Способ заряда аккумуляторных батарей беспилотных летательных аппаратов
Область техники, к которой относится изобретение
Изобретение относится к области систем управления и автоматизации и предназначено для обеспечения автоматического (без участия человека) заряда аккумуляторных батарей беспилотных летательных аппаратов, обладающих возможностью вертикального взлета и посадки.
Уровень техники
Современные беспилотные летательные аппараты (БПЛА) работают, в основном, от электрических аккумуляторов. Недостаток таких летательных аппаратов - небольшое время полета. Для выполнения длительных задач необходима посадка аппарата и подзарядка аккумуляторов, которая может выполняться, в том числе, с помощью бесконтактных устройств.
Известны системы, в которых наведение БПЛА на зарядный терминал выполняется автоматически с помощью специальных подсистем навигации и наведения. Например, известен способ заряда, реализуемый с помощью бесконтактного устройства (Патент на изобретение US 7318564, опубл. 15.01.2008), которое обеспечивает зарядку аккумулятора БПЛА от линии электропередач переменного тока посредством кольцевого магнитопровода с обмоткой, имеющего возможность сжиматься и разжиматься. Этот элемент совмещает в себе функции подвеса БПЛА на линии и электрического трансформатора. БПЛА при этом должен быть снабжен подсистемами поиска линии электропередач, точного позиционирования при приближении к линии и захвата. Система довольна сложна и дорога в реализации и не обладает большой надежностью. Кроме того, особенностью всех бесконтактных систем зарядки является относительно низкий КПД передачи энергии.
Контактные системы значительно проще и имеют высокий КПД передачи электроэнергии. Но для нормального контактирования электродов бортовой и наземной частей здесь также требуется довольно точное наведение и стыковка аппарата с зарядным терминалом.
Например, известен способ подзарядки аккумулятора мобильного объекта (заявка на изобретение US 5892350, опубл. 06.04.1999), система которого состоит из бортовых электродов, подсоединенных к соответствующим полюсам бортового аккумулятора, подсистемы позиционирования и наведения, стационарного терминала, включающего в себя пару подпружиненных контактов и электромагнит. Неточность стыковки бортовых электродов с соответствующими электродами стационарного терминала корректируется с помощью подпружинивания электродов и электромагнита, подтягивающего соответствующие электроды друг к другу и обеспечивающего качество контактирования.
Недостатком такого устройства является необходимость точной стыковки соответствующих контактов мобильного устройства и зарядного терминала ("плюс" должен попасть на "плюс", а "минус" на "минус").
Существуют технические решения, которые снижают требования к точности наведения мобильного объекта на зарядный терминал. Это может быть реализовано, например, путем введения избыточных электродов.
Известен способ и система подзарядки мобильного робота (патент на изобретение US 7227334, опубл. 05.06.2007), состоящая из бортовых электродов, подсоединенных к соответствующим полюсам бортового аккумулятора, бортового навигационного устройства и зарядной станции, включающей навигационный маяк, источник питания и матрицу дежурных электродов. Матрица дежурных электродов представляет собой два горизонтальных ряда контактов, один из которых соответствует "плюсу", а другой - "минусу" питания. С помощью бортового навигационного устройства мобильный робот с конечной точностью наводится на матрицу дежурных электродов. Электроды матрицы подпружинены. Они контактируют с соответствующими бортовыми электродами. Так как электродов, соответствующих каждому полюсу, много, то некоторая неточность стыковки (недоезд, небольшой поворот на несколько градусов, небольшой горизонтальный перекос робота) не приводит к ухудшению или потере контакта.
Однако, описанная выше система имеет ограниченные возможности подключения дежурных электродов зарядной станции к бортовым электродам мобильного объекта при неточном наведении последнего. Это особенно существенно, если таким мобильным объектом является БПЛА, точность приземления которого в силу разных причин может быть невысокой, а установка на борту сложного и дорогого оборудования для точного приземления не всегда технически и экономически оправдана.
Наиболее близким по технической сущности и достигаемому результату является способ и система подзарядки аккумулятора электрического беспилотного летательного аппарата (патент РФ на изобретение №2523420, опубл. 20.05.2014). Система включает в себя зарядную станцию, на которой расположена матрица плоских дежурных электродов, электрически связанных с соответствующими анализаторами-коммутаторами, источник питания, плюсовой и минусовой выводы которого соединены с соответствующими выводами анализаторов-коммутаторов, а также навигационный маяк. На борту БПЛА находятся: навигационное устройство, аккумулятор, положительный и отрицательный выводы которого электрически соединены с бортовыми электродами и соответственно. БПЛА с помощью бортового навигационного устройства приземляется на зарядную станцию. При этом используется сигнал навигационного маяка, по сигналам которого БПЛА наводится на зарядную станцию. В результате приземления на нее бортовые электроды, связанные с выводами бортового аккумулятора, касаются отдельных дежурных электродов. Каждый из бортовых электродов контактирует с несколькими дежурными электродами зарядной станции. К тем дежурным электродам, которых коснулись бортовые электроды БПЛА, будет приложено остаточное напряжение бортового аккумулятора. Каждый из анализаторов-коммутаторов, связанный с дежурным электродом, с которым произошло касание, автоматически определяет полярность приложенного остаточного напряжения аккумулятора и коммутирует дежурный электрод с соответствующим выводом источника питания.
