Предпосылки создания изобретения
1. Область техники
[0001] Изобретение относится к устройству управления сцеплением, которое управляет работой сцепляющего устройства в тракте передачи мощности между двигателем и коробкой передач в автомобиле, а также к способу управления устройством управления сцеплением.
2. Описание предшествующего уровня техники
[0002] Традиционным, как показано в японской патентной заявке №2012-112499 (JP 2012-112499 А), является известное устройство управления сцеплением, которое управляет сцепляющим устройством в тракте передачи модности между двигателем (двигатель внутреннего сгорания) и коробкой передач с использованием гидравлического давления рабочего масла, подаваемого на сцепляющее устройство.
[0003] Устройство управления сцеплением содержит привод сцепления с гидравлическим цилиндром. Степень нажатия водителем (степень нажатия) педали сцепления определяется датчиком хода педали сцепления. Управление приводом сцепления осуществляется в соответствии с выходным сигналом от датчика хода педали сцепления. Гидравлическое давление, подаваемое гидравлическим цилиндром на сцепляющее устройство, регулируется посредством управления приводом сцепления. Таким образом, состояние зацепления сцепляющего устройства обеспечивается соразмерно степени нажатия педали сцепления. Систему сцепления, содержащую такое устройство управления сцеплением, обычно называют системой сцепления с электронным управлением.
Сущность изобретения
[0004] Однако в существующей системе сцепления с электронным управлением, в случае возникновения неисправности в приводе сцепления, датчике хода педали сцепления и т.п., и возникновения нарушения в работе привода сцепления, сцепляющее устройство не способно функционировать в соответствии со степенью нажатия педали сцепления.
[0005] В изобретении предложено устройство управления сцеплением, которое позволяет сцепляющему устройству работать в соответствии со степенью нажатия педали сцепления даже в случае нарушения работы привода сцепления.
[0006] В качестве одного из аспектов изобретения предложено устройство управления сцеплением. Устройство управления сцеплением выполнено с возможностью управления сцепляющим устройством между состоянием зацепления и состоянием расцепления посредством регулирования давления жидкости внутри жидкостной напорной камеры сцепляющего устройства. Сцепляющее устройство расположено на пути передачи мощности между двигателем и коробкой передач. Устройство управления сцеплением содержит: привод сцепления, педаль сцепления, первый канал, второй канал, переключающий механизм и электронный блок управления. Педаль сцепления выполнена с возможностью ее нажатия водителем. Первый канал выполнен с возможностью регулирования давления жидкости путем направления течения рабочей жидкости в жидкостную напорную камеру или из жидкостной напорной камеры за счет работы привода сцепления. Второй канал выполнен с возможностью регулирования давления жидкости путем направления течения рабочей жидкости в жидкостную напорную камеру или из жидкостной напорной камеры за счет управляющего усилия, создаваемого нажатием педали сцепления. Переключающий механизм выполнен с возможностью переключения канала рабочей жидкости, сообщающегося с жидкостной напорной камерой, между первым каналом и вторым каналом. Электронный блок управления, выполнен с возможностью такого управления переключающим механизмом, чтобы переключать канал рабочей жидкости, сообщающийся с жидкостной напорной камерой, с первого канала на второй канал, когда электронный блок управления определяет наличие нарушения в работе привода сцепления. В качестве другого из аспектов изобретения предложен способ управления для устройства управления сцеплением, предназначенный для управления сцепляющим устройством между состоянием зацепления и состоянием расцепления посредством регулирования давления жидкости внутри жидкостной напорной камеры сцепляющего устройства, при этом сцепляющее устройство расположено на пути передачи мощности между двигателем и коробкой передач. Устройство управления сцеплением содержит: привод сцепления, педаль сцепления, выполненную с возможностью ее нажатия водителем, первый канал, выполненный с возможностью регулирования давления жидкости путем направления течения рабочей жидкости в жидкостную напорную камеру или из жидкостной напорной камеры за счет работы привода сцепления, второй канал, выполненный с возможностью регулирования давления жидкости путем направления течения рабочей жидкости в жидкостную напорную камеру или из жидкостной напорной камеры за счет управляющего усилия, создаваемого нажатием педали сцепления, переключающий механизм, выполненный с возможностью переключения канала рабочей жидкости, сообщающегося с жидкостной напорной камерой, между первым каналом и вторым каналом, и электронный блок управления. Способ управления включает в себя выполнение электронным блоком управления такого управления переключающим механизмом, чтобы переключать канал рабочей жидкости, сообщающийся с жидкостной напорной камерой, с первого канала на второй канал, когда электронный блок управления определяет наличие нарушения в работе привода сцепления.
[0007] С такой конфигурацией, когда определено возникновение нарушения в работе привода сцепления, переключающий механизм управляется так, чтобы переключать канал рабочей жидкости, сообщающийся с жидкостной напорной камерой, с первого канала на второй канал. Таким образом, давление жидкости, получаемое от управляющего усилия нажатия водителем педали сцепления, может быть передано в жидкостную напорную камеру сцепляющего устройства так, чтобы сцепляющее устройство стало работоспособным. Т.е., даже когда существует нарушение в работе привода сцепления, сцепляющее устройство способно работать в ответ на степень нажатия педали сцепления.
[0008] В вышеуказанном аспекте устройство управления сцеплением может дополнительно содержать механизм создания реакции и третий канал. Механизм создания реакции может быть выполнен с возможностью создания реактивного усилия, действующего против управляющего усилия, на педаль сцепления с использованием потока рабочей жидкости. Третий канал, может быть выполнен с возможностью направления течения рабочей жидкости в механизм создания реакции или из механизма создания реакции с использованием управляющего усилия на педаль сцепления. Переключающий механизм может быть выполнен с возможностью переключения третьего канала между сообщающимся состоянием и прерванным состоянием. Электронный блок управления может быть выполнен с возможностью такого управления переключающим механизмом, чтобы переключать третий канал из сообщающегося состояния в прерванное состояние, когда электронный блок управления определяет наличие нарушения в работе привода сцепления.
[0009] С такой конфигурацией, когда определено отсутствие нарушения в работе привода сцепления, третий канал переключен переключающим механизмом в сообщающееся состояние. Таким образом, при нажатии водителем педали сцепления, когда сцепляющее устройство работает через первый канал, разрешено создание механизмом создания реакции реактивного усилия против управляющего усилия. В связи с этим, водитель нажимает педаль сцепления с получением реактивного усилия от механизма создания реакции, поэтому водитель нажимает педаль сцепления без возникновения ощущения непривычной работы педали сцепления. С другой стороны, когда определено наличие нарушения в работе привода сцепления, третий канал переключен в прерванное состояние переключающим механизмом. Т.е. сцепляющее устройство переводится в такое состояние, чтобы быть управляемым через второй канал, и затем происходит прерывание канала рабочей жидкости между педалью сцепления и механизмом создания реакции. Таким образом, реактивное усилие от механизма создания реакции не воздействует на педаль сцепления, поэтому управляющее усилие, которое водитель создает нажатием педали сцепления, может быть задано как минимально необходимое усилие для работы сцепляющего устройства, чтобы в результате не допустить ухудшения работоспособности педали сцепления.
[0010] В вышеуказанном аспекте переключающий механизм может содержать первое отверстие, второе отверстие, третье отверстие и четвертое отверстие. Первое отверстие может быть соединено с приводом сцепления через канал для рабочей жидкости. Второе отверстие может быть соединено с педалью сцепления через канал для рабочей жидкости. Третье отверстие может быть соединено механизмом создания реакции через канал для рабочей жидкости. Четвертое отверстие может быть соединено с жидкостной напорной камерой сцепляющего устройства через канал для рабочей жидкости. Электронный блок управления может быть выполнен с возможностью сообщать четвертое отверстие с первым отверстием, и сообщать второе отверстие с третьим отверстием, когда электронный блок управления определяет отсутствие нарушения в работе привода сцепления. Электронный блок управления может быть выполнен с возможностью сообщать четвертое отверстие со вторым отверстием и прерывать сообщение каждого из первого и второго отверстия с другими отверстиями, когда электронный блок управления определяет наличие нарушения в работе привода сцепления.
[0011] С такой конфигурацией, когда определено отсутствие нарушения в работе привода сцепления, четвертое отверстие и первое отверстие переключающего механизма сообщаются друг с другом, поэтому жидкостная напорная камера сцепляющего устройства и привод сцепления сообщаются друг с другом через канал для рабочей жидкости. Когда второе отверстие и третье отверстие сообщаются друг с другом, педаль сцепления и механизм создания реакции сообщаются друг с другом через канал для рабочей жидкости. Таким образом, в соответствии с вышеуказанным раскрытием, возможно управление сцепляющим устройством через управление приводом сцепления (возможно управление сцепляющим устройством, используя первый канал), и возможно получение реактивного усилия против управляющего усилия, которое водитель создает нажатием педали сцепления, от механизма создания реакции. С другой стороны, когда определено нарушение в работе привода сцепления, четвертое отверстие и второе отверстие переключающего механизма сообщаются друг с другом, поэтому жидкостная напорная камера сцепляющего устройства и педаль сцепления сообщаются друг с другом через канал для рабочей жидкости. Таким образом, посредством подачи гидравлического давления, получаемого от управляющего усилия, которое водитель создает нажатием педаль сцепления, в жидкостную напорную камеру сцепляющего устройства, срабатывает сцепляющее устройство (сцепляющее устройство становится работоспособным с использованием второго канала). Поскольку сообщение каждого из первого и третьего отверстия с любыми другими отверстиями прервано, то канал, соединенный с приводом сцепления, и канал, соединенный с механизмом создания реакции, становятся прерванными. Таким образом, становится возможным предотвращение неблагоприятного эффекта из-за отказа привода сцепления, и становится возможным предотвращение чрезмерного увеличения требуемого от водителя управляющего усилия на педаль сцепления.
[0012] В вышеуказанном аспекте электронный блок управления может быть выполнен с возможностью расцепления сцепляющего устройства, осуществляя управление приводом сцепления, если удовлетворено заранее заданное условие начала движения накатом, когда движение автомобиля происходит в ситуации, в которой сцепляющее устройство находится в состоянии зацепления, когда сцепляющее устройство управляется при сообщении первого канала с жидкостной напорной камерой. Электронный блок управления может быть выполнен с возможностью такого переключения переключающего механизма, чтобы прерывать сообщение первого канала, когда движение накатом продолжено в течение заранее заданного периода времени после начала движения автомобиля накатом.
[0013] С такой конфигурацией, когда удовлетворено условие начала движения накатом, электронный блок управления расцепляет сцепляющее устройство, используя привод сцепления. Таким образом, начинается движение накатом. После этого, когда движение накатом продолжается в течение заранее заданного периода времени, электронный блок управления прерывает сообщение первого канала. Таким образом, рабочая жидкость оказывается заключенной в канале между переключающим механизмом и жидкостной напорной камерой сцепляющего устройства, и выполняется поддержание давления жидкости в канале. В связи с этим, расцепленное состояние сцепляющего устройства поддерживается без продолжения работы привода сцепления (работа привода сцепления для поддержания давления жидкости, подаваемого в жидкостную напорную камеру сцепляющего устройства), поэтому возможно продолжение движения накатом. В результате, возможно значительное снижение потребления энергии, требуемой для работы привода сцепления.
