Изобретение относится к способу определения уровня наполнения в резервуаре для жидкости. Способ может быть применен, прежде всего, для определения уровня наполнения в резервуаре в транспортном средстве, в котором хранится жидкая добавка для очистки отработавших газов (ОГ).
Транспортные средства с устройствами для обработки ОГ, в которые для очистки ОГ вводится жидкая добавка, широко распространены. Особо часто встречаются такие устройства для обработки ОГ, в которых осуществляется способ селективного каталитического восстановления (способ СКВ). При этом способе соединения оксидов азота в ОГ с помощью аммиака восстанавливаются до безвредных веществ, таких как азот, вода и CO2. Обычно аммиак запасается в транспортном средстве не как таковой, а в форме жидкой добавки, которая может храниться в резервуаре. Тогда такая жидкая добавка для очистки ОГ вне ОГ в предусмотренном для этого реакторе или внутри ОГ в устройстве для обработки ОГ превращается в аммиак. Особо часто в качестве жидкой добавки применяется водный раствор мочевины. Водный раствор мочевины с содержанием мочевины 32,5% по массе продается под торговым названием AdBlue®.
Зачастую требуется получить информацию об уровне наполнения в резервуаре для жидкой добавки. Информация об уровне наполнения может быть использована для того, чтобы определить подходящие моменты времени для пополнения резервуара. Кроме того, можно предотвращать полное опорожнение резервуара во время работы.
Для определения уровня наполнения в резервуаре для жидкой добавки уже были предложены ультразвуковые датчики уровня наполнения. Ультразвуковые датчики уровня наполнения обычно имеют ультразвуковой передающий модуль и ультразвуковой принимающий модуль. Ультразвуковой передающий модуль испускает ультразвуковую волну, которая отражается на верхней поверхности жидкости внутри резервуара, а оттуда возвращается к ультразвуковому датчику уровня и принимается ультразвуковым принимающим модулем ультразвукового датчика уровня наполнения. Скорость распространения ультразвуковой волны в жидкости в резервуаре, либо известна, либо она определяется путем эталонного измерения. Из времени прохождения ультразвуковой волны от ультразвукового датчика уровня до уровня свободной поверхности жидкости и обратно к ультразвуковому датчику уровня наполнения и скорости распространения ультразвуковой волны в жидкости рассчитывается уровень наполнения в резервуаре.
Преимущество ультразвуковых датчиков уровня наполнения состоит в том, что они не имеют подвижных деталей. Кроме того, с помощью ультразвуковых датчиков уровня наполнения является возможным, измерять высоту наполнения в резервуаре и при разных высотах резервуара с помощью одной и той же конструкции датчика. Отличия относительно возможной высоты наполнения в резервуаре должны лишь быть сохранены в оценочном блоке, с помощью которого оцениваются принимаемые ультразвуковым принимающим модулем ультразвуковые волны. Принимаемые ультразвуковым принимающим модулем ультразвуковые волны, которые возвращаются на испускаемые ультразвуковым передающим модулем ультразвуковые волны и, например, были отражены на верхней поверхности жидкости, в дальнейшем также называются сигналами или же ответными сигналами, которые принимаются ультразвуковым принимающим модулем или же ультразвуковым датчиком уровня наполнения.
Известны два разных расположения ультразвуковых датчиков уровня наполнения в резервуаре. Согласно одному известному расположению ультразвуковые волны испускаются с верхней стороны на уровень свободной поверхности жидкости в резервуаре и оттуда отражаются обратно вверх к ультразвуковому датчику уровня наполнения. В еще одном известном расположении ультразвуковые волны испускаются ультразвуковым датчиком уровня наполнения на дне резервуара через жидкость к уровню свободной поверхности жидкости в резервуаре и отражаются от уровня свободной поверхности жидкости обратно к ультразвуковому датчику уровня наполнения на дне резервуара.
Выше уже пояснялось, что для определения скорости распространения ультразвуковых волн в жидкости может быть проведено контрольное измерение. Известно, что для контрольного измерения определяют время прохождения ультразвуковой волны вдоль известного измерительного участка в жидкости. Измерительный участок может быть выполнен, например, по меньшей мере с одной эталонной поверхностью, на которой отражается ультразвуковая волна. Предпочтительно, положение эталонных поверхностей или же расстояние между двумя эталонными поверхностями является точно известным. На основе времени прохождения ультразвуковой волны к эталонной поверхности или на основе разности времен прохождения ультразвуковых волн к нескольким (например, двум) эталонным поверхностям может быть определена скорость движения ультразвуковой волны в жидкости.
Проблематичным при проведении такого контрольного измерения является то, что заданный по меньшей мере одной эталонной поверхностью измерительный участок должен быть полностью расположен внутри жидкости. Это является проблематичным, прежде всего, при изменяющихся уровнях наполнения и высотах наполнения жидкости в резервуаре. Поэтому известно, что эталонные поверхности располагают так, что измерительный участок для определения скорости движения в ультразвуковой волне расположен горизонтально, предпочтительно поблизости от дна резервуара. За счет этого может быть обеспечено то, что измерение времени прохождения может быть проведено и при очень низких уровнях наполнения. Недостатком является то, что горизонтальное расположение измерительного участка требует относительно много конструктивного пространства на дне резервуара.
Исходя из этого, задача настоящего изобретения состоит в том, чтобы решить или же, по меньшей мере, смягчить указанные технические проблемы. Прежде всего, должен быть представлен особо благоприятный способ определения уровня наполнения в резервуаре для жидкости с ультразвуковым датчиком.
Эти задачи решены способом согласно признакам п. 1 формулы изобретения. Другие благоприятные варианты способа указаны в сформулированных как зависимые пунктах формулы изобретения. Приведенные в формуле изобретения отдельно признаки являются комбинируемыми друг с другом любым, технологически рациональным образом и могут быть дополнены поясняющими фактами из описания, причем показываются дополнительные варианты осуществления способа.
Изобретение относится к способу определения уровня наполнения в резервуаре, имеющем ультразвуковой датчик уровня наполнения и по меньшей мере две эталонные поверхности для отражения ультразвуковой волны, которая испускается ультразвуковым датчиком уровня наполнения, причем первая эталонная поверхность расположена под второй эталонной поверхностью, имеющему следующие шаги:
а) определение первой скорости распространения ультразвуковой волны в жидкости на первом измерительном участке от ультразвукового датчика уровня наполнения к первой эталонной поверхности,
б) определение второй скорости распространения ультразвуковой волны в жидкости на втором измерительном участке от первой эталонной поверхности ко второй эталонной поверхности,
в) измерение времени прохождения ультразвуковой волны от ультразвукового датчика уровня наполнения до уровня свободной поверхности жидкости в резервуаре,
г) выбор первой скорости распространения или второй скорости распространения в зависимости по меньшей мере от одного критерия выбора, и
д) расчет уровня наполнения с помощью измеренного на шаге в) времени прохождения и выбранной на шаге г) скорости распространения.
Ультразвуковой датчик, предпочтительно, расположен в днище резервуара или поблизости от днища резервуара. Ультразвуковой датчик уровня наполнения, предпочтительно, направлен вертикально вверх, так что ультразвуковые волны испускаются ультразвуковым датчиком уровня вертикально вверх. Первая эталонная поверхность и вторая эталонная поверхность, предпочтительно, расположены вертикально над ультразвуковым датчиком уровня наполнения. Ультразвуковой датчик уровня наполнения, предпочтительно, имеет передающий модуль для испускания ультразвуковых волн и принимающий модуль для приема ультразвуковых волн, причем принимающий модуль выполнен для того, чтобы принимать ультразвуковые волны, которые испускаются передающим модулем и отражаются на любой структуре (эталонные поверхности, уровень свободной поверхности жидкости в резервуаре и т.д.).
Шаги а), б) и в) способа, предпочтительно, по меньшей мере, частично выполняются вместе (одновременно). Особо предпочтительно, ультразвуковой датчик уровня наполнения испускает сигнал в форме ультразвуковой волны. Затем ультразвуковой датчик уровня наполнения принимает три отраженных ответных сигнала, которые получаются из испускаемой ультразвуковой волны. Первый сигнал идентифицируется как отражение на первой эталонной поверхности. С этим сигналом выполняется шаг а). Длина первого измерительного участка известна, и из интервала времени между испусканием ультразвуковой волны и приемом первого ответного сигнала может быть рассчитана первая скорость распространения. Второй ответный сигнал идентифицируется как отражение ультразвуковой волны на второй эталонной поверхности. Первый ответный сигнал и второй ответный сигнал используются для определения второй скорости распространения на шаге б). С помощью разности между моментом времени приема первого ответного сигнала и моментом времени приема второго ответного сигнала и (известной) длиной второго измерительного участка может быть рассчитана вторая скорость распространения. Третий ответный сигнал используется для того, чтобы выполнить шаг в) и определить время прохождения ультразвуковой волны от датчика уровня наполнения до уровня свободной поверхности жидкости в резервуаре. Время прохождения получается из интервала времени между испусканием ультразвуковой волны и приемом третьего ответного сигнала.
