Изобретение относится к ультразвуковому устройству измерения расхода и к способу определения скорости потока текучей среды, текущей в трубопроводе, в соответствии с ограничительной частью п.п. 1 и 13 формулы изобретения.
Надежным способом измерения скорости потока или расхода является способ на основе разности времен прохождения. При этом на внешнем периметре трубопровода устанавливается пара ультразвуковых преобразователей с взаимным смещением в продольном направлении, которые поочередно испускают и регистрируют ультразвуковые сигналы поперек потока вдоль измерительного луча, определенного между ультразвуковыми преобразователями. Ультразвуковые сигналы, проходящие через текучую среду, замедляются или ускоряются потоком в зависимости от направления прохождения. Результирующая разность времени прохождения вычисляется с учетом геометрических размеров для получения средней скорости потока текучей среды. С учетом площади поперечного сечения из нее следует объемный расход или расход. Для более точных измерений также может быть использовано множество измерительных лучей, каждый с парой ультразвуковых преобразователей, чтобы более точно определять поперечное сечение потока.
Ультразвуковые преобразователи, применяемые для генерации ультразвука, содержат колебательный элемент, обычно керамический элемент. С его помощью электрический сигнал преобразуется в ультразвук и наоборот, например, на основе пьезоэлектрического эффекта. В зависимости от применения ультразвуковой преобразователь действует в качестве звукового генератора, звукового детектора или обоих устройств. При этом должна быть обеспечена связь между текучей средой и ультразвуковым преобразователем. Распространенное решение заключается в том, чтобы ввести ультразвуковой преобразователь вовнутрь трубопровода в прямом контакте с текучей средой. Однако такие интрузивные датчики могут затруднять точные измерения вследствие возмущения потока. И наоборот, погружные ультразвуковые преобразователи подвергаются воздействию текучей среды, ее давления и температуры, вследствие чего они могут быть повреждены или потерять свою работоспособность из-за отложений.
По существу также известны способы, в которых внутренняя стенка остается полностью закрытой. Одним из примеров является так называемая накладная установка, например, раскрытая в документе US 4467659, с помощью которой ультразвуковые преобразователи закрепляются на трубопроводе снаружи. Однако при этом может быть обеспечено наличие только диаметральных измерительных лучей через ось трубы, в результате чего в случае не аксиально-симметричных профилей потока возникают дополнительные погрешности.
В документе ЕР 1378272 В1 предлагается размещать генерирующие ультразвук элементы на внешней стороне стенки. В отличие от способа с накладыванием ультразвуковой преобразователь встраивают непосредственно в стенку. В области ультразвуковых преобразователей выполняют карман с существенно меньшей толщиной стенки, чем остальная стенка, при этом остающаяся толщина стенки образует мембрану ультразвукового преобразователя. Эта установка, которая также называется врезной, в некоторой степени представляет собой промежуточную форму между жесткой установкой во внутреннем пространстве трубопровода и накладной установкой.
Помимо звука в текучей среде ультразвуковые преобразователи также постоянно генерируют корпусный или конструкционный шум, передаваемый через стенку трубопровода. Конструкционный шум является помехой, поскольку текучая среда и ее поток не оказывают на него влияние, таким образом, он не содержит требуемой информации измерения и накладывается с сигналом измерения во времени. В случае интрузивных датчиков конструкционный шум может быть сведен к минимуму конструктивными демпфирующими конструкциями, отделяющими акустически ультразвуковой преобразователь от трубопровода. Это невозможно выполнить при накладной или врезной установке, при которой ультразвуковые сигналы передаются через стенку трубопровода или даже преднамеренно возбуждают часть стенки трубопровода. Конструкционный шум также не может быть отделен от звука в текучей среде с помощью классических алгоритмических способов фильтрации, поскольку частоты конструкционного шума и шума в текучей среде совпадают.
Документ DE 202013105800 U1 раскрывает ультразвуковое измерительное устройство с ультразвуковыми преобразователями при врезной установке. Для подавления распространения конструкционного шума в стенке трубопровода используются области демпфирования с рассеивающими центрами, например, в виде сварных швов. Однако влияние помех от конструкционного шума в лучшем случае может быть немного уменьшено, при этом проблема в принципе сохраняется.
Таким образом, задачей изобретения является улучшение точности измерения ультразвукового расходомера.
Эта задача решена с помощью ультразвукового устройства измерения расхода и способа определения скорости потока текучей среды, текущей в трубопроводе, в соответствии с п.п. 1 и 13 формулы изобретения. Ультразвуковое устройство измерения расхода по существу представляет собой многолучевой счетчик и, соответственно, выполняет измерения с помощью способа на основе разности времен прохождения на множестве измерительных лучей, каждый из которых определяется двумя ультразвуковыми преобразователями. Ультразвуковые преобразователи одного измерительного луча расположены на противоположных стенках трубопровода с диаметральным или радиальным смещением, так что измерительные лучи проходят через текучую среду. Кроме того, ультразвуковые преобразователи смещены друг от друга на осевое расстояние, т.е. в продольном направлении трубопровода, так что ход измерительного луча имеет компоненту по потоку и против него. Скорость потока вычисляется из разностей времени прохождения вдоль множества измерительных лучей.
Основная идея изобретения заключается в том, чтобы не размещать множество лучей в одной и той же плоскости поперечного сечения, как это обычно выполняют в случае многолучевого счетчика, а задать им различное осевое смещение. Обычный многолучевой счетчик пытается более точно измерить неравномерный поток путем многократного сканирования одного и того же поперечного сечения в множестве местоположений. Задача изобретения заключается в создании измерительных лучей, в которых изменяется отношение путей распространения для звука в текучей среде и конструкционного звука, причем при максимально одинаковых характеристиках потока для этих измерительных лучей. Это создает предпосылки для компенсации эффектов конструкционного шума при оценке. Это изменение достигается за счет осевого расстояния.
Преимущество изобретения заключается в том, что становится возможным выполнение гораздо более точных измерений. Благодаря специальному расположению ультразвуковых преобразователей и измерительных лучей, в частности с соответствующей обработкой сигнала, как описано ниже, требуемый сигнал измерения обнаруживается существенно лучше, при этом компенсируется влияние конструкционного шума на измерение разности времени прохождения и, таким образом, значительно уменьшается систематическая погрешность измерения расхода.
Измерительные лучи предпочтительно расположены в общей плоскости, параллельной трубопроводу. Такая плоскость также может быть названа продольной плоскостью. В виде в поперечном разрезе измерительные лучи, таким образом, наложены друг на друга, при этом они имеют один и тот же вневписанный угол, описывающий угловое смещение диаметрального хода. Следует еще раз отметить, что измерительные лучи расположены иначе, чем в обычном многолучевом счетчике. Измерительные лучи в общей продольной плоскости сканируют практически одну и ту же область потока, но с разными осевыми расстояниями. Могут быть использованы дополнительные группы измерительных лучей в соответствующих других продольных плоскостях с различными осевыми расстояниями внутри группы. В этом случае это может соответствовать сканированию профиля потока, как в обычном многолучевом счетчике, причем обычные измерительные лучи заменены группой измерительных лучей согласно изобретению внутри одной и той же продольной плоскости. В этом описании почти везде упоминается только одна группа измерительных лучей, образующая вместе по существу один единственный измерительный луч обычного многолучевого счетчика, при этом всегда предусмотрено наличие множества групп.
