Область техники
Изобретение относится к устройству управления транспортным средством.
Уровень техники
Традиционно известно транспортное средство, в котором коммутируемый реактивный электромотор монтируется в качестве источника приведения в движение. В качестве технологии для управления коммутируемым реактивным электромотором в таком транспортном средстве, например, публикация заявки на патент Японии № 2012-90462 (JP 2012-90462 А) раскрывает технологию устройства управления электромотора, которая изменяет заданный угол (начальную точку уменьшения частоты вращения) в соответствии с напряжением питания электромотора (коммутируемого реактивного электромотора) или температурой обмотки (сопротивлением потока тока приведения в действие электромотора) в случае, когда частота вращения электромотора уменьшается после того, как угол поворота электромотора оказывается в пределах указанного диапазона относительно целевого угла поворота.
Когда выполняется управление для остановки коммутируемого реактивного электромотора при целевом угле поворота, коммутируемый реактивный электромотор не обязательно останавливается при целевом угле поворота. Помимо этого, имеется вероятность того, что угол поворота коммутируемого реактивного электромотора во время начала движения отличается от целевого угла поворота, поскольку позиция остановки коммутируемого реактивного электромотора изменяется после остановки вследствие возмущений и т.п. Максимальный крутящий момент, который может выводиться посредством коммутируемого реактивного электромотора, отличается в соответствии с углом поворота. Соответственно, в случае, если угол поворота коммутируемого реактивного электромотора во время начала движения транспортного средства является углом поворота, при котором не может выводиться достаточный крутящий момент, возможно, ухудшается эффективность трогания с места.
Сущность изобретения
С учетом вышеизложенной проблемы, согласно изобретению создано устройство управления транспортным средством, которое может улучшать эффективность трогания с места транспортного средства, в котором монтируется коммутируемый реактивный электромотор.
Таким образом, согласно одному аспекту изобретения, предусмотрено устройство управления транспортным средством, которое включает в себя коммутируемый реактивный электромотор и электронный модуль управления. Коммутируемый реактивный электромотор имеет ротор и статор и монтируется в качестве источника приведения в движение для обеспечения движения в транспортном средстве. Электронный модуль управления выполнен с возможностью осуществлять управление по току коммутируемого реактивного электромотора. Электронный модуль управления выполнен с возможностью: (i) выполнять первое управление по току, причем первое управление по току инструктирует ротору вращаться в обратном направлении относительно направления вращения, в котором транспортное средство начинает движение, в случае, если транспортное средство не начинает движение даже тогда, когда коммутируемый реактивный электромотор выводит максимальный крутящий момент, который может выводиться посредством нормального управления по току; и (ii) выполнять управление для инструктирования ротору вращаться в направлении вращения, в котором транспортное средство начинает движение после того, как ротор вращается в обратном направлении посредством первого управления по току в позицию вращения, в которой может выводиться крутящий момент для обеспечения начала движения транспортного средства.
Согласно устройству управления транспортным средством, как описано выше, рабочие характеристики трогания с места транспортного средства могут быть улучшены посредством инструктирования обратного вращения ротора в позицию вращения, в которой может выводиться крутящий момент для обеспечения начала движения транспортного средства посредством первого управления по току.
Помимо этого, в указанном устройстве управления транспортным средством, электронный модуль управления может приоритезировать выполнение второго управления по току относительно выполнения первого управления по току в случае, если транспортное средство не начинает движение за счет максимального крутящего момента, который может выводиться посредством нормального управления по току. Второе управление по току инструктирует коммутируемому реактивному электромотору временно выводить крутящий момент, который соответствует направлению вращения для начала движения транспортного средства и выше максимального крутящего момента, который может выводиться посредством нормального управления по току.
Согласно устройству управления транспортным средством, как описано выше, поскольку выполнение второго управления по току приоритезировано выше относительно выполнения первого управления по току, рабочие характеристики трогания с места транспортного средства могут быть улучшены посредством повышения скорости отклика при трогании с места.
Помимо этого, в вышеуказанном устройстве управления транспортным средством, при первом управлении по току, электронный модуль управления может: (i) прекращать возбуждение коммутируемого реактивного электромотора, и (ii) инструктировать ротору вращаться в обратном направлении посредством силы тяжести, которая действует на транспортное средство.
Согласно устройству управления транспортным средством, как описано выше, ротор может вращаться в обратном направлении в то время, когда потребление электроэнергии подавляется. Таким образом, может достигаться как улучшение рабочих характеристик трогания с места транспортного средства, так и уменьшение расхода топлива.
Помимо этого, в вышеуказанном устройстве управления транспортным средством, при первом управлении по току, электронный модуль управления может: в случае, если ротор не вращается в обратном направлении даже после того, как возбуждение коммутируемого реактивного электромотора прекращено в течение заданного периода: (i) инструктировать коммутируемому реактивному электромотору выводить крутящий момент в обратном направлении, и (ii) инструктировать ротору вращаться в обратном направлении.