При необходимости, шаги а), б) и в) также могут выполняться по-другому (совместно или в другой последовательности). Описанное здесь пояснение шагов а), б) и в) следует понимать лишь как примерное.
Посредством выбора первой скорости распространения или второй скорости распространения в зависимости по меньшей мере от одного критерия выбора на шаге г) становится возможным, определять (актуальный уровень наполнения в резервуаре и тогда, если вторая (верхняя) эталонная поверхность расположена не внутри жидкости в резервуаре, а уровень свободной поверхности жидкости в резервуаре расположен между первой эталонной поверхностью и второй эталонной поверхностью. Прежде всего, критерии выбора определены так, что уровень наполнения определяется с помощью первой скорости распространения, если уровень свободной поверхности жидкости в резервуаре расположен под второй эталонной поверхностью. При более высоких уровнях наполнения (над второй эталонной поверхностью) для определения уровня наполнения выбирается вторая скорость распространения. Вторая скорость распространения имеет по сравнению с первой скоростью распространения то преимущество, что она является определяемой значительно точнее. Это объясняется тем, что расстояние между первой эталонной поверхностью и второй эталонной поверхностью установлено существенно точнее, чем расстояние между ультразвуковым датчиком уровня наполнения и первой эталонной поверхностью. Это обусловлено, прежде всего, тем, что первая эталонная поверхность и вторая эталонная поверхность расположены на (общей) калибровочной детали. В противоположность этому, ультразвуковой датчик является (отдельной от) эталонных поверхностей деталью, так что допуски расстояния между ультразвуковым датчиком уровня наполнения и первой эталонной поверхностью являются более неточными, чем допуски расстояния между обеими эталонными поверхностями. Первая скорость распространения по сравнению со второй скоростью распространения имеет то преимущество, что она является определяемой и при уровнях наполнения ниже второй эталонной поверхности.
Описанный способ делает возможным надежно определять и низкие уровни наполнения в резервуаре и одновременно обеспечивать вертикальное расположение ультразвукового датчика уровня наполнения в резервуаре. За счет значительно уменьшается занимаемая площадь датчика уровня наполнения на дне резервуара. Например, расположенный вертикально ультразвуковой датчик уровня наполнения с эталонными поверхностями может быть смонтирован в небольшом отверстии в днище резервуара. По сравнению с этим, ультразвуковой датчик уровня наполнения с горизонтально расположенными эталонными поверхностями требует более сложного монтажа и/или отверстия в днище резервуара, диаметр которого, по меньшей мере, таков же, как длина измерительного участка.
Способ является особо благоприятным, если ультразвуковой датчик уровня наполнения расположен вне резервуара, и ультразвуковая волна ультразвукового датчика уровня наполнения проходит стыковочный слой, прежде чем она входит в жидкость в резервуар, причем стыковочный слой содержит стенку резервуара (прежде всего, участок стенки резервуара), и время прохождения ультразвуковой волны в стыковочном слое на шаге а) учитывается с помощью корректировочного фактора.
Ультразвуковой датчик уровня наполнения, предпочтительно, расположен вне внутреннего пространства резервуара на противолежащей жидкости стороне стенки резервуара. Предпочтительно, стыковочный слой дополнительно к стенке резервуара содержит рабочее тело, которое соединяет ультразвуковой датчик уровня наполнения проводящим ультразвук образом со стенкой резервуара. Рабочее тело может содержать, например, передаточную пасту или передаточную подкладку, которая расположена между стенкой резервуара и ультразвуковым датчиком. Внутри стыковочного слоя ультразвуковые волны обычно имеют не такую скорость распространения, как в жидкости в резервуаре. Поскольку строение стыковочного слоя известно, может быть рассчитана скорость ультразвуковых волн в стыковочном слое и учтена на шаге а) в качестве корректировочного фактора. Корректировочный фактор, предпочтительно, имеет размерность времени. Предпочтительно, длительность, которая нужна ультразвуковым волнам для прохождения стыковочного слоя, определяется экспериментально и в виде корректировочного фактора откладывается в блоке управления для осуществления описанного способа.
Кроме того, способ является благоприятным, если при выборе скорости распространения на шаге г) учитывается, какая скорость распространения была выбрана при предшествующей итерации способа.
Описанный способ обычно (во время эксплуатации транспортного средства) итеративно повторяется, чтобы всегда можно было предоставлять актуальную информацию об уровне наполнения жидкости в резервуаре. Используемые и определенные в способе параметры (прежде всего, выбранная скорость распространения) в каждом случае откладываются в блоке управления транспортного средства. Поэтому является возможным, при итерации способа обращаться к параметрам, которые были определены при предшествующей итерации способа. Информация о выбранной скорости распространения при предшествующей итерации способа может быть использована на шаге в) дополнительно по меньшей мере к одному критерию выбора, чтобы выбрать одну из скоростей распространения. Например, возможность смены выбранной скорости распространения на шаге г) может быть деактивирована, если имеются определенные условия. Под сменой выбранной скорости распространения здесь имеется в виду, что при проведении способа выбирается не такая (первая или вторая) скорость распространения, как при предшествующей итерации способа. Например, может быть принципиально предотвращен переход от выбора первой скорости распространения (обратно) к выбору второй скорости распространения. Это означает, что при однократном выборе первой скорости распространения переход способа в последующую итерацию способа к первой скорости распространения является невозможным. Если выполнены дополнительные условия, переход (назад) к выбору второй скорости распространения снова может стать возможным.
Например, является возможным, что на шаге г) выбирается первая скорость распространения, так как по меньшей мере один критерий выбора дает понять, что уровень наполнения в резервуаре опустился ниже второй эталонной поверхности. Если это происходит в первый раз, выбор первой скорости распространения сохраняется в памяти. Предпочтительно, тогда первая скорость распространения остается выбранной до тех пор, пока не произошло повторное наполнение резервуара. Даже если по меньшей мере один критерий выбора, собственно говоря, задал бы переход назад ко второй скорости распространения, первая скорость распространения остается выбранной.
Кроме того, способ является благоприятным, если в качестве первого критерия выбора на шаге д) используется рассчитанный уровень наполнения, причем при уровне наполнения ниже предельной величины уровня наполнения выбирается первая скорость распространения, а при уровне наполнения выше предельной величины уровня наполнения выбирается вторая скорость распространения.
Предельная величина уровня наполнения, предпочтительно, расположена так, что при уровнях наполнения выше предельной величины уровня наполнения обе эталонные поверхности (надежно) расположены внутри жидкости, так что без проблем является возможным определение второй скорости распространения на втором измерительном участке между обеими эталонными поверхностями. В соответствии с этим предельная величина уровня наполнения, предпочтительно, установлена на уровне второй эталонной поверхности или же чуть выше второй эталонной поверхности. При уровнях наполнения ниже предельной величины уровня наполнения расчет уровня наполнения происходит, предпочтительно, с помощью второй скорости распространения, так что дальнейшее понижение уровня наполнения не влияет на определение уровня наполнения.
Кроме того, способ является благоприятным, если в качестве второго критерия выбора на шаге г) проводится сравнение между первой скоростью распространения и второй скоростью распространения, причем первая скорость распространения выбирается, если отклонение скорости между первой скоростью распространения и второй скоростью распространения превышает предельную величину.
Выше было описано, что первая скорость распространения, вторая скорость распространения и время прохождения определяются соответственно на основе трех ответных сигналов, которые один за другим на принимающем модуле ультразвукового датчика уровня наполнения входят в качестве ответа на испускаемую ультразвуковую волну. Если уровень свободной поверхности жидкости опускается ниже второй эталонной поверхности, на второй эталонной поверхности ультразвуковые волны больше не отражаются, так как все ультразвуковые волны уже отражаются на верхней поверхности жидкости. Таким образом, вторая эталонная поверхность для ультразвукового датчика уровня наполнения является невидимой. Вместо этого, уровень свободной поверхности жидкости рассматривается как вторая эталонная поверхность, так как он после первой эталонной поверхности производит второй ответный сигнал на испускаемую ультразвуковую волну. Поэтому при уровнях наполнения ниже второй эталонной поверхности сокращается установленное с помощью датчика уровня наполнения время прохождения между ответным сигналом, который соответствует первой эталонной поверхности и вторым ответным сигналом, который интерпретируется ультразвуковым датчиком как относящийся ко второй эталонной поверхности. В результате этого при уровнях наполнения ниже второй эталонной поверхности возникают отклонения между определенной на шаге б) второй скоростью распространения и определенной на шаге а) первой скоростью распространения. Из-за неточностей при измерениях скорости на шагах а) и б) отклонения в скорости между обеими скоростями распространения могут возникать и при уровнях наполнения выше второй эталонной поверхности. Но эти отличия в скорости относительно малы. Предпочтительно, предельная величина определена так, что регистрируются только те отличия в скорости, которые обоснованы понижением уровня наполнения под вторую эталонную поверхность.
