Область техники
Настоящее изобретение относится к устройству соединения/разъединения для сцепления и, в частности, относится к устройству соединения/разъединения для сцепления, причем устройство выполнено с возможностью соединять и разъединять сцепление посредством передачи силы нажатия от педали сцепления в качестве рабочей силы для цилиндра сцепления.
Уровень техники
Известно устройство соединения/разъединения, которое соединяет и разъединяет сцепление, которое размещено в тракте передачи мощности между двигателем и трансмиссией. Например, известно устройство соединения/разъединения, раскрытое в публикации заявки на патент Японии № 2006-336783 (JP 2006-336783 А). Устройство соединения/разъединения выполнено с возможностью соединять и разъединять сцепление посредством передачи силы нажатия от педали сцепления в качестве рабочей силы для цилиндра сцепления и работы цилиндра сцепления с помощью рабочей силы. В JP 2006-336783 А, устройство соединения/разъединения включает в себя электрический актуатор (вспомогательное устройство сцепления), которое помогает силе нажатия педали сцепления. Когда работа электрического актуатора управляется в соответствии с силой нажатия педали сцепления, осуществляется помощь в работе сцепления.
Сущность изобретения
Известно управление (в дальнейшем в этом документе, управление движением накатом) для повышения эффективности использования топлива посредством автоматического расцепления сцепления посредством электрического актуатора без операции водителя в ходе движения транспортного средства. Когда управление движением накатом применяется к устройству соединения/разъединения из JP 2006-336783 А, считается, что электрический актуатор автоматически расцепляет сцепление. Тем не менее, устройство соединения/разъединения в JP 2006-336783 А сконфигурировано таким образом, что педаль сцепления, электрический актуатор и цилиндр сцепления механически взаимно сцепляются между собой. Соответственно, во время управления движением накатом, местоположение хода педали сцепления может изменяться в соответствии с работой электрического актуатора, что может вызывать дискомфорт у водителя.
Настоящее изобретение предоставляет устройство соединения/разъединения для сцепления, причем устройство может предотвращать изменение местоположения хода педали сцепления во время управления движением накатом.
Первый аспект настоящего изобретения относится к устройству соединения/разъединения для сцепления. Устройство соединения/разъединения включает в себя педаль сцепления, цилиндр сцепления, механизм передачи мощности, электрический актуатор и разделительный механизм. Педаль сцепления выполнена с возможностью управляться водителем. Механизм передачи мощности выполнен с возможностью передавать силу нажатия педали сцепления в качестве рабочей силы для цилиндра сцепления. Электрический актуатор соединяется с механизмом передачи мощности, с тем чтобы обеспечивать возможность передачи мощности. Электрический актуатор выполнен с возможностью прикладывать рабочую силу к цилиндру сцепления через механизм передачи мощности. Разделительный механизм предоставляется на участке тракта передачи мощности в механизме передачи мощности, причем участок находится между педалью сцепления и электрическим актуатором.
Согласно конфигурации, поскольку разделительный механизм предоставляется на механизме передачи мощности, разделительный механизм разделяет педаль сцепления и цилиндр сцепления, когда электрический актуатор прикладывает рабочую силу к цилиндру сцепления в то время, когда педаль сцепления не нажимается. Следовательно, можно предотвращать ситуацию, когда местоположение хода педали сцепления изменяется, хотя водитель не нажимает педаль сцепления.
Устройство соединения/разъединения дополнительно может включать в себя электронный модуль управления. Электронный модуль управления может быть выполнен с возможностью управлять электрическим актуатором таким образом, чтобы уменьшать силу нажатия, сформированную посредством нажатия педали сцепления, и прикладывать рабочую силу в направлении расцепления сцепления к цилиндру сцепления, когда водитель нажимает педаль сцепления.
Согласно конфигурации, когда водитель нажимает педаль сцепления, электрический актуатор прикладывает рабочую силу в направлении уменьшения силы нажатия педали сцепления к цилиндру разъединения сцепления. Как результат, может уменьшаться сила нажатия, необходимая для водителя, чтобы нажимать педаль сцепления.
Устройство соединения/разъединения дополнительно может включать в себя электронный модуль управления, выполненный с возможностью управлять электрическим актуатором таким образом, чтобы расцеплять сцепление, когда водитель не нажимает педаль сцепления.
Согласно конфигурации, когда водитель не нажимает педаль сцепления, электрический актуатор расцепляет сцепление. Соответственно, по мере того, как сопротивление движению, прикладываемое к транспортному средству, уменьшается, и расстояние движения по инерции становится большим, может улучшаться эффект снижения расхода топлива.
В устройстве соединения/разъединения, механизм передачи мощности может включать в себя главный цилиндр сцепления, первый цилиндр и второй цилиндр. Главный цилиндр сцепления может быть размещен между педалью сцепления и разделительным механизмом. Первый цилиндр и второй цилиндр могут быть размещены между главным цилиндром сцепления и цилиндром сцепления. Разделительный механизм и электрический актуатор могут быть размещены между первым цилиндром и вторым цилиндром.
Согласно конфигурации, разделительный механизм и электрический актуатор размещены между первым цилиндром и вторым цилиндром. Соответственно, посредством регулирования площади приема давления первого цилиндра и второго цилиндра, рабочая сила, которая должна выводиться из электрического актуатора, может снижаться. Это позволяет уменьшать размер электрического актуатора и уменьшать потребление мощности.
В устройстве соединения/разъединения, механизм передачи мощности может включать в себя главный цилиндр сцепления, соединенный с цилиндром сцепления через масляный канал. Разделительный механизм и электрический актуатор могут быть размещены между педалью сцепления и главным цилиндром сцепления.
Согласно конфигурации, поскольку разделительный механизм и электрический актуатор размещены между педалью сцепления и главным цилиндром, устройство соединения/разъединения может упрощаться, и увеличение числа частей может подавляться.