[0014] В соответствии с этим аспектом изобретения предложены первый канал, регулирующий давление жидкости посредством направления рабочей жидкости в жидкостную напорную камеру или из жидкостной напорной камеры сцепляющего устройства, используя привод сцепления, и второй канал, регулирующий давление жидкости посредством направления рабочей жидкости в жидкостную напорную камеру или из жидкостной напорной камеры сцепляющего устройства, используя управляющее усилие на педаль сцепления. Когда определено возникновение нарушения в работе привода сцепления, канал сообщения рабочей жидкости с жидкостной напорной камерой переключается с первого канала на второй канал. В связи с этим, даже в случае нарушения возможна работа сцепляющего устройства в ответ на степень рабочего нажатия педали сцепления.
Краткое описание чертежей
[0015] Отличительные признаки, преимущества, техническая и промышленная значимость примерных вариантов осуществления настоящего изобретения раскрыты ниже со ссылкой на сопроводительные чертежи. Одинаковые обозначения на чертежах относятся к одинаковым элементам.
ФИГ. 1 - вид, на котором показана схематичная конфигурация силового агрегата и управляющей системы автомобиля в соответствии с вариантом осуществления изобретения;
ФИГ. 2 - вид, на котором показана общая схематичная конфигурация системы сцепления в соответствии с вариантом осуществления изобретения;
ФИГ. 3 - блок-схема, на которой показана конфигурация управляющей системы, связанной с ЭБУ двигателя, и ЭБУ сцепления в соответствии с вариантом осуществления изобретения;
ФИГ. 4 - функциональная схема, на которой показан алгоритм операций переключения переключающего механизма в соответствии с вариантом осуществления изобретения;
ФИГ. 5 - вид, на котором показана общая схематичная конфигурация системы сцепления в соответствии с альтернативным вариантом осуществления изобретения; и
ФИГ. 6 - блок-схема, на которой показана конфигурация управляющей системы, связанной с ЭБУ двигателя, и ЭБУ сцепления в соответствии с альтернативным вариантом осуществления изобретения.
Подробное описание вариантов осуществления
[0016] Далее, вариант осуществления изобретения раскрыт со ссылкой на сопроводительные чертежи. Настоящий вариант осуществления относится к случаю, когда изобретение применено к переднеприводному автомобилю с передним расположением двигателя.
Конфигурация силового агрегата
[0017] ФИГ. 1 представляет собой вид, на котором показана схематичная конфигурация трансмиссии и управляющей системы автомобиля в соответствии с настоящим вариантом осуществления изобретения. Как показано на ФИГ. 1, сцепляющее устройство 2 расположено на тракте передачи мощности между коленчатым валом 11 и коробкой 3 передач (коробка передач с ручным управлением). Коленчатый вал 11 - это выходной вал двигателя 1. Выходная сторона коробки 3 передач соединена с ведущими колесами 43 через дифференциальную передачу 41 и приводные валы 42.
[0018] Двигатель 1 - это двигатель внутреннего сгорания, например бензиновый двигатель. ЭБУ 100 управляет работой двигателя 1.
[0019] ФИГ. 2 представляет собой вид, на котором показана общая схематичная конфигурация системы сцепления. Как показано на ФИГ. 2, сцепляющее устройство 2 содержит сцепляющий механизм 21 и коаксиальный рабочий цилиндр 22 (КРЦ). КРЦ 22 срабатывает в ответ на гидравлическое давление (давление рабочей жидкости в соответствии с аспектом изобретения), подаваемое от гидравлического контура 330 сцепления (описан далее), и приводит в действие сцепляющий механизм 21.
[0020] В частности, сцепляющий механизм 21 содержит диск 23 сцепления, нажимной диск 24 и диафрагменную пружину 25. КРЦ 22 содержит выжимной подшипник 26.
[0021] Диск 23 сцепления установлен с помощью шлицевого соединения на удаленном конце входного вала 31 коробки 3 передач. Диск 23 сцепления расположен напротив маховика 14, закрепленного на хвостовом конце коленчатого вала 11. Нажимной диск 24 расположен между внешним радиальным участком диафрагменной пружины 25 и диском 23 сцепления. Диафрагменная пружина 25 прижимает нажимной диск 24 к диску 23 сцепления в естественном состоянии (состояние, когда на диафрагменную пружину 25 не воздействует внешнее усилие). Таким образом, диафрагменная пружина 25 приводит диск 23 сцепления в нагруженный контакт с маховиком 14. Выжимной подшипник 26 КРЦ 22 расположен напротив внутреннего радиального участка диафрагменной пружины 25.
[0022] Гидравлический контур 330 сцепления соединен с КРЦ 22. КРЦ 22 работает так, что зацепляющий механизм 21 может находиться в состоянии зацепления, расцепления или зацепления с проскальзыванием посредством смещения нажимной пластины 24 сцепляющего механизма 21 в осевом направлении. В частности, привод 8 сцепления (описан далее) функционирует в соответствии с сигналом управления сцеплением от ЭБУ 200 сцепления. В результате, осуществляется управление гидравлическим давлением, подаваемым от гидравлического контура 330 сцепления в гидравлическую камеру (жидкостная напорная камера, не показана) КРЦ 22 (функционирование в случае отсутствия отказа привода 8 сцепления и т.п. (первый рабочий механизм 310 (описан далее))).
[0023] В состоянии, когда отсутствует подача гидравлического давления от гидравлического контура 330 сцепления в КРЦ 22, и выжимной подшипник 26 расположен в отведенном положении, диск 23 сцепления находится в нагруженном контакте с маховиком 14 под воздействием нажимного усилия диафрагменной пружины 25 (состояние зацепления сцепляющего механизма 21; состояние, показанное на ФИГ. 2). В ситуации отсутствия неисправности привода 8 сцепления и т.п. (привод 8 сцепления и т.п. функционирует исправно), когда управляющий сигнал выключения сцепления выдается от ЭБУ 200 сцепления в качестве сигнала управления сцеплением, срабатывает КРЦ 22, и выжимной подшипник 26 нажимает на внутренний радиальный участок диафрагменной пружины 25 под воздействием гидравлического давления, подаваемого от гидравлического контура 330 сцепления в результате работы привода 8 сцепления. Таким образом, диафрагменная пружина 25 отходит назад, а значит, прекращается создание нажимного усилия нажимным диском 24 на диск 23 сцепления. В результате, диск 23 сцепления отсоединяется от маховика 14, и сцепляющий механизм 21 становится расцепленным (сцепляющее устройство 2 расцеплено).
[0024] С другой стороны, когда управляющий сигнал включения сцепления выдается от ЭБУ 200 сцепления в качестве сигнала управления сцеплением, подача гидравлического давления от гидравлического контура 330 сцепления, вызванная работой привода 8 сцепления, прекращается, и КРЦ 22 приводится в действие, чтобы вызвать освобождение выжимного подшипника 26 для его отведения от диафрагменной пружины 25. Таким образом, диафрагменная пружина 25 возвращается в естественное состояние, и нажимное усилие нажимного диска 24 воздействует на диск 23 сцепления. В результате, диск 23 сцепления приводится в нагруженный контакт с маховиком 14, и сцепляющий механизм 21 становится зацепленным (сцепляющее устройство 2 зацеплено).
[0025] Таким образом, система сцепления сконфигурирована как так называемая система сцепления с электронным управлением, в которой привод 8 сцепления работает в соответствии с сигналами управления сцеплением от ЭБУ 200 сцепления, и соответственно происходит переход сцепляющего устройства 2 между состоянием зацепления и состоянием расцепления. Эта система сцепления с электронным управлением способна надлежащим образом зацеплять и расцеплять сцепляющее устройство 2 независимо от нажатия педали 91 сцепления водителем. Например, даже когда рабочая частота вращения, при которой водитель снимает нажатие педали 91 сцепления, является высокой, возможно зацепление сцепляющего устройства 2 без возникновения рывка. Даже когда водитель не нажимает педаль 91 сцепления, сцепляющее устройство 2 может быть расцеплено, так что становится возможным движение автомобиля накатом (описано далее) (движение автомобиля накатом, в котором автомобиль приводится в движение в состоянии, когда передача мощности между двигателем 1 и коробкой 3 передач прервана).
[0026] Режим выдачи сигнала управления сцеплением от ЭБУ 200 сцепления содержит режим, в котором сигнал управления сцеплением выдается в соответствии с нажатием педали 91 сцепления водителем, и режим, в котором сигнал управления сцеплением выдается без нажатия педали 91 сцепления водителем. Т.е. режим выдачи содержит режим, в котором степень нажатия педали 91 сцепления водителем (степень нажатия из состояния, в котором педаль 91 сцепления не задействована (степень нажатия - «0»)) определяется датчиком 201 хода педали сцепления (описан далее), а затем сигнал управления сцеплением выдается от ЭБУ 200 сцепления в соответствии с выходным сигналом датчика 201 хода педали сцепления, и режим, в котором сигнал управления сцеплением выдается от ЭБУ 200 сцепления без нажатия педали 91 сцепления водителем, как при движении накатом. Вышеуказанные операции выполняются, когда отсутствует неисправность привода 8 сцепления и т.п., как указано выше. Далее будут раскрыты компоненты для случая, когда привод 8 сцепления и т.п. неисправен, а также работа в случае сбоя.
[0027] Коробка 3 передач выполнена в виде известной коробки передач с ручным управлением. Коробка 3 передач представляет собой шестеренный передаточный механизм постоянного зацепления с параллельными валами с синхронизирующим механизмом, способный, например, устанавливать шесть положений скорости переднего хода и положение заднего хода. Когда водитель переключает рычаг 6 переключения передач (см. ФИГ. 1), управляющее усилие рычага 6 переключения передач активирует синхронизирующий механизм (не показан) через трос 61 выбора передачи и трос 62 переключения передачи. Таким образом, требуемое положение скорости (одно из шести положений скорости переднего хода и положения заднего хода) устанавливается в коробке 3 передач.
[0028] Коробкой 3 передач может быть коробка передач, в которой управляющее усилие рычага 6 переключения передач передается на синхронизирующий механизм через вилочный вал и вилку переключения. В других случаях коробка 3 передач может быть так называемой автоматизированной ручной коробкой передач. В таком случае управляющая система содержит ЭБУ КПП, а приводы (привод селектора и привод переключения) функционируют так, чтобы требуемое положение скорости устанавливалось в соответствии с управляющим сигналом переключения, выдаваемым от ЭБУ КПП, когда водитель переключает рычаг переключения передач.
[0029] Посредством операций переключения в коробке 3 передач, вращение двигателя 1, передаваемое на коробку 3 передач через сцепляющее устройство 2, может быть изменено в коробке 3 передач по частоте вращения при заранее заданном передаточном отношении, и передано на правое и левое ведущие колеса 43 через дифференциальную передачу 41 и приводные валы 42, в результате чего движется автомобиль.
