Область техники
[0001] Настоящее изобретение относится к области предоставления вспомогательного управления для объезда твердого объекта (препятствия) на пути движения транспортного средства.
Уровень техники
[0002] Известен способ предоставления вспомогательного управления для объезда твердого объекта на пути движения транспортного средства посредством предупреждения водителя об опасности либо посредством активации тормозного устройства, когда на пути движения транспортного средства обнаружен твердый объект и при этом время, требуемое транспортному средству для достижения этого твердого объекта, или относительная дистанция между транспортным средством и этим твердым объектом равны или меньше порогового значения (см., например, Патентный документ 1).
Аналоги изобретения
Патентная документация
[0003] Патентный документ 1: Публикация японской патентной заявки №07-149193 (JP-07-149193 А)
Раскрытие изобретения
Проблема, решаемая данным изобретением
[0004] В вышеуказанном традиционном способе вспомогательное управление транспортным средством может быть осуществлено против намерения водителя. Поэтому существует возможность для усовершенствования способа определения того, необходимо или нет задействовать вспомогательное управление транспортным средством.
[0005] Настоящее изобретение создавалось с учетом вышеупомянутых обстоятельств. Задачей изобретения является предложение способа, который делает возможным предоставление вспомогательного управления транспортным средством, которое согласуется с ощущениями водителя в системе, помогающей избежать столкновения транспортного средства.
Средства решения проблемы
[0006] Чтобы решить описанную выше проблему, согласно настоящему изобретению, в системе, которая помогает избежать столкновения транспортного средства, устанавливают диапазон траекторий, по которым транспортное средство должно двигаться в будущем в рамках обычных действий по управлению, осуществляемых водителем, при этом вспомогательное управление транспортным средством предоставляется при условии, когда в этом установленном диапазоне отсутствует траектория, по которой можно объехать этот твердый объект.
[0007] Более конкретно, вспомогательная система управления транспортным средством по настоящему изобретению включает средство распознавания для идентификации твердых объектов, находящихся вокруг транспортного средства, средство сбора информации для определения текущей меры движения транспортного средства и вспомогательное средство управления транспортным средством для предоставления вспомогательного управления транспортным средством, помогающие избежать столкновения с твердым объектом, при условии, что в диапазоне траекторий отсутствует траектория объезда, которая была бы одной из траекторий, позволяющей объехать твердый объект (препятствие), идентифицированный средством распознавания на пути следования транспортного средства, по которому транспортному средству следует двигаться, если изменение в мере движения, произведенного в рамках обычных действий по управлению, осуществляемых водителем, возрастает или убывает по отношению к мере движения, определенной средством сбора информации.
[0008] Согласно настоящему изобретению диапазон (диапазон траекторий) маршрутов, по которым транспортное средство должно двигаться в будущем, определяют на основе изменения (которое дальше будет называться «нормальным изменением») меры движения транспортного средства, которая увеличивается или уменьшается в результате выполнения водителем обычных действий по управлению транспортным средством, и текущей меры движения транспортного средства. Этот диапазон траекторий включает маршрут, по которому следует транспортное средство, если предполагается, что водитель выполняет обычные действия по управлению транспортным средством (если предполагается, что мера движения транспортного средства изменяется в результате выполнения водителем обычных действий по управлению транспортным средством), в дополнение к маршруту, по которому следует транспортное средство, если предполагается, что действия водителя по управлению остаются неизменными (если предполагается, что мера движения транспортного средства остается неизменной). Следует уточнить, что упомянутые здесь «обычные действия по управлению транспортным средством» включает работу рулевого управления (руления) в дополнение к торможению.
[0009] В случае, когда в диапазоне траекторий есть траектория объезда, водитель выполняет обычные действия по управлению транспортным средством, в результате чего становится возможным избежать столкновения транспортного средства с твердым объектом. Таким образом, если как обычно вспомогательное управление транспортным средством активируется независимо от намерения водителя выполнять обычные действия по управлению транспортным средством в будущем, водитель может испытывать неудобства.
[0010] В противоположность этому, вспомогательная система управления транспортным средством по настоящему изобретению не осуществляет вспомогательное управление транспортным средством, если в диапазоне траекторий есть траектория объезда, а именно, если столкновение транспортного средства с твердым объектом может быть предотвращено в результате выполнения водителем обычных действий по управлению транспортным средством. Как следствие, становится возможным избежать ситуации, в которой вспомогательное управление транспортным средством осуществляется независимо от намерения водителя выполнить обычные действия по управлению транспортным средством.
[0011] Следует уточнить, что в случае, когда вспомогательное управление транспортным средством не осуществляется вспомогательными средствами управления транспортным средством, водитель может и не осуществлять управление транспортным средством в обычном режиме. Например, если водитель невнимателен, или водитель отвернулся, он может не выполнять обычных действий по управлению транспортным средством. Однако когда водитель не выполняет обычных действий по управлению транспортным средством, число вариантов для траектории объезда уменьшается по мере того, как транспортное средство приближается к твердому объекту. Тогда, как только траектория объезда перестает быть в диапазоне траекторий, активируется вспомогательное управление транспортным средством. Как следствие, даже в случае, когда водитель не выполняет обычных действий по управлению транспортным средством, столкновения транспортного средства с твердым объектом можно избежать.
[0012] Следует заметить, что вышеупомянутое нормальное изменение может быть получено заранее путем обработки данных с использованием экспериментальных или иных данных, или оно может быть определено на основе статистической информации о манере управления данного водителя. В этом случае нормальное изменение может быть фиксированной величиной или переменной величиной, которая увеличивается/уменьшается в зависимости от скорости движения транспортного средства. В случае, когда нормальное изменение увеличивается/уменьшается в зависимости от скорости транспортного средства, нормальное изменение может быть установлено большим, когда скорость движения транспортного средства низкая, по сравнению с тем, когда скорость движения транспортного средства высокая. Это делается потому, что диапазон действий водителя, которые могут обычно выполняться водителем, с большей вероятностью может быть расширен, и, таким образом, нормальное изменение также является большим, когда скорость движения транспортного средства низкая, по сравнению с тем, когда скорость движения транспортного средства высокая.
[0013] В качестве «меры движения» транспортного средства в настоящем изобретении возможно использовать угловую скорость рыскания, действующую на транспортное средство, ускорение (продольную составляющую ускорения), действующее в направлении продольной оси транспортного средства, ускорение (поперечную составляющую ускорения), действующее в направлении поперечной оси транспортного средства, перегрузку G (продольную перегрузку G), действующую в направлении продольной оси транспортного средства, перегрузку G (поперечную перегрузку G), действующую в направлении поперечной оси транспортного средства, боковую реактивную силу и т.п.
[0014] Следует отметить, что желательно, чтобы параметр, используемый в качестве «меры движения» транспортного средства в настоящем изобретении, был параметром, который делает вышеупомянутый диапазон траекторий уже, когда скорость движения транспортного средства высокая, по сравнению с тем, когда скорость движения транспортного средства низкая, как это имеет место в случае с поперечной составляющей ускорения и поперечной перегрузкой G. Если этот параметр используется в качестве меры движения, то диапазон траекторий уже, когда скорость движения транспортного средства высокая, по сравнению с тем, когда скорость движения транспортного средства низкая. Как следствие, временной интервал, по истечении которого траектория объезда перестает находиться в диапазоне траекторий (иными словами, промежуток времени, через который будет активировано вспомогательное управление транспортным средством), будет короче, когда скорость движения транспортного средства высокая, по сравнению с тем, когда скорость движения транспортного средства низкая. Как следствие, столкновения транспортного средства с твердым объектом можно избежать даже при движении транспортного средства с высокой скоростью.
[0015] Кроме того, во вспомогательной системе управления транспортным средством по настоящему изобретению, если в диапазоне траекторий отсутствует траектория объезда твердого объекта, то средство вспомогательного управления может выполнить вспомогательное управление транспортным средством незамедлительно, или как только длина самого протяженного из маршрутов, включенных в диапазон траекторий, станет равной пороговому значению или ниже порогового значения.
