Изобретение относится к области летательных аппаратов, в частности к винтокрылым летательным аппаратам вертикального взлета и посадки - вертолетам.
Известны вертолеты классической одновинтовой схемы с хвостовым рулевым винтом. К таким вертолетам относятся и вертолеты фирмы Миля серии МИ (МИ-8, МИ-26 и др.) [1] (прототип). Трехшарнирный несущий винт такого вертолета закреплен на валу, приводящем его во вращение, и управляется автоматом перекоса. Реактивный момент от вращения несущего винта парирует хвостовой рулевой винт, который участвует также и в разворотах вертолета путем изменения шага.
Недостатком устройства таких вертолетов является то, что втулка несущего винта крепится непосредственно на вал, приводящий винт во вращение, а управление осуществляется автоматом перекоса. При этом каждая лопасть соединяется с втулкой через три шарнира: вертикальный, горизонтальный и осевой, еще два шарнира расположены в звене управления, между автоматом перекоса и рычагом лопасти. Все шарниры постоянно работают в течение каждого оборота несущего винта и испытывают колоссальные нагрузки. Все это вызывает повышенный износ подшипников вала и вибрацию в корпусе вертолета, снижает надежность несущей системы из-за большого количества постоянно работающих шарниров. Необходима кропотливая настройка амплитуды колебания лопастей относительно плоскости вращения, что ограничивает режимы вращения несущего винта, повышает вероятность аварийности. Усложнена конструкция и техническое обслуживание вертолетов, высока их стоимость.
Задачей изобретения является повышение надежности и безопасности полетов путем упрощения конструкции вертолета. Снятие нагрузки от веса вертолета с вала, приводящего несущий винт во вращение, снижение вибрации и сил трения.
Поставленная задача достигается тем, что у вертолета, содержащего фюзеляж с кабиной экипажа и двигателями, несущий винт с механизмом изменения шага винта и устройство уравновешивания реактивного крутящего момента от вращения несущего винта, втулка несущего винта установлена через подшипники на наклоняемой полой оси, которая стержнями связана шарнирно с корпусом вертолета и связана с механизмом управления вертолетом. При этом вал, приводящий несущий винт во вращение, расположен внутри наклоняемой полой оси и имеет два карданных шарнира равных угловых скоростей, кинематические центры которых располагаются вблизи плоскостей шарнирного соединения стержней с наклоняемой полой осью и с корпусом вертолета.
Наклоняемая полая ось может иметь рычаг в горизонтальной плоскости, ограничивающий вращение оси и шарнирно связанный тягой с корпусом вертолета, а механизм изменения шага несущего винта может иметь автономный привод.
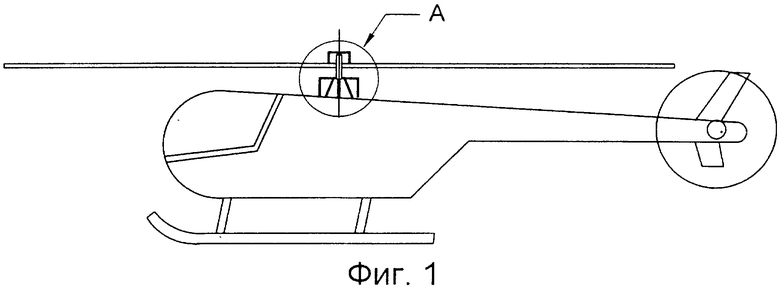
На фиг.1 изображен вертолет одновинтовой схемы; на фиг.2 - узел «А» с фиг.1 с расположением втулки несущего винта через подшипники на наклоняемой полой оси, установленной через стержни шарнирно на корпусе вертолета и автономным гидравлическим приводом механизма изменения шага несущего винта.
Вертолет содержит следующие элементы и механизмы. На корпусе вертолета 1 установлены шарнирно стержни 2, на которых через шарниры 3 установлена наклоняемая полая ось 4 с основанием оси 5 и рычагами 6. Внутри наклоняемой полой оси расположен вал 7 с карданными шарнирами равных угловых скоростей 8 и водило 9 на верхнем конце вала. На наклоняемой полой оси установлены: через подшипники - втулка несущего винта 10, винтовой ползун 11 механизма изменения шага 12 несущего винта, управляемого гидроцилиндрами 13, трубки и шланги 14 гидроцилиндров, тяги управления 15, рычаг 16, ограничивающий вращение оси.
НП - направление полета.
При виде сверху по часовой стрелке вращаются: ведущий вал 7 с карданными шарнирами равных угловых скоростей 8, водило 9, несущий винт и наружная обойма механизма изменения шага винта 12.
