ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к способу помощи при вождении и системе помощи при вождении.
УРОВЕНЬ ТЕХНИКИ
[0002] JP 2018-151765 A раскрывает устройство помощи при визуальном распознавании, которое выдает предупреждение, когда водитель визуально не наблюдает за частью, подлежащей контролю, в течение заданного времени. Устройство обнаруживает объект, присутствующий вокруг транспортного средства, посредством внешней камеры транспортного средства, определяет тип обнаруженного объекта и обнаруживает визуальное состояние водителя посредством внутренней камеры транспортного средства. Затем на основе типа объекта и визуального состояния водителя устройство определяет, является ли визуальное наблюдение за водителем соотвествующим, и выдает предупреждение при определении того, что визуальное наблюдение за водителем является несоответсвующем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Тем не менее, трудно определить, необходимо ли предупреждение, путем обнаружения части, за которой должна визуально наблюдать внешняя камера транспортного средства, и визуальной части водителя посредством внутренней камеры транспортного средства, чтобы определить, является ли визуальный наблюдение соответсвующим. Кроме того, если необходимость в предупреждении определяется только ориентацией лица или глаз водителя, обнаруженной внутренней камерой транспортного средства, может быть выдано ненужное предупреждение.
[0004] Принимая во внимание вышеупомянутые проблемы, цель настоящего изобретения состоит в том, чтобы обеспечить способ помощи при вождении и систему помощи при вождении, способную уменьшить количество ненужных предупреждений простым способом.
[0005] Согласно аспекту настоящего изобретения обеспечивается способ помощи при вождении, заключающийся в получении контроллером информации о состоянии водителя во время движения с автономным вождением и выдачи предупреждения водителю, когда контроллер определяет, что водитель не обращен вперед на основании информации о состоянии водителя. В способе помощи при вождении предупреждение запрещено, когда водитель обращен в направлении смены полосы движения во время движения с автономным вождением.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] ФИГ. 1 - схематическая диаграмма конфигурации системы помощи при вождении согласно настоящему варианту осуществления изобретения.
ФИГ. 2 - блок-схема, иллюстрирующая управление скоростью транспортного средства согласно настоящему варианту осуществления изобретения.
ФИГ. 3 - блок-схема, иллюстрирующая управление удержанием центра полосы движения согласно настоящему варианту осуществления изобретения.
ФИГ. 4 - схема, иллюстрирующая управление сменой полосы движения, запущенное посредством работы указателя поворота, осуществляемой водителем в качестве триггера.
ФИГ. 5 - блок-схема, иллюстрирующая управление сменой полосы движения, запущенное посредством работы указателя поворота, осуществляемой водителем в качестве триггера.
ФИГ. 6 - схема, иллюстрирующая управление сменой полосы движения на основе функции помощи при обгоне.
ФИГ. 7 - блок-схема, иллюстрирующая управление сменой полосы движения на основе функции помощи при обгоне.
ФИГ. 8 - схема, иллюстрирующая управление сменой полосы движения на основе функции помощи при движении по маршруту.
ФИГ. 9 - блок-схема, иллюстрирующая управление сменой полосы движения на основе функции помощи при движении по маршруту.
ФИГ. 10 - схема, иллюстрирующая пример экрана предупреждения сигнала о необходимости посмотреть вперёд.
ФИГ. 11 - блок-схема, иллюстрирующая управление операцией уведомления сигнала о необходимости посмотреть вперёд.
ФИГ. 12 - схема, иллюстрирующая пример экрана предупреждения для первичного сигнала ручного режима.
ФИГ. 13 - диаграмма, иллюстрирующая пример экрана предупреждения вторичного сигнала ручного режима.
ФИГ. 14 - блок-схема, иллюстрирующая управление операцией уведомления о сигнале ручного режима, которое запускается, когда режим переключается в ручной режим.
ФИГ. 15 является блок-схемой, иллюстрирующей управление операцией уведомления о ручном оповещении, которое запускается, когда сигнал о необходимости посмотреть вперёд, уведомляется в автоматическом режиме.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0007] В дальнейшем варианты осуществления настоящего изобретения описаны со ссылкой на чертежи и т.п.
[0008] (Первый вариант осуществления изобретения)
ФИГ. 1 представляет собой схематическую диаграмму конфигурации системы 100 помощи при вождении согласно первому варианту осуществления изобретения.
[0009] Как показано на фиг. 1, система 100 помощи при вождении согласно этому варианту осуществления изобретения включает в себя внешний датчик 1, внутренний датчик 2, навигационную систему 3, внутренее устройство 4 транспортного средства, устройство 5 представления, устройство ввода 6, привод 7 и контроллер 8. Система 100 помощи при вождении установлена на транспортном средстве (рассматриваемом транспортном средстве) 10, имеющем функцию автономного вождения.
[0010] Внешний датчик 1 представляет собой устройство обнаружения, которое обнаруживает внешнюю ситуацию, которая связана с информацией о рассматриваемом транспортном средстве 10. Внешний датчик 1 обнаруживает, например, другие транспортные средства вокруг рассматриваемого транспортного средства 10, маркер полосы движения, тип дороги (скоростная дорога, обычная дорога и т.п.) и т.п. Внешний датчик 1 включает в себя внешнюю камеру 11 транспортного средства и радар 12.
[0011] Внешняя камера 11 транспортного средства представляет собой устройство формирования изображения, которое отображает внешнюю ситуацию рассматриваемого транспортного средства 10 и получает информацию изображения о внешней ситуации рассматриваемого транспортного средства 10. Внешняя камера 11 транспортного средства представляет собой, например, камеры видеонаблюдения, обеспеченные на внешних сторонах транспортного средства на передней, задней, левой и правой дверях рассматриваемого транспортного средства 10, переднюю камеру, обеспеченную на внешней или внутренней стороне лобового стекла транспортного средства, и заднюю камеру, обеспеченную в задней части рассматриваемого транспортного средства 10.
[0012] Радар 12 обнаруживает объект за пределами рассматриваемого транспортного средства 10 посредством радиоволн. Радиоволны - это, например, миллиметровые волны. Более конкретно, радар 12 передает радиоволны в окружающую среду рассматриваемого транспортного средства 10 и принимает радиоволны, отраженные объектом, для обнаружения объекта. Радар 12 может получать, например, расстояние или направление до объекта в качестве информации об объекте.
[0013] Внешний датчик 1 выводит полученную информацию об окружающей среде (информацию изображения и информацию об объекте) рассматриваемого транспортного средства 10 на контроллер 8.
[0014] Внутренний датчик 2 - это устройство обнаружения, которое обнаруживает состояние водителя. Внутренний датчик 2 включает в себя камеру 21 наблюдения за водителем, датчик 22 касания и т.п.
[0015] Камера 21 наблюдения за водителем представляет собой блок монитора, который отображает состояние водителя и выполняет обработку изображения, и обнаруживает ориентацию лица и открытое/закрытое состояние глаз водителя во время движения. Камера 21 наблюдения за водителем представляет собой, например, блок инфракрасной камеры, установленный на приборной панели рассматриваемого транспортного средства 10, и включает в себя инфракрасную камеру 211, включающую в себя светодиод, излучающий инфракрасный свет, оптический фильтр, объектив и датчик изображения, и чип 212 обработки изображений.
[0016] Инфракрасная камера 211 отображает лицо водителя. Чип 212 обработки изображений извлекает органы (глаза, нос и рот) на лице водителя из изображения водителя инфракрасной камеры 211 путем сопоставления с образцом и определяет ориентацию лица водителя на основе размеров и позиционное отношение органов на лице. Чип 212 обработки изображений получает определенную ориентацию лица водителя в качестве информации распознавания лица. Кроме того, чип 212 обработки изображений определяет открытое/закрытое состояние глаз на основе изображения периферии глаз водителя, и получает информацию открытого/закрытого состояния в качестве информации распознавания лица.
[0017] Датчик 22 касания представляет собой устройство обнаружения (блок обнаружения), которое обнаруживает, что водитель держит руки на ручке. Датчик 22 касания обеспечен на ручке и обнаруживает, что водитель держит руки на ручке, посредством датчика емкости. Датчик 22 касания получает в качестве информации о захвате ручки, обнаружено или нет, что водитель держит руки на ручке.
[0018] Кроме того, внутренний датчик 2 может включать в себя, например, датчик сиденья, который обнаруживает, что водитель сидит на сиденье, с датчиком веса и датчиком ремня безопасности, который обнаруживает, что ремень безопасности заблокирован.
[0019] Внутренний датчик 2 выводит полученную информацию распознавания лиц и обрабатывает полученную информацию в контроллер 8 как информацию о состоянии водителя.
[0020] Навигационная система 3 представляет собой устройство, которое направляет водителя к пункту назначения, установленному водителем на карте или т.п. Навигационная система 3 включает в себя устройство 31 определения местоположения рассматриваемого транспортного средства, дисплей 32, динамик 33 и т.п.
[0021] Устройство 31 определения местоположения рассматриваемого транспортного средства является устройством, которое получает информацию о местоположении рассматриваемого транспортного средства 10, и включает в себя приемник 311 GPS (GNSS), гироскопический датчик 312, датчик 313 скорости транспортного средства и т.п. Приемник 311 GPS периодически принимает сигнал (данные GPS), передаваемый со спутника GPS. Гироскопический датчик 312 определяет направление рассматриваемого транспортного средства 10. Датчик 313 скорости транспортного средства определяет скорость транспортного средства 10 рассматриваемого транспортного средства.
[0022] Устройство 31 определения местоположения рассматриваемого транспортного средства выводит принятые данные GPS и обнаруженное направление и скорость транспортного средства рассматриваемого транспортного средства 10 в контроллер 8 в качестве информации о местоположении рассматриваемого транспортного средства 10. Контроллер 8 постоянно определяет правильное текущее положение, скорость транспортного средства и направление движения рассматриваемого транспортного средства 10 на основе принятой информации о местоположении рассматриваемого транспортного средства 10. Кроме того, контроллер 8 вычисляет целевой маршрут к месту назначения рассматриваемого транспортного средства 10 на основе текущего положения и направления движения рассматриваемого транспортного средства 10 и информации карты базы данных карт (не проиллюстрировано). Вычисленный целевой маршрут передается на дисплей 32 и динамик 33 в качестве навигационной информации. База данных карт включает в себя информацию об ограничении скорости дороги, и навигационная система 3 получает информацию об ограничении скорости дороги, по которой движется рассматриваемое транспортное средство 10, и выводит информацию на контроллер 8.
[0023] Дисплей 32 и динамик 33 являются устройствами, которые уведомляют водителя об информации о целевом маршруте. Дисплей 32 отображает информацию о целевом маршруте на основе навигационной информации от контроллера 8. Динамик 33 выводит информацию о целевом маршруте голосом на основе навигационной информации от контроллера 8.
[0024] Навигационная система 3 может использовать информацию, хранящуюся в компьютере объекта вне транспортного средства, такого как центр обработки информации, способный связываться с рассматриваемым транспортным средством 10. Например, навигационная система 3 может получать в качестве навигационной информации информацию о заторах, указывающую на заторы на дороге и информацию об ограничении скорости дороги, от компьютера объекта посредством связи. Обработка, выполняемая навигационной системой 3, может распределяться и выполняться компьютером, установленным на рассматриваемом транспортном средстве 10, и компьютером вне транспортного средства.
[0025] Внутреннее устройство 4 транспортного средства включает в себя различные устройства, установленные на транспортном средстве, и работает под управлением водителя. Внутреннее устройство 4 транспортного средства включает в себя колесо (ручку) 41 рулевого управления, педаль 42 акселератора, педаль 43 тормоза и т.п. Когда внутренним устройством 4 транспортного средства управляет водитель, информация о его работе выводится на контроллер 8. Когда контроллер 8 принимает рабочую информацию от внутреннего устройства 4 транспортного средства, контроллер 8 передает команду на основе рабочей информации исполнительному механизму 7, описанному ниже, и исполнительный механизм 7 выполняет управление движением рассматриваемого транспортного средства 10 на основе команды от контроллера 8.
[0026] Внутреннее устройство 4 транспортного средства дополнительно включает в себя такие устройства, как указатель 44 поворота, аудиоустройство, кондиционер, переключатель громкой связи, электрический стеклоподъемник, дворник, свет и звуковой сигнал. Когда этими устройствами управляет водитель, информация об их работе выводится на контроллер 8.
[0027] При автономном управлении вождением (управление помощью при вождении), описанном ниже, внутреннее устройство 4 транспортного средства, такое как указатель 44 поворота, может автоматически приводиться в действие и останавливаться в соответствии с командой от контроллера 8 независимо от работы водителя.
[0028] Устройство 5 представления представляет собой устройство, которое уведомляет водителя о различной информации уведомления на основе управления контроллера 8, который будет описан позже. Устройство 5 представления включает в себя дисплей 51 приборной панели, проекционный дисплей 52, динамик 53 и т.п.
[0029] Дисплей 51 приборной панели является устройством отображения, встроенным в блок приборной панели, и отображает различную информацию уведомления для водителя. Информация уведомления включает в себя информацию о состоянии движения транспортного средства и информацию предупреждения. В качестве информации о состоянии движения транспортного средства, отображается, например, скорость транспортного средства, стоимость топлива и пройденное расстояние рассматриваемого транспортного средства 10, включение/выключение автономного управления вождением, тип режима управления движением, знак ограничения скорости, ситуация других транспортных средств вокруг рассматриваемого транспортного средства 10 и информация о полосе движения в непосредственной близости от рассматриваемого транспортного средства 10. В качестве информации предупреждения отображаются, например, сигнал о необходимости посмотреть вперёд, сигнал ручного режима и сигнал о приближении, сигнал о необходимости посмотреть вперёд, отображается, когда определено, что водитель не смотрит вперед. Сигнал ручного режима отображается, когда обнаруживается, что водитель убирает руки с ручки в рабочем режиме, описанном ниже. Сигнал о приближении отображается, когда определено, что существует риск столкновения с другим транспортным средством впереди. Подробности информации предупреждения будут описаны позже.
[0030] Проекционный дисплей 52 представляет собой устройство отображения, которое отображает различную информацию уведомления для водителя на лобовом стекле. Информация уведомления включает в себя информацию о состоянии движения транспортного средства и информацию предупреждения. Проекционный дисплей 52 более простым образом отображает информацию, аналогичную отображаемой на дисплее 51 приборной панели.