Предпочтительно, измерительные лучи расположены непосредственно друг за другом. Целью этого расположения измерительных лучей согласно изобретению является по возможности изменение только осевого расстояния. Другие условия, в первую очередь характеристики потока, в идеальном случае должны оставаться идентичными для этих измерительных лучей. Если измерительные лучи располагаются как можно более плотно друг за другом, т.е. параллельно оси трубопровода в продольном направлении, то это достигается по меньшей мере приблизительно, поскольку поток практически не изменяется на коротком пути потока между ними.
Предпочтительно, измерительные лучи вместе имеют пилообразную форму. Такая пилообразная или зигзагообразная форма является в частности предпочтительной конфигурацией, позволяющей контролировать очень похожие или практически идентичные участки потока в компактной многолучевой конфигурации. Зубцы пилы не являются совершенно одинакового размера, поскольку осевое расстояние должно изменяться.
Ультразвуковые преобразователи на вершинах пилообразной формы предпочтительно задействованы в обоих соседних измерительных лучах. Это, конечно, не может относиться к двум ультразвуковым преобразователям на крае, т.е. в начале и конце пилообразной формы. Однако средние ультразвуковые преобразователи могут определять измерительные лучи в двух направлениях при достаточно большом угле излучения, так что в целом требуется меньше ультразвуковых преобразователей, а именно, в частности, только n+1 ультразвуковых преобразователей для n измерительных лучей. В любом случае ультразвуковые преобразователи предпочтительно запускаются с задержкой по времени, поскольку в противном случае измерения будут мешать друг другу, так что двойное использование ультразвукового преобразователя на двух измерительных лучах не означает никаких дополнительных ограничений.
Вычислительный блок предпочтительно выполнен для оценки по меньшей мере одной характеристической величины функции, описывающей зависимость времени прохождения или разности времени прохождения от осевого расстояния ультразвуковых преобразователей, из множества измерений на множестве измерительных лучей, и для вычисления скорости потока из этой характеристической величины. При создании изобретения было обнаружено, что погрешность, вызванная наложенным конструкционным шумом в измеренной разности времени прохождения, изменяется с осевым расстоянием ультразвуковых преобразователей, определяющих соответствующий измерительный луч. Разность времени прохождения не увеличивается монотонно с осевым расстоянием, но образуются колебания. Подход оценки согласно изобретению заключается в рассмотрении функции разности времени прохождения в зависимости от осевого расстояния и в коррекции колебаний. Эта функция определяется посредством множества измерительных лучей на множестве опорных точек, а именно на множестве осевых расстояний. Отсюда можно оценить функцию и компенсировать погрешность. Для этого не обязательно восстанавливать всю функцию, но сначала только по меньшей мере одну ее характеристическую величину, такую как наклон наилучшей эмпирической прямой. Результатом является улучшенный результат измерения, корректированный в частности, по меньшей мере, в значительной степени в отношении систематического влияния помех от конструкционных шумов. Лежащая в основе оценка производится на уровне измеренных значений и поэтому является математически очень простой по сравнению со способами на уровне сигналов, при этом она также является чрезвычайно ресурсосберегающей, поскольку даже обычное измерение времен прохождения предъявляет более высокие требования к аппаратной части устройства. Альтернативно компенсации разностей времени прохождения, также можно корректировать сами времена прохождения, а затем, как обычно, определить из них разность времени прохождения.
Вычислительный блок предпочтительно выполнен с возможностью линейной аппроксимации функции. Линейная аппроксимация возможна при сравнительно небольших усилиях, однако она достаточна для коррекции колебаний. Таким образом, это представляет собой пример характеристической величины функции. Остающаяся статистическая погрешность существенно зависит от количества измерительных лучей, что приводит к высокой масштабируемости относительно точности и стоимости ультразвукового расходомера. Оценка не подвержена риску, поскольку даже при отсутствии подходящих конфигураций измерительных лучей, в которых, например, все измерительные лучи имеют одинаковое осевое расстояние, результатом является просто усреднение отдельных измерений. Альтернативно линейной аппроксимации также можно попытаться восстановить колебания в целом. Однако это значительно сложнее, требует наличия большего количества измерительных лучей для получения дополнительных опорных точек и, тем не менее, не обязательно приведет к получению лучших результатов.
Вычислительный блок предпочтительно выполнен так, чтобы предполагать ничтожно малую разность времени прохождения при ничтожно малом осевом расстоянии для линейной аппроксимации. Таким образом, без измерения получают дополнительную опорную точку, или постоянное смещение искомой прямой изначально определяют как ноль. Это также является разумным, не приближенным или даже не ошибочным предположением, поскольку ультразвук перемещается на таком гипотетическом измерительным луче перпендикулярно потоку, и таким образом, ему требуется одинаковое время в обоих направлениях. В случае альтернативной компенсации уже на уровне времен прохождения, а не разностей времен прохождения, это предположение, конечно, не применимо, поскольку сами времена прохождения не становятся ничтожно малыми, а только одинаково продолжительными.
Вычислительный блок предпочтительно выполнен для определения компенсированного времени прохождения или разности времени прохождения из линейной аппроксимации при осевом расстоянии, соответствующем среднему значению осевых расстояний измерительных лучей. В идеальных условиях функция или ее линейная аппроксимация содержит равноценную информацию об измерении в каждой точке. Однако, вследствие флуктуаций измеренных значений в действительности она не равноценна для различных осевых расстояний, при этом следует ожидать, что информация будет ухудшаться вдали от измеренных опорных точек. Таким образом, особенно подходящей является оценка в пределах области, определенной опорными точками, при этом среди этих точек среднее значение осевых расстояний измерительных лучей может быть использовано в качестве однозначно определяемого, хорошо подходящего значения.
Предпочтительно предусмотрено наличие по меньшей мере четырех измерительных лучей. Это снова относится к измерительным лучам, используемым вместе для восстановления колебаний или для линейной аппроксимации. Таким образом, упомянутые по меньшей мере четыре измерительных луча имеют различное осевое смещение и предпочтительно находятся в одной и той же продольной плоскости, более предпочтительно непосредственно один за другим. Для надежного восстановления или выравнивания, или линейной аппроксимации колебаний достаточно четырех значений. Хотя меньшее количество измерительных лучей и, таким образом, значений возможно, однако они не могут в достаточной мере определить функцию без дополнительной информации, например, о частоте колебаний и, таким образом, они могут ввести дополнительные погрешности. Дополнительные измерительные лучи и, таким образом, значения не являются математически необходимыми, однако они весьма предпочтительны, поскольку эта избыточность может компенсировать статистические эффекты вследствие погрешностей измерения, допусков и тому подобного. В этом случае необходимо достичь баланса между затратами и требованиями точности.
