Изобретение относится к способу стабилизации режима движения автопоезда, состоящего из тягача и прицепа, согласно признакам п.1 формулы.
Грузовые автомобили в будущем во все возрастающей степени будут оснащаться антиблокировочной системой (ABS), системой регулирования проскальзывания ведущих колес (ASR) и электронной программой стабильности (ESP), с тем чтобы стабилизировать автомобиль или автопоезд в критических дорожных ситуациях. Посредством систем ABS и ASR тормозными давлениями в отдельных тормозных цилиндрах колес индивидуально управляют так, что соответственно блокировка и проворачивание колес предотвращается.
С помощью системы ESP в критических, т.е. нестабильных режимах движения, в частности при опасности заноса, на одном или нескольких тормозных цилиндрах колес тягача и/или прицепа посредством электронных устройств активно управляют тормозными давлениями, с тем чтобы стабилизировать автомобиль или автопоезд. При этом в зависимости от режима движения могут происходить также более длительные тормозные вмешательства в прицеп или полуприцеп. В неблагоприятных условиях, в частности при плохом состоянии шин или при неправильно функционирующей антиблокировочной системе, такие длительные тормозные вмешательства могут привести к боковому "уводу" (смещению) прицепа или полуприцепа.
Эта проблема возникает, в частности, у прицепов или полуприцепов, затормаживаемых на поворотах. Торможения приводят тогда к потере боковой устойчивости, что может иметь следствием "увод". "Увод" может возникать как при торможении водителем, так и при электронном тормозном вмешательстве системой ESP.
Задачей изобретения является предотвращение "увода" прицепа.
Эта задача решается посредством признаков п.1 формулы. Предпочтительные выполнения и усовершенствования изобретения приведены в зависимых пунктах.
Основной принцип изобретения заключается в том, что во время торможений прицепа проверяют стабильность движения автопоезда и при наличии нестабильного режима движения автопоезд стабилизируют путем циклического или потактного снижения тормозных моментов колес прицепа или тормозного давления прицепа.
Другими словами, тормозные моменты колес прицепа или тормозное давление прицепа или полуприцепа "модулируют". "Модулирование" означает, что во время срабатывания тормозов прицепа постоянно "вводят" короткие фазы с отсутствием тормозного давления или лишь с малым тормозным давлением. Это может происходить в зависимости от дорожной ситуации, т.е. при неустойчивом тягаче и требуемом за счет этого вмешательстве системы ESP в прицеп/полуприцеп, тормозным давлением прицепа или полуприцепа управляют потактно.
Преимущественно модулирование или тактирование тормозных моментов колес прицепа происходит только в действительно критических дорожных ситуациях. Для этого необходимо контролировать "состояние движения" автопоезда. Состояние движения или стабильность автопоезда в данный момент является сложной векторной величиной, которая может быть приближенно описана множеством переменных.
Характерными для стабильности движения транспортного средства являются скорость транспортного средства или частота вращения отдельных колес, угол поворота, угол излома между прицепом и тягачом, скорость при угле излома, линейное ускорение, распределение осевой нагрузки и т.д.
Для измерения или определения этих величин на тягаче и прицепе предусмотрены различные датчики, такие, например, как датчики частоты вращения колес, датчики угла рыскания и т.д. Для обнаружения "опасности увода" могут быть предусмотрены также датчики для измерения или определения угла излома между прицепом и тягачом.
Тактирование или модулирование тормозных моментов колес прицепа может происходить как при торможении водителем, так и при тормозном вмешательстве системой ESP.
Изобретение пригодно, в частности, для автопоезда с оснащенным системой ESP тягачом. Преимущественно автопоезд оснащен датчиком для измерения угла излома между тягачом и полуприцепом.
В качестве альтернативы этому изобретение пригодно также для оснащенного системой ESP автопоезда без датчика угла излома. При управляемом системой ESP торможении полуприцепа, например на дороге с низким коэффициентом трения, вводимое системой ESP в полуприцеп тормозное давление в определенные интервалы времени уменьшается до нуля. За счет этого, как уже описано, полуприцеп стабилизируется, и "увод" предотвращается.