[0031] Динамик 53 является устройством уведомления, которое выводит различную информацию уведомления водителю голосом. Динамик 53 уведомляет водителя об смене полосы движения или различной информации предупреждения во время движения с автономным вождением, например, голосом.
[0032] Устройство 6 ввода представляет собой переключатель, управляемый водителем, и обеспечен, например, в положении на колесе рулевого управления, где водитель может легко управлять устройством 6 ввода. Устройство 6 ввода включает в себя главный переключатель 61, переключатель 62 установки/движения по инерции, переключатель 63 возобновления/ускорения, переключатель 64 отмены, переключатель 65 помощи при ограничении скорости, переключатель 66 регулировки расстояния между транспортными средствами, переключатель 67 помощи при смене полосы движения, переключатель 68 управления рулевым управлением и т.п.
[0033] Главный переключатель 61 представляет собой селекторный переключатель, который включает/выключает питание системы 100 помощи при вождении.
[0034] Переключатель 62 установки/движения по инерции является переключателем, который запускает управление скоростью транспортного средства и снижает заданную скорость транспортного средства.
[0035] Переключатель 63 возобновления/ускорения является переключателем, который имеет как операцию возобновления, заключающуюся в возобновлении работы на установленной скорости транспортного средства перед отпусканием, так и операцию ускорения, заключающуюся в увеличении установленной скорости транспортного средства после того, как управление скоростью транспортного средства разблокировано.
[0036] Переключатель 64 отмены является переключателем, который освобождает операции различных типов управления, связанных с автономным вождением, таких как управление скоростью транспортного средства и управление рулевым управлением.
[0037] Переключатель 65 помощи при ограничении скорости представляет собой переключатель, который автоматически устанавливает целевую скорость транспортного средства на ограничение скорости во время операции управления скоростью транспортного средства.
[0038] Переключатель 66 регулировки расстояния между транспортными средствами является переключателем, который изменяет расстояние между транспортными средствами (целевое расстояние между транспортными средствами) до предыдущего транспортного средства во время операции управления скоростью транспортного средства.
[0039] Переключатель 67 помощи при смене полосы движения является переключателем, который позволяет водителю выполнять смену полосы движения, когда система 100 помощи при вождении определяет, что смена полосы движения рассматриваемого транспортного средства 10 необходима во время рулевого управления, и делает уведомление для подсказки водителю сменить полосу движения посредством устройства 5 представления.
[0040] Переключатель 68 управления рулевым управлением представляет собой, например, сенсорную панель на экране дисплея 32 в навигационной системе 3 и является селекторным переключателем, который включает/выключает функцию управления рулевым управлением.
[0041] Управление скоростью транспортного средства и управление рулевым управлением будут описаны позже.
[0042] Устройство 6 ввода может быть устройством, таким как дисковый переключатель или микрофон, способный вводить команду голосом водителя, в дополнение к переключателю нажимного типа, способному вводить команду ручным управлением водителя, сенсорная панель, расположенная на экране дисплея, или тому подобное.
[0043] Информация (входная информация), вводимая в устройство 6 ввода, выводится на контроллер 8.
[0044] Привод 7 представляет собой устройство, которое выполняет управление движением рассматриваемого транспортного средства 10 на основе команды от контроллера 8. Привод 7 включает в себя привод 71 приведения в движение, тормозной привод 72, привод 73 рулевого управления и т.п.
[0045] Привод 71 привода представляет собой устройство, которое регулирует движущую силу рассматриваемого транспортного средства 10.
[0046] В частности, когда рассматриваемое транспортное средство 10 представляет собой транспортное средство с двигателем внутреннего сгорания, оснащенное двигателем в качестве источника привода для движения, привод 71 приведения в движениевключает в себя привод дроссельной заслонки, который регулирует количество воздуха, подаваемого в двигатель (отверстие дроссельной заслонки), и клапан впрыска топлива, который регулирует количество топлива, подаваемого в двигатель (количество впрыскиваемого топлива).
[0047] Кроме того, когда рассматриваемое транспортное средство 10 является гибридным транспортным средством или электрическим транспортным средством, оснащенным двигателем в качестве источника движения, привод 71 приведения в движениевключает в себя схему (инвертор, преобразователь и т.п.), способную регулировать электрическую мощность, подаваемую на двигатель.
[0048] Тормозной привод 72 представляет собой устройство, которое приводит в действие тормозную систему в ответ на команду от контроллера 8, чтобы отрегулировать тормозное усилие, прилагаемое к колесам рассматриваемого транспортного средства 10. Тормозной привод 72 включает в себя гидравлический тормоз или рекуперативный тормоз.
[0049] Привод 73 рулевого управления включает в себя вспомогательный двигатель, который управляет крутящим моментом рулевого управления в системе рулевого управления с электроусилителем и т.п. Контроллер 8 управляет работой привода 73 рулевого управления для управления работой колес, тем самым выполняя рулевое управление рассматриваемого транспортного средства 10, описанное ниже.
[0050] Контроллер 8 включает в себя компьютер, оборудованный центральным процессором (CPU, central processing unit), постоянным запоминающим устройством (ROM, read-only memory), оперативной памятью (RΑM, random access memory) и интерфейсом ввода/вывода (I/O interface). Контроллер 8 выполняет специальную программу для выполнения обработки для реализации управления автономным вождением (управления помощью при вождении) настоящего варианта осуществления изобретения. Например, контроллер 8 выполняет управление скоростью транспортного средства, управление рулевым управлением, управление операциями уведомления о различных сигналах и т.п., которые будут описаны ниже. Контроллер 8 может быть сконфигурирован с одним компьютером или с множеством компьютеров.
[0051] Контроллер 8 выполнен с возможностью передачи различных сигналов с внешним датчиком 1, внутренним датчиком 2, навигационной системой 3, внутренним устройством 4 транспортного средства, устройством 5 представления и устройством 6 ввода. Контроллер 8 принимает различные типы информации, полученной внешним датчиком 1, внутренним датчиком 2 и навигационной системой 3, рабочую информацию от внутреннего устройства 4 транспортного средства и входную информацию от устройства 6 ввода. Затем контроллер 8 запрограммирован на получение этих частей информации в качестве информации о движении рассматриваемого транспортного средства 10 и надлежащее управление приводом 7 на основе информации о движении для выполнения управления помощью при вождении согласно настоящему варианту осуществления изобретения.
[0052] Далее будет описано автономное управление вождением (управление помощью при вождении) и управление операциями уведомления о различных сигналах, обеспечиваемых в систему 100 помощи при вождении, согласно настоящему варианту осуществления изобретения.
[0053] Автономное управление вождением (управление помощью при вождении), обеспеченное в системе 100 помощи при вождении, включает в себя функцию управления скоростью транспортного средства и функцию управления рулевым управлением.
[0054] Функция управления скоростью транспортного средства является функцией управления скоростью движения транспортного средства, так что скорость движения транспортного средства становится целевым значением. При управлении скоростью транспортного средства, когда перед рассматриваемым транспортным средством 10 нет других транспортных средств, управление выполняется таким образом, чтобы поддерживать заданную целевую скорость транспортного средства. С другой стороны, когда транспортное средство находится впереди рассматриваемого транспортного средства 10, управление выполняется таким образом, что расстояние между транспортными средствами поддерживается постоянным с целевой скоростью транспортного средства в качестве верхнего предела.
[0055] Кроме того, функция управления скоростью транспортного средства включает в себя функцию автоматической установки допустимой скорости в качестве целевой скорости транспортного средства.
[0056] Фиг. 2 - блок-схема, показывающая управление скоростью транспортного средства согласно настоящему варианту осуществления изобретения. Следующее управление скоростью транспортного средства повторно выполняется контроллером 8.
[0057] Во время управления скоростью транспортного средства, описанного ниже, водитель может изменить целевую скорость транспортного средства в любое время, используя переключатель 62 установки/движения по инерции или переключатель 63 возобновления/ускорения. Кроме того, водитель может в любой момент остановиться, автоматически установив ограничение скорости на целевую скорость транспортного средства, выключив переключатель 65 помощи ограничения скорости. Кроме того, водитель может остановить управление скоростью транспортного средства в любое время, переключив главный переключатель 61 в положение «ВЫКЛ», нажав переключатель 64 отмены или нажав педаль 43 тормоза.
[0058] Управление скоростью транспортного средства - это управление, которое выполняется, когда работает система 100 помощи при вождении. Когда главный выключатель 61 устройства 6 ввода включен, команда запуска системы 100 помощи при вождении передается на контроллер 8. После получения команды пуска контроллер 8 активирует систему 100 помощи при вождении.
[0059] Когда переключатель 62 установки/движения по инерции нажимается водителем во время работы системы 100 помощи при вождении, на контроллер 8 передается команда запуска для управления скоростью транспортного средства. После приема команды запуска управления скоростью транспортного средства контроллер 8 запускает управление скоростью транспортного средства.
[0060] Когда управление скоростью транспортного средства начинается, на этапе S110 контроллер 8 определяет, обнаруживает ли навигационная система 3 ограничение скорости дороги, по которой движется рассматриваемое транспортное средство 10, и включен ли переключатель 65 помощи при ограничении скорости. Когда ограничение скорости обнаружено навигационной системой 3 и переключатель 65 помощи ограничения скорости включен, контроллер 8 переходит к обработке этапа S120.
[0061] Ограничение скорости дороги, по которой движется рассматриваемое транспортное средство 10, может быть обнаружено путем изображения знака ограничения скорости внешним датчиком 1.
[0062] На этапе S120 контроллер 8 устанавливает обнаруженное ограничение скорости в качестве целевой скорости транспортного средства.
[0063] С другой стороны, на этапе S110, когда ограничение скорости не обнаружено или переключатель 65 помощи ограничения скорости находится в положении ВЫКЛ, контроллер 8 переходит к обработке этапа S121.
[0064] На этапе S121 контроллер 8 устанавливает в качестве целевой скорости транспортного средства скорость транспортного средства, когда переключатель 62 установки/движения по инерции нажат для запуска управления скоростью транспортного средства.
[0065] Когда целевая скорость транспортного средства устанавливается на этапе S120 или S121, на этапе S130 контроллер 8 управляет приводом 7 таким образом, что скорость транспортного средства рассматриваемого транспортного средства 10 становится установленной целевой скоростью транспортного средства.
[0066] Затем, на этапе S140, контроллер 8 определяет, есть ли другое транспортное средство перед рассматриваемым транспортным средством 10, на основе информации об окружающей среде рассматриваемого транспортного средства 10, полученной внешним датчиком 1.
[0067] Когда контроллер 8 определяет, что перед рассматриваемым транспортным средством 10 нет других транспортных средств на этапе S140, на этапе S150 контроллер 8 управляет приводом 7, чтобы поддерживать скорость транспортного средства рассматриваемого транспортного средства 10 на установленной целевой скорости транспортного средства.
[0068] С другой стороны, когда контроллер 8 определяет, что есть другое транспортное средство перед рассматриваемым транспортным средством 10 на этапе S140, контроллер 8 переходит к обработке этапа S151. На этапе S151 контроллер 8 управляет приводом 7 таким образом, чтобы расстояние между транспортными средствами поддерживалось постоянным с установленной целевой скоростью транспортного средства в качестве верхнего предела.
[0069] После выполнения обработки на этапе S150 или S151 контроллер 8 снова возвращается к этапу S110. На этапе S110, когда ограничение скорости не обнаружено или переключатель 65 помощи при ограничении скорости выключен, контроллер 8 переходит к обработке этапа S121. В этом случае, поскольку целевая скорость транспортного средства уже установлена, контроллер 8 поддерживает заданную целевую скорость транспортного средства.
[0070] Контроллер 8 отображает информацию, например, выполняется ли управление скоростью транспортного средства, целевая скорость транспортного средства и ограничение скорости на дисплее 51 приборной панели и проекционном дисплее 52 устройства 5 представления. Кроме того, например, когда целевая скорость транспортного средства изменяется или когда обнаруживается новое ограничение скорости, контроллер 8 может быть настроен так, чтобы уведомлять водителя об информации посредством символьного дисплея на дисплее 51 приборной панели и проекционного дисплея 52 или голосом из динамика 53.
[0071] Далее будет описана функция управления рулевым управлением. Функция рулевого управления настоящего варианта осуществления изобретения включает в себя функцию помощи при удержании центра полосы движения и функцию помощи при смене полосы движения.
[0072] Функция помощи при удержании центра полосы движения представляет собой функцию управления рулевым управлением, так что рассматриваемое транспортное средство 10 движется вблизи центра полосы движения, и помогает водителю в управлении ручкой. Управление удержанием центра полосы движения запускается путем переключения переключателя 68 управления рулевым управлением с сенсорной панелью навигационной системы 3 в положение ВКЛ, когда выполняется управление скоростью транспортного средства. Управление удержанием центра полосы движения запускается в состоянии (ручной режим), когда водитель держит руки на ручке, и когда заданное условие удовлетворяется, водитель может освободить руки от ручки (автоматический режим).
[0073] Фиг. 3 - блок-схема, иллюстрирующая управление удержанием центра полосы движения согласно настоящему варианту осуществления изобретения. Следующее управление удержанием центра полосы движения повторно выполняется контроллером 8.
[0074] Во время управления удержанием центра полосы движения, описанного ниже, водитель может остановить управление удержанием центра полосы движения в любое время, переключив переключатель 68 управления рулевым управлением в положение ВЫКЛ. Кроме того, водитель может остановить управление удержанием центра полосы движения и управление скоростью транспортного средства в любое время, переключив главный переключатель 61 в положение ВЫКЛ, нажав переключатель 64 отмены или нажав педаль 43 тормоза.
[0075] Когда переключатель 68 управления рулевым управлением перключается водителем в положение ВКЛ во время работы функции управления скоростью транспортного средства, на контроллер 8 передается команда запуска управления удержанием середины полосы движения. После получения команды пуска контроллер 8 запускает управление удержанием центра полосы движения.
[0076] Когда запускается управление удержанием середины полосы движения, контроллер 8 отображает, что управление рулевым управлением задействовано, на дисплее 51 приборной панели и проекционном дисплее 52 устройства 5 представления.