Согласно устройству управления транспортным средством, как описано выше, поскольку обратное вращение ротора стимулируется посредством крутящего момента электромотора, рабочие характеристики трогания с места транспортного средства могут быть улучшены посредством регулирования позиции вращения ротора.
Кроме того, в указанном устройстве управления транспортным средством, при первом управлении по току, электронный модуль управления может быть выполнен с возможностью: в случае, если транспортное средство не начинает движение за счет максимального крутящего момента, который может выводиться посредством нормального управления по току, и направление начала движения транспортного средства представляет собой направление подъема: (i) инструктировать коммутируемому реактивному электромотору выводить крутящий момент в обратном направлении, и (ii) инструктировать ротору вращаться в обратном направлении.
Согласно устройству управления транспортным средством, как описано выше, поскольку обратное вращение ротора стимулируется посредством крутящего момента электромотора, может повышаться скорость отклика при трогании с места.
Устройство управления транспортным средством согласно изобретению выполняет первое управление по току для инструктирования ротору вращаться в обратном направлении относительно направления вращения, в котором транспортное средство начинает движение, в случае, если транспортное средство не начинает движение даже тогда, когда коммутируемый реактивный электромотор выводит максимальный крутящий момент, который может выводиться посредством нормального управления по току, и выполняет управление для инструктирования ротору вращаться в направлении вращения, в котором транспортное средство начинает движение после того, как ротор вращается в обратном направлении посредством первого управления по току в позицию вращения, в которой может выводиться крутящий момент для обеспечения начала движения транспортного средства. Устройство управления транспортным средством согласно изобретению демонстрирует такое преимущество, что рабочие характеристики трогания с места транспортного средства могут быть улучшены посредством изменения позиции вращения ротора и за счет этого регулирования максимального крутящего момента, который может выводиться посредством коммутируемого реактивного электромотора.
Краткое описание чертежей
Далее описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичными ссылочными позициями обозначены аналогичные элементы, и на которых:
Фиг. 1 - схема принципиальной конфигурации транспортного средства согласно первому варианту осуществления изобретения;
Фиг. 2 - вид в поперечном сечении главного узла коммутируемого реактивного электромотора согласно первому варианту осуществления изобретения;
Фиг. 3 - блок-схема транспортного средства согласно первому варианту осуществления изобретения;
Фиг. 4 - пояснительная карта первого управления по току согласно управлению по первому варианту осуществления изобретения;
Фиг. 5 - вид начала движения в направлении подъема транспортного средства первого варианта осуществления изобретения;
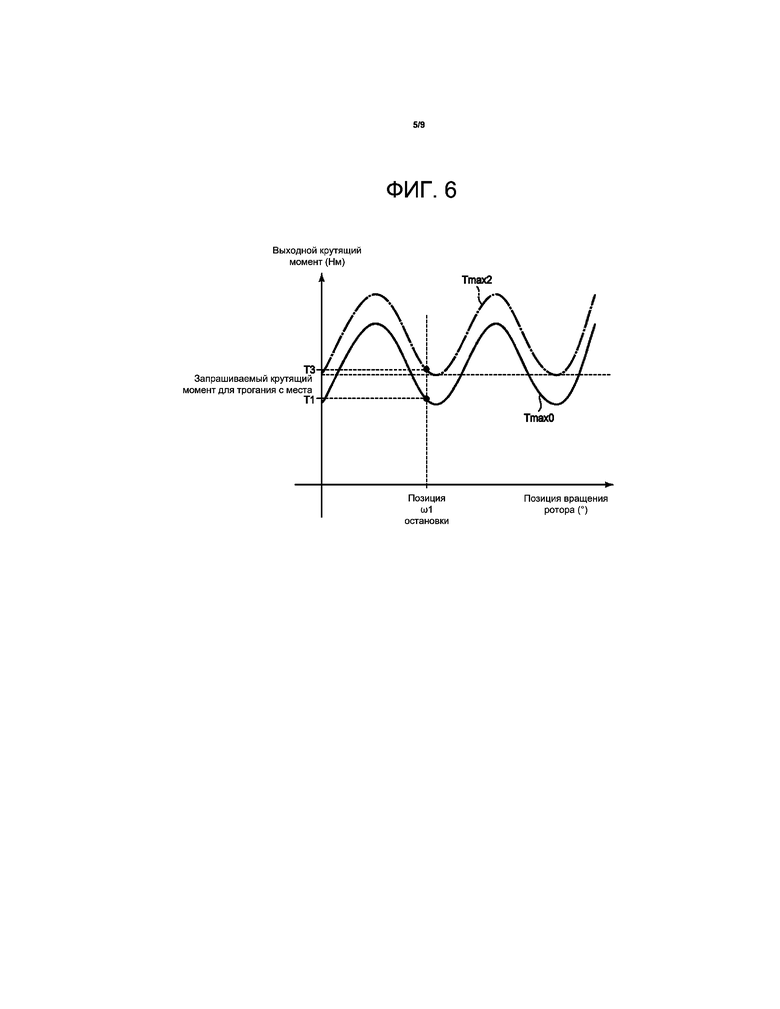
Фиг. 6 - пояснительная карта второго управления по току согласно управлению по первому варианту осуществления изобретения;
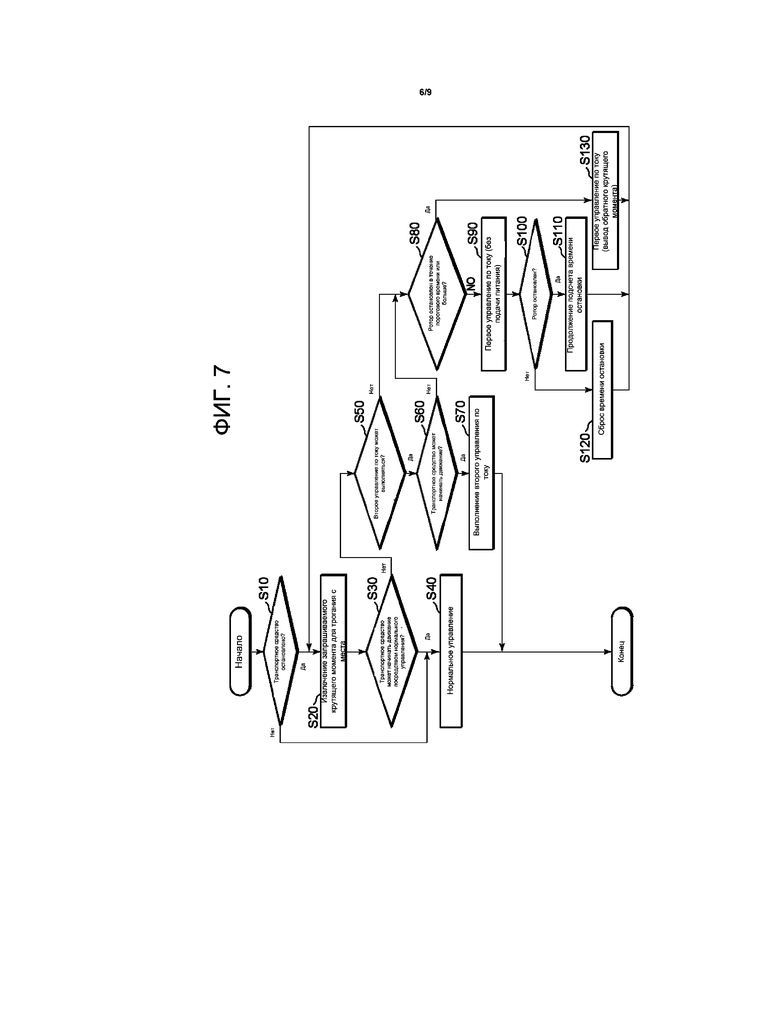
Фиг. 7 - блок-схема последовательности операций способа согласно первому варианту осуществления изобретения;
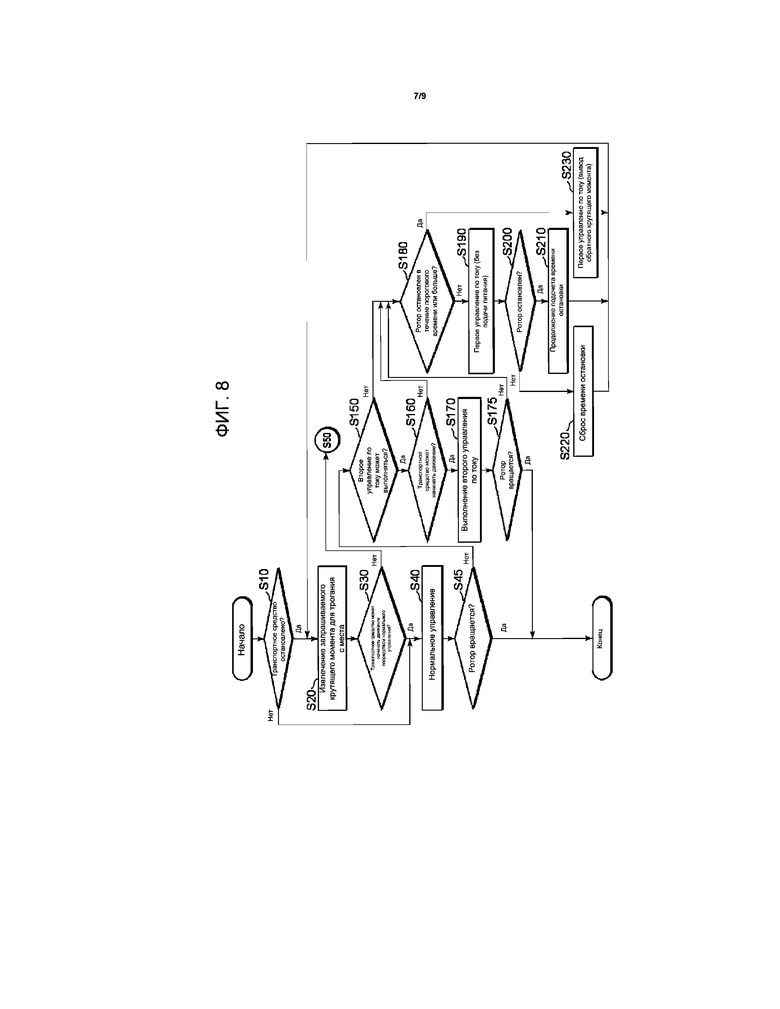
Фиг. 8 - блок-схема последовательности операций способа согласно второму варианту осуществления изобретения;
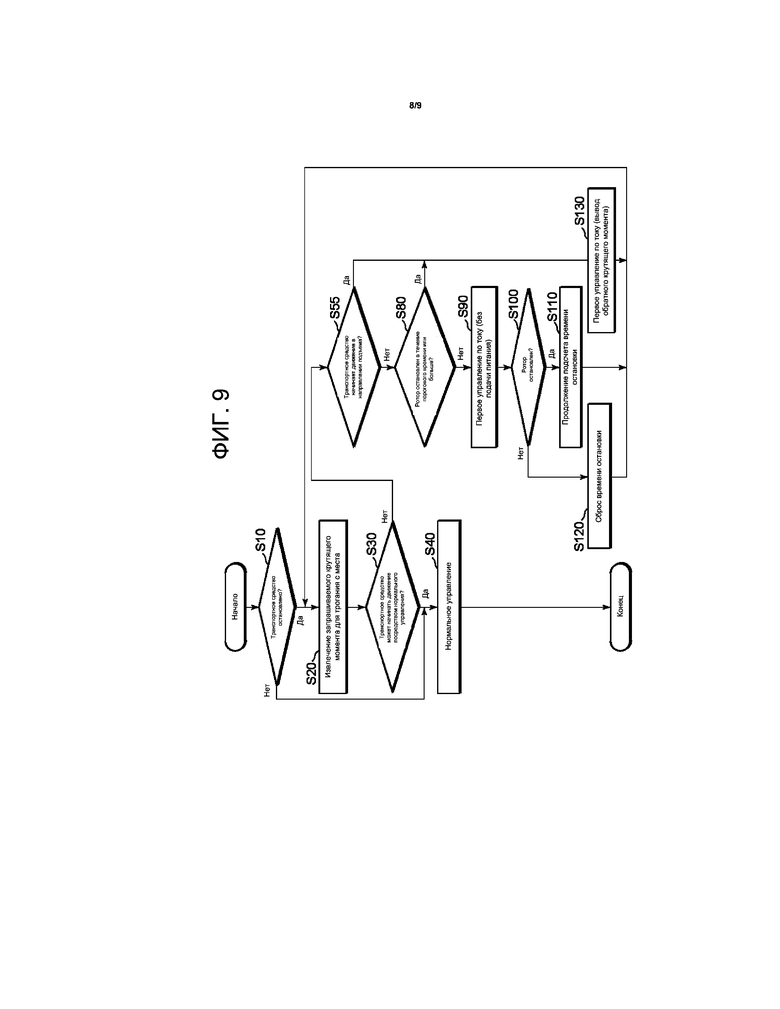
Фиг. 9 - блок-схема последовательности операций способа согласно третьему варианту осуществления изобретения; и
Фиг. 10 - схема принципиальной конфигурации транспортного средства согласно второму модифицированному примеру вариантов осуществления изобретения.
Подробное описание вариантов осуществления изобретения
В дальнейшем в этом документе, приводится подробное описание касательно устройства управления транспортным средством согласно варианту осуществления изобретения со ссылкой на чертежи. Следует отметить, что изобретение не ограничено посредством этого варианта осуществления. Помимо этого, в качестве компонентов в нижеприведенном варианте осуществления включены компоненты, которые могут легко выявляться специалистами в данной области техники, или практически идентичные компоненты.
Ниже описывается первый вариант осуществления со ссылкой на фиг. 1-7. Это вариант осуществления относится к устройству управления транспортным средством. Фиг. 1 является схемой принципиальной конфигурации транспортного средства согласно первому варианту осуществления изобретения, фиг. 2 является видом в поперечном сечении главного узла коммутируемого реактивного электромотора согласно первому варианту осуществления, фиг. 3 является блок-схемой транспортного средства согласно первому варианту осуществления, фиг. 4 является пояснительной картой первого управления по току, фиг. 5 является видом начала движения в направлении подъема, фиг. 6 является пояснительной картой второго управления по току, и фиг. 7 является блок-схемой последовательности операций способа согласно первому варианту осуществления.
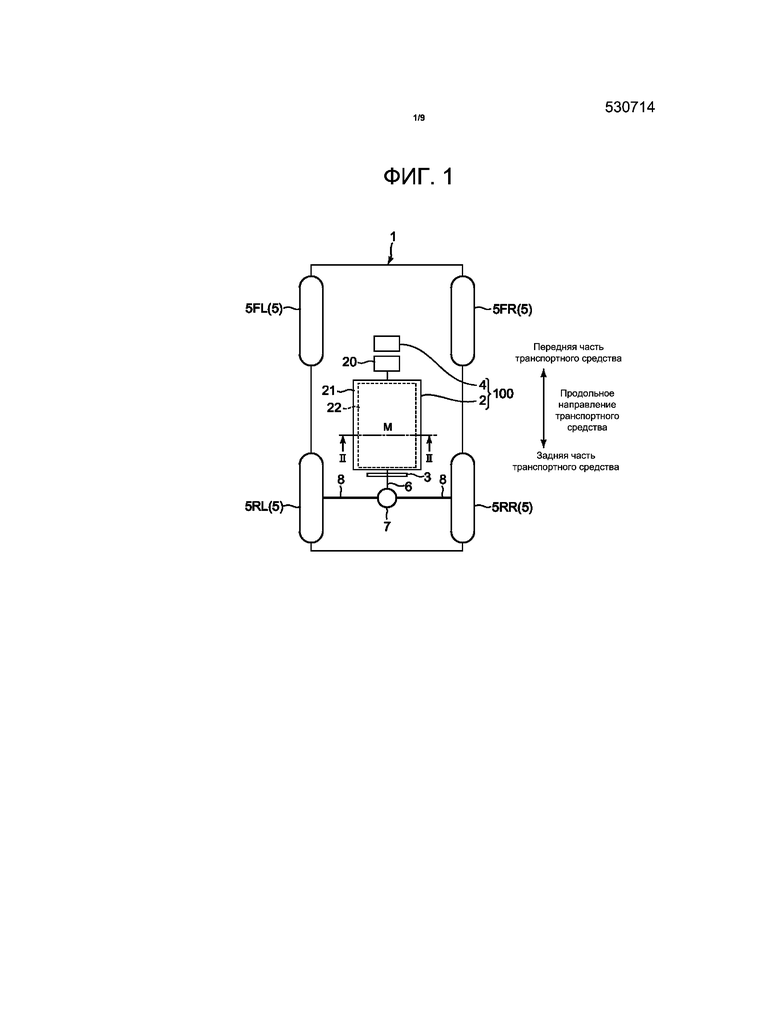
Как показано на фиг. 1, транспортное средство 1 включает в себя устройство 100 управления транспортным средством, колеса 5 транспортного средства и аккумулятор 20. Транспортное средство 1 имеет четыре колеса 5 транспортного средства (переднее левое колесо 5FL, переднее правое колесо 5FR, заднее левое колесо 5RL и заднее правое колесо 5RR). Левое и правое задние колеса 5RL, 5RR представляют собой ведущие колеса. Левое и правое передние колеса 5FL, 5FR представляют собой ведомые колеса. Устройство 100 управления транспортным средством по этому варианту осуществления включает в себя коммутируемый реактивный электромотор 2 (SR-электромотор) и электронный модуль 4 управления (ЭМУ) (далее - "ЭМУ 4"). Устройство 100 управления транспортным средством дополнительно может включать в себя узел 3 определения позиции.