Недостатком известного способа и системы является необходимость дополнительного навигационного маяка, которая утяжеляет вес навигационной аппаратуры БПЛА, для которого каждый грамм имеет критическое значение. При использовании штатных средств навигации, таких как GPS/Глонасс точность автоматической посадки БПЛА обеспечивается, как правило, в радиусе 5 метров от центра зарядной установки, что для матрицы плоских электродов будет означать большое их количество и как следствие - сложность системы.
Раскрытие изобретения
Задача изобретения - создание способа заряда аккумуляторных батарей беспилотного летательного аппарата, обеспечивающего надежное контактирование электродов зарядной установки и зарядного устройства БПЛА в условиях неточной посадки.
Технический результат - увеличение надежности контактирования, повышение вероятности правильного подключения при заряде аккумуляторных батарей БПЛА, за счет снижения необходимости точного позиционирования на зарядной установке.
Указанный технический результат достигается тем, что способ заряда аккумуляторных батарей беспилотных летательных аппаратов включает приземление летательного аппарата с помощью бортового навигационного устройства на зарядную установку, при приземлении на нее происходит электрический контакт электродов летательного аппарата и электродов зарядной установки, в результате чего происходит заряд аккумуляторных батарей беспилотного летательного аппарата, согласно изобретению. Способ осуществляется с помощью зарядной установки, которая содержит контроллер заряда, обеспечивающий подачу электроэнергии на два электрода, один из которых выполнен в виде металлической решетки (сетки), а другой - в виде металлического листа (возможно выполнение нижнего электрода в виде мелкоячеистой сетки, либо перфорация листа для стока дождевой воды), при этом металлическая решетка располагается выше металлического листа; зарядное устройство летательного аппарата также имеет два электрода, один из которых располагается на опорах летательного аппарата и свободно проходит через решетку верхнего электрода зарядной установки, а другой - располагается на корпусе летательного аппарата так, чтобы при его посадке на зарядную установку происходил электрический контакт электродов зарядной установки и электродов летательного аппарата.
Краткое описание чертежей
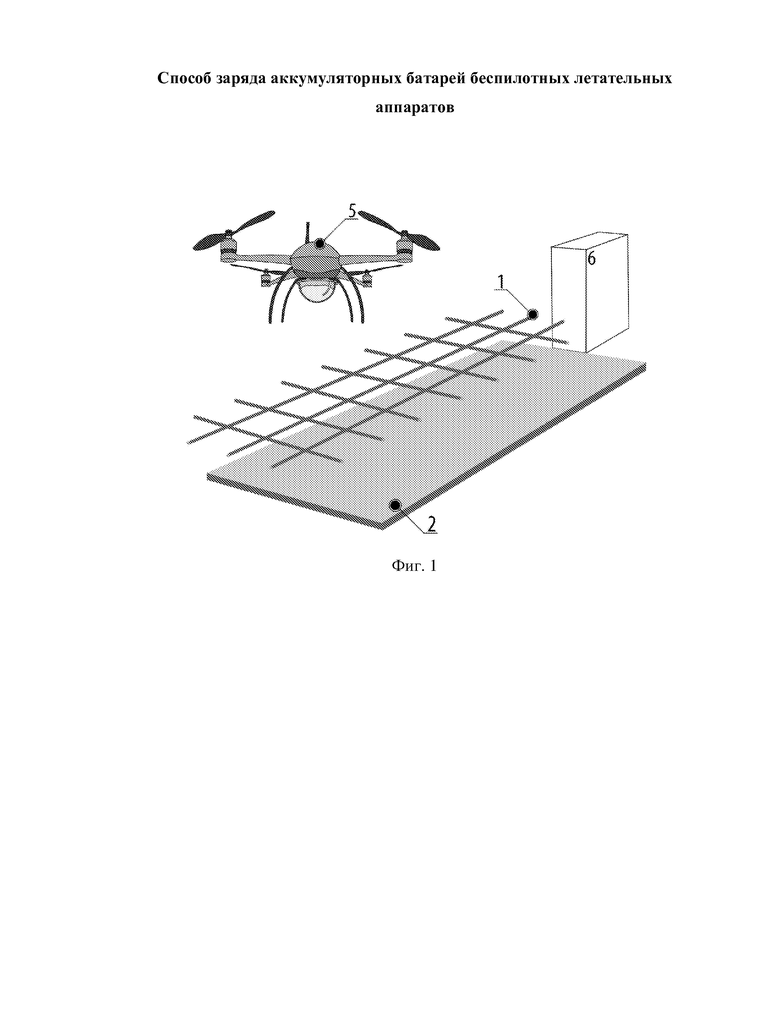
На фиг. 1 изображен общий вид зарядной установки аккумуляторных батарей БПЛА.
