i4
ел to
4iib
Ч
4
Изобретение относится к системам электронного управления торможением транспортных средств.
Цель изобретения - повышение эффективности управления торможением,
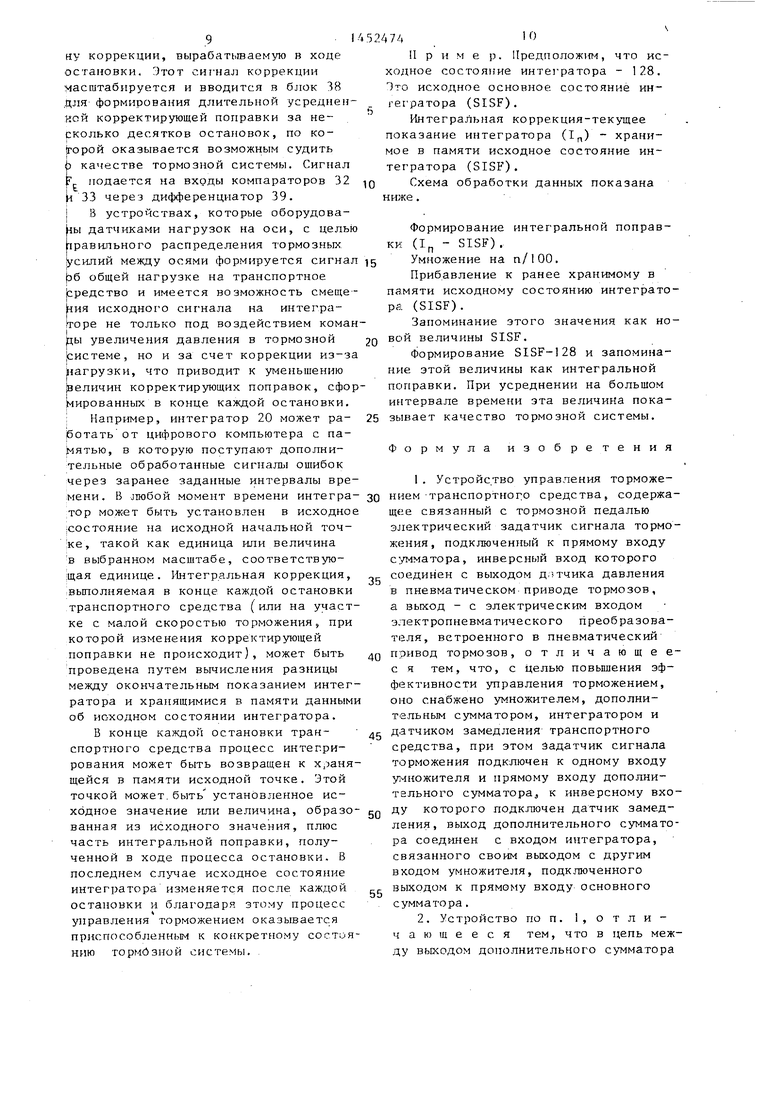
На фиг, I изображена блок-схема устройства управления торможением транспортного средства; на фиг.2 - более подробная блок-схема, изобра- женная на фиг.1; на фиг. 3 - система управления интегратором.
Устройство имеет цепь управле-- ния давлением, на которую подается входной электрический сигнал Г с за- датчика 2, расположенного на тормозной педали, который сравнивается с выходным сигналом Р, датчика 3 давления и образуется сигнал ошибки Е, который подается на вход логическо- го устройства 4 управления давлением, выходной сигнал с которого вызывает изменение давления с помощью электропневматического или электрогидравлического преобразователя 5 в таком направлении, что амплитуда сигнала ошибки Е уменьшается. Преоб- |разователь 5 запитывается от резер- :вуара 6 со сжатым воздз/хом или жидiKOCTЬЮ.
i Схема и конструкция устройства 4 ;управления давлением определяется |типом используемого преобразователя |5. Известны преобразователи двух ти- пов: аналоговый преобразователь, в :котором вькодное давление клапана устанавливается пропорциональным ток ;через соленоид, и цифровой преобразо |Ватель, показанный на фиг.1, в кото- jpoM пара простых соленоидных клапа- JHOB 7 и 8 работает так, чтобы увели- чить или уме;а.шать давление в камере причем работа этих клапанов опреде- ляетс я выбором тока через них.. Кажды пневмопреобразователь имеет переходный клапан 9,, кото.рый реагирует на давление в камере и приходит в рабочее состояние, когда усилие торможения в приводах 10 и 11 тормозов 12 становится равным упомянутому контрольному давлению. Давление в камере быстро изменяется при открытии клапана, что обеспечивает быстрое срабатывание цепи управления, делая устройство точным и чувствительным.
Устройство содержит также блок 13 управления торможением, который преобразует сигнал D, поступающий непосредственно с задатчика 2 тормозной
Q
15 20 25
5
педали, до того, как этот сигнал поступит на устройство 4. На практике сигналы обычно поступают раздельно: для передней оси - D и задней оси - DR, а в сложных системах могут поступать раздельно по четырем каналам. Сигналы нагрузки L формируют один или более датчиков 14 нагрузки на , транспортном средстве 15, а сигналь замедления F движения транспортного средства поступают от деселеромет- ра 16. торможения от передней и задней осей - В и Вр - подаются на тормоза транспортного средства (на фиг.) показана стрелками.