Если уровень свободной поверхности жидкости опустился ниже второй эталонной поверхности, как правило, требуется соответствующий образ действий для шага в). Прежде всего, больше не является возможным, применять третий ответный сигнал на испускаемую ультразвуковую волну для определения времени прохождения. Напротив, следует использовать второй ответный сигнал для определения времени прохождения до уровня свободной поверхности жидкости, так как отражение ультразвуковой волны на верхней поверхности жидкости типично принимается ультразвуковым датчиком уровня наполнения в качестве второго ответного сигнала, если уровень свободной поверхности жидкости находится ниже второй эталонной поверхности.
Первый критерий выбора и второй критерий выбора, предпочтительно, используются оба, чтобы перейти от первой скорости распространения ко второй скорости распространения. Особо предпочтительно, оба критерия выбора должны задавать соответствующую смену скорости распространения, чтобы эта смена фактически произошла на шаге г).
Для перехода от первой скорости распространения (обратно) ко второй скорости распространения, предпочтительно, требуется, чтобы дополнительно еще один, поясненный в дальнейшем (третий) критерий выбора задавал соответствующий переход.
Способ является особо благоприятным, если в качестве третьего критерия выбора на шаге г) проверяется измеренное на шаге в) время прохождения, причем вторая скорость распространения не выбирается, если измеренное время прохождения находится вне интервала времени, который соответствует двойному времени прохождения до второй эталонной поверхности и при предшествующей итерации способа была выбрана первая скорость распространения.
Выше было описано, что для определения первой скорости распространения, второй скорости распространения и времени прохождения могут быть привлечены соответственно три ответных сигнала на испускаемую ультразвуковым датчиком уровня наполнения ультразвуковую волну. В связи со вторым критерием выбора было пояснено, что вторая эталонная поверхность при определенных обстоятельствах для ультразвукового датчика является невидимой, если уровень свободной поверхности жидкости находится ниже второй эталонной поверхности, так как в этом случае уровень свободной поверхности жидкости производит второй ответный сигнал и полностью отражает ультразвуковые волны. Несмотря на это, в этом случае получается и третий ответный сигнал, который ошибочно может быть интерпретирован как уровень свободной поверхности жидкости. Этот третий ответный сигнал получается в результате многократного отражения ультразвуковой волны внутри резервуара. Оказалось, что особо сильный ответный сигнал производится ультразвуковой волной, которая сначала отражается на уровне жидкости, затем на дне резервуара и после этого снова на уровне жидкости, прежде чем она попадает обратно на ультразвуковой датчик уровня наполнения. При этом ультразвуковая волна третьего ответного сигнала проходит путь от ультразвукового датчика уровня наполнения к уровню жидкости ровно четыре раза вместо ровно двух раз. В результате этого получается ровно двойное время прохождения времени прохождения второго ответного сигнала (от второй эталонной поверхности). Интервал времени определен так, что он распознает времена прохождения к уровню жидкости или же третьи ответные сигналы, которые соответствуют двойному времени прохождения до второй эталонной поверхности. Интервал времени, предпочтительно, покрывает указанное двойное время прохождения с допуском от 5% до 10%, так что заодно охватываются и неточности измерения. Если бы уровень наполнения рассчитывался на основе второй скорости распространения, и одновременно третий ответный сигнал ошибочно интерпретировался бы как время прохождения до уровня свободной поверхности жидкости, шаг д) дал бы рассчитанный уровень наполнения, который соответствовал бы двойному фактическому уровню наполнения в резервуаре. Для уверенного предотвращения этого ошибочного результата способа в соответствующих случаях используется третий критерий выбора.
Третий критерий выбора применяется только при переходе с первой скорости распространения ко второй скорости распространения. Таким образом, третий критерий выбора также может быть назван дополнительным контрольным критерием.
Кроме того, способ является благоприятным, если при расчете уровня наполнения на шаге д) применяются следующие подшаги:
i) расчет уровня наполнения на основе выбранной скорости распространения,
ii) проверка, соответствует ли определенный с помощью второй скорости распространения уровень наполнения двойной высоте второй эталонной поверхности.
iii) определение флюктуации второго ответного сигнала второй эталонной поверхности на ультразвуковом датчике уровня наполнения в интервале времени,
iv) проверка, превышает ли флюктуация второго ответного сигнала заданную предельную величину, и
v) корректировка рассчитанного на шаге i) уровня наполнения до высоты второй эталонной поверхности (2), если выполнены шаги ii) и iv).
Используемый на шаге iii) второй ответный сигнал на ультразвуковом датчике уровня наполнения, предпочтительно, должен быть соотнесен со второй эталонной поверхностью, в то время как первый ответный сигнал должен быть соотнесен с первой эталонной поверхностью, а третий ответный сигнал должен быть соотнесен с уровнем жидкости в резервуаре.
Как уже было пояснено выше, третий ответный сигнал при определенных условиях соответствует двойному отражению ультразвуковых волн на уровне жидкости, если уровень свободной поверхности жидкости или же уровень наполнения находится на высоте второй эталонной поверхности. Возможность, что эта ситуация существует, идентифицируется на подшаге ii). Однако на основе подшага ii) эта ситуация не может быть отличена от того, что уровень наполнения фактически находится на двойной высоте второй эталонной поверхности. Это становится возможным посредством подшагов iii) и iv). Флюктуации второго ответного сигнала на подшаге iii) инициируются вибрациями и/или колебательными движениями жидкости в резервуаре, если уровень наполнения находится на высоте второй эталонной поверхности. Это объясняется тем, что вторая эталонная поверхность при колебательных движениях тогда, по меньшей мере, кратковременно находится выше уровня свободной поверхности жидкости, а уровень свободной поверхности жидкости при этом порождает второй ответный сигнал. Этого не может происходить, если уровень наполнения соответствует двойной высоте второй эталонной поверхности. Тогда вторая эталонная поверхность всегда и надежно полностью покрыта жидкостью, а второй ответный сигнал соответственно является постоянным. Таким образом, посредством наблюдения флюктуации второго ответного сигнала в интервале времени и путем сравнения наблюдаемой (и при определенных условиях усредненной по времени) флюктуации можно различать, на самом ли деле уровень наполнения соответствует двойной высоте второй эталонной поверхности или происходит двойное отражение ультразвуковой волны на верхней поверхности жидкости (подшаги iii) и iv)).
Кроме того, способ является благоприятным, если на шаге г) происходит переход от первой скорости распространения ко второй скорости распространения только, если присутствует стационарный режим.
Стационарный режим отличается тем, что транспортное средство, в котором осуществляется способ (периодически), было деактивировано или является деактивированным. Противоположностью стационарного режима является динамический режим, в котором транспортное средство (непрерывно) было активировано или же является активированным. Различение между стационарным режимом и динамическим режимом может происходить в проверке режима. Если присутствует стационарный режим, является возможным, что резервуар был повторно дополнен, так как пополнение резервуара регулярно требует, чтобы транспортное средство (по меньшей мере, кратковременно) было деактивировано или же простаивало. Таким образом, если присутствует стационарный режим, является (принципиально) возможным, что уровень свободной поверхности жидкости в резервуаре повысился. В соответствии с этим, переход обратно ко второй скорости распространения (предпочтительно) является возможным только тогда, если имеется или, по меньшей мере, имелся стационарный режим. В динамическом режиме во время эксплуатации транспортного средства нужно исходить из того, что повышение уровня свободной поверхности жидкости до величины выше второй эталонной поверхности было вызвано колебанием жидкости в резервуаре, в результате перекоса резервуара или тому подобного. В соответствии с этим, тогда переход обратно ко второй скорости распространения является нерациональным.
Различение между статическим режимом и динамическим режимом является рациональным, прежде всего, в связи с подшагами i) - v) шага д). Флюктуации, которые могут быть оценены в рамках подшагов iii) и iv), возникают, как правило, только в динамическом режиме, так как в статическом режиме не возникает достаточных колебательных движений и/или вибраций уровня свободной поверхности жидкости, которые необходимы для различения уровней наполнения на высоте второй эталонной поверхности и на двойной высоте второй эталонной поверхности. Поэтому подшаги i) - v) могут быть так применены только в динамическом режиме и должны быть адаптированы для статического режима. Тогда, при определенных условиях, в статическом режиме необходимо прибегать к сохраненной в памяти информации об уровне наполнения.
Кроме того, способ является благоприятным, если входной сигнал используемого на шаге г) по меньшей мере одного критерия выбора фильтруется с помощью фильтра нижних частот.
Входной сигнал по меньшей мере одного критерия выбора является, например, рассчитанным на шаге д) уровнем наполнения при первом критерии выбора и при третьем критерии выбора или отклонением скорости при втором критерии выбора. Подлежащий фильтрации входной сигнал также может быть, например, временем прохождения ультразвуковой волны. Фильтр нижних частот имеет такие свойства, что отфильтровываются краткосрочные колеблющиеся изменения критерия выбора. За счет фильтра нижних частот может быть, например, предотвращено, что колебательные движения жидкости в резервуаре будут влиять по меньшей мере на один критерий выбора.
Кроме того, способ является благоприятным, если входной сигнал используемого на шаге г) по меньшей мере одного критерия выбора фильтруется с помощью гистерезиса.