[0077] Затем, на этапе S210, контроллер 8 получает информацию о движении рассматриваемого транспортного средства 10 и определяет, удовлетворяются ли рабочие условия функции помощи при удержании центра полосы движения, на основе полученной информации о движении. В частности, например, контроллер 8 определяет, удовлетворены ли все следующие условия.
(1) Обнаружены маркеры полосы движения с обеих сторон.
(2) Водитель держит руки на ручке.
(3) Транспортное средство движется вблизи центра полосы движения.
(4) Указатель поворота не работает.
(5) Стеклоочиститель не работает на высокой скорости.
(6) При наличии высокоточной карты впереди на заданном расстоянии (например, около 200 м) нет съездов, съездов со скоростных автомагистралей, стыков, перекрестков и точек сокращения полосы движения.
Когда все эти условия удовлетворены, контроллер 8 на этапе S220 задействует функцию помощи при удержании центра полосы движения. С другой стороны, пока все вышеупомянутые условия не будут удовлетворены, контроллер 8 не будет задействовать функцию помощи при удержании центра полосы движения.
[0078] Рабочие условия функции помощи при удержании центра полосы движения являются примерами, не ограничиваются этими условиями и могут быть надлежащим образом установлены для работы функции помощи при удержании центра полосы движения, если определенные заданные условия удовлетворяются в зависимости от ситуации.
[0079] На этапе S220 задействуется функция помощи при удержании центра полосы движения, и работа привода 73 рулевого управления управляется таким образом, что рассматриваемое транспортное средство 10 движется по центру полосы движения. Кроме того, контроллер 8 управляет функцией помощи при удержании центра полосы движения и уведомляет посредством дисплея 51 приборной панели и проекционного дисплея 52 устройства 5 представления, чтобы водитель поддерживал состояние удерживания рук на ручке. То есть водитель уведомляется о ручном режиме, в котором помощь при вождении (автономное вождение) выполняется в состоянии, когда водитель держит руки на ручке.
[0080] Затем, на этапе S230, контроллер 8 определяет, удовлетворяются ли условия автоматического режима, при которых водитель может освободить руки от ручки, на основе информации о движении рассматриваемого транспортного средства 10. В частности, например, контроллер 8 определяет, удовлетворены ли все следующие условия.
(1) Транспортное средство движется по скоростной автомагистрали.
(2) Транспортное средство движется по дороге, конструктивно отделенной от встречной полосы.
(3) Транспортное средство движется по дороге с высокоточной картой.
(4) Транспортное средство движется со скоростью транспортного средства, равной или ниже установленного скоростного ограничения.
(5) Сигнал приема приемника GPS (GNSS) 311 действителен.
(6) Водитель держит руки на ручке.
(7) Водитель обращен вперед.
(8) В пределах заданного расстояния (например, 800 м) впереди нет съездов, съездов со скоростных автомагистралей, стыков, перекрестков и точек сокращения полосы движения.
(9) На заданном расстоянии (например, 500 м) впереди нет резкой кривой (например, радиус кривизны R составляет 100 м или меньше).
(10) Транспортное средство не движется по туннелю (например, на участке, превышающем 500 м от входа в туннель).
(11) Педаль акселератора не нажата.
Когда все эти условия удовлетворены, контроллер 8 переходит к обработке этапа S240.
[0081] С другой стороны, когда любое из условий автоматического режима не удовлетворяется, контроллер 8 возвращается к этапу S210. Когда на этапе S210 удовлетворяются рабочие условия функции помощи при удержании центра полосы движения, контроллер 8 продолжает управлять функцией помощи при удержании центра полосы движения и уведомляет ручной режим на этапе S220. Когда рабочие условия функции помощи при удержании центра полосы движения не удовлетворяются на этапе S210, контроллер 8 останавливает работу функции помощи при удержании центра полосы движения до тех пор, пока не будут удовлетворены рабочие условия функции помощи при удержании центра полосы движения.
[0082] Когда условия автоматического режима удовлетворены, на этапе S240 контроллер 8 уведомляет водителя о том, что руки могут быть освобождены от ручки, посредством дисплея 51 приборной панели и проекционного дисплея 52 устройства 5 представления. То есть водитель уведомляется о том, что режим переключается в автоматический режим, в котором помощь при вождении (автономное вождение) выполняется в состоянии, когда водитель отпускает руки с ручки.
[0083] Условия автоматического режима являются примерами, не ограничиваются этими условиями и могут быть соответствующим образом установлены, чтобы переключаться в автоматический режим , если определенные заданные условия удовлетворяются в зависимости от ситуации.
[0084] На этапе S250, основываясь на информации о движении, контроллер 8 определяет, удовлетворяются ли условия отключения автоматического режима для переключения из автоматического режима в ручной режим. В частности, например, контроллер 8 определяет, удовлетворяется ли какое-либо из следующих условий.
(1) Транспортное средство движется по дороге, отличной от скоростной.
(2) Транспортное средство движется на участке с двусторонним движением.
(3) Транспортное средство движется по дороге без высокоточной карты.
(4) Транспортное средство движется со скоростью транспортного средства, превышающей скоростное ограничение.
(5) Приемник 311 GPS (GNSS) не может принимать сигнал.
(6) После выдачи сигнала о необходимости посмотреть вперёд,, водитель не обращен вперед в течение заданного времени (например, 5 секунд).
(7) Водитель не может быть обнаружен камерой 21 наблюдения водителя.
(8) Впереди на заданном расстоянии (например, 800 м) находятся любые из следующего: съезды, съезды со скоростных автомагистралей, стыки, перекрестки и точки сокращения полосы движения.
(9) Когда транспортное средство движется со скоростью транспортного средства, меньшей, чем заданная скорость (например, около 40 км/ч), существует резкая кривая (например, радиус кривизны R составляет 100 м или меньше) в пределах заданного расстояния (например, 200 м) впереди.
(10) Когда транспортное средство движется со скоростью транспортного средства, равной или превышающей заданную скорость (например, около 40 км/ч), возникает резкая кривая (например, радиус кривизны R составляет 170 м или меньше). на заданное расстояние (например, 200 м) впереди .
(11) Транспортное средство движется по туннелю (например, на участке, превышающем 500 м от входа в туннель).
(12) Водитель держит ручку и нажимает на педаль акселератора.
(13) Выдается сигнал о приближении.
Когда любое из этих условий удовлетворяется, контроллер 8 выходит из ручного режима.
[0085] В (6) условий отключения автоматического режима здесь автоматический режим не отключается до тех пор, пока не истечет заданное время после того, как выдается сигнал о необходимости посмотреть вперёд. То есть, в условиях автоматического режимасостояние, когда водитель обращен вперед (7), устанавливается как условие переключения в автоматический режим , тогда как в условиях переключения автоматического режима, автоатический режим не отключается немедленно, даже если водитель не обращен вперед. В результате, например, можно предотвратить отключение автоматического режима, например, в случае, когда водитель просто проверяет правое и левое направления вместо отвлекаемого вождения.
[0086] Когда удовлетворяется любое из условий отключения автоматическогорежима, контроллер 8 отключает автоматический режим и возвращается к этапу S210. Когда на этапе S210 удовлетворяются рабочие условия функции помощи при удержании центра полосы движения, на этапе S220 контроллер 8 продолжает управлять функцией помощи при удержании центра полосы движения и уведомляет, что режим переключен на ручной режим. Когда рабочие условия функции помощи при удержании центра полосы движения не удовлетворяются на этапе S210, контроллер 8 останавливает работу функции помощи при удержании центра полосы движения до тех пор, пока не будут удовлетворены рабочие условия функции помощи при удержании центра полосы движения.
[0087] С другой стороны, когда условия отключения автоматического режима не удовлетворяются на этапе S250, контроллер 8 продолжает автоматический режим (этап S260) и возвращается к обработке на этапе S250. То есть контроллер 8 продолжает автоматический режим до тех пор, пока не будут удовлетворены условия отключения.
[0088] Условия отключения автоматического режима являются примерами, не ограничиваются этими условиями и могут быть надлежащим образом установлены, так что автоматический режим отключается, если удовлетворяются определенные заданные условия, в зависимости от ситуации.
[0089] Обработка с этапа S210 по этап S260 выполняется повторно, пока водитель не прекратит управление удержанием центра полосы движения.
[0090] Когда запускается управление удержанием центра полосы движения или когда ручной режим и режим автоматического выключения переключаются, водитель может быть уведомлен о запуске или переключении посредством символьного дисплея на дисплее 51 приборной панели и проекционного дисплея 52 или голосом из динамика 53.
[0091] Далее будет описана функция помощи при смене полосы движения.
[0092] Функция помощи при смене полосы движения - это функция управления рулевым управлением и помощи при смене полосы движения, когда водитель управляет указателем 44 поворота или когда система 100 помощи при вождении предлагает смену полосы движения, и водитель нажимает переключатель 67 помощи при смене полосы движения. Управление сменой полосы движения является одним из типов рулевого управления и представляет собой управление помощью при вождении (автономное вождение), которое выполняется в состоянии, когда водитель держит руки на ручке, то есть в ручном режиме.
[0093] Фиг. 4 - схема, иллюстрирующая управление сменой полосы движения, запущенное посредством работы указателя поворота, осуществляемой водителем в качестве триггера.
[0094] Как показано на фиг. 4, когда водитель включает указатель 44 поворота в момент времени t1 во время операции управления рулевым управлением, если заданное условие удовлетворяется, запускается процедура смены полосы движения (LCP, lane change procedure) и выполняется управление рулевым управлением.
[0095] После запуска LCP, когда заданное условие удовлетворяется, маневр смены полосы движения (LCM) запускается в момент времени t2 через несколько секунд после начала LCP, смена полосы движения выполняется, и LCM завершается в момент времени t3 в пределах нескольких секунд от начала LCM.
[0096] Указатель 44 поворота выключается автоматически или в результате действия водителя в момент времени t4 в течение нескольких секунд после завершения LCM, и LCP завершается.
[0097] Время от t1 (включение указателя поворота) до t2 (начало LCM) и t3 (завершение LCM) и время от t3 (завершение LCM) до t4 (выключение указателя поворота) предпочтительно составляют несколько секунд, но не ограничиваются этим и могут быть свободно установлены в зависимости от ситуации.
[0098] Фиг. 5 - блок-схема, иллюстрирующая управление сменой полосы движения, запущенное посредством работы указателя поворота, осуществляемой водителем в качестве триггера. Следующее управление сменой полосы движения выполняется контроллером 8.
[0099] Во время операции управления рулевым управлением (переключатель 68 управления рулевым управлением находится в положении ВКЛ), когда водитель приводит в действие указатель 44 поворота, на контроллер 8 передается команда запуска процедуры смены полосы движения (LCP).
[0100] Когда контроллер 8 принимает команду запуска LCP, на этапе S310 контроллер 8 определяет, удовлетворяются ли условия запуска LCP, на основе информации о движении рассматриваемого транспортного средства 10. В частности, например, контроллер 8 определяет, удовлетворены ли все следующие условия.
(1) После запуска LCP водитель держит руки на ручке в течение заданного времени (например, около 2 секунд).
(2) Скорость транспортного средства - это заданная скорость (например, около 60 км/ч) или выше.
(3) Транспортное средство не обнаружено в пункте назначения, в который транспортному средству необходимо перестроиться (есть свободное место в направлении смены полосы движения).
(4) В направлении смены полосы движения есть полоса движения.
(5) Маркер полосы движения в направлении смены полосы движения представляет собой прерывистую линию.
(6) Транспортное средство движется по прямой или по плавной кривой (например, радиус кривизны R составляет 250 м или более).
(7) Время находится в пределах заданного времени (например, в пределах около 1 секунды) после того, как водитель выполняет операцию указателя поворота.
Когда все эти условия удовлетворяются, на этапе S320 контроллер 8 запускает процедуру смены полосы движения (LCP).
[0101] С другой стороны, когда даже любое из условий запуска LCP не удовлетворяется, контроллер 8 останавливает процедуру смены полосы движения (LCP).
[0102] На этапе S320 контроллер 8 запускает процедуру смены полосы движения (LCP) и управляет работой привода 7 (в частности, привода 73 рулевого управления), чтобы помогать работе ручки, необходимой для смены полосы движения. Кроме того, контроллер 8 отображает информацию, такую как начало процедуры смены полосы движения (LCP) и направление смены полосы движения, на дисплее 51 приборной панели и проекционном дисплее 52 устройства 5 представления. В дополнение к отображению на дисплее 51 приборной панели и проекционному дисплею 52 водитель может быть уведомлен о начале процедуры смены полосы движения (LCP) голосом из динамика 53.
[0103] Условия запуска LCP являются примерами, не ограничиваются этими условиями и могут быть соответствующим образом установлены, так что LCP запускается, если определенные заданные условия удовлетворяются в зависимости от ситуации.
[0104] Затем, на этапе S330, контроллер 8 определяет, удовлетворяются ли условия остановки для смены полосы движения, на основе информации о движении рассматриваемого транспортного средства 10. В частности, например, контроллер 8 определяет, удовлетворяется ли какое-либо из следующих условий.
(1) После запуска LCP маневр по смене полосы движения (LCM) не может быть запущен в течение заданного времени (например, 5 секунд).
(2) После запуска LCP и перед запуском LCM скорость транспортного средства падает ниже заданной скорости (например, около 50 км/ч).
(3) После начала LCP и до начала LCM на соседней полосе нет места, необходимого для смены полосы движения.
(4) Перед началом LCM маркер полосы не обнаруживается.
(5) Перед началом LCM определяется, что в направлении смены полосы движения нет соседней полосы движения или что на определенном расстоянии впереди нет смежной полосы движения.
(6) Перед началом LCM определяется, что впереди на определенном расстоянии есть кривая, имеющая заданный радиус кривизны (например, радиус R кривизны составляет 250 м или меньше).
(7) Перед началом LCM определяется, что на определенном расстоянии впереди есть участок, на котором тип маркера полосы движения указывает, что смена полосы движения на соседнюю полосу движения в направлении смены полосы движения запрещена.
(8) Перед запуском LCM радар 12 обнаруживает экранирование, радиопомехи или осевое отклонение.
(9) Выдается сигнал ручного режима.
(10) Водитель выключает указатель поворота.