Управление вертолетом осуществляется следующим образом. При отклонении ручки управления, например от себя, тяга 15 переместится вниз по стрелке и, воздействуя через рычаг 6, закрепленный на основании 5 наклоняемой полой оси 4, наклонит ось вперед. Плоскость вращения несущего винта изменит свое положение в пространстве (наклонится вперед с одновременным смещением назад) изменит свое направление и вектор тяги несущего винта относительно центра тяжести вертолета. При отклонении ручки влево или вправо тяга поперечного управления (аналогичная тяге 15, но смещенная на 90 градусов и поэтому не показанная на фиг.) отклонит в соответствующем направлении наклоняемую полую ось 4 и изменит направление вектора тяги несущего винта.
Управление механизмом изменения шага 12 несущего винта осуществляется автономно, в данном случае гидроцилиндрами 13 гидравлической системы, которые перемещают внутреннюю обойму механизма изменения шага 12 по винтовым поверхностям 11 на наклоняемой полой оси 4. При этом развороты вертолета осуществляются как обычно - путем изменения тяги хвостового рулевого винта или заменяющего его приспособления, а вертикальные перемещения - путем изменения общего шага несущего винта.
Таким образом, использование вертолета с несущим винтом на наклоняемой полой оси, установленной через стержни шарнирно на корпусе вертолета, имеющего вал с карданными шарнирами равных угловых скоростей в плоскостях шарнирного соединения стержней с наклоняемой полой осью и с корпусом вертолета, повышает надежность несущей системы и безопасность полетов. Снижает силы трения, а также стоимость производства и эксплуатации за счет упрощения конструкции. Кроме того, такой вертолет имеет возможность автоматически стабилизироваться в режиме висения при отсутствии воздействия на ручку управления.
Источники информации
1. A.M. Володко. Основы летной эксплуатации вертолетов:
Аэродинамика. - М.: Транспорт, 1984 г., стр. 72-89 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛОНКА ВЕРТОЛЕТА | 1999 |
|
RU2156208C1 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2281885C1 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| МЕХАНИЗМ АВТОМАТА ПЕРЕКОСА ВЕРТОЛЕТА | 2011 |
|
RU2485017C2 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| ВТУЛКА ВОЗДУШНОГО ВИНТА С АВТОМАТОМ ПЕРЕКОСА | 2018 |
|
RU2746024C2 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728945C1 |
| НЕСУЩИЙ ВИНТ | 2006 |
|
RU2338665C2 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2709081C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2019 |
|
RU2726560C1 |
Изобретение относится к области авиации, в частности к конструкциям несущих винтов. Вертолет содержит фюзеляж с кабиной экипажа и двигателями, несущий винт с механизмом изменения шага и устройство уравновешивания реактивного крутящего момента от вращения несущего винта. Втулка несущего винта установлена через подшипники на наклоняемой полой оси. Ось при помощи не менее трех стержней шарнирно связана с корпусом вертолета и связана с механизмом управления вертолетом. Вал, приводящий несущий винт во вращение, расположен внутри наклоняемой полой оси и имеет два карданных шарнира равных угловых скоростей, кинематические центры которых располагаются вблизи плоскостей шарнирного соединения тяг с наклоняемой полой осью и с корпусом вертолета. Наклоняемая полая ось может иметь рычаг в горизонтальной плоскости, ограничивающий вращение оси и шарнирно связанный тягой с корпусом вертолета, а механизм изменения шага несущего винта имеет автономный привод. Повышается надежность несущей системы и безопасность полетов, снижается стоимость производства и эксплуатации. 1 з.п. ф-лы, 2 ил.
1. Вертолет, содержащий фюзеляж с кабиной экипажа и двигателями, несущий винт с механизмом изменения шага и устройство уравновешивания реактивного крутящего момента от вращения несущего винта, отличающийся тем, что втулка несущего винта установлена через подшипники на наклоняемой полой оси, которая при помощи не менее трех стержней шарнирно связана с корпусом вертолета и связана с механизмом управления вертолетом, а вал, приводящий несущий винт во вращение, располагается внутри наклоняемой полой оси и имеет два карданных шарнира равных угловых скоростей, кинематические центры, которых находятся вблизи плоскостей шарнирного соединения стержней с наклоняемой полой осью и с корпусом вертолета.
2. Вертолет, по п. 1, отличающийся тем, что наклоняемая полая ось имеет рычаг в горизонтальной плоскости, ограничивающий вращение оси и шарнирно связанный тягой с корпусом вертолета, а механизм изменения шага несущего винта имеет автономный привод.
| US 7137591 B2, 21.11.2006 | |||
| КОЛОНКА ВЕРТОЛЕТА | 1999 |
|
RU2156208C1 |
| Способ получения деформирующих усилий | 1950 |
|
SU129485A1 |
| НАРОДНЫЙ ВЕРТОЛЕТ 21 ВЕКА КАН 21 (ВАРИАНТЫ) | 2007 |
|
RU2364550C2 |