Ультразвуковые преобразователи предпочтительно размещены снаружи на трубопроводе. Под этим сначала подразумеваются обе возможности накладной установки или врезной установки. Преимущество заключается в том, что внутренняя часть трубопровода остается неповрежденной, при этом, возможно, ультразвуковые преобразователи могут быть доукомплектованы или переоборудованы без открытия трубопровода. При этом в соответствии с концепцией устройства трубопровод должен передавать ультразвук или даже специально возбуждаться. Поэтому следует учитывать особенно большие эффекты вследствие конструкционного шума, причем демпфирование невозможно, поскольку оно может одновременно влиять на чувствительность измерения. Однако изобретение может обеспечить значительное уменьшение негативного влияния конструкционного шума на точность измерения времени прохождения и, таким образом, на систематическую погрешность измерения расхода.
Предпочтительно, стенка трубопровода имеет множество карманов, внутри которых расположена тонкостенная область, при этом ультразвуковые преобразователи расположены в каждом кармане и имеют колебательный элемент, соединенный с тонкостенной областью, действующей в качестве колеблемой мембраны ультразвукового преобразователя. При такой врезной установке не только внутренняя часть трубопровода остается без негативных изменений, но благодаря возбуждению тонкостенной области ультразвуковой сигнал также очень хорошо связывается с текучей средой. Кроме того, возможно выполнение не диаметральных измерительных лучей.
Способ согласно изобретению может быть дополнительно модифицирован аналогичным образом и обладать при этом аналогичными преимуществами. Такие предпочтительные признаки являются иллюстративными, при этом они не описаны окончательно в зависимых пунктах формулы изобретения, зависящих от независимых пунктов.
Измерения времени прохождения или разности времени прохождения вдоль измерительного луча предпочтительно принимают за опорную точку функции, описывающей время прохождения или разность прохождения в зависимости от осевого расстояния. Таким образом, измерения и измерительные лучи служат для точечного определения этой функции для получения более точного измеренного значения с меньшей систематической погрешностью. Для этого функция может быть восстановлена, приближена, интерполирована из этих измерений или может быть определена характеристическая величина функции.
Предпочтительно, выполняют линейную аппроксимацию функции. Это может быть легко выполнено и одновременно обеспечивает достижение очень хороших результатов. В частности, скорость потока определяют из значения функции на осевом расстоянии, соответствующем центру масс осевых расстояний измерительных лучей. Выше было объяснено, что целесообразно использовать или считывать функцию там, где она особенно надежно определена посредством опорных точек в реальных условиях с допусками измерения.