Если датчик угла излома отсутствует, угол излома можно оценить на основе других, имеющихся в распоряжении величин режима движения и специфически заданной математически-физической модели автомобиля. Для этого могут быть предусмотрены датчики, которые измеряют "ориентацию" тягача и полуприцепа, из чего может быть определен угол излома. Далее могут обрабатываться сигналы, подаваемые имеющейся в автомобиле навигационной системой или системой связи.
На основе заданной, специфической для данного автомобиля математически-физической модели система ESP вычисляет заданное значение угла излома между тягачом и полуприцепом.
Если вычисленный угол излома по величине заметно выше заданного значения, т.е. если между заданным и фактическим значениями имеется существенное отклонение и полуприцеп одновременно затормаживается, следует исходить из того, что существует опасность увода полуприцепа.
Для стабилизации этого нестабильного режима движения с помощью системы ESP тормозное давление для прицепа в определенные интервалы времени уменьшают до нуля. За счет этого колеса полуприцепа снова могут "разогнаться", т.е. ускориться, в результате чего создаются боковые усилия и полуприцеп стабилизируется.
Если в распоряжении отсутствует датчик для измерения угла излома между прицепом и тягачом, а угол излома нельзя определить или оценить иным образом, то проблема увода может быть решена также "превентивно". Это означает, что тактовое управление тормозным давлением или повторное "уменьшение тормозного усилия" происходит в определенных ситуациях, например на очень гладкой дороге, а именно без знания угла излома. Может быть предусмотрено, что при этом учитывается только предоставляемая тягачом информация.
Сигнал для уменьшения тормозных моментов колес или тормозного давления прицепа может передаваться, например, пневматически, электрически или по радио от тягача к прицепу.
Изобретение более подробно поясняется ниже с помощью примера выполнения в связи с чертежом.
На единственной фигуре изображена блок-схема способа, лежащего в основе изобретения.
Исходя из этапа 1 запуска, на этапе 2 постоянно проверяют, происходит ли тормозное воздействие в прицепе. Если тормозное воздействие отсутствует, то этап 2 проходят заново.
Если же тормозное воздействие в прицепе происходит, то на этапе 3 измеряют "стабильность" фактического режима движения, например, путем измерения угла излома между тягачом и прицепом, частоты вращения колес, продольных и поперечных ускорений, проскальзывания колес, распределения осевой нагрузки, уклона дороги и т.д.
В тормозной электронике автомобиля хранятся различные "режимные векторы", которые характеризуют критические режимы движения. Такие "критические векторы режима движения" могут быть образованы отдельными упомянутыми величинами режима движения или их комбинациями. Хранящиеся векторы режима движения схематично обозначены на фигуре блоком 4.
На этапе 5 сравнивают фактический режим движения с заданными критическими векторами режима движения. Если сравнение покажет, что нестабильный режим движения не имеет места, то возвращаются к этапу 2, т.е. тормозное вмешательство водителем или системой ESP не "модифицируют".
Если же имеет место критический режим движения, то на этапе 6 тормозные моменты колес прицепа или тормозное давление прицепа модулируют, т.е. тактируют. Тормозное давление прицепа или тормозные моменты колес, следовательно, кратковременно снижаются. Затем возвращаются к этапу 2 и весь алгоритм проверки проходят заново.