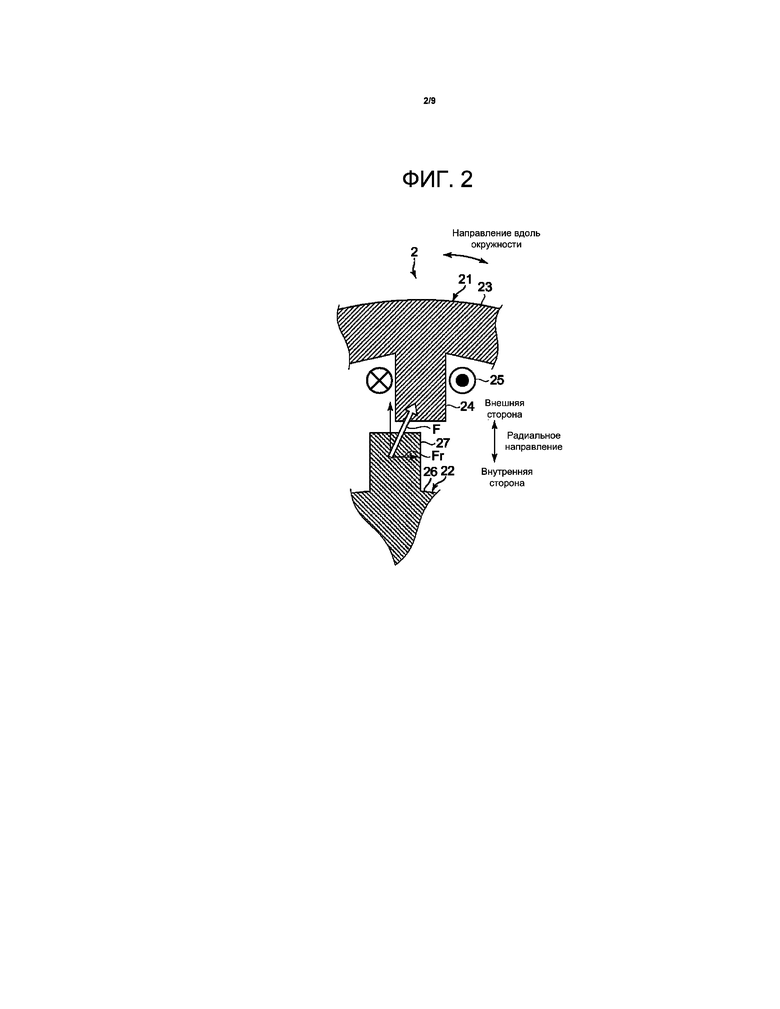
SR-электромотор 2 монтируется в качестве источника приведения в движение для обеспечения движения в транспортном средстве 1. SR-электромотор 2 соединяется с аккумулятором 20. SR-электромотор 2 имеет функцию в качестве электромотора, который преобразует электроэнергию, поданную из аккумулятора 20, в крутящий момент, и функцию в качестве генератора, который преобразует передаваемый крутящий момент в электроэнергию и накапливает электроэнергию в аккумуляторе 20. Как показано на фиг. 2, SR-электромотор 2 включает в себя статор 21 и ротор 22. Статор 21 крепится без возможности вращения на кузове транспортного средства. Статор 21 имеет цилиндрический основной корпус 23 статора. Несколько выступающих полюсов 24, каждый из которых состоит из магнитного тела, предоставляются на внутренней периферийной поверхности основного корпуса 23 статора. Выступающий полюс 24 выступает из основного корпуса 23 статора к радиально внутренней стороне основного корпуса 23 статора. Выступающие полюса 24 размещаются с указанными интервалами вдоль направления вдоль окружности, например, с равноотстоящими интервалами. Катушка 25 наматывается вокруг каждого из выступающих полюсов 24.
Ротор 22 имеет цилиндрический основной корпус 26 ротора. Несколько выступающих полюсов 27, каждый из которых состоит из магнитного тела, предоставляются на внешней периферийной поверхности основного корпуса 26 ротора. Выступающий полюс 27 выступает из основного корпуса 26 ротора к радиально внешней стороне основного корпуса 26 ротора. Выступающие полюса 27 размещаются с указанными интервалами вдоль направления вдоль окружности, например, с равноотстоящими интервалами. Ротор 22 размещается в статоре 21 таким образом, что центральная ось статора 21 совпадает с центральной осью ротора 22. Ротор 22 поддерживается посредством подшипника способом, допускающим свободное вращение относительно статора 21.
Когда ток протекает через катушку 25 определенного выступающего полюса 24 в статоре 21, всасывающая сила F формируется между выступающим полюсом 24 и выступающим полюсом 27 ротора 22 вследствие магнитного потока, который формируется между выступающим полюсом 24 и выступающим полюсом 27 посредством тока. Компонент Fr в направлении вдоль окружности всасывающей силы F становится вращающей силой для вращения ротора 22. SR-электромотор 2 имеет схему управления для управления временем подачи питания и величиной подаваемого питания относительно каждой катушки 25. Схема управления выполняет управление подачей питания каждой катушки 25 в ответ на команду из ЭМУ 4. Катушка 25, в которую подается питание, надлежащим образом коммутируется в соответствии с позицией вращения ротора 22, и ротор 22 за счет этого вращательно приводится в действие. Помимо этого, величина подаваемого питания каждой катушки 25 регулируется в соответствии со значением команды управления выходного крутящего момента SR-электромотора 2.
Возвращаясь к фиг. 1, вращательный вал 6 ротора 22 соединяется с дифференциальной коробкой 7 передач. Дифференциальная коробка 7 передач, соответственно, соединяется с задними колесами 5RL, 5RR через левый и правый ведущие валы 8. Ротор 22 механически зацепляется с задними колесами 5RL, 5RR через дифференциальную коробку 7 передач и ведущие валы 8 и вращается взаимосвязано с задними колесами 5RL, 5RR. Вращение ротора 22, по меньшей мере, замедляется в дифференциальной коробке 7 передач и передается на задние колеса 5RL, 5RR. Узел 3 определения позиции определяет позицию вращения ротора 22. Узел 3 определения позиции по этому варианту осуществления представляет собой круговой датчик позиции и может определять позицию вращения ротора 22 с высокой точностью.
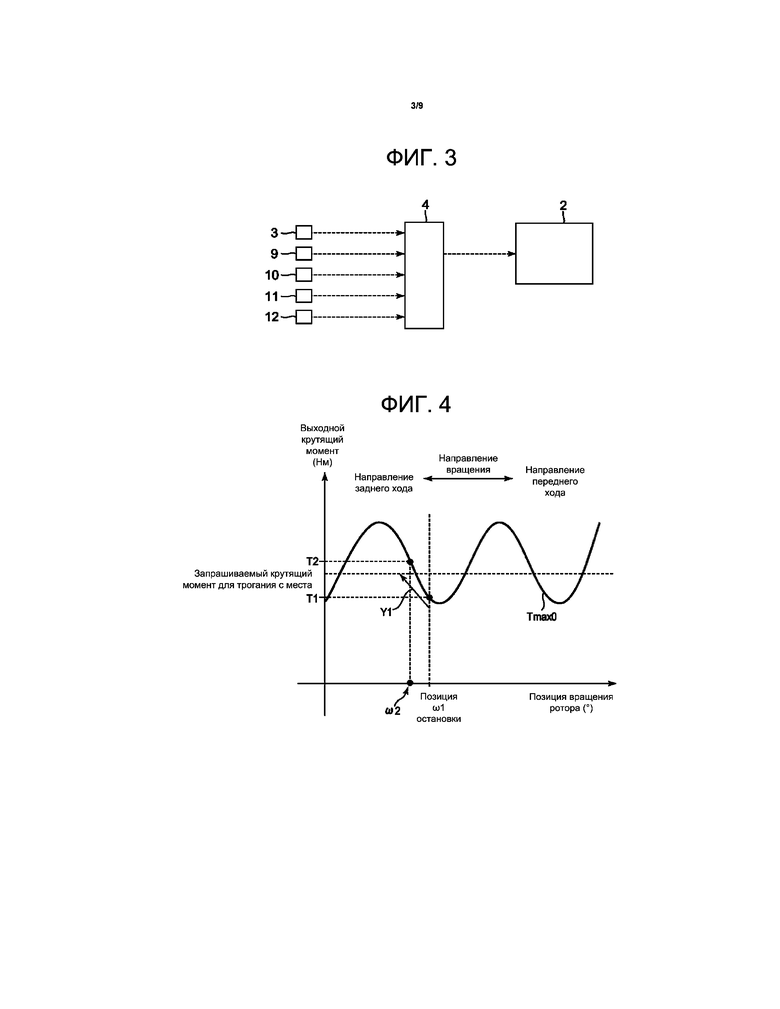
Как показано на фиг. 3, ЭМУ 4 соединяется с узлом 3 определения позиции, датчиком 9 скорости транспортного средства, датчиком 10 градиента, датчиком 11 рабочей величины нажатия педали акселератора и датчиком 12 позиции переключения коробки передач. Датчик 9 скорости транспортного средства определяет скорость движения транспортного средства 1. Датчик 10 градиента определяет градиент поверхности дороги в продольном направлении транспортного средства. Датчик 10 градиента представляет собой, например, датчик ускорения, который определяет угол наклона переднезаднего вала транспортного средства относительно горизонтального направления. Датчик 11 рабочей величины нажатия педали акселератора определяет величину нажатия педали акселератора водителем. Датчик 12 позиции переключения коробки передач определяет операцию переключения передач водителем относительно рабочего элемента ввода, такого как рычаг переключения передач. Датчик 12 позиции переключения коробки передач определяет диапазон переключения передач, запрашиваемый водителем, например, посредством определения позиции переключения рычага переключения передач. Диапазон переднего хода, включающий в себя D-диапазон, диапазон заднего хода (R), диапазон нейтрали, диапазон парковки и т.п., например, включены в диапазоны переключения передач. Сигналы, указывающие результаты определения узла 3 определения позиции, датчика 9 скорости транспортного средства, датчика 10 градиента, датчика 11 рабочей величины нажатия педали акселератора и датчика 12 позиции переключения коробки передач, выводятся в ЭМУ 4.
ЭМУ 4 представляет собой узел управления для управления транспортным средством 1 и, например, представляет собой электронный модуль управления. ЭМУ 4 вычисляет запрашиваемую величину ускорения водителем относительно транспортного средства 1 на основе операции ускорения водителем. ЭМУ 4 по этому варианту осуществления вычисляет запрашиваемое ускорение в качестве одной из запрашиваемых величин ускорения. Запрашиваемое ускорение вычисляется, например, из рабочей величины нажатия педали акселератора и скорости транспортного средства. ЭМУ 4 вычисляет запрашиваемый крутящий момент относительно SR-электромотора 2 из запрашиваемого ускорения. Следует отметить, что значение крутящего момента в этом варианте осуществления является значением, которое преобразуется в крутящий момент на ведущих валах 8. Транспортное средство 1 по этому варианту осуществления имеет SR-электромотор 2 в качестве только одного источника приведения в движение для обеспечения движения. Соответственно, запрашиваемый крутящий момент относительно SR-электромотора 2 определяется таким образом, что ускорение транспортного средства 1 совпадает с запрашиваемым ускорением посредством выходного крутящего момента SR-электромотора 2. В нижеприведенном описании, запрашиваемый крутящий момент относительно SR-электромотора 2, который соответствует запрашиваемому ускорению водителем, также упоминается как "запрашиваемый крутящий момент электромотора".