Сигналы D в первом сумматоре-вычи- тателе 17 сравниваются с сигналом F, поступающим от деселерометра 16, и образуется сигнал ошибки Е, который поступает на блок 13 вместе с сигналом нагрузки L на оси. Результирующие скорректированные сигналы ошибок F,., (передний) и R (задний) поступают на второй сумматор-вьиитатель 18 вместе с сигналом D с задатчика 2 и сигналом Р, для формирования сигнала ошибки Е, поступающего на устройство 4.
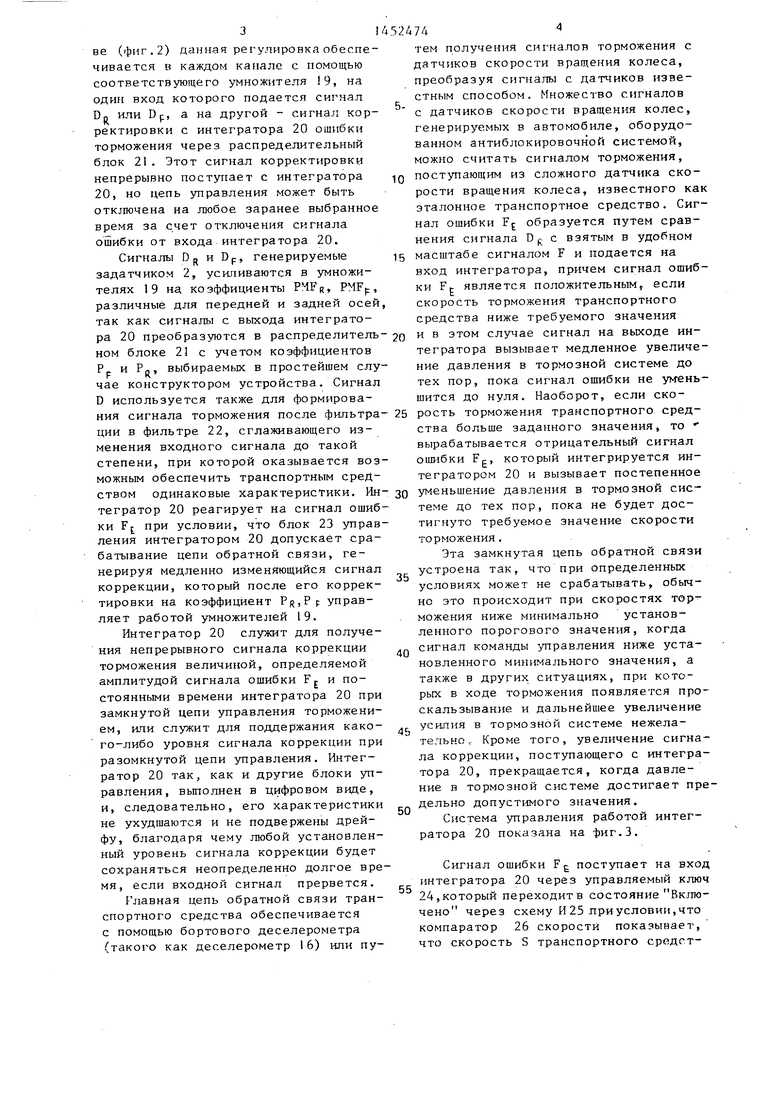
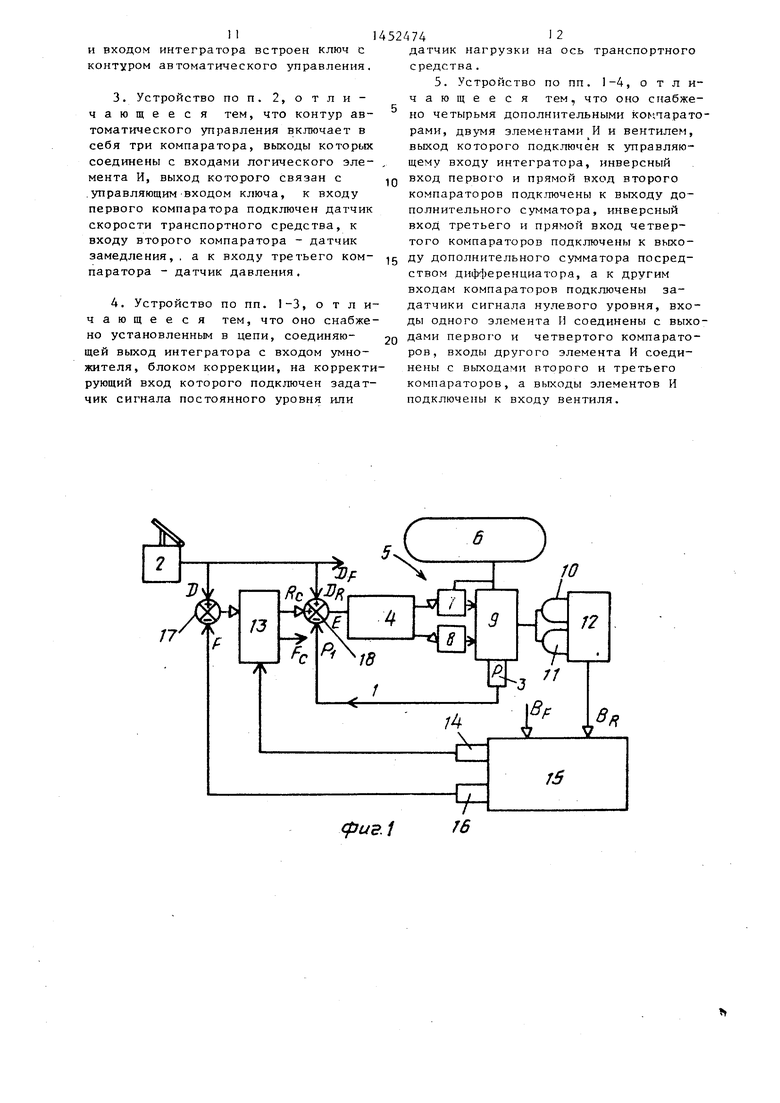
На фиг.2 подробно показано устрой- .ство управления.
