Изобретение относится к способу поддержки водителя грузового автопоезда, согласно ограничительной части пункта 1 формулы изобретения, к системе поддержки водителя грузового автопоезда, согласно ограничительной части пункта 12 формулы изобретения, а также к грузовому автомобилю для выполнения способа и/или содержащего систему поддержки водителя в соответствии с пунктом 15 формулы изобретения.
Современные грузовые автомобили имеют обычно ряд систем поддержки водителя, которые должны оказывать помощь водителю грузового автомобиля. При этом эти системы поддержки водителя часто выполнены так, что с их помощью водителю грузового автомобиля выдается полезная информация.
Из DE 102005042957 A1 известен способ определения статических и динамических характеристик автопоезда. Одной из статических характеристик является, например, ширина прицепа автопоезда, одной из динамических характеристик является, например, относительный угол рыскания между тягачом автопоезда и прицепом. Определение относительного угла рыскания обеспечивает, например, возможность оказания помощи водителю автопоезда при движении задним ходом или, при необходимости, для полной автоматизации движения задним ходом. Для определения относительного угла рыскания сначала с помощью расположенного на стороне тягача лазерного сканера определяются расстояния до измерительных точек на обращенной к тягачу передней стороне прицепа, и определяется положение проходящей через измерительные точки равновесной прямой. С помощью положения равновесной прямой и определенных геометрических расчетов можно затем определять относительный угол рыскания между тягачом и прицепом.
Задачей изобретения является создание способа и/или системы поддержки водителя для помощи водителю грузового автопоезда, с помощью которых можно простым образом определять по меньшей мере одну статическую и/или по меньшей мере одну динамическую характеристику грузового автопоезда.
Эта задача решена с помощью независимых пунктов формулы изобретения. Предпочтительные варианты изобретения раскрыты в зависимых пунктах формулы изобретения.
Изобретение относится к способу поддержки водителя грузового автопоезда, при этом тягач грузового автопоезда имеет оптическое измерительное устройство, в частности лазерный сканер, с помощью которого определяется положение по меньшей мере одной, отображаемой на передней, при рассматривании в продольном направлении транспортного средства, торцевой поверхности прицепа/полуприцепа измерительной прямой. Из положения измерительной прямой определяется по меньшей мере одна статическая и/или по меньшей мере одна динамическая характеристика грузового автопоезда. При этом наружный контур торцевой поверхности выполнен по существу в форме прямоугольника, или соответственно, прямоугольным.
Согласно изобретению, измерительная прямая ориентирована параллельно или конгруэнтно по меньшей мере одной проходящей в поперечном направлении транспортного средства поперечной кромке, в частности верхней кромке и/или нижней кромке, наружного контура торцевой поверхности, с целью определения ширины прицепа/полуприцепа и/или относительного угла рыскания между тягачом и прицепом/полуприцепом.
В качестве альтернативного решения и/или дополнительно, измерительная прямая ориентирована параллельно или конгруэнтно по меньшей мере одной проходящей в направлении высоты транспортного средства продольной кромке, в частности боковой кромке, наружного контура торцевой поверхности, с целью определения высоты прицепа/полуприцепа.
Кроме того, в качестве альтернативного решения и/или дополнительно, измерительная прямая ориентирована так, что она пересекает как поперечную кромку, так и продольную кромку наружного контура торцевой поверхности, с целью определения относительного угла рыскания между тягачом и прицепом/полуприцепом, и/или высоты прицепа/полуприцепа, и/или ширины прицепа/полуприцепа.
За счет специальной(ых) ориентации(ий) измерительной прямой можно особенно просто определять ширину прицепа/полуприцепа, высоту прицепа/полуприцепа и/или относительный угол рыскания между тягачом и прицепом/полуприцепом, поскольку вычисления для определения этих характеристик значительно упрощаются. Затем определяемые характеристики можно выдавать, например, водителю грузового автопоезда, с целью предоставления ему непрерывно информации об этих характеристиках.
При этом ориентация измерительной прямой так, что она пересекает как поперечную кромку, так и продольную кромку наружного контура торцевой поверхности, обеспечивает возможность комбинированного, соответственно, одновременного определения как ширины прицепа/полуприцепа, высоты прицепа/полуприцепа, так и относительного угла рыскания между тягачом и прицепом/полуприцепом с помощью лишь одной единственной измерительной прямой. Таким образом, эти характеристики можно определять особенно просто, в частности, с помощью лишь одного единственного измерительного устройства и без новой юстировки измерительного устройства во время измерения, а также особенно быстро.
Предпочтительно, пересекающая как поперечную кромку, так и продольную кромку измерительная прямая ориентирована так, что отображенная на передней торцевой поверхности прицепа/полуприцепа зона измерительной прямой является особенно длинной. За счет этого можно с особенно высокой точностью определять относительный угол рыскания между тягачом и прицепом/полуприцепом, и/или высоту прицепа/полуприцепа, и/или ширину прицепа/полуприцепа.
Если измерительная прямая ориентирована так, что она пересекает как поперечную кромку, так и продольную кромку наружного контура торцевой поверхности, то можно предпочтительно определять с помощью оптического измерительного устройства по меньшей мере с определенным отклонением положение по меньшей мере двух измерительных точек на измерительной прямой, в частности, положения точек пересечения между поперечной кромкой и измерительной прямой, а также между продольной кромкой и измерительной прямой. Из геометрического соотношения положений по меньшей мере двух измерительных точек и положения, соответственно, ориентации оптического измерительного устройства на тягаче, можно затем определять относительный угол рыскания между тягачом и прицепом/полуприцепом. А именно, при этом для определения относительного угла рыскания можно вычислять из данных о положении по меньшей мере двух измерительных точек, например, угол измерительной прямой относительно вертикальной плоскости, образованной поперечной осью тягача и продольной осью тягача.
Если измерительная прямая ориентирована так, что она пересекает как верхнюю, при рассматривании в направлении высоты транспортного средства, поперечную кромку, так и продольную кромку наружного контура торцевой поверхности, то можно в качестве альтернативы или дополнительно определять с помощью оптического измерительного устройства по меньшей мере с определенным отклонением положение верхней точки пересечения между верхней поперечной кромкой и измерительной прямой. Из геометрического соотношения относительного угла рыскания, положения верхней точки пересечения и положения оптического измерительного устройства на тягаче можно затем определять высоту прицепа/полуприцепа.
Если измерительная прямая ориентирована так, что она пересекает как поперечную кромку, так и продольную кромку наружного контура торцевой поверхности, то можно в качестве альтернативы и/или дополнительно определять с помощью оптического измерительного устройства по меньшей мере с определенным отклонением положение боковой точки пересечения между продольной кромкой и измерительной прямой. Из геометрического соотношения относительного угла рыскания, положения боковой точки пересечения и положения оптического измерительного устройства на тягаче можно определять ширину прицепа/полуприцепа.
Если измерительная прямая ориентирована параллельно или конгруэнтно по меньшей мере одной поперечной кромке наружного контура торцевой поверхности, то предпочтительно можно определять с помощью оптического измерительного устройства по меньшей мере с определенным отклонением положения обеих боковых точек пересечения между обеими продольными кромками и измерительной прямой. Из геометрического соотношения положений обеих боковых точек пересечения и положения оптического измерительного устройства на тягаче можно определять ширину прицепа/полуприцепа.