ЭМУ 4 выполняет управление по току SR-электромотора 2 на основе запрашиваемого крутящего момента электромотора. ЭМУ 4 по этому варианту осуществления определяет величину подаваемого питания каждой катушки 25 на основе запрашиваемого крутящего момента электромотора и позиции вращения ротора 22, которая определяется посредством узла 3 определения позиции, и командует определенную величину подаваемого питания в SR-электромотор 2. Схема управления SR-электромотора 2 управляет величиной подаваемого питания каждой катушки 25 в соответствии со значением команды управления величиной подаваемого питания. Схема управления управляет значением тока, поданным из аккумулятора 20 в каждую катушку 25, например, посредством управления с широтно-импульсной модуляцией (PWM).
В этом варианте осуществления, направления вращения ротора 22 SR-электромотора 2 упоминаются следующим образом. Направление вращения при переднем ходе: направление крутящего момента электромотора, который приводит в движение транспортное средство 1 в направлении передней части транспортного средства. Направление вращения при заднем ходе: направление крутящего момента электромотора, который приводит в движение транспортное средство 1 в направлении задней части транспортного средства. Другими словами, направление вращения ротора 22 в то время, когда транспортное средство 1 движется передним ходом (движется в направлении к передней части транспортного средства), представляет собой направление вращения при переднем ходе. С другой стороны, направление вращения ротора 22 в то время, когда транспортное средство 1 движется задним ходом (движется в направлении к задней части транспортного средства), представляет собой направление вращения при заднем ходе.
Помимо этого, независимо от направления движения транспортного средства 1, направление крутящего момента, который формирует мощность приведения в движение в направлении движения транспортного средства 1, запрашиваемом водителем, упоминается в качестве "положительного направления", а противоположное направление относительно положительного направления упоминается в качестве "обратного направления". Например, когда передний ход запрашивается водителем, направление крутящего момента, который формирует мощность приведения в движение в направлении переднего хода для транспортного средства 1, становится положительным направлением, а направление крутящего момента, который формирует мощность приведения в движение в направлении заднего хода для транспортного средства 1, становится обратным направлением. Между тем, когда задний ход запрашивается водителем, направление крутящего момента, который формирует мощность приведения в движение в направлении заднего хода для транспортного средства 1, становится положительным направлением, а противоположное направление относительно него становится обратным направлением. Соответственно, когда начало движения в направлении переднего хода запрашивается водителем в состоянии остановки, направление крутящего момента, который формирует мощность приведения в движение при переднем ходе, представляет собой направление положительного вращения ротора 22.
Как показано на фиг. 2, в SR-электромоторе 2, компонент Fr в направлении вдоль окружности всасывающей силы F между выступающим полюсом 24 статора 21 и выступающим полюсом 27 ротора 22 становится вращающей силой ротора 22. Соответственно, абсолютная величина вращающей силы изменяется в соответствии с относительной позицией в направлении вдоль окружности между выступающим полюсом 24 и выступающим полюсом 27. Другими словами, даже когда величина подаваемого питания катушки 25 является идентичной, абсолютная величина сформированного крутящего момента изменяется в соответствии с позицией вращения ротора 22.
Фиг. 4 показывает взаимосвязь между нормальным максимальным крутящим моментом Tmax0 SR-электромотора 2 и позицией вращения ротора 22. На фиг. 4, горизонтальная ось указывает позицию (ω) вращения ротора 22, а вертикальная ось указывает выходной крутящий момент (Nm) SR-электромотора 2. Как показано на фиг. 4, абсолютная величина нормального максимального крутящего момента Tmax0 периодически изменяется в соответствии с позицией вращения. Нормальный максимальный крутящий момент Tmax0 является максимальным крутящим моментом в пределах допустимого диапазона при нормальном управлении SR-электромотора 2. Нормальное управление представляет собой управление по току относительно SR-электромотора 2 и представляет собой управление, отличное первого управления по току и второго управления по току, которые описываются ниже. Нормальное управление представляет собой управление по току, выполняемое на основе максимального значения тока, которое нормально использовано в ходе движения, и представляет собой управление, которое выполняется в оптимальном диапазоне тока, для которого учитываются, например, износостойкость SR-электромотора 2 и износостойкость аккумулятора 20. При нормальном управлении, допустимое максимальное значение тока, которое подается в SR-электромотор 2, определяется заранее. В нижеприведенном описании, допустимое максимальное значение тока при нормальном управлении упоминается в качестве "нормального максимального значения Imax0 тока". Нормальный максимальный крутящий момент Tmax0 является крутящим моментом, выводимым посредством SR-электромотора 2, когда нормальное максимальное значение Imax0 тока подается в SR-электромотор 2.
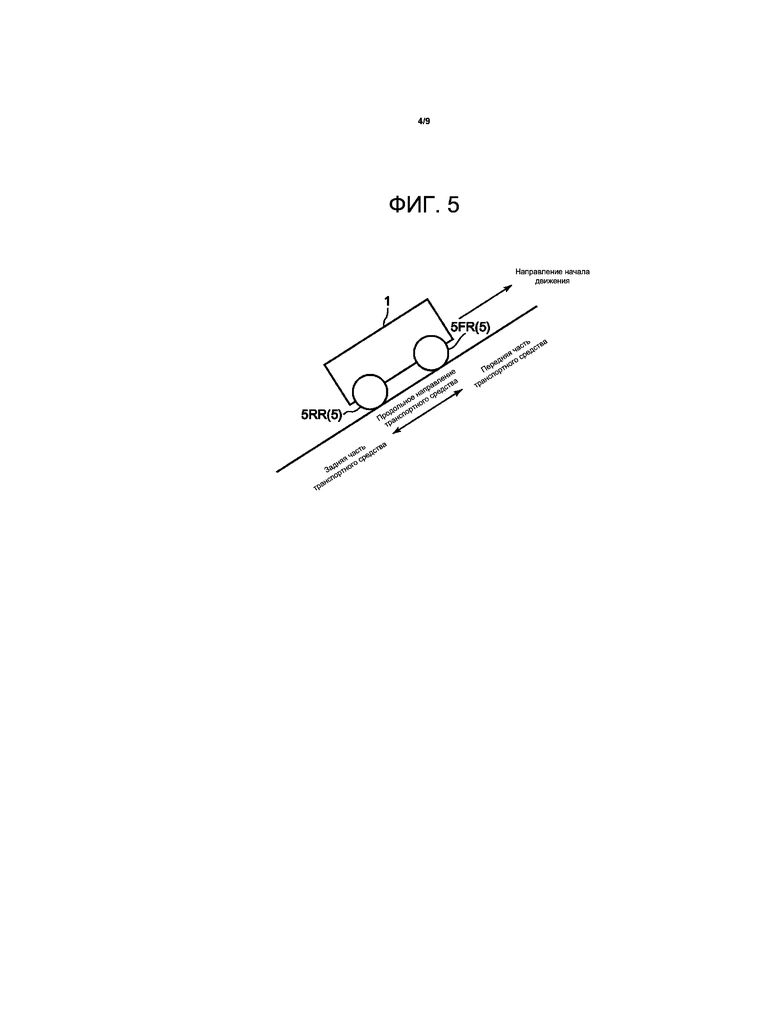
Предусмотрен случай, в котором крутящий момент, требуемый для того, чтобы начинать движение транспортного средства 1, становится высоким значением, к примеру, случай, в котором транспортное средство начинает движение в направлении подъема на дороге с уклоном, как показано на фиг. 5. Как описано выше, абсолютная величина нормального максимального крутящего момента Tmax0 отличается в соответствии с позицией вращения ротора 22. Таким образом, в зависимости от позиции вращения ротора 22 при остановке, имеется вероятность того, что абсолютная величина нормального максимального крутящего момента Tmax0 становится меньше абсолютной величины крутящего момента, требуемой для начала движения (в дальнейшем в этом документе просто называется "запрашиваемым крутящим моментом для трогания с места"). Например, в случае, если ротор 22 остановлен в позиции ω1 вращения (в дальнейшем называется "позицией ω1 остановки"), показанной на фиг. 4, абсолютная величина максимального крутящего момента, который SR-электромотору 2 разрешается выводить при нормальном управлении, составляет T1 и меньше абсолютной величины запрашиваемого крутящего момента для трогания с места, показанной на фиг. 4.
Устройство 100 управления транспортным средством по этому варианту осуществления увеличивает крутящий момент, который может выводиться посредством SR-электромотора 2 посредством первого управления по току и второго управления по току, которые описываются ниже, и за счет этого улучшает рабочие характеристики трогания с места транспортного средства 1.
Ниже описывается первое управление по току со ссылкой на фиг. 4. Первое управление по току представляет собой управление для инструктирования временного обратного вращения ротора 22, когда запрашивается начало движения транспортного средства 1 в направлении подъема. Другими словами, первое управление по току представляет собой управление по току для инструктирования ротору 22 вращаться в противоположном направлении (направлении обратного вращения) относительно направления вращения, чтобы начинать движение транспортного средства 1. Первое управление по току по этому варианту осуществления включает в себя управление выводом обратного крутящего момента для инструктирования обратного вращения SR-электромотора 2 посредством инструктирования SR-электромотору 2 формировать крутящий момент в направлении обратного вращения и управление без подачи питания для инструктирования обратного вращения SR-электромотора 2 посредством силы тяжести, которая действует на транспортное средство 1 в качестве состояния, в котором в SR-электромотор 2 не подается питание, и в силу этого SR-электромотор 2 не формирует крутящий момент. Когда транспортное средство 1 движется передним ходом, позиция вращения ротора 22 изменяется в направлении вращения при переднем ходе (в направлении вправо на фиг. 4) в ответ на передний ход транспортного средства 1. В случае, если транспортное средство 1 начинает движение в направлении переднего хода, и абсолютная величина T1 нормального максимального крутящего момента Tmax0 в позиции ω1 остановки меньше абсолютной величины запрашиваемого крутящего момента для трогания с места, ЭМУ 4 инструктирует ротору 22 вращаться в направлении вращения при заднем ходе посредством первого управления по току, как указано посредством стрелки Y1. Абсолютная величина нормального максимального крутящего момента Tmax0 изменяется посредством изменения позиции вращения ротора 22. Когда абсолютная величина нормального максимального крутящего момента Tmax0, которая соответствует позиции вращения ротора 22, становится запрашиваемым крутящим моментом для трогания с места или больше, ЭМУ 4 завершает первое управление по току в позиции вращения и выполняет управление для инструктирования SR-электромотору 2 формировать крутящий момент в направлении вращения при переднем ходе.
Например, предполагается, что позиция вращения ротора 22 становится позицией ω2 посредством первого управления по току. В позиции ω2, максимальное значение в пределах допустимого диапазона выходного крутящего момента SR-электромотора 2 является значением T2, которое превышает запрашиваемый крутящий момент для трогания с места. Таким образом, SR-электромотор 2 может начинать движение транспортного средства 1 посредством вывода крутящего момента, который выше крутящего момента сопротивления движению, к примеру, градиента. Когда транспортное средство 1 трогается с места и начинает движение, значение фрикционного сопротивления в каждом узле приводной системы транспортного средства 1 изменяется со значения сопротивления посредством статического трения до начала движения на значение сопротивления посредством динамического трения. Другими словами, абсолютная величина значения фрикционного сопротивления после начала движения (значения динамического фрикционного сопротивления) меньше абсолютной величины значения фрикционного сопротивления во время остановки (значения статического фрикционного сопротивления). Соответственно, имеется высокая вероятность того, что абсолютная величина нормального максимального крутящего момента Tmax0 SR-электромотора 2 в каждой позиции вращения становится больше крутящего момента сопротивления движению после начала движения, и за счет этого транспортное средство 1 может непрерывно двигаться передним ходом посредством SR-электромотора 2.