[0030] Как показано на ФИГ. 2, система сцепления в соответствии с настоящим вариантом осуществления изобретения сконфигурирована так, что сцепляющее устройство 2, привод 8 сцепления, блок 9 педали сцепления и механизм 93 создания реакции соединены друг с другом через гидравлический контур 330 сцепления.
[0031] Гидравлический контур 330 сцепления содержит переключающий механизм 331 как одну из характеристик настоящего варианта осуществления. Гидравлическая камера в КРЦ 22 сцепляющего устройства 2 соединена с переключающим механизмом 331 через гидравлический канал 332 стороны КРЦ. Привод 8 сцепления (более точно, главный цилиндр 84 сцепления привода 8 сцепления (описан далее)) соединен с переключающим механизмом 331 через гидравлический канал 333 стороны привода. Блок 9 педали сцепления (более точно, главный цилиндр 92 сцепления блока 9 педали сцепления (описан далее)) соединен с переключающим механизмом 331 через гидравлический канал 334 стороны педали. Механизм 93 создания реакции соединен с переключающим механизмом 331 через гидравлический канал 335 стороны создания реакции.
[0032] Переключающий механизм 331 сконфигурирован так, что масляные каналы выполнены внутри корпуса 331А. В частности, масляные каналы включают в себя первый масляный канал 331а, второй масляный канал 331b и третий масляный канал 331с. Первый масляный канал 331а соединяет гидравлический канал 332 стороны КРЦ с гидравлическим каналом 333 стороны привода. Второй масляный канал 331b соединяет гидравлический канал 334 стороны педали с гидравлическим каналом 335 стороны создания реакции. Третий масляный канал 331с соединяет первый масляный канал 331а и второй масляный канал 331b друг с другом.
[0033] В частности, корпус 331А переключающего механизма 331 имеет четыре отверстия, т.е. с первого по четвертое - P1, Р2, Р3, Р4. Первое отверстие Р1 и четвертое отверстие Р4 соединены с первым масляным каналом 331а. Второе отверстие Р2 и третье отверстие Р3 соединены со вторым масляным каналом 331b. Первое отверстие Р1 сообщается с главным цилиндром 84 сцепления привода 8 сцепления через гидравлический канал 333 стороны привода. Второе отверстие Р2 сообщается с главным цилиндром 92 сцепления блока 9 педали сцепления через гидравлический канал 334 стороны педали. Третье отверстие Р3 сообщается с механизмом 93 создания реакции через гидравлический канал 335 стороны создания реакции. Четвертое отверстие Р4 сообщается с гидравлической камерой КРЦ 22 через гидравлический канал 332 стороны КРЦ.
[0034] Первый клапан 331d расположен в месте, которое ближе к гидравлическому каналу 333 стороны привода (первое отверстие Р1), чем к месту присоединения, в котором третий масляный канал 331с соединяется с первым масляным каналом 331а. Первый клапан 331d выполнен с возможностью открывания или закрывания. Второй клапан 331е расположен в месте, которое ближе к гидравлическому каналу 335 стороны создания реакции (третье отверстие Р3), чем к месту присоединения, в котором третий масляный канал 331с соединяется со вторым масляным каналом 331b. Второй клапан 331е выполнен с возможностью открывания или закрывания. Третий клапан 331f расположен на третьем масляном канале 331с. Третий клапан 331f выполнен с возможностью открывания или закрывания. Каждый из клапанов 331d, 331е, 331f состоит из электромагнитного клапана, который открывается или закрывается в ответ на управляющий сигнал открывания / закрывания клапана от ЭБУ 200 сцепления. Что касается открытого / закрытого состояния этих клапанов 331d, 331е, 331f, то когда в приводе 8 сцепления (первый рабочий механизм 310 (описан далее)) и т.п. нет неисправности (когда привод 8 сцепления и т.п. работает в нормальном режиме), первый клапан 331d и второй клапан 331е являются открытыми, а третий клапан 331f является закрытым. Т.е. первый масляный канал 331а обеспечивает сообщение между гидравлическим каналом 332 стороны КРЦ и гидравлическим каналом 333 стороны привода, а второй масляный канал 331b обеспечивает сообщение между гидравлическим каналом 334 стороны педали и гидравлическим каналом 335 стороны создания реакции, при этом первый масляный канал 331а и второй масляный канал 331b не сообщаются друг с другом.
[0035] В то время как конфигурация сцепляющего устройства 2 раскрыта выше, далее будет раскрыта конфигурация привода 8 сцепления и конфигурация блока 9 педали сцепления.
[0036] Привод 8 сцепления содержит электрический двигатель 81, червячный винт 82, червячное колесо 83 и главный цилиндр 84 сцепления.
[0037] Электрический двигатель 81 срабатывает в ответ на сигнал управления сцеплением от ЭБУ 200 сцепления. Червячный винт 82 сформирован на выходном валу электрического двигателя 81. По существу веерообразное червячное колесо 83 входит в зацепление с червячным винтом 82. В связи с этим, червячный винт 82 вращается (вращается в прямом направлении или вращается в обратном направлении), когда работает электрический двигатель 81, и червячное колесо 83 поворачивается в заранее заданном угловом диапазоне.
[0038] Конфигурация главного цилиндра 84 сцепления выполнена так, что поршень 84b установлен внутри корпуса 84а цилиндра. Один конец (правый конец на ФИГ. 2) штока 84с соединен с поршнем 84b, а другой конец (левый конец на ФИГ. 2) штока 84с соединен с червячным колесом 83. Место соединения, в котором шток 84с соединен с червячным колесом 83, незначительно смещено от центра вращения червячного колеса 83. В связи с этим, шток 84с перемещается вперед или назад по мере поворота червячного колеса 83.
[0039] Поскольку поршень 84b получает через шток 84с поворачивающее усилие в зависимости от поворота червячного колеса 83 в результате работы электрического двигателя 81, поршень 84b перемещается внутрь корпуса 84а цилиндра. Таким образом, главный цилиндр 84 сцепления создает гидравлическое давление. Гидравлическое давление, создаваемое главным цилиндром 84 сцепления, изменяется в ответ на положение хода поршня 84b внутри корпуса 84а цилиндра. В частности, когда управляющий сигнал выключения сцепления выдан от ЭБУ 200 сцепления, электрический двигатель 81 срабатывает так, что червячное колесо 83 поворачивается в направлении по часовой стрелке на данном чертеже. Таким образом, в главном цилиндре 84 сцепления гидравлическое давление создается, когда поршень 84b перемещается вперед (перемещается вправо на данном чертеже) внутри корпуса 84а цилиндра, и созданное гидравлическое давление подается в гидравлическую камеру КРЦ 22 через гидравлический канал 333 стороны привода, переключающий механизм 331 (первый масляный канал 331а переключающего механизма 331) и гидравлический канал 332 стороны КРЦ. В результате, сцепляющий механизм 21 расцепляется. С другой стороны, когда управляющий сигнал включения сцепления выдан от ЭБУ 200 сцепления, электрический двигатель 81 срабатывает так, что червячное колесо 83 поворачивается в направлении против часовой стрелки на данном чертеже. Таким образом, в главном цилиндре 84 сцепления поршень 84b перемещается назад (перемещается влево на данном чертеже) внутри корпуса 84а цилиндра, и гидравлическое давление, которое было подано в гидравлическую камеру КРЦ 22, сбрасывается. В результате, сцепляющий механизм 21 зацепляется.
[0040] Блок 9 педали сцепления содержит педаль сцепления 91 и главный цилиндр 92 сцепления.
[0041] Верхний конец ближней частьи педали 91 сцепления опирается с возможностью поворота на кронштейн педали сцепления (не показан). Отжимное усилие в направлении поворота в сторону водителя создается на педали 91 сцепления возвратной пружиной педали (не показана). Нажатие педали 91 сцепления водителем разрешено против отжимного усилия, создаваемого возвратной пружиной педали.
[0042] Главный цилиндр 92 сцепления сконфигурирован так, что поршень 92b установлен внутри корпуса 92а цилиндра. Один конец (левый конец на ФИГ. 2) штока 92с соединен с поршнем 92b, и другой конец (правый конец на ФИГ. 2) штока 92с соединен со средней частью педали 91 сцепления.
[0043] Когда поршень 92b получает управляющее усилие в зависимости от нажатия педали 91 сцепления водителем, поршень 92b перемещается внутри корпуса 92а цилиндра. Таким образом, главный цилиндр 92 сцепления создает гидравлическое давление. Гидравлическое давление, созданное главным цилиндром 92 сцепления, подается в механизм 93 создания реакции через гидравлический канал 334 стороны педали, переключающий механизм 331 (второй масляный канал 331b переключающего механизма 331) и гидравлический канал 335 стороны создания реакции.
[0044] Механизм 93 создания реакции создает реактивное усилие против гидравлического давления, подаваемого через гидравлический канал 335 стороны создания реакции. Механизм 93 создания реакции, например, может быть выполнен так, что поршень-приемник 93а давления, спиральная пружина 93b и т.п. размещены внутри механизма 93 создания реакции, и реактивное усилие против гидравлического давления создается посредством упругого восстанавливающего усилия спиральной пружины 93b. Таким образом, реактивное усилие против усилия нажатия водителем на педаль 91 сцепления создается так, чтобы водитель мог нажимать педаль 91 сцепления с тем же ощущением нажатия на педаль сцепления, как и при нажатии на педаль сцепления обычного сцепляющего устройства (сцепляющее устройство без системы сцепления с электронным управлением), или с управляющим усилием, меньшим по сравнению с обычным сцепляющим устройством. То есть водитель нажимает педаль 91 сцепления с получением реактивного усилия от механизма 93 создания реакции, поэтому водитель нажимает педаль сцепления 91 без возникновения ощущения непривычной работы педали 91 сцепления.
[0045] Далее со ссылкой на ФИГ. 3 раскрыта конфигурация управляющей системы, связанной с ЭБУ 100 двигателя и ЭБУ 200 сцепления.
[0046] Каждый из ЭБУ 100 двигателя и ЭБУ 200 сцепления содержит микрокомпьютер и интерфейсы ввода / вывода. Микрокомпьютер содержит ЦП, ПЗУ, резервное ОЗУ и т.п.
[0047] Датчик 101 хода педали газа, датчик 102 положения коленчатого вала, датчик 103 положения дроссельной заслонки, датчик 104 температуры охлаждающей жидкости и т.п. соединены с входным интерфейсом ЭБУ 100 двигателя. Датчик 101 хода педали газа выдает сигнал, соответствующий степени нажатия педали 51 газа (см. ФИГ. 1). Датчик 102 положения коленчатого вала выдает сигнал, соответствующий угловому положению коленчатого вала 11. Датчик 103 положения дроссельной заслонки выдает сигнал, соответствующий степени открытия дроссельного клапана 12. Дроссельный клапан 12 расположен во впускной системе двигателя 1. Датчик 104 температуры охлаждающей жидкости выдает сигнал, соответствующий температуре охлаждающей жидкости двигателя 1.