[0016] В случае, когда в диапазоне траекторий отсутствует траектория объезда, если вспомогательное управление активируется незамедлительно, велика вероятность того, что столкновения можно будет избежать. Однако некоторые водители в определенных случаях начинают обычные действия по управлению транспортным средством относительно поздно. Поэтому, если вспомогательное управление активируется сразу же после того, когда из диапазона траекторий исчезает траектория объезда, водитель может испытывать неудобства. И напротив, если вспомогательное управление активируется, как только длина самого протяженного из маршрутов, включенных в диапазон траекторий, станет равной пороговому значению или ниже порогового значения, становится возможным активировать вспомогательное управление, не вызывая у водителя чувства неудобства, как описано выше. Следует уточнить, что упомянутое здесь «пороговое значение» представляет собой величину, получаемую путем прибавления запаса/допуска к длине самого короткого маршрута, который позволяет избежать столкновения транспортного средства с твердым объектом, посредством активации вспомогательного управления транспортным средством.
[0017] Вспомогательное управление по настоящему изобретению представляет собой приведение в действие, по крайней мере, одного из следующего: предупреждающий звуковой сигнал, загорание предупреждающей лампы и сообщение, передаваемое на динамик или на видеомонитор, задействование автоматического выполнения рулевого управления (руления) или выполнения торможения и т.п. Следует уточнить, что вышеуказанное пороговое значение может быть установлено ниже в случае, когда вспомогательное управление активируется путем комбинации выполнения рулевого управления и выполнения торможения, чем в случае, когда вспомогательное управление осуществляется путем выполнения только рулевого управления, либо только путем выполнения торможения. Таким образом, столкновения транспортного средства с твердым объектом можно избежать, устанавливая время активации вспомогательного управления настолько поздним, насколько это возможно.
Технический результат
[0018] Настоящее изобретение делает возможным предоставление вспомогательного управления, согласованного с ощущениями водителя, в системе, помогающей избежать столкновения транспортного средства.
Краткое описание чертежей
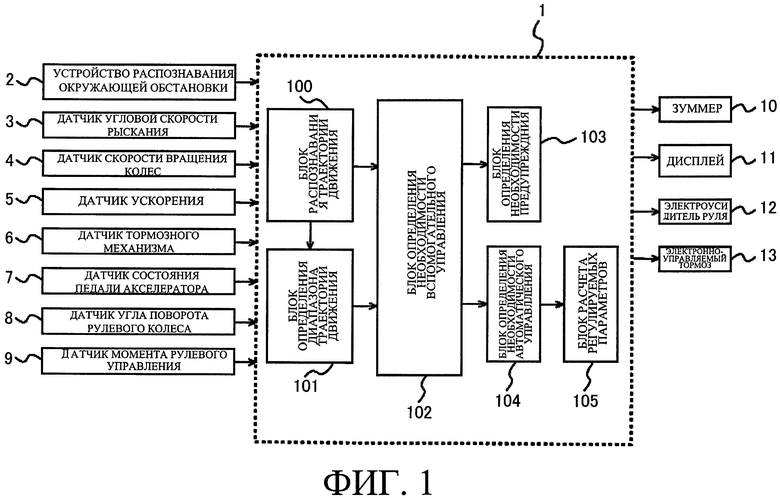
[0019] [ФИГ. 1] ФИГ. 1 отображает конфигурацию системы вспомогательного управления транспортным средством по настоящему изобретению.
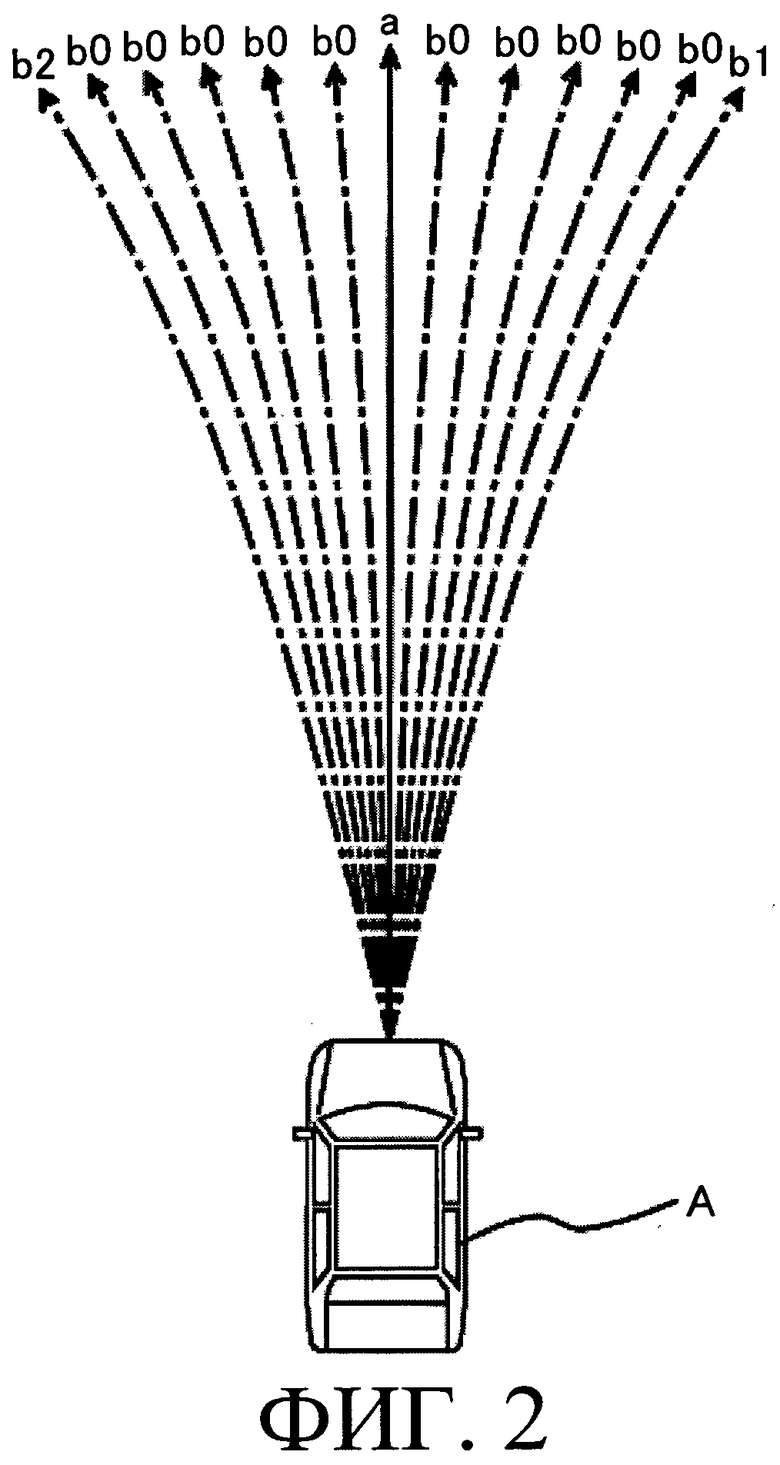
[ФИГ. 2] ФИГ. 2 представляет собой изображение способа определения диапазона траекторий транспортного средства.
