Изобретение относится к способу и системе поддержки водителя для определения состояний динамики движения автомобиля общего назначения.
Информация о состояниях динамики движения автомобиля общего назначения, в частности, автопоезда с автомобилем общего назначения из автомобиля-тягача и прицепа/полуприцепа, это важные параметры для функциональной и надежной эксплуатации автомобиля. Такая информация в сочетании с системами поддержки водителя может показываться водителю и/или использоваться для непосредственного вмешательства в динамику движения.
Общеизвестно, что состояния динамики движения, такие как, например, относительный угол рыскания (угол отклонения) между автомобилем-тягачом и прицепом/полуприцепом автопоезда или угол поперечных колебаний прицепа/полуприцепа вокруг продольной оси или останов транспортного средства определяются посредством специально выполненных и расположенных сенсоров. Однако это зачастую является затруднительным и дорогостоящим.
Задачей изобретения является предложение способа и системы, в которых информация о динамике движения автомобиля общего назначения может быть получена относительно просто, надежно и с малыми затратами.
Эта задача в отношении способа согласно пункту 1 формулы изобретения решается таким образом, что по изображению по меньшей мере с одной камеры автомобиля общего назначения, ориентированной, в частности, в продольном направлении автомобиля, посредством устройства обработки изображений извлекается по меньшей мере одна информация о динамике движения автомобиля общего назначения, в частности, прицепа/полуприцепа и/или автомобиля-тягача автопоезда с автомобилем общего назначения.
Для этого одна или несколько камер целесообразно установлены на автомобиле-тягаче автопоезда с автомобилем общего назначения с таким расчетом, чтобы прицеп/полуприцеп регистрировался в изображении как минимум по меньшей мере в части возможных положений движения по меньшей мере частично. Такие камеры зачастую уже установлены на автомобилях общего назначения, например, в качестве составного элемента систем поддержки маневрирования, и таким образом могут использоваться в качестве дополнительной функции для определения состояний динамики движения с малыми затратами согласно изобретению, для чего видеоматериал с изображениями анализируется на предмет содержания в нем информации о динамике движения. Кроме того, понятие камеры в данной заявке следует воспринимать в широком смысле таким образом, что камера может быть выполнена как всякий вид устройства регистрации изображения, посредством которого изображения могут регистрироваться.
Относительный угол рыскания, обозначаемый также углом отклонения между автомобилем-тягачом и прицепом/полуприцепом автопоезда с автомобилем общего назначения, дает определяющую информацию о состояниях динамики движения при эксплуатации автомобиля. Согласно изобретению относительный угол рыскания может определяться таким образом, чтобы передняя вертикальная наружная кромка прицепа/полуприцепа, если смотреть в продольном направлении автомобиля, распознавалась и регистрировалась с каждой из сторон автомобиля, по меньшей мере одной камерой, направленной назад, если смотреть в продольном направлении автомобиля. При продольно направленном положении автопоезда угол рыскания равен 0. Однако, если при движении по кривой относительный угол рыскания возникает, например, как угол отклонения между автомобилем-тягачом и прицепом/полуприцепом, актуальное положение передней наружной кромки смещается относительно положения кромки при продольно направленном положении автопоезда. Величина такого участка смещения может определяться путем анализа изображения на камере. В этом случае по соответствующему актуальному положению кромки, или по величине участка смещения, а также по неизменным геометрическим параметрам, в частности, по положению центра поворота прицепа/полуприцепа и по ширине прицепа/полуприцепа, относительный угол рыскания может быть рассчитан просто, например, с помощью тригонометрических формул.
Таким образом, соответствующий актуальный относительный угол рыскания, предпочтительно, может рассчитываться быстро, просто и функционально надежно и непосредственно отображаться водителю в виде величины угла рыскания в системе поддержки водителя и/или использоваться для принятия мер по стабилизации движения.
Вместо обнаружения передней вертикальной наружной кромки, если смотреть в продольном направлении автомобиля, относительный угол рыскания как угол отклонения аналогичным образом может определяться также путем обнаружения задней вертикальной наружной кромки, если смотреть в продольном направлении автомобиля. Таким образом, и в данном случае относительный угол рыскания как угол отклонения может рассчитываться по отклонению актуального положения кромки от положения кромки при продольно направленном автопоезде при знании неизменного положения центра поворота прицепа/полуприцепа, а также габаритов, в частности, положения и ширины прицепа/полуприцепа, в сочетании с положением камеры.
Оба способа при необходимости могут комбинироваться, так что определение относительного угла рыскания осуществляется путем обнаружения положения передней и задней кромок прицепа/полуприцепа. Таким образом, для надежной регистрации при известных условиях может повышаться точность измерения и достигаться избыточность.
