Область техники, к которой относится изобретение
Настоящее изобретение относится к области техники автоматического управления транспортным средством, и, в частности, оно относится к транспортному средству, а также к способу и системе управления отклонением при торможении такого транспортного средства.
Предпосылки изобретения
Тормозная характеристика транспортных средств (например, автомобилей, бензиновых или дизельных трициклов и т. п.) является одной из основных характеристик транспортных средств. Тормозная характеристика непосредственно связана с безопасностью дорожного движения, а дорожные происшествия со смертельным исходом всегда связаны со случаями заноса и т. п. по причине слишком длинного тормозного пути и внезапного торможения, поэтому тормозная характеристика транспортных средств является важным залогом безопасного движения транспортных средств. Улучшение тормозной характеристики транспортных средств всегда является важной задачей для отделов разработки, изготовления и эксплуатации транспортных средств. Транспортное средство автоматически отклоняется влево или вправо во время торможения, что называется «отклонением при торможении». Отклонение при торможении обусловлено следующими двумя причинами: 1) тормоза левых и правых колес транспортного средства обладают неодинаковым тормозным усилием; и 2) система направляющих подвески и тяга системы рулевого управления не согласованы друг с другом (мешают работе друг друга) во время торможения.
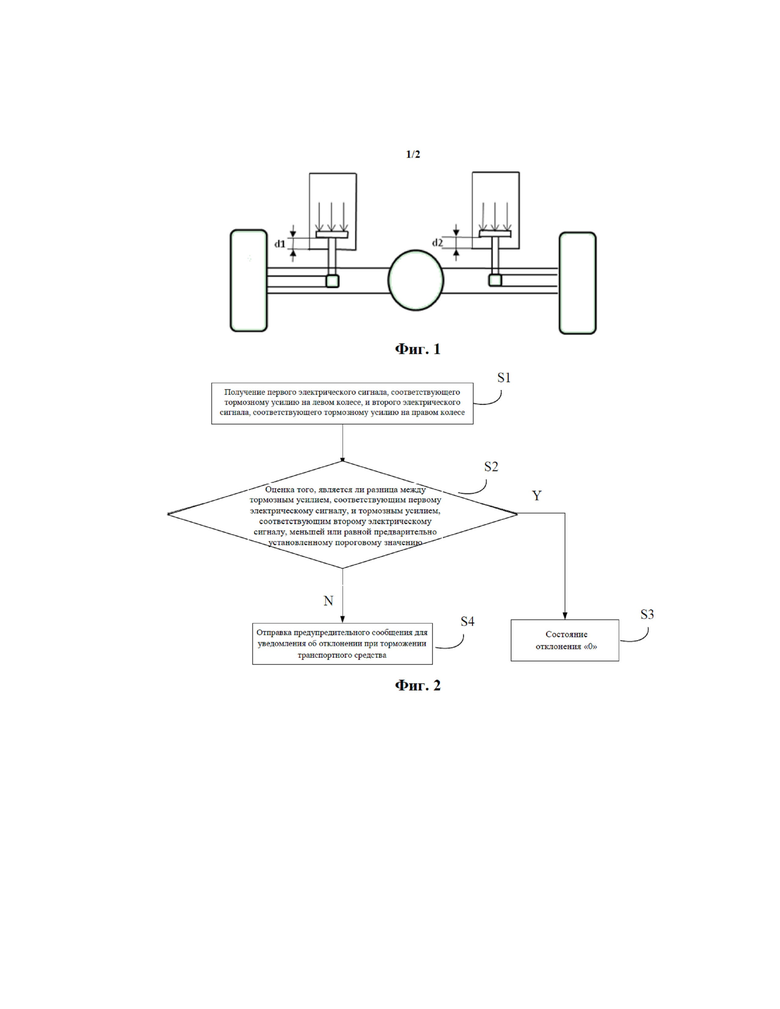
Как показано на фиг. 1, давление воздуха приводит в движение поршень во время торможения, шток толкателя поршня в цилиндре укорачивается, и чем выше давление воздуха, тем короче шток толкателя поршня в цилиндре. Как показано на фигуре, если возникает разница Δd между длинами d1 и d2 штоков толкателя поршня в цилиндрах, соответствующих двум тормозам колеса, то может возникнуть отклонение при торможении, и чем больше Δd, тем значительнее отклонение.
