Изобретение относится к мобильному автоматизированному комплексу контроля наземной (надводной) обстановки, включающему транспортное средство, выполненное преимущественно в виде автомобиля, внутри базового шасси которого размещена аппаратура системы обнаружения и распознавания объектов слежения.
Ближайший аналог в ходе поиска не обнаружен.
Техническая задача, на решение которой направлено данное предложение, состоит в создании мобильного транспортного радиоэлектронного комплекса нового поколения, обладающего тактическими и техническими характеристиками, позволяющими вести обнаружение и распознавание неподвижных и движущихся целей на дальности до 15 км. Кроме того, указанный комплекс характеризуется сравнительно небольшими размерами и позволяет обеспечить надежность, энергосберегаемость и быстродействие всех входящих в него систем, а также удобство пользования ими.
Поставленная задача решена в изобретении следующей совокупностью признаков.
Наземный транспортный комплекс для обнаружения и распознавания объектов содержит транспортное средство, преимущественно выполненное в виде автомобиля, в задней части крыши кузова которого образованы два люка, а салон разделен поперечной силовой перегородкой на два отсека: водительский и аппаратный. В последнем установлены соединенные с приводами два подъемно-мачтовых приспособления, включающих стойки, верхние части которых снабжены опорно-поворотными средствами с установленными на них и соединенными с системой электропитания радиоэлектронными датчиками системы обнаружения и распознавания объектов, выполненными с возможностью прохождения через соответствующие люки и размещения в рабочем положении над крышей кузова автомобиля. Над датчиками закреплены крышки люков, а средство управления датчиками и средство отображения данных установлены на силовой перегородке.
Один радиоэлектронный датчик комплекса выполнен в виде радиолокационной станции, снабженной магнитным компасом, а другой объединяет в себе тепловизор, видеокамеру и лазерный дальномер.
Каждое опорно-поворотное средство выполнено с возможностью перемещения в двух плоскостях: азимутальной и угломестной.
Нижний конец каждой стойки закреплен на полу аппаратного отсека салона автомобиля посредством опорной плиты, а верхний соединен с силовой перегородкой посредством кронштейна.
На каждой стойке ниже опорно-поворотного средства закреплена дополнительная крышка для перекрытия люка в рабочем положении комплекса.
Средство управления датчиками и средство отображения данных установлены на силовой перегородке либо со стороны водительского отсека салона автомобиля, либо со стороны его аппаратного отсека, либо врезаны в нее.
В переднюю панель водительского отсека комплекса встроены монитор для контроля управления режимами работ систем комплекса и УКВ радиостанция.
Водительский или аппаратный отсек салона автомобиля оборудован креслом оператора, установленным с возможностью вращения вокруг вертикальной оси и перемещения вдоль продольной оси автомобиля.
Комплекс может быть оборудован выносным прожектором и/или сигнально-громкоговорящей установкой, а также бензоагрегатом и/или дополнительной аккумуляторной батареей, входящей в систему электропитания оборудования комплекса.
Изобретение поясняется чертежами, где на фиг.1 изображен общий вид комплекса в рабочем положении; на фиг.2 - комплекс (вид сзади с открытой задней дверью) в нерабочем положении; на фиг.3 - то же в рабочем положении; на фиг.4 - силовая перегородка с рабочим местом оператора; на фиг.5 - передняя панель водительского отсека салона автомобиля.
Аппаратура комплекса, включающего наземное транспортное средство в виде автомобиля 1 и систему обнаружения и распознавания объектов слежения 2, размещается на самом современном легковом российском внедорожнике - серийном автомобиле «УА3-Патриот».