Когда любое из этих условий удовлетворяется, контроллер 8 останавливает управление помощью при смене полосы движения. Сигнал ручного режима выдается, когда водитель не держит руки на ручке в течение заданного времени (например, около 2 секунд) после запуска LCP.
[0105] С другой стороны, когда условия остановки для смены полосы движения не удовлетворяются, на этапе S340 контроллер 8 управляет работой привода 7 (в частности, привода 73 рулевого управления) для выполнения маневра по смене полосы движения (LCM) рассматриваемого транспортного средства 10.
[0106] По завершении LCM контроллер 8 выключает указатель 44 поворота на этапе S350. Когда указатель поворота 44 выключен, LCP заканчивается. Кроме того, указатель 44 поворота может быть выключен водителем.
[0107] Условия остановки для смены полосы движения являются примерами, не ограничиваются этими условиями и могут быть соответствующим образом установлены так, что смена полосы движения останавливается, если удовлетворяются определенные заданные условия, в зависимости от ситуации.
[0108] Далее будет описано управление сменой полосы движения, предлагаемое системой 100 помощи при вождении. Функция помощи при смене полосы движения, предлагаемая системой 100 помощи при вождении, включает в себя функцию помощи при обгоне для обгона транспортного средства, имеющего низкую скорость, и функцию помощи при движении по маршруту для движения по маршруту к пункту назначения. Функция помощи при обгоне - это функция управления рулевым управлением и помощи при операции обгона, когда впереди обнаруживается транспортное средство, скорость которого ниже установленной. Функция помощи при движении по маршруту - это функция управления рулевым управлением, когда водитель устанавливает пункт назначения, и помощь при смене полосы движения, необходимой для движения по маршруту.
[0109] Фиг. 6 - схема, иллюстрирующая управление сменой полосы движения на основе функции помощи при обгоне. Управление сменой полосы движения на основе функции помощи при обгоне запускается с предложением системы 100 помощи при вождении в качестве триггера, когда перед рассматриваемым транспортным средством 10 находится транспортное средство, имеющее скорость ниже установленной скорости.
[0110] Во время движения с автономным вождением (операция управления рулевым управлением), когда транспортное средство, имеющее скорость ниже установленной скорости, обнаруживается перед рассматриваемым транспортным средством 10, если заданное условие удовлетворяется, уведомление о подсказке водителю сменить полосу движения на полосу обгона производится устройством 5 представления в момент времени t1-1. После уведомления о смене полосы движения, когда водитель нажимает переключатель 67 помощи при смене полосы движения в момент времени t1-2 в течение заданного времени, указатель поворота 44 включается в момент времени t1-3 в течение нескольких секунд, и процедура (LCP) смены полосы движения запущена.
[0111] Когда LCP запускается, выполняется управление рулевым управлением, и если заданное условие удовлетворяется, маневр (LCM) смены полосы движения начинается в момент времени t1-4 в пределах нескольких секунд от начала LCP, и смена полосы движения на полосу обгона. В момент времени t1-5 в течение нескольких секунд после начала LCM маневр смены полосы движения (LCM) для смены полосы движения на полосу обгона завершается. В момент времени t1-6 в течение нескольких секунд после завершения LCM указатель 44 поворота выключается автоматически или в результате действия водителя, и LCP завершается.
[0112] Время от t1-2 (когда переключатель 67 помощи при смене полосы движения нажат) до t1-3 (включение указателя поворота), время от t1-3 (включение указателя поворота) до t1-4 ( запуск LCM) и t1-5 (завершение LCM), а время от t1-5 (завершение LCM) до t1-6 (выключение указателя поворота) предпочтительно составляет около нескольких секунд, но не ограничивается этим, и может быть свободно устанавливается в зависимости от ситуации.
[0113] Затем, когда рассматриваемое транспортное средство 10 обгоняет предыдущее транспортное средство, если заданное условие удовлетворяется, уведомление о побуждении водителя сменить полосу движения на полосу движения выполняется устройством 5 представления в момент времени t2-1. После уведомления о смене полосы движения, когда водитель нажимает переключатель 67 помощи при смене полосы движения в момент времени t2-2, указатель 44 поворота включается в момент времени t2-3 в течение нескольких секунд, и процедура смены полосы движения (LCP) запускается.
[0114] Когда LCP запускается, выполняется управление рулевым управлением, и, если заданное условие удовлетворяется, маневр смены полосы движения (LCM) начинается в момент времени t2-4 в пределах нескольких секунд от начала LCP, и смена полосы движения на полосу движения осуществляется. В момент времени t2-5 в течение нескольких секунд после начала LCM маневр смены полосы движения (LCM) на движущуюся полосу движения завершается. В момент времени t2-6 в течение нескольких секунд после завершения LCM указатель 44 поворота выключается автоматически или в результате действия водителя, и LCP завершается.
[0115] Время от t2-2 (когда переключатель 67 помощи при смене полосы движения нажат) до t2-3 (включение указателя поворота), время от t2-3 (включение указателя поворота) до t2-4 (запуск LCM) и t2-5 (завершение LCM), а время от t2-5 (завершение LCM) до t2-6 (выключение указателя поворота) предпочтительно составляет около нескольких секунд, но не ограничивается этим, и может быть свободно устанавливается в зависимости от ситуации.
[0116] Фиг. 7 - блок-схема, иллюстрирующая управление сменой полосы движения на основе функции помощи при обгоне. Следующее управление сменой полосы движения выполняется контроллером 8.
[0117] На этапе S401, во время операции управления рулевым управлением (в состоянии, когда переключатель 68 управления рулевым управлением включен), контроллер 8 определяет на основе информации о движении рассматриваемого транспортного средства 10, обнаружено ли транспортное средство, имеющее скорость ниже установленной скорости, перед рассматриваемым транспортным средством 10.
[0118] Когда транспортное средство, имеющее скорость ниже установленной скорости, обнаруживается перед рассматриваемым транспортным средством 10, на этапе S402 контроллер 8 определяет, удовлетворяются ли условия предложения смены полосы движения на полосу обгона на основе информации о движении рассматриваемого транспортного средства 10. В частности, например, контроллер 8 определяет, удовлетворены ли все следующие условия.
(1) Транспортное средство находится в автоматическом режиме.
(2) Скорость транспортного средства - это заданная скорость (например, около 60 км/ч) или выше.
(3) Есть место для смены полосы движения через 5 секунд.
(4) В направлении смены полосы движения есть полоса движения.
(5) Маркер полосы движения в направлении смены полосы движения представляет собой прерывистую линию.
(6) Транспортное средство движется по прямой или по плавной кривой (например, радиус кривизны R составляет 250 м или более).
(7) Скорость транспортного средства рассматриваемого транспортного средства 10 ниже заданной целевой скорости транспортного средства на заданную скорость (например, 5 км/ч) или более.
(8) Скорость транспортного средства предыдущего транспортного средства ниже заданной целевой скорости транспортного средства на заданную скорость (например, 10 км/ч) или более.
(9) Расстояние между транспортными средствами между рассматриваемым транспортным средством 10 и предшествующим транспортным средством меньше, чем расстояние между транспортными средствами, установленное на основе разницы скоростей (например, в случае, когда расстояние между транспортными средствами установлено на 50 м, когда рассматриваемое транспортное средство движется со скоростью 100 км/ч, а разница скоростей составляет 10 км/ч, или в случае, когда расстояние между транспортными средствами меньше 50 м, когда рассматриваемое транспортное средство движется со скоростью 100 км/ч и разница скоростей 10 км/ч.)
(10) Скорость предшествующего транспортного средства после смены полосы движения выше, чем скорость предыдущего транспортного средства на полосе движения, на заданную скорость (например, около 5 км/ч) или более.
Когда все эти условия выполнены, считается, что необходимо сменить полосу движения.
[0119] Предлагаемые условия смены полосы движения на полосу обгона являются примерами, не ограничиваются этими условиями и могут быть надлежащим образом заданы таким образом, что считается, что смена полосы движения необходима, если выполняются определенные заданные условия в зависимости от ситуации.
[0120] Когда все условия предложения о смене полосы движения на полосу обгона удовлетворяются, на этапе S403 контроллер 8 побуждает водителя сменить полосу движения путем уведомления устройства 5 представления.
[0121] Затем, на этапе S404, когда контроллер 8 обнаруживает, что переключатель 67 помощи при смене полосы движения нажат водителем, контроллер 8 переходит к обработке этапа S405. С другой стороны, если переключатель 67 помощи при смене полосы движения не нажат в течение заданного времени, контроллер 8 прекращает управление сменой полосы движения.
[0122] На этапе S405 контроллер 8 определяет, удовлетворяются ли условия начала процедуры смены полосы движения (LCP) на основе информации о движении рассматриваемого транспортного средства 10. В частности, например, контроллер 8 определяет, удовлетворены ли все следующие условия.
(1) Водитель держит руки на ручке в течение заданного времени после нажатия переключателя 67 помощи при смене полосы движения.
(2) Скорость транспортного средства - это заданная скорость (например, около 60 км/ч) или выше.
(3) Транспортное средство не обнаружено в пункте назначения, на который нужно сменить полосу движения (есть свободное место в направлении смены полосы движения).
(4) В направлении смены полосы движения есть полоса движения.
(5) Маркер полосы движения в направлении смены полосы движения представляет собой прерывистую линию.
(6) Транспортное средство движется по прямой или по плавной кривой (например, радиус кривизны R составляет 250 м или более).
(7) Скорость транспортного средства рассматриваемого транспортного средства 10 ниже заданной целевой скорости транспортного средства на заданную скорость (например, 5 км/ч) или более.
(8) Скорость транспортного средства предыдущего транспортного средства ниже заданной целевой скорости транспортного средства на заданную скорость (например, 10 км/ч) или более.
(9) Скорость предшествующего транспортного средства после смены полосы движения выше, чем скорость предыдущего транспортного средства на полосе движения, на заданную скорость (например, около 5 км/ч) или более.
(10) Время находится в пределах заданного времени после нажатия переключателя 67 помощи при смене полосы движения.
Когда любое из условий запуска LCP не удовлетворяется, контроллер 8 прекращает управление сменой полосы движения.
[0123] С другой стороны, когда все условия запуска LCP удовлетворяются, на этапе S406 контроллер 8 включает указатель 44 поворота в течение заданного времени в несколько секунд после того, как водитель нажимает переключатель 67 помощи при смене полосы движения, и запускает процедуру смены полосы движения (LCP). Когда процедура смены полосы движения (LCP) запускается, контроллер 8 управляет работой привода 7 (в частности, привода 73 рулевого управления), чтобы помогать работе ручки, необходимой для смены полосы движения. Кроме того, контроллер 8 отображает информацию, такую как начало процедуры смены полосы движения (LCP) и направление смены полосы движения, на дисплее 51 приборной панели и проекционном дисплее 52 устройства 5 представления. В дополнение к отображению на дисплее 51 приборной панели и проекционному дисплею 52 водитель может быть уведомлен о начале процедуры смены полосы движения (LCP) голосом из динамика 53.
[0124] Условия запуска LCP являются примерами, не ограничиваются этими условиями и могут быть соответствующим образом установлены, так что LCP запускается, если определенные заданные условия удовлетворяются в зависимости от ситуации.
[0125] Затем, на этапе S407, контроллер 8 определяет, удовлетворяются ли условия остановки для смены полосы движения, на основе информации о движении рассматриваемого транспортного средства 10. В частности, например, контроллер 8 определяет, удовлетворяется ли какое-либо из следующих условий.
(1) Перед запуском LCP скорость транспортного средства превышает скоросное ограничение.
(2) Перед запуском LCP водитель держит руки за ручку и нажимает педаль акселератора.
(3) После запуска LCP заданное время превышено (после запуска LCP LCM не может быть запущен в течение заданного времени).
(4) Перед запуском LCM скорость транспортного средства падает ниже заданной скорости (например, около 50 км/ч).
(5) После начала LCP и до начала LCM на соседней полосе нет места, необходимого для смены полосы движения.
(6) Перед началом LCM маркер полосы не обнаруживается.
(7) Перед началом LCM определяется, что в направлении смены полосы движения нет смежной полосы движения или что на определенном расстоянии впереди нет смежной полосы движения.
(8) Перед началом LCM определяется, что впереди на определенном расстоянии есть кривая, имеющая заданный радиус кривизны (например, радиус R кривизны составляет 250 м или меньше).
(9) Перед началом LCM определяется, что на определенном расстоянии впереди есть участок, на котором тип маркера полосы движения указывает, что смена полосы движения на соседнюю полосу движения в направлении смены полосы движения запрещена.
(10) Перед запуском LCM радар 12 обнаруживает экранирование, радиопомехи или осевое отклонение.
(11) Выдается сигнал ручного режима.
(12) Водитель выключает указатель поворота.
Когда любое из этих условий удовлетворяется, контроллер 8 прекращает управление сменой полосы движения. Сигнал ручного режима выдается, когда водитель не держит руки на ручке в течение заданного времени после нажатия переключателя 67 помощи при смене полосы движения.
[0126] С другой стороны, когда условия остановки при смене полосы движения не удовлетворяются, на этапе S408 контроллер 8 управляет работой привода 7 (в частности, привода 73 рулевого управления) и перемещает вбок рассматриваемое транспортное средство 10, и затем выполняет маневр смены полосы движения (LCM) для смены полосы движения на полосу обгона.
[0127] После завершения маневра смены полосы движения (LCM) для смены полосы движения на полосу обгона на этапе S409 контроллер 8 выключает указатель 44 поворота и завершает LCP. Указатель 44 поворота может быть выключен водителем.
[0128] Условия остановки для смены полосы движения являются примерами, не ограничиваются этими условиями и могут быть соответствующим образом установлены, так что смена полосы движения останавливается, если удовлетворяются определенные заданные условия в зависимости от ситуации.
[0129] Затем, на этапе S410, определяется, удовлетворяются ли условия предложения о смене полосы движения на полосу движения для дальнейшего движения. В частности, например, определяется, удовлетворяются ли все следующие условия.
(1) Скорость транспортного средства - это заданная скорость (например, около 60 км/ч) или выше.
(2) Есть место для смены полосы движения по истечении заданного времени.
(3) В направлении смены полосы движения есть полоса движения.
(4) Маркер полосы движения в направлении смены полосы движения представляет собой прерывистую линию.
(5) Транспортное средство движется по прямой или по плавной кривой (например, радиус кривизны R составляет 250 м или более).