Изобретение раскрывается более подробно ниже также в отношении его дополнительных признаков и преимуществ посредством примеров с помощью вариантов его осуществления и со ссылками на прилагаемые чертежи. На чертежах показано:
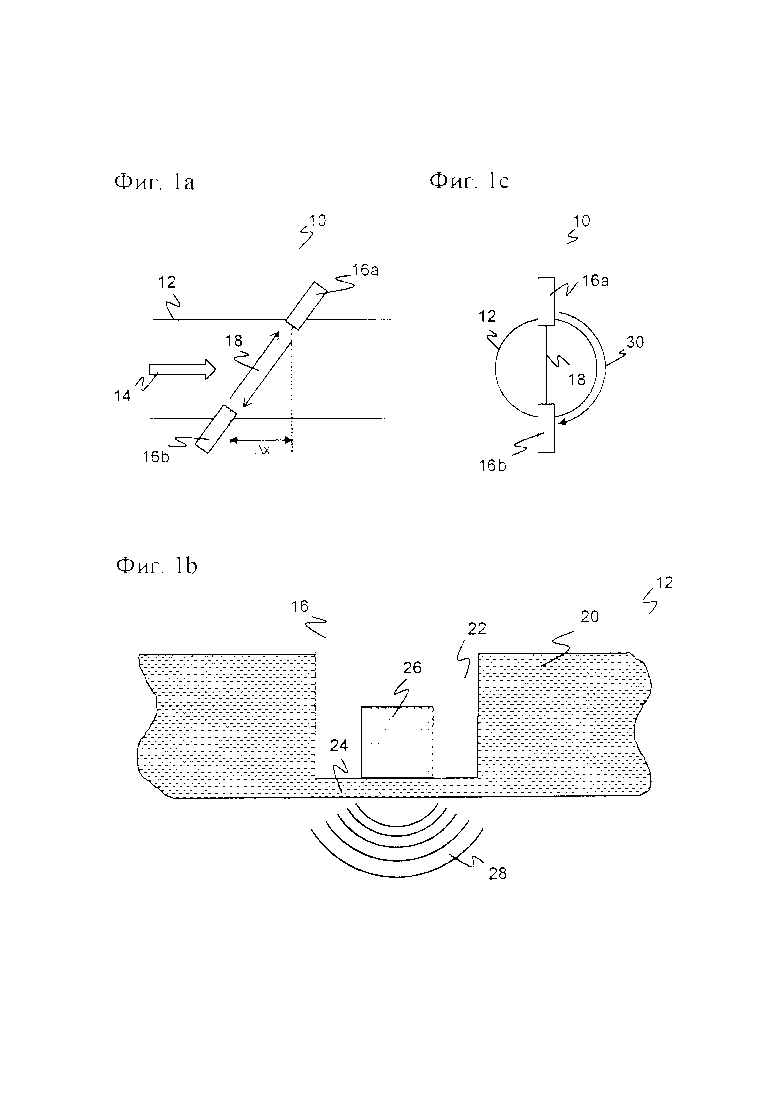
фиг. 1а - схематический вид в продольном разрезе трубопровода для объяснения способа на основе разности времен прохождения для измерения расхода с помощью ультразвука;
фиг. 1b - схематический вид стенки трубопровода для объяснения врезной установки ультразвукового преобразователя;
фиг. 1с - схематический вид в поперечном разрезе трубопровода для иллюстрации распространения корпусного или конструкционного шума;
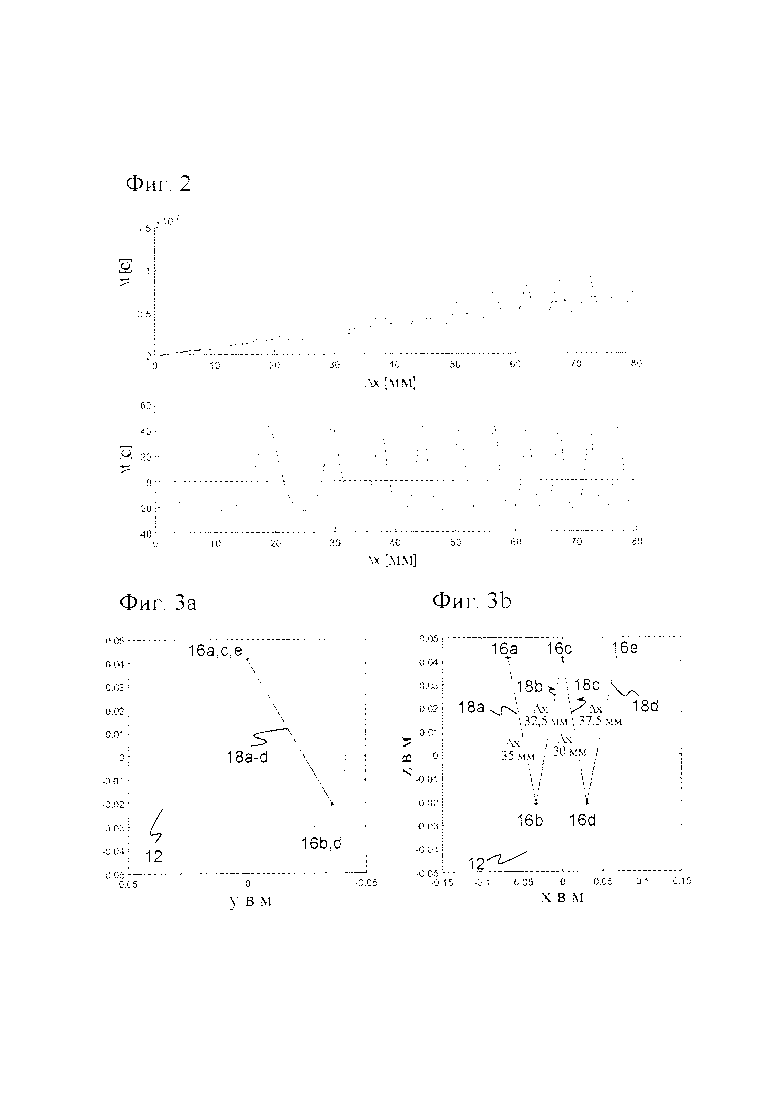
фиг. 2 - вид функции разности времени прохождения в зависимости от осевого расстояния ультразвуковых преобразователей измерительного луча (сверху) и относительная погрешность до невозмущенного случая без конструкционного шума (внизу) из простого моделирования;
фиг. 3а - вид в поперечном разрезе конфигурации измерительного луча согласно изобретению;
фиг. 3b - вид в продольном разрезе конфигурации измерительного луча согласно изобретению согласно фиг. 3а;
фиг. 4 - вид функции разности времени прохождения в зависимости от осевого расстояния ультразвуковых преобразователей и значения четырех измерительных лучей для конфигурации измерительного луча согласно фиг. 3 при скоростях звука в текучей среде 1200 м/с (сверху) и 2000 м/с (внизу); и
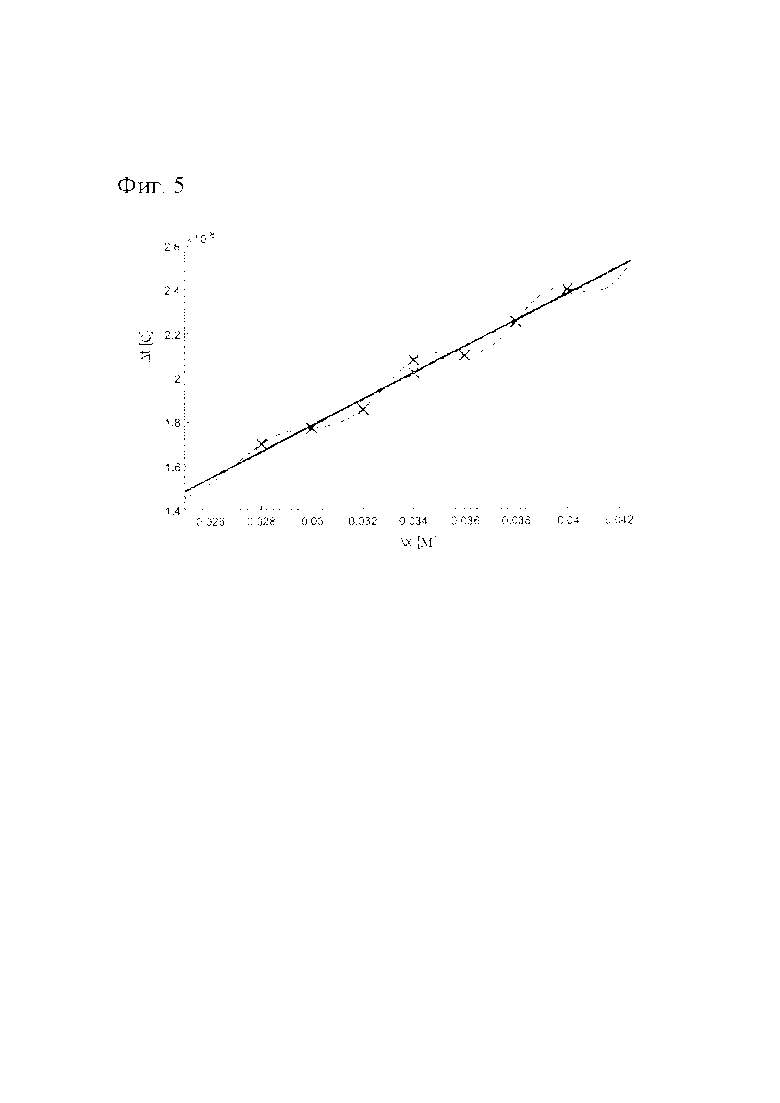
фиг. 5 - дополнительный вид функции разности времени прохождения в зависимости от осевого расстояния ультразвуковых преобразователей со значениями семи измерительных лучей для дополнительной конфигурации измерительного луча.
На фиг. 1 показан в продольном разрезе ультразвуковой расходомер 10 в соответствии со способом на основе разности времен прохождения, установленный на трубопроводе 12. Текучая среда течет через трубопровод 12 в направлении, указанном стрелкой 14. Пара ультразвуковых преобразователей 16а-b расположена на стенке трубопровода для излучения и приема ультразвукового сигнала выборочно в одном или другом направлении вдоль измерительного луча 18, определенного между этими ультразвуковыми преобразователями 16а-b. Акустическая волна, распространяющаяся через текучую среду, также называется звуком в текучей среде.
Оба ультразвуковых преобразователя 16а-b смещены относительно друг друга в продольном направлении трубопровода 12, при этом Δх обозначает соответствующее осевое расстояние. Благодаря этому звук в текучей среде движется в одном направлении с потоком и в другом направлении против потока. Это приводит к разности времени прохождения, из которой можно вычислить скорость потока текучей среды. Оценка, также известная на сегодня, выполняется в не показанном управляющем и вычислительном блоке ультразвукового расходомера 10, соединенном с ультразвуковыми преобразователями 16а-b.