В данном устройстве команды управления торможением транспортного средства в виде электрических сигналов снимаются с задатчика 2 на педали и подаются на умножитель 19, который вьщает команды изменения давления для цепей торможения на каждую ось или колесо транспортного средства и имеет блоки управления давлением с замкнутыми цепями обратной связи, имеющие электропневматические и электрогидравлические клапаны 7 и 8 управления и элементы обратной связи.
Б устройстве, показанном на фиг.З, на цепь управления давлением сигналы D поступают так, как в устройст- ве, показанном на фиг. 2, но они объединены в одной обШей системе управления торможением, в которой сигналы ошибок Fg, образуемые как разность между сигналом торможением D и измеренной величиной сигнала F, используются для регулировки сигналов команды торможения так, чтобы .обеспечить действие интегральной системы управления, благодаря чему измеренная величина торможения станет равной требуемой величине. В устройст31
ве (фиг.2) данная регулировка обеспечивается в каждом канале с помощью соответствующего умножителя 9, на один вход которого подается сигнал DO или Dp, а на другой - сигнал корректировки с интегратора 20 ошибки торможения через распределительный блок 21. Этот сигнал корректировки непрерывно поступает с интегратора 20, но цепь управления может быть отключена на любое заранее выбранное время за счет отключения сигнала ошибки от входа интегратора 20.
Сигналы D и Dp, генерируемые задатчиком 2, усиливаются в умножителях 19 на коэффициенты , PMFp, различные для передней и задней осей так как сигналы с выхода интегратора 20 преобразуются в распределитель ном блоке 21 с учетом коэффициентов
Р- и F,
выбираемых в простейшем случае конструктором устройства. Сигнал D используется также для формирования сигнала торможения после фильтрации в фильтре 22, сглаживающего изменения входного сигнала до такой степени, при которой оказывается возможным обеспечить транспортным средством одинаковые характеристики. Интегратор 20 реагирует на сигнал ошибки F при условии, что блок 23 управления интегратором 20 допускает срабатывание цепи обратной связи, генерируя медленно изменяющийся сигнал коррекции, который после его корректировки на коэффициент PR,Pf управляет работой умножителей 19.
Интегратор 20 служит для получения непрерывного сигнала коррекции торможения величиной, определяемой амплитудой сигнала ошибки F и постоянными времени интегратора 20 при замкнутой цепи управления торможением, ипи служит для поддержания какого-либо уровня сигнала коррекции при разомкнутой цепи управления. Интегратор 20 так, как и другие блоки управления, выполнен в цифровом виде, и, следовательно, его характеристики не ухудшаются и не подвержены дрейфу, благодаря чему любой установленный уровень сигнала коррекции будет сохраняться неопределенно долгое время, если входной сигнал прервется.
Главная цепь обратной связи транспортного средства обеспечивается с помощью бортового деселерометра (такого как деселерометр 16) или пу
5
0
5
0
5
0
74
тем получения сигналов торможения с датчиков скорости вращения колеса, преобразуя сигналы с датчиков известным способом. Множество сигналов с датчиков скорости вращения колес, генерируемых в автомобиле, оборудованном антиблокировочной системой, можно считать сигналом торможения, поступающим из сложного датчика скорости вращения колеса, известного как эталонное транспортное средство. Сигнал ошибки FJ образуется путем сравнения сигнала D | с взятым в удобном масштабе сигналом F и подается на вход интегратора, причем сигнал ошибки FJ- является положительным5 если скорость торможения транспортного средства ниже требуемого значения н в этом случае сигнал на выходе интегратора вызывает медленное увеличение давления в тормозной системе до тех пор, пока сигнал ошибки не ум-ень- шится до нуля. Наоборот, если скорость торможения транспортного средства больше заданного значения, то вырабатывается отрицательный сигнал ошибки Fg, который интегрируется интегратором 20 и вызывает постепенное уменьшение давления в тормозной системе до тех пор, пока не будет достигнуто требуемое значение скорости торможения,
Эта замкнутая цепь обратной связи устроена так, что при определенных условиях может не срабатывать, обычно это происходит при скоростях торможения ниже минимально установленного порогового значения, когда сигнал команды управления ниже установленного минимального значения, а также в других ситуациях, при которых в ходе торможения появляется проскальзывание и дальнейшее увеличение усилия в тормозной системе нежелательно с Кроме того, увеличение сигнала коррекции, поступающего с интегратора 20, прекращается, когда давление в тормозной системе достигает предельно допустимого значения.