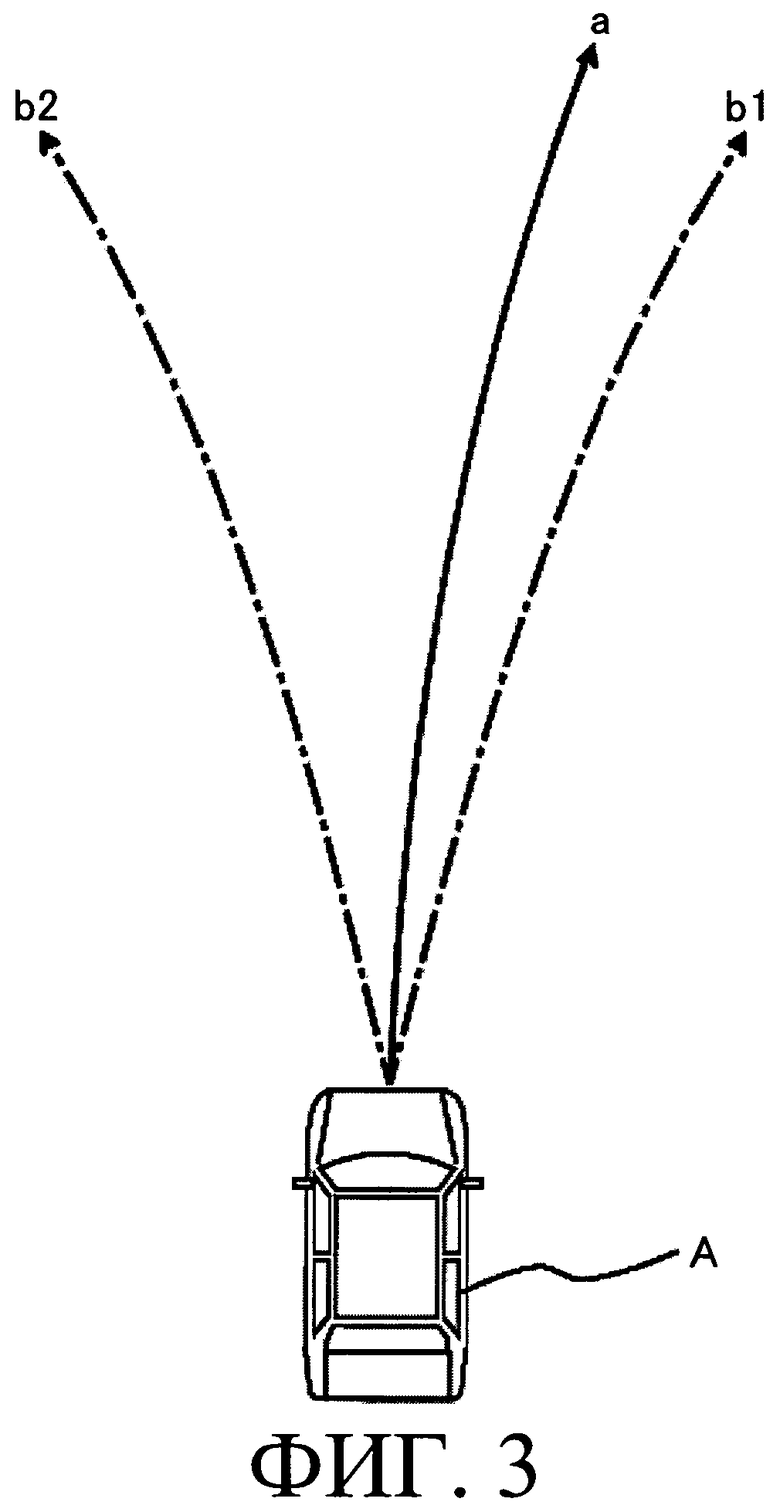
[ФИГ. 3] ФИГ. 3 представляет собой изображение другого способа определения диапазона траекторий движения транспортного средства.
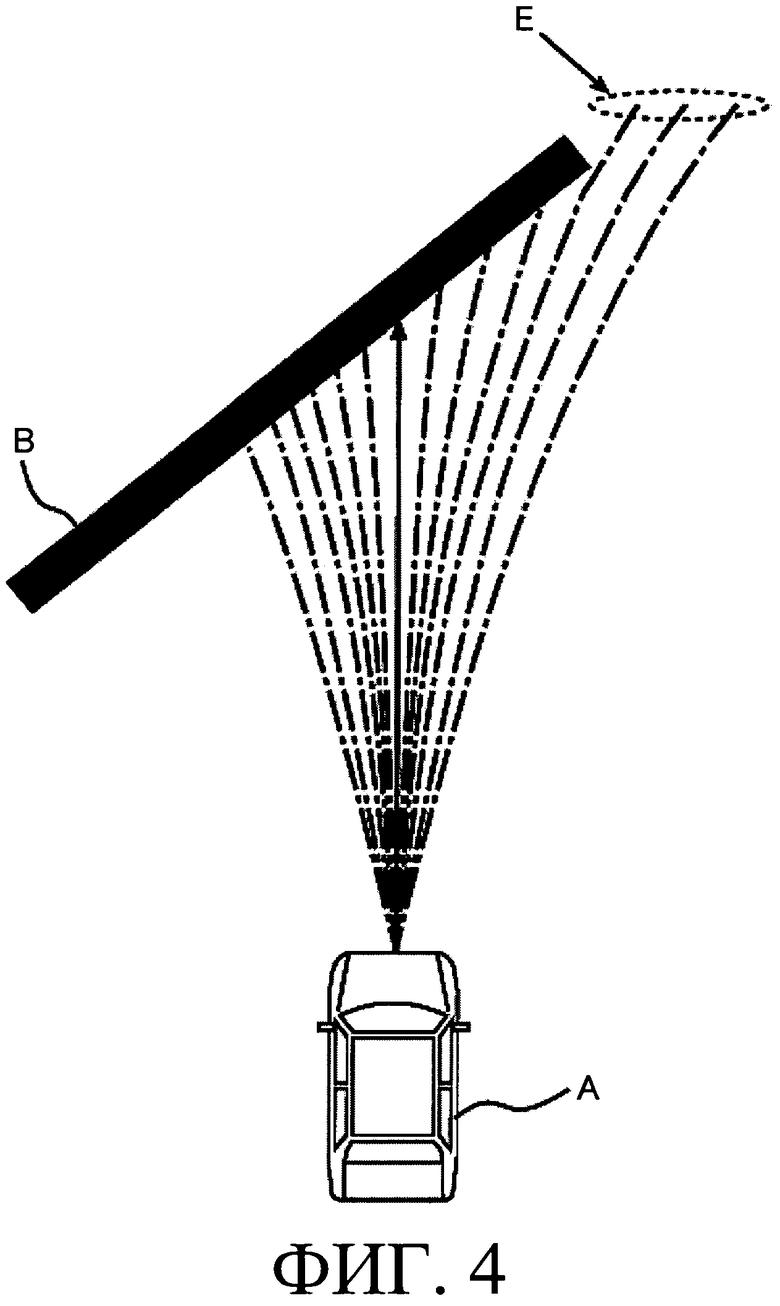
[ФИГ. 4] ФИГ. 4 отображает пример, в котором в диапазоне траекторий есть траектория объезда.