В качестве альтернативного решения и/или дополнительно, можно с помощью оптического измерительного устройства по меньшей мере с определенным отклонением определять положение по меньшей мере двух измерительных точек на измерительной прямой, когда измерительная прямая ориентирована параллельно или конгруэнтно по меньшей мере одной поперечной кромке наружного контура торцевой поверхности. Из геометрического соотношения положений обеих измерительных точек и положения оптического измерительного устройства на тягаче можно затем определять относительный угол рыскания между тягачом и прицепом/полуприцепом. При этом две измерительные точки могут быть предпочтительно расположены так, что они образуют обе боковые точки пересечения между обеими продольными кромками наружного контура торцевой поверхности и измерительной прямой, с целью определения с особенно высокой точностью относительного угла рыскания.
Если измерительная прямая ориентирована параллельно или конгруэнтно по меньшей мере одной продольной кромке наружного контура торцевой поверхности, то предпочтительно можно определять с помощью оптического измерительного устройства по меньшей мере с определенным отклонением положение верхней точки пересечения между верхней, при рассматривании в направлении высоты транспортного средства, поперечной кромкой и измерительной прямой. Из геометрического соотношения положения верхней точки пересечения и положения оптического измерительного устройства на тягаче можно определять высоту прицепа/полуприцепа.
В одном предпочтительном варианте выполнения способа можно с помощью оптического измерительного устройства определять положения по меньшей мере двух измерительных точек на торцевой поверхности прицепа/полуприцепа. При этом измерительные точки расположены так, что с их помощью по меньшей мере с определенным отклонением можно аппроксимировать и/или образовывать измерительную прямую. Таким образом, можно особенно просто задавать измерительную прямую и особенно просто определять положение измерительной прямой. Предпочтительно, измерительную прямую можно аппроксимировать с помощью способа RANSAC и/или с помощью способа линейной регрессии, с целью приближения измерительной прямой простым и достаточно точным образом.
Предпочтительно, с каждой продольной кромкой прицепа/полуприцепа может быть согласована соответствующая измерительная точка, с целью аппроксимации и/или образования измерительной прямой с особенно высокой точностью. В качестве альтернативного решения и/или дополнительно, с каждой поперечной кромкой прицепа/полуприцепа может быть согласована соответствующая измерительная точка. Кроме того, в качестве альтернативы и/или дополнительно, с одной продольной кромкой прицепа/полуприцепа или одной поперечной кромкой прицепа/полуприцепа может быть согласована соответствующая измерительная точка.
Предпочтительно, по меньшей мере одна измерительная точка оптического измерительного устройства может быть расположена в определенной ближней зоне вблизи продольной кромки прицепа/полуприцепа. С помощью этой измерительной точки можно затем аппроксимировать точку пересечения между продольной кромкой прицепа/полуприцепа и измерительной прямой. За счет этого можно особенно просто и с достаточной точностью аппроксимировать точку пересечения между продольной кромкой прицепа/полуприцепа и измерительной прямой.
В качестве альтернативного решения и/или дополнительно, по меньшей мере одна измерительная точка оптического измерительного устройства может быть расположена в определенной ближней зоне вблизи поперечной кромки прицепа/полуприцепа. С помощью этой измерительной точки можно затем аппроксимировать точку пересечения между поперечной кромкой прицепа/полуприцепа и измерительной прямой. За счет этого можно особенно просто и с достаточной точностью аппроксимировать точку пересечения между поперечной кромкой прицепа/полуприцепа и измерительной прямой.
Кроме того, для решения выше названной задачи предлагается система поддержки водителя для помощи водителю грузового автопоезда, при этом тягач грузового автопоезда имеет оптическое измерительное устройство, в частности лазерный сканер, с помощью которого можно отображать по меньшей мере одну измерительную прямую на передней, при рассматривании в продольном направлении транспортного средства, торцевой поверхности прицепа/полуприцепа и определять положение измерительной прямой. С помощью устройства обработки данных из положения измерительной прямой можно определять по меньшей мере одну статическую и/или динамическую характеристику грузового автопоезда. При этом наружный контур торцевой поверхности выполнен по существу в форме прямоугольника, или соответственно, прямоугольным.
Согласно изобретению, оптическое измерительное устройство выполнено и/или может быть расположено так, что измерительная прямая может быть ориентирована параллельно или конгруэнтно по меньшей мере одной проходящей в поперечном направлении транспортного средства поперечной кромке, в частности верхней кромке и/или нижней кромке, наружного контура торцевой поверхности, с целью определения с помощью устройства обработки данных ширины прицепа и/или относительного угла рыскания между тягачом и прицепом/полуприцепом.
В качестве альтернативного решения и/или дополнительно, оптическое измерительное устройство может быть выполнено и/или расположено так, что измерительная прямая может быть ориентирована параллельно или конгруэнтно по меньшей мере одной проходящей в направлении высоты транспортного средства продольной кромке, в частности боковой кромке, наружного контура торцевой поверхности, с целью определения с помощью устройства обработки данных высоты прицепа/полуприцепа.
Кроме того, в качестве альтернативного решения и/или дополнительно, оптическое измерительное устройство может быть выполнено и/или расположено так, что измерительная прямая пересекает как поперечную кромку, так и продольную кромку наружного контура торцевой поверхности, с целью определения с помощью устройства обработки данных относительного угла рыскания между тягачом и прицепом/полуприцепом, и/или высоты прицепа/полуприцепа, и/или ширины прицепа/полуприцепа.
Обеспечиваемые системой поддержки водителя преимущества идентичны с указанными выше преимуществами способа, согласно изобретению, так что они здесь не повторяются.
В одном предпочтительном варианте выполнения системы поддержки водителя, согласно изобретению, оптическое измерительное устройство и устройство обработки данных могут быть выполнены так, что с их помощью можно определять угол между измерительной прямой и поперечной кромкой наружного контура торцевой поверхности, и/или по меньшей мере с определенным отклонением положение верхней точки пересечения между верхней, при рассматривании в направлении высоты транспортного средства, поперечной кромкой наружного контура торцевой поверхности и измерительной прямой, и/или по меньшей мере с определенным отклонением положение боковой, при рассматривании в поперечном направлении транспортного средства, точки пересечения между продольной кромкой наружного контура торцевой поверхности и измерительной прямой. За счет этого можно особенно просто определять ширину прицепа/полуприцепа, высоту прицепа/полуприцепа и/или относительный угол рыскания между тягачом и прицепом/полуприцепом.
В одном предпочтительном конкретном варианте выполнения оптическое измерительное устройство может быть однострочным лазерным сканером, с целью обеспечения возможности определения положения измерительной прямой особенно дешевым образом. В качестве альтернативного решения, оптическое измерительное устройство может быть также многострочным лазерным сканером, с целью определения, например, посредством усреднения результатов расчета, статических и/или динамических характеристик с особенно высокой точностью. Для этого, в качестве альтернативы, может быть предусмотрено также несколько однострочных лазерных сканеров.
