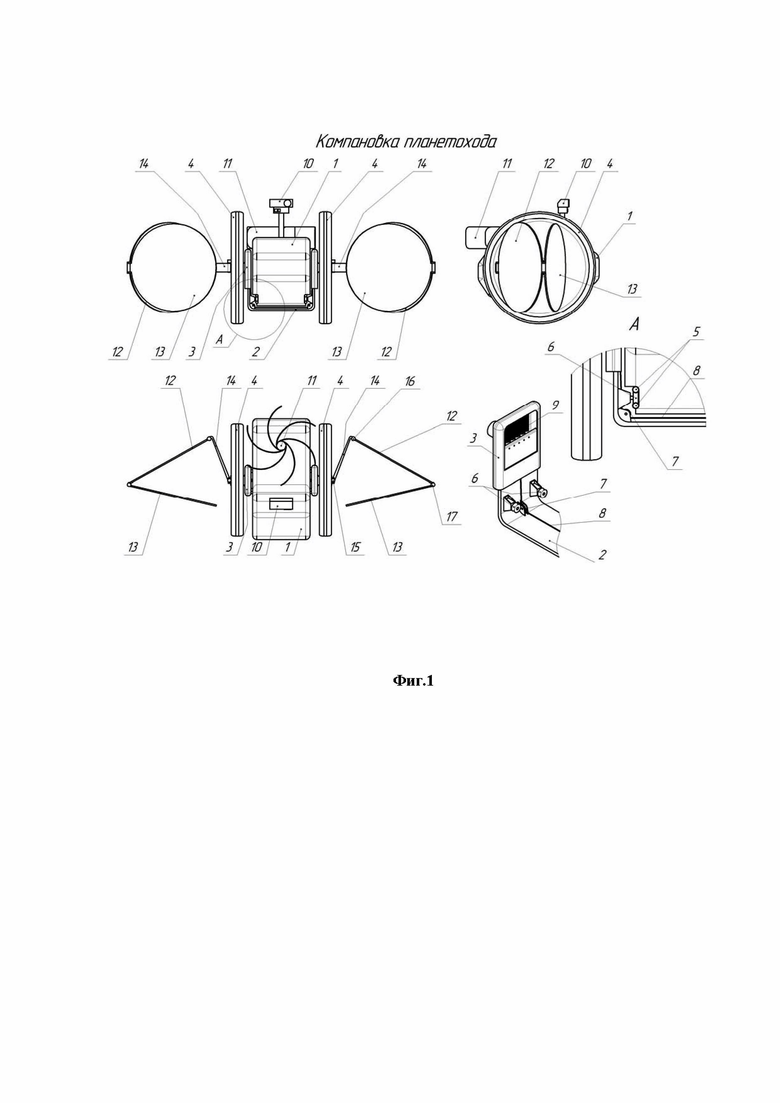
Общие виды компоновочного решения конструкции планетохода на одноосном шасси приведены на Фиг. 1, 2, 3 и 4.
На Фиг 1 представлены схематические изображения вида спереди планетохода с полуразвёрнутыми дисковыми панелями солнечных батарей, вида сбоку и вида сверху, а также отдельно представлены вырезка «А» примерного вида возможной конструкции узла крепления троса поперечной остойчивости к раме планетохода и узла крепления опорного ролика для опорной направляющей кузова. На фигурах обозначены: 1 – кузов планетохода; 2 - обратная П-образная рама несущей конструкции планетохода; 3 - каретка мягкой подвески колёс планетохода; 4 – колёса планетохода; 5 – опорный ролик рамы; 6 – кронштейны крепления опорных роликов рамы; 7 – блок троса поперечной остойчивости планетохода; 8 – трос поперечной остойчивости; 9 – пружины мягкой подвески; 10 – блок видеосистем; 11 – крыльчатка ветрогенератора; 12 – корневая панель солнечной батареи; 13 – вторичная панель солнечной батареи; 14 – кронштейн; 15 – шарнир кронштейна; 16 – комлевый шарнир солнечной батареи; 17 – межпанельный шарнир солнечной батареи.