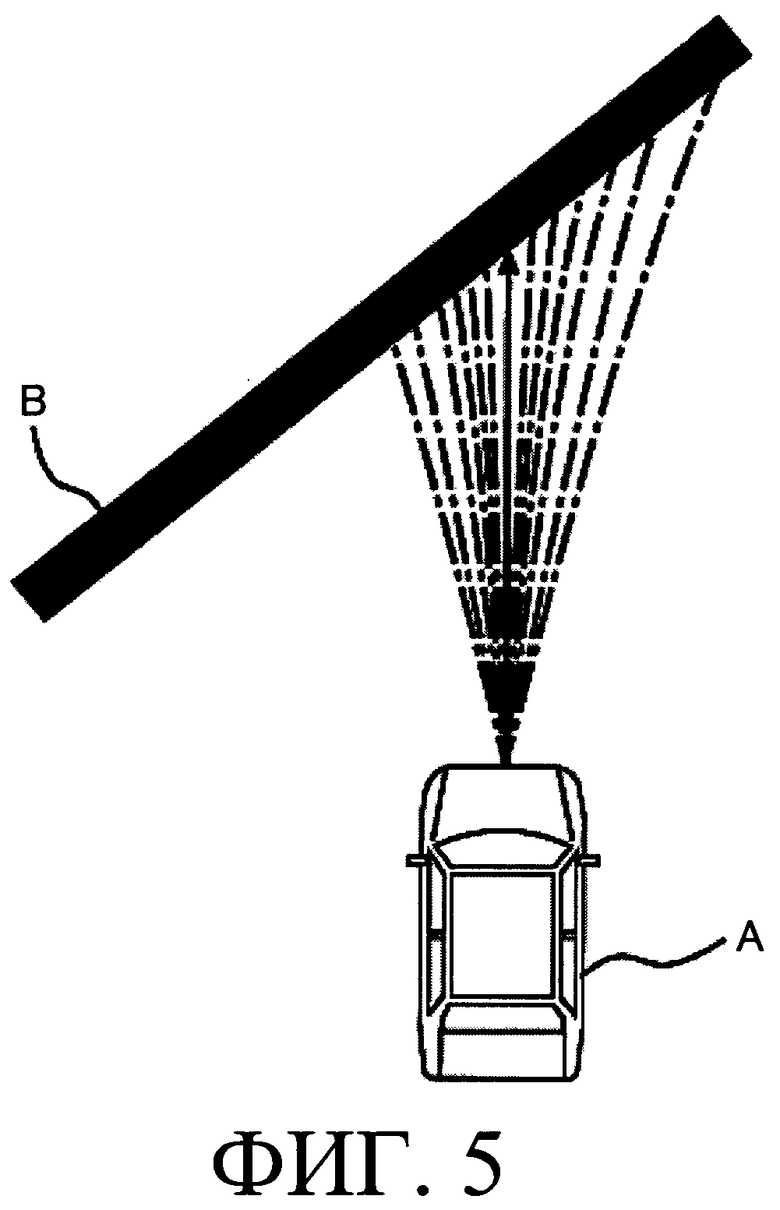
[ФИГ. 5] ФИГ 5 отображает пример, в котором в диапазоне траекторий отсутствует траектория объезда.
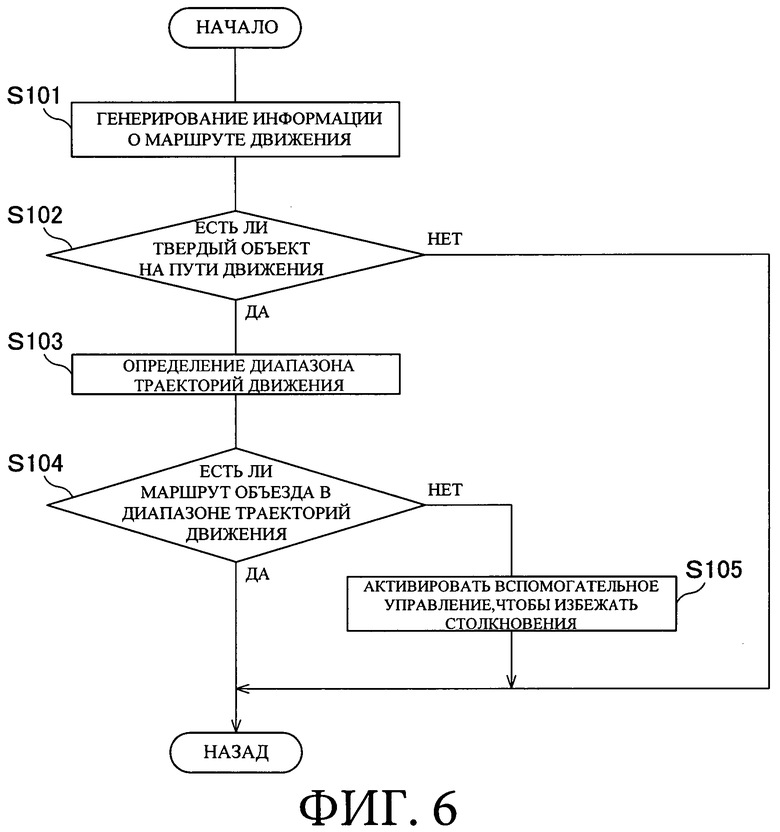
[ФИГ. 6] ФИГ. 6 представляет собой блок-схему, на которой представлена последовательность действий предоставления вспомогательного управления.
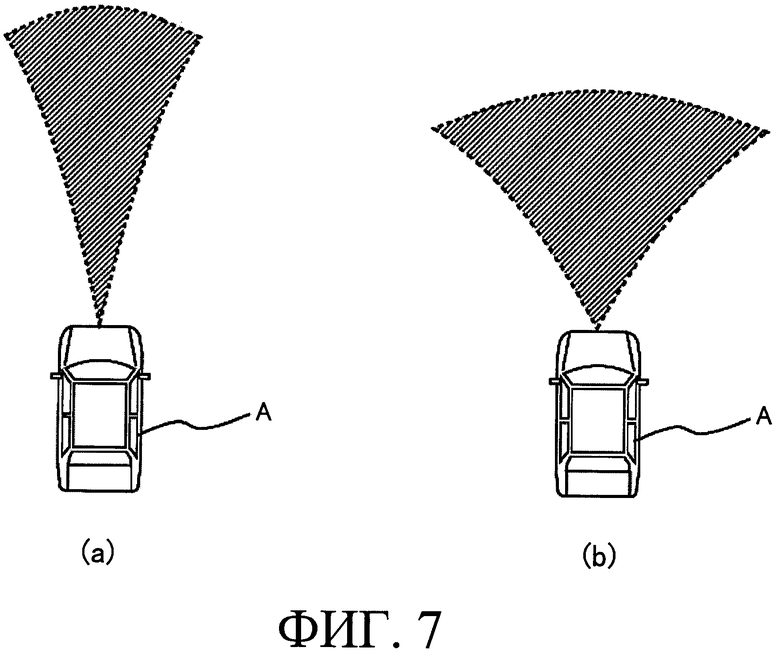
[ФИГ. 7] ФИГ. 7 отображает взаимозависимость между скоростью транспортного средства и диапазоном траекторий.
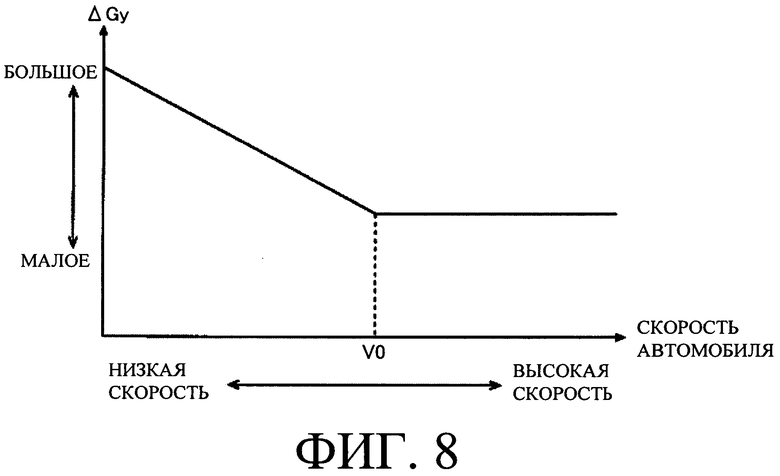
[ФИГ. 8] ФИГ. 8 отображает зависимость обычного изменения от скорости транспортного средства.
Осуществление изобретения
[0020] Конкретные варианты осуществления изобретения будут описаны далее со ссылкой на чертежи. В данном случае будет описан пример, в котором изобретение применяется в системе, которая принимает решения относительно пути движения и препятствия, и предоставляет вспомогательное управление для предотвращения отклонения от пути движения, относительно которого принято решение, или столкновения с препятствием. Следует уточнить, что упомянутый здесь термин «вспомогательный» обозначает процедуру, которая выполняется в течение промежутка времени, когда транспортное средство может избежать столкновения с твердым объектом как препятствием. Эта процедура выполняется раньше, чем процедура смягчения отрицательных последствий столкновения, которая выполняется, если столкновение транспортного средства с препятствием неизбежно. Кроме того, конфигурация, которая будет описана в каждом из последующих вариантов осуществления настоящего изобретения, показывает один из способов осуществления изобретения, но это не ограничивает конфигурации изобретения.