А именно, при выполнении оптического измерительного устройства в виде однострочного или многострочного лазерного сканера, можно ориентировать измерительную прямую желаемым образом, например, за счет целенаправленного позиционирования лазерного сканера на тягаче и целенаправленной ориентации лазерного сканера, или соответственно, плоскости (плоскостей) измерения лазерного сканера. Уже упомянутое предпочтительное расположение измерительных точек в зоне продольных кромок и/или поперечных кромок торцевой поверхности может быть достигнуто, соответственно, реализовано при выполнении оптического измерительного устройства в виде однострочного или многострочного лазерного сканера тем, что плоскость (плоскости) измерения в зоне торцевой поверхности является достаточно широкой, и с помощью большого количества измерительных точек в соответствующей плоскости измерения обеспечивается особенно точное сканирование торцевой поверхности.
Кроме того, предпочтительно, оптическое измерительное устройство, при рассматривании в продольном направлении транспортного средства, может быть ориентировано назад так, что с его помощью можно определять положения по меньшей мере двух измерительных точек на торцевой поверхности прицепа/полуприцепа, при этом измерительные точки расположены так, что с их помощью по меньшей мере с определенным отклонением можно аппроксимировать и/или образовывать измерительную прямую. С помощью по меньшей мере двух измерительных точек можно особенно просто и с достаточной точностью аппроксимировать и/или образовывать измерительную прямую.
Кроме того, предлагается грузовой автомобиль для выполнения способа, согласно изобретению, и/или содержащий систему поддержки водителя, согласно изобретению. Определяемые этим преимущества идентичны с уже указанными преимуществами способа, согласно изобретению, и/или системы поддержки водителя, так что они здесь не повторяются.
Поясненные выше и/или указанные в зависимых пунктах формулы изобретения предпочтительные варианты выполнения и/или модификации изобретения можно применять отдельно или в любых комбинациях друг с другом, за исключением случаев, например, однозначных зависимостей или несовместимых альтернатив.
Ниже приводится в качестве примера более подробное пояснение изобретения и его предпочтительных вариантов выполнения и модификаций, а также преимуществ, со ссылками на прилагаемые чертежи, на которых схематично изображено:
фиг. 1 - грузовой автопоезд, согласно изобретению, на виде сверху;
фиг. 2 - пояснение изображения согласно фиг. 1 на основе измерений с помощью лазерного сканера грузового автопоезда;
фиг. 3 - грузовой автопоезд с лазерным сканером в первой специальной ориентации;
фиг. 4 - грузовой автопоезд с лазерным сканером во второй специальной ориентации;
фиг. 5 - грузовой автопоезд с лазерным сканером в третьей специальной ориентации;
фиг. 6 - результаты измерения лазерного сканера при расположении лазерного сканера в его первой специальной ориентации;
фиг. 7 - результаты измерения лазерного сканера при расположении лазерного сканера в его третьей специальной ориентации;
фиг. 8 - измерительные точки лазерного сканера при расположении лазерного сканера в его третьей специальной ориентации.
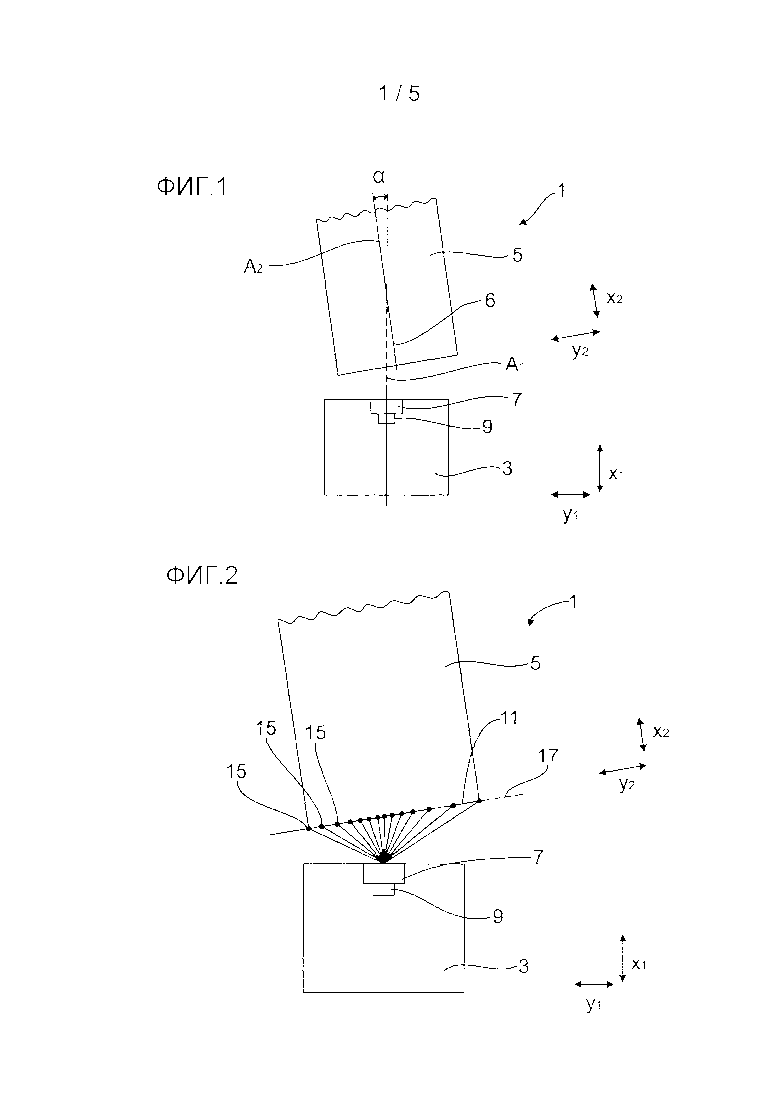
На фиг. 1 схематично показан грузовой автопоезд 1, который содержит тягач 3 и прицеп/полуприцеп 5. Тягач 3 может быть, например, седельным тягачом, в то время как прицеп/полуприцеп 5 может быть выполнен, например, в виде седельного прицепа. В показанном на фиг. 1 положении, тягач 3 расположен под углом относительно прицепа/полуприцепа 5, так что между тягачом 3 и прицепом/полуприцепом 5 образован относительный угол α рыскания. Для иллюстрации относительного угла α рыскания изображены ориентированная в продольном направлении х1 тягача средняя продольная ось А1 тягача и ориентированная в продольном направлении х2 прицепа/полуприцепа средняя продольная ось А2 прицепа/полуприцепа, угол между которыми в образованной продольным направлением х транспортного средства и поперечным направлением y транспортного средства горизонтальной плоскости образует относительный угол α рыскания. Кроме того, на фиг. 1 показана поворотная точка 6 прицепа/полуприцепа 5. Она лежит на средней продольной оси А2 прицепа/полуприцепа и расположена здесь лишь в качестве примера на расстоянии от точки пересечения средней продольной оси А1 тягача и средней продольной оси А2 прицепа/полуприцепа.
