Изобретение относится к области измерительной техники, а именно к устройствам измерения вязкости морской воды на различных глубинах, и может найти применение для обнаружения на больших глубинах подводных морских объектов, характеризующихся первичным или вторичным акустическим полем, с помощью мониторинга вязкости морской воды.
Распространение звука в воде - это волновой процесс, заключающийся в быстром сжатии и расширении среды. Быстрое изменение состояния среды приводит к нарушению термодинамического равновесия и необратимому преобразованию звуковой энергии в тепло, т.е. к поглощению звука.
Вязкость морской воды определяется ее химическим составом, а также зависит от температуры среды и статического давления (глубины погружения).
На глубинах свыше 200 м изменение вязкости становится существенным фактором, влияющим на дальность распространения звука в морской воде, поэтому мониторинг ее вязкости и устройство для измерения последней в условиях высокого давления являются необходимыми при обнаружении глубоководных морских объектов.
Известен прибор для измерения вязкости жидкости (а.с. СССР №67749, опубликовано 1946.12.31), созданный на принципе измерения отклонения изогнутой трубки от вертикали за счет реактивной силы истекающей жидкости. Недостатком такого прибора является невозможность его функционирования в автономных условиях.
Известен вискозиметр (RU2248551, опубл. 2005.03.20), работающий на принципе определения количества жидкости, вытесненной в измерительный сосуд под постоянным давлением. Недостатком известного устройства является сложность конструкции, малая точность измерения малой вязкости.
Известен вискозиметр Гепплера KF3.2, который выпускается в РФ по технической документации фирмы «Rheotest Messgerate Medingen GmbH», Германия (DIN53015-2001) и зарегистрирован в Госреестре средств измерений под номером 23961-02. Известное устройство представляет собой вискозиметр с падающим шариком, работающий на принципе измерения времени падения шарика в цилиндрической трубе, наполненной исследуемой жидкостью, наклоненной по отношению к вертикальной плоскости на 10°. Устройство не предназначено для работы с дистанционным управлением, при этом является конструктивно сложным, что отрицательно сказывается на его надежности.
За прототип взят вискозиметр с падающим шариком, предназначенный для измерения вязкости жидкости, движущейся со скоростью от 0,3 до 1,5 м/сек (а.с. СССР №151103, опубл. 1962, БИ №20), содержащий вертикальный цилиндрический сосуд с обводной трубой меньшего, чем сосуд диаметра, соединенный с ним через гидравлическое сопротивление.
Недостатками вискозиметра являются:
- низкая точность и большой разброс измерений, во-первых, из-за наличия восходящих потоков жидкости; во-вторых, из-за того, что на равномерность движения шарика в цилиндре влияет наличие неоднородностей (газовых пузырьков, возникающих в потоке восходящей жидкости) на стенках цилиндра; а также из-за влияния человеческого фактора при фиксации времени падения шарика, который, независимо от точности секундомера, в значительной степени определяет результат измерений;
- прибор не предназначен для измерений в условиях высокого статического давления
- и не обеспечивает возможность замеров в условиях дистанционного управления.
Задачей изобретения является создание дистанционно управляемого устройства, позволяющего производить измерения вязкости жидкости, в частности, морской воды, на различных глубинах.
Технический результат предлагаемого устройства заключается в расширении возможностей его использования за счет обеспечения измерений в условиях высокого статического давления и дистанционного управления процессом измерений при одновременном повышении их точности.
Указанный технический результат достигают устройством для измерения вязкости жидкости в условиях высокого давления с помощью падающего шарика, содержащего аналитический блок в виде вертикального цилиндра, снабженного обводной трубой с диаметром меньшим, чем диаметр цилиндра, соединенной с ним гидравлическим сопротивлением, и средствами фиксации времени прохождения падающим шариком заданного расстояния в вязкой жидкости, в котором, в отличие от известного, упомянутый цилиндр снабжен приемной воронкой, контейнером для шариков с двумя задвижками и помещен в корпус, выполненный с двумя входными отверстиями в нижней части, снабженными заслонкой, и выходным отверстием в верхней части, при этом устройство дополнительно содержит герметичную капсулу с размещенными в ней блоком управления и передачи информации, связанным с заслонками входных отверстий аналитического блока, а также блоком, управляющим сбрасыванием шариков, связанным с контейнером для их хранения, и регистрирующим блоком, при этом вышеупомянутая капсула вместе с аналитическим блоком входит в состав погружаемого модуля, связанного с подъемно-опускающим механизмом; причем устройство снабжено автономным пультом оператора, посредством беспроводного канала дистанционно связанным кодированной связью с блоком управления и передачи информации, блоком, управляющим сбрасыванием шариков, регистрирующим блоком и подъемно-опускающим механизмом.