Относительный угол поперечных колебаний прицепа/полуприцепа вокруг продольной оси, то есть его боковой наклон относительно вертикали к земной поверхности также является существенной информацией о динамике движения. Для определения относительного угла поперечных колебаний вокруг продольной оси соответствующим образом анализируется также видеоданные: для этого по меньшей мере одной камерой с каждой из сторон автомобиля, если смотреть в продольном направлении автомобиля, направленной назад, регистрируется, если смотреть в продольном направлении автомобиля, задняя и/или передняя вертикальная наружная кромка прицепа/полуприцепа и определяется вертикаль к земной поверхности. Путем анализа угла актуальный относительный угол поперечных колебаний вокруг продольной оси определяется как угол между вертикалью и задней и/или передней вертикальной наружной кромкой прицепа/полуприцепа. Затем полученная таким образом величина угла поперечных колебаний вокруг продольной оси используется для последующей обработки в системе поддержки водителя для индикации или корректировки. Положение вертикали к земной поверхности может определяться по известному положению установки и направлению камеры, установленной на автомобиле-тягаче, в частности, на кабине водителя, причем при необходимости могут констатироваться и учитываться с поправкой поперечные колебания кабины водителя. Альтернативно или дополнительно земная поверхность и тем самым соответствующая вертикаль могут определяться также, например, посредством стерео- и/или монокамеры и соответствующих алгоритмов обработки изображений.
В соответствии с уровнем техники скорость движения и остановка автомобиля общего назначения, в частности, автопоезда с автомобилем общего назначения, общеизвестным способом могут определяться с относительно малыми затратами посредством датчиков частоты вращения. Однако, к сожалению, эти