(6) Скорость транспортного средства рассматриваемого транспортного средства 10 ниже заданной целевой скорости транспортного средства на заданную скорость (например, 5 км/ч) или более.
(7) Скорость транспортного средства предыдущего транспортного средства ниже заданной целевой скорости транспортного средства на заданную скорость (например, 10 км/ч) или более.
(8) Разница между скоростью транспортного средства предшествующего транспортного средства после смены полосы движения и скоростью транспортного средства рассматриваемого транспортного средства находится в пределах заданной скорости (например, около 5 км/ч).
Если все эти условия соблюдены, считается, что для возврата на полосу движения необходима смена полосы движения.
[0130] Предлагаемые условия смены полосы движения на полосу движения являются примерами, не ограничиваются этими условиями и могут быть надлежащим образом заданы таким образом, чтобы было оценено, что смена полосы движения для возврата на полосу движения является необходимой, если определенные заданные условия удовлетворены в зависимости от ситуации.
[0131] Когда все условия предложения о смене полосы движения на полосу движения удовлетворяются, на этапе S411 контроллер 8 предлагает водителю сменить полосу движения на полосу движения путем уведомления устройства 5 представления.
[0132] Затем, на этапе S412, когда контроллер 8 обнаруживает, что переключатель 67 помощи при смене полосы движения нажат водителем, контроллер 8 переходит к обработке этапа S413. С другой стороны, если переключатель 67 помощи при смене полосы движения не нажимается в течение заданного времени после запроса на смену полосы движения, контроллер 8 прекращает управление сменой полосы движения.
[0133] На этапе S413 контроллер 8 определяет, удовлетворяются ли условия начала процедуры смены полосы движения (LCP) на основе информации о движении рассматриваемого транспортного средства 10. Условия запуска LCP здесь такие же, как на этапе S405. Когда любое из условий запуска LCP не удовлетворяется, контроллер 8 останавливает управление сменой полосы движения для смены полосы движения на полосу движения.
[0134] С другой стороны, когда все условия начала LCP удовлетворяются, на этапе 414 контроллер 8 включает указатель поворота 44 в течение заданного времени после того, как водитель нажимает переключатель 67 помощи при смене полосы движения, и начинает процедуру по смене полосы движения (LCP). Когда LCP запускается, контроллер 8 управляет работой привода 7, чтобы помогать работе ручки, необходимой для смены полосы движения, и уведомляет водителя об информации, такой как начало LCP и направление смены полосы движения, посредством устройства 5 представления.
[0135] Затем, на этапе S415, контроллер 8 определяет, удовлетворяются ли условия остановки для смены полосы движения, на основе информации о движении рассматриваемого транспортного средства 10. Условия остановки при смене полосы движения такие же, как на этапе S407. Когда любое из условий остановки смены полосы движения удовлетворяется, контроллер 8 прекращает управление сменой полосы движения.
[0136] С другой стороны, когда условия остановки для смены полосы движения не удовлетворяются, на этапе S416 контроллер 8 выполняет маневр для смены полосы движения (LCM) для смены полосы движения на полосу обгона после бокового движения рассматриваемого транспортного средства 10.
[0137] По завершении LCM контроллер 8 выключает указатель 44 поворота и завершает LCP на этапе S417. Указатель 44 поворота может быть выключен водителем.
[0138] Далее будет описана функция помощи при путешествии по маршруту для путешествия согласно маршруту к пункту назначения. Функция помощи при движении по маршруту - это функция управления рулевым управлением для помощи при смене полосы движения, необходимой для движения в соответствии с маршрутом, когда человек, например водитель, устанавливает пункт назначения.
[0139] Фиг. 8 - схема, иллюстрирующая управление сменой полосы движения на основе функции помощи при движении по маршруту. Управление сменой полосы движения на основе функции помощи при движении по маршруту запускается с предложением системы 100 помощи при вождении в качестве триггера, когда транспортное средство прибывает в точку смены полосы движения, необходимую для движения по маршруту в случае, когда водитель устанавливает пункт назначения в навигационной системе 3. Случай, когда транспортное средство прибывает в точку смены полосы движения, необходимую для движения в соответствии с маршрутом, представляет собой, например, случай, когда транспортное средство приближается к выездной дороге, ответвительной дороге или точке сокращения полосы движения или тому подобное.
[0140] Во время движения с автономным вождением (операция управления рулевым управлением), когда транспортное средство прибывает в точку смены полосы движения, необходимую для движения согласно маршруту в направлении пункта назначения, установленного водителем или т.п., в момент времени t1-1, если если заданное условие удовлетворено, устройство 5 представления выдает уведомление о побуждении водителя сменить полосу движения. После уведомления о смене полосы движения, когда водитель нажимает переключатель 67 помощи при смене полосы движения в момент времени t1-2, указатель 44 поворота включается в момент времени t1-3 в течение нескольких секунд, и процедура смены полосы движения (LCP ) запускается.
[0141] Аналогично управлению сменой полосы движения на основе функции помощи при обгоне, когда LCP запускается в момент времени t1-3, выполняется управление рулевым управлением. После запуска LCP, когда заданное условие удовлетворяется, маневр смены полосы движения (LCM) запускается, и смена полосы движения выполняется в момент времени t1-4 в течение нескольких секунд, а LCM завершается в момент времени t1-5. в течение нескольких секунд после запуска LCM. После завершения LCM, в момент времени t1-6, указатель 44 поворота выключается автоматически или в результате работы водителя, и LCP завершается.
[0142] Когда необходимо сменить полосу движения несколько раз, то же управление, как показано на фиг. 8 выполняется несколько раз.
[0143] Время от t1-2 (когда переключатель 67 помощи при смене полосы движения нажат) до t1-3 (включение указателя поворота), время от t1-3 (включение указателя поворота) до t1-4 (запуск LCM) и t1-5 (завершение LCM), а время от t1-5 (завершение LCM) до t1-6 (выключение указателя поворота) предпочтительно составляет около нескольких секунд, но не ограничивается этим, и может быть свободно устанавливается в зависимости от ситуации.
[0144] Фиг. 9 - блок-схема, иллюстрирующая управление сменой полосы движения на основе функции помощи при движении по маршруту. Следующее управление сменой полосы движения выполняется контроллером 8.
[0145] На этапе S501, во время операции управления рулевым управлением (переключатель 68 управления рулевым управлением находится в положении ВКЛ), контроллер 8 определяет на основе информации о движении, требуется ли смена полосы движения для рассматриваемого транспортного средства 10 для движения в соответствии с маршрут к установленному пункту назначения. Когда в смене полосы движения нет необходимости, управление сменой полосы движения прекращается.
[0146] Когда контроллер 8 определяет, что для рассматриваемого транспортного средства 10 необходима смена полосы движения, чтобы двигаться в соответствии с маршрутом, на этапе S502 контроллер 8 определяет, удовлетворятся ли условия предложения смены полосы движения вдоль маршрута. В частности, например, контроллер 8 определяет, удовлетворены ли все следующие условия.
(1) Пункт назначения задан в навигационной системе 3.
(2) Транспортное средство находится в автоматическом режиме.
(3) Скорость транспортного средства - это заданная скорость (например, около 60 км/ч) или выше.
(4) Смена полосы движения на целевую возможна (смена полосы движения не запрещена).
(5) Транспортное средство движется по прямой или по плавной кривой (например, радиус кривизны R составляет 250 м или более).
Когда все условия предложения смены полосы движения вдоль маршрута удовлетворены, считается, что смена полосы движения вдоль маршрута необходима, и на этапе S503 контроллер 8 предлагает водителю сменить полосу движения посредством уведомления от устройства 5 представления.
[0147] Предлагаемые условия смены полосы движения вдоль маршрута являются примерами, не ограничиваются этими условиями и могут быть надлежащим образом заданы таким образом, что предполагается, что смена полосы движения вдоль маршрута необходима, если выполняются определенные заданные условия в зависимости от ситуация.
[0148] Затем, на этапе S504, когда контроллер 8 обнаруживает, что переключатель 67 помощи при смене полосы движения нажат водителем, контроллер 8 переходит к обработке этапа S505. С другой стороны, если переключатель 67 помощи при смене полосы движения не нажат в течение заданного времени, контроллер 8 прекращает управление сменой полосы движения.
[0149] На этапе S505 контроллер 8 определяет, удовлетворяются ли условия начала процедуры смены полосы движения (LCP) на основе информации о движении рассматриваемого транспортного средства 10. В частности, например, контроллер 8 определяет, удовлетворены ли все следующие условия.
(1) Водитель держит руки на ручке в течение заданного времени (например, в течение около 2 секунд) после нажатия переключателя 67 помощи при смене полосы движения.
(2) Скорость транспортного средства - это заданная скорость (например, около 60 км/ч) или выше.
(3) Транспортное средство не обнаружено в пункте назначения, на который нужно сменить полосу движения (есть свободное место в направлении смены полосы движения).
(4) В направлении смены полосы движения есть полоса движения.
(5) Маркер полосы движения в направлении смены полосы движения представляет собой прерывистую линию.
(6) Транспортное средство движется по прямой или по плавной кривой (например, радиус кривизны R составляет 250 м или более).
Когда любое из этих условий не удовлетворяется, контроллер 8 прекращает управление сменой полосы движения.
[0150] С другой стороны, когда все условия запуска LCP удовлетворяются, на этапе S506 контроллер 8 включает указатель 44 поворота в течение заданного времени в несколько секунд после того, как водитель нажимает переключатель 67 помощи при смене полосы движения, и запускает процедуру смены полосы движения (LCP). Когда процедура смены полосы движения (LCP) запускается, контроллер 8 управляет работой привода 7 (в частности, привода 73 рулевого управления), чтобы помогать работе ручки, необходимой для смены полосы движения. Кроме того, контроллер 8 отображает информацию, такую как начало процедуры смены полосы движения (LCP) и направление смены полосы движения, на дисплее 51 приборной панели и проекционном дисплее 52 устройства 5 представления. В дополнение к отображению на дисплее 51 приборной панели и проекционному дисплею 52 водитель может быть уведомлен о начале процедуры смены полосы движения (LCP) голосом из динамика 53.
[0151] Условия запуска LCP являются примерами, не ограничиваются этими условиями и могут быть соответствующим образом установлены, так что LCP запускается, если определенные заданные условия удовлетворяются в зависимости от ситуации.
[0152] Затем, на этапе S507, контроллер 8 определяет, удовлетворяются ли условия остановки для смены полосы движения, на основе информации о движении рассматриваемого транспортного средства 10. В частности, например, контроллер 8 определяет, удовлетворяется ли какое-либо из следующих условий.
(1) Перед запуском LCP скорость транспортного средства превышает ограничение скорости.
(2) Перед запуском LCP водитель держит руки на ручке и нажимает педаль акселератора.
(3) После запуска LCP заданное время превышено (после запуска LCP LCM не может быть запущен в течение заданного времени).
(4) Перед запуском LCM скорость транспортного средства падает ниже заданной скорости (например, около 50 км/ч).
(5) После начала LCP и до начала LCM на соседней полосе нет места, необходимого для смены полосы движения.
(6) Перед началом LCM маркер полосы не обнаруживается.
(7) Перед началом LCM определяется, что в направлении смены полосы движения нет смежной полосы движения или что на определенном расстоянии впереди нет смежной полосы движения.
(8) Перед началом LCM определяется, что впереди на определенном расстоянии есть кривая, имеющая заданный радиус кривизны (например, радиус R кривизны составляет 250 м или меньше).
(9) Перед началом LCM определяется, что на определенном расстоянии впереди есть участок, на котором тип маркера полосы движения указывает, что смена полосы движения на соседнюю полосу движения в направлении смены полосы движения запрещена.
(10) Перед запуском LCM радар 12 обнаруживает экранирование, радиопомехи или осевое отклонение.
(11) Выдается сигнал ручного режима.
(12) Водитель выключает указатель поворота.
Когда любое из этих условий удовлетворяется, контроллер 8 прекращает управление сменой полосы движения. Сигнал ручного режима выдается, когда водитель не держит руки на ручке в течение заданного времени, составляющего несколько секунд, после нажатия переключателя 67 помощи при смене полосы движения.
[0153] С другой стороны, когда условия остановки при смене полосы движения не удовлетворяются, на этапе S508 контроллер 8 управляет работой привода 7 (в частности, привода 73 рулевого управления) для бокового движения рассматриваемого транспортного средства 10, а затем выполняет маневр по смене полосы движения (LCM).
[0154] Условия остановки для смены полосы движения являются примерами, не ограничиваются этими условиями и могут быть надлежащим образом установлены, так что смена полосы движения останавливается, если удовлетворяются определенные заданные условия, в зависимости от ситуации.
[0155] По завершении LCM контроллер 8 выключает указатель 44 поворота и завершает LCP на этапе S509. Указатель 44 поворота может быть выключен водителем.
[0156] После завершения LCP контроллер 8 возвращается к этапу S501 и определяет на основе информации о движении рассматриваемого транспортного средства 10, необходима ли смена полосы движения для движения в соответствии с маршрутом. Если смена полосы движения дополнительно необходима, управление с этапов S502 по этап S510 выполняется снова. С другой стороны, если дальнейшая смена полосы движения не требуется, управление сменой полосы движения прекращается.
[0157] Хотя функция управления ограничением скорости транспортного средства и функция управления рулевым управлением, предоставленные в системе 100 помощи при вождении, были описаны выше, они являются примерами автономного управления вождением и не обязательно ограничиваются вышеупомянутыми конфигурациями и потоками. Таким образом, система помощи при вождении, в которой используется управление операциями уведомления о различных изменениях, описанных ниже, не ограничивается системой помощи при вождении, которая выполняет вышеупомянутое автономное управление вождением.
[0158] Далее будет описано управление операциями уведомления о различных изменениях.
[0159] Информация предупреждения, сообщаемая водителю устройством 5 представления, включает в себя сигнал о необходимости посмотреть вперёд,, первичный сигнал ручного режима, вторичный сигнал ручного режима, сигнал об отключении управления рулевым управлением, сигнал об отключении управления скоростью транспортного средства/рулевого управления, сигнал о приближении, сигнал о столкновении, сигнал о выезде с полосы движения и т. д.