В основу работы устройства, как и в прототипе, положен метод Стокса, при этом основным фактором, характеризующим вязкость жидкой среды, является скорость движения калиброванного шарика в этой среде.
Общая структура предлагаемого устройства схематично представлена на фиг. 1; на фиг. 2 проиллюстрирован принципиальная схема измерения вязкости жидкости с падающим шариком; на фиг. 3 приведена схема относительного перемещения соседних слоев жидкости, поясняющая процесс возникновения динамической вязкости морской воды; а на фиг. 4 показан процесс возникновения вихревых потоков морской воды при движении в ней калиброванного шарика.
Для обеспечения работоспособности предлагаемое устройство, схема которого дана на фиг. 1, снабжено подъемно-опускающим механизмом 1 с тросовой тягой 2. Непосредственно погружаемый модуль, являющийся частью предлагаемого устройства, содержит герметичную капсулу 3, в которой размещены блок 4 управления и передачи информации, связанный с автономным пультом 5 оператора посредством беспроводного канала 6 кодированной передачи информации, блок 7, управляющий сбрасыванием шариков, а также регистрирующий блок 8, связанный с блоком 4 управления и передачи информации. В погружаемом модуле находится также аналитический блок 9, выполненный с обводной трубой 10, который содержит контейнер 11 с верхней и нижней задвижками, снабженный сверху приемной воронкой, заполняемой калиброванными шариками (диаметр шарика строго калибруется под величину 0,7d, где d - диаметр обводной трубы), и связанный с управляющим блоком 7, по команде которого шарики падают в несмачиваемый измерительный цилиндр 12, снабженный двумя чувствительными элементами: входным 13 и выходным 14, фиксирующими прохождение калиброванного шарика 15 и связанными с регистрирующим блоком 8.
Несмачиваемое покрытие измерительного цилиндра 12 служит для минимизации влияния на поведение калиброванного шарика и на точность измерения времени его падения турбулентных течений, которые возникают в ходе проведения измерений при движении жидкости внутри аналитического блока 9, усиливаются за счет конструктивных неоднородностей в его стенках и особенно могут проявляться при работе в экспресс-режиме.
Корпус погружаемого модуля, в котором размещены капсула 3 и блок 9, преимущественно изготовлен из прочного композита, рассчитанного на эксплуатацию на больших глубинах. В нижней части модуля выполнены поочередно перекрываемые заслонкой 16 два входа в аналитический блок 9 для поступления жидкости, вязкость которой подлежит измерению: вход 1 -непосредственно во внутреннее пространство аналитического блока 9 и вход 2 - в обводную трубу 10, которая в середине своей горизонтальной части соединена с гидростатическим фильтром 17. Блок 9 в нижней части снабжен балластом 18, который в совокупности с тросовой тягой 2 обеспечивает его вертикальное положение в ходе измерения, предупреждая возможные искажения результатов.
Предлагаемое устройство работает следующим образом.
Оператор с автономного дистанционно расположенного пульта 5 имеет возможность формировать и отправлять в виде группы кодовых импульсов четыре следующих сигнала управления:
- первый сигнал представляет собой команду «открыть входную заслонку 16 и привести в действие подъемно-опускающее устройство 1»;
- второй сигнал - команда «подготовить шарики к сбросу для проведения измерения»;
- третий сигнал- команда «сбросить калиброванный шарик и провести измерение» в стационарном положении погружаемой части предлагаемого устройства, включающей блоки 3 и 9 (основной режим);
- четвертый сигнал - команда управления сбросом калиброванного шарика и процессом измерения при движении погружаемого модуля (капсула 3 и блок 9) (резервный режим).