Посредством фильтрации входного сигнала с помощью гистерезиса могут эффективно предотвращаться быстрые смены выбранной скорости распространения.
Здесь также должен быть описано транспортное средство с резервуаром для рабочей жидкости, имеющим ультразвуковой датчик уровня наполнения для определения уровня наполнения в резервуаре и по меньшей мере две эталонные поверхности для отражения ультразвуковой волны, которая испускается ультразвуковым датчиком уровня наполнения, причем первая эталонная поверхность расположена под второй эталонной поверхностью, и по меньшей мере с одним блоком управления, который для определения уровня наполнения выполнен для осуществления описанного способа.
Изложенные в связи с описанным способом особые преимущества и признаки осуществления аналогичным образом являются переносимыми на транспортное средство и ультразвуковой датчик уровня наполнения (в качестве устройства).
Блок управления может быть приданным ультразвуковому датчику уровня наполнения блоком управления в устройстве для транспортировки и подачи жидкой добавки. Блок управления также может быть компонентом блока управления транспортного средства, в котором для осуществления описанного способа заложено программное обеспечение.
Далее изобретение и технический контекст поясняются более детально на фигурах. Фигуры показывают особо предпочтительные примеры осуществления, которыми изобретение, однако, не ограничено. Прежде всего, следует указать на то, что фигуры и представленные на фигурах размерные отношения являются лишь схематическими. Показано на:
Фиг. 1: резервуар с описанным ультразвуковым датчиком уровня наполнения,
Фиг. 2: деталь для обеспечения эталонных поверхностей,
Фиг. 3: расположение детали с эталонными поверхностями на ультразвуковом датчике уровня наполнения,
Фиг. 4: диаграмма испускаемых ультразвуковым датчиком уровня наполнения ультразвуковых волн и их отражений,
Фиг. 5: блок-схема описанного способа,
Фиг. 6: логическая схема описанного способа,
Фиг. 7: первый критерий выбора,
Фиг. 8: второй критерий выбора,
Фиг. 9: третий критерий выбора
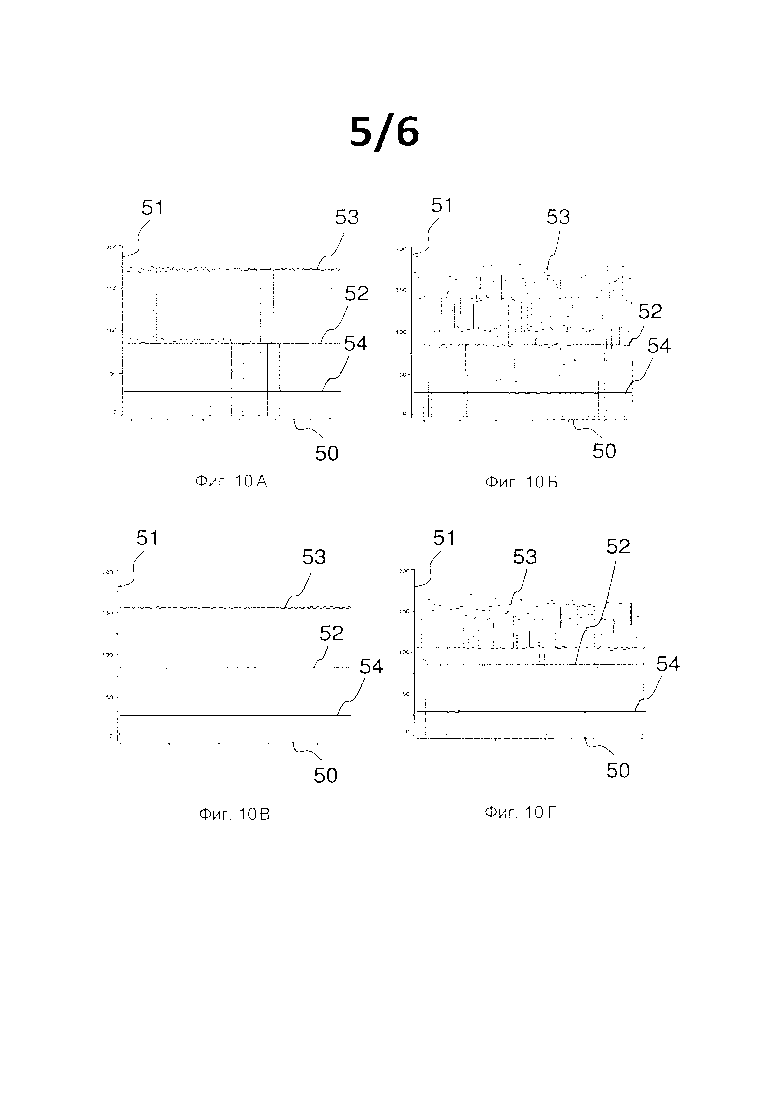
Фиг. 10А - фиг.10Г: диаграммы ответных сигналов на ультразвуковом датчике уровня наполнения при различных условиях, и
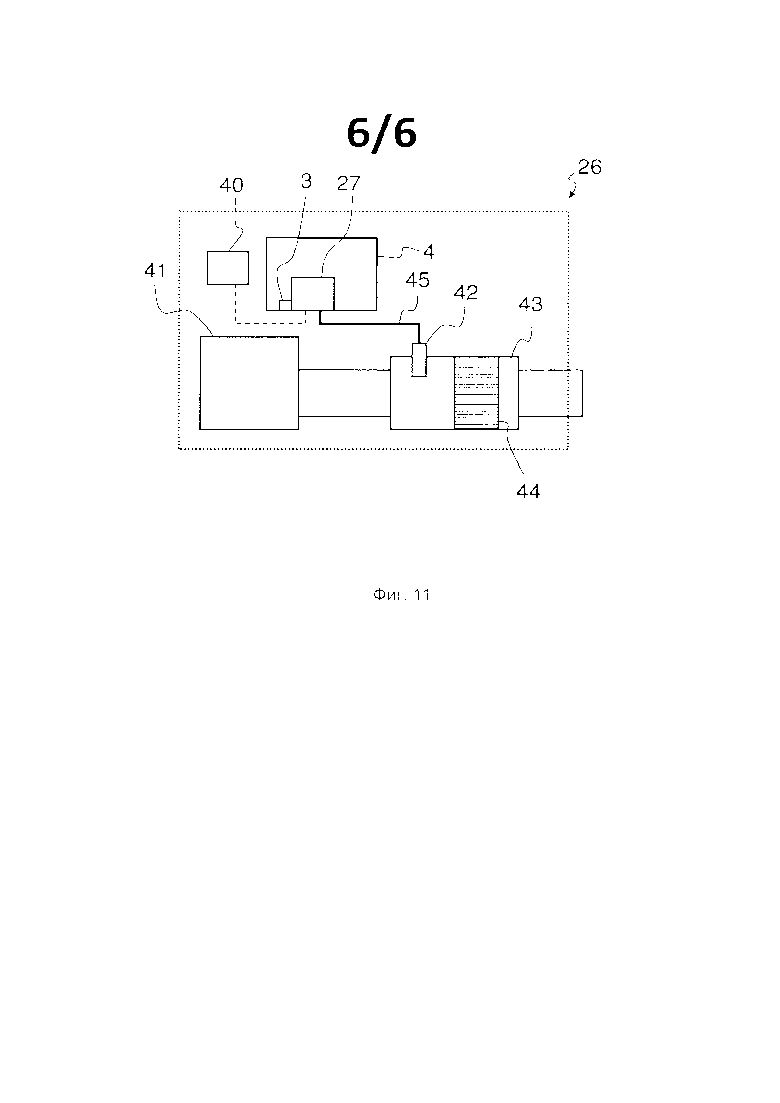
Фиг. 11: транспортное средство, имеющее резервуар и ультразвуковой датчик уровня наполнения, который может эксплуатироваться по описанному способу.