При применении вышеупомянутого режима механического управления для торможения сообщение об отклонении транспортного средства не может быть получено вовремя, так что в процессе движения присутствуют возможные угрозы безопасности.
В документе US3723965A, раскрывающем устройство для управления электронными системами управления и их отслеживания для торможения колесных транспортных средств (легковых автомобилей), предусмотрены датчики скорости, по одному для каждого управляемого колеса, при этом выходные сигналы каждого датчика используются детектором для обнаружения относительных изменений в скорости колеса. Детектор управляет несколькими электромагнитными клапанами для регулирования давлений при торможении отдельных колес, так что предотвращается блокирование и проскальзывание какого-либо колеса.
Сущность изобретения
Настоящее изобретение предназначено для решения технической проблемы, заключающейся в том, что в предшествующем уровне техники сообщение об отклонении транспортного средства во время торможения не может быть получено вовремя.
Для решения вышеупомянутой технической проблемы согласно настоящему изобретению предлагается следующее техническое решение.
Способ управления отклонением при торможении транспортного средства, включающий следующие этапы:
получение первого электрического сигнала, соответствующего тормозному усилию на левом колесе, и второго электрического сигнала, соответствующего тормозному усилию на правом колесе;
оценку того, является ли разница между тормозным усилием, соответствующим первому электрическому сигналу, и тормозным усилием, соответствующим второму электрическому сигналу, меньшей или равной предварительно установленному пороговому значению; и
отправку предупредительного сообщения для уведомления об отклонении при торможении транспортного средства в случае превышения разницей предварительно установленного порогового значения.
Предпочтительно, на этапе получения первого электрического сигнала, соответствующего тормозному усилию на левом колесе, и второго электрического сигнала, соответствующего тормозному усилию на правом колесе:
первый электрический сигнал получают путем преобразования длины штока поршня в цилиндре, соответствующем левому колесу; и
второй электрический сигнал получают путем преобразования длины штока поршня в цилиндре, соответствующем правому колесу.
Предпочтительно, на этапе получения первого электрического сигнала, соответствующего тормозному усилию на левом колесе, и второго электрического сигнала, соответствующего тормозному усилию на правом колесе:
первый электрический сигнал получают путем преобразования давления в цилиндре, соответствующем левому колесу; и
второй электрический сигнал получают путем преобразования давления в цилиндре, соответствующем правому колесу.
Предпочтительно, после этапа отправки предупредительного сообщения для уведомления об отклонении транспортного средства в случае превышения разницей предварительно установленного порогового значения способ дополнительно включает следующие этапы:
оценку того, является ли разница меньшей или равной пороговому значению отклонения;
если да, то вывод первого сообщения о состоянии отклонения;
если нет, вывод второго сообщения о состоянии отклонения и ограничение максимального тормозного момента транспортного средства.
Предпочтительно, этап оценки того, является ли разница между первым электрическим сигналом и вторым электрическим сигналом меньшей, чем предварительно установленное пороговое значение, включает
осуществление стабилизирующей обработки в отношении разницы с целью устранения мгновенных ненормальных возмущающих сигналов.
Согласно настоящему изобретению также предлагается система управления отклонением при торможении транспортного средства, содержащая:
первый блок получения данных для получения первого параметра, соответствующего тормозному усилию на левом колесе, и преобразования первого параметра в первый электрический сигнал для вывода;
второй блок получения данных для получения второго параметра, соответствующего тормозному усилию на правом колесе, и преобразования второго параметра во второй электрический сигнал для вывода;
блок обработки данных для приема первого электрического сигнала и второго электрического сигнала и оценки того, является ли разница между тормозным усилием, соответствующим первому электрическому сигналу, и тормозным усилием, соответствующим второму электрическому сигналу, меньшей или равной предварительно установленному пороговому значению; и
блок подачи сигнала для отправки предупредительного сообщения для уведомления об отклонении транспортного средства в случае превышения разницей предварительно установленного порогового значения.