Трубопровод 12 образует измерительный элемент ультразвукового расходомера 10 в области ультразвукового измерения. Изображение выбрано так, как если бы этот измерительный элемент был интегральной составной частью имеющегося трубопровода 12. Принципиально это возможно, однако на практике ультразвуковой расходомер 10 изготавливается со своим собственным измерительным элементом, который после установки заменяет соответствующий участок имеющегося трубопровода и для этого, например, вставляется на обеих сторонах с помощью фланцевых соединений.
На фиг. 1 показан, в качестве замены, только один измерительный луч 18. На самом деле ультразвуковое измерительное устройство содержит множество измерительных лучей 18, как описано более подробно ниже. При этом следует различать множество измерительных лучей 18, имеющих согласно изобретению различное осевое смещение Δх, но измеряющих поток практически в одной и той же точке, и множество лучей в обычном смысле. А именно, в обычном многолучевом счетчике множество измерительных лучей Образуют конфигурацию с различными траекториями через поперечное сечение трубопровода 12 для обеспечения возможности более точного измерения в случае неравномерного потока или возмущений. Это также возможно в соответствии с изобретением, однако при этом каждая группа измерительных лучей 18 с различным осевым смещением Δх заменяет обычный измерительный луч. Ниже эта возможность больше не упоминается, при этом для упрощения рассматривается только одна такая группа измерительных лучей 18, что также достаточно для довольно однородного потока и в противном случае представляет первое приближение для более сложного потока.
На фиг. 1b показано схематическое изображение стенки 20 трубопровода 12 для объяснения врезной установки ультразвукового преобразователя 16. Во врезной установке в значительной степени применяются преимущества изобретения, однако в альтернативном варианте также допустима накладная установка и, возможно, даже обычная интрузивная установка преобразователя.
В случае врезной установки в стенке 20 трубопровода выполняется полость или карман 22. Внутри в области кармана 22 от стенки 20 трубопровода остается тонкостенный участок 24, одновременно служащий в качестве мембраны ультразвукового преобразователя 16 и приводимый к колебаниям колебательным элементом 26, например, пьезоэлектрическим элементом, для излучения ультразвукового сигнала, или, наоборот, он приводится к колебаниям при попадании ультразвукового сигнала из внутренней части трубопровода 12 на участок 24 колебательного элемента 26. Для упрощения на фиг. 1b от ультразвукового преобразователя 16 показан лишь колебательный элемент 26. Тонкостенный участок 24 остается достаточно устойчивым, чтобы выдерживать ожидаемое внутреннее давление трубопровода. Стенка 20 трубопровода образует монолитную внутреннюю поверхность без углублений или выступов, которые могли бы возмущать поток или на которых могли бы образовываться отложения.
Как показано линиями 28 распространения звука, направление излучения или облучения ультразвуковых преобразователей 16 перпендикулярно средней линии трубопровода 12. Однако для получения осевого смещения Δх и, таким образом, обеспечения точности измерения в способе, основанном на разности времен прохождения, необходима относительно широкая характеристика излучения. В альтернативном варианте ультразвуковой преобразователь 16 может быть расположен наклонно, однако это конструктивно сложно и, возможно, также требует модификаций стенки 20 трубопровода, которые тоже влияют на поток.
На фиг. 1 с еще раз показана пара ультразвуковых преобразователей 16а-b с фиг. 1а, в данном случае в виде в поперечном разрезе. Диаметральное расположение является чисто иллюстративным, при этом измерительный луч 18 также может находиться около оси трубопровода 12. Угол, образуемый при этом измерительным лучом 18 с линией диаметра трубопровода 12, называется вневписанным углом.
В случае накладной или врезной установки, а также при недостаточном демпфировании интрузивно расположенных ультразвуковых преобразователей 16а-b, помимо требуемого звука в текучей среде, с помощью которого измеряются времена прохождения, дополнительно возникает корпусный или конструкционный шум, проходящий через трубопровод 12 и также достигающий противоположного ультразвукового преобразователя 16а-b, например, по траектории распространения, указанной стрелкой 30. Конструкционный шум не зависит от потока и, таким образом, не содержит полезной информации о скорости потока, однако он также возбуждает противоположный ультразвуковой преобразователь 16а-b даже с той же самой частотой. Это наложение звука в текучей среде и конструкционного шума приводит к погрешностям измерения.
Вышеописанный случай рассматривается ниже сначала посредством сильно упрощенного математического анализа влияния конструкционного шума на измерение времени прохождения. Как правило, при реальном измерении разности времени прохождения как звук в текучей среде, так и конструкционный шум имеют несколько ограниченных по времени импульсов, которые обычно перекрываются. Однако в качестве упрощения предполагается, что как звук в текучей среде, так и конструкционный шум представляют собой одночастотные гармонические колебания с одинаковой частотой и соответственно постоянной амплитудой, детектируемые приемным ультразвуковым преобразователем 16а-b после их соответствующего времени прохождения через текучую среду или трубопровод 12.
Кроме того, в качестве дополнительного упрощения предполагается, что имеется лишь один сигнал конструкционного шума с соответствующей скоростью звука.
Фактически, обычно может существовать несколько мод конструкционного шума с разной скоростью звука и, возможно, дисперсионным поведением. В указанных выше условиях получается следующее моделирование компонентов сигнала:


Здесь AFluid и AStruktur представляют собой амплитуды компонента текучей среды или конструкционного компонента, ω - рабочая угловая частота ультразвуковых преобразователей 16a-b, t - время и ϕFluid-A-B/BA, ϕStruktur - сдвига по фазе сигналов на приемном ультразвуковом преобразователе 16а-b. Последние должны относиться к времени прохождения (TOF) невозмущенного сигнала в текучей среде в случае отсутствия потока (VOF - скорость текучей среды). Таким образом, имеет место равенство ϕFluid-A-B=ϕFluid-BA=0 при VOF=0.
В случае конечной скорости потока (VOF), абсолютные времена прохождения и, таким образом, фазы сигналов в текучей среде изменяются приблизительно симметрично для обоих направлений измерения, и, таким образом, 
 для VOF≠0.
для VOF≠0.
При этом результирующая разность времени прохождения (Δt) зависит, помимо скорости потока, также от скорости звука в текучей среде (SOSFluid) и линейно от осевого расстояния Δх:
Эта линейная зависимость от Ах может быть предпочтительно использована ниже для оценки и компенсации системных погрешностей измерений вследствие конструкционного шума.
Фаза конструкционного шума не зависит от потока в трубопроводе 12 и получается из абсолютной разности времени прохождения конструкционного шума и звука в текучей среде в случае отсутствия потока:


Здесь L обозначает соответствующую протяженность пути через текучую среду или через стенку 20 трубопровода.