В ходе подготовки предлагаемого устройства к измерениям первый сигнал управления с первого выхода автономного пульта 5 через беспроводной канал 6 обмена информацией подается на вход находящегося в герметичной капсуле 3 блока 4 (блока управления и передачи информации), с выхода упомянутого блока 4 поступает на входную заслонку 16, которая по этому сигналу открывает вход 2 и закрывает вход 1.
Далее по описанному выше первому сигналу управления, поступившему с расчетной задержкой, составляющей максимальное время, необходимое для проведения подготовительных манипуляций, со второго выхода автономного пульта 5 на вход подъемно-опускающего механизма 1, последний снимает со стопора тросовую тягу 2, в результате чего погружаемый модуль начинает двигаться вниз, достигая максимально допустимой скорости движения.
Через вход 2 аналитического блока 9 поток жидкости поступает в обводную трубу 10, унося с собой калиброванные шарики, находившиеся в объеме гидравлического сопротивления 17, которые под воздействием набегающего потока попадают в обводную трубу 10, поднимаются по ней вверх, попадают в приемную воронку контейнера 11. Замыкающий (последний) калиброванный шарик из находившихся в объеме гидравлического сопротивления 17, поднимаясь вверх, открывает доступ жидкости извне в аналитический блок 9 снизу, при этом эластичные жалюзи гидравлического сопротивления 17 смыкаются таким образом, что в блок 9 проходит только 10% всего объема поступающей с входа 2 жидкости. Незначительный напор жидкости не способен нарушить траекторию замыкающего шарика и не мешает ему занять свое место в приемной воронке контейнера 11. Через расчетное время, когда все шарики занимают исходное положение в приемной воронке контейнера 11, подъемно-опускающее устройство 1 стопорится.
Второй сигнал с первого выхода автономного пульта 5 оператора через беспроводной канал 6 передачи информации поступает в герметичную капсулу 3 на вход блока 4 управления и передачи информации. Далее с первого выхода этого блока 4 сигнал поступает на вход блока 7, управляющего сбрасыванием шариков из контейнера 11. По сигналу смещается верхняя задвижка и первый шарик под действием силы тяжести опускается на нижнюю задвижку. Верхняя задвижка сразу же возвращается в исходное положение, отделяя первый шарик от всех остальных.
По второму сигналу управления, поступающему с расчетной задержкой со второго выхода блока 4 на входную заслонку 16 погружаемого модуля, упомянутая заслонка перемещается таким образом, что закрывается вход 2 (в обходную трубу 10) и открывается вход 1 (непосредственно во внутреннее пространство блока 9). Через вход 1 жидкость поступает в аналитический блок 9, и набегающим потоком, возникающим в процессе быстрого погружения, замещает находящуюся там жидкость, которая уходит через выход в верхней части блока 9 вовнутрь корпуса погружаемого модуля и в окружающую среду до тех пор, пока все устройство находится в движении.
Этим заканчивается подготовка устройства к процессу измерения.
При работе в основном режиме измерения вязкости погружаемый модуль неподвижен и находится в стратифицированном слое жидкости.
Третий сигнал, посылаемый оператором с первого выхода автономного пульта 5, через беспроводной канал 6 поступает на вход блока 4 управления и передачи информации, находящегося в герметичной капсуле 3; далее с первого выхода упомянутого блока 4 - на вход блока 7, управляющего сбрасыванием шариков из контейнера 11. По этому сигналу нижняя задвижка контейнера 11 отодвигается и, как показано на чертеже 1, калиброванный шарик 15 падает в несмачиваемый измерительный цилиндр 12. Одновременно нижняя задвижка контейнера 11 закрывается, открывается его верхняя задвижка, пропускает внутрь второй шарик и закрывается, изолируя этот шарик. В это время первый шарик выпущенный из контейнера 11, двигаясь вниз в несмачиваемом измерительном цилиндре 12, попадает в зону срабатывания верхнего чувствительного элемента 13 и запускает блок регистрации 8, находящийся в герметичной капсуле 3. Продвигаясь еще ниже, он попадает в зону срабатывания нижнего
чувствительного элемента 14 и останавливает блок 8. Информация с выхода упомянутого блока 8 поступает на вход блока 4 управления и передачи информации, с третьего выхода которого она через беспроводной канал 6 попадает на первый вход автономного пульта 5, управляемого оператором.