В устройстве соединения/разъединения, разделительный механизм может включать в себя первый элемент, второй элемент и механизм удержания позиции педали. Первый элемент может быть выполнен с возможностью взаимно сцепляться с педалью сцепления. Второй элемент может быть выполнен с возможностью взаимно сцепляться с цилиндром сцепления и входить в контакт с первым элементом в то время, когда педаль сцепления нажимается. Механизм удержания позиции педали может быть выполнен с возможностью формировать удерживающую силу, чтобы удерживать первый элемент в позиции, в которой нажатие педали сцепления прекращается.
Согласно конфигурации, когда электрический актуатор отодвигает второй элемент от первого элемента, механизм удержания позиции педали удерживает первый элемент в позиции, в которой нажатие педали сцепления прекращается. Это позволяет предотвращать изменение местоположения хода педали сцепления, вызываемое посредством работы электрического актуатора.
Краткое описание чертежей
Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
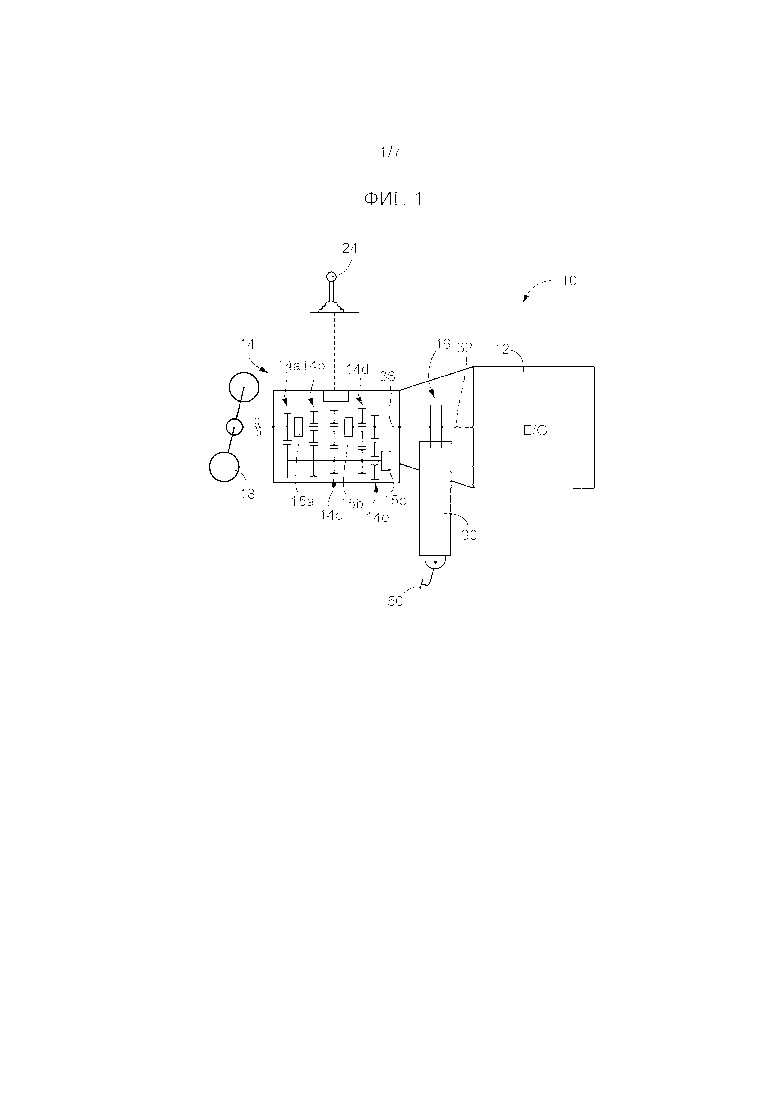
Фиг. 1 схематично иллюстрирует часть модуля приведения в движение и систему управления модуля приведения в движение, включенного в транспортное средство, к которому применяется настоящее изобретение;
Фиг. 2 иллюстрирует упрощенную конструкцию сцепления с фиг. 1 и упрощенную конструкцию устройства соединения/разъединения для соединения и разъединения сцепления;
Фиг. 3 иллюстрирует состояние, в котором педаль сцепления нажимается водителем в устройстве соединения/разъединения с фиг. 2;
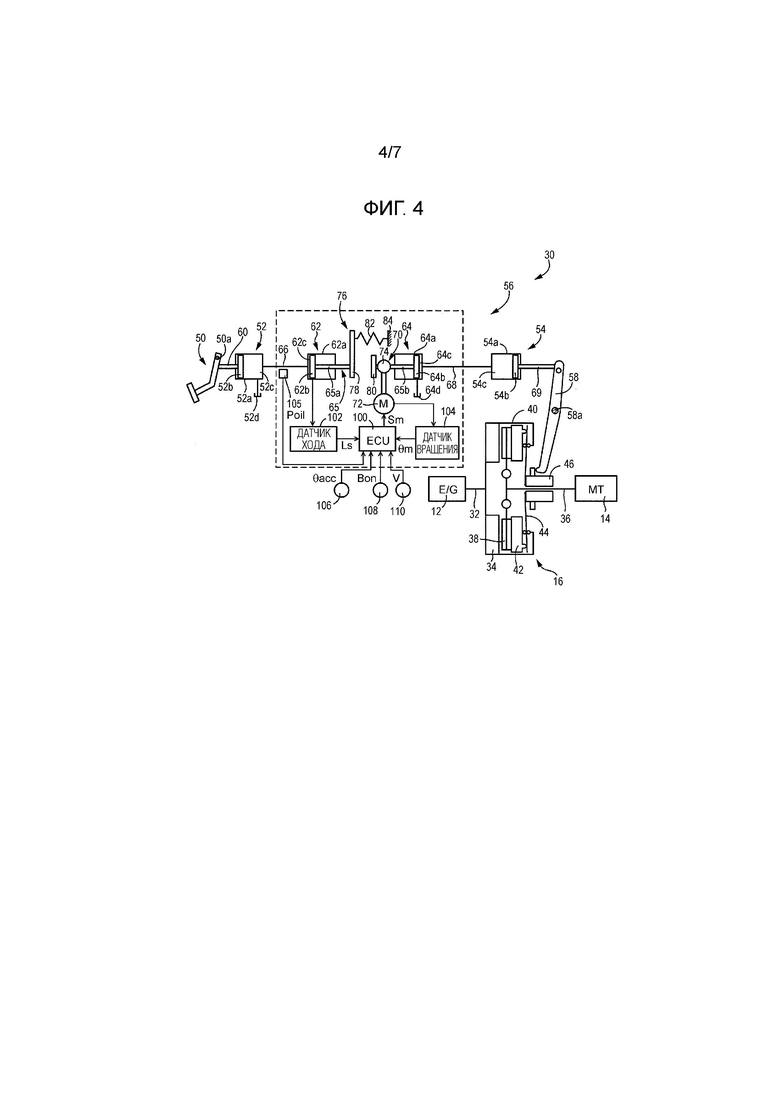
Фиг. 4 иллюстрирует состояние, в котором электрический актуатор отодвигает второй элемент от первого элемента в устройстве соединения/разъединения с фиг. 2;
Фиг. 5 является функциональной блок-схемой для описания функции управления электронным модулем управления, включенным в устройство соединения/разъединения с фиг. 2;
Фиг. 6 является блок-схемой последовательности операций способа для описания основной части операции управления электронного модуля управления с фиг. 5, причем основная часть включает в себя операцию управления устройства соединения/разъединения в режиме нормального движения, в котором осуществляется операция с педалью сцепления; и
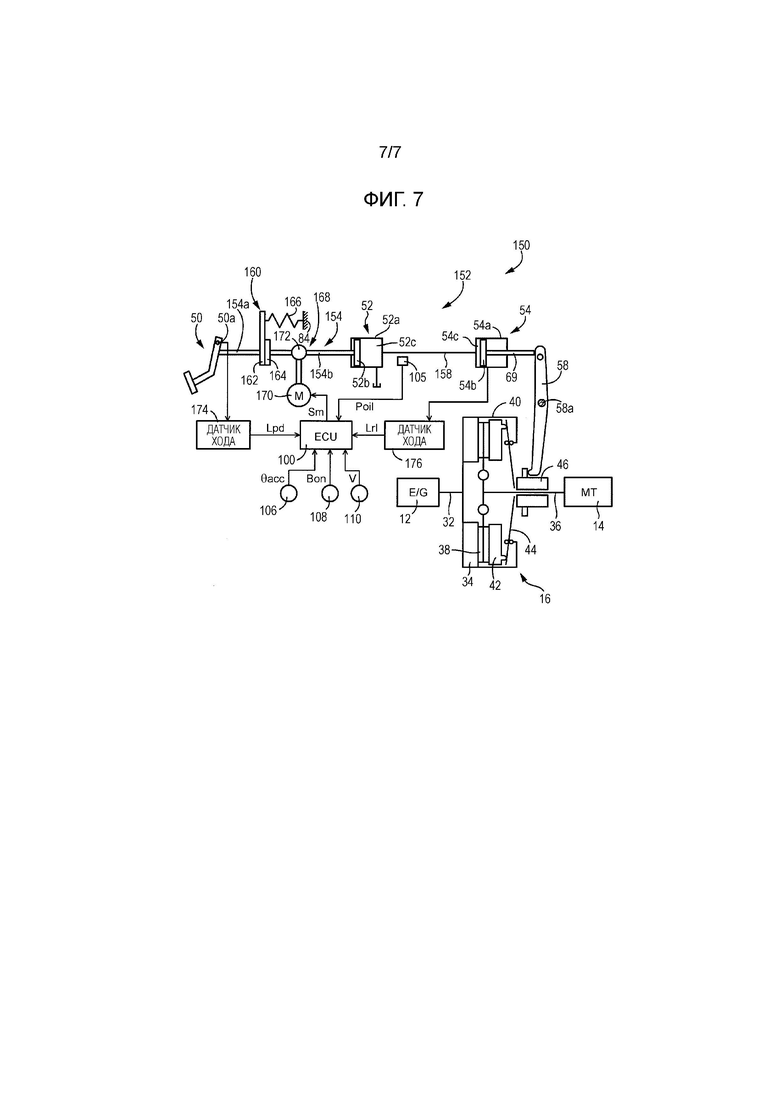
Фиг. 7 иллюстрирует упрощенную конструкцию сцепления, соответствующей другому варианту осуществления настоящего изобретения, и упрощенную конструкцию устройства соединения/разъединения, которое соединяет и разъединяет сцепление.
Подробное описание вариантов осуществления изобретения
Далее подробно описываются варианты осуществления настоящего изобретения со ссылкой на прилагаемые чертежи. В нижеприведенных вариантах осуществления, чертежи упрощаются или искажаются по мере необходимости, и подробности каждого компонента, такие как пропорция и форма, могут отличаться от пропорции и формы реальных компонентов.
Фиг. 1 является принципиальной схемой, схематично иллюстрирующей часть модуля 10 приведения в движение, включенного в транспортное средство, к которому применяется настоящее изобретение. Как проиллюстрировано на фиг. 1, модуль 10 приведения в движение включает в себя двигатель 12 и механическую трансмиссию 14 с ручным управлением. В тракте передачи мощности между двигателем 12 и механической трансмиссией 14 с ручным управлением, предоставляется сцепление 16, которое функционирует в качестве механизма соединения/разъединения. Сцепление 16 надлежащим образом соединяется и разъединяется посредством устройства соединения/разъединения 30. Ниже описывается конструкция и работа устройства соединения/разъединения 30.
Двигатель 12 представляет собой источник мощности приведения в движение, который формирует мощность приведения в движение для движения модуля 10 приведения в движение. Например, двигатель 12 представляет собой двигатель внутреннего сгорания, к примеру, бензиновый двигатель или дизельный двигатель. Двигатель 12 формирует мощность приведения в движение посредством сгорания топлива, которое впрыскивается в цилиндр. Сцепление 16 обычно находится в состоянии зацепления, чтобы соединять тракт передачи мощности между двигателем 12 и механической трансмиссией 14 с ручным управлением. Когда операция нажатия педали 50 сцепления выполнена, или когда нижеописанный электронный модуль 100 управления выполняет операцию управления, сцепление 16 переводится в состояние проскальзывания, в котором перегрузочная способность по крутящему моменту снижается, или в разъединенное состояние без передачи мощности, в котором тракт передачи мощности между двигателем 12 и механической трансмиссией 14 с ручным управлением разъединяется. Таким образом, сцепление 16 представляет собой устройство соединения/разъединения, которое соединяет и разъединяет передачу мощности, расходуемой на движение, выводимой из двигателя 12, в механическую трансмиссию 14 с ручным управлением.
Механическая трансмиссия 14 с ручным управлением представляет собой параллельный двухвальный ступенчатый трансмиссионный механизм (механическую трансмиссию с ручным управлением), предоставленный в тракте передачи мощности между двигателем 12 и ведущими колесами 18. Механическая трансмиссия 14 с ручным управлением замедляет или ускоряет вращение, вводимое из двигателя 12 при указанном передаточном отношении γ, посредством выбора одной ступени зубчатой передачи из множества ступеней зубчатой передачи (ступеней переключения передач) через ручную операцию рычага 24 переключения передач водителем и выводит вращение. Механическая трансмиссия 14 с ручным управлением включает в себя множество зубчатых пар 14a-14e, причем каждая пара постоянно зубчатым образом зацепляется между собой между двумя вращательными валами. Когда шестерни в паре, соответствующей любой ступени зубчатой передачи, которая должна переключаться, соединяются между собой между вращательными валами таким образом, чтобы обеспечивать возможность передачи мощности, ступень зубчатой передачи из числа пяти ступеней зубчатой передачи переднего хода и ступени зубчатой передачи заднего хода устанавливается, причем ступени зубчатой передачи переднего хода включают в себя, например, от первой ступени зубчатой передачи до пятой ступени зубчатой передачи.