[0021] (Первый вариант осуществления изобретения)
Первый вариант осуществления изобретения будет описан со ссылкой на ФИГ. с 1 по 6. На ФИГ. 1 представлена функциональная блок-схема, отображающая конфигурацию вспомогательной системы управления транспортным средством, в которой использовано настоящее изобретение. Как показано на ФИГ. 1, транспортное средство оборудовано электронным блоком 1 управления (ЭБУ) для вспомогательного управления.
[0022] Блок 1 ЭБУ представляет собой электронный блок управления, который включает ЦПУ, ПЗУ, ОЗУ, резервное ОЗУ, интерфейс ввода-вывода и т.п. Различные датчики, такие, как устройство 2 распознавания окружающей обстановки, датчик 3 угловой скорости рыскания, датчики 4 скорости вращения колес, датчик 5 ускорения, датчик 6 тормозного механизма, датчик 7 положения педали акселератора, датчик 8 угла поворота рулевого колеса, датчик 9 момента рулевого управления и подобные устройства электрически соединены с блоком 1 ЭБУ. Выходные сигналы этих датчиков поступают в блок 1 ЭБУ.
[0023] Устройство 2 распознавания окружающей обстановки включает по меньшей мере одно из устройств: лазерное устройство обнаружения и измерения дальности (LIDAR), лазерный дальномер (LRF), радар миллиметрового диапазона, стереоскопическая камера и т.п., и регистрирует информацию о положении транспортного средства по отношению к твердому объекту, находящемуся рядом с транспортным средством (например, относительную дистанцию и относительный угол).
[0024] Датчик 3 угловой скорости рыскания устанавливается, например, на кузов транспортного средства, и выдает электрический сигнал в зависимости от угловой скорости рыскания, действующей на транспортное средство. Датчики 4 скорости вращения колес представляют собой датчики, которые устанавливаются на колесах транспортного средства и выдают электрические сигналы скорости перемещения (скорости движения) транспортного средства, соответственно. Датчик 5 ускорения выдает электрический сигнал в зависимости от ускорения (продольной составляющей ускорения), действующего в направлении продольной оси транспортного средства, и ускорения (поперечной составляющей ускорения), действующего в направлении поперечной оси транспортного средства.
[0025] Датчик 6 тормозного механизма устанавливается, например, на педали тормоза внутри транспортного средства и выдает электрический сигнал в зависимости от рабочего вращающего момента (силы нажатия) педали тормоза. Датчик 7 положения педали акселератора устанавливается, например, на педали акселератора внутри транспортного средства и выдает электрический сигнал в зависимости от силы нажатия на педаль акселератора (рабочего вращающего момента). Датчик 8 угла поворота рулевого колеса устанавливается, например, на рулевом штоке, который соединен с рулевым колесом, внутри транспортного средства и выдает электрический сигнал в зависимости от угла поворота (угла поворота рулевого колеса) относительно нейтрального положения рулевого колеса. Датчик 9 момента рулевого управления прикреплен к рулевому штоку и выдает электрический сигнал в зависимости от вращающего момента (момента рулевого управления), который является входным для рулевого колеса.
[0026] Кроме того, различные приборы, такие, как зуммер 10, дисплей 11, электроусилитель руля (EPS) 12, электронно-управляемый тормоз (ЕСВ) 13 и т.п. соединены с блоком 1 ЭБУ. Блок 1 ЭБУ электрически управляет этими приборами.
[0027] Зуммер 10 представляет собой устройство, которое устанавливается, например, внутри транспортного средства и выдает предупреждающий звуковой сигнал или т.п. Дисплей 11 представляет собой устройство, которое устанавливается, например, внутри транспортного средства и отображает различные сообщения и предупреждающий световой сигнал. Электроусилитель руля (EPS) 12 представляет собой устройство, которое усиливает момент рулевого управления рулевого колеса при использовании вращающего момента, генерируемого электрическим двигателем. Электронно-управляемый тормоз (ЕСВ) 13 представляет собой устройство, которое электрически регулирует давление гидравлического масла (гидравлическое давление тормозов) в фрикционном тормозе, которым оснащено каждое колесо.
[0028] Для управления различными устройствами при помощи выходных сигналов вышеупомянутых различных датчиков, блок 1 ЭБУ имеет следующие функции. А именно, блок 1 ЭБУ оборудован блоком 100 распознавания траектории движения, блоком 101 определения диапазона траекторий движения, блоком 102 определения необходимости вспомогательного управления, блоком 103 определения необходимости предупреждения, блоком 104 определения необходимости автоматического управления и блоком 105 расчета регулируемых параметров.
[0029] Блок 100 распознавания траектории движения генерирует информацию о траектории (траектории движения), по которой транспортное средство должно следовать на основе выходной информации устройства 2 распознавания окружающей обстановки. Например, блок 100 распознавания траектории движения генерирует информацию о координатах местонахождения, указывающих твердые объекты, которые могут быть препятствиями для транспортного средства, и о границах полосы движения (например, о дорожной разметке, такой, как белые линии, желтые линии и т.п., которые обозначают границы полос движения; о краях тротуара, которые простираются за пределами полос движения, дорожных ограждениях, канавах, стенах, твердых объектах таких, как столбы и т.д. и т.п.) и о позиции транспортного средства в отношении к этим твердым объектам и границам полосы движения (расстояние, угловая скорость рыскания и т.п.) в координатной системе с началом координат в точке текущего местоположения транспортного средства. Следует уточнить, что блок 100 распознавания траектории движения является одним из возможных средств распознавания по настоящему изобретению.
[0030] Блок 101 определения диапазона траекторий движения устанавливает маршрут, который вычисляется, чтобы по нему двигалось транспортное средство, начиная с текущего момента, в системе координат, сгенерированной блоком 100 распознавания траектории движения. В этом случае блок 101 определения диапазона траекторий движения рассчитывает диапазон (диапазон траекторий) маршрутов, по которым транспортное средство должно двигаться в будущем в рамках выполнения водителем обычных действий по управлению транспортным средством.
[0031] В частности, как показано на ФИГ. 2, блок 101 определения диапазона траекторий движения получает текущую перегрузку от поперечного ускорения Gy0 транспортного средства А из выходного сигнала датчика 5 ускорения, и устанавливает маршрут, который вычисляется, чтобы по нему двигалось транспортное средство А в случае, если транспортное средство А продолжит движение, сохраняя текущую перегрузку от поперечного ускорения Gy0. Затем блок 101 определения диапазона траекторий движения устанавливает маршрут b1 который вычисляется, чтобы по нему двигалось транспортное средство А в случае, если нормальное изменение ΔGy будет добавлено к текущей перегрузке от поперечного ускорения Gy0 транспортного средства А, и устанавливает маршрут b2, который вычисляется, чтобы по нему двигалось транспортное средство А, если нормальное изменение ΔGy будет вычтено из текущей перегрузки от поперечного ускорения Gy0 транспортного средства А. В этом случае блок 101 определения диапазона траекторий движения может рассчитать радиус поворота R транспортного средства А на основе значения, полученного путем прибавления нормального изменения ΔGy к текущей перегрузке от поперечного ускорения Gy0, или на основе значения, полученного путем вычитания нормального изменения ΔGy из текущей перегрузки от поперечного ускорения Gy0, и установить маршруты b1 и b2 на основе рассчитанного радиуса поворота R. Следует уточнить, что радиус поворота R может быть вычислен путем деления скорости транспортного средства V на величину угловой скорости рыскания (R=V/γ), а угловая скорость рыскания γ может быть вычислена путем деления перегрузки от поперечного ускорения Gy на скорость транспортного средства V (γ=Gy/V). Далее, блок 101 определения диапазона траекторий движения устанавливает траекторию b0 в этом диапазоне (диапазоне траекторий) от вышеупомянутого маршрута b1 до вышеупомянутого маршрута b2 в случае, когда угол поворота рулевого колеса или поперечная составляющая ускорения постепенно изменяются на определенную величину.