датчики функционируют не до полной остановки, а лишь до нижнего предела скорости, так что очень медленное качение автомобиля обнаруживается ненадежно. К сожалению, направление поворота и тем самым направление движения медленно катящегося автомобиля такими датчиками частоты вращения также не определяются.
Поэтому по изображению с камеры с помощью устройства для обработки изображений в оптическом потоке, предлагается, например, распознавать относительное движение или остановку между автопоездом с автомобилем общего назначения и зарегистрированным фоном, в частности, дорожным полотном. Если устанавливается относительное движение, то, кроме того, в результате анализа векторов движения оптического потока может устанавливаться направление движения автомобиля общего назначения вперед или назад. В этом случае соответствующие сигналы могут использоваться в системе поддержки водителя, например, для отображения на дисплее для водителя или для автоматического торможения.
Кроме того, заявляются системы поддержки водителя содержащие компоненты, с помощью которых реализуются признаки способа и этапы способа.
Ниже изобретение поясняется со ссылками на чертежи, на которых показано:
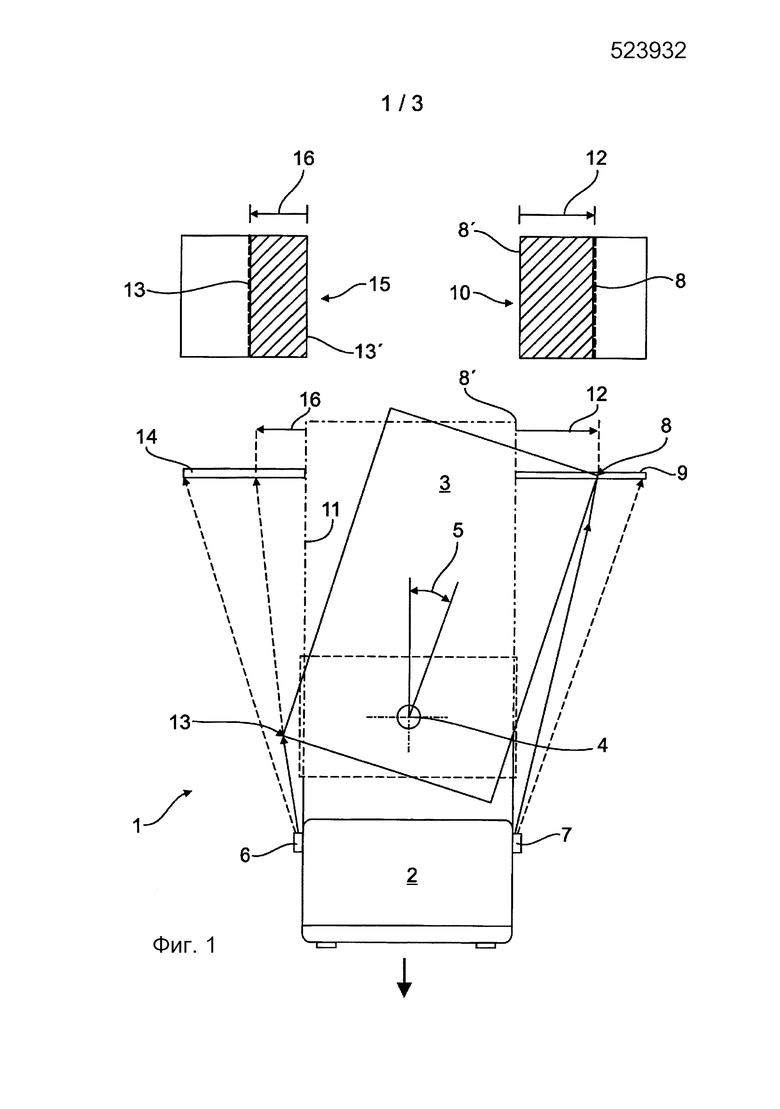
фиг. 1 - схематичный вид сверху автопоезда с автомобилем общего назначения с двумя схематичными изображениями с камеры для определения относительного угла рыскания,
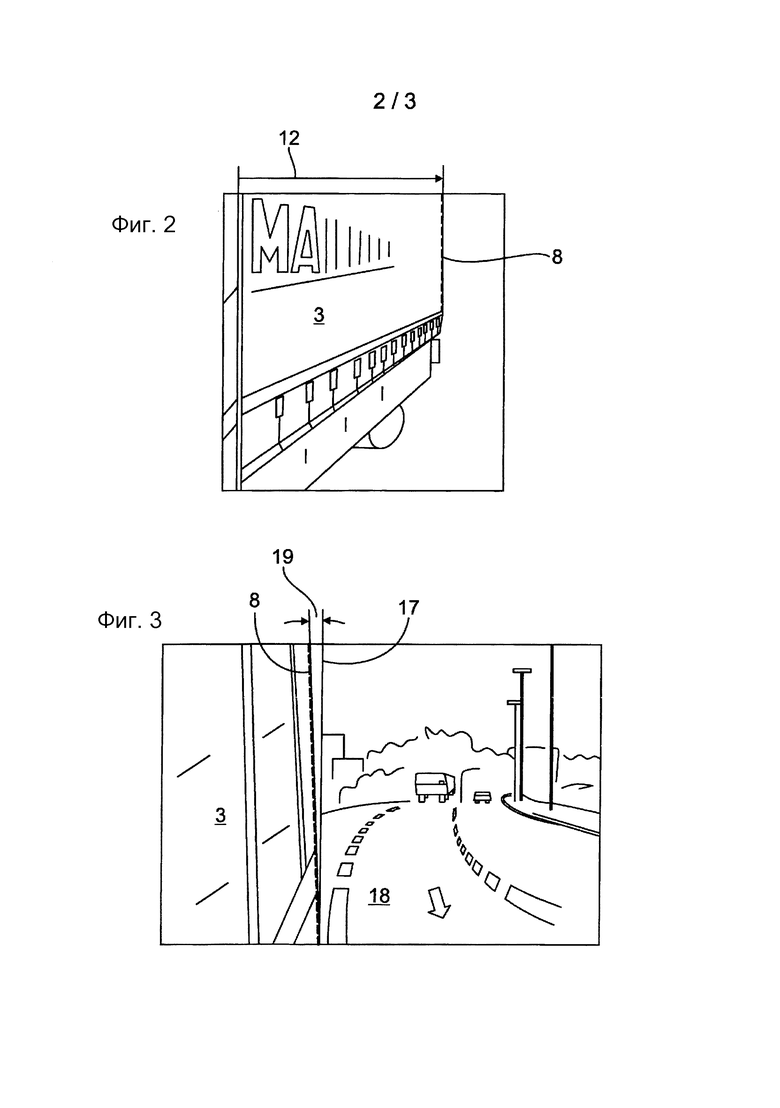
фиг. 2 - в качестве примера конкретное отображение правого верхнего изображения с камеры согласно фиг. 1,
фиг. 3 - изображение с камеры для определения относительного угла поперечных колебаний вокруг продольной оси и
фиг. 4 - блок-схема способа определения относительного угла рыскания.
На фиг. 1 очень схематично изображен вид сверху автопоезда 1 с автомобилем общего назначения, состоящего из автомобиля-тягача 2 и полуприцепа 3.