Далее описывается второе управление по току со ссылкой на фиг. 6. Второе управление по току представляет собой управление для инструктирования SR-электромотору 2 временно выводить крутящий момент, который выше допустимого диапазона. Другими словами, второе управление по току представляет собой управление для формирования крутящего момента в направлении вращения, чтобы начинать движение транспортного средства 1, посредством временной подачи значения тока, которое превышает нормальное максимальное значение Imax0 тока, в SR-электромотор 2. Фиг. 6 показывает второй максимальный крутящий момент Tmax2 в дополнение к нормальному максимальному крутящему моменту Tmax0. В случае, если транспортное средство 1 не может начинать движение, даже когда SR-электромотор 2 выводит нормальный максимальный крутящий момент Tmax0, ЭМУ 4 временно изменяет максимальное значение тока на значение, которое превышает нормальное максимальное значение Imax0 тока. В нижеприведенном описании, максимальное значение тока, которому разрешается протекать через SR-электромотор 2 при втором управлении по току, называется просто вторым максимальным значением Imax2 тока. Второй максимальный крутящий момент Tmax2 указывает максимальный крутящий момент, который может выводиться посредством SR-электромотора 2, когда подается второе максимальное значение Imax2 тока.
Второе максимальное значение Imax2 тока вычисляется, например, на основе состояния аккумулятора 20, такого как температура или напряжение аккумулятора 20, и состояния SR-электромотора 2, такого как температура катушки 25. Второе максимальное значение Imax2 тока предпочтительно задано в таком диапазоне, что второе максимальное значение Imax2 тока не оказывает влияние на износостойкость SR-электромотора 2 даже при временной подаче в SR-электромотор 2. На фиг. 6, абсолютная величина T3 второго максимального крутящего момента Tmax2, которая соответствует позиции ω1 остановки, превышает запрашиваемый крутящий момент для трогания с места. Другими словами, ток с большим значением тока, чем нормально допустимое значение, подается в SR-электромотор 2. Соответственно, крутящий момент электромотора увеличивается, и транспортное средство 1 в силу этого может начинать движение.
Ниже описывается управление посредством устройства 100 управления транспортным средством по этому варианту осуществления со ссылкой на фиг. 7. Последовательность операций управления, показанная на фиг. 7, выполняется в случае, если ЭМУ 4 активируется, например, в случае, если диапазон движения инструктирован водителем. Эта последовательность операций управления многократно выполняется, например, с указанными интервалами.
На этапе S10 ЭМУ 4 определяет то, остановлено или нет транспортное средство 1, на основе результата определения датчика 9 скорости транспортного средства и т.п. Если выполнено положительное определение в отношении того, что транспортное средство 1 остановлено, в результате определения на этапе S10 (этап S10: "Да"), процесс переходит к этапу S20. Если выполнено отрицательное определение (этап S10: "Нет"), процесс переходит к этапу S40.
На этапе S20, ЭМУ 4 извлекает запрашиваемый крутящий момент для трогания с места. Запрашиваемый крутящий момент для трогания с места по этому варианту осуществления является выходным крутящим моментом (требуемым крутящим моментом) SR-электромотора 2, который позволяет начинать движение транспортного средства 1. Транспортное средство 1 по этому варианту осуществления движется с использованием SR-электромотора 2 в качестве одного источника приведения в движение. Соответственно, запрашиваемый крутящий момент для трогания с места является крутящим моментом электромотора, который требуется для того, чтобы начинать движение транспортного средства 1 в направлении движения против сопротивления движению, к примеру, сопротивления вследствие градиента. ЭМУ 4 вычисляет запрашиваемый крутящий момент для трогания с места, например, на основе веса транспортного средства для транспортного средства 1, числа пассажиров транспортного средства 1 и определенной абсолютной величины градиента поверхности дороги. Следует отметить, что значение, которое предварительно определено на основе градиента поверхности дороги, может использоваться в качестве запрашиваемого крутящего момента для трогания с места. После того, как выполняется этап S20, процесс переходит к этапу S30.
На этапе S30, ЭМУ 4 определяет то, может или нет транспортное средство начинать движение посредством нормального управления. ЭМУ 4 выполняет отрицательное определение на этапе S30 в случае, если все следующие условия устанавливаются. (1) Направление движения транспортного средства 1 представляет собой направление подъема. (2) Запрашиваемый крутящий момент электромотора относительно SR-электромотора 2 является запрашиваемым крутящим моментом для трогания с места или выше. (3) Абсолютная величина нормального максимального крутящего момента Tmax0, которая соответствует определенной позиции вращения ротора 22, меньше абсолютной величины запрашиваемого крутящего момента для трогания с места.
Ниже описываются вышеуказанные условия. В случае, если условие (1) не устанавливается, предполагается, что транспортное средство 1 начинает движение на ровной дороге либо начинает движение в направлении спуска. Таким образом, транспортное средство 1 может начинать движение посредством нормального управления. В случае, если условие (2) не устанавливается, запрашиваемый крутящий момент электромотора, который соответствует операции ускорения водителя, ниже запрашиваемого крутящего момента для трогания с места. Другими словами, можно сказать, что абсолютная величина крутящего момента, требуемая для того, чтобы начинать движение транспортного средства 1, не запрашивается в SR-электромотор 2, и в силу этого начало движения в направлении движения не инструктировано. В случае, если условие (2) устанавливается, ЭМУ 4 начинает измерение времени остановки посредством таймера. Время остановки, которое должно измеряться, является истекшим временем, которое проходит в то время, когда ротор 22 SR-электромотора 2 остановлен, от момента времени, в который определяется запрос на трогание с места или запрос на ускорение водителем. Измеренное время остановки упоминается на этапе S80, который описывается ниже.
Относительно условия (3), абсолютная величина нормального максимального крутящего момента Tmax0, которая разрешается при нормальном управлении, вычисляется, например, посредством обращения к карте на фиг. 4. Посредством обращения к карте на фиг. 4, ЭМУ 4 оценивает абсолютную величину нормального максимального крутящего момента Tmax0 SR-электромотора 2 в текущей позиции вращения ротора 22, которая определяется посредством узла 3 определения позиции. В случае, если условие (3) не устанавливается, и абсолютная величина нормального максимального крутящего момента Tmax0 в текущей позиции вращения составляет абсолютную величину запрашиваемого крутящего момента для трогания с места или больше, транспортное средство 1 может начинать движение посредством нормального управления.
ЭМУ 4 выполняет положительное определение на этапе S30 в случае, если, по меньшей мере, любое из вышеуказанных условий (1)-(3) не устанавливается. Если выполнено положительное определение в результате определения на этапе S30 (этап S30: "Да"), процесс переходит к этапу S40. Если выполнено отрицательное определение (этап S30: "Нет"), процесс переходит к этапу S50.
На этапе S40, ЭМУ 4 выполняет нормальное управление. Когда операция ускорения водителем определяется, ЭМУ 4 инструктирует SR-электромотору 2 выводить запрашиваемый крутящий момент электромотора. Эта последовательность операций управления завершается, когда выполняется этап S40.
На этапе S50, ЭМУ 4 определяет то, может или нет выполняться второе управление по току. На основе состояния аккумулятора 20 и состояния SR-электромотора 2, ЭМУ 4 определяет то, может или нет абсолютная величина крутящего момента электромотора, которая превышает допустимый диапазон, выводиться из SR-электромотора 2. Если положительное определение выполнено на этапе S50 (этап S50: "Да"), процесс переходит к этапу S60. Если выполнено отрицательное определение (этап S50: "Нет"), процесс переходит к этапу S80.
На этапе S60, ЭМУ 4 определяет то, может или нет транспортное средство начинать движение посредством второго управления по току. На основе текущего состояния SR-электромотора 2 и текущего состояния аккумулятора 20, ЭМУ 4 определяет максимальное значение тока (второе максимальное значение Imax2 тока), которое подается в SR-электромотор 2 при втором управлении по току. ЭМУ 4 оценивает второй максимальный крутящий момент Tmax2, который выводится посредством SR-электромотора 2 в текущей позиции остановки ротора 22 в случае, если второе максимальное значение Imax2 тока подается. Если абсолютная величина второго максимального крутящего момента Tmax2 составляет абсолютную величину запрашиваемого крутящего момента для трогания с места или больше, выполняется положительное определение (этап S60: "Да"), и процесс переходит к этапу S70. Если выполнено отрицательное определение (этап S60: "Нет"), процесс переходит к этапу S80.
На этапе S70, ЭМУ 4 выполняет второе управление по току. ЭМУ 4 определяет запрашиваемый крутящий момент относительно SR-электромотора 2 как находящийся в пределах диапазона, который является вторым максимальным крутящим моментом Tmax2 или ниже. Абсолютная величина запрашиваемого крутящего момента относительно SR-электромотора 2 предпочтительно задается в диапазоне от запрашиваемого крутящего момента для трогания с места до запрашиваемого крутящего момента электромотора. Тем не менее, до тех пор, пока ротор 22 не начнет вращение в направлении положительного вращения, абсолютная величина запрашиваемого крутящего момента относительно SR-электромотора 2 может увеличиваться, так что она превышает абсолютную величину запрашиваемого крутящего момента электромотора. Эта последовательность операций управления завершается, когда выполняется этап S70. Следует отметить, что в случае, если запрашиваемый крутящий момент электромотора соответствует значению нормального максимального крутящего момента Tmax0 или ниже после того, как выполняется этап S70, и транспортное средство 1 в силу этого начинает движение, ЭМУ 4 завершает второе управление по току и начинает нормальное управление.
На этапе S80, ЭМУ 4 определяет то, остановлен или нет ротор 22 в течение порогового времени или больше. Если время остановки (длительное время остановки) ротора 22 от момента времени, в который определяется запрос на трогание с места водителем, составляет предварительно определенное пороговое значение или больше, ЭМУ 4 выполняет положительное определение на этапе S80 (этап S80: "Да"), и процесс переходит к этапу S130. Если отрицательное определение выполнено на этапе S80 (этап S80: "Нет"), процесс переходит к этапу S90.
На этапе S90, ЭМУ 4 выполняет управление без подачи питания первого управления по току. ЭМУ 4 запрещает подачу тока в катушку 25 SR-электромотора 2 и переключает на состояние, в котором возбуждение SR-электромотора 2 прекращено. SR-электромотор 2, возбуждение которого прекращается, не формирует крутящий момент ни в одном направлении вращения и в силу этого переключается в свободное состояние. В случае, если транспортное средство 1 находится на дороге с уклоном, сила в направлении спуска посредством силы тяжести действует на транспортное средство 1. Эта сила в направлении спуска передается от поверхности дороги в SR-электромотор 2 через колеса 5 транспортного средства. Направление крутящего момента, который вводится в ротор 22 SR-электромотора 2, является обратным направлением относительно направления вращения, в котором транспортное средство 1 начинает движение, другими словами, обратным направлением (направлением обратного вращения) относительно направления крутящего момента, запрашиваемого водителем. Ротор 22 вращается в направлении обратного вращения посредством крутящего момента в направлении обратного вращения, которое передается от поверхности дороги. Таким образом, позиция вращения ротора 22 изменяется, и абсолютная величина нормального максимального крутящего момента Tmax0, которая может выводиться посредством SR-электромотора 2, изменяется в соответствии с изменением позиции вращения. После того, как выполняется этап S90, процесс переходит к этапу S100.