[0032] Следует заметить, что нормальное изменение ΔGy является величиной, равной максимальной величине изменения поперечной составляющей ускорения в рамках выполнения водителем обычных действий по управлению транспортным средством, и заранее определяется экспериментальным путем. Следует уточнить, что если транспортное средство А уже находится в состоянии поворота в настоящий момент (|Gy0|>0), модуль (|Gy0±AGy|) величины, которую получили путем прибавления нормального изменения ΔGy к текущей перегрузке от поперечного ускорения Gy0 или путем вычитания нормального изменения ΔGy из текущей перегрузки от поперечного ускорения Gy0, может стать больше максимальной величины перегрузки от поперечного ускорения (например, от 0,2 G до 0,3 G), которая сгенерирована при выполнении водителем обычных действий по управлению транспортным средством. Как следствие, величина нормального изменения ΔGy может быть ограничена таким образом, чтобы модуль значения, которое было получено путем прибавления нормального изменения ΔGy к текущей перегрузке от поперечного ускорения Gy0 или путем вычитания нормального изменения ΔGy из текущей перегрузки от поперечного ускорения Gy0, был бы равным максимальной поперечной составляющей ускорения или меньше ее.
[0033] Кроме того, при установлении диапазона траекторий движения блок 101 определения диапазона траекторий может установить в качестве маршрутов b1 и b2 маршруты, которые вычисляются, чтобы по ним двигалось транспортное средство А в случае, когда транспортное средство двигается с максимальной поперечной составляющей ускорения. Например, как показано на ФИГ. 3, блок 101 определения диапазона траекторий движения может установить в качестве маршрута b1 маршрут, который вычисляется, чтобы по нему двигалось транспортное средство А в случае, когда транспортное средство выполняет правый поворот с максимальной поперечной составляющей ускорения, и установить в качестве маршрута b2 маршрут, который вычисляется, чтобы по нему двигалось транспортное средство А в случае, когда транспортное средство выполняет левый поворот с максимальной поперечной составляющей ускорения.
[0034] Затем блок 102 определения необходимости вспомогательного управления принимает решение о необходимости активации вспомогательного управления на основании информации, сгенерированной блоком 100 распознавания траектории движения, и диапазона траекторий движения, определенного блоком 101 определения диапазона траекторий движения. В частности, как показано на ФИГ. 4, если в диапазоне траекторий движения существует маршрут Е, который позволяет объехать твердый объект В, блок 102 определения необходимости вспомогательного управления запрещает выполнение вспомогательного управления. С другой стороны, как показано на ФИГ. 5, если маршрут объезда перестает находиться в диапазоне траекторий движения, блок 102 определения необходимости вспомогательного управления разрешает выполнение вспомогательного управления.
[0035] Если блок 102 определения необходимости вспомогательного управления разрешает выполнение вспомогательного управления, блок 103 определения необходимости предупреждения предупреждает водителя сигналом зуммера 10, отображением предупреждающего сообщения или загоранием предупреждающего светового сигнала на дисплее 11 и т.п. Например, если блок 102 определения необходимости вспомогательного управления разрешает выполнение вспомогательного управления (если в диапазоне траекторий движения отсутствует маршрут объезда), блок 103 определения необходимости предупреждения может незамедлительно подать сигнал зуммером 10 или вывести предупредительное сообщение на дисплей 11 или включить предупреждающий световой сигнал.
[0036] Кроме того, как только расстояние между транспортным средством и твердым объектом становится равным заранее заданному расстоянию или короче его в отношении маршрута с наибольшим расстоянием между транспортным средством и твердым объектом среди маршрутов, включенных в диапазон траекторий движения, блок 103 определения необходимости предупреждения может подать сигнал зуммером 10 или вывести предупредительное сообщение на дисплей 11, или включить предупреждающий световой сигнал. Кроме того, блок 103 определения необходимости предупреждения может рассчитать время, требуемое транспортному средству, чтобы достичь твердый объект В в отношении маршрута с наибольшим расстоянием между транспортным средством и твердым объектом и подать сигнал зуммером 10 или вывести предупредительное сообщение на дисплей 11, или включить предупреждающий световой сигнал, как только рассчитанное значение окажется равным заранее заданному временному интервалу или меньше его. Таким образом, если временной интервал, при котором срабатывает зуммер 10, или временной интервал, при котором выводится предупредительное сообщение или включается предупреждающий световой сигнал на дисплее 11, определен в отношении маршрута с наибольшим расстоянием между транспортным средством и твердым объектом, эти временные интервалы могут быть заданы как самые поздние из возможных значений. Как следствие, вспомогательное управление может быть осуществлено без причинения беспокойства водителю.
[0037] Здесь следует заметить, что вышеуказанное заданное расстояние или вышеуказанный заданный временной интервал могут изменяться в соответствии с выходным сигналом датчика 3 угловой скорости рыскания или выходными сигналами датчиков 6 скорости вращения колес. Например, заданное расстояние или заданный временной интервал могут быть установлены длиннее, когда скорость транспортного средства высокая, по сравнению с тем, когда скорость транспортного средства низкая. Кроме того, заданное расстояние или заданный временной интервал могут быть длиннее, когда угловая скорость рыскания высокая, по сравнению с тем, когда угловая скорость рыскания транспортного средства низкая.
[0038] Следует уточнить, что также можно установить длины соответствующих маршрутов, включенных в диапазон траекторий движения транспортного средства, на заданную дальность и подавать сигнал зуммером 10 или выводить предупредительное сообщение на дисплей 11, или включать предупреждающий световой сигнал, как только все возможные маршруты в диапазоне траекторий движения пересекутся с твердым объектом. Кроме того, способ предупреждения водителя не ограничивается способами подачи звукового сигнала при помощи зуммера 10 или выведения предупредительного сообщения на дисплей, или включения светового сигнала. Например, может быть применен способ изменения момента затяжки ремня безопасности рывком.
[0039] Если блок 102 определения необходимости вспомогательного управления разрешает выполнение вспомогательного управления, блок 104 определения необходимости автоматического управления определяет временные интервалы задействования электроусилителя руля (EPS) 12 и электронно-управляемого тормоза (ЕСВ) 13, чтобы предотвратить столкновение транспортного средства с твердым объектом.
[0040] В частности, блок 104 определения необходимости автоматического управления может приводить в действие электроусилитель руля (EPS) 12 и электронно-управляемый тормоз (ЕСВ) 13, как только расстояние между транспортным средством и твердым объектом станет равным заданному расстоянию или короче его в отношении маршрута с наибольшим расстоянием между транспортным средством и твердым объектом среди маршрутов, включенных в диапазон траекторий движения. Кроме того, блок 104 определения необходимости автоматического управления может рассчитать время, требуемое транспортному средству, чтобы достичь твердый объект, в отношении маршрута с наибольшим расстоянием между транспортным средством и твердым объектом среди маршрутов, включенных в диапазон траекторий движения, и привести в действие электроусилитель руля (EPS) 12 и электронно-управляемый тормоз (ЕСВ) 13, как только рассчитанное значение станет равным заданному временному интервалу или меньше его.
[0041] Таким образом, если временные интервалы, при которых приводятся в действие электроусилитель руля (EPS) 12 и электронно-управляемый тормоз (ЕСВ) 13 определены в отношении маршрута с максимальным расстоянием между транспортным средством и твердым объектом, эти временные интервалы могут быть заданы как самые поздние из возможных значений. Как следствие, вспомогательное управление может быть осуществлено без причинения беспокойства водителю.