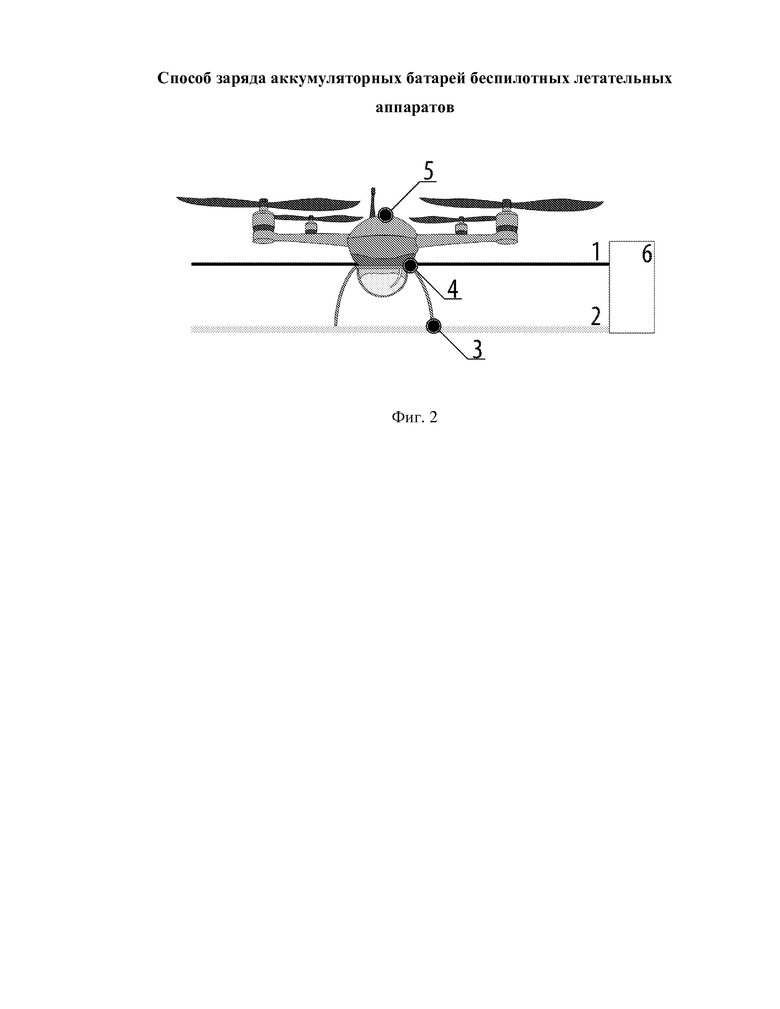
На фиг. 2 показана схема выполнения заряда аккумуляторных батарей БПЛА.
На фигурах приняты следующие обозначения: электроды 1 и 2 зарядной установки, электроды 3 и 4 беспилотного летательного аппарата 5, контроллер заряда 6.
Осуществление изобретения
Предлагаемый способ заряда аккумуляторных батарей реализуется с помощью зарядной установки, которая содержит два электрода (1 и 2) и контроллер заряда 6, обеспечивающий подачу электроэнергии на электроды 1 и 2, причем электрод 1 выполнен в виде металлической решетки, а электрод 2 - в виде металлического листа. Зарядное устройство летательного аппарата также имеет два электрода (3 и 4), причем электрод 3 располагается на опорах летательного аппарата и свободно проходит через ячейки электрода 1 зарядной установки, а электрод 4 располагается на корпусе летательного аппарата так, чтобы при его посадке на зарядную установку происходил электрический контакт электродов 2 и 3, а также электродов 4 и 1.
Заряд аккумуляторных батарей БПЛА осуществляется следующим образом.
БПЛА 5 с помощью бортового навигационного устройства приземляется на зарядную установку. В результате посадки на нее происходит электрический контакт электродов 2 и 3 зарядной установки, а также электродов 4 и 1 БПЛА. Происходит заряд аккумуляторных батарей БПЛА.