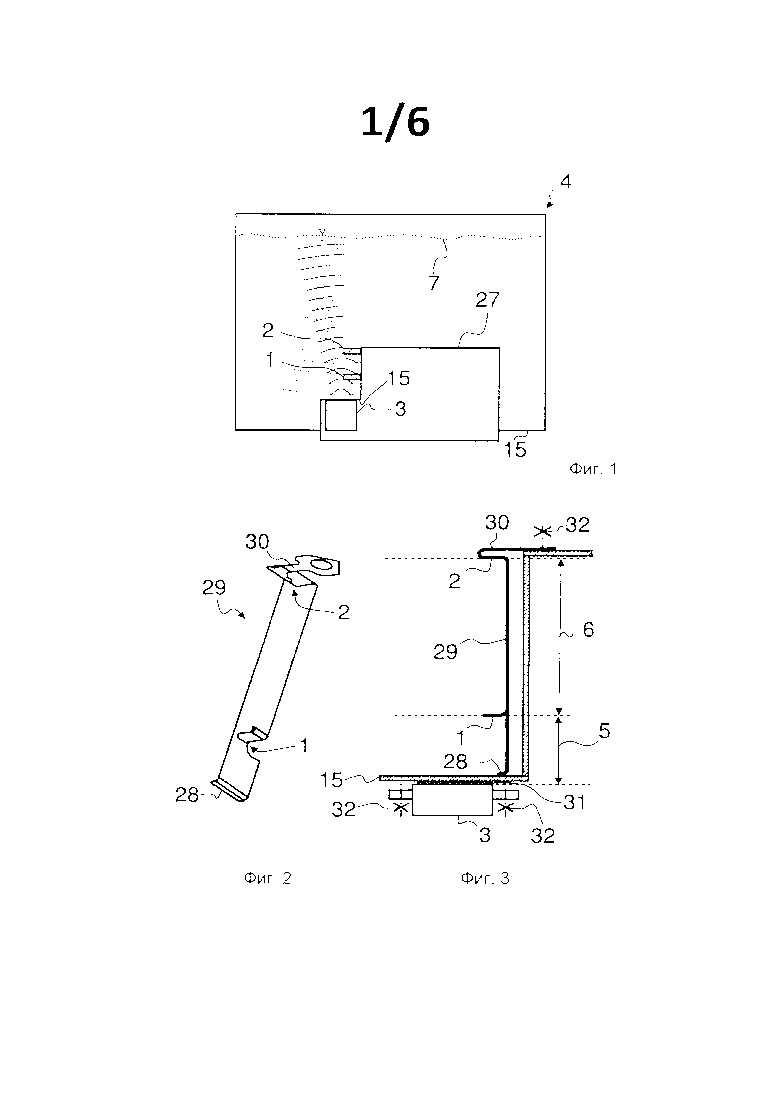
Фиг. 1 показывает резервуар 4, причем в области дна резервуара резервуара в стенку 15 резервуара резервуара 4 встроено отборное устройство 27. С помощью отборного устройства 27 жидкость может извлекаться из резервуара 4 и подаваться, например, на (здесь не показанное) устройство для обработки ОГ.
Корпус отборного устройства 27, по меньшей мере, участками образует стенку 15 резервуара. В отборном устройстве 27 расположен ультразвуковой датчик 3 уровня наполнения. Над ультразвуковым датчиком 3 уровня наполнения находятся первая эталонная поверхность 1 и вторая эталонная поверхность 2. Жидкость в резервуаре образует уровень 7 жидкости, до которого жидкость в резервуаре 4 простирается (вверх).
Фиг. 2 показывает калибровочную деталь 29, которая для обеспечения первой эталонной поверхности 1 и второй эталонной поверхности 2 может быть интегрирована в резервуар. Калибровочная деталь 29 состоит, предпочтительно, из металла и поэтому может быть изготовлена при точном соблюдении допусков на расстояния и положения первой эталонной поверхности 1 и второй эталонной поверхности 2. Калибровочная деталь 29, предпочтительно, имеет поверхность 28 прилегания, которая поблизости от ультразвукового датчика уровня наполнения может прилегать (к стенке 15 резервуара) и тем самым задает точное позиционирование калибровочной детали 29. Предпочтительно, кроме того, калибровочная деталь имеет пружинный участок 30, который обеспечивает то, что калибровочная деталь 29 поверхностью 28 прилегания точно в заданном положении прилегает к стенке 15 резервуара. За счет этого точно заданы положение и ориентация первой эталонной поверхности 1 и второй эталонной поверхности 2 относительно ультразвукового датчика 3 уровня наполнения.
На фиг. 3 видно, как калибровочная деталь 29 может быть расположена на стенке 15 резервуара резервуара 4. Калибровочная деталь 29 закреплена на стенке 15 резервуара, предпочтительно, по меньшей мере одним винтом 32. Посредством пружинного участка 30 поверхность 28 прилегания калибровочной детали 29 прочно прижимается к заданному месту стенки 15 резервуара. Противоположно калибровочной детали 29 на стенке 15 резервуара расположен ультразвуковой датчик 3 уровня наполнения и здесь, в качестве примера, также закреплен по меньшей мере одним винтом 32. Посредством позиционирования ультразвукового датчика 3 уровня наполнения и калибровочной детали 29 определяется первый измерительный участок 5 от ультразвукового датчика уровня наполнения до первой эталонной поверхности и второй измерительный участок 6 от второй эталонной поверхности 2 до первой эталонной поверхности 1.
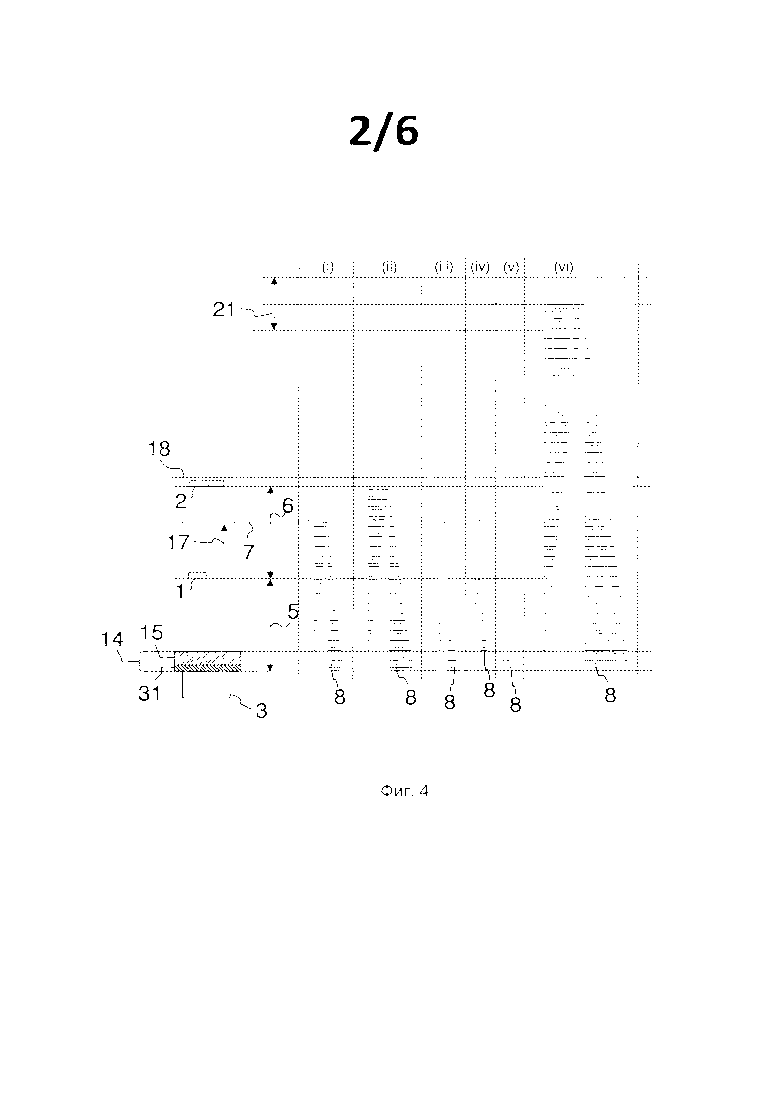
Фиг. 4 показывает разные времена 8 прохождения ультразвуковых волн или же ответных сигналов, которые испускаются ультразвуковым датчиком уровня наполнения и отражаются структурами в резервуаре (например, первой эталонной поверхностью 1 или второй эталонной поверхностью 2). Для лучшего понимания фиг. 4 показывает частично структурные признаки (например, ультразвуковой датчик 3 уровня наполнения) и частично выполнена по типу диаграммы. Фиг. 4 показывает внизу слева ультразвуковой датчик 3 уровня наполнения. Кроме того, на фиг. 4 видны стенка 15 резервуара, первая эталонная поверхность 1, вторая эталонная поверхность 2 и рабочее тело 31, которое переносит ультразвуковые волны от ультразвукового датчика 3 уровня наполнения на стенку 15 резервуара. Рабочим телом 31 может быть, например, передаточная паста или передаточная подкладка, которая вместе со стенкой 15 резервуара образует стыковочный слой 14, через который ультразвуковые волны от ультразвукового датчика 3 уровня наполнения вводятся в не показанный здесь резервуар. От ультразвукового датчика 3 уровня наполнения до первой эталонной поверхности 1 задан первый измерительный участок 5. От первой эталонной поверхности 1 до второй эталонной поверхности 2 задан второй измерительный участок 6. Кроме того, на фиг. 4 еще показаны уровень 7 жидкости в здесь не показанном резервуаре и получающийся из этого уровень 17 наполнения в резервуаре. С помощью (i) обозначено время 8 прохождения ультразвуковой волны от ультразвукового датчика 3 уровня наполнения до уровня 7 жидкости и обратно к ультразвуковому датчику 3 уровня наполнения, (ii) показывает время 8 прохождения, которое получается на основе отражения ультразвуковых волн на второй эталонной поверхности 2. (iii) показывает время 8 прохождения, которое получается из первой эталонной поверхности 1. Обозначенное с помощью (iii) время 8 прохождения может быть подразделено на время (iv) прохождения и время (v) прохождения. Эти оба времена 8 прохождения вместе дают время 8 прохождения согласно (iii). При этом (v) обозначает время 8 прохождения через стыковочный слой 14, a (iv) время 8 прохождения через жидкость от стенки 15 резервуара до первой эталонной поверхности 1. С помощью (vi) обозначено (фиктивное) время 8 прохождения от ультразвукового датчика 3 уровня наполнения до (фиктивного) уровня свободной поверхности жидкости, который находится на двойной высоте высоты второй эталонной поверхности 2. Обозначенное с помощью (vi) время 8 прохождения обычно получается не в результате уровня свободной поверхности жидкости на этой высоте, а в результате двойного отражения ультразвуковых волн на уровне жидкости и на дне резервуара. Таким образом, (vi) иллюстрирует фиктивное, фактически не имеющееся состояние, которое определяется при ложной интерпретации принимаемых ультразвуковым датчиком уровня наполнения ответных сигналов. В области обозначенного с помощью (vi) времени 8 прохождения определен интервал 21 времени, причем времена 8 прохождения, которые находятся в области этого интервала 21 времени, учитываются в рамках третьего критерия выбора, чтобы решить, должен ли произойти переход обратно ко второй скорости распространения.