Предпочтительно, первый блок получения данных является датчиком положения для получения величины длины штока поршня в цилиндре, соответствующем левому колесу, в качестве первого параметра; и
второй блок получения данных является датчиком положения для получения величины длины штока поршня в цилиндре, соответствующем правому колесу, в качестве второго параметра.
Предпочтительно, первый блок получения данных является датчиком давления для получения величины давления в цилиндре, соответствующем левому колесу, в качестве первого параметра; и
второй блок получения данных является датчиком давления для получения величины давления в цилиндре, соответствующем правому колесу, в качестве второго параметра.
Предпочтительно, блок обработки данных дополнительно применяется для оценки того, является ли разница меньшей или равной пороговому значению отклонения; и
блок подачи сигнала дополнительно применяется для вывода первого сообщения о состоянии отклонения, если разница меньше или равна пороговому значению отклонения, а также для вывода второго сообщения о состоянии отклонения и ограничения максимального тормозного момента транспортного средства, если разница превышает пороговое значение отклонения.
Предпочтительно, блок обработки данных содержит стабилизирующий субблок для осуществления стабилизирующей обработки в отношении разницы с целью устранения мгновенных ненормальных возмущающих сигналов.
Согласно настоящему изобретению также предлагается транспортное средство, содержащее вышеупомянутую систему управления отклонением при торможении транспортного средства.
По сравнению с предшествующим уровнем техники, вышеупомянутое техническое решение согласно настоящему изобретению обладает следующими преимуществами.
(1) В способе и системе управления отклонением при торможении транспортного средства, а также в транспортном средстве согласно настоящему изобретению первый параметр, соответствующий тормозному усилию на левом колесе, и второй параметр, соответствующий тормозному усилию на правом колесе, соответствующим образом получают посредством электронных датчиков для получения первого электрического сигнала, способного отражать тормозное усилие на левом колесе, и второго электрического сигнала, способного отражать тормозное усилие на правом колесе, при этом отклонение между тормозными усилиями на двух колесах может быть получено путем анализа разницы между двумя сигналами: транспортное средство отклоняется, если отклонение между тормозными усилиями на двух колесах превышает установленное пороговое значение; и выводится предупредительное сообщение. Таким образом, можно отследить, отклоняется ли транспортное средство во время торможения, и предупредительное сообщение отправляется, если транспортное средство отклоняется, для уведомления водителя, так что в отношении отклонения транспортного средства могут быть приняты своевременные меры для устранения возможных угроз безопасности, вызванных отклонением.
(2) В способе и системе управления отклонением при торможении транспортного средства, а также в транспортном средстве согласно настоящему изобретению для разных состояний отклонения применяются разные меры. Если отклонение находится в допустимом диапазоне, то выводится первое сообщение о состоянии отклонения, и водителю вовремя сообщается о необходимости проверки, так что удается избежать негативных последствий, вызываемых отклонением. Если состояние отклонения превышает допустимый диапазон, то водителю об этом сообщается, и тормозные усилия транспортного средства ограничиваются, так что опасности удается избежать вовремя.
(3) В способе и системе управления отклонением при торможении транспортного средства, а также в транспортном средстве согласно настоящему изобретению стабилизирующая обработка осуществляется после получения разницы между двумя электрическими сигналами для устранения ошибки, вызванной мгновенным ненормальным возмущающим сигналом, и обеспечения точности обнаружения отклонения.