Автопоезд 1 с автомобилем общего назначения находится в движении по кривой, вследствие чего полуприцеп 3 тянется автомобилем-тягачом 2 с поворотами относительно центра 4 поворота полуприцепа на относительный угол рыскания как угол отклонения.
С обеих продольных сторон кабины водителя на автомобиле-тягаче 2 установлены соответствующие одинаковые камеры 6 и 7. Камеры 6, 7 направлены таким образом, чтобы они регистрировали полуприцеп 3 в его разных положениях движения в боковой области. Автопоезд 1 с автомобилем общего назначения находится на данного фиг. на повороте дороги влево, так что поворачивается в сторону водителя и регистрируется камерой 7 со стороны водителя задняя вертикальная наружная кромка 8 полуприцепа 3, если смотреть в продольном направлении x автомобиля. Для этого в поперечной плоскости задней вертикальной наружной кромкой 8 схематически отображено виртуальное вертикальное изображение 9 (или фрагмент изображения) с камеры, которое над ним в качестве горизонтального изображения 10 с камеры представлено в плоскости чертежа.
Штриховой линией 11 изображен полуприцеп 3 при движении по прямой или соответственно при продольно направленном автопоезде 1 с автомобилем общего назначения. В этом состоянии движения задняя вертикальная наружная кромка 8' может распознаваться и регистрироваться камерой 7 со стороны водителя с левого бокового края изображений 9 или соответственно 10 на камере. По сравнению с этим при изображенном движении по кривой задняя вертикальная наружная кромка 8, напротив, расположена в изображении на камере со сдвигом на боковой участок 12 смещения вправо, если смотреть в поперечном направлении y автомобиля. По величине изменяемого участка 12 смещения в сочетании с неизменными геометрическими габаритами, в частности, с размещением и направлением камеры 7, с положением центра 4 поворота полуприцепа и с известными габаритами полуприцепа 3, рассчитывается и извлекается угол 5 отклонения.
Аналогичным образом альтернативно или дополнительно угол 5 отклонения может определяться также путем обнаружения передней вертикальной наружной кромки 13, если смотреть в продольном направлении x автомобиля. При этом при изображенном движении по кривой обнаруживается правая передняя вертикальная наружная кромка 13, которая поворачивается в сторону пассажира и регистрируется камерой 6 со стороны пассажира. Для сравнения с вышеописанным изображением 14 с камеры в данном случае в той же самой вертикальной поперечной плоскости показано соответствующее вертикальное изображение 14 с камеры, переведенное над ним в плоскости чертежа в виде горизонтального изображения 15 с камеры. В данном случае актуальное положение 13 наружной кромки по сравнению с положением передней вертикальной наружной кромки 13' при продольно направленном автопоезде с автомобилем общего назначения также сдвинуто на участок 16 смещения. По величине участка 16 смещения и в данном случае в сочетании с известными габаритами полуприцепа и известным положением центра 4 поворота полуприцепа также может определяться соответствующий актуальный угол 5 отклонения.
На фиг. 2 воспроизведено более конкретное изображение 10 с камеры согласно фиг. 1, на котором показано, что в частности, задняя вертикальная наружная кромка 8 в верхней области полуприцепа, если смотреть в продольном направлении x автомобиля, релевантна для используемых алгоритмов обработки изображений для определения угла 5 отклонения.
На фиг. 3 показано изображение с камеры 7, расположенной со стороны водителя, на котором положение задней вертикальной наружной кромки 8 полуприцепа анализируется для определения угла поперечных колебаний полуприцепа 3 вокруг продольной оси. Для этого поперек задней вертикальной наружной кромки 8 виртуально строится вертикаль 17 к земной поверхности 18. Угол, получающийся между наружной кромкой 8 и вертикалью 17, является актуальным относительным углом 19 поперечных колебаний вокруг продольной оси.
При направлении камеры в соответствии с фиг. 3 или с помощью камеры, направленной еще больше вниз к дорожному полотну, в сочетании с направлением движения вперед или назад в результате анализа, например, изображения с камеры на фиг. 2, могут определяться также остановка и/или незначительная скорость качения автомобиля. При этом с помощью алгоритмов обработки изображений анализируется оптический поток и распознаются относительное движение между автопоездом с автомобилем общего назначения и зарегистрированным фоном, в частности, дорожным полотном 18, включая направление движение, или остановка.
Информация, полученная относительно состояний динамики движения угла отклонения, угла поперечных колебаний вокруг продольной оси и остановки автопоезда или качения, может использоваться в соответствующих системах поддержки водителя для подачи водителю предупредительных сигналов и/или для автоматических вмешательств в движение для стабилизации движения.