Приемный ультразвуковой преобразователь 16а-b всегда измеряет следующее наложение звука в текучей среде и конструкционного шума для времен t≥TOFFluid>TOFStruktur в зависимости от направления измерения:


Измеряемая величина представляет собой устанавливаемую эффективную разность фаз δ наложенных сигналов от прямого и обратного направления, поскольку она точно соответствует разности времени прохождения, определенной в ультразвуковом расходомере 10. Вычисление основано на следующей теореме сложения для тригонометрических функций:

Представляет интерес получаемая фаза δ наложения, для которой имеет место:
При применении этого выражения для наложений SignalA-B, SignalBA, может быть получена разность фаз Δδ или измеренная разность  времени прохождения между направлениями измерений непосредственно из аргументов функции синуса:
времени прохождения между направлениями измерений непосредственно из аргументов функции синуса:

Из этого следует, при подстановке указанных в начале компонентов сигнала в формулу для фазы 6 наложения, которая следует из теоремы сложения,
Для невозмущенного случая (AStruktur=0) выражение снова упрощается, как и ожидалось:

Разность времени прохождения и, таким образом, также разность фаз, как указано выше в формуле для Δt, определены только осевым расстоянием Δх, а также скоростью потока и скоростью звука в текучей среде. В возмущенном случае с AStruktur>0 в качестве дополнительных входных параметров добавляются амплитуды AFluid и AStruktur или их отношение, а также относительная фаза ϕStruktur конструкционного шума. Как указано выше, последняя зависит от длины пути в текучей среде и от длины пути в конструкции, а также от скорости звука в текучей среде и скорости конструкционного шума обоих компонентов сигнала. Изменения в длинах пути и/или скоростях звука изменяют относительную фазу ϕStruktur конструкционного шума.
Ниже рассматривается случай, когда амплитуды, скорости звука и скорость потока постоянны, тогда как осевое расстояние Δх ультразвуковых преобразователей 16а-b изменяется в продольном направлении или вдоль оси трубопровода. При этом возникают обратные воздействия, с одной стороны, на разность Δt времени прохождения в текучей среде, а также на длины L пути обоих компонентов сигнала и, таким образом, на относительную фазу конструкционного шума ϕStruktur. Для диаметрального пути, как на фиг. 1а, для длин пути имеет место
 и
и
Здесь Di - внутренний диаметр трубопровода 12, и W - толщина стенки 20 трубопровода.
На фиг. 2 показан пример функции разностей времени прохождения в зависимости от осевого расстояния Δх для значений от 0 до 80 мм согласно этой модели, в которой разность времени прохождения ведет себя согласно указанной выше формуле для Δδ. При этом на верхней части показана разность времени прохождения, а на нижней части - относительная погрешность для невозмущенного случая. В качестве трубопровода 12 была взята труба DN80 с толщиной стенки 4 мм, при этом скорость потока составляла 1 м/с и частота преобразователя ультразвукового преобразователя 16а-b - 700 кГц. Кроме того, для звука в текучей среде выбрана скорость звука 1480 м/с при амплитуде 1 и для конструкционного шума - скорость звука 3000 м/с при амплитуде 0,3.
Также показан невозмущенный случай AStruktur=0, описываемый, как и ожидалось, линейной зависимостью между разностью времени прохождения и осевым расстоянием Δх. Если, напротив, конструкционный шум наложен на звук в текучей среде, то эта линейная форма модулируется асимметричными негармоническими колебаниями, которые, в зависимости от положения ультразвуковых преобразователей 16а-b, вызывают значительные погрешности в измеренной разности времени прохождения по сравнению с чистым звуком в текучей среде. Амплитуда колебаний и, таким образом, высота максимальной погрешности зависят от отношения амплитуд компонентов сигнала. В случае выбранного в данном случае отношения конструкционного шума к шуму в текучей среде, равного 3:10, максимальная погрешность составляет приблизительно 43%.
Периодичность возмущения не может быть указана явным образом, однако она неявно вытекает из требования ϕStruktur(Δх2-Δх1)=2π, которое также выводится из принятой выше модели. Эта периодичность, таким образом, зависит от длин пути и скоростей звука в текучей среде и конструкционного шума. Тогда как длины пути могут быть определены в рамках конструкции устройства, скорость звука в текучей среде является, при определенных условиях, сильно изменяющимся параметром процесса, который не может быть предсказан со стороны устройства. Таким образом, единственный измерительный луч 18 может, в зависимости от скорости потока в текучей среде, испытывать все составляющие погрешности конструкционного шума, возможные в рамках возникающих колебаний. В рассматриваемом здесь примере это приводит к очень значительной области погрешностей, составляющей приблизительно 65% (от -20% до 45%).
На фиг. 3а в поперечном разрезе и на фиг. 3b в продольном разрезе показана иллюстративная конфигурация измерительных лучей 18a-d, реализующая различные осевые расстояния Δх ультразвуковых преобразователей 16а-е, в каждом случае определяющих измерительный луч 18a-d. Таким образом, полученные знания о влиянии конструкционного шума на разности времени прохождения могут быть использованы по существу для компенсации эффектов осциллирующей модуляции. Следует отметить, что, хотя при рассмотрении модели были сделаны значительно упрощающие предположения, ключевые утверждения и выводы подтверждаются в вычислениях в рамках изобретения, в которых эти упрощения больше не предполагаются.
Осевые расстояния Δх и, таким образом, длины лучей должны быть выбраны таким образом, что колебания разности времени прохождения могут быть считаны в достаточной степени для, по возможности, всех применимых, но в конкретном случае неизвестных скоростей звука в текучей среде. Решающими в данном случае являются скорости звука текучей среды и стенка 20 трубопровода, а также отношения длин пути, которые, в свою очередь, зависят от диаметра трубопровода и возможных углов лучей.
В показанном примере с трубой DN80 и реалистичными скоростями звука в текучей среде от 1200 до 2000 м/с, предпочтителен шаг осевых расстояний Δх, составляющий не более 3 мм. На фиг. 3 выбран вневписанный угол 30°, т.е. угол по отношению к вертикальному диаметру поперечного сечения, при этом осевые расстояния Δх составляют от 30 мм до 37,5 мм, как показано на фиг. 3b. Разумеется, возможны и другие числовые значения для вневписанных углов, осевых расстояний Δх и другая конфигурация лучей.
Как можно видеть на фиг. 3, предпочтительно расположить измерительные лучи 18a-d в общей продольной плоскости, параллельной оси трубопровода. В случае также предпочтительного равного вневписанного угла они совпадают при этом в виде в поперечном разрезе на фиг. 3а, т.е. они лежат друг за другом. Кроме того, в виде в продольном разрезе на фиг. 3b можно видеть вид пилообразную или зигзагообразную структуру измерительных лучей 18a-d. С одной стороны, это имеет то преимущество, что измерительные лучи 18a-d лежат непосредственно друг за другом. Можно предположить, что поток заметно не изменяется на этом коротком расстоянии, так что измерительные лучи 18a-d имеют практически одну и ту же составляющую потока, причем, как и требовалось, изменение имеет место только на осевом расстоянии Δх.