[0048] Двигатель 13 управления дроссельной заслонкой, инжектор 15, электрод-зажигатель 16 свечи зажигания и т.п. соединены с выходным интерфейсом ЭБУ 100 двигателя.
[0049] ЭБУ 100 двигателя определяет рабочее состояние двигателя 1 на основе различных блоков информации, предоставляемой датчиками, и в целом осуществляет управление работой двигателя 1 посредством управления двигателем 13 управления дроссельной заслонкой (контроль объема впускного воздуха), управления инжектором 15 (контроль впрыска топлива), управления электродом-зажигателем 16 (контроль фазы зажигания) и т.п.
[0050] Датчик 201 хода педали сцепления, датчик 202 хода педали тормоза, датчик 203 частоты вращения входного вала, датчик 204 частоты вращения выходного вала, реле 205 нейтрали, датчик 206 хода сцепления, датчик 207 хода привода и т.п. соединены с входным интерфейсом ЭБУ 200 сцепления. Датчик 201 хода педали сцепления выдает сигнал, соответствующий степени нажатия педали 91 сцепления. Датчик 202 хода педали тормоза выдает сигнал, соответствующий степени нажатия педали 53 тормоза. Датчик 203 частоты вращения входного вала выдает сигнал, соответствующий частоте вращения входного вала коробки 3 передач. Датчик 204 частоты вращения выходного вала выдает сигнал, соответствующий частоте вращения выходного вала коробки 3 передач. Реле 205 нейтрали определяет, установлен ли рычаг 6 переключения передач в нейтральное рабочее положение. Датчик 206 хода сцепления определяет ход сцепления в сцепляющем устройстве 2 (например, датчик 206 хода сцепления определяет положение скольжения выжимного подшипника 26 КРЦ 22). Датчик 207 хода привода определяет ход сцепления привода 8 сцепления (датчик 207 хода привода, например, определяет положение скольжения штока 84с).
[0051] Привод 8 сцепления, клапаны 331d, 331е, 331f и т.п. соединены с выходным интерфейсом ЭБУ 200 сцепления.
[0052] ЭБУ 100 двигателя и ЭБУ 200 сцепления соединены двунаправленной шиной так, чтобы осуществлять коммуникацию друг с другом для приема или передачи требуемой информации в обоих направлениях.
Движение накатом
[0053] Автомобиль в соответствии с настоящим изобретением способен двигаться накатом. Движение накатом означает состояние, когда автомобиль движется с выключенным во время движения автомобиля сцепляющим устройством 2. Поскольку тормозящее усилие, вызываемое сопротивлением двигателя 1 (так называемое торможение двигателем), не создается во время движения накатом, то возможно увеличение дальности хода при движении накатом, что дает возможность улучшить показатели топливной экономичности двигателя 1. Режим движения при движении накатом содержит случай, когда двигатель 1 запущен (работает с частотой вращения близкой к частоте вращения холостого хода) (может именоваться также движением накатом в режиме холостого хода), и случай, когда двигатель 1 остановлен (частота вращения двигателя 1 равна нулю за счет прекращения впрыска топлива через инжектор 15 и прекращение работы свечи зажигания).
[0054] Условие начала движения накатом удовлетворено, если во время движения автомобиля возникает состояние, когда ни одна из педали 51 газа, педали 53 тормоза и педали 91 сцепления не нажимается (состояние, когда степень нажатия равна нулю или по существу равна нулю), и такое состояние сохраняется в течение заранее заданного периода времени (например, около 3 секунд), и при этом скорость хода автомобиля выше или равна заранее заданному значению. В дополнение к этим условиям, условие начала движения накатом может также содержать условие, что угол поворота рулевого колеса имеет меньшее значение, чем заранее заданное значение угла. Условие прекращения движения накатом удовлетворено, если во время движения автомобиля возникает состояние, когда нажата, по меньшей мере, одна педаль из педали 51 газа, педали 53 тормоза и педали 91 сцепления, или когда скорость хода автомобиля стала ниже заранее заданного значения. В других случаях условие прекращения движения накатом может также содержать условие, что угол поворота рулевого колеса становится равным или большим, чем заранее заданное значение угла.
[0055] Управление активацией или деактивацией режима движения накатом (управление накатом) осуществляется ЭБУ 100 двигателя и ЭБУ 200 сцепления. В связи с этим, в соответствии с аспектом изобретения в ЭБУ 100, 200 функциональный блок, осуществляющий управление накатом, выполнен в качестве блока управления накатом (блок управления накатом, который выключает сцепляющее устройство посредством работы привода сцепления, когда удовлетворено заранее заданное условие начала движения накатом во время движения автомобиля в состоянии, когда сцепляющее устройство включено).
[0056] В связи с этим, в существующей системе сцепления с электронным управлением, раскрытой в патентной заявке JP 2012-112499 А, если происходит сбой и т.п. в работе привода сцепления, датчика хода педали сцепления и т.п. (если возникает нарушение в работе привода сцепления), сцепляющее устройство не способно срабатывать в ответ на степень нажатия педали сцепления. Например, если произошла неисправность в состоянии, когда отсутствует подача гидравлического давления на сцепляющее устройство (в состоянии, когда сцепляющее устройство включено, т.е. находится в состоянии зацепления), то невозможно выключить сцепляющее устройство, даже когда водитель нажимает педаль сцепления. В других случаях, если произошла неисправность в состоянии, когда гидравлическое давление подается на сцепляющее устройство (в состоянии, когда сцепляющее устройство выключено, т.е. находится в состоянии расцепления), то невозможно включить сцепляющее устройство, даже когда водитель отпускает педаль сцепления.
[0057] Чтобы предотвратить неконтролируемое водителем поведение автомобиля, когда возникает ситуация, в которой невозможно выключить сцепляющее устройство, эффективность редукторного механизма, состоящего червячной передачи и червячного колеса, традиционно снижают заранее в приводе сцепления. Однако если предусмотрен такой механизм со сниженной эффективностью (обычно называемый самоблокирующимся механизмом), то усилие, создаваемое приводом сцепления, стремится к уменьшению, поэтому необходимо увеличить размер электрического двигателя 81, чтобы увеличить усилие. Поскольку для этого необходимо увеличить передаточное число редукторного механизма, такая конфигурация приводит к увеличению размера редукторного механизма.
[0058] Настоящий вариант осуществления рассмотрен ввиду этого пункта и позволяет сцепляющему устройству 2 работать в ответ на степень нажатия педали 91 сцепления, даже когда возникает нарушение в работе привода 8 сцепления. Настоящий вариант осуществления предназначен для уменьшения размера привода 8 сцепления за счет устранения необходимости использования привода 8 сцепления с самоблокирующимся механизмом.
[0059] В частности, когда отсутствует сбой в работе привода 8 сцепления, датчика 201 хода педали сцепления и т.п. (при отсутствии нарушения в работе привода 8 сцепления), первый клапан 331d и второй клапан 331е переключающего механизма 331 открыты, а третий клапан 331f закрыт, как указано выше. Т.е. четвертое отверстие Р4 сообщается только с первым отверстием Р1 из всех отверстий, а второе отверстие Р2 сообщается только с третьим отверстием Р3 из всех отверстий. Таким образом, первый масляный канал 331а сообщает гидравлический канал 332 стороны КРЦ с гидравлическим каналом 333 стороны привода, а второй масляный канал 331b сообщает гидравлический канал 334 стороны педали с гидравлическим каналом 335 стороны создания реакции. В этом случае, в соответствии с вышеуказанным раскрытием, возможно управление работой сцепляющего устройства 2 за счет подачи в гидравлическую камеру КРЦ 22 гидравлического давления, создаваемого главным цилиндром 84 сцепления в результате работы привода 8 сцепления.
[0060] С другой стороны, когда возникает неисправность в работе привода 8 сцепления, датчика 201 хода педали сцепления и т.п. (когда возникает нарушение в работе привода 8 сцепления), первый клапан 331d и второй клапан 331е закрыты, а третий клапан 331f открыт. Т.е. четвертое отверстие Р4 сообщается только со вторым отверстием Р2 из всех отверстий, а сообщение каждого из первого отверстия Р1 и третьего отверстия Р3 с другими отверстиями прервано. Таким образом, третий масляный канал 331 с обеспечивает сообщение гидравлического канала 332 стороны КРЦ с гидравлическим каналом 334 стороны педали, и сообщение каждого из гидравлического канала 333 стороны привода и гидравлического канала 335 стороны создания реакции с любым из других гидравлических каналов прервано. В этом случае возможна работа сцепляющего устройства 2 за счет подачи в гидравлическую камеру КРЦ 22 гидравлического давления, создаваемого главным цилиндром 92 в ответ на управляющее усилие нажатия педали 91 сцепления водителем.
[0061] С такой конфигурацией первый рабочий механизм 310 содержит привод 8 сцепления и гидравлический контур 330 сцепления (гидравлический контур 333 стороны привода и гидравлический канал 332 стороны КРЦ). Т.е., когда отсутствует неисправность привода 8 сцепления, датчика 201 хода педали сцепления и т.п., сцепляющее устройство 2 работает за счет регулировки гидравлического давления, подаваемого в гидравлическую камеру КРЦ 22 с использованием первого рабочего механизма 310. Таким образом, первый рабочий механизм 310 задействует сцепляющее устройство 2 посредством регулировки гидравлического давления (давление жидкости) через работу привода 8 сцепления. В связи с этим, гидравлический канал 333 стороны привода и гидравлический канал 332 стороны КРЦ образуют первый канал 330А (первый канал, который регулирует давление жидкости при направлении потока рабочей жидкости в жидкостную напорную камеру или из жидкостной напорной камеры за счет работы привода сцепления) в соответствии с аспектом изобретения.
[0062] С другой стороны, блок 9 педали сцепления и гидравлический контур 330 сцепления (гидравлический канал 334 стороны педали и гидравлический канал 332 стороны КРЦ) содержит второй рабочий механизм 320. Т.е., когда возникает неисправность привода 8 сцепления, датчика 201 хода педали сцепления и т.п., сцепляющее устройство 2 работает за счет регулировки гидравлического давления, подаваемого в гидравлическую камеру КРЦ 22, с использованием второго рабочего механизма 320. Таким образом, второй рабочий механизм 320 приводит в действие сцепляющее устройство 2 посредством подачи в сцепляющее устройство 2 гидравлического давления (давление жидкости), получаемого от управляющего усилия нажатия педали 91 сцепления водителем. В связи с этим, гидравлический канал 334 стороны педали и гидравлический канал 332 стороны КРЦ образуют второй канал 330В (второй канал, который регулирует давление жидкости при направлении потока рабочей жидкости в жидкостную напорную камеру или из жидкостной напорной камеры за счет использования управляющего усилия, воздействующего на педаль сцепления) в соответствии с аспектом изобретения.