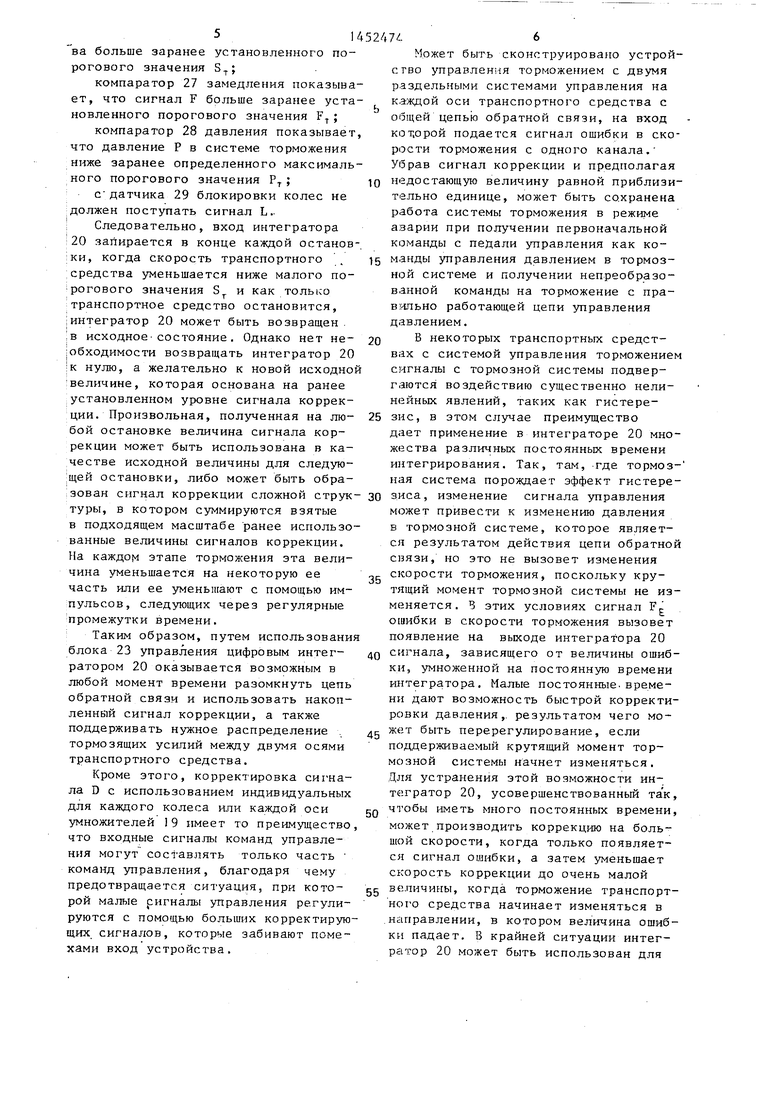
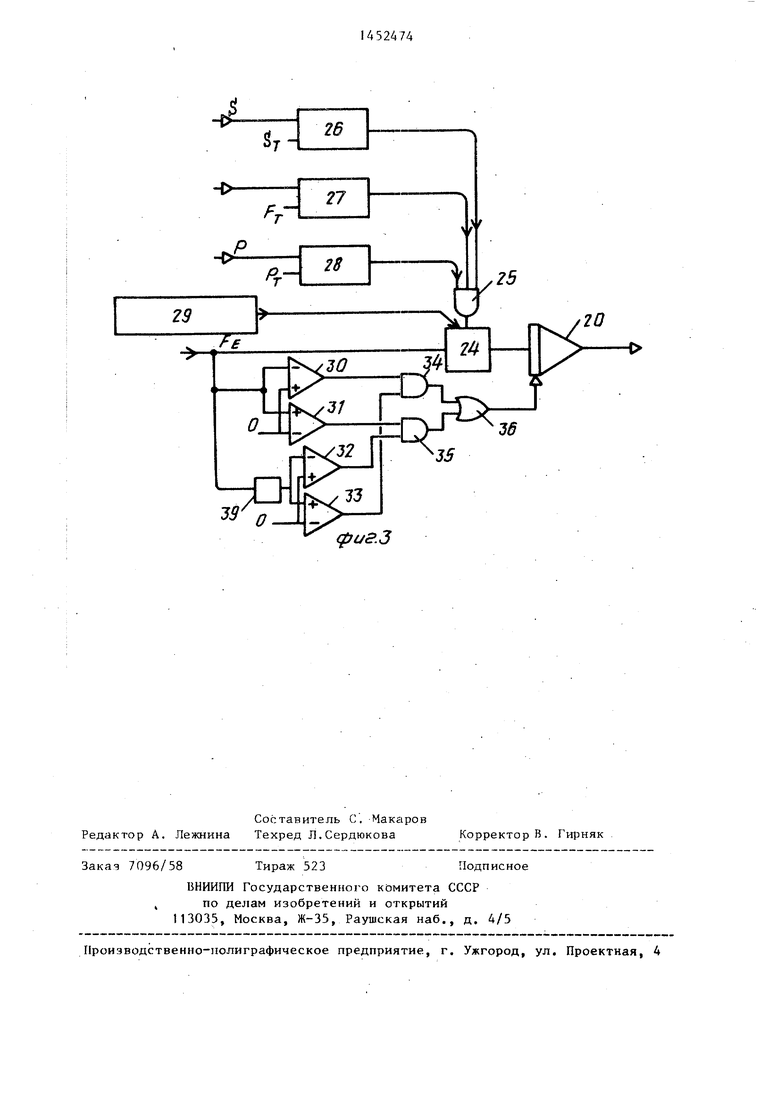
Система управления работой интегратора 20 показана на фиг.З.