Изобретение относится к области автомобильного транспорта, а именно к способам стабилизации режима движения транспортных средств. Для стабилизации режима движения автопоезда проводят проверку наличия тормозного вмешательства в прицеп и сенсирование одной или нескольких величин режима движения, характеризующих стабильность автопоезда в данный момент. Определяют нестабильность режима движения. При обнаружении нестабильного режима движения снижают тормозные моменты на колесах прицепа, тормозные моменты колес прицепа или тормозное давление прицепа, или полуприцепа "модулируют", то есть во время срабатывания тормозов прицепа постоянно "вводят" короткие фазы с отсутствием тормозного давления или с малым тормозным давлением. Достигается предотвращение "увода" прицепа. 13 з.п. ф-лы, 1 ил.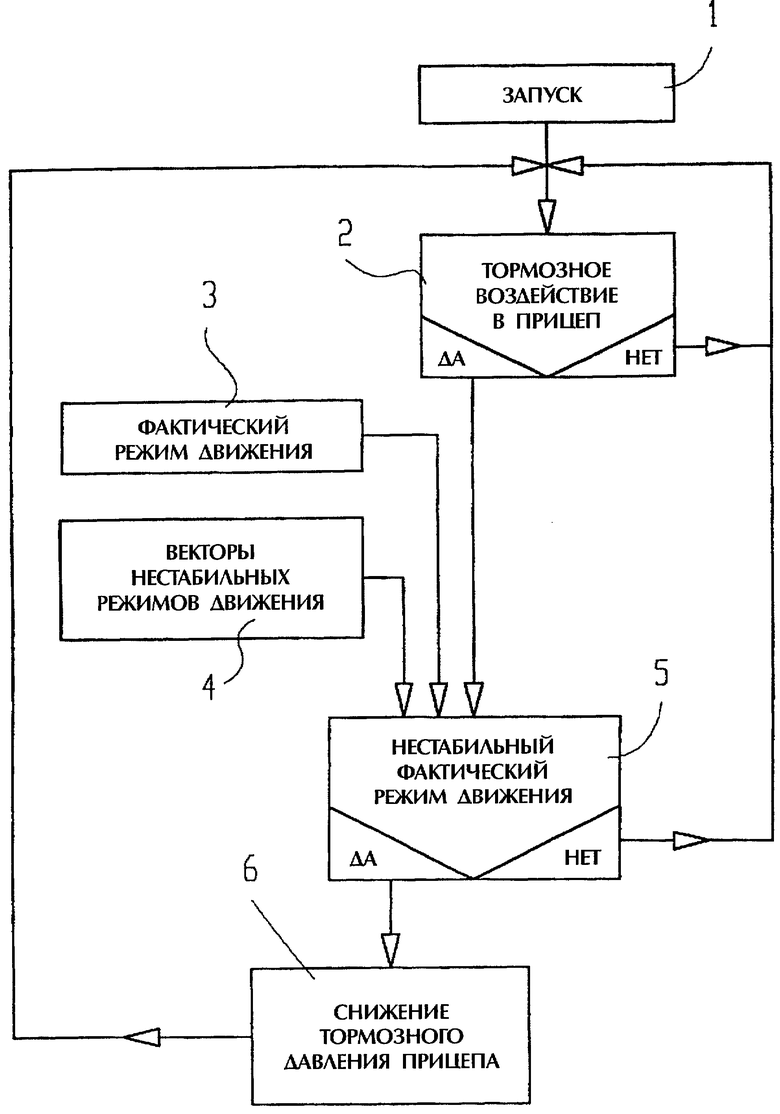
а) проверяют, имеет ли место тормозное вмешательство (2) в прицеп;
б) сенсируют (3) одну или несколько величин режима движения, характеризующих стабильность автопоезда в данный момент;
в) определяют, имеет ли место или предстоит нестабильный режим движения;
г) снижают (6) тормозные моменты на колесах прицепа, если при тормозном вмешательстве на этапе определения нестабильного режима движения обнаружен нестабильный режим движения, при этом тормозные моменты колес прицепа или тормозное давление прицепа или полуприцепа "модулируют", то есть во время срабатывания тормозов прицепа постоянно "вводят" короткие фазы с отсутствием тормозного давления или лишь с малым тормозным давлением.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНИМ ЭЛЕКТРИЧЕСКИ УПРАВЛЯЕМЫМ КОНТУРОМ ТОРМОЗНОГО ПРИВОДА МНОГОКОНТУРНОЙ СИСТЕМЫ ТОРМОЗОВ, ПРИВОДИМЫХ В ДЕЙСТВИЕ ДАВЛЕНИЕМ РАБОЧЕЙ СРЕДЫ | 1989 |
|
RU2049004C1 |
| Способ регулирования тормозного момента на колесе транспортного средства | 1980 |
|
SU933507A1 |
| Устройство управления торможением колес транспортного средства | 1979 |
|
SU867732A1 |
| Тормозная система автопоезда | 1980 |
|
SU919917A2 |
| DE 19964058 A, 05.07.2001. | |||