На этапе S100, ЭМУ 4 определяет то, остановлен или нет ротор 22, на основе результата определения узла 3 определения позиции. ЭМУ 4 получает позицию вращения ротора 22, например, из узла 3 определения позиции каждый раз, когда выполняется этап S100. ЭМУ 4 выполняет положительное определение на этапе S100, если абсолютная величина разности между позицией вращения ротора 22, которая получена в прошлый раз, и позицией вращения ротора 22, которая получается в этот раз, составляет указанное значение или меньше. Если на этапе S100 определено то, что ротор 22 остановлен (этап S100: "Да"), процесс переходит к этапу S110. Если выполнено отрицательное определение (этап S100: "Нет"), процесс переходит к этапу S120.
На этапе S110, ЭМУ 4 продолжает подсчет времени остановки посредством таймера. После того, как выполняется этап S110, процесс переходит к этапу S20.
На этапе S120, ЭМУ 4 сбрасывает время остановки ротора 22. Время остановки задается равным 0, поскольку ротор 22 начинает вращение. После того, как выполняется этап S120, процесс переходит к этапу S20.
На этапе S130, из первого управления по току, ЭМУ 4 выполняет вывод обратного крутящего момента. В случае, если ротор 22 остановлен в течение порогового времени или больше (этап S80: "Да") независимо от того факта, что выполняется управление без подачи питания (этап S90), это рассматривается как ситуация, когда которую ротор 22 не вращается в обратном направлении только посредством силы тяжести. В качестве такой ситуации, например, может возникать ситуация, когда транспортное средство 1 остановлено в состоянии, в котором колесо транспортного средства застряло в выбоине на поверхности дороги. На этапе S130, ЭМУ 4 инструктирует SR-электромотору 2 формировать крутящий момент в направлении обратного вращения и в силу этого инструктирует ротору 22 вращаться в направлении обратного вращения. Абсолютная величина обратного крутящего момента, которая формируется посредством SR-электромотора 2, предпочтительно является небольшой в такой степени, что водитель и т.п. транспортного средства 1 не испытывает некомфортное ощущение. Когда обратное вращение ротора 22 предпринимается на дороге, идущей в подъем, крутящий момент в направлении обратного вращения посредством силы тяжести уже действует на ротор 22. Соответственно, даже когда абсолютная величина обратного крутящего момента, которая формируется посредством SR-электромотора 2, является небольшой, имеется высокая вероятность того, что обратное вращение ротора 22 может начинаться. Абсолютная величина обратного крутящего момента, которая формируется посредством SR-электромотора 2, например, предпочтительно меньше абсолютной величины обратного крутящего момента, которая действует на ротор 22 в ответ на силу тяжести. Помимо этого, абсолютная величина обратного крутящего момента, которая формируется посредством SR-электромотора 2, может задаваться равной абсолютной величине указанного отношения относительно абсолютной величины обратного крутящего момента посредством силы тяжести. В качестве одного примера, указанное отношение может составлять несколько [%]. После того, как выполняется этап S130, процесс переходит к этапу S20.
В случае, если этап S30 выполняется после того, как первое управление по току (этапы S90, S130) начинается, позиция вращения ротора 22 получается снова из узла 3 определения позиции на этапе S30. ЭМУ 4 вычисляет абсолютную величину нормального максимального крутящего момента Tmax0, которая соответствует новой полученной позиции вращения. ЭМУ 4 определяет то, устанавливаются или нет вышеуказанные условия (1) и (2), и на основе последней абсолютной величины нормального максимального крутящего момента Tmax0 определяет то, устанавливается или нет вышеуказанное условие (3). Если последняя абсолютная величина нормального максимального крутящего момента Tmax0 составляет абсолютную величину запрашиваемого крутящего момента для трогания с места или больше, условие (3) не устанавливается, и в силу этого положительное определение выполнено на этапе S30. Как результат, в случае, если первое управление по току выполнено к настоящему моменту, первое управление по току завершается на этапе S40, и возобновляется нормальное управление. Другими словами, ЭМУ 4 завершает управление по току (первое управление по току) для инструктирования обратного вращения ротора 22, начинает нормальное управление по току относительно SR-электромотора 2 и за счет этого начинает движение транспортного средства 1 посредством крутящего момента электромотора.
Как описано выше, в случае, если начало движения транспортного средства 1 предпринимается, но транспортное средство 1 не начинает движение (этап S30: "Нет"), даже когда SR-электромотор 2 выводит нормальный максимальный крутящий момент Tmax0 (максимальный крутящий момент, который может выводиться посредством нормального управления по току), ЭМУ 4 (узел управления) устройства 100 управления транспортным средством по этому варианту осуществления выполняет первое управление по току для инструктирования ротору 22 вращаться в обратном направлении относительно направления вращения, в котором транспортное средство 1 начинает движение (этапы S90, S130).
Если определено то, что транспортное средство может начинать движение посредством нормального управления во время выполнения первого управления по току (этап S30: "Да"), ЭМУ 4 завершает первое управление по току на этапе S40 и начинает нормальное управление. Другими словами, ЭМУ 4 завершает управление по току (первое управление по току) для инструктирования обратного вращения ротора 22 и управляет SR-электромотором 2 таким образом, что транспортное средство 1 формирует мощность приведения в движение в направлении начала движения, которое запрашивается водителем. Другими словами, после того, как ротор 22 вращается в обратном направлении посредством первого управления по току в позицию вращения, в которой может выводиться крутящий момент для обеспечения начала движения транспортного средства 1, ЭМУ 4 выполняет управление по току (нормальное управление) для инструктирования ротору 22 вращаться в направлении вращения (направлении положительного вращения), чтобы начинать движение транспортного средства 1.
Как описано выше, устройство 100 управления транспортным средством по этому варианту осуществления может улучшать рабочие характеристики трогания с места транспортного средства 1 посредством инструктирования обратного вращения ротора 22 посредством первого управления по току в позицию вращения, в которой может выводиться запрашиваемый крутящий момент для трогания с места.
Здесь, "позиция вращения, в которой может выводиться крутящий момент для обеспечения начала движения транспортного средства 1", предпочтительно представляет собой позицию вращения, в которой нормальный максимальный крутящий момент Tmax0 становится запрашиваемым крутящим моментом для трогания с места или выше. Тем не менее, вместо этого может приспосабливаться позиция вращения, в которой второй максимальный крутящий момент Tmax2 становится запрашиваемым крутящим моментом для трогания с места или выше. Другими словами, первое управление по току может представлять собой управление для инструктирования обратного вращения ротора 22 посредством второго управления по току в позицию вращения, в которой транспортное средство 1 может начинать движение.
ЭМУ 4 предпочтительно определяет позицию целевого вращения ротора 22 таким образом, что величина изменения позиции вращения ротора 22 посредством первого управления по току является наименьшей. Например, в случае, если транспортное средство становится способным начинать движение либо посредством нормального управления, либо посредством второго управления по току, в то время как ротор 22 вращается в обратном направлении посредством первого управления по току, предпочтительно, чтобы первое управление по току завершалось в этот момент времени, и транспортное средство 1 начинало движение. ЭМУ 4 может определять целевое значение величины обратного вращения ротора 22 заранее. Например, предполагается, что величина обратного вращения ротора 22, которая требуется для того, чтобы обеспечивать начало движения посредством второго управления по току, предположительно меньше величины обратного вращения ротора 22, которая требуется для того, чтобы обеспечивать начало движения посредством нормального управления. В этом случае, первое управление по току предпочтительно выполняется с наименьшей величиной обратного вращения, которая обеспечивает начало второго управления по току, в качестве целевого значения величины обратного вращения ротора 22.
ЭМУ 4 по этому варианту осуществления может выполнять второе управление по току для инструктирования SR-электромотору 2 временно выводить крутящий момент, который соответствует направлению вращения, чтобы начинать движение транспортного средства 1 (направлении положительного вращения), и который выше максимального крутящего момента, который может выводиться посредством нормального управления по току. В случае, если транспортное средство 1 не начинает движение посредством нормального максимального крутящего момента Tmax0 SR-электромотора 2 (максимального крутящего момента, который может выводиться посредством нормального управления по току) (этап S30: "Нет"), ЭМУ 4 приоритезирует выполнение второго управления по току относительно выполнения первого управления по току. В этом варианте осуществления, сконфигурирована такая последовательность операций управления, в которой второе управление по току выполняется сначала в случае, если второе управление по току может выполняться (этап S50: "Да"), и транспортное средство может начинать движение посредством второго управления по току (этап S60: "Да"). В случае, если второе управление по току не может выполняться, либо в случае, если транспортное средство 1 не может начинать движение посредством второго управления по току, выполняется первое управление по току. Посредством приоритезации выполнения второго управления по току относительно выполнения первого управления по току, ЭМУ 4 повышает скорость отклика при трогании с места и за счет этого улучшает рабочие характеристики трогания с места транспортного средства 1.
Посредством прекращения возбуждения SR-электромотора 2 при первом управлении по току (этап S90), ЭМУ 4 по этому варианту осуществления инструктирует ротору 22 вращаться в направлении обратного вращения посредством силы тяжести, которая действует на транспортное средство 1. В ситуации, в которой транспортное средство 1 не может начинать движение посредством крутящего момента электромотора, к примеру, во время движения на подъеме, крутящий момент в направлении обратного вращения, вызываемом посредством силы тяжести, действует на ротор 22. В этом случае, ротор 22 может вращаться в обратном направлении посредством прекращения возбуждения SR-электромотора 2. Соответственно, ротор 22 может вращаться в обратном направлении в то время, когда потребление электроэнергии посредством SR-электромотора 2 подавляется. Следовательно, может достигаться как улучшение рабочих характеристик трогания с места транспортного средства 1, так и уменьшение расхода топлива.
В случае, если ротор 22 не вращается в направлении обратного вращения (этап S80: "Да") даже после того, как возбуждение SR-электромотора 2 прекращено в течение заданного периода при первом управлении по току, ЭМУ 4 по этому варианту осуществления инструктирует SR-электромотору 2 выводить крутящий момент в направлении обратного вращения (этап S130) и инструктирует ротору 22 вращаться в направлении обратного вращения. Поскольку обратное вращение ротора 22 стимулируется посредством крутящего момента электромотора, ЭМУ 4 регулирует позицию вращения ротора 22 посредством крутящего момента электромотора и за счет этого улучшает рабочие характеристики трогания с места транспортного средства 1.