На фиг. 4 в качестве примера приведена блок-схема способа определения относительного угла 5 рыскания, или соответственно угла отклонения, поясняемого со ссылкой на фиг. 1:
На первом этапе способа происходит распознание задней и/или передней вертикальной наружной кромки 8, 13 полуприцепа 3 автопоезда 1 в изображении 10, 15 с камеры, если смотреть в продольном направлении x автомобиля. На следующем этапе способа определяется величина бокового участка 12, 16 смещения наружных кромок 8, 13 относительно продольно направленного положения автопоезда в изображении 10, 15 с камеры, если смотреть в поперечном направлении y автомобиля. В последующем логическом блоке для принятия решения устанавливается наличие такого участка 12, 16 смещения. Если таковой отсутствует, автопоезд направлен продольно без угла отклонения. Если участок 12, 16 смещения определяется, то актуальный относительный угол рыскания (угол отклонения) рассчитывается при этом с использованием известных неизменных положений и габаритов камер, центра поворота и полуприцепа. На последнем этапе способа в соответствующей системе поддержки водителя для дальнейшего использования предоставляются актуально определенные величины угла рыскания.
Перечень позиций
автопоезд с автомобилем общего назначения
автомобиль-тягач
полуприцеп
центр поворота полуприцепа
угол отклонения (относительный угол рыскания)
камера
камера
8, 8′ задняя вертикальная наружная кромка
9. вертикальное изображение с камеры
горизонтальное изображение с камеры
штриховая линия
участок смещения
13,13′ передняя вертикальная наружная кромка
вертикальное изображение с камеры
горизонтальное изображение с камеры
участок смещения
вертикаль
земная поверхность
относительный угол поперечных колебаний вокруг продольной оси
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ПОДДЕРЖКИ ВОДИТЕЛЯ ГРУЗОВОГО АВТОМОБИЛЯ И ГРУЗОВОЙ АВТОМОБИЛЬ | 2015 |
|
RU2693422C2 |
| СПОСОБ И СИСТЕМА ПОДДЕРЖКИ ВОДИТЕЛЯ ДЛЯ ПОМОЩИ ВОДИТЕЛЮ ГРУЗОВОГО АВТОПОЕЗДА | 2015 |
|
RU2693126C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ, В ЧАСТНОСТИ ТРАНСПОРТНОГО СРЕДСТВА ПРОМЫШЛЕННОГО НАЗНАЧЕНИЯ С ПРИЦЕПОМ | 2015 |
|
RU2708471C2 |
| СПОСОБ СТАБИЛИЗАЦИИ РЕЖИМА ДВИЖЕНИЯ ГРУЗОВОГО АВТОПОЕЗДА | 2002 |
|
RU2300471C2 |
| ПРИЦЕП ДЛЯ АВТОПОЕЗДА | 2001 |
|
RU2282551C2 |
| АВТОПОЕЗД | 2008 |
|
RU2368528C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2721343C1 |
| Способ автоматического определения в поле видеонаблюдения статистических характеристик рассеивания траекторий характерных точек транспортных средств | 2022 |