Механизмы 15a-15c синхронизации коробки передач (механизм синхронизации) синхронизируют частоты вращения вращательных валов, которые отличаются в частоте вращения. Плавное переключение передач достигается, когда механизмы 15a-15c синхронизации коробки передач работают во время переключения передач. Когда ни одна из ступеней зубчатой передачи не выбирается, механическая трансмиссия 14 с ручным управлением находится в состоянии нейтрали (в разъединенном состоянии без передачи мощности). Таким образом, когда рычаг 24 переключения передач управляется так, что он находится в рабочей позиции переключения, соответствующей указанной ступени зубчатой передачи, ступень зубчатой передачи механической трансмиссии 14 с ручным управлением переключается на выбранную ступень зубчатой передачи. Когда рычаг 24 переключения передач переключается в позицию нейтрали, в которой ни одна из ступеней зубчатой передачи не выбирается, механическая трансмиссия 14 с ручным управлением находится в состоянии нейтрали. Таким образом, модуль 10 приведения в движение представляет собой транспортное средство с механической трансмиссией с ручным управлением (транспортное MT-средство), включающее в себя механическую трансмиссию 14 с ручным управлением, которая избирательно формирует множество ступеней зубчатой передачи посредством ручной операции рычага 24 переключения передач водителем.
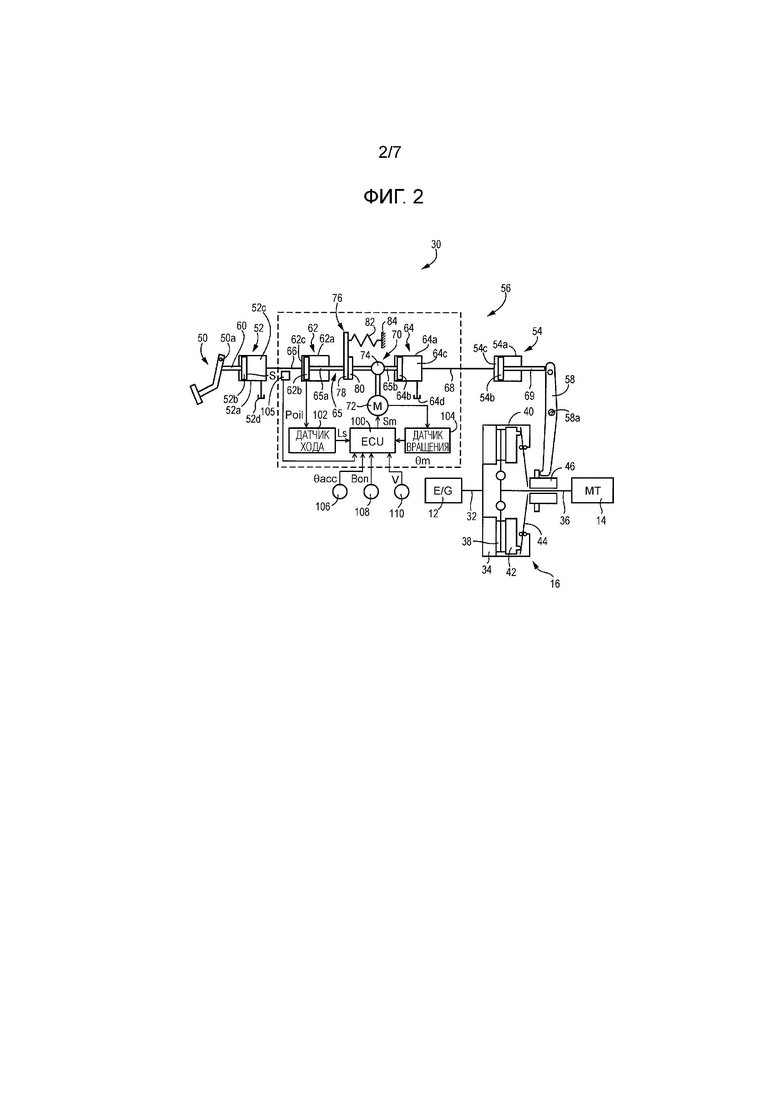
Фиг. 2 иллюстрирует упрощенную конструкцию сцепления 16 на фиг. 1 и упрощенную конструкцию устройства соединения/разъединения 30 для соединения и разъединения сцепления 16. Фиг. 2 иллюстрирует неактивное состояние нижеописанного электрического актуатора 70, в котором водитель не нажимает педаль 50 сцепления.
Сцепление 16 сконфигурировано так, чтобы включать в себя маховик 34, присоединенный к выходному валу 32 двигателя 12, диск 38 сцепления, присоединенный к входному передаточному валу 36 механической трансмиссии 14 с ручным управлением, крышку 40 сцепления, соединенную с маховиком 34, и прижимную пластину 42, размещенную в крышке 40 сцепления. Сцепление 16 также сконфигурировано так, чтобы включать в себя диафрагменную пружину 44, которая формирует поджимающую силу, чтобы прижимать диск 38 сцепления к маховику 34, и выжимной подшипник 46, размещенный на внешней периферийной стороне входного передаточного вала 36, причем выжимной подшипник 46 является подвижным относительно входного передаточного вала 36 в осевом направлении входного передаточного вала 36.
Когда сцепление 16 находится в зацепленном состоянии, диафрагменная пружина 44 прижимает прижимную пластину 42 и диск 38 сцепления к маховику 34. В это время, маховик 34 и диск 38 сцепления находятся в плотном контакте между собой. Когда выжимной подшипник 46 аксиально перемещается в сторону двигателя 12, внутренняя периферийная сторона диафрагменной пружины 44 прижимается таким образом, что диафрагменная пружина 44 деформируется. Как результат, поджимающая сила для прижатия диска 38 сцепления к маховику 34 уменьшается. Когда выжимной подшипник 46 достигает указанной позиции, поджимающая сила диафрагменной пружины 44, прижимающей диск 38 сцепления к маховику 34, становится нулевой, так что диск 38 сцепления отделяется от маховика 34. В это время сцепление 16 расцеплено (отсоединено).
Устройство соединения/разъединения 30 предоставляется с возможностью соединять и разъединять сцепление 16. Устройство соединения/разъединения 30 выполнено с возможностью включать в себя педаль 50 сцепления, управляемую водителем, цилиндр 54 разъединения сцепления (в дальнейшем цилиндр 54 разъединения), который принимает силу нажатия педали 50 сцепления, передаваемую в качестве рабочей силы, механизм 56 передачи мощности, который передает силу нажатия педали 50 сцепления в качестве рабочей силы для цилиндра 54 разъединения, и выжимную вилку 58, которая передает рабочую величину цилиндра 54 разъединения в выжимной подшипник 46. Цилиндр 54 разъединения соответствует цилиндру привода сцепления настоящего изобретения.
Педаль 50 сцепления поворачивается вокруг точки 50a опоры, когда водитель нажимает педаль 50 сцепления.
Механизм 56 передачи мощности составляет тракт передачи мощности между педалью 50 сцепления и цилиндром 54 разъединения. Таким образом, механизм 56 передачи мощности соединяет педаль 50 сцепления с цилиндром 54 разъединения, чтобы обеспечивать возможность передачи мощности (функционально).
Механизм 56 передачи мощности включает в себя главный цилиндр 52 сцепления (в дальнейшем главный цилиндр 52), который преобразует силу Fft нажатия педали 50 сцепления, предоставленную водителем, в гидравлическое давление, первый цилиндр 62, функционально соединенный с главным цилиндром 52, и второй цилиндр 64, размещенный между первым цилиндром 62 и цилиндром 54 разъединения.
Педаль 50 сцепления и главный цилиндр 52 соединяются функционально (механически) через соединительный стержень 60. Главный цилиндр 52 и первый цилиндр 62 функционально соединяются через первый масляный канал 66. Первый цилиндр 62 и второй цилиндр 64 соединяются функционально (механически) через соединительный стержень 65. Второй цилиндр 64 и цилиндр 54 разъединения функционально соединяются через второй масляный канал 68.
Главный цилиндр 52 включает в себя цилиндрический корпус 52a цилиндра, дискообразный поршень 52b, включенный с возможностью скольжения в корпус 52a цилиндра, камеру 52c нагнетания гидравлического давления, которая формируется в корпусе 52a цилиндра и заполняется гидравлической жидкостью, и расширительный бачок 52d для резервирования гидравлической жидкости. Поршень 52b и педаль 50 сцепления механически соединяются через соединительный стержень 60. Когда педаль 50 сцепления нажимается, поршень 52b перемещается в корпусе 52a цилиндра в соответствии с величиной нажатия. В это время, гидравлическое давление формируется в камере 52c нагнетания гидравлического давления.
Первый цилиндр 62 выполнен с возможностью включать в себя цилиндрический корпус 62a цилиндра, дискообразный поршень 62b, включенный с возможностью скольжения в корпус 62a цилиндра, и камеру 62c нагнетания гидравлического давления, которая формируется в корпусе 62a цилиндра и заполняется гидравлической жидкостью. Камера 52c нагнетания гидравлического давления главного цилиндра 52 и камера 62c нагнетания гидравлического давления первого цилиндра 62 функционально соединяются через первый масляный канал 66. В частности, когда гидравлическое давление, сформированное в главном цилиндре 52, передается в первый цилиндр 62 через первый масляный канал 66, поршень 62b первого цилиндра 62 прижимается. Как следствие, поршень 62b перемещается в корпусе 62a цилиндра.