Сигнал ошибки F поступает на вход интегратора 20 через управляемый ключ 24,который переходитв состояние Включено через схему И25 лриусловии,что компаратор 26 скорости показывает, что скорость S транспортного средства больше заранее установленного порогового значения
компаратор 27 замедления показывает, что сигнал F больше заранее установленного порогового значения
компаратор 28 давления показывает что давление Р в системе торможения ниже заранее определенного максимального порогового значения
С датчика 29 блокировки колес не должен поступать сигнал L.. ; Следовательно, вход интегратора 20 запирается в конце каждой останов :ки, когда скорость транспортного средства уменьшается ниже малого по- рогового значения S и как только транспортное средство остановится, :интегратор 20 может быть возвращен в исходное-состояние. Однако нет не- ;обходимости возвращать интегратор 20 К нулю, а желательно к новой исходно величине, которая основана на ранее установленном уровне сигнала коррекции. Произвольная, полученная на любой остановке величина сигнала коррекции может быть использована в качестве исходной величины для следую- ;щей остановки, либо может быть обра- ;зован сигнал коррекции сложной структуры, в котором суммируются взятые в подходящем масщтабе ранее использованные величины сигналов коррекции. На каждом этапе торможения эта величина уменьшается на некоторую ее часть или ее уменьшают с помощью импульсов, следующих через регулярные промежутки времени.
: Таким образом, путем использовани блока 23 управления цифровым интегратором 20 оказывается возможным в любой момент времени разомкнуть цепь обратной связи и использовать накопленный сигнал коррекции, а также поддерживать нужное распределение тормозящих усилий между двумя осями транспортного средства.
Кроме этого, корректировка сигнала D с использованием индивидуальных для каждого колеса или каждой оси умножителей 19 имеет то преимущество что входные сигналы команд управления могут сос1 авлять только часть команд управления, благодаря чему предотвращается ситуация, при которой малые ригналы управления регулируются с помощью больших корректирующих, сигналов, которые забивают помехами вход устройства.
Может быть сконструировано устройство управлен 1Я торможением с двумя раздельными системами управления на каждой оси транспортного средства с общей цепью обратной связи, на вход кот.орой подается сигнал ошибки в скорости торможения с одного канала. Убрав сигнал коррекции и предполагая
недостающую величину равной приблизительно единице, может быть сохранена работа системы торможения в режиме аварии при получении первоначальной команды с педали управления как команды управления давлением в тормозной системе и получении непреобразованной команды на торможение с пра- в ииьно работающей цепи управления давлением.
В некоторых транспортных средствах с системой управления торможением сигналы с тормозной системы подвергаются воздействию существенно нелинейных явлений, таких как гистерезис, в этом случае преимущество
дает применение в интеграторе 20 множества различных постоянных времени интегрирования. Так, там, -где тормоз- мая система порождает эффект гистерезиса, изменение сигнала управления может привести к изменению давления в тормозной системе, которое является результатом действия цепи обратной связи, но это не вызовет изменения
скорости торможения, поскольку крутящий момент тормозной системы не изменяется. В этих условиях сигнал F ошибки в скорости торможения вызовет появление на выходе интегратора 20
сигнала, зависящего от величины ошибки, умноженной на постоянную времени интегратора. Малые постоянные, времени дают возможность быстрой корректировки давления,, результатом чего может быть перерегулирование, если поддерживаемый крутящий момент тормозной системы начнет изменяться. Для устранения этой возможности интегратор 20, усовершенствованньш та к,
чтобы иметь много постоянных времени, может производить коррекцию на большой скорости, когда только появляется сигнал ошибки, а затем уменьшает скорость коррекции до очень малой
величины, когда торможение транспортного средства начинает изменяться в направлении, в котором величина ошибки падает. В крайней ситуации интегратор 20 может быть использован для
быстрой корректировки скорости торможения, когда команда подается,а выходной сигнал торможения не отслеживается, и действие этой коррекции прекращается, когда торможение начне чувствоваться.