|
RU2779971C1 |
| БОЛЬШЕГРУЗНЫЙ АВТОПОЕЗД | 2003 |
|
RU2255018C1 |
| АВТОМОБИЛЬНЫЙ ПОЛУПРИЦЕП | 2009 |
|
RU2397892C1 |

Изобретение относится к способу и системе поддержки водителя при определении состояний динамики движения автомобиля. Способ определения состояний динамики движения автомобиля общего назначения состоит из изображения по меньшей мере с одной камеры автомобиля общего назначения, посредством устройства обработки изображения извлекают по меньшей мере одну информацию о динамике движения: угол отклонения между прицепом/полуприцепом и автомобилем-тягачом автопоезда, относительный угол поперечных колебаний прицепа/полуприцепа. Причем на автомобиле-тягаче автопоезда устанавливают по меньшей мере одну камеру на продольной стороне кабины водителя и направление одной камеры выбирают таким образом, что прицеп/полуприцеп как минимум в одной части возможных положений движения частично регистрируют на изображении с камеры. Система поддержки водителя для определения состояний динамики движения автомобиля общего назначения содержит изображение по меньшей мере с одной камеры автомобиля общего назначения, с помощью устройства обработки изображений извлекается информация о динамике движения: угол отклонения между прицепом/полуприцепом и автомобилем-тягачом автопоезда. Достигается надежное получение информации о динамике движения автомобиля. 3 н. и 13 з.п. ф-лы, 4 ил.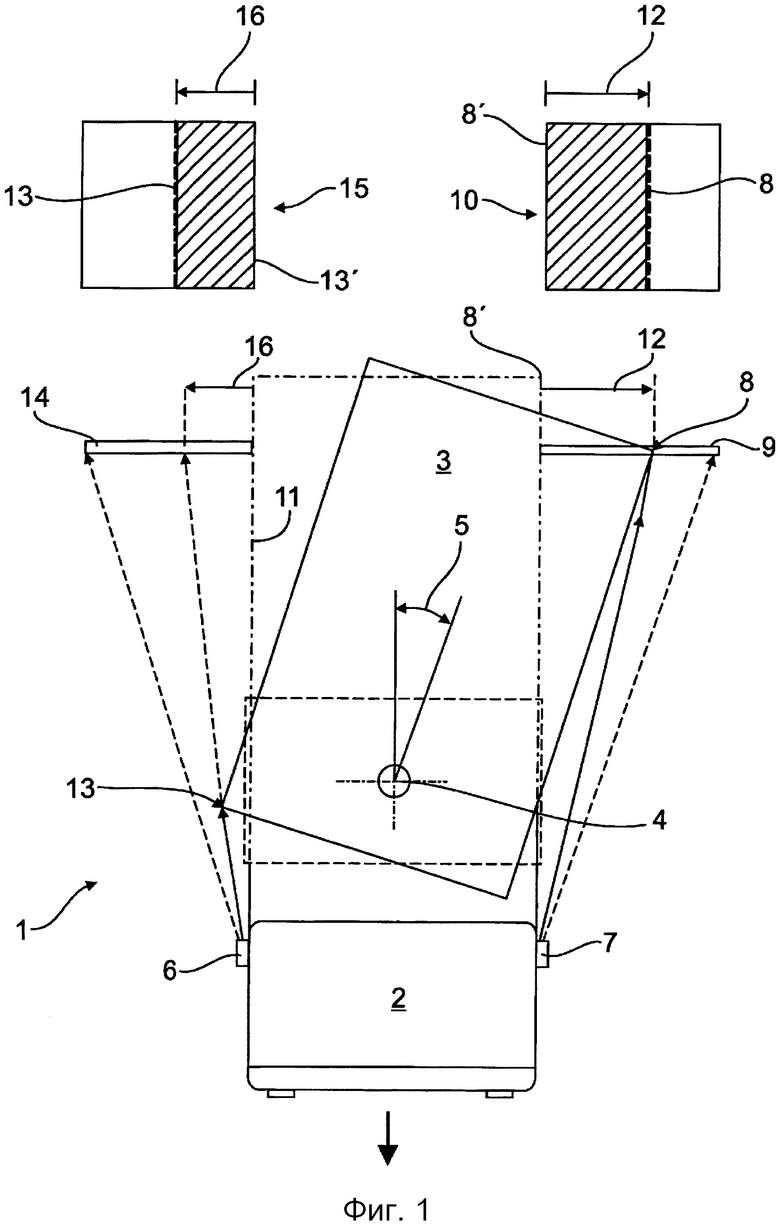
1. Способ определения состояний динамики движения автомобиля общего назначения,
отличающийся тем, что
из изображения (10, 15) по меньшей мере с одной камеры (6, 7) автомобиля общего назначения, в частности направленной в продольном направлении (х) автомобиля, посредством устройства обработки изображения извлекают по меньшей мере одну информацию о динамике движения: угол (5) отклонения между прицепом/полуприцепом (3) и автомобилем-тягачом (2) автопоезда (1) с автомобилем общего назначения, относительный угол (19) поперечных колебаний прицепа/полуприцепа (3) вокруг продольной оси и информацию об останове автомобиля,
причем на автомобиле-тягаче (2) автопоезда (1) с автомобилем общего пользования устанавливают по меньшей мере одну камеру (6, 7) на продольной стороне кабины водителя и направление по меньшей мере одной камеры (6, 7) выбирают таким образом, что прицеп/полуприцеп (3) как минимум по меньшей мере в одной части возможных положений движения по меньшей мере частично регистрируют на изображении (10, 15) с камеры.