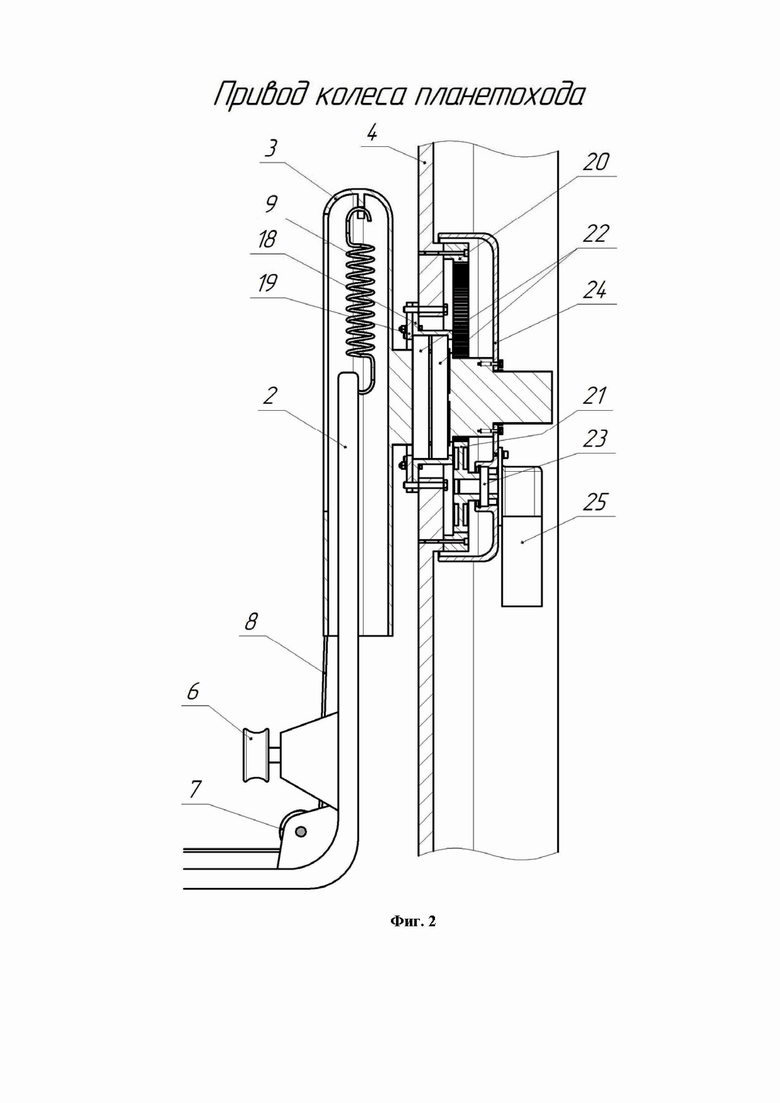
На Фиг. 2 обозначены дополнительно примерные возможные виды конструкции подвески колеса к раме и привода колеса: 18 – корзина крепления ступицы к корпусу каретки мягкой подвески; 19 – крепёжная планка; 20 - винт крепления колёсного редуктора к колёсному диску; 21 – венец приводящего колеса редуктора; 22 – корпуса подшипников крепления ступицы на каретке мягкой подвески; 23 – фланец крепления моторредуктора привода колеса к корпусу колёсного редуктора; 24 – крышка колёсного редуктора; 25 – э/двигатель моторредуктора.
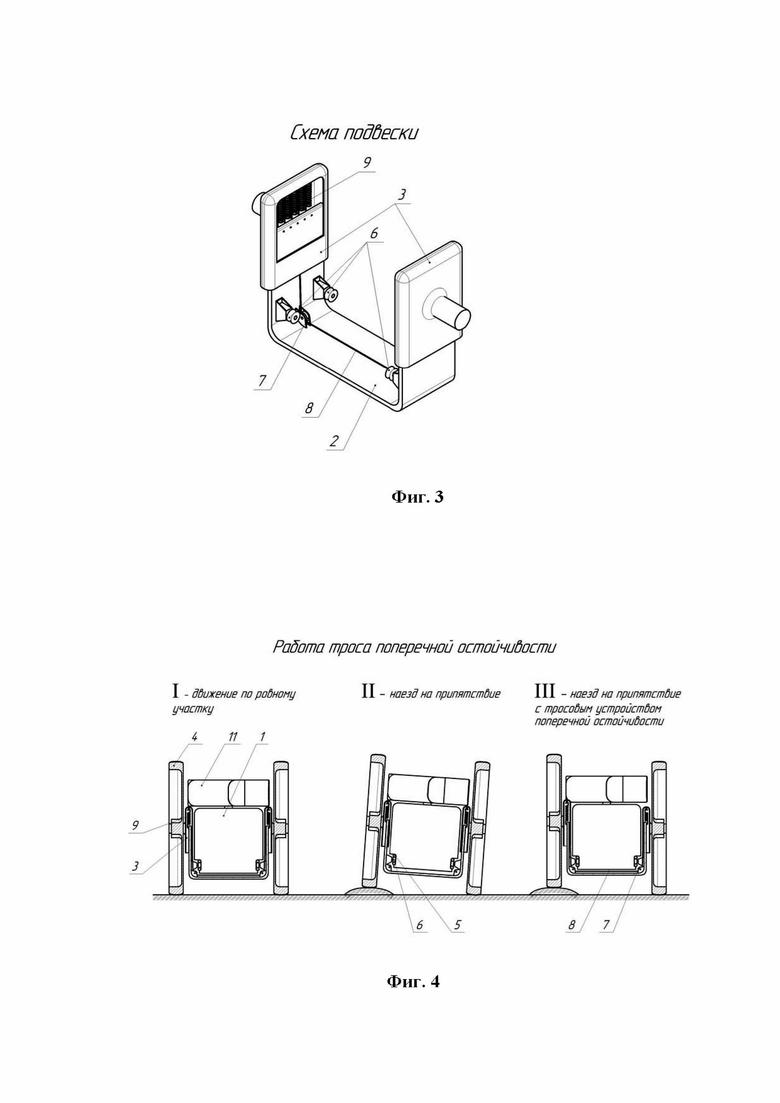
На Фиг. 3 дополнительных обозначений нет.