[0160] Сигнал о необходимости посмотреть вперёд уведомляется, когда определяется, что водитель не смотрит вперед. Первичный сигнал ручного режима уведомляется, когда обнаруживается, что водитель освобождает руки от ручки в ручном режиме. Вторичный сигнал ручного режима уведомляется, когда водитель не смотрит вперед в течение заданного времени после сигнала о необходимости посмотреть вперёд, или когда водитель не удерживает ручку в течение заданного времени после уведомления о первичном сигнале ручного режима. Сигнал об отключении управления рулевым управлением уведомляется, когда рулевое управление отпускается в автоматическом режиме , и предлагает водителю выполнить операцию с ручкой. Сигнал об отключении управления скоростью транспортного средства/управления рулевым управлением уведомляется, когда управление скоростью транспортного средства и рулевое управление отпускаются в автоматическом режиме , и побуждает водителя выполнить операцию с ручкой и нажатие педали. Сигнал о приближении уведомляется, когда определяется, что существует риск столкновения с движущимся впереди транспортным средством. Сигнал о столкновении уведомляется, когда задействован аварийный тормоз (автоматическое управление тормозом). Сигнал о выезде с полосы движения уведомляется, когда определяется, что транспортное средство приближается к маркеру полосы с правой или левой стороны полосы движения.
[0161] Далее будут описаны подробности сигнала о необходимости посмотреть вперёд.
[0162] Сигнал о необходимости посмотреть вперёд, представляет собой сигнал, который просит водителя смотреть вперед посредством голоса и отображения, когда обнаруживается, что водитель не смотрит вперед (направление движения рассматриваемого транспортного средства 10) во время движения с автономным вождением (во время рулевого управления). Например, экран предупреждения, показанный на фиг. 10 отображается на дисплее 51 приборной панели и проекционном дисплее 52, а предупреждение выдается водителю голосом из динамика 53. (а) на фиг. 10 - пример экрана предупреждения, отображаемого на проекционном дисплее 52, и (b) на фиг. 10 является примером экрана предупреждения, отображаемого на дисплее 51 приборной панели.
[0163] Хотя во время ручного режима уведомляется только сигнал о необходимости посмотреть вперёд, вторичный сигнал о ручном режиме, описанный ниже, уведомляется, когда водитель не смотрит вперед даже по истечении заданного времени (например, около 5 секунд) после того, как в автоматическом режиме н уведомляется сигнал о необходимости посмотреть вперёд.
[0164] Здесь, если предупреждение выдается водителю все время, когда водитель не обращен вперед, например, в случае, когда водитель обращен в направлении полосы движения, когда планируется смена полосы движения, или в случае, когда водитель обращен в направлении влево или вправо только для проверки, также будет выдано предупреждение. То есть выдается ненужное предупреждение.
[0165] Следовательно, в настоящем варианте осуществления изобретения, во-первых, даже когда водитель не обращен вперед, например, когда водитель обращен в направлении смены полосы движения, уведомление (предупреждение) о сигнале о необходимости посмотреть вперёд, запрещено. Таким образом, в настоящем варианте осуществления изобретения во время управления сменой полосы движения, когда водитель не смотрит вперед, а обращен в направлении смены полосы движения, сигнал о необходимости посмотреть вперёд, на устройстве 5 представления не уведомляется. В результате уменьшается количество ненужных предупреждений.
[0166] Что касается направления смены полосы движения, когда указатель 44 поворота работает, направление включения (работы) указателя 44 поворота оценивается как направление смены полосы движения. Таким образом, можно определить, необходим ли запрет предупреждения, на основе только информации о направлении освещения указателя 44 поворота и ориентации лица водителя, и никакой сложной обработки не требуется.
[0167] В случае, когда система 100 помощи при вождении предлагает смену полосы движения, возможно, что водитель проверяет направление смены полосы движения до того, как сработает указатель 44 поворота. Следовательно, в настоящем варианте осуществления изобретения, в случае, когда система 100 помощи при вождении предлагает смену полосы движения, когда водитель обращен в направлении смены полосы движения, предложенной системой, даже до того, как сработал указатель 44 поворота, уведомление сигнала о необходимости посмотреть вперёд, запрещено. В результате количество ненужных предупреждений еще больше сокращается.
[0168] Кроме того, в настоящем варианте осуществления изобретения сигнал о необходимости посмотреть вперёд, не уведомляется до тех пор, пока время, в течение которого водитель не обращен вперед, не превысит заданное время. То есть в настоящем варианте осуществления изобретения в случае, когда время, когда водитель не обращен вперед, например, когда водитель обращен в направлении налево и направо только для проверки, является коротким временем, то есть таким длинным временем, в течение которого водитель не обращен вперед, не продолжается в течение заданного времени, сигнал о необходимости посмотреть вперёд, не уведомляется. В результате количество ненужных предупреждений еще больше сокращается.
[0169] Фиг. 11 - блок-схема, иллюстрирующая управление операцией уведомления сигнала о необходимости посмотреть вперёд. Следующее управление операцией уведомления повторно выполняется контроллером 8.
[0170] Во время движения с автономным вождением (управление помощью при вождении) на этапе S601 на основе информации распознавания лиц, полученной камерой 21 наблюдения за водителем, контроллер 8 определяет, закрыты ли глаза водителя в течение заданного времени (например, около 5 секунд).
[0171] Когда контроллер 8 определяет, что глаза водителя постоянно закрыты в течение заданного времени, контроллер 8 оценивает, что водитель не смотрит вперед, и переходит к обработке этапа S608. На этапе S608 контроллер 8 уведомляет водителя сигналом о необходимости посмотреть вперёд, посредством устройства 5 представления. Сигнал о необходимости посмотреть вперёд, уведомляется дисплеем на дисплее 51 приборной панели и проекционным дисплеем 52, и голосом из динамика 53.
[0172] С другой стороны, когда контроллер 8 определяет, что глаза водителя открыты или время, в течение которого глаза закрыты, не превышает заданного времени на этапе S601, контроллер 8 переходит к обработке этапа S602.
[0173] На этапе S602, на основе информации распознавания лиц, полученной камерой 21 наблюдения за водителем, контроллер 8 определяет, не изменяется ли ориентация лица водителя и глаза не открываются или не закрываются в заданное время (например, около 60 секунд). Когда ориентация лица водителя не изменяется и глаза не открываются или не закрываются в течение заданного времени, контроллер 8 оценивает, что водитель не смотрит вперед, и переходит к обработке этапа S608. На этапе S608 контроллер 8 уведомляет водителя сигналом о необходимости посмотреть вперёд, посредством дисплея и голоса устройства 5 представления.
[0174] С другой стороны, когда водитель меняет ориентацию лица в течение заданного времени или когда водитель открывает или закрывает глаза в течение заданного времени, контроллер 8 переходит к обработке этапа S603.
[0175] На этапе S603 на основе информации распознавания лиц, полученной камерой 21 наблюдения за водителем, контроллер 8 определяет, не обращен ли водитель вперед (направление движения рассматриваемого транспортного средства 10) непрерывно в течение заданного времени ( первое заданное время, например около 5 секунд). В частности, когда удовлетворяются следующие условия, контроллер 8 определяет, что водитель не обращен вперед непрерывно в течение заданного времени.
(1) Водитель оращен в направлении влево или вправо под заданным углом (например, около 20 градусов) или более по отношению к направлению движения транспортного средства в течение заданного времени (например, около 5 секунд).
(2) Водитель обращен в направлении вверх или вниз под заданным углом (например, около 20 градусов) или более по отношению к горизонтальному направлению транспортного средства в течение заданного времени (например, около 5 секунд).
Когда любое из условий удовлетворяется, контроллер 8 определяет, что водитель не обращен вперед непрерывно в течение заданного времени.
[0176] Когда контроллер 8 определяет, что водитель не обращен вперед непрерывно в течение заданного времени на этапе S603, контроллер 8 переходит к обработке этапа S604. С другой стороны, когда контроллер 8 определяет, что водитель обращен вперед или время, в течение которого водитель не обращен вперед, не превышает заданное время, сигнал о необходимости посмотреть вперёд,, не уведомляется, и контроллер 8 прекращает управление операцией уведомления сигнала о необходимости посмотреть вперёд.
[0177] Условия, используемые для определения того, не обращен ли водитель вперед, являются примерами, не ограничиваются этими условиями и могут быть надлежащим образом установлены таким образом, чтобы было определено, что водитель не обращен вперед, если выполняются определенные заданные условия в зависимости от ситуация.
[0178] На этапе S604, на основе информации о движении рассматриваемого транспортного средства 10, контроллер 8 определяет, выполняется ли управление сменой полосы движения. Как описано выше, управление сменой полосы движения начинается, когда водитель выполняет операцию указателя поворота или когда система 100 помощи при вождении предлагает смену полосы движения. Следовательно, на основе информации о работе внутреннего устройства 4 транспортного средства среди информации о движении рассматриваемого транспортного средства 10 контроллер 8 определяет, выполняется ли управление сменой полосы движения, в зависимости от того, обнаружена ли работа указателя 44 поворота или система 100 помощи при вождении предлагает водителю сменить полосу движения.
[0179] Когда контроллер 8 определяет, что управление сменой полосы движения не выполняется на этапе S604, контроллер 8 переходит к обработке этапа S608 и уведомляет водителя сигналом о необходимости посмотреть вперёд посредством дисплея и голоса устройства 5 представления.
[0180] С другой стороны, когда контроллер 8 определяет, что управление сменой полосы движения выполняется на этапе S604, контроллер 8 переходит к обработке этапа S605. На этапе S605 контроллер 8 определяет, обращен ли водитель в направлении смены полосы движения, на основе информации о движении рассматриваемого транспортного средства 10. Когда указатель 44 поворота работает, контроллер 8 оценивает, что направление освещения указателя 44 поворота является направлением смены полосы движения. С другой стороны, когда указатель 44 поворота не включен, контроллер 8 устанавливает направление к полосе движения в пункте назначения изменения, предложенном системой 100 помощи при вождении, в качестве направления смены полосы движения. Ориентация лица водителя определяется на основе информации распознавания лица, полученной камерой 21 наблюдения за водителем.
[0181] Когда контроллер 8 определяет, что водитель не обращен в направлении смены полосы движения на этапе S605, контроллер 8 переходит к обработке этапа S608 и уведомляет водителя о сигнале о необходимости посмотреть вперёд, посредством дисплея и голоса устройства 5 представления.
[0182] С другой стороны, когда контроллер 8 определяет, что водитель обращен в направлении смены полосы движения на этапе S605, контроллер 8 не уведомляет водителя о сигнале о необходимости посмотреть вперёд, и переходит к обработке этапа S606.
[0183] На этапе S606, на основе информации о движении рассматриваемого транспортного средства 10, контроллер 8 определяет, постоянно ли водитель обращен в направлении смены полосы движения в течение заданного времени (второго заданного времени). Когда определено, что водитель постоянно обращен в направлении смены полосы движения в течение заданного времени, контроллер 8 переходит к обработке этапа S608 и уведомляет сигнал о необходимости посмотреть вперёд. Это связано с тем, что водитель обращен в направлении смены полосы движения более определенного времени, что опасно, как и в случае отвлеченного вождения.
[0184] Заданное время (второе заданное время) устанавливается больше, чем заданное время (первое заданное время, например, около 5 секунд) на этапе S603.
[0185] Когда контроллер 8 обнаруживает, что водитель обращен вперед в течение заданного времени (второго заданного времени) на этапе S606, контроллер 8 запрещает уведомление о сигнале о необходимости посмотреть вперёд, на этапе S607.
[0186] Как описано выше, когда водитель выполняет операцию указателя поворота, контроллер 8 определяет, что указатель поворота 44 работает, и запрещает уведомление (предупреждение) о сигнале о необходимости посмотреть вперёд, когда водитель обращен в направлении смены полосы движения после указатель 44 поворота работает. Кроме того, в случае, когда контроллер 8 определяет, необходима ли смена полосы движения, и уведомляет водителя об смене полосы движения, если определено, что смена полосы движения необходима, то есть в случае, когда система 100 помощи при вождении предлагает при смене полосы движения уведомление (предупреждение) о сигнале о необходимости посмотреть вперёд,запрещено, когда водитель обращен в направлении смены полосы движения после того, как водитель уведомлен о смене полосы движения.
[0187] После уведомления о сигнале о необходимости посмотреть вперёд,на этапе S608 контроллер 8 определяет, находится ли транспортное средство в автоматическом режиме на этапе S609. В случае ручного режима контроллер 8 переходит к управлению операцией уведомления о сигнале ручного режима (этап S810), описанном ниже. С другой стороны, в случае ручного режима (водитель держит руки на ручке) контроллер 8 останавливает уведомление о сигнале о необходимости посмотреть вперёд, когда контроллер 8 обнаруживает, что водитель смотрит вперед на этапе S610.
[0188] При управлении операцией уведомления о сигнале о необходимости посмотреть вперёд, контроллер 8 определяет, смотрит ли водитель вперед, на основе того, закрыты ли глаза водителя, не изменяется ли ориентация лица водителя, и глаза не открываются или не закрываются в заданное время, и смотрит ли водитель вперед. Однако условия для определения того, обращен ли водитель вперед или нет, не ограничиваются этим и могут быть соответствующим образом установлены таким образом, что определяется, что водитель не смотрит вперед, если определенные заданные условия удовлетворяются в зависимости от ситуации. Например, этап S601 ( закрыты ли глаза водителя) или этап S602 (не изменяется ли ориентация лица водителя и не открываются или не закрываются глаза в заданное время) может быть пропущен, как соответствующий, или порядок обработки этапов S601, S602 и этапов S603-S606 может быть изменен.
[0189] Далее будут описаны подробности сигнала ручного режима. Сигнал ручное режима выдается во время движения с автономным вождением (во время операции управления рулевым управлением) и включает в себя первичный сигнал ручного режима и вторичный сигнал ручного режима.
[0190] Первичный сигнал ручного режима уведомляется, когда обнаруживается, что водитель освобождает руки от ручки в ручном режиме, и запрашивает у водителя выполнение операции с ручкой посредством дисплея. Первичный сигнал при включении побуждает водителя выполнить операцию с ручкой, отображая, например, экран предупреждения, как проиллюстрировано на фиг. 12 на дисплее 51 приборной панели и проекционном дисплее 52. (а) на фиг. 12 - пример экрана предупреждения, отображаемого на проекционном дисплее 52, и (b) на фиг. 12 является примером экрана предупреждения, отображаемого на дисплее 51 приборной панели.