Второй цилиндр 64 выполнен с возможностью включать в себя цилиндрический корпус 64a цилиндра, дискообразный поршень 64b, включенный с возможностью скольжения в корпус 64a цилиндра, камеру 64c нагнетания гидравлического давления, которая формируется в корпусе 64a цилиндра и заполняется гидравлической жидкостью, и расширительный бачок 64d. Поршень 62b первого цилиндра 62 и поршень 64b второго цилиндра 64 функционально (механически) соединяются через соединительный стержень 65. Когда поршень 62b аксиально перемещается в сторону цилиндра 54 разъединения, поршень 64b аксиально перемещается пропорционально величине перемещения поршня 62b через соединительный стержень 65. Соединительный стержень 65 состоит из первого стержня 65a и второго стержня 65b, которые размещены последовательно. Нижеописанный разделительный механизм 76 размещается между первым стержнем 65a и вторым стержнем 65b.
Цилиндр 54 разъединения выполнен с возможностью включать в себя цилиндрический корпус 54a цилиндра, дискообразный поршень 54b, включенный с возможностью скольжения в корпус 54a цилиндра, и камеру 54c нагнетания гидравлического давления, которая формируется в цилиндре 54 разъединения и заполняется гидравлической жидкостью. Камера 54c нагнетания гидравлического давления цилиндра 54 разъединения и камера 64c нагнетания гидравлического давления второго цилиндра 64 функционально соединяются через второй масляный канал 68. В частности, когда поршень 64b второго цилиндра 64 перемещается, гидравлическое давление, сформированное в камере 64c нагнетания гидравлического давления, передается в цилиндр 54 разъединения через второй масляный канал 68. Соответственно, поршень 54b цилиндра 54 разъединения прижимается таким образом, что поршень 54b перемещается. Поршень 54b соединяется со стержнем 69 толкателя, и стержень 69 толкателя перемещается как единое целое с поршнем 54b.
Следовательно, в механизме 56 передачи мощности, сила Fft нажатия, сформированная, когда педаль 50 сцепления нажимается, передается как рабочая сила для цилиндра 54 разъединения через главный цилиндр 52 сцепления, первый масляный канал 66, первый цилиндр 62, соединительный стержень 65, второй цилиндр 64 и второй масляный канал 68. Когда рабочая сила передается в цилиндр 54 разъединения, стержень 69 толкателя, соединенный с поршнем 54b цилиндра 54 разъединения, аксиально перемещается таким образом, чтобы прижимать один концевой участок выжимной вилки 58. В это время, выжимная вилка 58 поворачивается вокруг точки опоры 58a, и другой концевой участок выжимной вилки 58 прижимает выжимной подшипник 46 сцепления 16. Как результат, сцепление 16 расцепляется с перемещением выжимного подшипника 46.
Второй стержень 65b, который составляет соединительный стержень 65, соединяется с электрическим актуатором 70. Электрический актуатор 70 соединяется со вторым стержнем 65b (механизмом 56 передачи мощности) таким образом, чтобы обеспечивать возможность передачи мощности, чтобы обеспечивать приложение рабочей силы к цилиндру 54a разъединения через второй стержень 65b (механизм 56 передачи мощности). Электрический актуатор 70 состоит из электромотора 72 и редуктора 74, соединенных со вторым стержнем 65b, с тем чтобы обеспечивать возможность передачи мощности.
Электромотор 72 вращательно приводится в действие посредством нижеописанного электронного модуля 100 управления. Редуктор 74 представляет собой механизм, например, состоящий из шарикового винта, чтобы преобразовывать вращательное перемещение электромотора 72 в осевое поступательное перемещение второго стержня 65b. Следовательно, когда электромотор 72 вращается, осевая рабочая сила прикладывается ко второму стержню 65b. Соответственно, второй стержень 65b перемещается в осевом направлении в соответствии с позицией вращения.
Между первым стержнем 65a и вторым стержнем 65b, которые составляют соединительный стержень 65, предусмотрен разделительный механизм 76, который может соединять и разъединять первый стержень 65a и второй стержень 65b. Другими словами, разделительный механизм 76 предоставляется на участке механизма 56 передачи мощности, причем участок находится между педалью 50 сцепления и электрическим актуатором 70 (редуктором 74). Разделительный механизм 76 включает в себя первый элемент 78 пластинчатой формы, соединенный с концом оси первого стержня 65a, второй элемент 80 пластинчатой формы, соединенный с концом оси второго стержня 65b, и механизм 82 удержания позиции педали, соединенный с первым элементом 78. Первый элемент 78 выполнен с возможностью взаимно сцепляться с педалью 50 сцепления через главный цилиндр 52 и первый цилиндр 62, и второй элемент 80 выполнен с возможностью взаимно сцеплять второй цилиндр 64 с цилиндром 54 разъединения.
Первый элемент 78 и второй элемент 80 размещены таким образом, что их поверхности пластины обращены друг к другу, и таким образом, что их поверхности пластины находятся в контакте между собой, когда педаль 50 сцепления нажимается. Механизм 82 удержания позиции педали размещается между первым элементом 78 и закрепленным элементом 84. Механизм 82 удержания позиции педали состоит из упругого элемента, такого как пружина, чтобы формировать удерживающую силу Fkeep, которая удерживает первый элемент 78 в позиции прекращения нажатия, в которой нажатие педали 50 сцепления прекращается. Позиция первого элемента 78, проиллюстрированного на фиг. 2, соответствует позиции прекращения нажатия. На фиг. 2, нажатие педали 50 сцепления прекращается. В это время, первый элемент 78 удерживается в позиции прекращения нажатия посредством удерживающей силы Fkeep механизма 82 удержания позиции педали. Удерживающая сила Fkeep получается заранее посредством экспериментов или согласно расчетам. Удерживающая сила Fkeep задается, по меньшей мере, достаточно большой для того, чтобы предотвращать перемещение педали 50 сцепления, когда водитель просто ставит ногу на педаль 50 сцепления.
На фиг. 2, второй элемент 80 перемещается в позицию, в которой сцепление 16 полностью зацепляется, когда поджимающая сила (возвратная сила упругости) из диафрагменной пружины 44 передается через выжимной подшипник 46, выжимную вилку 58, цилиндр 54 разъединения, второй цилиндр 64 и второй стержень 65b. В настоящем варианте осуществления, в состоянии, в котором водитель не нажимает педаль 50 сцепления, и электрический актуатор 70 является неактивным, первый элемент 78 и второй элемент 80 регулируются, чтобы входить в контакт между собой в разделительном механизме 76.
Фиг. 3 иллюстрирует состояние, в котором сцепление 16 расцепляется, поскольку водитель нажимает педаль 50 сцепления. Когда педаль 50 сцепления нажимается, гидравлическое давление формируется в камере 52c нагнетания гидравлического давления главного цилиндра 52, и сформированное гидравлическое давление передается в камеру 62c нагнетания гидравлического давления первого цилиндра 62 через первый масляный канал 66. Гидравлическое давление заставляет первый цилиндр 62 работать и заставляет поршень 62b и первый стержень 65a, соединенный с поршнем 62b, аксиально перемещаться в сторону цилиндра 54 разъединения (в правую сторону на странице). В это время, первый элемент 78, соединенный с первым стержнем 65a, перемещается в сторону цилиндра 54 разъединения против удерживающей силы Fkeep механизма 82 удержания позиции педали до тех пор, пока первый элемент 78 не достигнет позиции прекращения зацепления сцепления 16, проиллюстрированной на фиг. 3.
На фиг. 3, второй элемент 80 прижимается посредством первого элемента 78 таким образом, чтобы он перемещается в позицию прекращения зацепления сцепления 16, проиллюстрированной на фиг. 3. В это время, прижимающая сила из первого элемента 78 передается во второй элемент 80, когда первый элемент 78 и второй элемент 80 входят в контакт между собой в разделительном механизме 76. Кроме того, поскольку второй стержень 65b, соединенный со вторым элементом 80, перемещается в сторону цилиндра 54 разъединения, поршень 64b перемещается в сочетании со вторым стержнем 65b. В это время, гидравлическое давление формируется в камере 64c нагнетания гидравлического давления второго цилиндра 64, и гидравлическое давление передается в камеру 54c нагнетания гидравлического давления цилиндра 54 разъединения через второй масляный канал 68. Поскольку поршень 54b цилиндра 54 разъединения прижимается посредством гидравлического давления, поршень 54b и стержень 69 толкателя перемещаются в сторону расцепления сцепления 16. Соответственно, сцепление 16 расцепляется через выжимную вилку 58.
Фиг. 4 иллюстрирует состояние, в котором водитель не нажимает педаль 50 сцепления, и в силу этого электрический актуатор 70 расцепляет сцепление 16. Когда электрический актуатор 70 приводится в действие, второй стержень 65b аксиально перемещается в сторону цилиндра 54 разъединения, так что гидравлическое давление формируется в камере 64c нагнетания гидравлического давления второго цилиндра 64. Сформированное гидравлическое давление передается в камеру 54c нагнетания гидравлического давления в качестве рабочей силы для цилиндра 54 разъединения. В связи с передачей, поршень 54b цилиндра 54 разъединения перемещается, и стержень 69 толкателя, соединенный поршнем 54b, перемещается в сторону расцепления сцепления 16. Как результат, выжимная вилка 58 прижимается, и сцепление 16 расцепляется. Таким образом, электрический актуатор 70 выполнен с возможностью прикладывать рабочую силу, которая может расцеплять сцепление 16.