Как показано на фиг. 1, тягач 3 имеет схематично изображенный лазерный сканер 7, который соединен с возможностью передачи сигналов с также схематично изображенным устройством 9 обработки данных тягача 3. С помощью лазерного сканера 7 и устройства 9 обработки данных можно определять статические характеристики грузового автопоезда 1, в данном случае, например, ширину и высоту прицепа/полуприцепа, и динамические характеристики грузового автопоезда 1, в данном случае, например, относительный угол α рыскания между тягачом 3 и прицепом/полуприцепом 5.
Лазерный сканер 7 выполнен здесь лишь в качестве примера в виде однострочного лазерного сканера, за счет чего выходящие из лазерного сканера 7 лазерные лучи расположены в одной единственной измерительной строчке, или соответственно, плоскости измерения. С помощью лазерного сканера 7 можно определять положения измерительных точек, в которые лазерные лучи лазерного сканера 7 попадают в тело. Как показано на фиг. 2, лазерный сканер 7 тягача 3, при рассматривании в поперечном направлении y1 тягача, расположен по центру на тягаче 3 и ориентирован назад так, что его лазерные лучи попадают на переднюю, при рассматривании в осевом направлении х транспортного средства, торцевую поверхность 11 прицепа/полуприцепа. Торцевая поверхность 11 прицепа/полуприцепа выполнена плоской и проходит в направлении z2 высоты прицепа/полуприцепа и в поперечном направлении y2 прицепа/полуприцепа. Дополнительно к этому, наружный контур 13 передней торцевой поверхности 11 выполнен прямоугольным (см. фиг. 3, 4). На основании такого выполнения торцевой поверхности 11 можно с помощью измерительных точек 15 лазерного сканера 7 аппроксимировать измерительную прямую 17, проходящую в поперечном направлении y2 прицепа/полуприцепа и/или в направлении z2 высоты прицепа/полуприцепа. При этом аппроксимацию измерительной прямой 17 можно осуществлять, например, с помощью способа RANSAC или с помощью способа линейной регрессии. Кроме того, с помощью лазерного сканера 7 можно определять также положение, соответственно, пространственное положение измерительной прямой 17. Из положения измерительной прямой 17 можно с помощью устройства 9 обработки данных определять статические и динамические характеристики грузового автопоезда1.
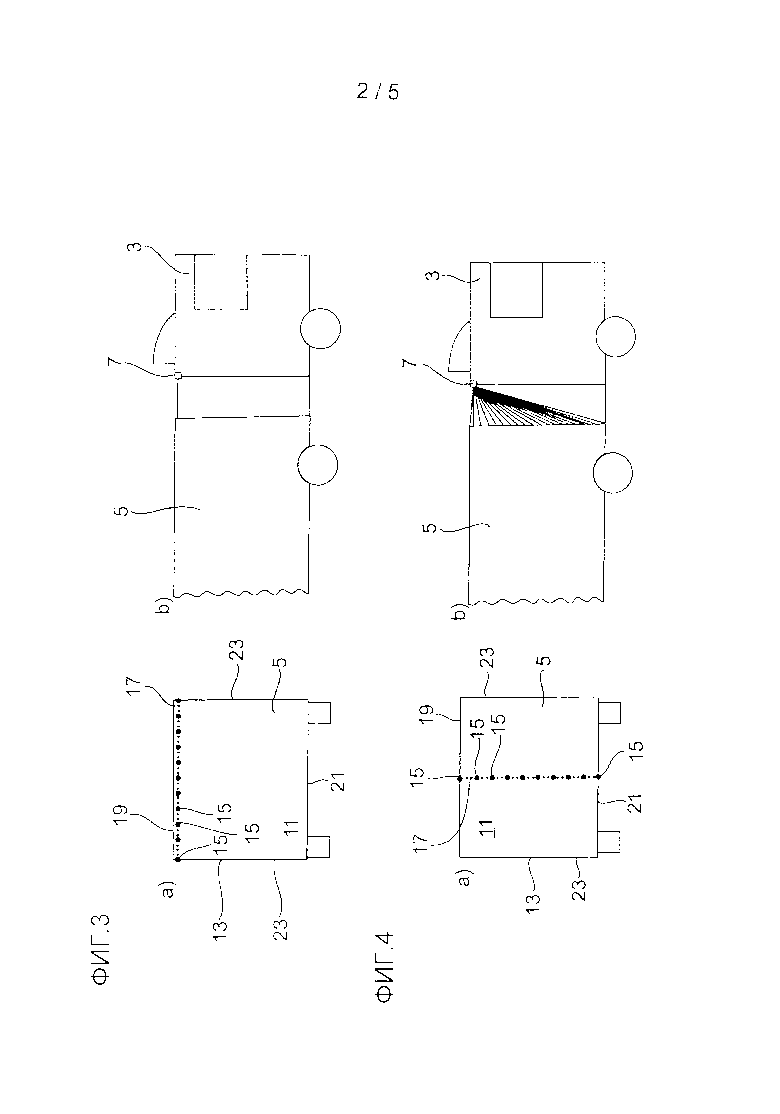
Как показано на фиг. 3, лазерный сканер 7 в качестве примера может быть расположен так, что измерительная прямая 17 ориентирована параллельно верхней кромке 19, проходящей в поперечном направлении y2 прицепа/полуприцепа, а также параллельно проходящей в поперечном направлении y2 нижней кромке 21 наружного контура 13 торцевой поверхности прицепа/полуприцепа 5. При такой ориентации измерительной прямой 17, можно особенно просто определять ширину прицепа/полуприцепа 5 и относительный угол рыскания между тягачом 3 и прицепом/полуприцепом 5.
Для определения ширины прицепа/полуприцепа 5, сначала с помощью лазерного сканера 7 определяются положения обеих боковых точек пересечения между проходящими в направлении z2 высоты прицепа/полуприцепа боковыми кромками 23 наружного контура 13 торцевой поверхности и измерительной прямой 17. Эти точки пересечения могут быть аппроксимированы, например, с помощью тех измерительных точек 15 лазерного сканера 7, которые лежат наиболее близко к боковым кромкам 23 наружного контура 13 торцевой поверхности. Из геометрических соотношений положений боковых точек пересечения и положения, или соответственно, ориентации лазерного сканера 7 на тягаче 7, можно затем с помощью устройства 9 обработки данных определять ширину прицепа/полуприцепа 5.
Для определения относительного угла рыскания между тягачом 3 и прицепом/полуприцепом 5 сначала с помощью лазерного сканера 7 определяются положения по меньшей мере двух измерительных точек 15 на измерительной прямой 17, в частности, положения обеих боковых точек пересечения между боковыми кромками 23 наружного контура 13 торцевой поверхности и измерительной прямой 17. Из геометрического соотношения положений по меньшей мере двух измерительных точек 15 и положения, соответственно, ориентации лазерного сканера 7 на тягаче 3 можно затем с помощью устройства 9 обработки данных определять относительный угол рыскания между тягачом 3 и прицепом/полуприцепом 5.