Краткое описание графических материалов
Для более простого и точного понимания сути настоящего изобретения настоящее изобретение будет дополнительно подробно описано ниже в сочетании с конкретными вариантами осуществления настоящего изобретения и прилагаемыми графическими материалами, в которых:
на фиг. 1 показана структурная схема пневматической системы барабанных тормозов;
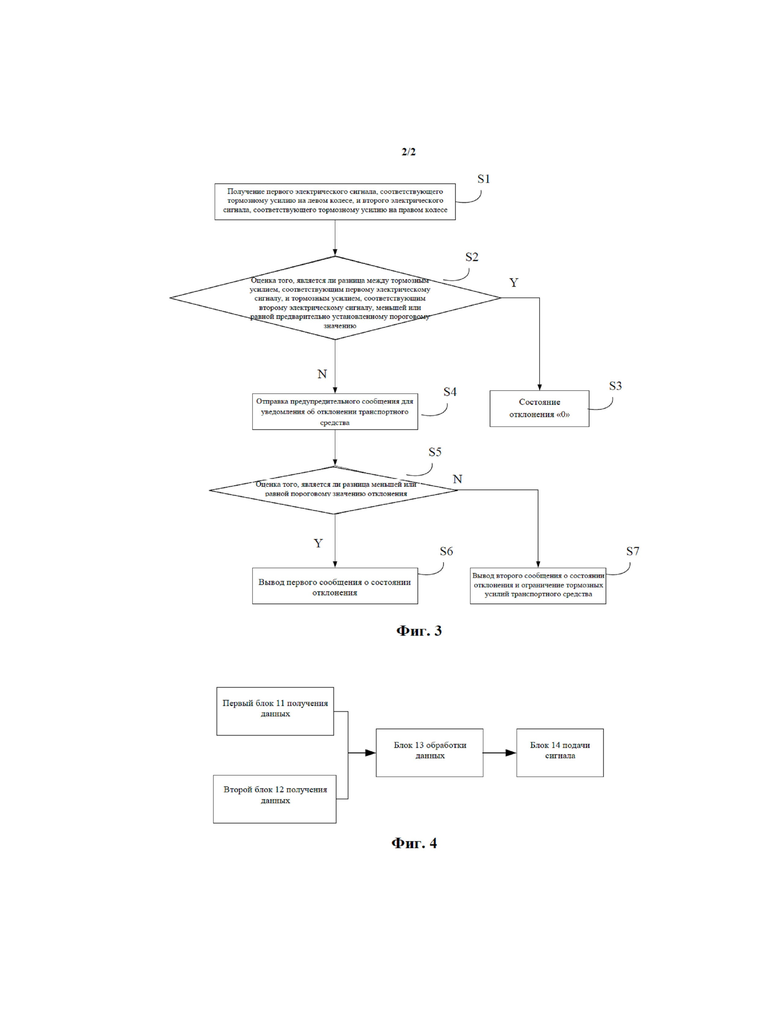
на фиг. 2 показана блок-схема способа управления отклонением при торможении транспортного средства в одном примере настоящего изобретения;
на фиг. 3 показана блок-схема способа управления отклонением при торможении транспортного средства в другом примере настоящего изобретения;
на фиг. 4 показана блок-схема системы управления отклонением при торможении транспортного средства в одном примере настоящего изобретения.
Подробное описание вариантов осуществления
Пример 1
В этом примере представлен способ управления отклонением при торможении транспортного средства, показанный на фиг. 2, включающий следующие этапы.
S1: получение первого электрического сигнала, соответствующего тормозному усилию на левом колесе, и второго электрического сигнала, соответствующего тормозному усилию на правом колесе, при этом тормозное усилие может быть отражено на основании следующего: длины штока поршня в цилиндре, давления в цилиндре и т. п. Действительно, после торможения транспортного средства длина штока поршня в цилиндре обратно пропорциональна давлению в цилиндре, поэтому одно из двух значений можно получить посредством другого значения.
S2: оценка того, является ли разница между тормозным усилием, соответствующим первому электрическому сигналу, и тормозным усилием, соответствующим второму электрическому сигналу, меньшей или равной предварительно установленному пороговому значению. Если меньше, то значение отклонения находится в допустимом диапазоне, никаких мер не требуется, и осуществляют этап S3; а если больше, то значение отклонения превышает допустимый диапазон, и осуществляют этап S4.