На фиг. 4, механизм 82 удержания позиции педали удерживает первый элемент 78 в позиции прекращения нажатия педали 50 сцепления. В силу осевого перемещения второго стержня 65b, второй элемент 80 перемещается в сторону (в сторону цилиндра 54 разъединения) в направлении от первого элемента 78. Следовательно, первый элемент 78 дистанцируется от второго элемента 80, так что первый элемент 78 и второй элемент 80 разделяются в разделительном механизме 76. Следовательно, даже когда электрический актуатор 70 расцепляет сцепление 16, разделительный механизм 76 разделяет первый элемент 78 и вторые элементы 80, что предотвращает взаимное сцепление первого стержня 65a и второго стержня 65b. Как результат, педаль 50 сцепления удерживается в позиции прекращения нажатия.
Состояние, проиллюстрированное на фиг. 4, достигается, когда состояние движения по инерции для выполнения движения по инерции устанавливается, и в силу этого запрос на автоматическое управление электрического актуатора 70 выводится, и электрический актуатор 70 управляется. Когда сцепление 16 расцепляется во время движения по инерции, тракт передачи мощности между двигателем 12 и механической трансмиссией 14 с ручным управлением разъединяется. Соответственно, сопротивление движению, прикладываемое к транспортному средству, снижается, и расстояние движения по инерции (и время движения по инерции), при котором является возможным движение по инерции, увеличивается. Здесь, в настоящем варианте осуществления, двигатель 12 остановлен во время движения по инерции, в котором сцепление 16 расцепляется. Следовательно, когда расстояние движения по инерции (и время движения по инерции) увеличивается с расцеплением сцепления 16 во время движения по инерции, улучшается эффект уменьшения расхода топлива вследствие движения по инерции.
Как проиллюстрировано на фиг. 2-4, первый цилиндр 62 и второй цилиндр 64 размещены на участке механизма 56 передачи мощности между главным цилиндром 52 и цилиндром 54 разъединения. Между первым цилиндром 62 и вторым цилиндром 64, размещены разделительный механизм 76 и электрический актуатор 70 (редуктор 74). В частности, первый цилиндр 62 размещен между главным цилиндром 52 и разделительным механизмом 76, и второй цилиндр 64 размещен между редуктором 74 электрического актуатора 70 и цилиндром 54 разъединения.
При вышеуказанном размещении, в области между главными цилиндрами 52 и цилиндрами 54 разъединения, причем область обведена пунктирной линией на фиг. 2, составляющие элементы, такие как первый цилиндр 62, разделительный механизм 76, электрический актуатор 70, второй цилиндр 64, нижеописанный электронный модуль 100 управления, датчик 102 хода, датчик 104 вращения и датчик 105 давления масла, могут быть сконструированы в качестве одного сборочного узла. Здесь, в существующем транспортном средстве, главный цилиндр 52 и цилиндр 54 разъединения соединяются через масляный канал, и в силу этого затруднительно изменять позиции размещения цилиндров вследствие конструктивных ограничений. Тем не менее, поскольку вышеуказанные составляющие элементы сконструированы в качестве одного сборочного узла, можно изменять конструктивное решение посредством предоставления сборочного узла между главным цилиндром 52 и цилиндром 54 разъединения. Следовательно, поскольку вышеуказанная конфигурация может реализовываться с незначительным изменением относительно существующего транспортного средства, достигается повышенная универсальность. Хотя первый цилиндр 62 и второй цилиндр 64 включены в гидравлическую схему, регулирование площади приема давления первого цилиндра 62 и второго цилиндра 64 позволяет уменьшать поджимающую силу, которая должна формироваться из электрического актуатора 70, относительно силы Fft нажатия педали 50 сцепления. Как результат, электрический актуатор 70 (главным образом электромотор 72) может уменьшаться по размерам, и в силу этого может уменьшаться потребление электрической мощности электромотора 72.
Электронный модуль 100 управления управляет состоянием приведения в действие электрического актуатора 70. Например, электронный модуль 100 управления выполнен с возможностью включать в себя так называемый микрокомпьютер, включающий в себя CPU, RAM, ROM и интерфейс ввода-вывода. CPU управляет состоянием приведения в действие электрического актуатора 70 посредством выполнения обработки сигналов в соответствии с программами, предварительно сохраненными в ROM, при одновременном использовании функции временного хранения RAM.
Электронный модуль 100 управления принимает различные сигналы. Сигналы включают в себя сигнал, указывающий местоположение Ls хода поршня 62b в первом цилиндре 62, которое соответствует местоположению Lpd хода педали для педали 50 сцепления, причем местоположение Ls хода определяется посредством датчика 102 хода, и сигнал, указывающий позицию θm вращения электромотора 72, связанную с рабочим состоянием сцепления 16, причем позиция θm вращения определяется посредством датчика 104 вращения. Сигналы также включают в себя сигнал, указывающий гидравлическое давление Poil в первом масляном канале 66, причем гидравлическое давление Poil определяется посредством датчика 105 давления масла, сигнал, указывающий рабочую величину θacc нажатия педали акселератора, определенную посредством датчика рабочей величины нажатия педали акселератора 106, сигнал, указывающий присутствие или отсутствие Bon операции нажатия педали тормоза, определенной посредством тормозного переключателя 108, и сигнал, указывающий скорость V транспортного средства, определенную посредством датчика 110 скорости транспортного средства. Электронный модуль 100 управления выводит сигнал Sm приведения в действие электромотора 72.
Фиг. 5 является функциональной блок-схемой для описания функции управления электронным модулем 100 управления. Электронный модуль 100 управления функционально включает в себя секцию 120 управления актуатором, которая функционирует в качестве средства управления актуатором, секцию 122 определения анормальностей системы, которая функционирует в качестве средства определения анормальностей системы, секцию 124 определения операций с педалями, которая функционирует в качестве средства определения операций с педалями, и секцию 126 определения запросов на автоматическое управление, которая функционирует в качестве средства определения запросов на автоматическое управление.
Секция 120 управления актуатором управляет электрическим актуатором 70 (электромотором 72) в соответствии с условиями движения транспортного средства, чтобы прикладывать рабочую силу для перемещения второго стержня 65b в осевом направлении через редуктор 74. Соответственно, рабочее состояние механизма 56 передачи мощности, т.е. соединенное и разъединенное состояние сцепления 16 управляется.
Секция 120 управления актуатором управляет электрическим актуатором 70 (электромотором 72) на основе каждого результата определения посредством секции 122 определения анормальностей системы, секции 124 определения операций с педалями и секции 126 определения запросов на автоматическое управление, которые выполняются в любое время в ходе работы транспортного средства.
Секция 122 определения анормальностей системы определяет возникновение анормальности системы устройства соединения/разъединения 30. Секция 122 определения анормальностей системы определяет то, что анормальность возникает в системе, в случае если, например, разность Δθ (=|θmst-θm|) между опорным значением θmst позиции θm вращения электромотора 72 на основе местоположения Lpd хода педали для педали 50 сцепления, вычисленным из местоположения Ls хода поршня 62b в первом цилиндре 62, и фактической позицией θm вращения электромотора 72, определенной посредством датчика 104 вращения, превышает предварительно установленное допустимое значение альфа. Допустимое значение альфа задается в качестве порогового значения в диапазоне, в котором работа системы может определяться как нормальная. Поскольку местоположение Lpd хода педали для педали 50 сцепления и местоположение Ls хода поршня 62b первого цилиндра 62 имеют взаимосвязь "один-к-одному", местоположение Lpd хода педали уникально вычисляется из местоположения Ls хода.
Поскольку педаль 50 сцепления и электромотор 72 соединяются механически, позиция θm вращения электромотора 72 относительно местоположения Lpd хода педали определяется уникально. Секция 122 определения анормальностей системы сохраняет позицию θm вращения электромотора 72 относительно местоположения Lpd хода педали в качестве опорного значения θmst и определяет то, превышает или нет разность Δθ между опорным значением θmst и фактически определенной позицией θ вращения допустимое значение альфа. Когда разность Δθ превышает допустимое значение альфа, имеется вероятность того, что анормальность возникает в датчике 102 хода или датчике 104 вращения. Следовательно, секция 122 определения анормальностей системы определяет то, что анормальность возникает в системе устройства соединения/разъединения 30, когда разность Δθ становится равной или выше допустимого значения альфа.
Когда секция 122 определения анормальностей системы определяет то, что анормальность возникает в системе, секция 120 управления актуатором переключает режим работы на отказоустойчивый режим, в котором электрический актуатор 70 является неактивным. Когда электрический актуатор 70 является неактивным, рабочая сила больше не прикладывается из электрического актуатора 70. Следовательно, сила Fft нажатия, необходимая для нажатия педали 50 сцепления, увеличивается. Следовательно, поскольку водитель ощущает дискомфорт вследствие увеличения силы Fft нажатия, водитель может чувствовать анормальность системы. Кроме того, даже когда анормальность возникает в системе, устройство соединения/разъединения 30 может передавать рабочую силу в цилиндр 54 разъединения посредством операции нажатия педали 50 сцепления, поскольку педаль 50 сцепления и сцепление 16 соединяются механически. Это позволяет водителю соединять и разъединять сцепление 16. Следовательно, поскольку операция движения (к примеру, операция движения своим ходом) может продолжаться, даже когда анормальность возникает в системе, повышается надежность устройства соединения/разъединения 30.
Секция 124 определения операций с педалями вычисляет местоположение Lpd хода педали для педали 50 сцепления из местоположения Ls хода поршня 62b в первом цилиндре 62, определенного посредством датчика 102 хода. На основе того, превышает или нет вычисленное местоположение Lpd хода педали нуль, секция 124 определения операций с педалями определяет присутствие или отсутствие операции с педалью 50 сцепления. В настоящем варианте осуществления, местоположение Lpd хода педали задается равным нулю в состоянии, в котором нажатие педали 50 сцепления прекращается.