[0063] Таким образом, с описанным выше открыванием / закрыванием каждого из клапанов 331d, 331е, 331f происходит переключение переключающего механизма 331 так, чтобы изменять гидравлические каналы (каналы рабочей жидкости) в гидравлическом контуре 330 сцепления между состоянием, когда сцепляющее устройство 2 управляется первым рабочим механизмом 310 и состоянием, когда сцепляющее устройство 2 управляется вторым рабочим механизмом 320. Другими словами переключающий механизм 331 способен переключать каналы сообщения рабочей жидкости с гидравлической камерой (жидкостная напорная камера) КРЦ 22 между первым каналом 330А и вторым каналом 330В.
[0064] Операция переключения переключающего механизма 331 выполняется ЭБУ 200 сцепления. В связи с этим, в ЭБУ 200 сцепления функциональный блок, осуществляющий управление переключением переключающего механизма 331, выполнен в качестве контроллера (контроллер, который в случае определения контроллером наличия нарушения в работе привода сцепления, управляет переключающим механизмом так, чтобы изменить канал рабочей жидкости, сообщающийся с жидкостной напорной камерой с первого канала на второй канал) в соответствии с аспектом изобретения.
[0065] Таким образом, привод 8 сцепления, педаль 91 сцепления, каналы 330А, 330В, механизм 93 создания реакции, переключающий механизм 331 и контроллер (ЭБУ 200 сцепления) для переключения переключающего механизма 331 и т.п. образуют устройство 300 управления сцеплением (устройство управления сцеплением, которое переключает сцепляющее устройство 2 между состоянием зацепления (включения) и состоянием расцепления (выключения)) в соответствии с аспектом изобретения.
[0066] «Третий канал (третий канал, который направляет рабочую жидкость в механизм создания реакции или из механизма создания реакции с использованием управляющего усилия педали сцепления)» в соответствии с аспектом изобретения соответствует гидравлическому каналу 334 стороны педали и гидравлическому каналу 335 стороны создания реакции.
[0067] В настоящем варианте осуществления, когда движение накатом продолжается в течение заранее заданного периода времени после того как начато движение накатом, циркуляция рабочего масла ограничена в гидравлическом канале 332 стороны КРЦ посредством закрывания первого клапана 331d и третьего клапана 331f, и открывания второго клапана 331е. Таким образом, движение накатом продолжается за счет поддержания выключенного (расцепленного) состояния устройства 2 сцепления без продолжения работы привода 8 сцепления (работа привода 8 сцепления для поддержания гидравлического давления, подаваемого в сцепляющее устройство 2).
[0068] Управление в случае, когда движение накатом продолжается в течение заранее заданного периода времени, осуществляется ЭБУ сцепления 200. В связи с этим, функциональный блок представляет собой такой блок, который осуществляет данное управление в ЭБУ 200 сцепления в соответствии с аспектом изобретения (переключающий блок наката, который в случае продолжения движения накатом в течение заранее заданного периода времени после начала движения накатом переключает переключающий механизм так, чтобы прервать сообщение первого канала).
[0069] Далее приведено описание алгоритма управления вышеуказанным переключением переключающего механизма 331 со ссылкой на функциональную схему на ФИГ. 4. Эта функциональная схема осуществляется многократно с заранее заданными временными интервалами. Перед началом движения автомобиля (например, при запуске двигателя 1), каждый из атрибутов (описаны далее) установлен на «0».
[0070] Сначала на шаге ST1 определяется, установлено ли значение атрибута сбоя первого рабочего механизма в ЭБУ 200 сцепления на «1». Атрибут сбоя первого рабочего механизма установлен на «1», когда определено, что в первом рабочем механизме 310 произошел сбой.
[0071] Поскольку перед началом движения автомобиля атрибут сбоя первого рабочего механизма установлен на «0», на шаге ST1 выполнено отрицательное определение, и алгоритм переходит к шагу ST2. На шаге ST2 происходит считывание указанных выше различных блоков информации (выходные сигналы) от датчиков. Например, выполняется считывание информации о степени нажатия педали 51 газа от датчика 101 хода педали газа, информация о степени нажатия педали 91 сцепления от датчика 201 хода педали сцепления, информация о степени нажатия педали 53 тормоза от датчика 202 хода педали тормоза, информация о ходе сцепления сцепляющего устройства 2 от датчика 206 хода сцепления, информация о ходе сцепления привода 8 сцепления от датчика 207 хода привода и т.д.
[0072] После этого алгоритм переходит к шагу ST3, на котором выполняется определение, произошел ли сбой в работе первого рабочего механизма 310. В качестве примера такого определения, когда автомобиль движется не в режиме наката, степень нажатия педали 91 сцепления, полученная на основе выходного сигнала от датчика 201 хода педали сцепления, сравнивается с ходом сцепления сцепляющего устройства 2, полученным на основе выходного сигнала от датчика 206 хода сцепления. Когда возникает отклонение, превышающее допустимый диапазон, между этой степенью нажатия и ходом сцепления, то появляется вероятность возникновения сбоя в работе привода 8 сцепления или неисправности датчика 201 хода педали сцепления. Таким образом, определяется, что произошел сбой в работе первого рабочего механизма 310 и выполняется положительное определение на шаге ST3. Допустимый диапазон отклонения между степенью нажатия и ходом сцепления задан заранее экспериментальным путем или с использованием моделирования. Когда автомобиль движется не в режиме наката, степень нажатия педали 91 сцепления, полученная на основе выходного сигнала от датчика 201 хода педали сцепления, сравнивается с ходом сцепления привода 8 сцепления, полученным на основе выходного сигнала от датчика 207 хода привода. Когда происходит отклонение между этой степенью нажатия и ходом сцепления, превышающее допустимый диапазон, может быть определено, что произошел сбой, и положительное определение может быть выполнено на шаге ST3.
[0073] Такая операция определения разрешена к выполнению в ситуации, когда степень нажатия педали 91 сцепления изменилась незначительно. Например, когда водитель начал нажимать педаль 91 сцепления, определение того, произошел ли сбой, выполняется на основе выходных сигналов от датчиков в момент времени, когда степень нажатия составила около 20% от полной степени нажатия (состояние нажатия 100%) педали 91 сцепления. Т.е. факт того, произошел ли сбой, определяется в состоянии, в котором все еще остается запас хода нажатия педали 91 сцепления. Это связано с тем, что, как будет показано далее, в случае перехода от состояния, когда работой сцепляющего устройства 2 управляет первый рабочий механизм 310, к состоянию, когда работой сцепляющего устройства 2 управляет второй рабочий механизм 320, создание гидравлического давления обеспечивается от нажатия (операции увеличения нажатия) педали 91 сцепления (гидравлическое давление для расцепления сцепляющего устройства 2; гидравлическое давление, созданное главным цилиндром 92 сцепления).
[0074] Факт наступления сбоя в первом рабочем механизме 310 может быть установлен посредством сравнения управляющего сигнала сцепления, который выдан на привод 8 сцепления, с ходом сцепления сцепляющего устройства 2, полученным на основе выходного сигнала от датчика 206 хода сцепления, или с ходом сцепления привода 8 сцепления, полученного на основе выходного сигнала от датчика 207 хода привода. С использованием этой операцией определения возможно определять, произошел ли сбой в первом рабочем механизме 310 независимо от того, выполнял ли автомобиль движение накатом.
[0075] Когда отсутствует сбой в первом рабочем механизме 310, и отрицательное определение выполнено на шаге ST3, алгоритм переходит к шагу ST4. На шаге ST4 определяется, установлено ли значение атрибута движения накатом, сохраненное в ЭБУ 200 сцепления, на «1». Атрибут движения накатом установлен на «1», когда начато движение накатом, и установлен на «0», когда прекращено движение накатом (отменено).
[0076] Поскольку атрибут движения накатом сброшен на «0» при начале движения автомобиля, отрицательное определение выполнено на шаге ST4, и затем алгоритм переходит к шагу ST5. На шаге ST5 определяется, удовлетворено ли условие начала движения накатом. Как указано выше, условие начала движения накатом удовлетворено, когда во время движения автомобиля возникает состояние, когда отсутствует нажатие на любую из педали 51 газа, педали 53 тормоза и педали 91 сцепления (состояние, когда степень нажатия равна нулю или по существу равна нулю), и такое состояние сохраняется в течение заранее заданного периода времени (например, около 3 секунд), и скорость хода автомобиля выше или равна заранее заданному значению. Степень нажатия педали 51 газа получают на основе выходного сигнала от датчика 101 хода педали газа. Степень нажатия педали 53 тормоза получают на основе выходного сигнала от датчика 202 хода педали тормоза. Степень нажатия педали 91 сцепления получают на основе выходного сигнала от датчика 201 хода педали сцепления. Скорость хода автомобиля рассчитывается на основе выходного сигнала от датчика 204 частоты вращения выходного вала.
[0077] Поскольку педаль 51 газа обычно используют для цели ускорения хода автомобиля, а педаль 91 сцепления обычно используют для переключения коробки 3 передач, то когда автомобиль трогается, условие движения накатом не выполняется, поэтому на шаге ST5 делается отрицательное определение, и затем алгоритм переходит к шагу ST6. На шаге ST6 первый клапан 331d и второй клапан 331е являются открытыми, а третий клапан 331f является закрытым, после этого алгоритм повторяется. Т.е., как указано выше, первый масляный канал 331а сообщает гидравлический канал 332 стороны КРЦ с гидравлическим каналом 333 стороны привода, второй масляный канал 331b сообщает гидравлический канал 334 стороны педали с гидравлическим каналом 335 стороны создания реакции, а сообщение между первым масляным каналом 331а и вторым масляным каналом 331b прервано. Т.е. первый рабочий механизм 310 управляет работой сцепляющего устройства 2. В связи с этим, когда отсутствует сбой в работе первого рабочего механизма 310 (отрицательное определение выполнено на шаге ST3), операции шага ST1-ST6 повторяются до тех пор, пока не будет выполнено условие движения накатом (до положительного определения на шаге ST5), и состояние, когда первый рабочий механизм 310 управляет работой сцепляющего устройства 2, продолжается.
[0078] Когда условие начала движения накатом удовлетворено и положительное определение выполнено на шаге ST5, алгоритм переходит к шагу ST7. На шаге ST7 начинается движение накатом. Т.е. сцепляющее устройство 2 выключается, когда управляющий сигнал выключения сцепления выдается от ЭБУ 200 сцепления (который соответствует работе блока управления накатом в соответствии с аспектом изобретения, и соответствует операции выключения сцепляющего устройства за счет работы привода сцепления, когда удовлетворено заранее заданное условие начала движения накатом, когда автомобиль движется в состоянии с включенным устройством сцепления в ситуации, в которой сцепляющее устройство работает, в то время, когда первый канал сообщен с жидкостной напорной камерой). Кроме того, целевая частота вращения двигателя 1 устанавливается на уровне частоты вращения в режиме холостого хода, или двигатель 1 останавливается. После этого алгоритм переходит к шагу ST8, и атрибут движения накатом устанавливается на «1».
[0079] После начала движения накатом алгоритм переходит к шагу ST9. На шаге ST9 запускается отсчет счетчика продолжительности движения накатом в ЭБУ 200 сцепления. Время, истекшее до остановки счетчика продолжительности движения накатом (время истекло) задается заранее на основе экспериментальных данных или моделирования. Например, заданный период составляет около 5 секунд.