На этом этапе в разных системах тормозов могут применяться разные элементы для отображения тормозных усилий: например, в пневматической системе барабанных тормозов, если тормозное усилие отображено длиной штока поршня в цилиндре, предварительно установленное пороговое значение в таком случае может быть разницей между длиной штока поршня в цилиндре, соответствующем левому колесу, и длиной штока поршня в цилиндре, соответствующем правому колесу. Если тормозное усилие отображено давлением в цилиндре, то предварительно установленное пороговое значение в этом случае может быть пороговым значением из разницы между давлением в цилиндре, соответствующем левому колесу, и давлением в цилиндре, соответствующем правому колесу. Аналогично приведенному выше решению для оценки также могут применяться другие параметры, такие как усилие, приложенное к останавливаемым колесам или в других местах. Если осуществляется сравнение разницы с предварительно установленным пороговым значением, то необходимо обеспечить, чтобы они оба были одинаковым параметром.
На этом этапе, для оценки длину штока поршня или давление в цилиндре можно также преобразовать в тормозное усилие с помощью коэффициента преобразования, и в этот момент предварительно установленное пороговое значение является пороговым значением непосредственно из разницы между тормозным усилием на левом колесе и тормозным усилием на правом колесе.
Указанное выше предварительно установленное пороговое значение выбирают согласно условиям применения на практике, и результаты, полученные для разных транспортных средств, могут быть разными. Предварительно установленное пороговое значение может быть выбранным по результатам испытания проводимого несколько раз испытания транспортного средства.
S3: вывод сообщения с состоянием отклонения «0».
S4: отправка предупредительного сообщения для уведомления об отклонении при торможении транспортного средства. Режим сигнализации может представлять собой загорание сигнальной лампы неисправности, звучание предупредительного сигнала и т. п.
Для дополнительной оптимизации приведенного выше примера, как показано на фиг. 3, после этапа S4 способ дополнительно включает следующие этапы.
S5: оценка того, является ли разница меньшей или равной пороговому значению отклонения: если меньше, то происходит переход к этапу S6, если нет, то происходит переход к этапу S7.
S6: если да, то вывод первого сообщения о состоянии отклонения. Первое сообщение о состоянии отклонения может быть «1», и при таком условии значение отклонения находится в допустимом диапазоне, поэтому водителю отображается лишь сообщение об отклонении.
S7: если нет, вывод второго сообщения о состоянии отклонения и ограничение тормозных усилий транспортного средства. Второе сообщение о состоянии отклонения может быть «2», и при таком условии значение отклонения превышает допустимый диапазон, и в любой момент может возникнуть опасность, поэтому кроме того, что водителю отображается сообщение об отклонении, тормозные усилия транспортного средства на этом этапе ограничиваются для ограничения максимального тормозного момента транспортного средства, и, таким образом, обеспечивается личная безопасность людей в транспортном средстве.
Следовательно, предварительно установленное пороговое значение на этапе S2 применяется для оценки того, происходит ли отклонение при торможении в текущий момент, тогда как пороговое значение отклонения на этапе S5 применяется для оценки степени текущего отклонения при торможении, при этом пороговое значение отклонения может превышать предварительно установленное пороговое значение, и после оценки того, что отклонение при торможении происходит, в зависимости от степени текущего отклонения при торможении могут быть предприняты разные соответствующие меры, так что способ управления согласно настоящему изобретению является более оптимальным.
Кроме того, предпочтительно, этап S2 дополнительно включает стабилизирующую обработку в отношении разницы с целью устранения мгновенных ненормальных возмущающих сигналов, и, таким образом, обеспечивается точность обнаружения отклонения.
Пример 2
В этом примере представлена система управления отклонением при торможении транспортного средства, как показано на фиг. 4, содержащая первый блок 11 получения данных, второй блок 12 получения данных, блок 13 обработки данных и блок 14 подачи сигнала.
Первый блок 11 получения данных применяется для получения первого параметра, соответствующего тормозному усилию на левом колесе, и преобразования первого параметра в первый электрический сигнал для вывода.
Второй блок 12 получения данных применяется для получения второго параметра, соответствующего тормозному усилию на правом колесе, и преобразования второго параметра во второй электрический сигнал для вывода.