В случае, если транспортное средство 1 не начинает движение (этап S30: "Нет") посредством нормального максимального крутящего момента Tmax0 SR-электромотора 2 (максимального крутящего момента, который может выводиться посредством нормального управления по току), и направление начала движения транспортного средства 1 представляет собой направление подъема, ЭМУ 4 по этому варианту осуществления может инструктировать SR-электромотору 2 выводить крутящий момент в направлении обратного вращения и в силу этого инструктировать ротору 22 вращаться в направлении обратного вращения при первом управлении по току. В случае, если отрицательное определение выполнено на этапе S50 или на этапе S60, и в силу этого выполняется первое управление по току, ЭМУ 4 может выполнять управление выводом обратного крутящего момента (этап S130) без выполнения управления понижением крутящего момента (этап S90). Когда транспортное средство начинает движение в направлении подъема, сила в направлении спуска посредством силы тяжести действует на транспортное средство 1. Соответственно, считается, что водитель с меньшей вероятностью должен испытывать некомфортное ощущение, даже когда SR-электромотор 2 выводит обратный крутящий момент. ЭМУ 4 повышает скорость отклика при трогании с места посредством инструктирования обратного вращения ротора 22 посредством управления выводом обратного крутящего момента.
Устройство 100 управления транспортным средством согласно этому варианту осуществления может увеличивать максимальное значение градиента, относительно которого транспортное средство может начинать движение, и за счет этого может улучшать рабочие характеристики трогания с места транспортного средства 1. Помимо этого, посредством определения заранее того, может или нет транспортное средство начинать движение посредством нормального управления, и в силу этого выполнения первого управления по току или второго управления по току, устройство 100 управления транспортным средством согласно этому варианту осуществления может подавлять лишнее возбуждение, которое инструктирует SR-электромотору 2 непрерывно выводить мощность в состоянии, в котором крутящий момент электромотора является небольшим относительно запрашиваемого крутящего момента для трогания с места. Таким образом, становятся возможными повышение скорости отклика при трогании с места, снижение расхода топлива, защита от возрастания температуры SR-электромотора 2 и т.п.
Ниже описывается второй вариант осуществления со ссылкой на фиг. 8. Относительно второго варианта осуществления компоненты, которые имеют функции, аналогичные функциям, описанным в вышеуказанном первом варианте осуществления, обозначаются посредством идентичных ссылочных позиций, и перекрывающееся описание не приводится. Фиг. 8 является блок-схемой последовательности операций способа согласно второму варианту осуществления. Аспект во втором варианте осуществления, который отличается от вышеуказанного первого варианта осуществления, представляет собой такой аспект, что выбирается не только управление для прогнозирования того, может или нет транспортное средство 1 начинать движение, и выполнения начала движения (нормальное управление, первое управление по току, второе управление по току), но также и снова выбирается управление для определения того, вращается или нет ротор 22 фактически в результате выполнения каждого управления и выполнения начала движения.
Например, когда транспортное средство едет в подъем во время начала движения, более высокий крутящий момент, чем запрашиваемый крутящий момент для трогания с места, который соответствует градиенту поверхности дороги, возможно, требуется для того, чтобы начинать движение транспортного средства 1. В таком случае, даже когда определяется то, что транспортное средство может начинать движение посредством нормального управления на основе градиента поверхности дороги, и нормальное управление начинается, предусмотрен случай, в котором сопротивление движению фактически является слишком высоким для того, чтобы начинать вращение SR-электромотора 2. В этом варианте осуществления, в результате выполнения нормального управления и второго управления по току определяется то, вращается или нет ротор 22 фактически. В случае, если ротор 22 не вращается посредством нормального управления, крутящий момент увеличивается посредством второго управления по току, либо выполняется обратное вращение ротора 22 посредством первого управления по току. Помимо этого, в случае, если ротор 22 не вращается посредством второго управления по току, выполняется обратное вращение ротора 22 посредством первого управления по току. Таким образом, согласно управлению началом движения по этому варианту осуществления, в ситуации, в которой сопротивление движению является высоким, к примеру, в случае, в котором транспортное средство едет в подъем во время начала движения, надлежащее управление может выбираться, и за счет этого могут улучшаться рабочие характеристики трогания с места транспортного средства 1.
Ниже описывается управление по второму варианту осуществления со ссылкой на фиг. 8. Аспект в последовательности операций управления, показанной на фиг. 8, который отличается от управления первым вариантом осуществления (фиг. 7), представляет собой такой аспект, что добавляются этап S45, этап S75 и этапы S150-S230.
На блок-схеме последовательности операций способа на фиг. 8, этапы S10-S40 являются идентичными этапам S10-S40 вышеуказанного первого варианта осуществления. Если отрицательное определение выполнено на этапе S30, выполняется процесс, идентичный процессу от этапа S50 до этапа S130 на блок-схеме последовательности операций способа вышеуказанного первого варианта осуществления, показанной на фиг. 7. Во втором варианте осуществления, после того, как выполняется этап S40, процесс переходит к этапу S45. На этапе S45, ЭМУ 4 определяет то, вращается или нет ротор 22, на основе результата определения узла 3 определения позиции. Если положительное определение выполнено на этапе S45 (этап S45: "Да"), процесс завершается. Если выполнено отрицательное определение (этап S45: "Нет"), процесс переходит к этапу S150.
Этап S150 на фиг. 8 является идентичным этапу S50 в вышеуказанном первом варианте осуществления. На этапе S160, ЭМУ 4 определяет то, может или нет транспортное средство начинать движение посредством второго управления по току. На этапе S160, ЭМУ 4 определяет то, может или нет текущий запрашиваемый крутящий момент электромотора выводиться посредством второго управления по току. В случае, если абсолютная величина запрашиваемого крутящего момента электромотора, которая соответствует рабочей величине нажатия педали акселератора, превышает абсолютную величину второго максимального крутящего момента Tmax2, считается, что транспортное средство 1 не может начинать движение посредством второго управления по току. В случае, если абсолютная величина запрашиваемого крутящего момента электромотора составляет абсолютную величину второго максимального крутящего момента Tmax2 или меньше, ЭМУ 4 выполняет положительное определение на этапе S160 (этап S160: "Да"), и процесс переходит к этапу S170. В случае, если абсолютная величина запрашиваемого крутящего момента электромотора превышает абсолютную величину второго максимального крутящего момента Tmax2, отрицательное определение выполнено на этапе S160 (этап S160: "Нет"), и процесс переходит к этапу S180.
На этапе S170 на фиг. 8, ЭМУ 4 выполняет второе управление по току. Абсолютная величина запрашиваемого крутящего момента относительно SR-электромотора 2 при втором управлении по току на этапе S170 предпочтительно является идентичной абсолютной величине запрашиваемого крутящего момента электромотора, которая соответствует операции ускорения водителем. Во втором варианте осуществления, после того, как выполняется этап S170, процесс переходит к этапу S175. На этапе S175, ЭМУ 4 определяет то, вращается или нет ротор 22, на основе результата определения узла 3 определения позиции. Если положительное определение выполнено на этапе S175 (этап S175: "Да"), эта последовательность операций управления завершается. Если выполнено отрицательное определение (этап S175: "Нет"), процесс переходит к этапу S180. На фиг. 8, этапы S180-S230 являются идентичными этапам S80-S130 вышеуказанного первого варианта осуществления. Другими словами, если выполнено положительное определение в отношении того, что ротор 22 остановлен в течение порогового времени или больше (этап S180: "Да"), выполняется управление выводом обратного крутящего момента (этап S230). Если отрицательное определение выполнено на этапе S180 (этап S180: "Нет"), управление без подачи питания выполняется на этапе S190. Если выполнено положительное определение в отношении того, что ротор 22 остановлен (этап S200: "Да"), процесс переходит к этапу S210, и подсчет времени остановки продолжается. Если отрицательное определение выполнено на этапе S200 (этап S200: "Нет"), процесс переходит к этапу S220, и время остановки сбрасывается.
Ниже описывается третий вариант осуществления со ссылкой на фиг. 9. Относительно третьего варианта осуществления компоненты, которые имеют функции, аналогичные функциям, описанным в вышеуказанном первом варианте осуществления и втором варианте осуществления, обозначаются посредством идентичных ссылочных позиций, и перекрывающееся описание не приводится. Фиг. 9 является блок-схемой последовательности операций способа согласно третьему варианту осуществления. Если определено то, что транспортное средство не может начинать движение посредством нормального управления (этап S30: "Нет"), ЭМУ 4 по третьему варианту осуществления выполняет первое управление по току без выполнения второго управления по току. Кроме того, в случае, если транспортное средство 1 начинает движение в направлении подъема, ЭМУ 4 выполняет управление выводом обратного крутящего момента на этапе S130 без выполнения управления понижением крутящего момента этапа S80 на блок-схеме последовательности операций способа первого варианта осуществления, показанной на фиг. 7.
Как показано на фиг. 9, на блок-схеме последовательности операций способа этого варианта осуществления, этапы согласно второму управлению по току (например, этапы S50-S70 на фиг. 7) не предоставляются. На блок-схеме последовательности операций способа на фиг. 9, этапы S10-S40 являются идентичными этапам S10-S40 вышеуказанного первого варианта осуществления. Если отрицательное определение выполнено на этапе S30, процесс переходит к этапу S55, и определяется то, начинает или нет транспортное средство движение в направлении подъема, посредством ЭМУ 4. Если ЭМУ 4 выполняет положительное определение в отношении того, что транспортное средство 1 начинает движение в направлении подъема, на основе результата определения датчика 10 градиента (этап S55: "Да"), процесс переходит к этапу S130. Если выполнено отрицательное определение (этап S55: "Нет"), процесс переходит к этапу S80. Следует отметить, что в случае, если начало движения транспортного средства 1 в направлении подъема предпринимается, и абсолютная величина градиента поверхности дороги составляет указанное значение или больше, ЭМУ 4 может выполнять положительное определение на этапе S55. На блок-схеме последовательности операций способа на фиг. 9, этапы S80-S130 являются идентичными этапам S80-S130 вышеуказанного первого варианта осуществления.
Как описано выше, в случае, если транспортное средство 1 не начинает движение посредством нормального максимального крутящего момента Tmax0 (максимального крутящего момента, который может выводиться посредством нормального управления по току), и направление начала движения транспортного средства 1 представляет собой направление подъема (этап S55: "Да"), ЭМУ 4 по этому варианту осуществления инструктирует SR-электромотору 2 выводить крутящий момент в направлении обратного вращения и инструктирует ротору 22 вращаться в направлении обратного вращения при первом управлении по току (этап S130). Соответственно, может повышаться скорость отклика от момента времени, в который выполняется запрос на трогание с места водителем, до момента времени, в который транспортное средство 1 фактически начинает движение.
Ниже описывается первый модифицированный пример вышеописанных вариантов осуществления. В вышеприведенных первом-третьем вариантах осуществления, порядки по приоритету двух типов управления первым управлением по току и вторым управлением по току не ограничены проиллюстрированными порядками. Например, выполнение первого управления по току может быть приоритезировано выше относительно выполнения второго управления по току, или выполнение управления выводом обратного крутящего момента может быть приоритезировано выше относительно выполнения управления понижением крутящего момента при первом управлении по току.