Морская вода является вязкой жидкостью, подчиняющейся в своем движении закону вязкого трения Ньютона, в силу которого касательное напряжение внутреннего трения, или вязкость, (τ) и градиент скорости (∂u/∂z) являются линейно зависимыми. Коэффициент их зависимости (μ) представляет собой коэффициент внутреннего трения, или коэффициент вязкости (А.П. Сташкевич. Акустика моря. - Л.: Судостроение, 1966. - С. 10). Жидкости, для которых справедлива выведенная Ньютоном зависимость, называются ньютоновскими.
Скорость падения шарика в ньютоновской жидкости, в частности, в морской воде, и время его падения линейно зависят от вязкости этой жидкости, поэтому регистрирующий прибор для удобства пользования преимущественно градуируют в единицах вязкости (пуазах, м2/с).
На боковой поверхности цилиндра 12 нанесены метки, соответствующие местонахождению чувствительных элементов 13 и 14, выполненных в виде электронных регистраторов и размещенных на заданном расстоянии друг от друга. Контейнер 11 с калиброванными шариками установлен таким образом, что его нижняя задвижка отстоит от верхней метки на расстояние, необходимое для того, чтобы падающий шарик, двигаясь в вязкой жидкости, потерял ускорение за счет силы, препятствующей его падению, и в зоне между чувствительными элементами двигался равномерно и прямолинейно (на фиг. 2 дана принципиальная схема измерения вязкости жидкости с падающим шариком:  -расстояние от нижней задвижки контейнера с шариками до верхнего чувствительного элемента А;
-расстояние от нижней задвижки контейнера с шариками до верхнего чувствительного элемента А;  - расстояние между верхним А и нижним В чувствительными элементами, которое шарик проходит с равномерной скоростью; FA и FT - силы, действующие на шарик, Тс - их равнодействующая).
- расстояние между верхним А и нижним В чувствительными элементами, которое шарик проходит с равномерной скоростью; FA и FT - силы, действующие на шарик, Тс - их равнодействующая).
В резервном режиме, в случае проведения экспресс-измерений, погружаемый модуль движется равномерно с минимальной (достаточно малой) скоростью, при которой процедура измерения проводится практически аналогично рассмотренной выше для работы в основном режиме.
Однако следует принять во внимание, что условие «достаточно малой» скорости имеет относительный характер, поскольку фактическая величина допускаемых скоростей зависит от размеров движущегося тела и от вязкости жидкости и в каждом конкретном случае устанавливается с учетом вышеупомянутых параметров.
При движении твердых тел в ньютоновской жидкости возникают силы сопротивления, которые при небольших скоростях, когда за телом нет вихрей (ламинарное течение), обусловлены только вязкостью жидкости. В этом случае прилегающие к телу слои жидкости движутся вместе с телом, однако слои, граничащие с ними, также увлекаются в движение силами сцепления, при этом возникают силы, тормозящие относительное движение твердого тела и жидкости. Схема относительного перемещения соседних слоев жидкости в ламинарные течения показана на фиг. 3
Помимо этого, механизм возникновения сил сопротивления связан с образованием вихрей и различием скоростей движения жидкости перед телом и за ним (фиг. 4). Давление в стационарном потоке жидкости меняется в зависимости от скорости потока таким образом, что в области вихрей оно существенно уменьшается, при этом возрастает сопротивление движению.
Если движение тела в жидкости происходит медленно, без образования вихрей, то сила сопротивления возникает только в соответствии с первым механизмом движения и обусловлена только вязкостью жидкости, величину которой для тел сферической формы определяют по формуле Стокса.
Итак, подобрав оптимальную скорость перемещения и отрегулировав соответствующим образом ход судна, на котором находится устройство, можно с его помощью осуществлять экспресс-измерения по методике, разработанной для измерений в основном режиме при стационарном положении устройства.