[0191] Вторичный сигнал ручного режима уведомляется, когда водитель не смотрит вперед непрерывно в течение заданного времени (четвертое заданное время, например, около 5 секунд) после уведомления о сигнале о необходимости посмотреть вперёд, или когда водитель не удерживайте ручку непрерывно в течение заданного времени (четвертое заданное время, например, около 5 секунд) после уведомления о первичном сигнале ручного режима. Вторичный сигнал ручного режима запрашивает от водителя выполнить операцию ручки посредством дисплея, голоса и предупреждающего тормоза (медленное нажатие на тормоз несколько раз за короткое время). Водитель побуждается выполнить операцию с ручкой, отображая, например, экраны предупреждений, как показано на фиг. 13 на дисплее 51 приборной панели и проекционном дисплее 52, и голосом из динамика 53 и медленным торможением (предупреждающий тормоз) за короткое время. (а) на фиг. 13 - пример экрана предупреждения, отображаемого на проекционном дисплее 52, и (b) на фиг. 13 является примером экрана предупреждения, отображаемого на дисплее 51 приборной панели.
[0192] Если вторичный сигнал ручного режима всегда уведомляется после уведомления о сигнале о необходимости посмотреть вперёд,, вторичный сигнал ручного режима также может уведомляться в атоматическом режиме, когда водитель смотрит вперед сразу после уведомления сигнала о необходимости посмотреть вперёд. То есть выдается ненужное предупреждение. Следовательно, в настоящем варианте осуществления изобретения в автоматическом режиме , даже после уведомления о сигнале о необходимости посмотреть вперёд, когда водитель смотрит вперед в течение заданного времени (s третье заданное время) короче четвертого заданного времени, вторичный сигнал ручного режима не уведомляется. То есть, как описано выше, когда сигнал о необходимости посмотреть вперёд уведомляется в автоматическом режиме , если водитель смотрит вперед в течение заданного времени, автоматический режим не отменяется. Таким образом, в настоящем варианте осуществления изобретения, в автоматическом режиме , даже после уведомления о сигнале о необходимости посмотреть вперёд, если водитель смотрит вперед в течение заданного времени (третьего заданного времени), автоматический режим не отключается, и вторичный сигнал ручного режима не уведомляется. В результате количество ненужных предупреждений еще больше сокращается.
[0193] Фиг. 14 и фиг. 15 - это блок-схемы, иллюстрирующие управление операцией уведомления о сигнале ручного режима. Управление операцией уведомления о сигнале ручного режима запускается, когда режим переключается в ручной режим (или запускается рулевое управление и запускается ручной режим), и когда сигнал о необходимости посмотреть вперёд, уведомляется в автоматический режим.
[0194] Фиг. 14 - блок-схема, иллюстрирующая управление операцией уведомления о сигнале ручного режима, которая запускается, когда режим переключается в ручной режим. Следующее управление операцией уведомления повторно выполняется контроллером 8.
[0195] Когда режим переключается в ручной режим (или начинается ручной режим) во время автономного вождения, на этапе S710 контроллер 8 определяет, выполняется ли управление сменой полосы движения на основе информации о движении. Как описано выше, управление сменой полосы движения запускается, когда водитель выполняет операцию или когда система 100 помощи при вождении предлагает смену полосы движения. В случае, когда управление сменой полосы движения не выполняется (то есть в случае, когда выполняется управление удержанием центра полосы движения), контроллер 8 переходит к обработке этапа S720.
[0196] На этапе S720, на основе информации о движении (информация о состоянии водителя, полученная датчиком 22 касания), контроллер 8 определяет, держит ли водитель руки на ручке в течение заданного времени (например, в пределах около 5 секунд) в ручном режиме. Когда водитель держит руки на ручке в течение заданного времени, нет необходимости уведомлять о сигнале ручного режима, и, таким образом, контроллер 8 завершает управление операцией уведомления ручного оповещения.
[0197] С другой стороны, когда водитель непрерывно освобождает руки от ручки в течение заданного времени в ручном режиме, контроллер 8 уведомляет первичный сигнал о ручном режиме на этапе S730. Первичный сигнал ручного режима при нажатии побуждает водителя выполнить операцию с ручкой посредством дисплея на устройстве 5 представления.
[0198] Затем, на этапе S740, на основе информации о движении рассматриваемого транспортного средства 10 (информация о состоянии водителя, полученная датчиком 22 касания), контроллер 8 определяет, держит ли водитель руки на ручке в пределах заданного время (например, в течение около 5 секунд) после уведомления о первичном сигнале ручного режима.
[0199] На этапе S740, когда контроллер 8 определяет, что водитель держит руки на ручке в течение заданного времени после уведомления о первичном сигнале ручного режима, контроллер 8 останавливает первичный сигнал ручного режима.
[0200] С другой стороны, когда водитель непрерывно отпускает руки с ручки в течение заданного времени на этапе S740, контроллер 8 переходит к обработке этапа S750, и уведомляется вторичный сигнал ручного режима. Вторичный сигнал о ручном режиме осуществляется дисплеем, голосом и предупреждающим тормозом. То есть контроллер 8 побуждает водителя выполнить операцию с ручкой, уведомляя водителя посредством дисплея и голоса устройства 5 представления и управляя тормозным приводом 72, чтобы задействовать тормоз несколько раз.
[0201] Затем, на этапе S760, на основе информации о движении (информация о состоянии водителя, полученная датчиком 22 касания), контроллер 8 определяет, удерживает ли водитель руки на ручке в течение заданного времени (например, в течение около 5 секунд). Когда водитель держит руки на ручке в течение заданного времени (операция ручки выполняется), контроллер 8 останавливает вторичный сигнал ручного режима.
[0202] С другой стороны, когда на этапе S760 определяется, что водитель постоянно отпускает руки с ручки в течение заданного времени, контроллер 8 управляет тормозным приводом 72 для замедления и принудительной остановки рассматриваемого транспортного средства 10 на этапе S770.
[0203] Затем, на этапе S804, на основе информации о движении (информация о состоянии водителя, полученная датчиком 22 касания), контроллер 8 определяет, удерживает ли водитель руки на ручке в течение заданного времени (пятое заданное время, время, например, в пределах около 5 секунд). Когда водитель держит руки на ручке в течение заданного времени (операция ручки выполняется), контроллер 8 останавливает вторичный сигнал ручного режима.
[0204] Когда контроллер 8 определяет, что управление сменой полосы движения выполняется на этапе S710, контроллер 8 переходит к обработке этапа S721.
[0205] На этапе S721, основываясь на информации о движении, контроллер 8 определяет, держит ли водитель руки на ручке в течение заданного времени (например, в пределах около 2 секунд) после начала процедуры смены полосы движения (LCP). Когда водитель держит руки на ручке в течение заданного времени после запуска LCP, контроллер 8 завершает управление операцией уведомления о сигнале ручного режима.
[0206] С другой стороны, когда водитель непрерывно освобождает руки от ручки в течение заданного времени после запуска LCP, на этапе S722 контроллер 8 уведомляет о первичном сигнале ручного режима и прекращает управление сменой полосы движения.
[0207] Когда на этапе S722 уведомляется о первичном сигнале ручного режима, контроллер 8 затем переходит к обработке этапа S740 и определяет на основе информации о движении рассматриваемого транспортного средства 10, держит ли водитель руки на ручке в течение заданного времени (например, в течение около 5 секунд) после уведомления о первичном сигнале ручного режима. Когда водитель непрерывно освобождает руки от ручки в течение заданного времени, контроллер 8 переходит к обработке этапа S750, и уведомляется вторичный сигнал ручного режима. Когда водитель непрерывно освобождает руки от ручки в течение заданного времени, даже если уведомлен вторичный сигнал ручного режима, контроллер 8 принудительно останавливает рассматриваемое транспортное средство 10 (этап S770).
[0208] Фиг. 15 - блок-схема последовательности операций, иллюстрирующая управление операцией уведомления о сигнале ручного режима, которая запускается, когда сигнал о необходимости посмотреть вперёд, уведомляется в автоматическом режиме. Случай, когда сигнал о необходимости посмотреть вперёд, уведомляется в автоматическом режиме, является случаем, когда он определяется на этапе S609 на фиг. 11 видно, что транспортное средство находится в автоматическом режиме. Следующее управление операцией уведомления повторно выполняется контроллером 8.
[0209] Когда сигнал о необходимости посмотреть вперёд, уведомляется в автоматическом режиме, на этапе S810 контроллер 8 определяет на основе информации распознавания лиц, полученной камерой 21 наблюдения за водителем, смотрит ли водитель вперед (в направление движения рассматриваемого транспортного средства 10) в течение заданного времени после уведомления о сигнале о необходимости посмотреть вперёд. Смотрит ли водитель вперед, определяется в зависимости от того, меняет ли водитель ориентацию лица в направлении движения транспортного средства или глаза не закрываются в течение заданного времени или дольше. Когда водитель меняет ориентацию лица на направление движения и глаза не закрываются в течение заданного времени или дольше, контроллер 8 определяет, что водитель смотрит вперед.
[0210] Когда водитель смотрит вперед в течение заданного времени (третьего заданного времени) на этапе S810, контроллер 8 останавливает сигнал о необходимости посмотреть вперёд, и запрещает уведомление о сигнале ручного режима, и автоматический режим продолжается. С другой стороны, когда водитель не смотрит вперед непрерывно в течение заданного времени на этапе S810, контроллер 8 переходит к обработке этапа S820.
[0211] На этапе S820, на основе информации распознавания лиц, полученной камерой 21 наблюдения за водителем, контроллер 8 определяет, смотрит ли водитель вперед в течение заданного времени (четвертого заданного времени) по истечении третьего заданного времени, после того как сигнал о необходимости посмотреть вперёд, уведомляется. Когда водитель смотрит вперед в течение четвертого заданного времени, контроллер 8 переключает режим в ручной режим и останавливает уведомление о сигнале о необходимости посмотреть вперёд, на этапе S851.
[0212] С другой стороны, когда водитель не смотрит вперед в течение четвертого заданного времени на этапе 820, контроллер 8 переходит к обработке этапа S830.
[0213] На этапе S830 контроллер 8 уведомляет водителя о вторичном сигнале ручного режима. Вторичный сигнал учного режима уведомляется посредством дисплея и голоса устройства 5 представления и предупреждающим тормозом.
[0214] Затем, на этапе S840, на основе информации о движении (информация о состоянии водителя, полученная датчиком 22 касания), контроллер 8 определяет, удерживает ли водитель руки на ручке в течение заданного времени (пятое заданное время, время, например, в пределах около 5 секунд). Когда водитель держит руки на ручке в течение заданного времени (операция с ручкой выполняется), контроллер 8 останавливает сигнал о необходимости посмотреть вперёд,, и вторичный сигнал ручного режима, и продолжает автономное вождение как ручной режим на этапе S851.
[0215] С другой стороны, когда на этапе S840 определяется, что водитель постоянно отпускает руки с ручки в течение заданного времени (пятого заданного времени), контроллер 8 управляет тормозным приводом 72 для замедления и принудительной остановки рассматриваемого транспортного средства 10 на этапе S850.
[0216] Согласно системе 100 помощи при вождении согласно варианту осуществления изобретения, описанному выше, могут быть получены следующие эффекты.
[0217] В системе 100 помощи при вождении контроллер 8 получает информацию о состоянии водителя во время движения с автономным вождением (во время выполнения управления рулевым управлением) и уведомляет водителя о сигнале (предупреждении) о необходимости посмотреть вперёд, когда водитель не обращен вперед на основании информации о состоянии водителя. Однако, когда водитель обращен в направлении смены полосы движения, сигнал о необходимости посмотреть вперёд, запрещен. То есть в случае, когда водитель не обращен вперед, например, когда водитель обращен в направлении смены полосы движения, водитель также не уведомляется (предупреждается) о сигнале о необходимости посмотреть вперёд. В результате уменьшается количество ненужных предупреждений. Кроме того, контроллер 8 определяет, необходимо ли запрещать сигнал (предупреждение) о необходимости посмотреть вперёд, основываясь только на направлении смены полосы движения и информации о состоянии водителя (ориентации лица водителя), и никакая сложная обработка не требуется для определения необходимости запрета предупреждения. Следовательно, можно обеспечить способ помощи при вождении и систему помощи при вождении, способную уменьшить количество ненужных предупреждений простым способом.
[0218] Кроме того, когда водитель не обращен вперед и не меняет направление движения во время смены полосы движения, система 100 помощи при вождении выдает сигнал (предупреждение) о необходимости посмотреть вперёд. Если все сигналы (предупреждения) о необходимости посмотреть вперёд, запрещены, когда водитель не обращен вперед во время смены полосы движения, предупреждение также запрещено, когда водитель не обращен вперед и в направлении смены полосы движения. С другой стороны, система 100 помощи при вождении по настоящему варианту осуществления изобреетния также выдает сигнал (предупреждение) о необходимости посмотреть вперёд, для акта отвлеченного вождения, при котором водитель не обращен вперед, и направления смены полосы движения во время смены полосы движения. В результате, по сравнению со случаем, когда все предупреждения запрещены во время смены полосы движения, можно предотвратить акт отвлеченного вождения, при котором водитель не обращен вперед, и направление смены полосы движения.
[0219] Система 100 помощи при вождении обнаруживает рабочее состояние указателя 44 поворота и запрещает сигнал (предупреждение) о необходимости посмотреть вперёд, когда водитель обращен в направлении включения (работы) указателя 44 поворота. Таким образом, контроллер 8 определяет, необходимо ли запрещение сигнала (предупреждения) о необходимости посмотреть вперёд, на основании только направления освещения указателя 44 поворота и информации о состоянии водителя (ориентации лица водителя), и не требуется сложной обработки для определения необходимости запрета предупреждения. Таким образом, количество ненужных предупреждений можно уменьшить простым способом.
[0220] Когда водитель не обращен вперед и на направление освещения указателя 44 поворота во время включения указателя 44 поворота, система 100 помощи при вождении выдает сигнал (предупреждение) о необходимости посмотреть вперёд. В результате, по сравнению со случаем, когда все предупреждения запрещены во время включения указателя 44 поворота, можно предотвратить акт отвлеченного вождения, при котором водитель не обращен вперед и на направление освещения указателя поворота.