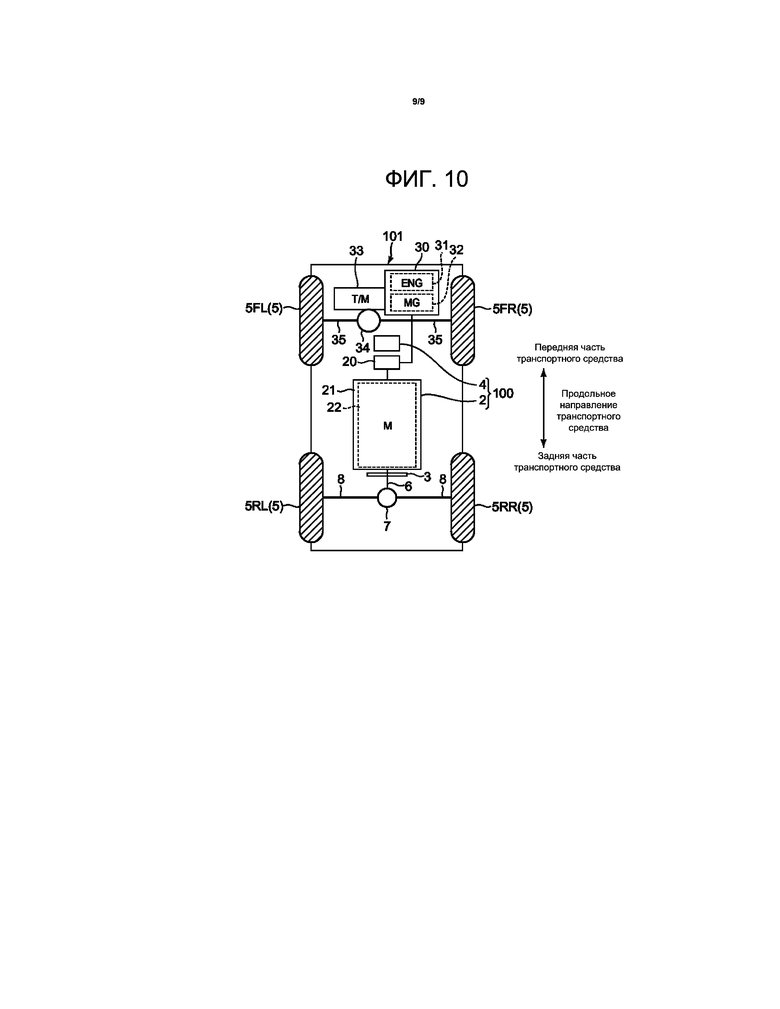
Далее описывается второй модифицированный пример вышеописанных вариантов осуществления. В вышеприведенных первом-третьем вариантах осуществления, транспортное средство в качестве цели применения не ограничено проиллюстрированным транспортным средством. Фиг. 10 является схематичным конфигурационным видом транспортного средства согласно второму модифицированному примеру каждого варианта осуществления. Аспект в транспортном средстве 101 согласно второму модифицированному примеру, который отличается от транспортного средства 1 в каждом из вышеописанных вариантов осуществления, представляет собой такой аспект, что предоставляется источник 30 приведения в движение за счет передних колес. Источник 30 приведения в движение за счет передних колес имеет двигатель 31 и электромотор-генератор 32. Например, двигатель 31 и электромотор-генератор 32 могут соединяться последовательно или могут соединяться таким образом, что мощность может разделяться через дифференциальный механизм, к примеру, планетарный редуктор. Выходной вал источника 30 приведения в движение за счет передних колес соединяется с дифференциальной коробкой 34 передач через трансмиссию 33. Дифференциальная коробка 34 передач соединяется с передними колесами 5FL, 5FR через левый и правый ведущие валы 35, соответственно. Трансмиссия 33 управляет передаточным числом из источника 30 приведения в движение за счет передних колес на передние колеса 5FL, 5FR. Двигатель 31 (ENG), электромотор-генератор 32 (MG) и трансмиссия 33 (T/M) управляются посредством ЭМУ 4.
ЭМУ 4 определяет выходной крутящий момент источника 30 приведения в движение за счет передних колес и выходной крутящий момент SR-электромотора 2 на основе запрашиваемой мощности приведения в движение, которая вычисляется из рабочей величины нажатия педали акселератора и т.п. Соответственно, в этом модифицированном примере, из крутящего момента для формирования запрашиваемой мощности приведения в движение, крутящий момент, сформированный посредством SR-электромотора 2, становится запрашиваемым крутящим моментом электромотора.
В транспортном средстве 101 этого модифицированного примера, например, ЭМУ 4 определяет то, может или нет транспортное средство начинать движение посредством нормального управления, как описано ниже. Ниже приводится описание с вышеуказанным первым вариантом осуществления (см. фиг. 7), в качестве примера. На этапе S30, аналогично вышеуказанному первому варианту осуществления, ЭМУ 4 вычисляет запрашиваемый крутящий момент для трогания с места. ЭМУ 4 вычисляет нормальный максимальный крутящий момент Tmax0 SR-электромотора 2, который соответствует максимальному крутящему моменту Tmax30 источника 30 приведения в движение за счет передних колес в пределах допустимого диапазона и определенной позиции вращения ротора 22. Здесь, максимальный крутящий момент Tmax30 соответствует значению, которое преобразуется в крутящий момент на ведущем валу 35. На этапе S30 вышеуказанного первого варианта осуществления, ЭМУ 4 использует следующее условие (4) вместо условия (3). (4) Абсолютная величина полного крутящего момента колеса транспортного средства в случае, если источник 30 приведения в движение за счет передних колес выводит максимальный крутящий момент Tmax30, и SR-электромотор 2 выводит нормальный максимальный крутящий момент Tmax0, меньше абсолютной величины запрашиваемого крутящего момента для трогания с места. ЭМУ 4 выполняет отрицательное определение на этапе S30 в случае, если все условия (1), (2) и (4) устанавливаются.
На этапе S60, в случае, если SR-электромотор 2 выводит второй максимальный крутящий момент Tmax2, и в силу этого полный крутящий момент колеса транспортного средства становится запрашиваемым крутящим моментом для трогания с места или выше, ЭМУ 4 может определять то, что транспортное средство может начинать движение посредством второго управления по току (этап S60: "Да").
Как описано выше, в транспортном средстве 101, в котором источник приведения в движение монтируется в дополнение к SR-электромотору 2, в случае, если транспортное средство 1 не может начинать движение, даже когда каждый источник приведения в движение выводит максимальный крутящий момент в пределах допустимого диапазона, выполняются первое управление по току и второе управление по току.
Раскрытые аспекты в каждом из вышеописанных вариантов осуществления и в каждом из вышеуказанных модифицированных примеров могут надлежащим образом комбинироваться и реализовываться.
Изобретение относится к устройству управления транспортным средством. Технический результат – улучшение пусковых свойств. Предусмотрено устройство управления транспортным средством, которое включает в себя коммутируемый реактивный электромотор и электронный модуль управления, выполняющий управление по току коммутируемого реактивного электромотора. При этом выполняется первое управление по току для вращения ротора в обратном направлении относительно направления, в котором транспортное средство начинает движение, если транспортное средство не начинает движение даже тогда, когда коммутируемый реактивный электромотор выводит максимальный крутящий момент в пределах допустимого диапазона. Выполняется управление для вращения ротора в направлении движения транспортного средства, когда оно начинает движение после того, как задействовано первое управление по току. 3 з.п. ф-лы, 10 ил.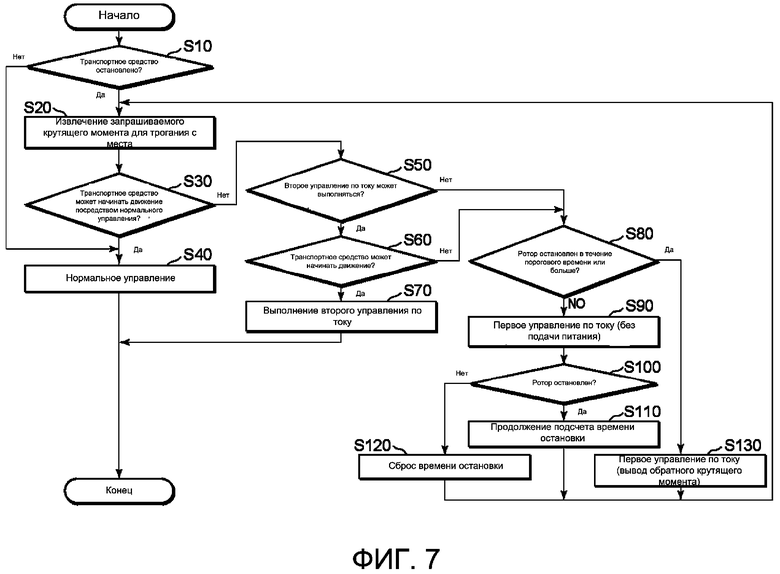
1. Устройство управления транспортным средством, содержащее:
коммутируемый реактивный электромотор, имеющий ротор и статор и установленный на транспортном средстве в качестве источника приведения в движение для обеспечения движения;
электронный модуль управления, выполненный с возможностью осуществления управления по току упомянутого коммутируемого реактивного электромотора, причем электронный модуль управления выполнен с возможностью:
(i) выполнения первого управления по току, при этом согласно первому управлению по току обеспечивается вращение ротора в обратном направлении вращения относительно направления вращения, в котором транспортное средство должно начать движение, в случае, если транспортное средство не начинает движение даже тогда, когда с коммутируемого реактивного электромотора выводится максимальный крутящий момент, который может выводиться посредством нормального управления по току; и
(ii) выполнения управления для обеспечения вращения ротора в направлении вращения, в котором транспортное средство должно начать движение после того, как ротор вращается в обратном направлении вращения, посредством первого управления по току в позицию вращения, в которой может выводиться крутящий момент для обеспечения начала движения транспортного средства;
iii) предпочтительного выполнения второго управления по току относительно выполнения первого управления по току в случае, если транспортное средство не начинает движение даже тогда, когда с коммутируемого реактивного электромотора выдается максимальный крутящий момент, который может выводиться посредством нормального управления по току, при этом согласно второму управлению по току обеспечивается временный вывод с коммутируемого реактивного электромотора крутящего момента, который создается в направлении вращения, в котором транспортное средство должно начать движение, и превышает максимальный крутящий момент, который может быть выведен посредством нормального управления по току.
2. Устройство по п. 1, в котором при первом управлении по току электронный модуль управления выполнен с возможностью:
(i) прекращения возбуждения коммутируемого реактивного электромотора, и
(ii) обеспечения вращения ротора в обратном направлении вращения посредством силы тяжести, которая действует на транспортное средство.
3. Устройство по п. 2, в котором при первом управлении по току электронный модуль управления выполнен с возможностью:
в случае если ротор не вращается в обратном направлении вращения даже после того, как возбуждение коммутируемого реактивного электромотора прекращено в течение заданного периода времени:
(i) обеспечения вывода с коммутируемого реактивного электромотора крутящего момента в обратном направлении вращения, и
(ii) обеспечения вращения ротора в обратном направлении вращения.
4. Устройство по п. 1, а котором при первом управлении по току электронный модуль управления выполнен с возможностью:
в случае если транспортное средство не начинает движение даже тогда, когда с коммутируемого реактивного электромотора выдается максимальный крутящий момент, который может выводиться посредством нормального управления по току, и направлением начала движения транспортного средства является направление подъема:
(i) обеспечения вывода с коммутируемого реактивного электромотора крутящего момента в обратном направлении вращения, и
(ii) обеспечения вращения ротора в обратном направлении вращения.
| US 2009025992 A1, 29.01.2009 | |||
| JPH 10337073 A, 18.12.1998 | |||
| US 2006028024 A1, 09.02.2006 | |||
| Пневматический тормозной привод автомобиля-тягача | 1986 |
|
SU1391980A1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402148C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2009 |
|
RU2408972C1 |