Один из способов достижения такого изменяемого управления интегратором 20 показан в нижней части фиг .З, на которой сигнал ошибки F,- подается на инвертирующий вход перво г.о компаратора 30 и прямой вход второго компаратора 31. Два других входа компараторов 30 и 31 удерживают- ся на нуле. Скорость изменения сигнала ошибки торможения подается на инвертирующий и прямой входы соответственно третьего и четвертого компараторов 32 и 33, другие входы этих компараторов также являются нулевыми Выходной сигнал с компаратора 30 (соответствующий отрицательной величине ошибки) и выходной сигнал с компаратора 31 (соответствующий положител ной величине ошибки) подаются на входы схемы И 34. Выходной сигнал с компаратора 32 (соответствующий уменьшению величины Ошибки) и выходной г сигнал с компаратора 33 (соответст- вующий увеличению величины ошибки) подаются на входы схемы И 35. Выходные сигналы со схем И 34 и 35 управляют скоростью интегрирования интегратора 20 через вентиль 36 так, чтоб выбрать малую скорость, когда торможение транспортного средства начинает изменяться в направлении, вызывающем уменьшение сигнала ошибки.
В описанном устройстве управления электропневматической тормозной системой сигнал D - это команда на изменение давления в тормозной системе, но она воспринимается устройством как команда торможения, и давление регулируется, если по какой-либо причине скорость торможения не достигается или превышена. Причиной таких ошибок может быть нагрузка на транспортное средство, пиковые условия его работы или состояние самой тормозной системы. В идеальном случае необходима система контроля состояния тормозов, которая дает сигнал / тревоги всякий раз, когда в результа- те коррекции возникает усилие, большее заранее задан ной величины. Проверка воздействия на тормозную систему нагрузок и наклона дороги показала, что для большинства транспортных средств нагрузка является основным воздействующим фактором.
Таким образом, измерение нагрузок на оси, предусмотренные для правильного распределения тормозных усшшй, необходимы также и для вычисления корректирующих поправок и проводятся в каждом канале совместно нпи индивидуально методом прямых измерений нагрузок на ось. Как показано на фиг. 2, на входы распределительных блоков 21 подаются сигналы L и L действительных нагрузок на оси, которые даже при нулевой коррекции с интегратора 20 огиибок умножаются на нормировочный показатель в блоке 21 для получения главных множителей PMF которые включают поправку на нагруз- ,ку. При этих условиях интеграл сигнала ошибки торможения будет .величину, близкую к единице и будет в меньшей степени учитьюать коррекцию наклона дороги и составляющую, связанную с качеством тормозной системы. По прошествии дня нормальной эксплуатации транспортного средства величины поправок, вызванные наклоном дороги, будут исчезать, но поправки;. вызванные качеством тормозной систе-- мы, будут оставаться практически постоянными, благодаря чему остаточный сигнал на выходе интегратора будет показывать эффективность тормозной системы транспортного средства в целом. Другим способом обработки данных, получаемых суммированием выходных сигналов интегратора на всех концах остановок, является ограничение понижения выходных сигналов с интегратора параметром, установленньм для интегратора на каждой новой остановке в диапазоне от 0,5 до 2,0, который может также давать сигнал о качестве тормозной системы и сигнал тревоги, если тормоза неисправны при значении выходного сигнала, превышающем ,8.
Эта возможность показана на фиг.2 путем включения в схему детектора 37 Конец остановки и блока 38 Средний запас концов остановок, подключенных к выходу интегратора 20. Детектор 37 Конец остановки служит для распознавания конца каждой значительной остановки и сбора интегральных поправок с вькода интегратора для того, чтобы показать величину коррекции, вырабатьгоаемую в ходе остановки. Этот сигнал коррежции масштабируется и вводится в блок 38 для формирования длительной усреднен- кой корректирующей поправки за не- рколько десятков остановок, по ко- горой оказывается возможным судить качестве тормозной системы. Сигнал К подается на входы компараторов 32
И 33 через дифференциатор 39. j В устройствах, которые оборудова- датчиками нагрузок на оси, с целью Правильного распределения тормозных. |усилий между осями формируется сигнал |эб общей нагрузке на транспортное средство и имеется возможность смеще- Ния исходного сигнала на интегра- ггоре не только под воздействием коман ы увеличения давления в тормозной системе, но и за счет коррекции из-за
нагрузки, что приводит к уменьшению
i
рвеличин корректирующих поправок, сфор Иированных в конце каждой остановки. : Например, интегратор 20 может ра- |ботать от цифрового компьютера с па- ятью, в которую поступают дополнительные обработанные сигналы ошибок через заранее заданные интервалы вреД 5 24 7 А
II р и м е р. Предположим, что исходное состояние инте1 ратора - 128, Это исходное основное состояние ин гег ратора (SISF).
Интегральная коррекция-текущее показание интегратора („) хранимое в памяти исходное состояние интегратора (SISF).
Схема обработки данных показана
и
10
ниже.
Формирование интегральной поправки (Т-п - SISF)..
Умножение на п/100.
Прибавление к ранее хранимому в памяти исходному состоянию интегратора (SISF).
Запоминание этого значения как новой величины SISF.