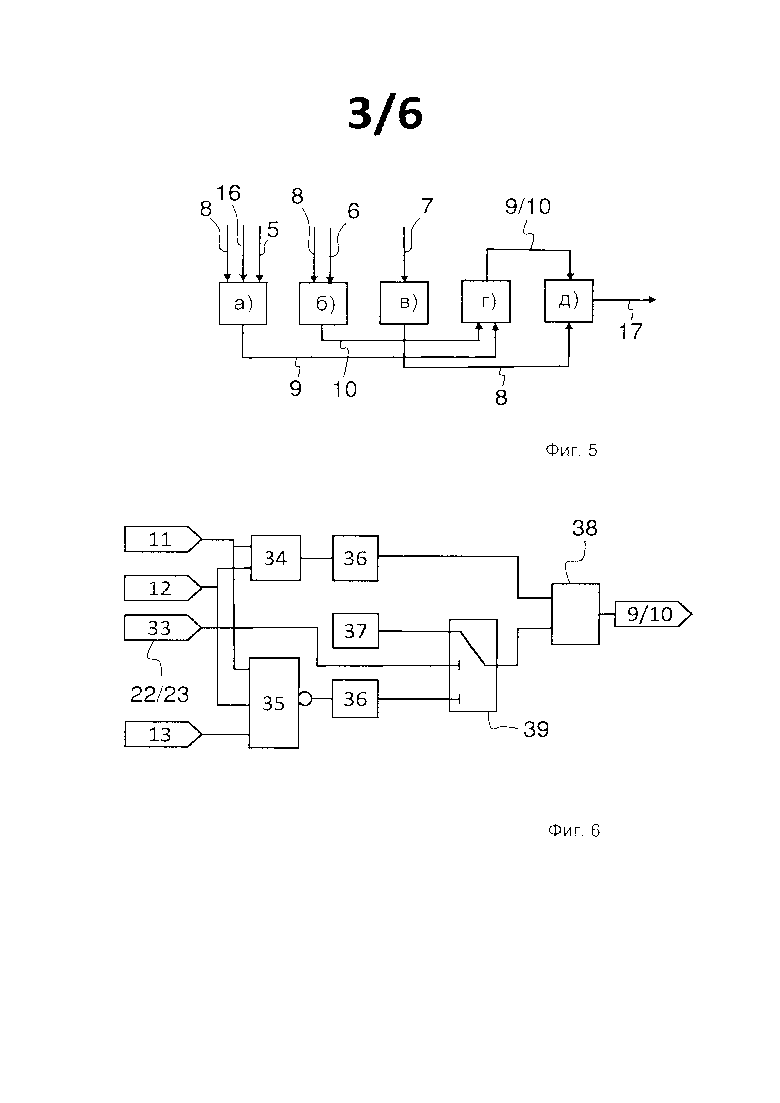
Фиг. 5 показывает блок-схему описанного способа. Видны шаги а), б), с), г) и д) способа. На шаге а) способа для определения первой скорости распространения учитываются время 8 прохождения до первой эталонной поверхности, описанный корректировочный фактор 16 для стыковочного слоя и первый измерительный участок 5. Само собой разумеется, здесь могут быть учтены и другие параметры и/или сигналы. На шаге б) для определения второй скорости 10 распространения учитываются соответствующее время 8 прохождения и второй измерительный участок 6. Также и здесь возможен учет дополнительных параметров. На шаге в) определяется ассоциируемое с уровнем 7 жидкости время 8 прохождения. На шаге (г) происходит выбор первой скорости 9 распространения или второй скорости 10 распространения. Выбранная скорость 9/10 распространения вместе со временем 8 прохождения до уровня 7 жидкости используется на шаге д) для расчета уровня наполнения.
Фиг. 6 показывает логическую коммутационную диаграмму, которая поясняет связь отдельных критериев 11, 12 и 13 выбора для выбора первой скорости 9 распространения или второй скорости 10 распространения. Выбор скорости 9, 10 распространения происходит в модуле 38 выбора. Для выбора первой скорости 9 распространения требуется, чтобы, как первый критерий 11 выбора, так и второй критерий 12 выбора показывали соответствующий выбор. Для этого оба эти критерии 11,12 выбора соединяются друг с другом в первом комбинаторе 34 критериев «И»- связью. Выход первого комбинатора 34 критериев еще фильтруется с помощью интегратора 36. Интегратором 36 обеспечивается то, что первый комбинатор 34 критериев на заданный минимальный интервал времени задает переход к первой скорости 9 распространения, прежде чем модулю 38 выбора делается соответствующая задача. Для выбора второй скорости 10 распространения требуется, чтобы первый критерий 11 выбора и второй критерий 12 выбора, а также дополнительный третий критерий 13 выбора задали выбор второй скорости 10 распространения. Для этого три критерия 11, 12, 13 выбора во втором комбинаторе 35 критериев выполняются по типу НЕ И -связи. НЕ И -связь означает, что никакой из трех критериев 11, 12, 13 выбора не имеет права задавать выбор первой скорости 9 распространения, чтобы была выбрана вторая скорость 10 распространения. И выход второго комбинатора 35 критериев также фильтруется с помощью интегратора 36, чтобы обеспечить то, что выбор второй скорости 10 распространения задается, по меньшей мере, на минимальный интервал времени. Выход второго комбинатора 35 критериев дополнительно проходит через коммутационный модуль 39, прежде чем он доходит до модуля 38 выбора. Посредством коммутационного модуля 39 выбор второй скорости 10 распространения может быть предотвращен, если проверка 33 режима констатирует динамический режим 23. Коммутационный модуль 39 освобождает выбор второй скорости 10 распространения только, если присутствует стационарный режим 22. В противном случае соответствующий вход модуля 38 выбора соединяется с деактивацией 37.
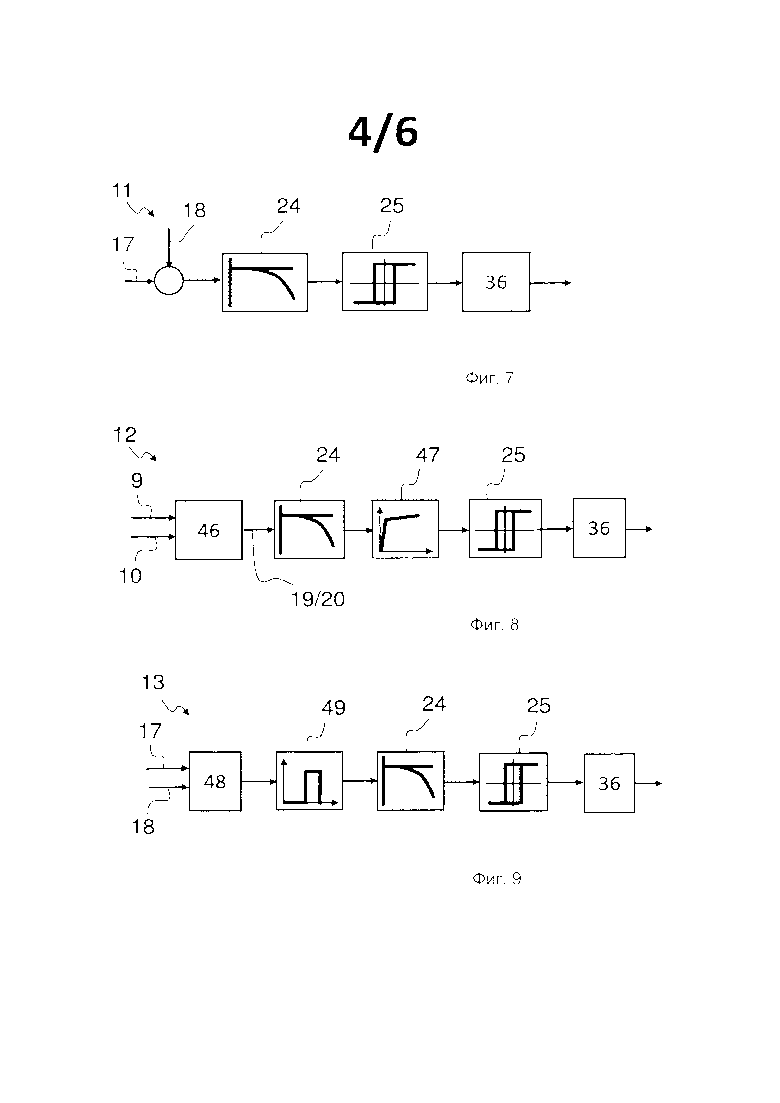
Фиг. 7 показывает блок-схему первого критерия 11 выбора. Видно, что уровень 17 наполнения используется в качестве входного сигнала. Уровень 17 наполнения фильтруется с помощью фильтра 24 низких частот и гистерезиса 25, а затем обрабатывается с помощью интегратора 36. Посредством интегратора 36 может быть обеспечено то, что для заданного промежутка времени должен быть выполнен первый критерий выбора, чтобы реализовать переключение на шаге г) между скоростями распространения. Затем фильтрованный входной сигнал для уровня наполнения сравнивается с предельной величиной уровня наполнения.