[0042] Следует уточнить, что также можно установить длины соответствующих маршрутов, включенных в диапазон траекторий движения транспортного средства, на заданную дальность и приводить в действие электроусилитель руля (EPS) 12 и электронно-управляемый тормоз (ЕСВ) 13, как только все возможные маршруты в диапазоне траекторий движения пересекутся с твердым объектом.
[0043] Заданное расстояние и заданный временной интервал, которые используются блоком 104 определения необходимости автоматического управления, могут изменяться в зависимости от скорости транспортного средства и угловой скорости рыскания, как в случае с заданным расстоянием и заданным временным интервалом, которые используются блоком 103 определения необходимости предупреждения, однако их значения устанавливают равными или меньшими, чем значения заданного расстояния и заданного временного интервала, которые используются блоком 103 определения необходимости предупреждения, соответственно.
[0044] Когда блок 104 определения необходимости автоматического управления определяет временные интервалы, при которых приводятся в действие, блок 105 расчета регулируемых параметров рассчитывает регулируемые параметры электроусилителя руля (EPS) 12 и электронно-управляемого тормоза (ЕСВ) 13 и приводится в действие электроусилитель руля (EPS) 12 и электронно-управляемый тормоз (ЕСВ) 13 в соответствии с вычисленными регулируемыми параметрами и временными интервалами, на основании которых решения принимаются блоком 104 определения необходимости автоматического управления.
[0045] Например, блок 105 расчета регулируемых параметров вычисляет целевую угловую скорость рыскания, чтобы избежать столкновения транспортного средства с твердым объектом. Затем блок 105 расчета регулируемых параметров определяет регулируемый параметр (момент рулевого управления) электроусилителя руля (EPS) 12 и регулируемый параметр (гидравлическое давление тормоза) электронно-управляемого тормоза (ЕСВ) 13 так, чтобы реальная угловая скорость рыскания транспортного средства (выходной сигнал датчика 3 угловой скорости рыскания) совпала с целевой угловой скоростью рыскания. В этом случае соотношение между целевой угловой скоростью рыскания и моментом рулевого управления и соотношение между целевой угловой скоростью рыскания и гидравлическим давлением тормоза могут быть установлены заранее.
[0046] Следует уточнить, что способ торможения транспортного средства не ограничен способом управления фрикционным тормозом посредством электронно-управляемого тормоза (ЕСВ) 13. Также могут применяться способ преобразования (регенерации) кинетической энергии транспортного средства в электрическую энергию или способ изменения кинематического передаточного числа, чтобы увеличить интенсивность торможения двигателем. Кроме того, способ изменения угловой скорости рыскания транспортного средства не ограничивается способом изменения угла поворота при помощи электроусилителя руля (EPS) 12. Также можно применить различное гидравлическое давление тормоза на правое и левое колеса транспортного средства соответственно.
[0047] Здесь следует заметить, что вышеуказанный блок 101 определения диапазона траекторий движения, вышеуказанный блок 102 определения необходимости вспомогательного управления, вышеуказанный блок 103 определения необходимости предупреждения, вышеуказанный блок 104 определения необходимости автоматического управления и вышеуказанный блок 105 расчета регулируемых параметров являются вспомогательными средствами управления по настоящему изобретению.
[0048] Последовательность действий предоставления вспомогательного управления транспортным средством в данном варианте осуществления изобретения будет описана далее со ссылкой на ФИГ. 6. ФИГ. 6 отображает последовательность действий, которая неоднократно выполняется блоком 1 ЭБУ. Эта последовательность действий заранее записывается в ПЗУ или аналогичное устройство ЭБУ 1.
[0049] В последовательности действий, отображенной на ФИГ. 6, в первую очередь на этапе S101 блок 1 ЭБУ генерирует информацию о маршруте движения, по которому должно двигаться транспортное средство, (информацию о маршруте движения), на основе выходного сигнала устройства 2 распознавания окружающей обстановки. Таким образом, блок 1 ЭБУ генерирует информацию о координатах местоположения и размерах твердого объекта, который может быть препятствием для транспортного средства, и указатель границы полосы движения в координатной системе с началом координат в точке текущего положения транспортного средства, и генерирует информацию о положении транспортного средства по отношению к твердому объекту и к границе полосы движения.
[0050] На этапе S102 блок 1 ЭБУ принимает решение на основе информации о маршруте движения, полученной на этапе S101, имеется или нет твердый объект, как препятствие, на траектории движения транспортного средства. Упомянутая здесь «траектория» представляет собой маршрут, который вычисляется, чтобы по нему двигалось транспортное средство в случае, когда транспортное средство двигается с сохранением текущей перегрузки от поперечного ускорения Gy0. Если на этапе S102 принято отрицательное решение, блок 1 ЭБУ временно останавливает выполнение настоящей последовательности действий. В случае, если на этапе S102 принято положительное решение, блок 1 ЭБУ переходит к этапу S103.
[0051] На этапе S103, блок 1 ЭБУ считывает выходной сигнал (перегрузку от поперечного ускорения транспортного средства в текущий момент времени) Gy0 с датчика 5 ускорения и оценивает диапазон траекторий движения транспортного средства по отношению к считанной перегрузке от поперечного ускорения Gy0. Таким образом, как указано в описании вышеупомянутой ФИГ. 2, блок 1 ЭБУ уточняет маршруты b1 и b2 путем прибавления нормального изменения ΔGy к перегрузке от поперечного ускорения Gy0 в данный момент времени и путем вычитания нормального изменения ΔGy из перегрузки от поперечного ускорения Gy0 в данный момент времени. Затем блок 1 ЭБУ уточняет маршрут b0 в случае, когда угла поворота рулевого колеса или поперечная составляющая ускорения постепенно изменяется на определенную величину в диапазоне от маршрута b1 до маршрута b2.
[0052] На этапе S104 блок 1 ЭБУ сравнивает положение твердого объекта в системе координат, сгенерированной на этапе S101, с диапазоном траекторий движения транспортного средства, определенном на этапе S103, и определяет, имеется или нет в диапазоне траекторий движения маршрут объезда, который позволяет объехать этот твердый объект. Иными словами, блок 1 ЭБУ определяет, можно ли избежать столкновения транспортного средства с твердым объектом в результате выполнения водителем обычных действий по управлению.
[0053] Если на этапе S104 принято положительное решение, блок 1 ЭБУ завершает выполнение текущего действия без активации вспомогательного управления транспортным средством. В случае, если на этапе S104 принято отрицательное решение, блок 1 ЭБУ переходит к выполнению шага S105.
[0054] На этапе S105 блок 1 ЭБУ предоставляет вспомогательное управление транспортным средством при помощи зуммера 10 или дисплея 11 или предоставляет вспомогательное управление при помощи электроусилителя руля (EPS) 12 и/или электронно-управляемого тормоза (ЕСВ) 13.
[0055] Согласно описанному выше варианту осуществления изобретения, если столкновения транспортного средства с твердым объектом можно избежать в результате выполнения водителем обычных действий по управлению, вспомогательное управление не осуществляется. Таким образом, вспомогательное управление удерживается от приведения в действие вопреки намерению водителя выполнить обычные действия по управлению.
[0056] Следует уточнить, что в соответствии с системой вспомогательного управления настоящего варианта осуществления изобретения, даже в том случае, когда водитель не имеет намерения совершить обычные действия по управлению (например, в случае, когда водитель невнимателен, водитель отвернулся и т.д.), вспомогательное управление не осуществляется до тех пор, пока в диапазоне траекторий движения имеется маршрут объезда. Но если транспортное средство приближается к твердому объекту, и маршрут объезда перестает быть в диапазоне траекторий движения, вспомогательное управление активируется до того, как транспортное средство столкнется с твердым объектом. Как следствие, даже в том случае, когда водитель не выполняет обычных действий по управлению, столкновения транспортного средства с твердым объектом можно избежать.