[0221] Система 100 помощи при вождении определяет, необходима ли смена полосы движения транспортного средства, и предлагает (уведомляет) водителя о смене полосы движения, когда определяет, что смена полосы движения необходима. Затем, после того, как водитель уведомлен о смене полосы движения, когда водитель обращен в направлении смены полосы движения, сигнал (предупреждение) о необходимости посмотреть вперёд, запрещается. Таким образом, в случае, когда смена полосы движения предлагается системой 100 помощи при вождении, когда водитель обращен в направлении смены полосы движения до включения указателя 44 поворота, сигнал (предупреждение) о необходимости посмотреть вперёд, также запрещен. Таким образом, количество ненужных предупреждений может быть уменьшено.
[0222] Система 100 помощи при вождении выдает водителю сигнал (предупреждение) о необходимости посмотреть вперёд, когда водитель управляет транспортным средством, не будучи обращенным вперед в течение первого заданного времени или дольше. Таким образом, сигнал о необходимости посмотреть вперёд не уведомляется до тех пор, пока время, в течение которого водитель не обращен вперед, не будет равно или больше первого заданного времени. Следовательно, например, можно предотвратить выдачу предупреждения в случае, когда время, когда водитель не обращен вперед, например, когда водитель обращен в направлении налево и направо только для проверки, является коротким временем. То есть можно дополнительно уменьшить количество ненужных предупреждений. Кроме того, когда водитель обращен в направлении смены полосы движения, система 100 помощи при вождении не уведомляет сигнал о необходимости посмотреть вперёд, (запрещает предупреждение), до тех пор, пока время, в течение которого водитель смотрит в направлении полосы движения, не превысит второе заданное время дольше, чем первое заданное время. Таким образом, когда водитель обращен в направлении смены полосы движения, предупреждение запрещается до тех пор, пока не будет превышено второе заданное время, превышающее первое заданное время. Таким образом уменьшается количество ненужных предупреждений. Кроме того, когда водитель обращен в направлении смены полосы движения после второго заданного времени, выдается сигнал (предупреждение) о необходимости посмотреть вперёд. В результате можно предотвратить долгое ожидание водителя во время смены полосы движения.
[0223] Система 100 помощи при вождении включает в себя автоматический режим, выполняемый в состоянии, когда водитель освобождает руки от ручки, и ручной режим, выполняемый в состоянии, когда водитель держит руки на ручке. Кроме того, в автоматическом режиме после того, как водитель уведомлен о сигнале (предупреждении) о необходимости посмотреть вперёд, автоматический режим продолжается, когда водитель обращен вперед в течение заданного времени. Кроме того, когда водитель обращен вперед по истечении заданного времени, движение с автономным вождением продолжается в рабочем режиме. Таким образом, поскольку автоматический режим продолжается, когда водитель обращен вперед в течение заданного времени после уведомления о сигнале о необходимости посмотреть вперёд, можно уменьшить количество ненужных уведомлений о ручном режиме (предупреждение для побуждения водителя для выполнения операции с ручкой). Таким образом, количество ненужных предупреждений может быть уменьшено.
[0224] Система 100 помощи при вождении задействует тормоз множество раз, чтобы предупредить водителя, когда водитель не обращен вперед, даже по истечении заданного времени после того, как сигнал (предупреждение) о необходимости посмотреть вперёд, выдается водителю в автоматическом режиме. Кроме того, после того, как тормоз приводится в действие несколько раз для предупреждения водителя, тормоз дополнительно приводится в действие для принудительной остановки транспортного средства, когда водитель не держит ручку даже по истечении заданного времени. В результате можно предотвратить аварию, которая может произойти из-за того, что водитель не смотрит вперед.
[0225] Не все этапы потока управления, описанные в настоящем варианте осуществления изобретения, должны выполняться, и эти этапы потока управления могут быть опущены при необходимости во время реализации изобретения. При необходимости порядок обработки также может быть изменен.
[0226] Хотя вариант осуществления настоящего изобретения был описан выше, этот вариант осуществления является просто частью примеров применения настоящего изобретения и не ограничивает технический объем настоящего изобретения конкретной конфигурацией настоящего варианта осуществления.


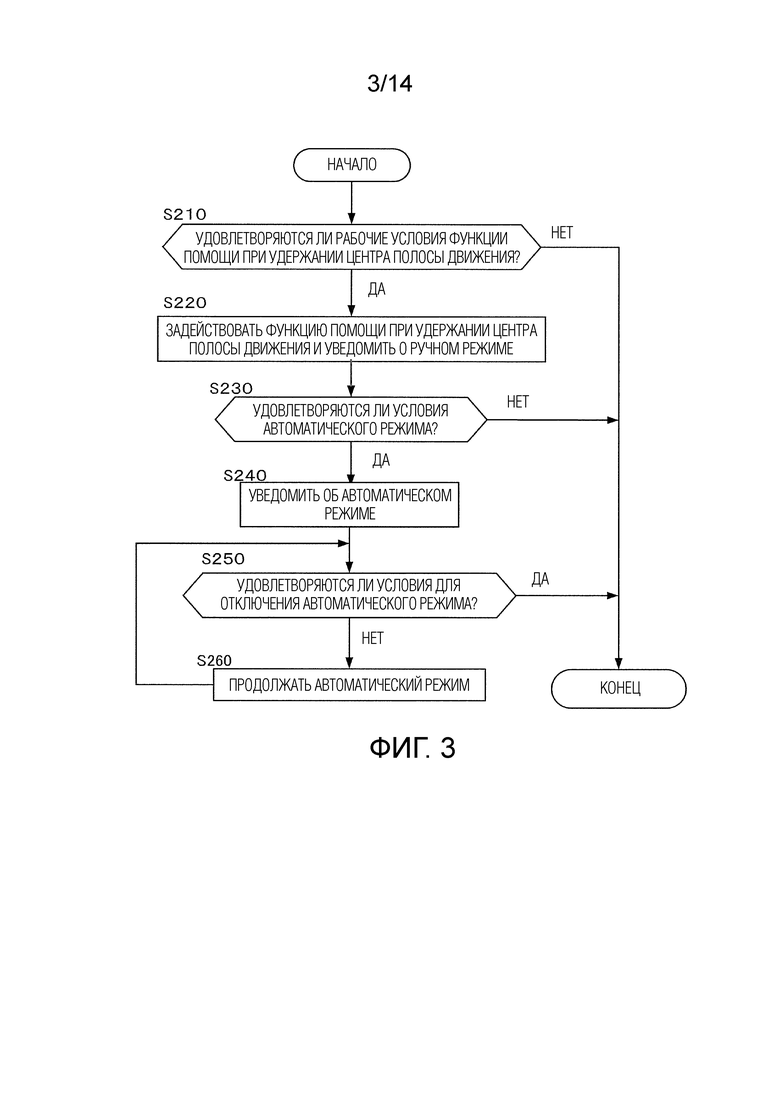




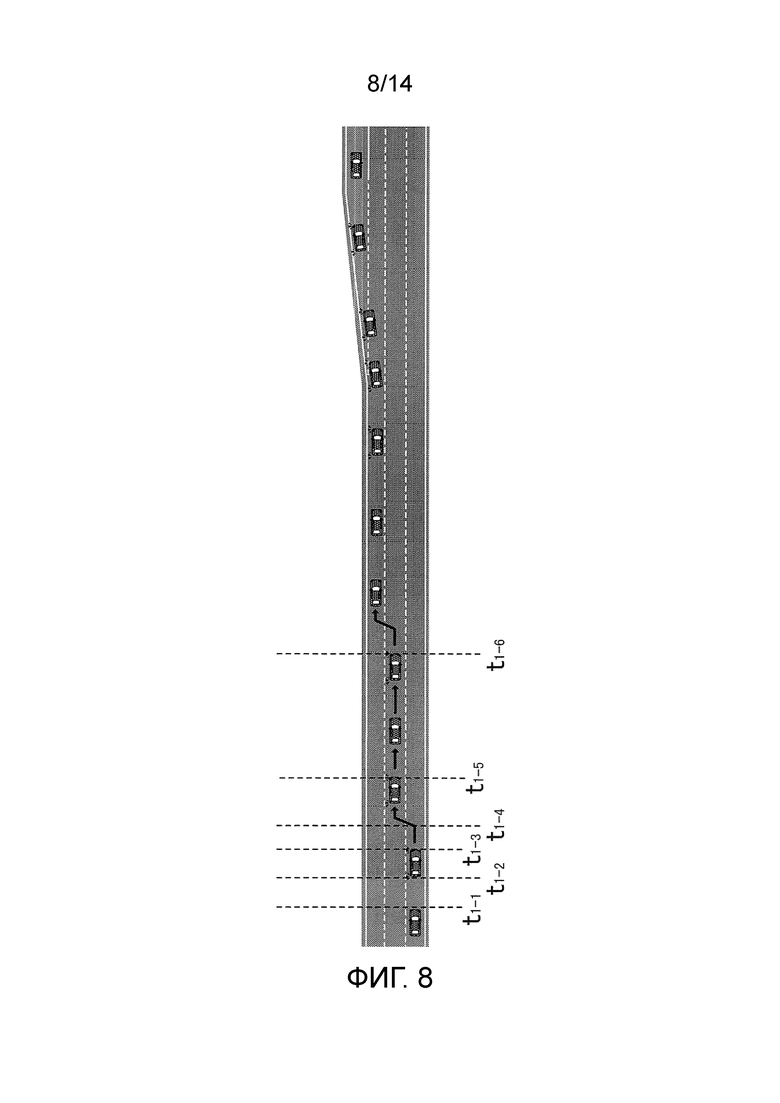




Изобретение относится к способу помощи при вождении и системе помощи при вождении. Способ помощи при вождении, заключающийся в получении информации о состоянии водителя во время движения с автономным вождением и выдаче предупреждения водителю посредством контроллера, когда контроллер определяет, что водитель не обращен вперед, на основе информации о состоянии водителя. Способ помощи при вождении содержит: для движения с автономным вождением обеспечен автоматический режим, выполняемый в состоянии, когда водитель отпускает руки с ручки в автоматическом режиме после того, как предупреждение выдано водителю, автоматический режим продолжается, когда водитель обращен вперед в течение заданного времени. Система помощи при вождении содержит датчик, выполненный с возможностью обнаружения состояния водителя во время движения с автономным вождением, и контроллер, выполненный с возможностью выдачи предупреждения водителю, когда определено, что водитель не обращен вперед. Достигается повышение безопасности водителя транспортного средства. 2 н. и 7 з.п. ф-лы, 15 ил.
1. Способ помощи при вождении, заключающийся в получении информации о состоянии водителя во время движения с автономным вождением и выдаче предупреждения водителю посредством контроллера, когда контроллер определяет, что водитель не обращен вперед, на основе информации о состоянии водителя, способ помощи при вождении содержит:
для движения с автономным вождением обеспечен автоматический режим, выполняемый в состоянии, когда водитель отпускает руки с ручки,
в автоматическом режиме после того, как предупреждение выдано водителю, автоматический режим продолжается, когда водитель обращен вперед в течение заданного времени.
2. Способ помощи при вождении по п. 1, дополнительно содержащий:
определение того, необходима ли смена полосы движения транспортного средства;
уведомление водителя о смене полосы движения, когда определено, что смена полосы движения необходима; и
запрещение предупреждения, когда водитель обращен в направлении смены полосы движения после того, как водитель уведомлен о смене полосы движения.
3. Способ помощи при вождении по п. 1, дополнительно содержащий:
обнаружение рабочего состояния указателя поворота; и
запрещение предупреждения, когда водитель обращен в направлении смены полосы движения после включения указателя поворота, при этом
направление смены полосы движения представляет собой направление работы указателя поворота.
4. Способ помощи при вождении по любому из пп. 1-3, в котором:
предупреждение выдается водителю, когда водитель управляет транспортным средством, не будучи обращенным вперед в течение первого заданного времени или дольше, и
когда водитель обращен в направлении смены полосы движения, предупреждение запрещается до тех пор, пока время, в течение которого водитель обращен в направлении смены полосы движения, не превысит второе заданное время дольше, чем первое заданное время.
5. Способ помощи при вождении по любому из пп. 1-4, в котором:
автоматический режим разрешен до тех пор, пока водителю не будет выдано предупреждение.
6. Способ помощи при вождении по п. 5, в котором:
для движения с автономным вождением дополнительно обеспечен ручной режим, выполняемый в состоянии, когда водитель держит руки на ручке, и
в автоматическом режиме после того, как предупреждение выдано водителю, автоматический режим продолжается, когда водитель обращен вперед в течение третьего заданного времени, и движение с автономным вождением продолжается в ручном режиме, когда водитель обращен вперед в течение четвертого заданного времени после истечения третьего заданного времени.
7. Способ помощи при вождении по п. 6, в котором:
предупреждение выдается водителю путем приведения в действие тормоза множество раз, когда водитель не обращен вперед, даже по истечении четвертого заданного времени после того, как предупреждение выдается водителю в автоматическом режиме.
8. Способ помощи при вождении по п. 7, в котором
обеспечен блок обнаружения, выполненный с возможностью обнаружения того, что водитель держит руки на ручке, и
после того, как тормоз приводится в действие множество раз для предупреждения водителя, тормоз дополнительно приводится в действие для принудительной остановки транспортного средства, когда водитель не держит ручку даже по истечении пятого заданного времени.
9. Система помощи при вождении, содержащая:
датчик, выполненный с возможностью обнаружения состояния водителя во время движения с автономным вождением; и
контроллер, выполненный с возможностью выдачи предупреждения водителю, когда определено, что водитель не обращен вперед, на основании состояния водителя, обнаруженного датчиком, при этом
для движения с автономным вождением обеспечен автоматический режим, выполняемый в состоянии, когда водитель отпускает руки с ручки,
в автоматическом режиме после того, как предупреждение выдано водителю, контроллер продолжает автоматический режим, когда водитель обращен вперед в течение заданного времени.
| US 20180141570 A1, 24.05.2018 | |||
| JP 2014181020 A, 29/09/2014 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2016 |
|
RU2622616C1 |