На фиг. 8 показан второй критерий 12 выбора. Здесь первая скорость 9 распространения и вторая скорость 10 распространения сравниваются в компараторе 46 скоростей. Получающийся из этого сигнал сначала фильтруется фильтром 24 низких частот. Затем к сигналу применяется логика 47 нечеткости. Посредством логики 47 нечеткости усиливаются малые, постоянно возникающие отклонения между скоростями. Таим образом, логика 47 нечеткости улучшает распознание отклонений скорости, которые вызваны понижением уровня свободной поверхности жидкости. После логики 47 нечеткости к сигналу применяется гистерезис 25. Затем еще происходит применение интегратора 36, чтобы зарегистрировать только происходящие в течение более длительных промежутков времени отклонения между первой скоростью 9 распространения и второй скоростью 10 распространения.
Фиг. 9 показывает третий критерий выбора описанного способа. В этот критерий выбора входит уровень 17 наполнения. Этот уровень 17 наполнения сначала в компараторе 48 уровней наполнения сравнивается с соответствующим второй эталонной поверхности уровнем наполнения. Затем применяется цифровая функция 49 отображения, с помощью которой можно определить, соответствует ли уровень наполнения двойной высоте второй эталонной поверхности. К выходному сигналу цифровой функции 49 отображения применяются фильтр 24 низких частот и гистерезис 25, а также интегратор 36.
Фиг. 10А - 10Г служат для пояснения проблематики, которая возникает, если уровень наполнения в резервуаре точно соответствует высоте второй эталонной поверхности или двойной высоте второй эталонной поверхности. Оба эти уровни наполнения при определенных условиях не могут различаться ультразвуковым датчиком уровня наполнения. Но посредством определенного анализа ответных сигналов на ультразвуковом датчике уровня наполнения является возможным различать оба уровня наполнения. Фиг. 10А - 10Б показывают в каждом случае по оси 50 времени на оси 51 сигнала первый ответный сигнал 54, второй ответный сигнал 52 и третий ответный сигнал 53. Выше уже было пояснено, что первый ответный сигнал 54 обычно должен быть ассоциирован с первой эталонной поверхностью, в то время как второй ответный сигнал 52 ассоциируется со второй эталонной поверхностью, а третий ответный сигнал 53 ассоциируется с поверхностью жидкости в резервуаре, причем уровень свободной поверхности жидкости соответствует уровню наполнения.
Фиг. 10А и фиг. 10Б соответственно показывают ответные сигналы 54, 52, 53, которые получаются, если уровень наполнения находится точно на высоте второй эталонной поверхности. Фиг. 10А показывает статические условия (выше также называемые статическим режимом), которые получаются, если транспортное средство стоит абсолютно неподвижно, и в резервуаре не возникают вибрации и/или колебательные движения жидкости. Фиг. 10Б показывает динамические условия (выше также называемые динамическим режимом), которые получаются, если транспортное средство движется, и в резервуаре возникают вибрации и/или колебательные движения. Видно, что первый ответный сигнал 54 к первой эталонной поверхности, как на фиг. 10А при статических условиях, так и на фиг. 10Б при динамических условиях является постоянным и также при динамических условиях, если вообще, имеет лишь минимальные колебания. Это объясняется тем, что первая эталонная поверхность независимо от динамического режима всегда находится под уровнем наполнения. Однако второй ответный сигнал 52 и третий ответный сигнал 53 отличаются между динамическим режимом или статическим режимом. В статическом режиме (фиг. 10А) второй ответный сигнал 52 является по существу постоянным, а третий ответный сигнал 53 имеет немногочисленные кратковременные отклонения. Выше уже было пояснено, что третий ответный сигнал 53 получается в результате двойного отражения ультразвуковых волн на уровне жидкости и на дне резервуара, если уровень наполнения соответствует высоте второй эталонной поверхности. Уже при минимальных вибрациях и/или колебательных движениях в резервуаре уровень свободной поверхности жидкости кратковременно находится также над второй эталонной поверхностью. Тогда однократное отражение ультразвуковых волн на уровне жидкости интерпретируется как третий ответный сигнал 53, и третий ответный сигнал 53 кратковременно отпадает. Но в стационарном режиме этот эффект возникает ненадежно, так как нельзя исходить из того, что минимальные вибрации и/или колебательные движения возникают надежно и равномерно. В динамическом режиме (фиг. 10Б) регулярно возникают вибрации и/или колебательные движения. В результате этого уровень свободной поверхности жидкости находится, как правило, над и под второй эталонной поверхностью. Это имеет тот эффект, что, как второй ответный сигнал 52, так и третий ответный сигнал 53 подвержены сильным флюктуациям.
Фиг. 10В и фиг. 10Г соответственно показывают ответные сигналы 54, 52, 53, которые получаются, если уровень наполнения находится точно на двойной высоте второй эталонной поверхности. При этом фиг. 10В в соответствии с фиг. 10А показывает статические условия, в то время как фиг. 10Г в соответствии с 10Б представляет динамические условия. Видно, что, как при статических условиях, так и при динамических условиях не возникает колебаний второго ответного сигнала 52. Это объясняется тем, что вторая эталонная поверхность всегда и независимо от вибраций и колебательных движений находится под уровнем наполнения. При динамических условиях (фиг. 10Г) возникают регулярные колебания третьего ответного сигнала (53).
В этом отношении посредством временной оценки второго ответного сигнала можно различать, соответствует ли уровень наполнения двойной высоте второй эталонной поверхности, или соответствует ли уровень наполнения высоте второй эталонной поверхности. Если при временной оценке второго ответного сигнал 52 наблюдаются флюктуации второго ответного сигнала, уровень наполнения соответствует высоте второй эталонной поверхности, а третий ответный сигнал 53 не может оцениваться как информация об уровне наполнения. Если при временной оценке не наблюдаются флюктуации второго ответного сигнала 52, третий ответный сигнал 53 соответствует фактическому уровню наполнения, и он может быть соответственно оценен.