На Фиг. 4 дополнительных обозначений нет. Представлены схематические изображения I – вид спереди на планетоход при движении по ровной плоской горизонтальной поверхности; II – вид спереди на планетоход при наезде на одностороннее препятствие без троса поперечной остойчивости. III – вид планетохода с тросом поперечной остойчивости при наезде на одностороннее препятствие.
Указанные отличия конструкции планетохода обеспечивают технический результат в виде повышения подвижности и могут обеспечить повышение эффективности космических экспедиций на планеты с твёрдой поверхностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Высокомобильный транспортный робот для перемещения палетированных грузов | 2022 |
|
RU2798652C1 |
| Робот-доставщик на одноосном шасси | 2021 |
|
RU2810208C2 |
| Робототехнический комплекс для безлюдного возведения строений/укрытий на Луне | 2020 |
|
RU2751836C1 |
| Робототехнический комплекс для обеспечения общественной безопасности | 2020 |
|
RU2757747C1 |
| БАЛАНСИРНАЯ ПОДВЕСКА ЧЕТЫРЁХКОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2666080C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| Рычажное устройство | 2022 |
|
RU2798334C1 |
| УСТРОЙСТВО ДЛЯ ДОБЫЧИ ВОДЫ НА ЛУНЕ | 2021 |
|
RU2770385C1 |
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1997 |
|
RU2178752C2 |
Изобретение относится к космическому машиностроению и предназначено для повышения подвижности исследовательских планетоходов. Планетоход агрегатируют на статически уравновешенном двухколейном двухколёсном шасси с динамическим управлением остойчивостью. Колёса одноосного планетохода устанавливают на раме шасси на подпружиненном подвесе в виде подвешенных на пружинах на вертикальных стойках рамы кареток. Планетоход снабжают складными дискообразными солнечными батареями большой площади. На корпусе кузова устанавливают ветросиловую установку в виде плоского ротора с вертикальной осью. Ободы колёс снабжают дугообразными демпферами-грунтозацепами из легированной стали. Достигается повышение подвижности и эффективности космических экспедиций на планеты с твёрдой поверхностью. 4 ил.
Высокоподвижный исследовательский планетоход для космических экспедиций, представляющий собой агрегатированный на вездеходном шасси кузов со встроенным и навесным навигационным и исследовательским оборудованием и солнечными батареями в виде плоских панелей с закреплёнными на них фотоэлектрическими преобразователями, отличающийся тем, что исследовательский планетоход агрегатирован на статически уравновешенном двухколейном двухколёсном шасси с динамическим управлением остойчивостью (далее – одноосное шасси) в виде управляемого перемещения кузова относительно колёс под действием привода, придающего кузову ускорение относительного перемещения в соответствии с величиной и направлением результирующего момента на ведущих колёсах планетохода, а ведущие колёса планетохода установлены на раме шасси на подпружиненном подвесе, посредством перемещающихся по вертикальным стойкам рамы и соединённых с ними пружинами кареток, соединённых между собой тросово-блочной системой поперечной остойчивости планетохода, а солнечные батареи планетохода представляют собой скреплённые приведёнными шарнирами связки панелей с фотоэлектрическими преобразователями, установленные в расположенных в полости колёсных ободов кинематически развязанных с ними контейнерах с возможностью раскрытия и изменения наклона плоскостей панелей, а на кузове планетохода установлен ветрогенератор в виде плоского ротора с вертикальной осью, а на ободах колёс закреплены демпферы-грунтозацепы в виде полуэллипсоидных дугообразных полос, закреплённых концами на краях обода колеса под углом к плоскости продольного сечения колеса и под углом друг к другу.
| "Разработка и создание системы управления остойчивостью модели одноосного планетохода" | |||
| Архивировано на archive.org, 09.08.2016, [https://web.archive.org/web/20160809072921/https://wroboto.ru/netcat_files/3092/2195/TST_020.pdf] | |||
| ОДНООСНЫЙ ВЕЗДЕХОД | 1995 |
|
RU2102272C1 |
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1997 |
|
RU2178752C2 |
| ОДНОКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2216474C2 |
| US 7056185 B1, 06.06.2006 | |||
| US 8496077 | |||