Когда секция 124 определения операций с педалями определяет то, что педаль 50 сцепления нажимается (операция выполняется), секция 120 управления актуатором управляет электрическим актуатором 70 (электромотором 72) таким образом, чтобы выполнять управление помощью, которое прикладывает к цилиндру 54a разъединения рабочую силу (в дальнейшем вспомогательную силу Fas) в направлении уменьшения силы Fft нажатия педали 50 сцепления, т.е. в направлении расцепления сцепления 16. В частности, секция 120 управления актуатором помогает при нехватке силы нажатия, необходимой для фактической операции нажатия педали сцепления, посредством инструктирования электрическому актуатору 70 формировать вспомогательную силу Fas таким образом, что сила Fft нажатия, сформированная, когда педаль 50 сцепления нажимается, совпадает с целевой силой Fft_tg нажатия педали сцепления, заданной в соответствии с местоположением Lpd хода педали. Ниже описывается управление помощью электрического актуатора 70 посредством секции 120 управления актуатором.
Секция 120 управления актуатором вычисляет силу Fft нажатия педали 50 сцепления посредством умножения гидравлического давления Poil в первом масляном канале 66, определенного посредством датчика 105 давления масла, на площадь S приема давления поршня 52b главного цилиндра 52 (Poil * S).
Секция 120 управления актуатором предварительно сохраняет карту взаимосвязей целевой силы Fft_tg нажатия относительно местоположения Lpd хода педали для педали 50 сцепления. Секция 120 управления актуатором вычисляет целевую силу Fft_tg нажатия посредством применения местоположения Lpd хода педали для педали 50 сцепления к карте взаимосвязей. Карта взаимосвязей, которая получается посредством экспериментов или согласно расчетам заранее, задается равной значениям с учетом удобства использования педали 50 сцепления.
Секция 120 управления актуатором вычисляет разность ΔFft (=Fft-Fft_tg) между силой Fft нажатия педали 50 сцепления на основе гидравлического давления Poil, определенного посредством датчика 105 давления масла, и целевой силой Fft_tg нажатия, полученной из местоположения Lpd хода педали, и вычисляет вспомогательную силу Fas электрического актуатора 70, необходимую для того, чтобы формировать разность ΔFft. Секция 120 управления актуатором также предварительно сохраняет карту взаимосвязей между рабочей силой Fac, прикладываемой (передаваемой) к механизму 56 передачи мощности из электрического актуатора 70, и током Iid индикатора электромотора 72. Секция 120 управления актуатором вычисляет ток Iid индикатора посредством приложения вычисленной вспомогательной силы Fas к рабочей силе Fac на карте взаимосвязей. Когда секция 120 управления актуатором выводит вычисленный ток Iid индикатора в электромотор 72, вспомогательная сила Fas, соответствующая местоположению Lpd хода педали, формируется, и сила Fft нажатия педали 50 сцепления управляется в качестве целевой силы Fft_tg нажатия.
Когда секция 124 определения операций с педалями определяет то, что педаль 50 сцепления не нажимается (операция не выполняется), секция 126 определения запросов на автоматическое управление определяет то, выводится или нет запрос на автоматическое управление сцепления 16 из электрического актуатора 70. В настоящем варианте осуществления, электрический актуатор 70 выводит запрос на автоматическое управление сцепления 16, когда устанавливается состояние движения по инерции для выполнения движения по инерции. Следовательно, секция 126 определения запросов на автоматическое управление определяет то, что запрос на автоматическое управление выводится, когда устанавливается состояние движения по инерции, в котором рабочая величина θacc нажатия педали акселератора равна нулю, и тормозной переключатель Bon находится в отключенном состоянии. Секция 126 определения запросов на автоматическое управление также определяет то, что запрос на автоматическое управление выводится, когда выбирается режим движения (в дальнейшем режим движения без операций с педалями), в котором операция с педалью 50 сцепления водителем является необязательной.
Когда определяется то, что запрос на автоматическое управление выводится, поскольку состояние движения по инерции устанавливается, секция 120 управления актуатором выполняет автоматическое управление соединением и разъединением. Автоматическое управление соединением и разъединением служит для управления электрическим актуатором 70 таким образом, чтобы инструктировать электрическому актуатору 70 формировать рабочую силу в направлении расцепления сцепления 16, и в силу этого перемещения второго стержня 65b к стороне расцепления (к стороне цилиндра 54 разъединения) сцепления 16, чтобы расцеплять сцепление 16.
Когда сцепление 16 расцепляется во время движения по инерции, передача мощности между двигателем 12 и механической трансмиссией 14 с ручным управлением разъединяется, и в силу этого сопротивление движению, прикладываемое к транспортному средству, уменьшается. Как результат, расстояние движения по инерции (и время движения по инерции), в котором является возможным движение по инерции, увеличивается по сравнению с движением по инерции, когда сцепление 16 соединяется. В настоящем варианте осуществления, двигатель 12 остановлен во время движения по инерции в то время, когда сцепление 16 расцепляется. Соответственно, эффект уменьшения расхода топлива улучшается пропорционально увеличенному расстоянию движения по инерции (и времени движения по инерции) в движении по инерции. Такое управление, которое расцепляет сцепление 16 во время движения по инерции, также называется управлением движением накатом.
Здесь, как проиллюстрировано на фиг. 4, в состоянии, в котором электрический актуатор 70 расцепляет сцепление 16, второй стержень 65b второго цилиндра 64 и второй элемент 80 перемещаются в сторону цилиндра 54 разъединения. В это время, второй элемент 80 перемещается в сторону, дистанцированную от первого элемента 78 в разделительном механизме 76. Между тем, механизм 82 удержания позиции педали удерживает первый элемент 78 в позиции прекращения нажатия педали 50 сцепления. Следовательно, даже в случае, если электрический актуатор 70 расцепляет сцепление 16, педаль 50 сцепления удерживается в позиции прекращения нажатия, поскольку первый элемент 78 и второй элемент 80 разделяются в разделительном механизме 76. Это позволяет предотвращать изменение местоположения Lpd хода педали для педали 50 сцепления, вызываемое посредством работы электрического актуатора 70.
Когда педаль 50 сцепления нажимается во время автоматического управления соединением и разъединением сцепления 16 посредством электрического актуатора 70, сила Fft нажатия педали 50 сцепления снижается по сравнению со случаем, в котором разделительный механизм 76 соединяется. Как следствие, ощущение во время переходной ступени нажатия педали 50 сцепления изменяется, что позволяет водителю чувствовать выполнение операции прерывания во время автоматического управления соединением и разъединением сцепления 16.
Когда состояние движения по инерции не устанавливается вследствие таких причин, как нажатие педали акселератора во время автоматического управления соединением и разъединением сцепления 16, выполняемого посредством электрического актуатора 70, секция 120 управления актуатором управляет электрическим актуатором 70 таким образом, чтобы соединять сцепление 16, и завершает автоматическое управление соединением и разъединением.
Когда определяется то, что запрос на автоматическое управление выводится, поскольку режим движения без операций с педалями выбирается, секция 120 управления актуатором управляет электрическим актуатором 70 таким образом, чтобы выполнять автоматическое управление соединением и разъединением, которое надлежащим образом соединяет и разъединяет сцепление 16.
Например, когда режим движения без операций с педалями выбирается, и педаль акселератора нажимается во время трогания с места транспортного средства, секция 120 управления актуатором управляет электрическим актуатором 70 таким образом, чтобы соединять сцепление 16 с предварительно установленной скоростью зацепления. Когда педаль тормоза нажимается во время остановки транспортного средства, так что скорость V транспортного средства становится равной или ниже порогового значения, при котором транспортное средство предположительно должно останавливаться, секция 120 управления актуатором предотвращает выключение двигателя посредством управления электрическим актуатором 70 таким образом, чтобы расцеплять сцепление 16. Когда выбор режима движения без операций с педалями отменен, автоматическое управление соединением и разъединением завершается и переключается на управление, предусматривающее операцию с педалью 50 сцепления.
Когда внезапная операция прекращения нажатия педали 50 сцепления выполняется во время трогания с места транспортного средства и во время переключения передач, секция 120 управления актуатором управляет электрическим актуатором 70 таким образом, чтобы предотвращать внезапное зацепление сцепления 16 и в силу этого подавлять отказ двигателя и толчок от переключения передач.
Фиг. 6 является блок-схемой последовательности операций способа для описания основной части операции управления электронного модуля 100 управления, причем основная часть представляет собой операцию управления устройства соединения/разъединения 30 в ходе движения. Блок-схема последовательности операций способа многократно выполняется в ходе движения транспортного средства.
Во-первых, на этапе ST1 (в дальнейшем термин "этап" опускается), соответствующем функции управления секцией 120 управления актуатором, секция 120 управления актуатором определяет местоположение Lpd хода педали для педали 50 сцепления на основе местоположения Ls хода поршня 62b в первом цилиндре 62, определенного посредством датчика 102 хода.
Затем, на этапе ST2, соответствующем функции управления секцией 122 определения анормальностей системы, секция 122 определения анормальностей системы определяет то, возникает или нет анормальность в системе устройства соединения/разъединения 30. Когда секция 122 определения анормальностей системы не определяет анормальность системы, отрицательное определение выполняется на этапе ST2, и обработка переходит к этапу ST3. Когда секция 122 определения анормальностей системы определяет анормальность системы, положительное определение выполняется на этапе ST2, и обработка переходит к этапу ST7.
На этапе ST7, соответствующем функции управления секцией 120 управления актуатором, электрический актуатор 70 (электромотор 72) становится неактивным в связи с определением анормальности системы, так что рабочая сила (вспомогательная сила Fas) больше не прикладывается из электрического актуатора 70. Как результат, по мере того, как сила Fft нажатия, необходимая для операции с педалью 50 сцепления, увеличивается, водитель ощущает дискомфорт и в силу этого чувствует возникновение анормальности. Даже когда электрический актуатор 70 становится неактивным, сцепление 16 по-прежнему может соединяться и разъединяться водителем, нажимающим педаль 50 сцепления. Следовательно, движение транспортного средства может продолжаться.