После проведенной аналогично основному режиму подготовки по поступившему со второго выхода автономного дистанционного пульта 5 на вход подъемно-опускающего устройства 1 четвертому управляющему сигналу устанавливается минимальная скорость движения тросовой тяги 2 и приводится в движение погружаемый модуль. На вход 1 поступает набегающий поток жидкости и попадает в аналитический блок 9, вытесняя находящуюся там жидкость через выход в его верхней части.
Непосредственный процесс измерения начинается с подачей четвертого управляющего сигнала, поступающего с первого выхода автономного пульта 5 через беспроводной канал 6 обмена информацией на вход блока 4 управления и передачи информации, находящегося в герметичной капсуле 3. По сигналу с первого выхода блока 4, поступившему на блок 7, управляющий сбрасыванием шариков, отодвигается нижняя задвижка контейнера 11 и калиброванный шарик 15 падает в несмачиваемый измерительный цилиндр 12. И далее процедура измерения повторяется аналогично рассмотренной выше для работы в основном режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| Автономный пожарный модуль контейнерного типа | 2023 |
|
RU2813419C1 |
| СПОСОБ УПРАВЛЕНИЯ ФОНТАННОЙ АРМАТУРОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2596175C1 |
| Система многопараметрического мониторинга района техногенной аварии | 2024 |
|
RU2840313C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ РЕЗЕРВУАРОВ И УРОВНЯ ЖИДКОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2071596C1 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И СБРАСЫВАНИЯ СПАСАТЕЛЬНОГО ПЛОТА | 2002 |
|
RU2236982C2 |
| Запорно-пусковое устройство пожарного трубопровода | 1990 |
|
SU1719655A1 |
| УСТРОЙСТВО ДЛЯ ЦИКЛИЧЕСКОГО ПОГРУЖЕНИЯ И ВСПЛЫТИЯ МОРСКОГО БУЯ | 2019 |
|
RU2733550C1 |
| СПЕЦАВТОМОБИЛЬ ДЛЯ ТРАНСПОРТИРОВАНИЯ И ВРЕМЕННОГО ХРАНЕНИЯ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ | 2010 |
|
RU2446962C2 |



Изобретение относится к области измерительной техники, а именно к устройствам измерения вязкости жидкости в условиях высокого давления, и может найти применение для обнаружения на больших глубинах подводных морских объектов с помощью мониторинга вязкости морской воды. Устройство для измерения вязкости жидкости в условиях высокого давления с помощью падающего шарика содержит аналитический блок в виде вертикального цилиндра, снабженного обводной трубой с диаметром, меньшим, чем диаметр цилиндра, соединенной с ним гидравлическим сопротивлением, и средствами фиксации времени прохождения падающим шариком заданного расстояния в вязкой жидкости, цилиндр снабжен приемной воронкой, контейнером для шариков с двумя задвижками и помещен в корпус, выполненный