[0080] После начала отсчета счетчика продолжительности движения накатом алгоритм переходит к шагу ST10. На шаге ST10 определяется, остановлен ли счетчик продолжительности движения накатом. Поскольку счетчик продолжительности движения накатом еще не остановлен в момент, когда счетчик продолжительности движения накатом начинает отсчет, на шаге ST10 делается отрицательное определение, и затем происходит повторение алгоритма.
[0081] В следующем алгоритме, если атрибут сбоя первого рабочего механизма установлен на «0» (отрицательное определение сделано на шаге ST1), и отсутствует сбой в работе первого рабочего механизма 310 (отрицательное определение сделано на шаге ST3), и атрибут движения накатом установлен на «1» в последнем прохождении алгоритма, то на шаге ST4 делается положительное определение, и алгоритм переходит к шагу ST11. На шаге ST11 определяется, удовлетворено ли условие прекращения движения накатом. Как указано выше, когда имеется нажатие на педаль 51 газа или педаль 53 тормоза или педаль 91 сцепления, или когда скорость хода автомобиля становится ниже заранее заданного значения, условие прекращения движения накатом удовлетворяется, и положительное определение делается на шаге ST11.
[0082] Когда условие прекращения движения накатом еще не удовлетворено, и на шаге ST11 делается отрицательное изменение, алгоритм переходит к шагу ST12. На шаге ST12 определяется, установлен ли атрибут блокировки движения накатом, сохраненный в ЭБУ 200 сцепления, на «1». Атрибут блокировки движения накатом устанавливается на «1» при переключении на состояние, когда и первый клапан 331d, и третий клапан 331f закрыты во время движения накатом, и циркуляция рабочего масла ограничена гидравлическим каналом 332 стороны КРЦ (далее такое состояние называют состоянием блокировки движения накатом). Атрибут блокировки движения накатом устанавливается на «0», когда блокировка движения накатом отменена.
[0083] Поскольку атрибут блокировки движения накатом сброшен на «0» при начале движения автомобиля, на шаге ST12 делается отрицательное определение, и затем алгоритм переходит к шагу ST10. На шаге ST10 определяется, остановлен ли счетчик продолжительности движения накатом, как указано выше. В ситуации, когда отсутствует сбой в первом рабочем механизме 310 (отрицательное определение сделано на шаге ST3), и условие прекращения движения накатом не удовлетворено (отрицательное определение сделано на шаге ST11), операции шагов ST1-ST4, ST11, ST12 и ST10 повторяются до тех пор, пока не будет остановлен счетчик продолжительности движения накатом (до положительного определения на шаге ST10).
[0084] Когда счетчик продолжительности движения накатом остановлен и положительное определение сделано на шаге ST10, алгоритм переходит к шагу ST13. На шаге ST13 первый клапан 331d является закрытым, второй клапан 331е является открытым, и третий клапан 331f является закрытым. Т.е., как указано выше, автомобиль переводится в состояние блокировки движения накатом (которое соответствует работе, осуществляемой блоком переключения наката в соответствии с аспектом изобретения, и которое соответствует такой операции переключения переключающего механизма, чтобы прервать сообщение первого канала, когда движение накатом продолжается в течение заранее заданного периода времени после начала движения накатом). В этот состоянии блокировки движения накатом, поскольку гидравлическое давление внутри гидравлического канала 332 стороны КРЦ поддерживается, становится возможно продолжение движения накатом, в то время как расцепленное состояние сцепляющего устройства 2 сохраняется без продолжения работы привода 8 сцепления (работы электрического двигателя 81 для поддержания гидравлического давления в гидравлическом канале 332 стороны КРЦ). Т. е. поскольку состояние поддержания гидравлического давления, созданного за счет использования приводного усилия электрического двигателя 81 привода 8 сцепления, может быть отменено, возможна значительная экономия электроэнергии, потребляемой электрическим двигателем 81.
[0085] После перехода автомобиля в состояние блокировки движения накатом на шаге ST13, алгоритм переходит к шагу ST14. На шаге ST14 атрибут блокировки движения накатом устанавливается на «1».
[0086] После перехода автомобиля в состояние блокировки движения накатом данным способом, в следующем алгоритме, когда отсутствует неисправность в работе первого рабочего механизма 310, и условие прекращения движения накатом не удовлетворено, на шаге ST12 делается положительное определение. Т.е. сохраняется состояние блокировки движения накатом, и операции шагов ST1-ST4, ST11 и ST12 повторяются.
[0087] Когда условие прекращения движения накатом удовлетворено, положительное определение делается на шаге ST11, и алгоритм переходит к шагу ST15. На шаге ST15 движение накатом прекращается. Т.е. управляющий сигнал включения сцепления выдается от ЭБУ 200 сцепления, и устройство 2 сцепления включается. Управление частотой вращения двигателя 1 выполняется так, чтобы соизмерять ее со степенью нажатия педали 51 газа, полученной на основе выходного сигнала датчика 101 хода педали газа. После этого алгоритм переходит к шагу ST16. На шаге ST16 и атрибут движения накатом, и атрибут блокировки движения накатом сбрасываются на «0», и затем алгоритм переходит к шагу ST6. Как указано выше, на шаге ST6 первый клапан 331d и второй клапан 331е являются открытыми, а третий клапан 331f является закрытым, после этого алгоритм повторяется. Т.е., как указано выше, первый масляный канал 331а сообщает гидравлический канал 332 стороны КРЦ с гидравлическим каналом 333 стороны привода, второй масляный канал 331b сообщает гидравлический канал 334 стороны педали с гидравлическим каналом 335 стороны создания реакции, и сообщение между первым масляным каналом 331а и вторым масляным каналом 331b прервано. Т.е. первый рабочий механизм 310 управляет работой сцепляющего устройства 2.
[0088] С другой стороны, когда в первом рабочем механизме 310 происходит сбой, на шаге ST3 делается положительно определение, и алгоритм переходит к шагу ST17. На шаге ST17 первый клапан 331d и второй клапан 331е являются закрытыми, и третий клапан 331f является открытым. Т.е. третий масляный канал 331с сообщает первый масляный канал 331а (масляный канал со стороны четвертого отверстия Р4 первого масляного канала 331а относительно первого клапана 331d) со вторым масляным каналом 331b (масляный канал со стороны второго отверстия Р2 второго масляного канала 331b относительно второго клапана 331е). Т.е. гидравлический канал 332 стороны КРЦ сообщается с гидравлическим каналом 334 стороны педали. Кроме того, сообщение между гидравлическим каналом 332 стороны КРЦ и гидравлическим каналом 333 стороны привода прерывается, и сообщение между гидравлическим каналом 334 стороны педали и гидравлическим каналом 335 стороны создания реакции также прерывается.
[0089] В этом случае, синхронизация переключения клапанов 331d, 331е, 331f выполнена так, что переключение клапанов 331d, 331е, 331f происходит единовременно. В других случаях, первый клапан 331d может быть переключен (первый клапан 331d закрывается) до переключения второго клапана 331е или третьего клапана 331f. В этом случае, когда сообщение между гидравлическим каналом 332 стороны КРЦ и гидравлическим каналом 333 стороны привода прервано заранее, другие клапаны 331е, 331f переключаются в состоянии, в котором гидравлическое давление в гидравлическом канале 332 стороны КРЦ сохраняется. Таким образом, становится возможным уменьшение колебаний гидравлического давления, и в результате становится возможной стабилизация нагрузки по моменту сцепляющего устройства 2.
[0090] В состоянии, когда переключение клапанов 331d, 331е, 331f осуществлено данным образом, сцепляющее устройство 2 переходит под управление второго рабочего механизма 320. Т.е. за счет подачи гидравлического давления в сцепляющее устройство 2, получаемого от управляющего усилия при нажатии педали 91 сцепления водителем, срабатывает сцепляющее устройство 2. Таким образом, даже в случае сбоя (когда происходит неисправность в работе первого рабочего механизма 310) сцепляющее устройство 2 способно функционировать в ответ на степень нажатия педали 91 сцепления.
[0091] После этого алгоритм переходит к шагу ST18. На шаге ST18 и атрибут движения накатом, и атрибут блокировки движения накатом сбрасываются на «0», и затем алгоритм переходит к шагу ST19. На шаге ST19 атрибут сбоя первого рабочего механизма устанавливается на «1». Водитель получает предупреждение (предупреждение о том, что произошел сбой в работе первого рабочего механизма 310) путем включения лампы сигнализации неисправности (лампа предупреждения) на приборной панели внутри кабины автомобиля, информация о сбое записывается в диагностическую информацию в ЭБУ 200 сцепления, а затем выполняется повторение алгоритма.
[0092] В следующем алгоритме, поскольку атрибут сбоя первого рабочего механизма установлен на «1» в последнем алгоритме, на шаге ST1 делается положительное определение, и происходит повторение алгоритма. Т.е. поддерживается состояние, когда первый клапан 331d и второй клапан 331е остаются закрытыми, а третий клапан 331f - открытым, при этом также сохраняется состояние подсвечивания лампы сигнализации неисправности на приборной панели.
[0093] Вышеуказанные операции повторяются с заранее заданными временными интервалами.
[0094] Когда атрибут сбоя первого рабочего механизма установлен на «1», и лампа сигнализации неисправности подсвечивается, как указано выше, автомобиль необходимо доставить к дилеру, станцию технического обслуживания и т.п. и выполнить ремонт первого рабочего механизма 310. В то же время, по завершении ремонта, атрибут сбоя первого рабочего механизма устанавливают на «0», используя операции перезаписи данных ЭБУ 200 сцепления.
[0095] В то время как выполняются вышеуказанные операции, операция шага ST17 (операция переключения каждого из клапанов 331d, 331е, 331f) в соответствии с аспектом изобретения соответствует работе контроллера, и соответствует операции для управления переключающим механизмом, чтобы канал рабочей жидкости для сообщения с жидкостной напорной камерой, был переключен с первого канала на второй канал, когда контроллер определяет возникновение нарушения в работе привода сцепления.
[0096] Как указано выше, в настоящем варианте осуществления, когда определено, что возникло нарушение в работе привода 8 сцепления, переключающий механизм 331 управляется так, чтобы переключить канал рабочей жидкости, сообщающийся с гидравлической камерой (жидкостная напорная камера) КРЦ 22, с первого канала 330А на второй канал 330В, и канал рабочего масла меняется с состояния, когда сцепляющее устройство 2 управляется первым рабочем механизмом 310, на состояние, когда сцепляющее устройство 2 управляется вторым рабочим механизмом 320. Таким образом, становится возможна подача гидравлического давления (давление жидкости), полученного в результате управляющего усилия нажатия педали 91 сцепления водителем, на сцепляющее устройство 2, чтобы обеспечить возможность работы сцепляющего устройства 2. Т.е., даже когда существует нарушение в работе привода 8 сцепления, сцепляющее устройство 2 способно работать в ответ на степень нажатия педали 91 сцепления.