Как показано на фиг. 4, лазерный сканер 7 может быть также расположен, например, так, что измерительная прямая 17 ориентирована параллельно боковым кромкам 23 наружного контура 13 торцевой поверхности прицепа/полуприцепа 5. Если измерительная прямая 17 ориентирована так, то можно особенно просто определять высоту прицепа/полуприцепа 5.
При этом для определения высоты сначала с помощью лазерного сканера 7 определяется положение верхней, при рассматривании в направлении z2 высоты прицепа/полуприцепа, точки пересечения между верхней кромкой 19 наружного контура 13 торцевой поверхности и измерительной прямой 17. Эта точка пересечения может быть аппроксимирована, например, с помощью тех измерительных точек 15 лазерного сканера 7, которые лежат наиболее близко к верхней кромке 19 наружного контура 13 торцевой поверхности. Из геометрического соотношения положения верхней точки пересечения и положения, соответственно, ориентации лазерного сканера 7 на тягаче 3 можно затем с помощью устройства 9 обработки данных определять высоту прицепа/полуприцепа 5.
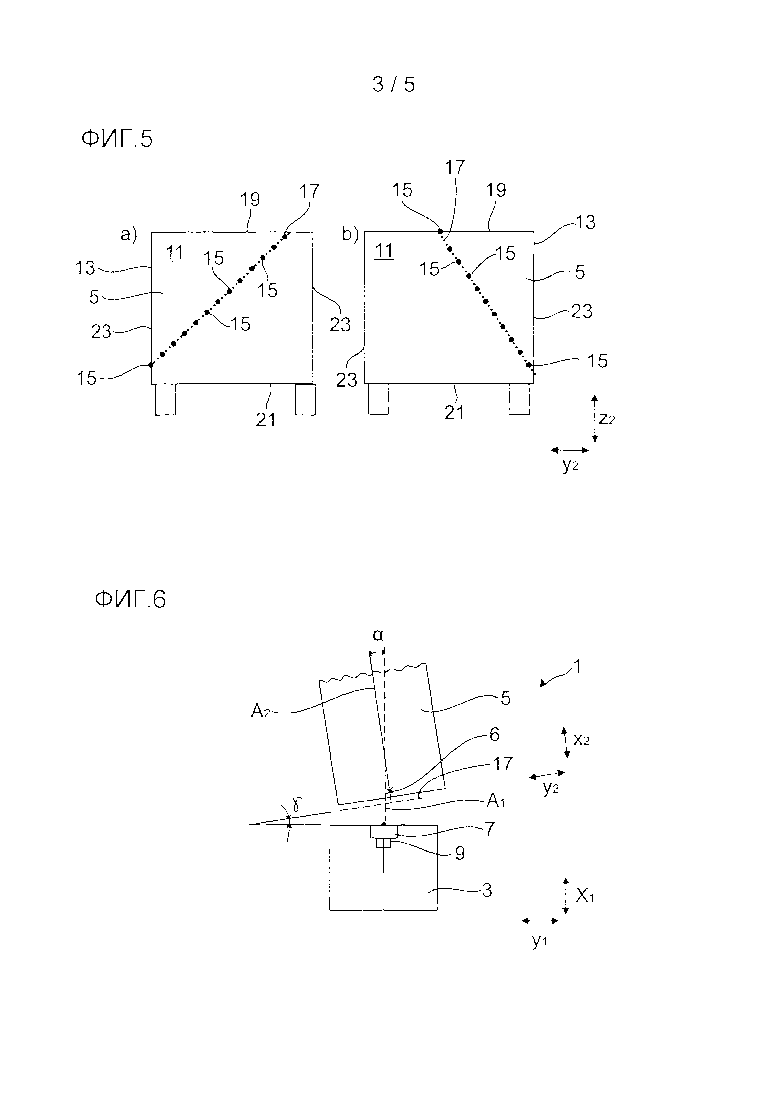
Как показано на фиг. 5, лазерный сканер 7, в данном случае лишь в качестве примера, может быть расположен также так, что измерительная прямая 17 пересекает как верхнюю кромку 19 наружного контура 13 торцевой поверхности, так и боковую кромку 23 наружного контура 13 торцевой поверхности, так что измерительная прямая 17 ориентирована с определенным углом β относительно нижней кромки наружного контура 13 торцевой поверхности. Если измерительная прямая 17 расположена так, то можно комбинированно определять относительный угол рыскания между тягачом 3 и прицепом/полуприцепом 5, ширину прицепа/полуприцепа 5 и высоту прицепа/полуприцепа 5.
При этом для определения относительного угла рыскания между тягачом 3 и прицепом/полуприцепом 5 можно сначала определять, например, с помощью лазерного сканера 7 по меньшей мере с определенным отклонением положения по меньшей мере двух измерительных точек на измерительной прямой 17, в частности, положения точек пересечения между верхней кромкой 19 и измерительной прямой 17, а также между боковой кромкой 23 и измерительной прямой 17. Из геометрического соотношения положений по меньшей мере двух измерительных точек и положения, соответственно, ориентации лазерного сканера 7 на тягаче 3 можно затем с помощью устройства 9 обработки данных определять относительный угол рыскания между тягачом 3 и прицепом/полуприцепом 5. А именно, для определения относительного угла рыскания из данных положения по меньшей мере двух измерительных точек можно определять, например, показанный на фиг. 6 угол γ измерительной прямой относительно образованной поперечной осью тягача и осью высоты тягача вертикальной плоскости (примечание: угол γ соответствует относительному углу α рыскания, когда измерительная прямая 17 ориентирована параллельно верхней кромке 19 и нижней кромке 21 наружного контура 13 торцевой поверхности).
Для определения высоты прицепа/полуприцепа 5 сначала определяется с помощью лазерного сканера 7 положение верхней, при рассматривании в направлении z2 высоты прицепа/полуприцепа, точки пересечения между верхней кромкой 19 наружного контура 13 торцевой поверхности и измерительной прямой 17. Эта точка пересечения может быть аппроксимирована, например, с помощью тех измерительных точек 15 лазерного сканера 7, которые лежат наиболее близко к верхней кромке 19 наружного контура 13 торцевой поверхности. Из геометрического соотношения относительного угла рыскания, положения верхней точки пересечения и положения, соответственно, ориентации лазерного сканера 7 на тягаче 3 можно с помощью устройства 9 обработки данных определять высоту прицепа/полуприцепа 5.
Для определения ширины прицепа/полуприцепа 5 сначала с помощью лазерного сканера 7 определяется положение боковой точки пересечения между одной из боковых кромок 23 наружного контура 13 торцевой поверхности и измерительной прямой 17. Эта точка пересечения может быть аппроксимирована, например, с помощью тех измерительных точек 15 лазерного сканера 7, которые лежат ближе всех к боковой кромке 23 наружного контура 13 торцевой поверхности. Из геометрического соотношения относительного угла рыскания, положения боковой точки пересечения и положения, соответственно, ориентации лазерного сканера 7 на тягаче 3 можно с помощью устройства 9 обработки данных определять ширину прицепа/полуприцепа 5. Однако при этом ширину прицепа/полуприцепа 5 можно надежно и точно определять лишь когда торцевая поверхность 11 прицепа/полуприцепа 5 выполнена и/или расположена симметрично относительно образованной средней продольной осью А2 прицепа/полуприцепа и осью высоты прицепа/полуприцепа вертикальной плоскости.