с двумя входными отверстиями в нижней части, снабженными заслонкой, и выходным отверстием в верхней части, при этом устройство дополнительно содержит герметичную капсулу с размещенными в ней блоком управления и передачи информации, связанным с заслонками входных отверстий аналитического блока, а также блоком, управляющим сбрасыванием шариков, связанным с контейнером для их хранения, и регистрирующим блоком, при этом вышеупомянутая капсула вместе с аналитическим блоком входит в состав погружаемого модуля, связанного с подъемно-опускающим механизмом; причем устройство снабжено автономным пультом оператора, посредством беспроводного канала дистанционно связанным кодированной связью с блоком управления и передачи информации, блоком, управляющим сбрасыванием шариков, регистрирующим блоком и подъемно-опускающим механизмом. Техническим результатом является расширение возможностей прибора, за счет обеспечения измерений вязкости в условиях высокого статического давления и дистанционного управления процессом измерений и повышение точности измерений. 4 ил.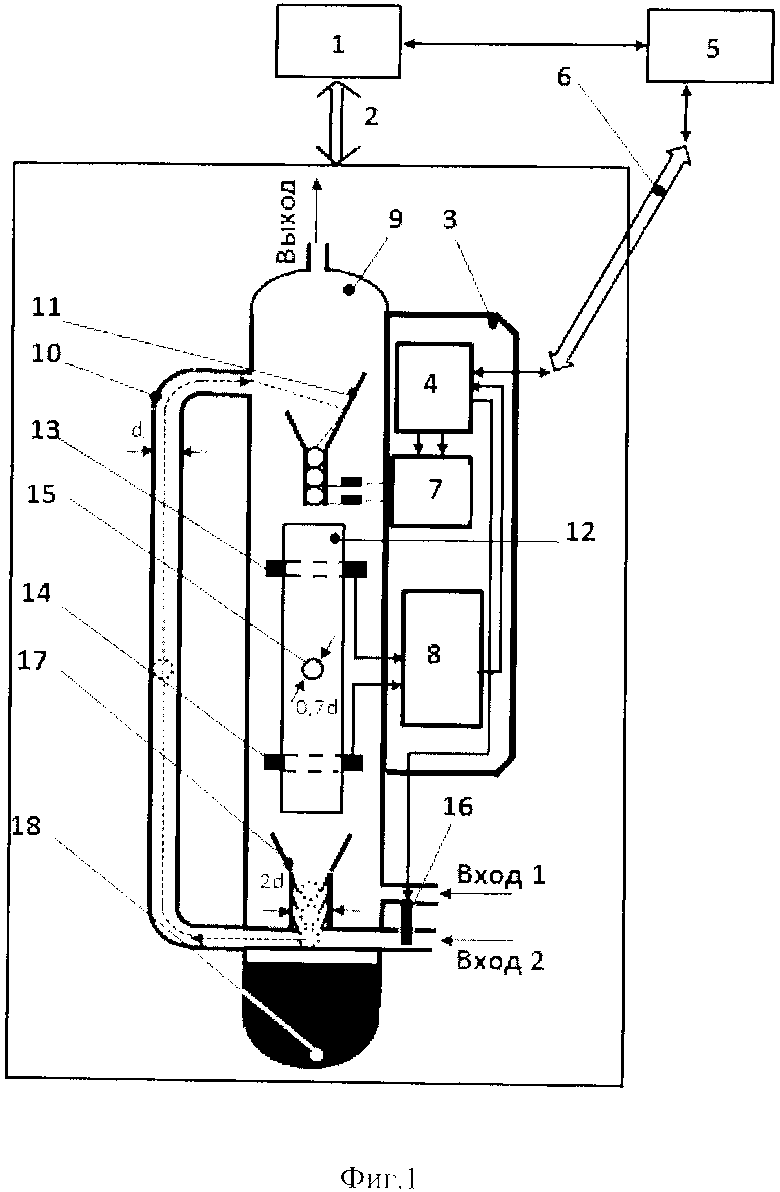
Устройство для измерения вязкости жидкости в условиях высокого давления с помощью падающего шарика, содержащее аналитический блок в виде вертикального цилиндра, снабженного обводной трубой с диаметром, меньшим, чем диаметр цилиндра, соединенной с ним гидравлическим сопротивлением, и средствами фиксации времени прохождения падающим шариком заданного расстояния в вязкой жидкости, отличающееся тем, что упомянутый цилиндр снабжен приемной воронкой, контейнером для шариков с двумя задвижками и помещен в корпус, выполненный с двумя входными отверстиями в нижней части, снабженными заслонкой, и выходным отверстием в верхней части, при этом устройство дополнительно содержит герметичную капсулу с размещенными в ней блоком управления и передачи информации, связанным с заслонками входных отверстий аналитического блока, а также блоком, управляющим сбрасыванием шариков, связанным с контейнером для их хранения, и регистрирующим блоком, при этом вышеупомянутая капсула вместе с аналитическим блоком входит в состав погружаемого модуля, связанного с подъемно-опускающим механизмом; причем устройство снабжено автономным пультом оператора, посредством беспроводного канала дистанционно связанным кодированной связью с блоком управления и передачи информации, блоком, управляющим сбрасыванием шариков, регистрирующим блоком и подъемно-опускающим механизмом.
| Вискозиметр с падающим шариком | 1961 |
|
SU151103A1 |
| Шариковый вискозиметр | 1977 |
|
SU735966A1 |
| ВИСКОЗИМЕТР | 1994 |
|
RU2094770C1 |
| CN 106323814 A, 11.01.2017 | |||
| US 7412877 B1, 19.08.2008. | |||