На этапе ST3, соответствующем функции управления секцией 124 определения операций с педалями, секция 124 определения операций с педалями определяет присутствие или отсутствие операции с педалью 50 сцепления. Когда секция 124 определения операций с педалями определяет операцию с педалью 50 сцепления (операция выполняется), положительное определение выполняется на этапе ST3, и обработка переходит к этапу ST4. Когда секция 124 определения операций с педалями определяет то, что водитель не осуществляет операцию с педалью 50 сцепления (водитель не нажимает педаль 50 сцепления) (операция не выполняется), отрицательное определение выполняется на этапе ST3, и обработка переходит к этапу ST5.
На этапе ST4, соответствующем функции управления секцией 120 управления актуатором, секция 120 управления актуатором выполняет управление помощью, которое инструктирует электрическому актуатору 70 формировать вспомогательную силу Fas в соответствии с местоположением Lpd хода педали для педали сцепления.
На этапе ST5, соответствующем функции управления секцией 126 определения запросов на автоматическое управление, секция 126 определения запросов на автоматическое управление определяет то, выводится или нет запрос на автоматическое управление сцепления 16. Когда запрос на автоматическое управление не выводится, отрицательное определение выполняется на этапе ST5, и настоящая процедура завершается. Когда запрос на автоматическое управление выводится, положительное определение выполняется на этапе ST5, и обработка переходит к этапу ST6.
На этапе ST6, соответствующем функции управления секцией 120 управления актуатором, электрический актуатор 70 выполняет автоматическое управление соединением и разъединением сцепления 16. Здесь, когда электрический актуатор 70 расцепляет сцепление 16, разделительный механизм 76 разделяет первый элемент 78 и второй элемент 80, в результате чего педаль 50 сцепления и сцепление 16 разъединяются. Следовательно, даже когда сцепление 16 расцепляется, местоположение Lpd хода педали для педали 50 сцепления не изменяется в сочетании с расцеплением сцепления 16. Это позволяет исключать дискомфорт, вызываемый у водителя.
Как описано выше, согласно настоящему варианту осуществления, разделительный механизм 76 предоставляется на механизме 56 передачи мощности. Соответственно, разделительный механизм 76 разделяет педаль 50 сцепления и цилиндр 54 разъединения, когда электрический актуатор 70 прикладывает рабочую силу к цилиндру 54a разъединения в то время, когда педаль 50 сцепления не нажимается. Следовательно, можно предотвращать ситуацию, когда местоположение Lpd хода педали для педали 50 сцепления изменяется, хотя водитель не нажимает педаль 50 сцепления.
Согласно настоящему варианту осуществления, когда водитель нажимает педаль 50 сцепления, электрический актуатор 70 прикладывает к цилиндру 54a разъединения вспомогательную силу Fas (рабочую силу) в направлении уменьшения силы Fft нажатия педали 50 сцепления. Следовательно, может уменьшаться сила Fft нажатия, необходимая для водителя, чтобы нажимать педаль 50 сцепления. Когда состояние движения по инерции устанавливается в то время, когда водитель не нажимает педаль 50 сцепления, электрический актуатор 70 расцепляет сцепление 16. Соответственно, по мере того, как сопротивление движению, прикладываемое к транспортному средству, уменьшается, и расстояние движения по инерции становится большим, может улучшаться эффект уменьшения расхода топлива.
Согласно настоящему варианту осуществления, когда электрический актуатор 70 перемещает второй элемент 80 в сторону, дистанцированную от первого элемента 78, механизм 82 удержания позиции педали удерживает первый элемент 78 в позиции, в которой нажатие педали 50 сцепления прекращается. Следовательно, предотвращается изменение местоположения Lpd хода педали для педали 50 сцепления, связанное с работой электрического актуатора 70.
Далее приводится описание другого варианта осуществления настоящего изобретения. В нижеприведенном описании, составляющие элементы, идентичные составляющим элементам в вышеуказанном варианте осуществления, обозначены посредством идентичных ссылок с номерами, так что их описание опускается.
Фиг. 7 иллюстрирует упрощенную конструкцию устройства соединения/разъединения 150, которое соединяет и разъединяет сцепление 16, соответствующую другому варианту осуществления настоящего изобретения. Поскольку сцепление 16 имеет конструкцию, идентичную конструкции вышеуказанного варианта осуществления, сцепление 16 обозначено посредством идентичной ссылки с номером, так что ее описание опускается. Устройство соединения/разъединения 150 отличается от устройства соединения/разъединения 30 вышеуказанного варианта осуществления в том аспекте, что первый цилиндр 62 и второй цилиндр 64 не предоставляются. В дальнейшем в этом документе, приводится главным образом описание отличия от устройства соединения/разъединения 30 в вышеуказанном варианте осуществления.
Устройство соединения/разъединения 150 выполнено с возможностью включать в себя педаль 50 сцепления, цилиндр 54 разъединения, механизм 152 передачи мощности, который передает силу нажатия педали 50 сцепления в качестве рабочей силы для цилиндра 54 разъединения, и выжимную вилку 58.
Механизм 152 передачи мощности функционально соединяется между педалью 50 сцепления и цилиндром 54 разъединения. Механизм 152 передачи мощности выполнен с возможностью включать в себя соединительный стержень 154, который механически соединяет педаль 50 сцепления и главный цилиндр 52, главный цилиндр 52, который формирует гидравлическое давление, соответствующее нажатию педали 50 сцепления, и масляный канал 158, который соединяет камеру 52c нагнетания гидравлического давления, сформированную в главном цилиндре 52, и камеру 54c нагнетания гидравлического давления, сформированную в цилиндре 54 разъединения.
Соединительный стержень 154 состоит из первого стержня 154a и второго стержня 154b, которые размещены последовательно. Разделительный механизм 160 предоставляется между первым стержнем 154a и вторым стержнем 154b. Разделительный механизм 160 включает в себя первый элемент 162, соединенный со стороной первого стержня 154a, второй элемент 164, соединенный со стороной второго стержня 154b, и механизм 166 удержания позиции педали, соединенный с первым элементом 162. Поскольку разделительный механизм 160 по существу является идентичным по конструкции и работе вышеуказанному разделительному механизму 76, его описание опускается.
Выше второго стержня 154b, электрический актуатор 168 предоставляется таким образом, чтобы обеспечивать возможность передачи мощности во второй стержень 154b. Электрический актуатор 168 состоит из электромотора 170 и редуктора 172, соединенных со вторым стержнем 154b, с тем чтобы обеспечивать возможность передачи мощности. Поскольку электрический актуатор 168 по существу является аналогичным по конструкции и работе электрическому актуатору 70 в вышеуказанном варианте осуществления, его описание опускается.
В настоящем варианте осуществления, разделительный механизм 160 и электрический актуатор 168 (редуктор 74) размещены между педалью 50 сцепления и главным цилиндром 52, и главный цилиндр 52 и цилиндр 54 разъединения соединяются через масляный канал 158. Таким образом, разделительный механизм 160 и электрический актуатор 168 (редуктор 74) размещены между педалью 50 сцепления и главным цилиндром 52, что позволяет исключать первый цилиндр 62 и второй цилиндр 64 в вышеуказанном варианте осуществления. Соответственно, по сравнению с вышеуказанным устройством соединения/разъединения 30, устройство соединения/разъединения 150 может упрощаться, и увеличение подсчитанного числа частей может подавляться.
Поскольку подробности управления устройством соединения/разъединения 150 по существу являются идентичными подробностям в вышеуказанном варианте осуществления, их описание опускается. В настоящем варианте осуществления, датчик 174 хода, присоединенный к педали 50 сцепления, непосредственно определяет местоположение Lpd хода педали. Датчик 176 хода определяет местоположение Lrl хода цилиндра 54 разъединения в качестве параметра, связанного с соединенным и разъединенным состоянием сцепления 16.
Также в устройстве соединения/разъединения 150, сконфигурированном так, как описано выше, может получаться преимущество, идентичное преимуществу в вышеуказанном варианте осуществления. В частности, когда электрический актуатор 168 расцепляет сцепление 16, электрический актуатор 168 перемещает второй стержень 154b в сторону цилиндра 54 разъединения. В это время, в разделительном механизме 160, первый элемент 162 и второй элемент 164 разделяются, и механизм 166 удержания позиции педали удерживает первый элемент 162 в позиции прекращения нажатия педали 50 сцепления. Следовательно, даже когда сцепление 16 расцеплено, педаль 50 сцепления удерживается в позиции прекращения нажатия. Следовательно, можно предотвращать дискомфорт, вызываемый посредством изменения местоположения Lpd хода педали для педали 50 сцепления во время автоматического управления сцепления 16.
Когда анормальность возникает в системе устройства соединения/разъединения 150, сцепление 16 может расцепляться посредством операции нажатия педали 50 сцепления, поскольку педаль 50 сцепления и цилиндр 54 разъединения механически соединяются. В этом случае, поскольку электрический актуатор 168 больше не прикладывает вспомогательную силу Fas, сила Fft нажатия педали 50 сцепления увеличивается. Это вызывает у водителя чувство дискомфорта, так что водитель может чувствовать возникновение анормальности. Кроме того, в устройстве соединения/разъединения 150, первый цилиндр 62 и второй цилиндр 64, предоставленные в вышеуказанном устройстве соединения/разъединения 30, становятся необязательными. Соответственно, устройство соединения/разъединения 150 может упрощаться, и увеличение подсчитанного числа частей может подавляться.