Пилообразное расположение имеет то преимущество, что средние ультразвуковые преобразователи 16b-d имеют двойное назначение на, соответственно, двух соседних измерительных лучах 18a-d, так что четыре измерительных луча 18a-d возможны с всего лишь пятью ультразвуковыми преобразователями 16а-е вместо восьми ультразвуковых преобразователей. Для этой цели достаточен сравнительно небольшой угол излучения, который, согласно расположению на фиг. 1b, также может потребоваться для измерительного луча 18a-d. Благодаря этому чередующемуся расположению также отсутствуют конструктивные проблемы между ультразвуковыми преобразователями 16а, с, е; 16b, d на одной стороне. Тем не менее, также возможны другие расположения, исключающие двойное назначение или реализующие его в смешанных формах только для части измерительных лучей. Примером является ультразвуковой преобразователь на одной стороне трубопровода 12, напротив которого находится множество ультразвуковых преобразователей с увеличивающимся осевым расстоянием Δх. Количество измерительных лучей 18a-d также может изменяться. Дополнительные измерительные лучи обеспечивают лучшее считывание колебаний, однако они также приводят к большим затратам, так что в этом случае должен быть найден баланс. В принципе также возможно меньшее количество измерительных лучей, при этом, однако, следует понимать, что даже регулярные колебания могут быть восстановлены только посредством четырех точек, так что в этом случае следует ожидать потерю точности.
На фиг. 4 показан вид колебаний, полученных из формулы для Δδ сходно с фиг. 2 выше и при сопоставимых условиях для параметров, неявно названных иным образом. При этом на верхней части скорость звука в текучей среде составляет 1200 м/с и на нижней части - 2000 м/с, причем диапазон осевого расстояния Δх по оси X ограничен соответствующим участком вокруг осевых расстояний Δх конфигурации лучей согласно фиг. 3.
При работе разности времени прохождения определяются теперь на разных измерительных лучах 18a-d и назначаются соответствующему осевому расстоянию Δх измерительного луча 18a-d. Благодаря этому в случае конфигурации с четырьмя лучами, как на фиг. 3, возникают четыре значения, помеченные как X на фиг 4. Эти значения могут быть повторно измерены и усреднены. Из этих четырех значений затем восстанавливаются колебания для вычисления их влияния.
Предпочтительной возможностью для этого является линейная аппроксимация. Это предпочтительно не только вследствие сравнительно небольших вычислительных затрат, но также и потому, что выведенное выше соотношение для разности времени прохождения является линейным по Δх без влияния конструкционного шума. Таким образом, линейное поведение соответствует искомому случаю чистого звука в текучей среде. Поскольку при ничтожно малом осевом расстоянии Δх также не возникает никакой разности времени прохождения, прямая линейной аппроксимации может быть построена без участка оси Y.
В принципе, разность времени прохождения теперь может быть считана в каждой точке определенной прямой и с помощью соответствующего осевого расстояния Δх завершена до длины пути для вычисления скорости потока. Однако следует ожидать, что прямая особенно точно воспроизводит условия в области фактических опорных точек не только вследствие неизбежных флуктуаций измерения, но и вследствие неравномерных колебаний. Поэтому считывание предпочтительно выполняется в области опорных точек, в частности в местоположении, соответствующем среднему значению реализованных осевых расстояний Δх. Здесь ожидается высокое качество математической аппроксимации.
Если обозначить считанные значения в описанном выше местоположении, или в другом местоположении прямой как  и
и  , и потребовать, чтобы, дополнительно, скорость звука в текучей среде была известна другим способом, то из соображений приведенной выше модели следует эффективная скорость луча в виде
, и потребовать, чтобы, дополнительно, скорость звука в текучей среде была известна другим способом, то из соображений приведенной выше модели следует эффективная скорость луча в виде
Как упомянуто выше, это относится к идеализированному случаю, когда все измерительные лучи 18a-d имеют одно и то же состояние потока. В противном случае при линейной аппроксимации возникают отклонения. Поэтому предпочтительно, если измерительные лучи 18a-d не отклоняются друг от друга в радиальном направлении, поскольку в используемой установке не следует ожидать осесимметричных профилей потока. Эффекты от профиля потока могут быть сведены к минимуму, если измерительные лучи 18a-d, как в примере на фиг. 3, расположены непосредственно друг за другом параллельно оси трубопровода в продольном направлении. В этом случае можно правомерно исходить из того, что на очень коротком расстоянии в продольном направлении в профиле потока не возникают никаких существенных изменений. Для учета различий потока также в радиальном направлении, могут быть образованы, как упоминалось выше, дополнительные группы, соответствующие измерительным лучам 18a-d, в другом положении по отношению к поперечному сечению, которые в этом случае соответствуют по группам лучам обычного многолучевого счетчика.
На фиг. 5 еще раз показан вид колебаний или функция разности времени прохождения в зависимости от осевого расстояния Δх сходно фиг. 4, но для другого примера. Здесь используются семь измерительных лучей вместо четырех, при этом осевое расстояние Δх изменяется на 2 мм. Определенные на измерительных лучах разности времени прохождения присваиваются осевому расстоянию Δх соответствующего измерительного луча, и, соответственно, помечены как X.
На фиг. 5 для определения колебаний используется не представленная здесь простая модель, но гораздо более реалистичное моделирование с реалистичными формами сигналов и отношениями амплитуд, а также с тремя модами конструкционного шума, в каждом случае с собственными скоростями звука и собственными дисперсионными характеристиками. Результирующие колебания имеют несколько иную характеристику, однако качественно они отличаются очень мало и очевидно по-прежнему обеспечивают возможность оценки, как описано выше. В частности, возможна линейная аппроксимация, показанная на фиг. 5 в виде прямой и восстанавливающая теоретический ход невозмущенного измерения только звука в текучей среде без конструкционного шума. Снова предпочтительно для дополнительной оценки взять за основу не какую-либо точку прямой, а центр масс осевых расстояний Δх, с которыми фактически были проведены измерения. Это показано на фиг. 5 посредством нижнего X на осевом расстоянии Δх, равном 34 мм.