В качестве альтернативы первый блок 11 получения данных представляет собой датчик положения и получает величину длины штока поршня в цилиндре, соответствующем левому колесу, в качестве первого параметра; второй блок 12 получения данных представляет собой датчик положения и получает величину длины штока поршня в цилиндре, соответствующем правому колесу, в качестве второго параметра. Также в качестве альтернативы первый блок 11 получения данных представляет собой датчик давления и получает величину давления в цилиндре, соответствующем левому колесу, в качестве первого параметра; второй блок 12 получения данных представляет собой датчик давления и получает величину давления в цилиндре, соответствующем правому колесу, в качестве второго параметра. Действительно, после торможения транспортного средства длина штока поршня в цилиндре обратно пропорциональна давлению в цилиндре, поэтому одно из двух значений можно получить посредством другого значения.
Блок 13 обработки данных применяется для приема первого электрического сигнала и второго электрического сигнала и оценки того, является ли разница между тормозным усилием, соответствующим первому электрическому сигналу, и тормозным усилием, соответствующим второму электрическому сигналу, меньшей или равной предварительно установленному пороговому значению. Если тормозное усилие отображается длиной штока поршня в цилиндре, то предварительно установленное пороговое значение в этом случае может быть пороговым значением из разницы между длиной штока поршня в цилиндре, соответствующем левому колесу, и длиной штока поршня в цилиндре, соответствующем правому колесу. Если тормозное усилие отображено давлением в цилиндре, то предварительно установленное пороговое значение в этом случае может быть пороговым значением из разницы между давлением в цилиндре, соответствующем левому колесу, и давлением в цилиндре, соответствующем правому колесу. Аналогично приведенному выше решению для оценки также могут применяться другие параметры, и во время сравнения разницы с предварительно установленным пороговым значением необходимо обеспечить, чтобы они оба были одинаковым параметром. Для оценки длину штока поршня или давление в цилиндре можно также преобразовать в тормозное усилие с помощью коэффициента преобразования, и в этот момент предварительно установленное пороговое значение является пороговым значением непосредственно из разницы между тормозным усилием на левом колесе и тормозным усилием на правом колесе. Указанное выше предварительно установленное пороговое значение выбирают согласно условиям применения на практике, и результаты, полученные для разных транспортных средств, могут быть разными. Предварительно установленное пороговое значение может быть выбранным по результатам испытания проводимого несколько раз испытания транспортного средства.
Блок 14 подачи сигнала применяется для отправки предупредительного сообщения для уведомления об отклонении транспортного средства в случае превышения разницей предварительно установленного порогового значения. Режим сигнализации может представлять собой загорание сигнальной лампы неисправности, звучание предупредительного сигнала и т. п.
Предпочтительно, блок 13 обработки данных дополнительно применяется для оценки того, является ли разница меньшей или равной пороговому значению отклонения. Блок 14 подачи сигнала дополнительно применяется для вывода первого сообщения о состоянии отклонения, если разница меньше или равна пороговому значению отклонения; первое сообщение о состоянии отклонения может быть «1», и при таком условии значение отклонения находится в допустимом диапазоне, поэтому водителю отображается лишь сообщение об отклонении.
Если разница превышает пороговое значение отклонения, то выводится второе сообщение о состоянии отклонения и ограничивается максимальный тормозной момент транспортного средства. Второе сообщение о состоянии отклонения может быть «2», и при таком условии значение отклонения превышает допустимый диапазон, и в любой момент может возникнуть опасность, поэтому кроме того, что водителю отображается сообщение об отклонении, тормозные усилия транспортного средства на этом этапе ограничиваются для ограничения максимального тормозного момента транспортного средства, и, таким образом, обеспечивается личная безопасность людей в транспортном средстве.
Кроме того, предпочтительно, блок 14 подачи сигнала дополнительно содержит стабилизирующий субблок для стабилизирующей обработки в отношении разницы с целью устранения мгновенных ненормальных возмущающих сигналов, и, таким образом, обеспечивается точность обнаружения отклонения.