Хотя варианты осуществления настоящего изобретения подробно описываются на основе чертежей, настоящее изобретение также применяется к другим режимам.
Например, в вышеуказанных вариантах осуществления, местоположение Lpd хода педали для педали 50 сцепления вычисляется из местоположения Ls хода поршня 62b первого цилиндра 62. Тем не менее, местоположение Ls хода может представлять собой любой параметр при условии, что местоположение Lpd хода педали может вычисляться на основе этого. Например, местоположение Lpd хода педали также может вычисляться посредством предоставления датчика, который определяет местоположение хода соединительного стержня 60, либо может предоставляться датчик, который непосредственно определяет местоположение Lpd хода педали.
В вышеуказанном варианте осуществления, предоставляется датчик 104 вращения, который определяет позицию θm вращения электромотора 72. Тем не менее, датчик 104 вращения может заменяться, например, датчиком, который определяет местоположение хода цилиндра 54 разъединения или местоположение хода второго цилиндра 64. Вкратце, параметры, связанные с соединенным и разъединенным состоянием (рабочим состоянием) сцепления 16, могут надлежащим образом изменяться.
В вышеуказанных вариантах осуществления, рабочая величина цилиндра 54 разъединения передается в выжимной подшипник 46 через выжимную вилку 58. Тем не менее, настоящее изобретение является применимым к конфигурации, в которой концентрический второстепенный цилиндр предоставляется рядом с сцеплением 16.
Хотя двигатель 12 остановлен во время движения по инерции в вышеуказанных вариантах осуществления, двигатель 12 может выполнять работу в режиме холостого хода во время движения по инерции.
Хотя редуктор 74 состоит из шарикового винта в вышеуказанных вариантах осуществления, надлежащим образом может применяться любой механизм, который преобразует вращательное перемещение в поступательное перемещение, такой как реечная передача.
Раскрытые варианты осуществления являются просто примерами, и настоящее изобретение может выполняться в режимах, к которым различные компоновки и модификации применяются на основе сведений специалистов в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СОЕДИНИТЕЛЬНОЕ И РАЗЪЕДИНИТЕЛЬНОЕ УСТРОЙСТВО МУФТЫ СЦЕПЛЕНИЯ | 2019 |
|
RU2711521C1 |
| УСТРОЙСТВО ЗАЦЕПЛЕНИЯ/РАСЦЕПЛЕНИЯ МУФТЫ СЦЕПЛЕНИЯ | 2019 |
|
RU2713123C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ | 2017 |
|
RU2667797C1 |
| СПОСОБ УПРАВЛЕНИЯ ОСТАНОВОМ И ПУСКОМ ДВИГАТЕЛЯ И МОТОРНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2707180C2 |
| Устройство управления двухпоточной муфтой сцепления транспортного средства | 2015 |
|
RU2622438C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2587317C1 |
| ОБОРУДОВАНИЕ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА В АВАРИЙНОМ РЕЖИМЕ | 2019 |
|
RU2706754C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ВКЛЮЧЕНИЕМ СЦЕПЛЕНИЯ | 2012 |
|
RU2599860C2 |
| СИСТЕМА ДЛЯ ПРЕДОТВРАЩЕНИЯ ПОВРЕЖДЕНИЯ КОРОБКИ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА, СНАБЖЕННОГО СИСТЕМОЙ КОРОБКИ ПЕРЕДАЧ, ПРИВОДИМОЙ В ДЕЙСТВИЕ СЕРВОПРИВОДОМ СЦЕПЛЕНИЯ И СЕРВОПРИВОДОМ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2014 |
|
RU2638408C2 |
| Устройство для управления сцеплением транспортного средства | 1990 |
|
SU1752591A1 |



Устройство соединения/разъединения сцепления включает в себя педаль сцепления, цилиндр сцепления, механизм передачи мощности, электрический актуатор и разделительный механизм. Кроме того, в его состав входит подвижный выжимной подшипник, размещенный на внешней периферийной стороне входного передаточного вала, и выжимная вилка. Механизм передачи мощности выполнен с возможностью передавать силу нажатия педали сцепления в качестве рабочей силы для цилиндра сцепления. Электрический актуатор соединяется с механизмом передачи мощности, с тем чтобы обеспечивать возможность передачи мощности. Электрический актуатор выполнен с возможностью прикладывать рабочую силу к цилиндру сцепления через механизм передачи мощности. Разделительный механизм предоставляется на участке тракта передачи мощности в механизме передачи мощности, причем участок находится между педалью сцепления и электрическим актуатором. Достигается упрощение конструкции. 5 з.п. ф-лы, 7 ил.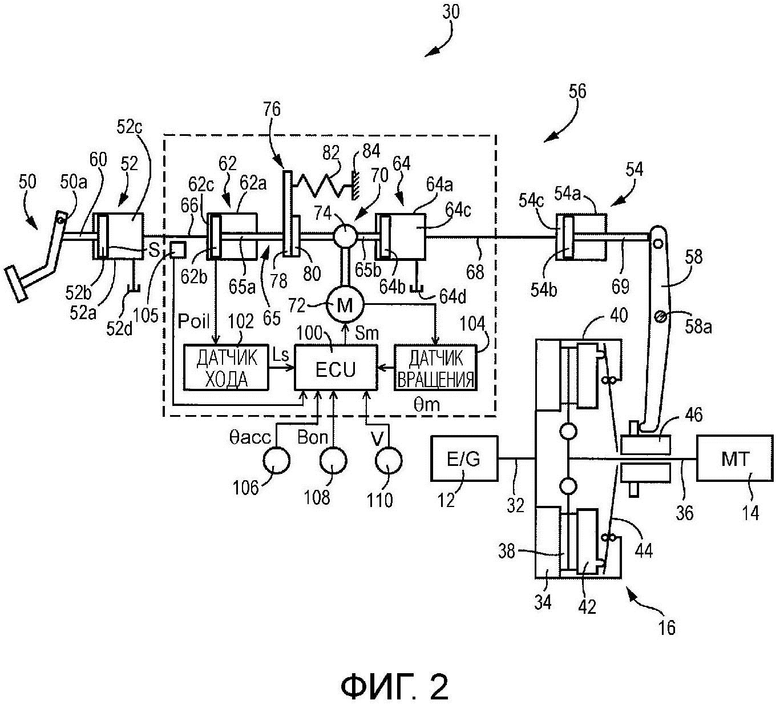
1. Устройство (30) соединения/разъединения для сцепления транспортного средства, содержащее:
педаль (50) сцепления, выполненную с возможностью управления водителем;
цилиндр (54) сцепления;
механизм (56) передачи мощности, выполненный с возможностью передачи силы нажатия педали (50) сцепления в качестве рабочей силы для цилиндра (54) сцепления, причем механизм (56) передачи мощности включает в себя электрический актуатор (70), чтобы обеспечивать передачу мощности, при этом электрический актуатор (70) выполнен с возможностью приложения рабочей силы к цилиндру (54) сцепления, и разделительный механизм (76), обеспеченный на участке тракта передачи мощности, находящемся между педалью (50) сцепления и электрическим актуатором (70),
выжимной подшипник (46), размещенный на внешней периферийной стороне входного передаточного вала (36) и выполненный с возможностью перемещения относительно входного передаточного вала (36) в его осевом направлении, и
выжимную вилку (58), выполненную с возможностью передачи рабочей величины цилиндра (54) сцепления на выжимной подшипник (46).
2. Устройство по п. 1, дополнительно содержащее электронный модуль (100) управления, выполненный с возможностью управления электрическим актуатором (70) таким образом, чтобы уменьшать силу нажатия, необходимую для нажатия педали (50) сцепления, и прикладывать рабочую силу к цилиндру (54) сцепления в направлении расцепления сцепления при нажатии водителем на педаль (50) сцепления.
3. Устройство по п. 1, дополнительно содержащее электронный модуль (100) управления, выполненный с возможностью управления электрическим актуатором (70) таким образом, чтобы расцеплять сцепление, когда водитель не нажимает педаль (50) сцепления.
4. Устройство по любому из пп. 1-3, в котором механизм (56) передачи мощности включает в себя главный цилиндр (52) сцепления, первый цилиндр (62) и второй цилиндр (64), при этом главный цилиндр (52) сцепления размещен между педалью (50) сцепления и разделительным механизмом (76), первый цилиндр (62) и второй цилиндр (64) размещены между главным цилиндром (52) сцепления и цилиндром (54) сцепления, и разделительный механизм (76) и электрический актуатор (70) размещены между первым цилиндром (62) и вторым цилиндром (64).
5. Устройство по любому из пп. 1-3, в котором механизм (56) передачи мощности включает в себя главный цилиндр (52) сцепления, соединенный с цилиндром (54) сцепления через масляный канал (66), и разделительный механизм (76) и электрический актуатор (70) размещены между педалью (50) сцепления и главным цилиндром (52) сцепления.
6. Устройство по любому из пп. 1-3, в котором разделительный механизм (76) включает в себя первый элемент (78), второй элемент (80) и механизм (82) удержания позиции педали, причем первый элемент (78) выполнен с возможностью взаимного сцепления с педалью (50) сцепления, второй элемент (80) выполнен с возможностью взаимного сцепления с цилиндром (54) сцепления и вхождения в контакт с первым элементом (78) при нажатии на педаль (50) сцепления, и механизм (82) удержания позиции педали выполнен с возможностью формирования удерживающей силы, чтобы удерживать первый элемент (78) в позиции, в которой прекращается нажатие педали сцепления.
| JP 2006336783 A, 14.12.2006 | |||
| DE 3545500 A, 02.07.1987 | |||
| Устройство управления сцеплением | 1987 |
|
SU1541085A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ АВТОМОБИЛЯ | 2005 |
|
RU2291065C1 |