Заявлено ультразвуковое устройство (10) измерения расхода с множеством ультразвуковых преобразователей (16а-е) для определения скорости потока текучей среды, текущей в трубопроводе (12), имеющее множество измерительных лучей (18a-d), на каждом из которых расположены два из ультразвуковых преобразователей (16а-е) напротив друг друга, с потоком между ними и на осевом расстоянии (Δх) друг от друга в продольном направлении трубопровода (12), и вычислительный блок, выполненный с возможностью вычисления скорости потока из разностей времени прохождения ультразвуковых сигналов вдоль соответствующих измерительных лучей (18a-d) в направлении по потоку и против потока. При этом измерительные лучи (18a-d) имеют разное осевое смещение (Δх). Технический результат – повышение точности измерений. 2 н. и 13 з.п. ф-лы, 5 ил.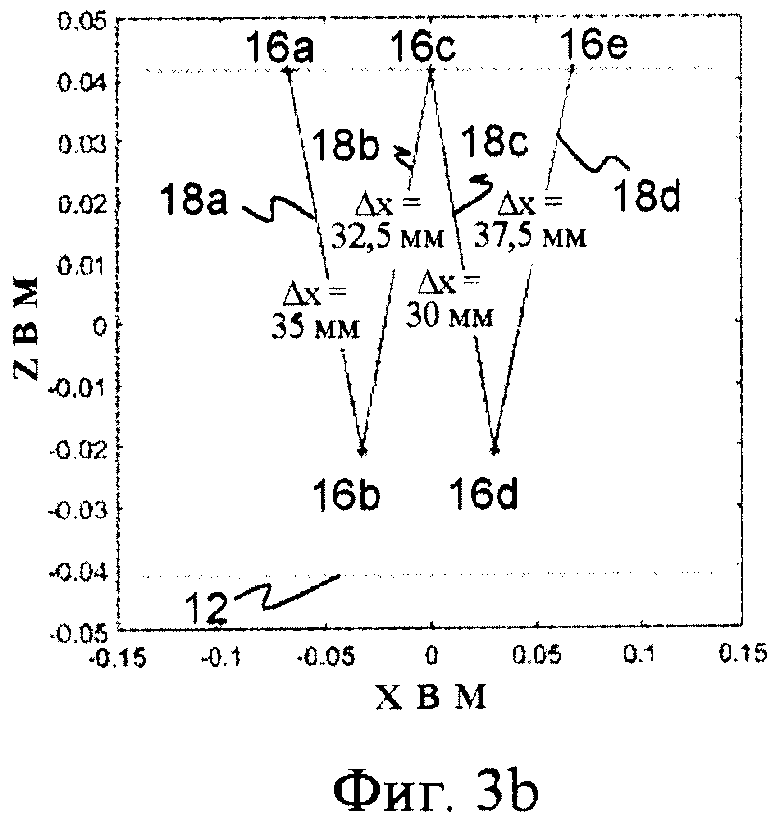
1. Ультразвуковое устройство (10) измерения расхода с множеством ультразвуковых преобразователей (16а-е) для определения скорости потока текучей среды, текущей в трубопроводе (12), имеющее множество измерительных лучей (18a-d), на каждом из которых расположены два из ультразвуковых преобразователей (16а-е) напротив друг друга, с потоком между ними и на осевом расстоянии (Δх) друг от друга в продольном направлении трубопровода (12), и вычислительный блок, выполненный с возможностью вычисления скорости потока из разностей времени прохождения ультразвуковых сигналов вдоль соответствующих измерительных лучей (18a-d) в направлении по потоку и против потока, отличающееся тем, что измерительные лучи (18a-d) имеют разное осевое смещение (Δх).
2. Ультразвуковое устройство (10) измерения расхода по п. 1, в котором все измерительные лучи (18a-d) расположены в общей плоскости, параллельной трубопроводу (12).
3. Ультразвуковое устройство (10) измерения расхода по п. 1 или 2, в котором измерительные лучи (18a-d) расположены непосредственно друг за другом.
4. Ультразвуковое устройство (10) измерения расхода по любому из пп. 1-3, в котором измерительные лучи (18a-d) вместе имеют пилообразную форму.
5. Ультразвуковое устройство (10) измерения расхода по п. 4, в котором ультразвуковые преобразователи (16а-е) на вершинах пилообразной формы задействованы на обоих соседних измерительных лучах (18a-d).
6. Ультразвуковое устройство (10) измерения расхода по любому из пп. 1-5, в котором вычислительный блок предпочтительно выполнен для оценки по меньшей мере одной характеристической величины функции, описывающей зависимость времени прохождения или разности времени прохождения от осевого расстояния (Δх) ультразвуковых преобразователей (16а-е), из множества измерений на множестве измерительных лучей (18a-d) и для вычисления скорости потока из этой характеристической величины.
7. Ультразвуковое устройство (10) измерения расхода по п. 6, в котором вычислительный блок выполнен с возможностью линейной аппроксимации функции.
8. Ультразвуковое устройство (10) измерения расхода по п. 7, в котором вычислительный блок выполнен так, чтобы предполагать, что разность времени прохождения ничтожно мала при ничтожно малом осевом расстоянии (Δх) для линейной аппроксимации.
9. Ультразвуковое устройство (10) измерения расхода по п. 6 или 7, в котором вычислительный блок выполнен с возможностью определения компенсированного времени прохождения или разности времени прохождения из линейной аппроксимации при осевом расстоянии (Δх), соответствующем среднему значению осевых расстояний (Δх) измерительных лучей (18a-d).
10. Ультразвуковое устройство (10) измерения расхода по любому из пп. 1-9, в котором предусмотрено наличие по меньшей мере четырех измерительных лучей (18a-d).
11. Ультразвуковое устройство (10) измерения расхода по любому из пп. 1-10, в котором ультразвуковые преобразователи (16а-е) размещены снаружи на трубопроводе (12).
12. Ультразвуковое устройство (10) измерения расхода по п. 11, в котором стенка (20) трубопровода (12) имеет множество карманов (22), внутри которых расположена тонкостенная область (24), при этом ультразвуковые преобразователи (16а-е) расположены в каждом кармане (22) и имеют колебательный элемент (26), соединенный с тонкостенной областью (24), действующей в качестве колеблемой мембраны ультразвукового преобразователя (16а-е).
13. Способ определения скорости потока текучей среды, текущей в трубопроводе (12), в котором вдоль множества измерительных лучей (18a-d), каждый из которых образован двумя ультразвуковыми преобразователями (16а-е) с потоком между ними и со взаимным осевым расстоянием (Δх) в продольном направлении трубопровода (12), испускают и принимают ультразвуковые сигналы в направлении по потоку и против потока, при этом скорость потока вычисляют из разностей времени прохождения ультразвуковых сигналов, отличающийся тем, что измерительные лучи (18a-d) имеют разное осевое смещение (Δх).
14. Способ по п. 13, в котором измерения времени прохождения или разности времени прохождения вдоль измерительного луча (18a-d) принимают за опорную точку функции, описывающей время прохождения или разность времени прохождения в зависимости от осевого расстояния (Δх), при этом функцию восстанавливают, приближают, интерполируют из этих измерений или определяют характеристическую величину функции.
15. Способ по п. 14, в котором выполняют линейную аппроксимацию функции, при этом, в частности, скорость потока определяют из значения функции на осевом расстоянии (Δх), соответствующем центру масс осевых расстояний (Δх) измерительных лучей (18a-d).
| DE 202013105800 U1, 30.04.2015 | |||
| EP 1378272 B9, 16.08.2006 | |||
| US 4467659 A1, 28.08.1984 | |||
| WO 2016094144 A1, 16.06.2016. |