[0097] Например, если возникает нарушение в работе привода 8 сцепления, то когда автомобиль трогается, не возникает препятствий для начала движения автомобиля, и не возникает неконтролируемого водителем поведения автомобиля. Если возникает нарушение в работе привода 8 сцепления во время движения автомобиля, то не возникает препятствий для возможности ускорения хода автомобиля, не возникает также препятствий для переключения коробки 3 передач (операция переключения рычага 6 из определенного положения в нейтральное положение не заблокирована), и не возникает шум в коробке передач во время операции переключения передачи (при нахождении рычага 6 в нейтральном положении шум в коробке передач не возникнет при переключении рычага 6 переключения передач из нейтрального положения в другое положение).
[0098] Как указано выше, во время движения накатом возможна экономия электрической энергии, потребляемой электрическим двигателем 81, за счет перехода автомобиля в состояние блокировки движения накатом посредством переключающей операции в переключающем механизме 331. В связи с этим, становится возможным предложить устройство 300 управления сцеплением, которое способно улучшить практичность системы сцепления (система сцепления с электронным управлением) с приводом 8 сцепления.
[0099] Как указано выше, когда возникает нарушение в работе привода 8 сцепления, становится возможным управлять работой сцепляющего устройства 2 с использованием второго рабочего механизма 320 за счет переключающей операции переключающего механизма 331, поэтому не требуется использование самоблокирующегося механизма в приводе 8 сцепления. Т.е. не требуется снижать эффективность редукторного механизма, состоящего из червячного винта 82 и червячного колеса 83 в приводе 8 сцепления. В связи с этим, усилие привода 8 сцепления возрастает, реакция сцепляющего устройства 2 (ответная операция между состоянием зацепления и состоянием расцепления) возрастает, а размер привода 8 сцепления может быть уменьшен.
[0100] Когда определено, что нарушения в работе привода 8 сцепления нет, переключающий механизм 331 сообщает канал подачи гидравлического давления (гидравлический канал 334 стороны педали и гидравлический канал 335 стороны создания реакции; третий канал) между педалью 91 сцепления и механизмом 93 создания реакции. Таким образом, как указано выше, возможно создание реактивного усилия против управляющего усилия нажатия педали 91 сцепления водителем с использованием механизма 93 создания реакции. Таким образом, водитель нажимает педаль 91 сцепления, при этом получая реактивное усилие, в результате водитель получает возможность нажимать педаль 91 сцепления без ощущения непривычной работы педали 91 сцепления. С другой стороны, когда определено, что возникло нарушение в работе привода 8 сцепления, переключающий механизм 331 прерывает канал подачи гидравлического давления (третий канал) между педалью 91 сцепления и механизмом 93 создания реакции. Таким образом, поскольку реактивное усилие от механизма 93 создания реакции не воздействует на педаль 91 сцепления, управляющее усилие нажатия на педаль 91 сцепления водителем может быть установлено на уровне минимального необходимого усилия для управления работой сцепляющего устройства 2, не ухудшающего эксплуатационных свойств.
Альтернативный вариант осуществления
[0101] Далее будет раскрыт альтернативный вариант осуществления. Настоящий альтернативный вариант осуществления изобретения отличается от раскрытого выше варианта осуществления изобретения конфигурацией переключающего механизма. Остальные компоненты и операции аналогичны компонентам и операциям раскрытого выше варианта осуществления, поэтому будут раскрыты только компоненты и операции переключающего механизма.
[0102] ФИГ. 5 представляет собой вид, на котором показана общая схематичная конфигурация системы сцепления в соответствии с настоящим альтернативным вариантом осуществления изобретения. Как показано на ФИГ. 5, в системе сцепления, переключающий механизм содержат переключающий клапан 331В, представляющий собой двухпозиционный регулирующий клапан с четырьмя отверстиями. Переключающий клапан 331В, а также переключающий механизм 331 в соответствии с раскрытым выше вариантом осуществления содержит четыре отверстия: P1, Р2, Р3, Р4.
[0103] Как и в случае с раскрытым выше вариантом осуществления изобретения, первое отверстие Р1 сообщено с главным цилиндром 84 сцепления привода 8 сцепления через гидравлический канал 333 стороны привода, второе отверстие Р2 сообщено с главным цилиндром 92 сцепления блока 9 педали сцепления через гидравлический канал 334 стороны педали, третье отверстие Р3 сообщено с механизмом 93 создания реакции через гидравлический канал 335 стороны создания реакции, и четвертое отверстие Р4 сообщено с гидравлической камерой КРЦ 22 через гидравлический канал 332 стороны КРЦ.
[0104] Положение золотникового клапанного элемента в клапане электрически переключается соленоидом между первым переключающим положением и вторым переключающим положением. В первом переключающем положении (положение, в котором золотниковый клапанный элемент перемещен вниз, как показано на ФИГ. 5), первое отверстие Р1 и четвертое отверстие Р4 сообщаются друг с другом, и второе отверстие Р2 и третье отверстие Р3 сообщаются друг с другом. Таким образом, гидравлический канал 332 стороны КРЦ и гидравлический канал 333 стороны привода соединены друг с другом, и гидравлический канал 334 стороны педали соединен с гидравлическим каналом 335 стороны создания реакции. С другой стороны, во втором переключающем положении (положение, в которое золотниковый клапанный элемент окажется при его перемещении вверх на ФИГ. 5), второе отверстие Р2 и четвертое отверстие Р4 сообщаются друг с другом, а сообщение каждого из первого отверстия Р1 и третьего отверстия РЗ прервано как друг с другом, так и с остальными отверстиями. Таким образом, гидравлический канал 332 стороны КРЦ и гидравлический канал 334 стороны педали оказываются соединенными друг с другом.
[0105] ФИГ. 6 иллюстрирует конфигурацию управляющей системы, связанной с ЭБУ 100 двигателя и ЭБУ 200 сцепления, в соответствии с настоящим альтернативным вариантом осуществления изобретения. В настоящем варианте осуществления в добавление к конфигурации раскрытого выше варианта осуществления, датчик 208 хода главного цилиндра и датчик 209 хода создания реакции соединены с входным интерфейсом ЭБУ 200 сцепления. Датчик 208 хода главного цилиндра выдает сигнал, соответствующий ходу (например, положение поршня 92b) главного цилиндра 92 сцепления. Датчик 209 хода создания реакции выдает сигнал, соответствующий положению поршня-приемника 93а давления механизма 93 создания реакции.
[0106] В настоящем альтернативном варианте осуществления изобретения определение факта, произошел ли сбой в первом рабочем механизме 310, осуществляется на основе степени нажатия педали 91 сцепления, полученной на основе выходного сигнала от датчика 201 хода педали сцепления, хода сцепления сцепляющего устройства 2, полученного на основе выходного сигнала от датчика 206 хода сцепления, хода сцепления привода 8 сцепления, полученного на основе выходного сигнала от датчика 207 хода привода, хода главного цилиндра 92 сцепления, полученного на основе выходного сигнала от датчика 208 хода главного цилиндра, и положения поршня-приемника 93а давления, полученного на основе выходного сигнала от датчика 209 хода создания реакции. Т.е., когда отсутствует сбой в работе первого рабочего механизма 310, отсутствует какое-либо отклонение, превышающее заранее заданный допустимый диапазон среди блоков информации, получаемых на основе выходных данных от этих датчиков, поскольку существует взаимосвязь между этими блоками информации. В связи с этим, когда возникает отклонение, превышающее заранее заданный допустимый диапазон значений этих блоков информации, определяется, что произошел сбой в работе первого рабочего механизма 310. Допустимый диапазон отклонения среди блоков информации задают заранее экспериментальным путем или с использованием моделирования.
[0107] Когда отсутствует сбой в работе первого рабочего механизма 310, переключающий клапан 331В установлен в первое переключающее положение, и работой сцепляющего устройства 2 управляет первый рабочий механизм 310. Т.е. канал для рабочей жидкости, сообщающийся с гидравлической камерой (жидкостная напорная камера) КРЦ 22 является первым каналом 330А. С другой стороны, когда происходит сбой в работе первого рабочего механизма 310, переключающий клапан 331В установлен во второе переключающее положение, и работой сцепляющего устройства 2 управляет второй рабочий механизм 320. Т.е. канал для рабочей жидкости, сообщающийся с гидравлической камерой (жидкостная напорная камера) КРЦ 22 является вторым каналом 330В. Остальные компоненты и операции аналогичны компонентам и операциям варианта осуществления изобретения, раскрытого выше.
[0108] В соответствии с настоящим альтернативным вариантом осуществления изобретения достигнуты те же самые преимущественные технические результаты, как и в варианте осуществления изобретения, раскрытом выше.
Другие варианты осуществления
[0109] Изобретение не ограничено только раскрытым выше вариантом осуществления и альтернативным вариантом осуществления. Изобретение включает в себя любые модификации и области применения, которые включены в объем формулы изобретения и объем эквивалентов формулы изобретения.
[0110] Например, в раскрытом выше варианте осуществления и альтернативном варианте осуществления изобретение применено к переднеприводному автомобилю с передним расположением двигателя. Вместо этого изобретение может быть также применено к заднеприводному автомобилю с передним расположением двигателя, или с расположением двигателя между осями. В примере рассмотрена коробка 3 передач, представляющая собой шестиступенчатую коробку передач, однако, изобретение не ограничено этой конфигурацией. Может быть использовано любое количество передач.
[0111] В раскрытом выше варианте осуществления изобретения и альтернативном варианте осуществления изобретения, рассмотрен двигатель внутреннего сгорания, представляющий собой бензиновый двигатель. Изобретение не ограничено этой конфигурацией. Двигателем внутреннего сгорания может быть другой двигатель внутреннего сгорания, например дизельный двигатель.
[0112] В раскрытом выше варианте осуществления изобретения и альтернативном варианте осуществления изобретения червячный винт 82 и червячное колесо 83 представлены в качестве редукторного механизма привода 8 сцепления. Изобретение не ограничено этой конфигурацией. Может быть использована другая конфигурация редукторного механизма.
[0113] В раскрытом выше варианте осуществления изобретения и альтернативном варианте осуществления изобретения раскрыто сцепляющее устройство 2, работающее с использованием КРЦ 22. Изобретение не ограничено этой конфигурацией. Изобретение может быть также применено к известному сцепляющему устройству с выжимной вилкой, в которой выжимная вилка перемещает выжимной подшипник.