2. Способ по п. 1, отличающийся тем,
что информацией является относительный угол рыскания как угол (5) отклонения между автомобилем-тягачом (2) и прицепом/полуприцепом (3) и его определяют таким образом,
что, если смотреть в продольном направлении (х) автомобиля, переднюю вертикальную наружную кромку (13) прицепа/полуприцепа (3) регистрируют с каждой из сторон автомобиля по меньшей мере одной камерой (6), направленной назад, если смотреть в продольном направлении (х) автомобиля,
что актуальное положение передней наружной кромки (13), в частности величину бокового участка (16) смещения относительно положения кромки (13′), если смотреть в поперечном направлении (y) автомобиля, определяют при продольно направленном положении автопоезда и
что по этому актуальному положению кромки (13) и по неизменным геометрическим параметрам, в частности по положению центра (4) поворота прицепа/полуприцепа и по ширине прицепа/полуприцепа, относительный угол рыскания между автомобилем-тягачом (2) и прицепом/полуприцепом (3) рассчитывают как угол (5) отклонения.
3. Способ по п. 1, отличающийся тем,
что информацией является относительный угол рыскания как угол (5) отклонения между автомобилем-тягачом (2) и прицепом/полуприцепом (3) и его определяют таким образом,
что, если смотреть в продольном направлении (х) автомобиля, переднюю вертикальную наружную кромку (13) прицепа/полуприцепа (3) регистрируют с каждой из сторон автомобиля по меньшей мере одной камерой (6), направленной назад, если смотреть в продольном направлении (х) автомобиля,
что актуальное положение передней наружной кромки (13), в частности величину бокового участка (16) смещения относительно положения кромки (13′), если смотреть в поперечном направлении (y) автомобиля, определяют при продольно направленном положении автопоезда и
что по этому актуальному положению кромки (13) и по неизменным геометрическим параметрам, в частности по положению центра (4) поворота прицепа/полуприцепа и по ширине прицепа/полуприцепа, относительный угол рыскания между автомобилем-тягачом (2) и прицепом/полуприцепом (3) рассчитывают как угол (5) отклонения.
4. Способ по п. 2, отличающийся тем,
что заднюю вертикальную наружную кромку (8) прицепа/полуприцепа (3), если смотреть в продольном направлении (х) автомобиля, регистрируют с каждой из сторон автомобиля по меньшей мере одной камерой, направленной назад, если смотреть в продольном направлении (х) автомобиля,
что определяют положение задней наружной кромки (8) и
что по этому актуальному положению кромки (8), как и по положению центра (4) поворота прицепа/полуприцепа, а также по длине и ширине прицепа/полуприцепа (3) относительный угол рыскания, формирующий информацию, рассчитывают как угол (5) отклонения.
5. Способ по п. 3, отличающийся тем,
что заднюю вертикальную наружную кромку (8) прицепа/полуприцепа (3), если смотреть в продольном направлении (х) автомобиля, регистрируют с каждой из сторон автомобиля по меньшей мере одной камерой, направленной назад, если смотреть в продольном направлении (х) автомобиля,
что определяют положение задней наружной кромки (8) и
что по этому актуальному положению кромки (8), как и по положению центра (4) поворота прицепа/полуприцепа, а также по длине и ширине прицепа/полуприцепа (3) относительный угол рыскания, формирующий информацию, рассчитывают как угол (5) отклонения.
6. Способ по любому из пп. 2-5, отличающийся тем, что определение относительного угла (5) рыскания осуществляют путем обнаружения положений передней и задней кромок (13, 8) прицепа/полуприцепа (3).
7. Способ по п. 1, отличающийся тем,
что информацией является относительный угол (19) поперечных колебаний прицепа/полуприцепа (3) вокруг продольной оси и его определяют таким образом,
что если смотреть в продольном направлении (х) автомобиля, заднюю и/или переднюю вертикальную наружную кромку (8) прицепа/полуприцепа (3) регистрируют с каждой из сторон автомобиля по меньшей мере одной камерой (7), направленной назад, если смотреть в продольном направлении (х) автомобиля,
что определяют вертикаль (17) к земной поверхности (18) и
что в результате анализа угла актуальный относительный угол (19) поперечных колебаний вокруг продольной оси определяют как угол между вертикалью (17) и задней и/или передней вертикальной наружной кромкой (8) прицепа/полуприцепа (3).
8. Способ по п. 7, отличающийся тем,
что по известному положению установки и направлению камеры (6, 7), установленной на автомобиле-тягаче (2), в частности на кабине водителя, определяют положение вертикали (17) к земной поверхности (18), причем при необходимости устанавливают и учитывают с поправкой поперечные колебания кабины водителя вокруг продольной оси, и/или
что определяют земную поверхность (18), в частности, посредством стереокамеры.
9. Способ по п. 1, отличающийся тем,
что информацией являются останов автомобиля и/или незначительная скорость качения и его/их при необходимости в сочетании с направлением движения определяют таким образом, что по изображению (10, 15) с камеры с помощью устройства обработки изображений, в частности, распознают оптический поток, относительное движение или останов между автопоездом (1) с автомобилем общего назначения и зарегистрированным фоном, в частности дорожным полотном (18), и определенное состояние используют в системе поддержки водителя.