Формирование SISF-128 и запоминание; этой величины как интегральной поправки. При усреднении на большом интервале времени эта величина показывает качество тормозной системы.
Формула изобретения 1. Устройство управления торможе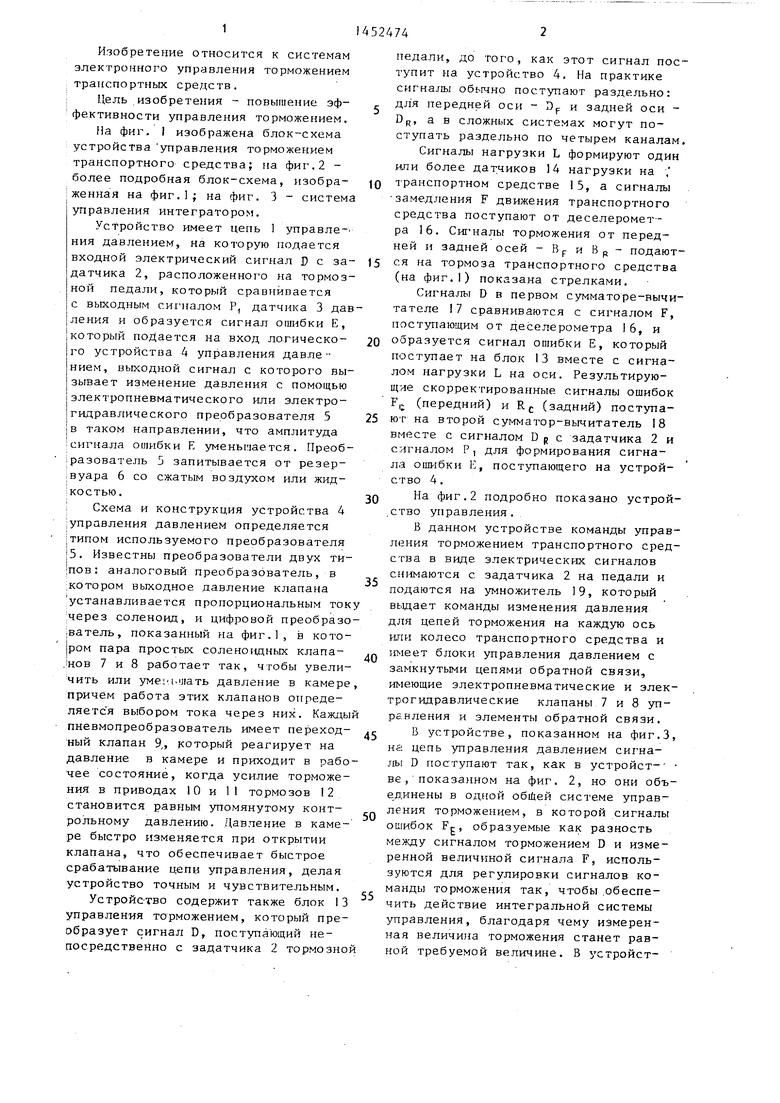
Изобретение относится к системам электронного управления торможением транспортных средств. Цель изобретения - повышение Э Ьфективности управления торможением. Устройство содержит множество каналов управления давлением в тормозной системе, работающих по команде задатчика 2 на тормозной педали с учетом условий TOpNio- жения, и замкнутую цепь обратной связи, на которую подается сигнал ошибки Fg в скорости торможения, определяемый сумматором 17. Сигнал, подаваемый с задатчика 2, корректируется в зависимости от интегральной функции ошибки вскорости торможения.Корректировки осуществляются с помощью умножителя 19,на один вход которого подается сигнал сзадатчика 2,а на другой- сигнал коррекции, вырабатываемый интегратором 20. Сигнал коррекции подается с интегратора 20 непрерывно, а цепь обратной связи отключается в любой заданный момент времени путем отключения сигнала ошибки Fe торможения от входа интегратора ф-лы, 3 ил. 20. 4 з.п. § СО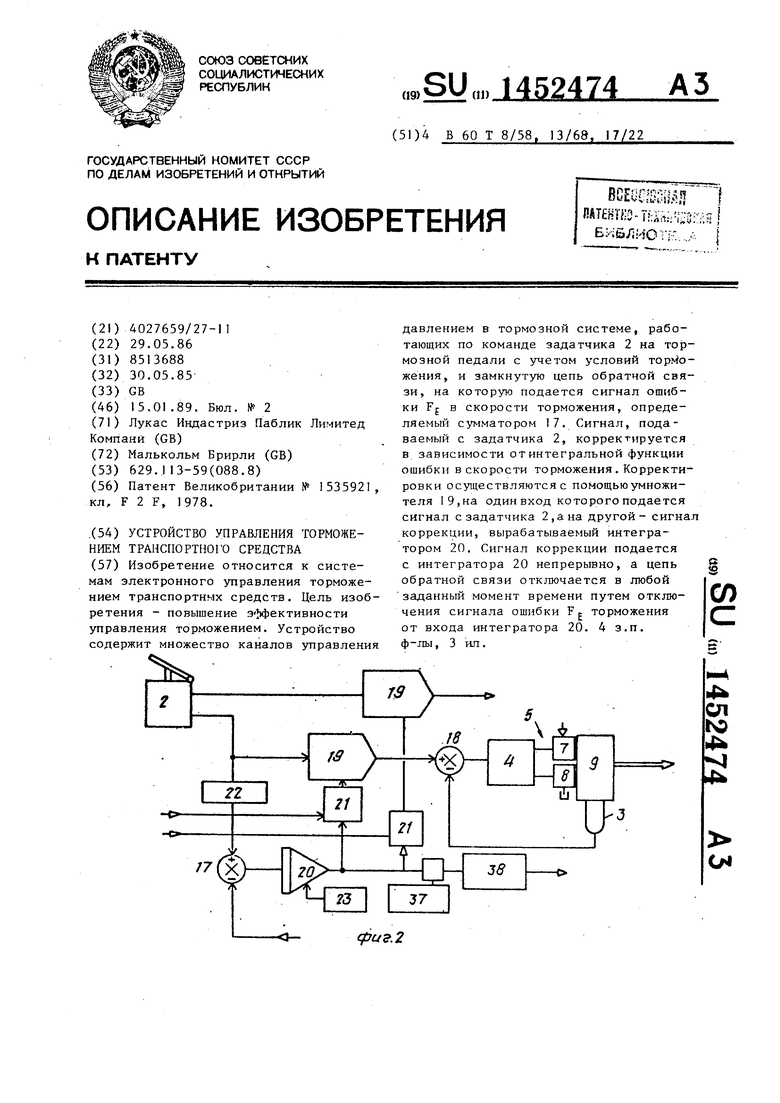
35
40
мени. В любой момент времени интегра- зо нием-транспортног:о средства, содержа- тор может быть установлен в исходное ;состояние на исходной начальной точ- ;ке, такой как единица или величина в выбранном масштабе, соответствующая единице. 1-1нтегральная коррекция, выполняемая в конце каждой остановки транспортного средства (или на участке с малой скоростью торможения, при которой изменения корректирующей поправки не происходит), может быть проведена путем вычисления разницы между окончательным показанием интегратора и хранящимися в памяти данными об исходном состоянии интегратора. В конце каждой остановки транспортного средства процесс интегрирования может быть возвращен к хранящейся в памяти исходной точке. Этой точкой может, быть установленное исходное значение или величина, образованная из исходного значения, плюс часть интегральной поправки, полученной в ходе процесса остановки. В последнем случае исходное состояние интегратора изменяется после каждой
остановки и благодаря этому процесс
унравления торможением оказывается
приспособленным к конкретному состоянию тормйзной системы. .
45
50
55