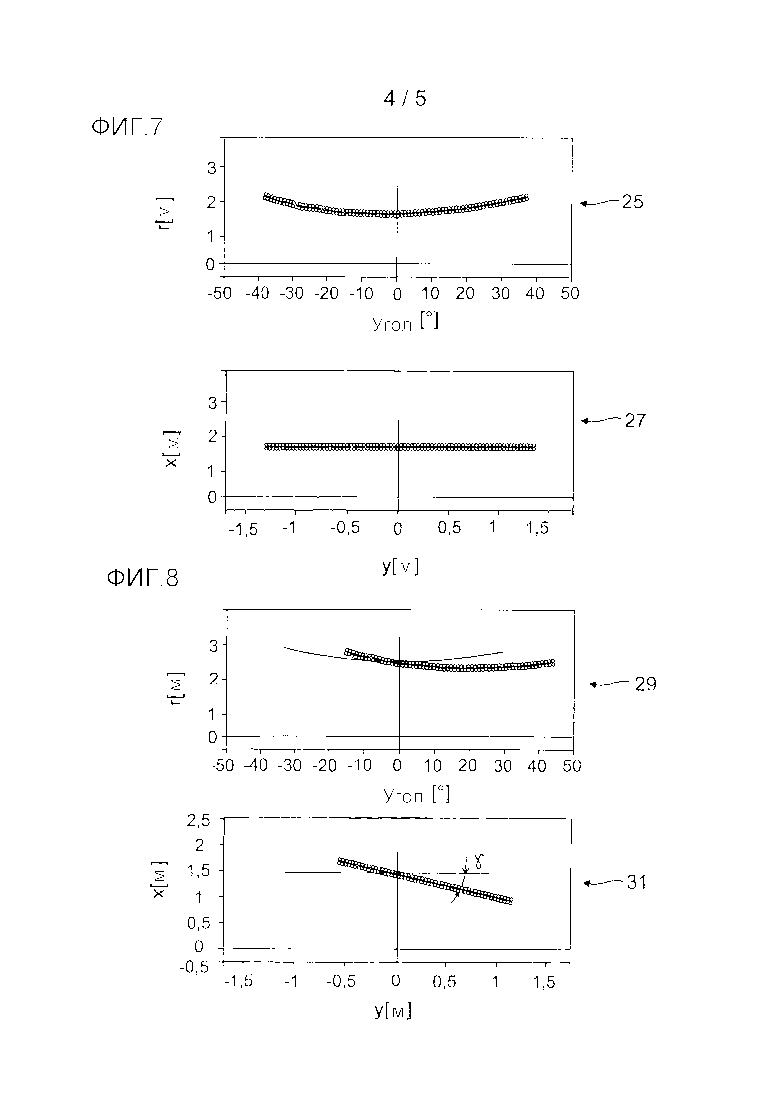
На фиг. 7 показан в качестве примера результат измерения с помощью лазерного сканера 7. При этом на первом графике 27 показаны положения измерительных точек 15 в прямоугольной системе координат. Аппроксимированная с помощью измерительных точек 15 измерительная прямая 17 проходит при этом измерении параллельно верхней кромке и нижней кромке наружного контура 13 торцевой поверхности прицепа/полуприцепа 5. Относительный угол α рыскания между тягачом 3 и прицепом/полуприцепом 5 составляет при измерении 0°.
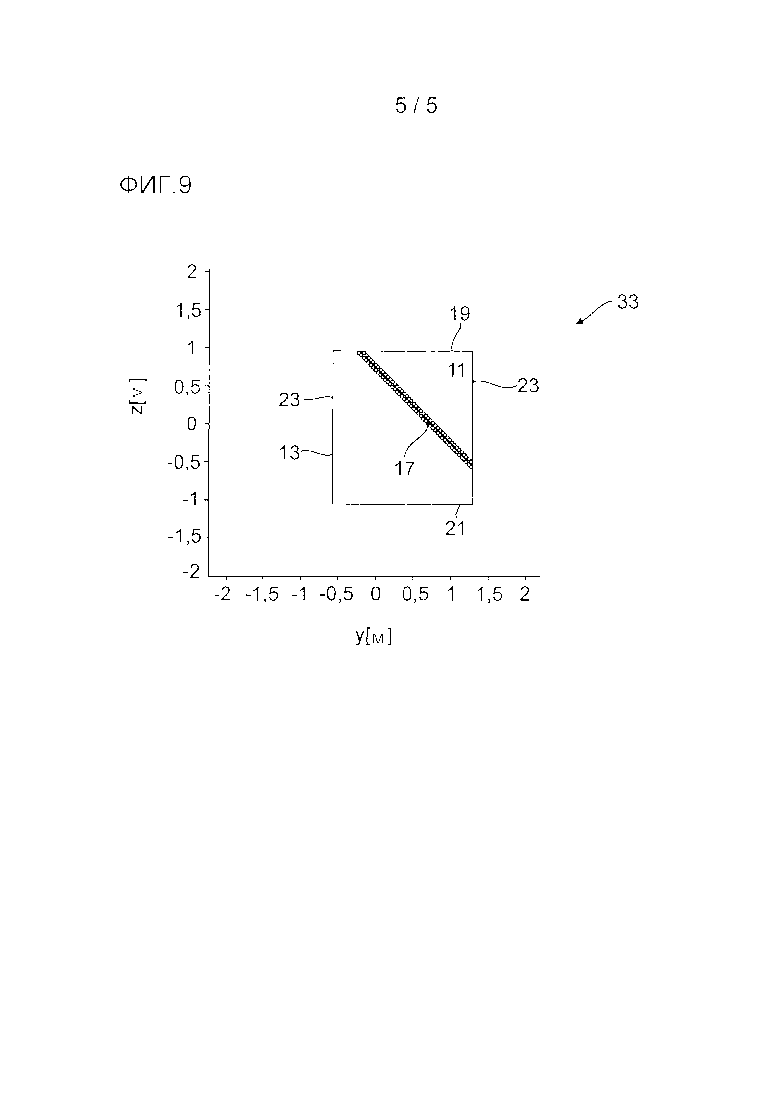
На фиг. 8 и 9 показан в качестве примера другой результат измерения с помощью лазерного сканера 7. При этом на третьем графике 29, на четвертом графике 31 и на пятом графике 33 снова показаны измеренные положения отдельных измерительных точек 15 лазерного сканера 7. На третьем графике 29 положения измерительных точек 15 показаны в полярной системе координат, в то время как на четвертом график 31 и на пятом графике 33 положения измерительных точек 15 показаны в прямоугольной системе координат. При этом на четвертом графике 31 положения измерительных точек 15 показаны в координатах х и y, на пятом графике 33 - в координатах z и y. Дополнительно к этому, на пятом графике 33 показано положение наружного контура 13 торцевой поверхности. Аппроксимированная с помощью измерительных точек 15 измерительная прямая 17 проходит при этом измерении под углом β, равным -45°, относительно нижней кромки 21 наружного контура 13 торцевой поверхности прицепа/полуприцепа 5. Относительный угол α рыскания между тягачом 3 и прицепом/полуприцепом 5 составляет при измерении -30°. Дополнительно к этому, на графике 31 показан возникающий при этом измерении, уже поясненный выше угол γ.