Фиг. 11 показывает транспортное средство 26, имеющее двигатель 41 внутреннего сгорания и устройство 43 для обработки ОГ для очистки ОГ двигателя 41 внутреннего сгорания. В устройстве 43 для обработки ОГ расположен катализатор 44 СКВ, с помощью которого ОГ двигателя 41 внутреннего сгорания могут очищаться способом селективного каталитического восстановления. Для этого в устройство 43 для обработки ОГ через инжектор 42 является подводимой жидкая добавка для очистки ОГ. Жидкая добавка для очистки ОГ по трубопроводу 45 отборным устройством 27 подается из резервуара 4. Отборное устройство 27 имеет ультразвуковой датчик 3 уровня наполнения, который выполнен для осуществления описанного способа. Соответствующий способ заложен в блоке 40 управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ | 2018 |
|
RU2692409C1 |
| ПОДАЮЩЕЕ УСТРОЙСТВО С ДАТЧИКОМ УРОВНЯ НАПОЛНЕНИЯ ДЛЯ ЖИДКОЙ ДОБАВКИ | 2013 |
|
RU2586228C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ИЗМЕРЕНИЯ УРОВНЯ С ФУНКЦИЕЙ МОНИТОРИНГА ЭКСПЛУАТАЦИИ | 2011 |
|
RU2602417C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НЕИНВАЗИВНОГО ОПРЕДЕЛЕНИЯ И/ИЛИ КОНТРОЛЯ ВНУТРИЧЕРЕПНОЙ ПОДАТЛИВОСТИ | 2020 |
|
RU2815286C2 |
| ДАТЧИК МУТНОСТИ | 2009 |
|
RU2477345C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ И ПЛОТНОСТИ | 2001 |
|
RU2188400C1 |
| РАДАРНОЕ ИЗМЕРЕНИЕ УРОВНЯ С ОПРЕДЕЛЕНИЕМ ПЕРЕМЕЩЕНИЯ ПОВЕРХНОСТИ | 2011 |
|
RU2582894C2 |
| ЕМКОСТЬ ДЛЯ МОЧЕВИНЫ С УЛЬТРАЗВУКОВЫМ ДАТЧИКОМ | 2011 |
|
RU2559321C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И АНАЛИЗА ОТЛОЖЕНИЙ | 2012 |
|
RU2607078C2 |
| СПОСОБ КОНТРОЛЯ ЗА ДИНАМИКОЙ ИЗМЕНЕНИЯ ТОЛЩИНЫ СТЕНКИ КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2013 |
|
RU2540942C1 |
Изобретение относится к способу определения уровня (17) наполнения в резервуаре (4) для жидкости, имеющем ультразвуковой датчик (3) уровня наполнения и по меньшей мере две эталонные поверхности (1, 2) для отражения ультразвуковой волны, которая испускается ультразвуковым датчиком (3) уровня наполнения, причем первая эталонная поверхность (1) расположена под второй эталонной поверхностью (2). На шаге а) способа определяют первую скорость (9) распространения ультразвуковой волны в жидкости на первом измерительном участке (5) от ультразвукового датчика уровня наполнения до первой эталонной поверхности (1). На шаге б) способа определяют вторую скорость (10) распространения ультразвуковой волны в жидкости на втором измерительном участке (6) от первой эталонной поверхности (1) до второй эталонной поверхности (2). На шаге в) измеряют время (8) прохождения ультразвуковой волны от ультразвукового датчика (3) уровня наполнения до уровня свободной поверхности (7) жидкости в резервуаре (4). На шаге г) выбирают первую скорость (9) распространения или второй скорости (10) распространения в зависимости по меньшей мере от одного критерия (11, 12, 13) выбора. Затем на шаге д) рассчитывают уровень (17) наполнения с помощью измеренного на шаге в) времени (8) прохождения и выбранной на шаге г) скорости (9, 10) распространения. 2 н. и 9 з.п. ф-лы, 14 ил.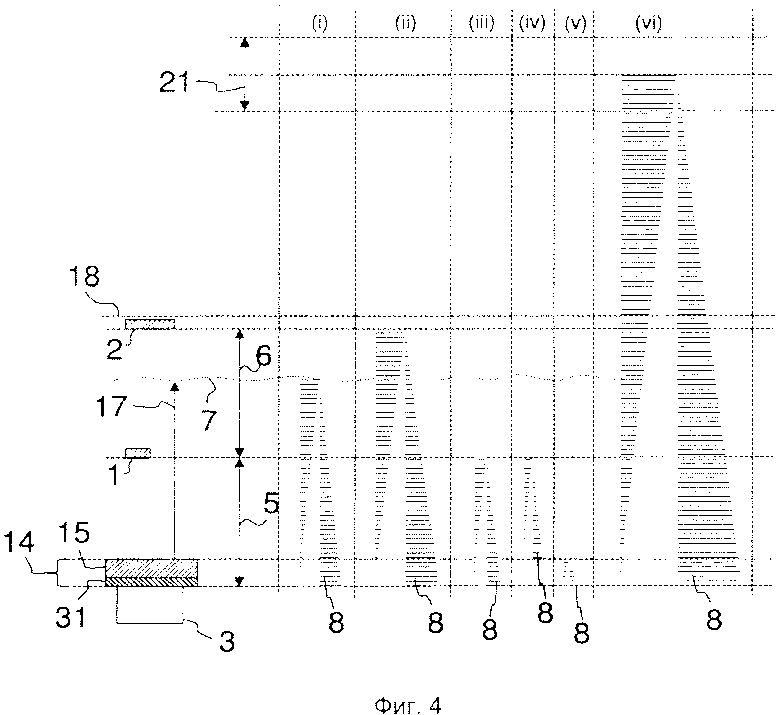
1. Способ определения уровня (17) наполнения в резервуаре (4) для жидкости, имеющем ультразвуковой датчик (3) уровня наполнения и по меньшей мере две эталонные поверхности (1, 2) для отражения ультразвуковой волны, которая испускается ультразвуковым датчиком (3) уровня наполнения, причем первая эталонная поверхность (1) расположена под второй эталонной поверхностью (2), имеющий следующие шаги:
а) определение первой скорости (9) распространения ультразвуковой волны в жидкости на первом измерительном участке (5) от ультразвукового датчика уровня наполнения до первой эталонной поверхности (1),
б) определение второй скорости (10) распространения ультразвуковой волны в жидкости на втором измерительном участке (6) от первой эталонной поверхности (1) до второй эталонной поверхности (2),
в) измерение времени (8) прохождения ультразвуковой волны от ультразвукового датчика (3) уровня наполнения до уровня свободной поверхности (7) жидкости в резервуаре (4),
г) выбор первой скорости (9) распространения или второй скорости (10) распространения в зависимости по меньшей мере от одного критерия (11, 12, 13) выбора,
д) расчет уровня (17) наполнения с помощью измеренного на шаге в) времени (8) прохождения и выбранной на шаге г) скорости (9, 10) распространения.
2. Способ по п. 1, причем ультразвуковой датчик (3) уровня наполнения расположен вне резервуара (4), и ультразвуковая волна ультразвукового датчика (3) уровня наполнения проходит через стыковочный слой (14), прежде чем она входит в жидкость в резервуаре (4), причем стыковочный слой (14) содержит стенку (15) резервуара, и время (8) прохождения ультразвуковой волны в стыковочном слое (14) на шаге а) учитывают с корректировочным фактором (16).
3. Способ по одному из предшествующих пунктов, причем способ итеративно повторяют, и при выборе скорости (9, 10) распространения на шаге г) учитывают, какая скорость (9, 10) распространения была выбрана при предшествующей итерации способа.
4. Способ по одному из предшествующих пунктов, причем в качестве первого критерия (11) выбора на шаге д) используют рассчитанный уровень (17) наполнения, причем при уровне (17) наполнения ниже предельной величины (18) уровня наполнения выбирают первую скорость (9) распространения, а при уровне (17) наполнения выше предельной величины (18) уровня наполнения выбирают вторую скорость (10) распространения.
5. Способ по одному из пп. 1-3, причем в качестве второго критерия (12) выбора на шаге г) проводят сравнение между первой скоростью (9) распространения и второй скоростью (10) распространения, причем первую скорость (9) распространения выбирают, если отклонение (19) скорости между первой скоростью (9) распространения и второй скоростью (10) распространения (10) превышает предельную величину (20).
6. Способ по одному из предшествующих пунктов, причем в качестве третьего критерия (13) выбора на шаге г) проверяют измеренное на шаге в) время (8) прохождения, причем вторую скорость (10) распространения не выбирают, если измеренное время (8) прохождения находится вне интервала (21) времени, который соответствует двойному времени (8) прохождения до второй эталонной поверхности (2), и при предшествующей итерации способа была выбрана первая скорость (9) распространения.
7. Способ по одному из предшествующих пунктов, причем при расчете уровня (17) наполнения на шаге д) применяют следующие подшаги:
i) расчет уровня (17) наполнения на основе выбранной скорости (9, 10) распространения,
ii) проверка, соответствует ли определенный со второй скоростью (10) распространения уровень (17) наполнения двойной высоте второй эталонной поверхности (2),
iii) определение флюктуации второго ответного сигнала (52) второй эталонной поверхности (2) на ультразвуковом датчике (3) уровня наполнения в интервале времени,
iv) проверка, превышает ли флюктуация второго ответного сигнала (52) заданную предельную величину, и
v) корректировка рассчитанного на шаге i) уровня (17) наполнения на высоту второй эталонной поверхности (2), если выполнены шаги ii) и iv).
8. Способ по одному из предшествующих пунктов, причем на шаге г) переход от первой скорости (9) распространения ко второй скорости (10) распространения происходит только в том случае, если присутствует стационарный режим (22).
9. Способ по одному из предшествующих пунктов, причем входной сигнал примененного на шаге г) по меньшей мере одного критерия (11, 12, 13) выбора фильтруют с помощью фильтра (24) низких частот.
10. Способ по одному из предшествующих пунктов, причем входной сигнал примененного на шаге г) по меньшей мере одного критерия (11, 12, 13) выбора фильтруют с помощью гистерезиса (25).
11. Транспортное средство (26) с резервуаром (4) для рабочей жидкости, имеющим ультразвуковой датчик (3) уровня наполнения для определения уровня (17) наполнения в резервуаре (4) и по меньшей мере две эталонные поверхности (1, 2) для отражения ультразвуковой волны, которая испускается ультразвуковым датчиком (3) уровня наполнения, причем первая эталонная поверхность (1) расположена под второй эталонной поверхностью (2), и по меньшей мере с одним блоком (40) управления, который выполнен для определения уровня наполнения для осуществления способа по одному из предшествующих пунктов.
| WO 2013135486 A, 19.09.2013; | |||
| БАК ДЛЯ ХРАНЕНИЯ ЗАПАСА ЖИДКОЙ АКТИВНОЙ ДОБАВКИ | 2009 |
|
RU2502612C2 |
| WO 2014090848 A1, 19.06.2014 | |||
| DE 102004028547 A1, 02.02.2006. | |||