10. Способ по п. 9, отличающийся тем, что при определении относительного движения путем анализа векторов движения оптического потока извлекают направление движения автопоезда с автомобилем общего назначения (вперед или назад).
11. Система поддержки водителя для определения состояний динамики движения автомобиля общего назначения,
отличающаяся тем,
что по изображению (10, 15) по меньшей мере с одной камеры (6, 7) автомобиля общего назначения, ориентированной, в частности, в продольном направлении (х) автомобиля, с помощью устройства обработки изображений извлекается информация о динамике движения: угол (5) отклонения между прицепом/полуприцепом (3) и автомобилем-тягачом (2) автопоезда (1) с автомобилем общего назначения, относительный угол (19) поперечных колебаний прицепа/полуприцепа (3) вокруг продольной оси и информация об останове автомобиля, причем на автомобиле-тягаче (2) автопоезда (1) с автомобилем общего пользования установлена по меньшей мере одна камера (6, 7) на продольной стороне кабины водителя.
12. Система поддержки водителя по п. 11, отличающаяся тем,
что информацией является относительный угол рыскания как угол (5) отклонения между автомобилем-тягачом (2) и прицепом/полуприцепом (3) и он определяется таким образом,
что передняя и/или задняя вертикальная наружная кромка (13, 8) прицепа/полуприцепа (3), если смотреть в продольном направлении (х) автомобиля, регистрируется с каждой из сторон автомобиля по меньшей мере одной камерой (6, 7), направленной назад, если смотреть в продольном направлении (х) автомобиля,
что актуальное положение передней и/или задней вертикальной наружной кромки (13, 8), в частности величина бокового участка (16, 12) смещения относительно положения кромок (13′, 8′), если смотреть в поперечном направлении (y) автомобиля, определяется при продольно направленном положении автопоезда,
что по актуальному положению кромок (13, 8) и по неизменным геометрическим параметрам, в частности по положению центра (4) поворота прицепа/полуприцепа и по ширине прицепа/полуприцепа, относительный угол рыскания между автомобилем-тягачом (2) и прицепом-полуприцепом (3) рассчитывается как угол (5) отклонения.
13. Система поддержки водителя по п. 11, отличающаяся тем, что информацией является относительный угол (19) поперечных колебаний прицепа/полуприцепа (3) вокруг продольной оси и он определяется таким образом,
что задняя и/или передняя вертикальная наружная кромка (8) прицепа/полуприцепа (3), если смотреть в продольном направлении (х) автомобиля, регистрируется с каждой из сторон автомобиля по меньшей мере одной камерой (7), направленной назад, если смотреть в продольном направлении (х) автомобиля,
что определяется вертикаль (17) к земной поверхности (18),
что в результате анализа угла актуальный относительный угол (19) поперечных колебаний прицепа/полуприцепа вокруг продольной оси определяется как угол между вертикалью (17) и задней и/или передней вертикальной наружной кромкой (8) прицепа/полуприцепа (3).
14. Система поддержки водителя по п. 13, отличающаяся тем,
что тем самым по известному положению установки и направлению камеры (6, 7), установленной на автомобиле-тягаче (2), в частности на кабине водителя, определяется положение вертикали (17) к земной поверхности (18), причем при необходимости устанавливаются и учитываются с поправкой поперечные колебания кабины водителя вокруг продольной оси, и/или
что посредством стереокамеры определяется земная поверхность (18).
15. Система поддержки водителя по п. 11, отличающаяся тем,
что информацией являются останов автомобиля и/или незначительная скорость качения и что он/они при необходимости в сочетании с направлением движения определяются таким образом, что по изображению (10, 15) на камере с помощью устройства для обработки изображений, в частности, распознаются оптический поток, относительное движение или остановка между автопоездом (1) с автомобилем общего назначения и зарегистрированным фоном, в частности дорожным полотном (18), и/или
что при определении относительного движении путем анализа векторов движения оптического потока извлекается направление движения автопоезда с автомобилем общего назначения (вперед или назад).
16. Автомобиль, в частности автомобиль общего назначения, для осуществления способа по одному из пп. 1-10 и/или с системой поддержки водителя по одному из пп. 11-15.
| US 2013027195 A1, 31.01.2013 | |||
| WO 2013187825 A1, 19.12.2013 | |||
| DE 102005042957 A1, 22.03.2007 | |||
| DE 102011114977 A1, 10.01.2013. |