Перечень позиций
1 грузовой автопоезд
3 Тягач
5 Прицеп/полуприцеп
6 Поворотная точка прицепа/полуприцепа
7 Лазерный сканер
9 Устройство обработки данных
11 торцевая поверхность
13 Наружный контур
15 Измерительная точка
17 Измерительная прямая, или соответственно, равновесная прямая измерительных точек
19 Верхняя кромка
21 Нижняя кромка
23 Боковая кромка
25 Первый график
27 Второй график
29 Третий график
31 Четвертый график
33 Пятый график
А1 Средняя продольная ось тягача
А2 Средняя продольная ось прицепа/полуприцепа
α Относительный угол рыскания
β Угол между измерительной прямой и нижней кромкой
γ Угол подъема измерительной прямой
Группа изобретений относится к системе поддержки водителя грузового автопоезда. Тягач грузового автопоезда имеет оптическое измерительное устройство, с помощью которого определяют положение отображаемой на передней, при рассматривании в продольном направлении (х) транспортного средства, торцевой поверхности прицепа/полуприцепа грузового автопоезда измерительной прямой. Из положения измерительной прямой определяют статическую и/или динамическую характеристику грузового автопоезда. Наружный контур торцевой поверхности выполнен по существу прямоугольным. Достигается возможность определения статической и/или динамической характеристики грузового автопоезда. 3 н. и 13 з.п. ф-лы, 9 ил.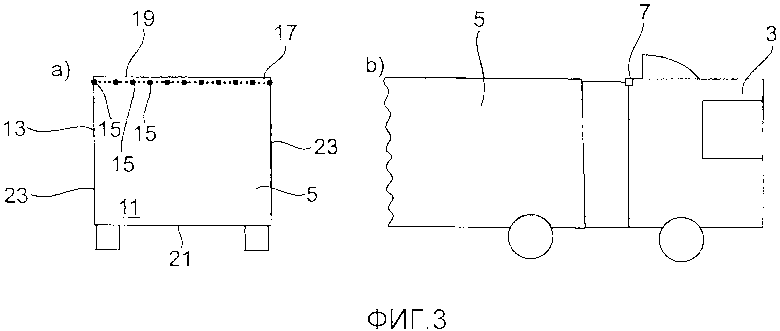
1. Способ поддержки водителя грузового автопоезда, при этом тягач (3) грузового автопоезда (1) имеет оптическое измерительное устройство (7), в частности лазерный сканер, с помощью которого определяют положение по меньшей мере одной отображаемой на передней, при рассматривании в продольном направлении (х) транспортного средства, торцевой поверхности (11) прицепа/полуприцепа (5) грузового автопоезда (1) измерительной прямой (17), при этом из положения измерительной прямой (17) определяют по меньшей мере одну статическую и/или динамическую характеристику грузового автопоезда (1), и при этом наружный контур (13) торцевой поверхности (11) выполнен по существу прямоугольным, отличающийся тем, что
измерительная прямая (17) ориентирована так, что она пересекает как проходящую в поперечном направлении (y) транспортного средства поперечную кромку (19, 21) наружного контура (13) торцевой поверхности, так и продольную кромку (23) наружного контура (13) торцевой поверхности, причем по меньшей мере с определенным отклонением определяют положения по меньшей мере двух измерительных точек (15) на измерительной прямой (17), в частности, положения точек пересечения между поперечной кромкой (19, 21) и измерительной прямой, а также между продольной кромкой (23) и измерительной прямой (17), и из геометрического соотношения положений по меньшей мере двух измерительных точек (15) и положения оптического измерительного устройства (7) на тягаче (3) определяют относительный угол (α) рыскания между тягачом (3) и прицепом/полуприцепом (5),
и/или
измерительная прямая (17) ориентирована параллельно или конгруэнтно по меньшей мере одной проходящей в направлении (z) высоты транспортного средства продольной кромке (23), в частности боковой кромке, наружного контура (13) торцевой поверхности для определения высоты прицепа/полуприцепа (5),
и/или
измерительная прямая (17) ориентирована так, что она пересекает как поперечную кромку (19, 21), так и продольную кромку (23) наружного контура (13) торцевой поверхности для определения относительного угла (α) рыскания между тягачом (3) и прицепом/полуприцепом (5), и/или высоты прицепа/полуприцепа (5), и/или ширины прицепа/полуприцепа (5).
2. Способ по п. 1 , отличающийся тем, что
измерительная прямая (17) ориентирована так, что она, при рассматривании в направлении (z) высоты транспортного средства, пересекает как верхнюю поперечную кромку (19), так и продольную кромку (23) наружного контура (13) торцевой поверхности,
что с помощью оптического измерительного устройства (7) по меньшей мере с определенным отклонением определяют положение верхней точки пересечения между верхней поперечной кромкой (19) и измерительной прямой (17), и
что из геометрического соотношения относительного угла (α) рыскания, положения верхней точки пересечения и положения оптического измерительного устройства (7) на тягаче (3) определяют высоту прицепа/полуприцепа (5).
3. Способ по п. 1, отличающийся тем, что измерительная прямая (17) ориентирована так, что она пересекает как поперечную кромку (19, 21), так и продольную кромку (23) наружного контура (13) торцевой поверхности,
что с помощью оптического измерительного устройства (7) по меньшей мере с определенным отклонением определяют положение боковой точки пересечения между продольной кромкой (23) и измерительной прямой (17), и
что из геометрического соотношения относительного угла (α) рыскания, положения боковой точки пересечения и положения оптического измерительного устройства (7) на тягаче (3) определяют ширину прицепа/полуприцепа (5).
4. Способ по п. 1, отличающийся тем, что измерительная прямая ориентирована параллельно или конгруэнтно по меньшей мере одной поперечной кромке (19, 21) наружного контура (13) торцевой поверхности,
что с помощью оптического измерительного устройства (7) по меньшей мере с определенным отклонением определяют положения обеих боковых точек пересечения между обеими продольными кромками (19, 21) и измерительной прямой (17), и
что из геометрического соотношения положений обеих боковых точек пересечения и положения оптического измерительного устройства (7) на тягаче (3) определяют ширину прицепа/полуприцепа (5).
5. Способ по п. 1, отличающийся тем, что измерительная прямая (17) ориентирована параллельно или конгруэнтно по меньшей мере одной поперечной кромке (19, 21) наружного контура (13) торцевой поверхности,
что с помощью оптического измерительного устройства (7) по меньшей мере с определенным отклонением определяют положения по меньшей мере двух измерительных точек (15) на измерительной прямой (17), в частности, положения обеих боковых точек пересечения между обеими продольными кромками (23) и измерительной прямой (17), и
что из геометрического соотношения положений обеих измерительных точек (15) и положения оптического измерительного устройства (7) на тягаче (3) определяют относительный угол (α) рыскания между тягачом (3) и прицепом/полуприцепом (5).