Пример 3
В этом примере представлено транспортное средство, содержащее систему управления отклонением при торможении транспортного средства, представленную в примере 2. Транспортное средство может быть электрическим транспортным средством или другим транспортным средством, содержащим устройство управления транспортным средством. Устройство управления транспортным средством в транспортном средстве может применяться как блок обработки данных. Сигналы, полученные первым блоком получения данных и вторым блоком получения данных, преобразовываются в цифровые сигналы с помощью аналого-цифрового преобразования и вводятся в устройство управления транспортным средством. Разумеется, аналого-цифровое преобразование может также предусматриваться в устройстве управления транспортным средством, и данные, полученные первым блоком получения данных и вторым блоком получения данных, непосредственно вводятся в модуль аналого-цифрового преобразования в устройстве управления транспортным средством. Транспортное средство, представленное в этом примере, может вовремя определить свое состояние отклонения и принять разные меры для разных значений отклонения; благодаря этому удается избежать возможных угроз безопасности, вызываемых отклонением при торможении транспортного средства, и обеспечить безопасность людей в транспортном средстве.
Несмотря на то, что примеры настоящего изобретения описаны в сочетании с прилагаемыми графическими материалами, специалистами в данной области техники могут быть предложены различные модификации и изменения без отступления от сути и объема настоящего изобретения. Эти модификации и изменения должны входить в объем правовой охраны, определенный прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тормозная система транспортного средства | 1990 |
|
SU1757937A1 |
| Система управления торможением транспортного средства | 1987 |
|
SU1416349A1 |
| ВСПОМОГАТЕЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2570191C2 |
| СПОСОБ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2005 |
|
RU2304531C2 |
| Способ и система для замедления транспортного средства | 2017 |
|
RU2717608C2 |
| ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА И ГИДРАВЛИЧЕСКАЯ ТОРМОЗНАЯ СИСТЕМА | 1990 |
|
RU2041090C1 |
| Устройство управления торможением колес транспортного средства | 1979 |
|
SU867732A1 |
| ТОРМОЗНАЯ СИСТЕМА И СПОСОБ ТОРМОЖЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2500556C2 |
| Транспортное средство | 1980 |
|
SU962039A1 |
| ЖЕЛЕЗНОДОРОЖНАЯ ТОРМОЗНАЯ СИСТЕМА ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ТОРМОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА, СОДЕРЖАЩЕГО ТАКУЮ СИСТЕМУ | 2017 |
|
RU2735736C2 |
Изобретение относится к системам безопасности транспортного средства. Способ управления отклонением при торможении транспортного средства включает этапы получения первого электрического сигнала и второго электрического сигнала, оценки того, является ли разница между тормозным усилием, соответствующим первому электрическому сигналу, и тормозным усилием, соответствующим второму электрическому сигналу, меньшей или равной предварительно установленному пороговому значению, и отправки предупредительного сообщения. Первый электрический сигнал соответствует тормозному усилию на левом колесе, измеряемому путем преобразования длины штока поршня в цилиндре, соответствующем левому колесу. Второй электрический сигнал соответствует тормозному усилию на правом колесе, измеряемому путем преобразования длины штока поршня в цилиндре, соответствующем правому колесу. Достигается повышение безопасности транспортного средства. 2 н. и 5 з.п. ф-лы, 4 ил.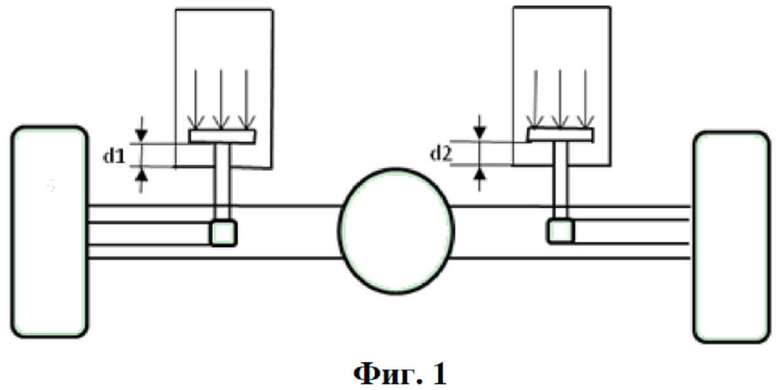
1. Способ управления отклонением при торможении транспортного средства, включающий следующие этапы:
получение первого электрического сигнала, соответствующего тормозному усилию на левом колесе, путем преобразования длины штока поршня в цилиндре, соответствующем левому колесу, и второго электрического сигнала, соответствующего тормозному усилию на правом колесе, путем преобразования длины штока поршня в цилиндре, соответствующем правому колесу;
оценку того, является ли разница между тормозным усилием, соответствующим первому электрическому сигналу, и тормозным усилием, соответствующим второму электрическому сигналу, меньшей или равной предварительно установленному пороговому значению; и
отправку предупредительного сообщения для уведомления об отклонении при торможении транспортного средства в случае превышения разницей предварительно установленного порогового значения.