[0057] Кроме того, в данном варианте осуществления изобретения поперечная составляющая ускорения используется как параметр, показывающий меру движения транспортного средства. Однако, также возможно использовать угловую скорость рыскания, поперечную перегрузку G, боковую реактивную силу и т.п., но предпочтительно использовать параметр, который находится в зависимости от угловой скорости рыскания и скорости транспортного средства, такой, как поперечная составляющая ускорения или поперечная перегрузка G. Поперечная составляющая ускорения или поперечная перегрузка G возрастают с увеличением угловой скорости рыскания и скорости транспортного средства. Как следствие, в случае, когда поперечная составляющая ускорения или поперечная перегрузка G используются в качестве параметра, показывающего меру движения транспортного средства, диапазон траекторий движения транспортного средства, вычисляемый блоком 101 определения диапазона траекторий движения уже, когда скорость транспортного средства высокая ((а) на ФИГ. 7), по сравнению с тем, когда скорость транспортного средства низкая ((b) на ФИГ. 7), как показано на ФИГ. 7. Как следствие, временной интервал, в течение которого маршрут объезда перестает быть в диапазоне траекторий движения (временной интервал, в течение которого активируется вспомогательное управления) короче, когда скорость транспортного средства высокая, по сравнению с тем, когда скорость транспортного средства низкая. Как следствие, даже в том в случае, когда скорость движения транспортного средства высока, можно надежно избежать столкновения транспортного средства с твердым объектом.
[0058] (Второй вариант осуществления изобретения)
Второй вариант осуществления изобретения будет описан со ссылкой на ФИГ. 8. В этом случае будут описаны детали конфигурации, которые отличаются от деталей конфигурации описанного выше первого варианта осуществления изобретения, а описание сходных деталей конфигурации будет опущено.
[0059] Различие между описанным выше первым вариантом осуществления изобретения и настоящим вариантом осуществления изобретения заключается в том, что величина нормального изменения ΔGy изменяется в зависимости от скорости транспортного средства. В целом, величина поперечной составляющей ускорения, которая допустима при выполнении водителем обычных действий по управлению, выше в диапазоне низких скоростей, чем в диапазоне высоких скоростей.
[0060] Таким образом, как показано на ФИГ. 8, нормальное изменение ΔGy может возрастать, если скорость транспортного средства снижается в диапазоне, где скорость транспортного средства ниже определенной скорости транспортного средства V0, и может быть фиксированным как постоянное значение в диапазоне, где скорость транспортного средства равна обычной скорости транспортного средства V0 или выше ее. Здесь следует заметить, что определенная скорость транспортного средства V0 представляет собой значение, которое получают заранее на основе статистических данных.
[0061] Если нормальное изменение ΔGy меняется в зависимости от скорости транспортного средства, можно сократить количество ситуаций, в которых вспомогательное управление осуществляется против намерения водителя, когда транспортное средство движется с низкой скоростью, а временной интервал, в течение которого приводится в действие вспомогательное управление, может задан настолько поздним, насколько это возможно. Кроме того, также возможно избежать ситуации, где временной интервал, в течение которого активируется вспомогательное управление, становится большим, когда транспортное средство движется с высокой скоростью.
описание ссылочных номеров
[0062] 1 Блок 1 Эбу
2 УСТРОЙСТВО РАСПОЗНАВАНИЯ ОКРУЖАЮЩЕЙ ОБСТАНОВКИ
3 ДАТЧИК УГЛОВОЙ СКОРОСТИ РЫСКАНИЯ
4 ДАТЧИКИ СКОРОСТИ ВРАЩЕНИЯ КОЛЕС
5 ДАТЧИК УСКОРЕНИЯ
6 ДАТЧИК ТОРМОЗНОГО МЕХАНИЗМА
7 ДАТЧИК СОСТОЯНИЯ ПЕДАЛИ АКСЕЛЕРАТОРА
8 ДАТЧИК УГЛА ПОВОРОТА РУЛЕВОГО КОЛЕСА
9 ДАТЧИК МОМЕНТА РУЛЕВОГО УПРАВЛЕНИЯ
10 ЗУММЕР 11 ДИСПЛЕЙ
12 ЭЛЕКТРОУСИЛИТЕЛЬ РУЛЯ
13 ЭЛЕКТРОННО-УПРАВЛЯЕМЫЙ ТОРМОЗ
100 БЛОК РАСПОЗНАВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ
101 БЛОК ОПРЕДЕЛЕНИЯ ДИАПАЗОНА ТРАЕКТОРИЙ ДВИЖЕНИЯ
102 БЛОК ОПРЕДЕЛЕНИЯ НЕОБХОДИМОСТИ ВСПОМОГАТЕЛЬНОГО УПРАВЛЕНИЯ
103 БЛОК ОПРЕДЕЛЕНИЯ НЕОБХОДИМОСТИ ПРЕДУПРЕЖДЕНИЯ
104 БЛОК ОПРЕДЕЛЕНИЯ НЕОБХОДИМОСТИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
105 БЛОК РАСЧЕТА РЕГУЛИРУЕМЫХ ПАРАМЕТРОВ.
Изобретение относится к предоставлению вспомогательного управления для объезда твердого объекта на пути движения транспортного средства.
В системе, которая помогает избежать столкновения транспортного средства, определяется диапазон траекторий движения, как множество маршрутов, по которым следует двигаться транспортному средству в рамках обычных действий по управлению, осуществляемых водителем, при этом вспомогательное управление не осуществляется, если в диапазоне траекторий движения имеется маршрут, позволяющий объехать твердый объект, и, напротив, вспомогательное управление транспортным средством осуществляется, если в диапазоне траекторий движения отсутствует маршрут, позволяющий объехать твердый объект. Обеспечивается вспомогательное управление транспортным средством, не причиняющего беспокойство водителю, в системе, которая помогает избежать столкновения транспортного средства. 4 з.п. ф-лы, 8 ил.
1. Система вспомогательного управления транспортным средством, характеризующаяся тем, что включает:
средство распознавания для идентификации твердых объектов, находящихся вокруг транспортного средства;
средство сбора информации для определения текущей меры движения транспортного средства; и
средство вспомогательного управления для предоставления вспомогательного управления, чтобы избежать столкновения с твердым объектом, при условии, что маршрут объезда, позволяющий избежать столкновения с твердым объектом, идентифицированным средством распознавания, отсутствует в диапазоне траекторий движения, как в множестве маршрутов, по которым следует двигаться транспортному средству, если изменение меры движения, осуществляемого водителем в рамках обычных действий по управлению, возрастает или убывает по отношению к мере движения, полученной средством сбора информации.
2. Система вспомогательного управления транспортным средством по п. 1, в которой
это изменение устанавливают большим, когда скорость движения транспортного средства низкая, по сравнению с тем, когда скорость движения транспортного средства высокая.
3. Система вспомогательного управления транспортным средством по п. 1 или 2, в которой
мера движения представляет собой параметр, который делает диапазон траекторий движения транспортного средства уже, когда скорость движения транспортного средства высокая, по сравнению с тем, когда скорость движения транспортного средства низкая.
4. Система вспомогательного управления транспортным средством по п. 3, в которой
мера движения представляет собой параметр, который согласуется с ускорением в направлении, поперечном движению транспортного средства.
5. Система вспомогательного управления транспортным средством по п. 1 или 2, в которой
средство вспомогательного управления предоставляет вспомогательное управление, чтобы избежать столкновения с твердым объектом, если длина самого протяженного из маршрутов, включенных в диапазон траекторий движения, становится равной пороговому значению или меньше его в случае, когда в диапазоне траекторий движения отсутствует маршрут объезда.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АКТИВНОЙ БЕЗОПАСНОСТИ ТРАНСПОРТНЫХ СРЕДСТВ ПРИ ДВИЖЕНИИ В КОЛОННЕ | 2007 |
|
RU2388057C2 |
| Способ получения изопропанола | 1973 |
|
SU512695A3 |