6. Способ по п. 1, отличающийся тем, что измерительная прямая (17) ориентирована параллельно или конгруэнтно по меньшей мере одной продольной кромке (23) наружного контура (13) торцевой поверхности,
что с помощью оптического измерительного устройства (7) по меньшей мере с определенным отклонением определяют положение верхней точки пересечения между верхней, при рассматривании в направлении (z) высоты транспортного средства, поперечной кромкой (19) и измерительной прямой (17), и
что из геометрического соотношения положения верхней точки пересечения и положения оптического измерительного устройства (7) на тягаче (3) определяют высоту прицепа/полуприцепа (5).
7. Способ по любому из пп. 1-6, отличающийся тем, что с помощью оптического измерительного устройства (7) определяют положения по меньшей мере двух измерительных точек (15) на торцевой поверхности (11) прицепа/полуприцепа (5), при этом измерительные точки расположены так, что с их помощью обеспечивается возможность аппроксимировать и/или образовывать по меньшей мере одну измерительную прямую (17), при этом измерительную прямую (17) аппроксимируют с помощью способа RANSAC и/или с помощью способа линейной регрессии.
8. Способ по п. 7, отличающийся тем, что с каждой продольной кромкой (19, 21) прицепа/полуприцепа (5) согласована соответствующая измерительная точка (15), и/или что с каждой поперечной кромкой (23) прицепа/полуприцепа (5) согласована соответствующая измерительная точка (15), и/или что с одной продольной кромкой (19, 21) прицепа/полуприцепа (5) и с одной поперечной кромкой (23) прицепа/полуприцепа (5) согласована соответствующая измерительная точка (15).
9. Способ по п. 7, отличающийся тем, что по меньшей мере одна измерительная точка (15) оптического измерительного устройства (7) расположена в определенной ближней зоне в зоне по меньшей мере одной продольной кромки (23) прицепа/полуприцепа (5), и что с помощью этой измерительной точки (15) аппроксимируют точку пересечения между продольной кромкой (23) прицепа/полуприцепа (5) и измерительной прямой (17).
10. Способ по п. 8, отличающийся тем, что по меньшей мере одна измерительная точка (15) оптического измерительного устройства (7) расположена в определенной ближней зоне в зоне по меньшей мере одной продольной кромки (23) прицепа/полуприцепа (5), и что с помощью этой измерительной точки (15) аппроксимируют точку пересечения между продольной кромкой (23) прицепа/полуприцепа (5) и измерительной прямой (17).
11. Способ по п. 7, отличающийся тем, что по меньшей мере одна измерительная точка (15) оптического измерительного устройства (7) расположена в определенной ближней зоне в зоне по меньшей мере одной поперечной кромки (19, 21) прицепа/полуприцепа (5), и что с помощью этой измерительной точки аппроксимируют точку пересечения между поперечной кромкой (19, 21) прицепа/полуприцепа (5) и измерительной прямой (17).
12. Способ по любому из пп. 8-10, отличающийся тем, что по меньшей мере одна измерительная точка (15) оптического измерительного устройства (7) расположена в определенной ближней зоне в зоне по меньшей мере одной поперечной кромки (19, 21) прицепа/полуприцепа (5), и что с помощью этой измерительной точки аппроксимируют точку пересечения между поперечной кромкой (19, 21) прицепа/полуприцепа (5) и измерительной прямой (17).
13. Система поддержки водителя для помощи водителю грузового автопоезда, при этом тягач (3) грузового автопоезда (1) имеет оптическое измерительное устройство (7), в частности лазерный сканер, выполненный с возможностью отображения по меньшей мере одной измерительной прямой (17) на передней, при рассматривании в продольном направлении (х) транспортного средства, торцевой поверхности (11) прицепа/полуприцепа (5) и определения положения измерительной прямой (17), при этом предусмотрено устройство (9) обработки данных, выполненное с возможностью определения по меньшей мере одной статической и/или динамической характеристики грузового автопоезда (1), из положения измерительной прямой (17), при этом наружный контур (13) торцевой поверхности выполнен по существу прямоугольным,
отличающаяся тем, что оптическое измерительное устройство (7) выполнено и/или предназначено для расположения так,
- что измерительная прямая (17) ориентирована так, что она пересекает как проходящую в поперечном направлении (y) транспортного средства поперечную кромку (19, 21) наружного контура (13) торцевой поверхности, так и продольную кромку (23) наружного контура (13) торцевой поверхности, для определения, по меньшей мере, с определенным отклонением, положения по меньшей мере двух измерительных точек (15) на измерительной прямой (17), в частности, положения точек пересечения между поперечной кромкой (19, 21) и измерительной прямой, а также между продольной кромкой (23) и измерительной прямой (17), и для определения относительного угла (α) рыскания между тягачом (3) и прицепом/полуприцепом (5) из геометрического соотношения положений по меньшей мере двух измерительных точек (15) и положения оптического измерительного устройства (7) на тягаче (3),
и/или
- что измерительная прямая (17) ориентирована параллельно или конгруэнтно по меньшей мере одной проходящей в направлении (z) высоты транспортного средства продольной кромке (23), в частности боковой кромке, наружного контура (13) торцевой поверхности для определения с помощью устройства (9) обработки данных высоты прицепа/полуприцепа (5),
и/или
- что измерительная прямая (17) пересекает как поперечную кромку (19, 21), так и продольную кромку (23) наружного контура (13) торцевой поверхности для определения с помощью устройства (9) обработки данных относительного угла (α) рыскания между тягачом (3) и прицепом/полуприцепом (5), и/или высоты прицепа/полуприцепа (5), и/или ширины прицепа/полуприцепа (5).
14. Система поддержки водителя по п. 15, отличающаяся тем, что оптическое измерительное устройство (7) и устройство (9) обработки данных выполнены так, что с их помощью, по меньшей мере, с определенным отклонением, обеспечивается возможность определения положения верхней точки пересечения между верхней поперечной кромкой (19) и измерительной прямой (17), и/или по меньшей мере с определенным отклонением положения боковой точки пересечения между продольной кромкой (23) и измерительной прямой (17).
15. Система поддержки водителя по любому из пп. 13 или 14, отличающаяся тем, что оптическое измерительное устройство (7) выполнено в виде однострочного лазерного сканера, и/или оптическое измерительное устройство (7), при рассматривании в продольном направлении (х) транспортного средства, выполнено с возможностью ориентации назад так, что с его помощью обеспечивается возможность определения положений по меньшей мере двух измерительных точек (15) на торцевой поверхности (11) прицепа/полуприцепа (5), при этом измерительные точки (15) расположены так, что с их помощью обеспечивается возможность аппроксимации и/или образования измерительной прямой.
16. Грузовой автомобиль для выполнения способа по любому из пп. 1-12, и/или содержащий систему поддержки водителя по любому из пп. 13-15.
| DE 102005042957 A1, 22.03.2007 | |||
| JP 2001334966 A, 04.12.2001 | |||
| WO 2008064892 A1, 05.06.2008 | |||
| DE 102004050149 A1, 20.04.2006. |