2. Способ по п. 1, отличающийся тем, что после этапа отправки предупредительного сообщения для уведомления об отклонении транспортного средства в случае превышения разницей предварительно установленного порогового значения способ дополнительно включает следующие этапы:
оценку того, является ли разница меньшей или равной пороговому значению отклонения;
если да, то вывод первого сообщения о состоянии отклонения;
если нет, то вывод второго сообщения о состоянии отклонения и ограничение максимального тормозного момента транспортного средства.
3. Способ по п. 1, отличающийся тем, что этап оценки того, является ли разница между первым электрическим сигналом и вторым электрическим сигналом меньшей, чем предварительно установленное пороговое значение, включает
осуществление стабилизирующей обработки в отношении разницы с целью устранения мгновенных ненормальных возмущающих сигналов.
4. Система управления отклонением при торможении транспортного средства, содержащая:
первый блок получения данных для получения первого параметра, соответствующего тормозному усилию на левом колесе, и преобразования первого параметра в первый электрический сигнал для вывода, при этом первый блок получения данных является датчиком положения для получения величины длины штока поршня в цилиндре, соответствующем левому колесу, в качестве первого параметра;
второй блок получения данных для получения второго параметра, соответствующего тормозному усилию на правом колесе, и преобразования второго параметра во второй электрический сигнал для вывода, при этом второй блок получения данных является датчиком положения для получения величины длины штока поршня в цилиндре, соответствующем правому колесу, в качестве второго параметра;
блок обработки данных для приема первого электрического сигнала и второго электрического сигнала и оценки того, является ли разница между тормозным усилием, соответствующим первому электрическому сигналу, и тормозным усилием, соответствующим второму электрическому сигналу, меньшей или равной предварительно установленному пороговому значению; и
блок подачи сигнала для отправки предупредительного сообщения для уведомления об отклонении транспортного средства в случае превышения разницей предварительно установленного порогового значения.
5. Система по п. 4, отличающаяся тем, что
блок обработки данных дополнительно применяется для оценки того, является ли разница меньшей или равной пороговому значению отклонения; и
блок подачи сигнала дополнительно применяется для вывода первого сообщения о состоянии отклонения, если разница меньше или равна пороговому значению отклонения, а также для вывода второго сообщения о состоянии отклонения и ограничения максимального тормозного момента транспортного средства, если разница превышает пороговое значение отклонения.
6. Система по п. 4, отличающаяся тем, что
блок обработки данных содержит стабилизирующий субблок для осуществления стабилизирующей обработки в отношении разницы с целью устранения мгновенных ненормальных возмущающих сигналов.
7. Транспортное средство, содержащее систему управления отклонением при торможении транспортного средства по любому из пп. 4-6.
| US 5795039 A1, 18.08.1998 | |||
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И УЗЕЛ ТОРМОЗНОГО УСТРОЙСТВА | 1992 |
|
RU2068350C1 |
| Устройство управления торможением транспортного средства | 1986 |
|
SU1452474A3 |
| US 4836618 A1, 06.06.1989. | |||