[0114] Изобретение может быть применено для управления автомобилем, который способен двигаться в режиме наката при расцеплении сцепляющего устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2677001C1 |
| УСТРОЙСТВО СОЕДИНЕНИЯ/РАЗЪЕДИНЕНИЯ ДЛЯ СЦЕПЛЕНИЯ | 2018 |
|
RU2693611C1 |
| СОЕДИНИТЕЛЬНОЕ И РАЗЪЕДИНИТЕЛЬНОЕ УСТРОЙСТВО МУФТЫ СЦЕПЛЕНИЯ | 2019 |
|
RU2711521C1 |
| ОПРЕДЕЛЕНИЕ СТАРТА АВТОМОБИЛЯ | 2011 |
|
RU2581609C2 |
| АДАПТАЦИЯ И ОПРЕДЕЛЕНИЕ СТАРТА АВТОМОБИЛЯ | 2011 |
|
RU2573189C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2011 |
|
RU2561658C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2017 |
|
RU2723009C2 |
| СПОСОБ ЗАПУСКА И ОСТАНОВКИ ДВИГАТЕЛЯ И СИСТЕМА ДВИГАТЕЛЯ | 2012 |
|
RU2606523C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2646780C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2610927C1 |



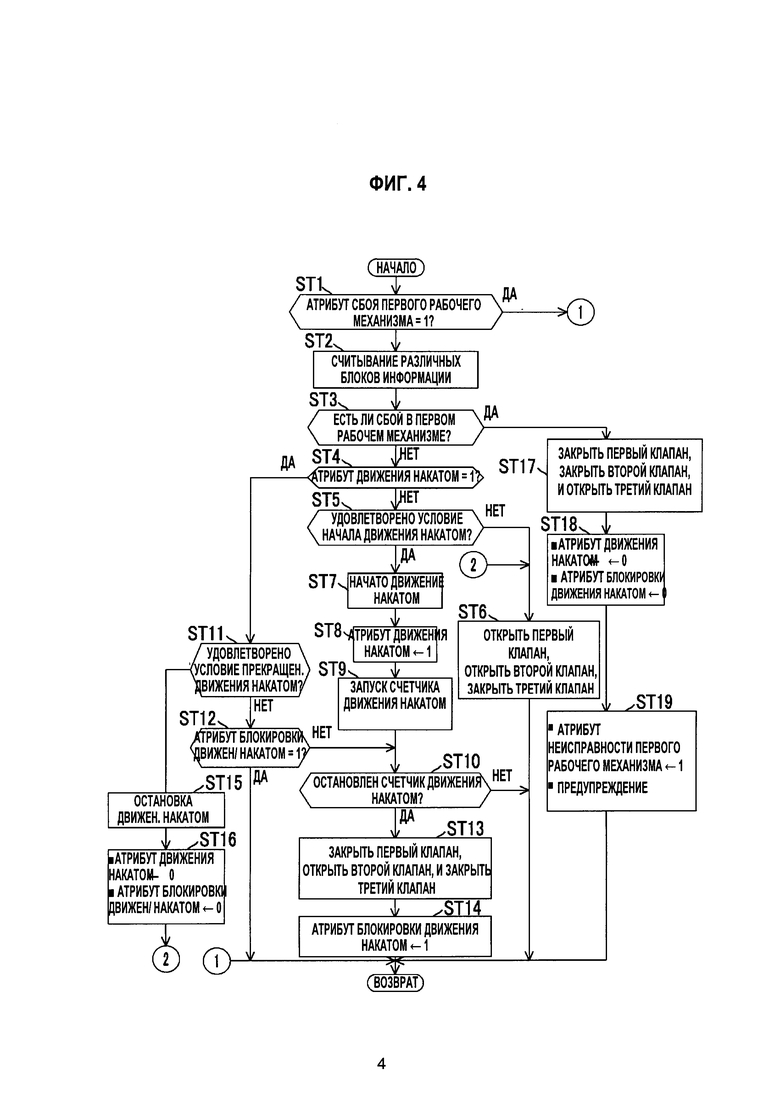


Группа изобретений относится к устройству управления сцеплением и к способу управления для устройства управления сцеплением. Устройство управления сцеплением выполнено с возможностью управления сцепляющим устройством между состоянием зацепления и состоянием расцепления посредством регулирования давления жидкости внутри жидкостной напорной камеры сцепляющего устройства. Сцепляющее устройство расположено на пути передачи мощности между двигателем и коробкой передач. Устройство управления сцеплением содержит привод сцепления, педаль сцепления, первый канал, второй канал, переключающий механизм, электронный блок управления. Первый канал выполнен с возможностью регулирования давления жидкости путем направления течения рабочей жидкости в жидкостную напорную камеру или из жидкостной напорной камеры за счет работы привода сцепления. Второй канал выполнен с возможностью регулирования давления жидкости путем направления течения рабочей жидкости в жидкостную напорную камеру или из жидкостной напорной камеры за счет управляющего усилия, создаваемого нажатием педали сцепления. Переключающий механизм выполнен с возможностью переключения канала рабочей жидкости, сообщающегося с жидкостной напорной камерой, между первым и вторым каналами. Электронный блок управления, выполнен с возможностью управления переключающим механизмом так, чтобы переключать канал рабочей жидкости, сообщающийся с жидкостной напорной камерой, с первого канала на второй канал, когда электронный блок управления определяет наличие нарушения в работе привода сцепления. Устройство управления сцеплением позволяет сцепляющему устройству работать в соответствии со степенью нажатия педали сцепления даже в случае нарушения работы привода сцепления. 2 н. и 4 з.п. ф-лы, 6 ил.
1. Устройство управления сцеплением, выполненное с возможностью управления сцепляющим устройством между состоянием зацепления и состоянием расцепления посредством регулирования давления жидкости внутри жидкостной напорной камеры сцепляющего устройства, при этом сцепляющее устройство расположено на пути передачи мощности между двигателем и коробкой передач, при этом устройство управления сцеплением содержит:
привод сцепления;
педаль сцепления, выполненную с возможностью ее нажатия водителем;
первый канал, выполненный с возможностью регулирования давления жидкости путем направления течения рабочей жидкости в жидкостную напорную камеру или из жидкостной напорной камеры за счет работы привода сцепления;
второй канал, выполненный с возможностью регулирования давления жидкости путем направления течения рабочей жидкости в жидкостную напорную камеру или из жидкостной напорной камеры за счет управляющего усилия, создаваемого нажатием педали сцепления;
переключающий механизм, выполненный с возможностью переключения канала рабочей жидкости, сообщающегося с жидкостной напорной камерой, между первым каналом и вторым каналом; и
электронный блок управления, выполненный с возможностью такого управления переключающим механизмом, чтобы переключать канал рабочей жидкости, сообщающийся с жидкостной напорной камерой, с первого канала на второй канал, когда электронный блок управления определяет наличие нарушения в работе привода сцепления.
2. Устройство управления сцеплением по п. 1, дополнительно содержащее:
механизм создания реакции, выполненный с возможностью создания реактивного усилия, действующего против управляющего усилия, на педаль сцепления с использованием потока рабочей жидкости; и
третий канал, выполненный с возможностью направления течения рабочей жидкости в механизм создания реакции или из механизма создания реакции с использованием управляющего усилия на педаль сцепления, при этом
переключающий механизм выполнен с возможностью переключения третьего канала между сообщающимся состоянием и прерванным состоянием, и
электронный блок управления, выполненный с возможностью такого управления переключающим механизмом, чтобы переключать третий канал из сообщающегося состояния в прерванное состояние, когда электронный блок управления определяет наличие нарушения в работе привода сцепления.
3. Устройство управления сцеплением по п. 2, в котором
переключающий механизм содержит первое отверстие, второе отверстие, третье отверстие и четвертое отверстие, при этом
первое отверстие соединено с приводом сцепления через канал для рабочей жидкости,
второе отверстие соединено с педалью сцепления через канал для рабочей жидкости,
третье отверстие соединено с механизмом создания реакции через канал для рабочей жидкости,
четвертое отверстие соединено с жидкостной напорной камерой сцепляющего устройства через канал для рабочей жидкости, и
электронный блок управления выполнен с возможностью сообщать
четвертое отверстие с первым отверстием и сообщать второе отверстие с третьим отверстием, когда электронный блок управления определяет отсутствие нарушения в работе привода сцепления, и
электронный блок управления выполнен с возможностью сообщать четвертое отверстие со вторым отверстием и прерывать сообщение каждого из первого и второго отверстия с другими отверстиями, когда электронный блок управления определяет наличие нарушения в работе привода сцепления.
4. Устройство управления сцеплением по п.п. 1 или 2, в котором
электронный блок управления выполнен с возможностью расцепления сцепляющего устройства, осуществляя управление приводом сцепления, если удовлетворено заранее заданное условие начала движения накатом, когда движение автомобиля происходит в ситуации, в которой сцепляющее устройство находится в состоянии зацепления, когда сцепляющее устройство управляется при сообщении первого канала с жидкостной напорной камерой, и
электронный блок управления выполнен с возможностью такого переключения переключающего механизма, чтобы прерывать сообщение первого канала, когда движение накатом продолжено в течение заранее заданного периода времени после начала движения автомобиля накатом.
5. Устройство управления сцеплением по п. 1 или 2, дополнительно содержащее:
датчик хода педали сцепления, выполненный с возможностью выдачи сигнала, соответствующего степени нажатия педали сцепления;
датчик хода сцепления, выполненный с возможностью выдачи сигнала, соответствующего ходу сцепления сцепляющего устройства;
датчик хода привода, выполненный с возможностью выдачи сигнала, соответствующего ходу сцепления привода сцепления;
датчик хода главного цилиндра, выполненный с возможностью выдачи сигнала, соответствующего ходу главного цилиндра сцепления, соединенного с педалью сцепления; и
датчик хода создания реакции, выполненный с возможностью выдачи сигнала, соответствующего ходу механизма создания реакции, при этом
электронный блок управления выполнен с возможностью при возникновении отклонения, превышающего заранее заданный допустимый диапазон значений сигналов, выдаваемых каждым из датчиков хода, установления факта возникновения нарушения в работе привода сцепления.
6. Способ управления для устройства управления сцеплением, предназначенный для управления сцепляющим устройством между состоянием зацепления и состоянием расцепления посредством регулирования давления жидкости внутри жидкостной напорной камеры сцепляющего устройства, при этом сцепляющее устройство расположено на пути передачи мощности между двигателем и коробкой передач, а устройство управления сцеплением содержит:
привод сцепления;
педаль сцепления, выполненную с возможностью ее нажатия водителем;
первый канал, выполненный с возможностью регулирования давления жидкости путем направления течения рабочей жидкости в жидкостную напорную камеру или из жидкостной напорной камеры за счет работы привода сцепления;
второй канал, выполненный с возможностью регулирования давления жидкости путем направления течения рабочей жидкости в жидкостную напорную камеру или из жидкостной напорной камеры за счет управляющего усилия, создаваемого нажатием педали сцепления;
переключающий механизм, выполненный с возможностью переключения канала рабочей жидкости, сообщающегося с жидкостной напорной камерой, между первым каналом и вторым каналом; и
электронный блок управления, при этом
способ управления включает в себя
выполнение электронным блоком управления такого управления переключающим механизмом, чтобы переключать канал рабочей жидкости, сообщающийся с жидкостной напорной камерой, с первого канала на второй канал, когда электронный блок управления определяет наличие нарушения в работе привода сцепления.
| JP H08135693 A, 31.05.1996 | |||
| JP 2009222068 A, 01.10.2009 | |||
| JP S6011756 A, 22.01.1985. |