щее связанный с тормозной педалью электрический задатчик сигнала торможения, подключенный к прямому входу с: мматора, инверсный вход которого соединен с выходом д,5тчика давления в пневматическом приводе тормозов, а выход - с электрическим входом злектропневматического преобразователя, встроенного в пневматический привод тормозов, отличающее- с я тем, что, с целью повышения эффективности унравления торможением, оно снабжено умножителем, дополни- те.льным сумматором, интегратором и датчиком замедления транспортного средства, при этом эадатчик сигнала торможения подключен к одному входу У1 1ножителя и прямому входу ДОПОЛНИТЕЛЬНОГО сумматора, к инверсному входу которого подключен датчик замедления, выход дополнительного сумматора соединен с входом интегратора, связанного своим выходом с другим входом умножителя, подключенного выходом к прямому входу основного сумматора.
5
0
о нием-транспортног:о средства, содержа-
5
0
5
щее связанный с тормозной педалью электрический задатчик сигнала торможения, подключенный к прямому входу с: мматора, инверсный вход которого соединен с выходом д,5тчика давления в пневматическом приводе тормозов, а выход - с электрическим входом злектропневматического преобразователя, встроенного в пневматический привод тормозов, отличающее- с я тем, что, с целью повышения эффективности унравления торможением, оно снабжено умножителем, дополни- те.льным сумматором, интегратором и датчиком замедления транспортного средства, при этом эадатчик сигнала торможения подключен к одному входу У1 1ножителя и прямому входу ДОПОЛНИТЕЛЬНОГО сумматора, к инверсному входу которого подключен датчик замедления, выход дополнительного сумматора соединен с входом интегратора, связанного своим выходом с другим входом умножителя, подключенного выходом к прямому входу основного сумматора.
11
и входом интегратора встроен ключ с контуром автоматического управления.
CfJUS. 1
5247412
датчик нагрузки на ось транспортного средства.
Q вход первого и прямой вход второго компараторов подключены к выходу дополнительного сумматора, инверсный вход третьего и прямой вход четвертого компараторов подключены к вьрсо)5 ду дополнительного сумматора посредством диф4)еренциатора, а к другим входам компараторов подключены за- датчики сигнала нулевого уровня, входы одного элемента И соединены с выхо2Q дами первого и четвертого компараторов, входы другого элемента И соединены с выходами второго и третьего компараторов, а выходы элементов И подключены к входу вентиля.
Г6
ЙтЧ
26
Г t
27
Ч
Sff-l
ipus.3
и
r
,5
| Противофильтрационный экран | 1988 |
|
SU1535921A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