Особенностью предлагаемого решения является применение электродов 1 и 2, конструкция которых позволяет производить контакт с летательным аппаратом при его автоматической посадке в зоне зарядной установки. Благодаря применению металлической сетки не требуется точного позиционирования летательного аппарата относительно зарядной установки. Современные летательные аппараты, имеющие систему позиционирования по GPS могут достичь точности автоматической посадки в зону радиусом порядка 5 метров. При размерах зарядной установки соответствующей радиусу зоны автоматической посадки обеспечивается гарантированный электрический контакт летательного аппарата и зарядной установки при выполнении автоматической посадки.
Также, способ включает в себя контроллеры заряда, источники электроснабжения, аккумуляторы и другие вспомогательные элементы, которые являются стандартными элементами и не отображены на фигурах.
Таким образом, за счет снижения необходимости точного позиционирования на зарядной установке происходит увеличение надежности контактирования.
Сопоставительный анализ заявляемого изобретения показал, что совокупность существенных признаков заявленного способа заряда аккумуляторных батарей не известна из уровня техники и значит, соответствует условию патентоспособности «Новизна».
В уровне техники не было выявлено признаков, совпадающих с отличительными признаками заявленного изобретения и влияющих на достижение заявленного технического результата, поэтому заявленное изобретение соответствует условию патентоспособности «Изобретательский уровень».
Приведенные сведения подтверждают возможность применения заявленного способа для обеспечения автоматического (без участия человека) заряда аккумуляторных батарей беспилотных летательных аппаратов, и поэтому соответствует условию патентоспособности «Промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОДЗАРЯДКИ АККУМУЛЯТОРА ЭЛЕКТРИЧЕСКОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2523420C1 |
| Система подзарядки аккумулятора беспилотного летательного аппарата | 2017 |
|
RU2657866C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2024 |
|
RU2837679C1 |
| БЕЗЭКИПАЖНЫЙ КАТЕР, ОСНАЩЕННЫЙ УСТРОЙСТВОМ ДЛЯ ПОДЗАРЯДКИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ВЕРТОЛЕТНОГО ТИПА | 2023 |
|
RU2831111C1 |
| Устройство для зарядки БПЛА от провода воздушной линии электропередачи | 2023 |
|
RU2811167C1 |
| Способ подзарядки аккумуляторов в беспроводной сенсорной сети | 2020 |
|
RU2730468C1 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЭЛЕКТРОСЕТЕВОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2674550C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
Изобретение относится к области систем управления и автоматизации. Технический результат - увеличение надежности контактирования, повышение вероятности правильного подключения при заряде аккумуляторных батарей беспилотного летательного аппарата. Способ заряда аккумуляторных батарей беспилотных летательных аппаратов включает приземление летательного аппарата с помощью бортового навигационного устройства на зарядную установку, при приземлении на нее происходит электрический контакт электродов летательного аппарата и электродов зарядной установки, в результате происходит заряд аккумуляторных батарей беспилотного летательного аппарата, причем способ осуществляется с помощью зарядной установки, которая содержит контроллер заряда, обеспечивающий подачу электроэнергии на два электрода, один из которых выполнен в виде металлической решетки, а другой - в виде металлического листа; зарядное устройство летательного аппарата также имеет два электрода, один из которых располагается на опорах летательного аппарата и свободно проходит через ячейки электрода зарядной установки, а другой располагается на корпусе летательного аппарата так, чтобы при его посадке на зарядную установку происходил электрический контакт электродов зарядной установки и электродов летательного аппарата. 2 ил.
Способ заряда аккумуляторных батарей беспилотных летательных аппаратов, включающий приземление летательного аппарата с помощью бортового навигационного устройства на зарядную установку, при приземлении на нее происходит электрический контакт электродов летательного аппарата и электродов зарядной установки, в результате происходит заряд аккумуляторных батарей беспилотного летательного аппарата, отличающийся тем, что способ осуществляется с помощью зарядной установки, которая содержит контроллер заряда, обеспечивающий подачу электроэнергии на два электрода, один из которых выполнен в виде металлической решетки, а другой - в виде металлического листа; зарядное устройство летательного аппарата также имеет два электрода, один из которых располагается на опорах летательного аппарата и свободно проходит через ячейки электрода зарядной установки, а другой располагается на корпусе летательного аппарата так, чтобы при его посадке на зарядную установку происходил электрический контакт электродов зарядной установки и электродов летательного аппарата.
| СИСТЕМА ПОДЗАРЯДКИ АККУМУЛЯТОРА ЭЛЕКТРИЧЕСКОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2523420C1 |
| АККУМУЛЯТОРНАЯ БАТАРЕЯ | 2005 |
|
RU2313159C2 |
| RU 135469 U1, 10.12.2013 | |||
| US 2005083011 A1, 21.04.2005 | |||
| US 5892350 A, 06.04.1999. | |||