С целью размещения аппаратуры комплекса внутри базового шасси в автомобиле «УА3-Патриот» выполнены следующие конструктивные доработки:
- демонтированы задние сидения автомобиля,
- на расстоянии 850 мм от заднего борта автомобиля установлен основной опорный элемент конструкции в виде силовой металлической перегородки рамной конструкции из алюминиевого швеллера и листового алюминиевого сплава, на которой закреплена основная часть блоков аппаратуры комплекса (фиг.4);
- в образовавшемся за счет установки перегородки аппаратном отсеке 3 настелен усиленный пол 4 из листового алюминиевого сплава (фиг.2, фиг.3);
- в задней части левого борта автомобиля установлен разъем для подключения кабеля внешнего источника электропитания;
- в задней части крыши автомобиля выполнены два люка 5 и 6 (фиг.1) размером 400×380 и 490×260 мм, края которых усилены по периметру стальными рамными конструкциями;
- в кожухах задних надколесных ниш выполнены прорези для установки аккумуляторных батарей и размещены рамные каркасы;
- в салоне вдоль продольной оси автомобиля установлено одно вращающееся кресло оператора комплекса.
Основой конструкции изделия, которая объединяет основные радиоэлектронные блоки и узлы аппаратуры, является силовая перегородка, установленная в салоне автомобиля и разделяющая его на две части:
непосредственно салон для размещения экипажа (водительский отсек - фиг.5) и аппаратный отсек 3.
Конструктивно блоки и узлы аппаратуры могут закрепляться на перегородке в трех вариантах:
- со стороны салона;
- со стороны аппаратного отсека;
- врезанными в перегородку.
Кабельная сеть изделия размещена и закреплена на перегородке со стороны аппаратного отсека 3. Разъемы кабелей, служащих для подключения блоков, находящихся в салоне, разведены к блокам через отверстия в перегородке.
С двух сторон силовая перегородка закрыта декоративными панелями, так что образуется четырехслойная конструкция типа «сэндвич».
Основные датчики комплекса - оптико-электронный модуль 7 (ОЭМ) и радиолокационный модуль 8 (РЛМ) размещены на двух унифицированных конструкциях, представляющих собой подъемно-мачтовые приспособления со стойками 9 (ПМУ) с закрепленными на них в верхней части опорно-поворотными средствами 10 (ОПУ), управляемыми с помощью электродвигателей.
Входящие в комплекс радиолокационный и оптико-электронный модули связаны единым алгоритмом управления, обработки, документирования, отображения и передачи информации. Всесуточность и всепогодность комплекса обеспечивается сочетанием радиоэлектронных датчиков, работающих в сантиметровом (9 ГГц), ближнем (10 микрон) и дальнем (1,5 микрон) инфракрасном, а также видимом диапазонах спектра.
Электродвигатели ПМУ размещаются на полу 4 отсека, на стойке 9 ПМУ закреплена нижняя крышка 11 люка, а сама стойка крепится к полу с помощью опорной плиты, а к силовой перегородке в верхней части с помощью кронштейна (не показан).
На усиленном полу в аппаратном отсеке кроме ПМУ с электродвигателями размещены и закреплены блок вторичного электропитания (изделие «Дубровник») и на специальных опорных стойках, установленных в вырезах кожухов надколесных ниш, аккумуляторные батареи 6 СТ 190.
Аппаратура, расположенная на ОПУ ПМУ, поднимается из походного (нерабочего) в рабочее положение с помощью приводов и ременных передач специального профиля.
Конструкция каждого ПМУ имеет две крышки: верхнюю 12 и нижнюю 11 (фиг.1) и рассчитана таким образом, чтобы в походном положении люки 5 и 6 в крыше автомобиля герметично закрывались верхними крышками, а в рабочем положении - нижними. Это защищает внутренний объем аппаратного отсека от атмосферных осадков как в походном, так и в рабочем положении.
Аппаратура, размещенная на ОПУ 10, имеет возможность вращаться со скоростями до 65 градусов в двух плоскостях (азимутальной и угломестной) в пределах допустимых углов поворота, в результате чего оптические оси полей зрения ОЭМ 7 и электрическая ось антенны РЛМ 8 перемещаются в пространстве и имеют возможность занимать положение, требуемое для обнаружения или распознавания наземных целей.
Например, ОПУ обеспечивают сканирование размещаемой на них аппаратуры в пределах 360 градусов по азимуту и ±30 градусов от горизонта по углу места.
Это достигается наличием в каждом ОПУ двух приводов, состоящих из электродвигателя, ременной передачи, шкивов и датчика угла, а также контроллера, обрабатывающего приходящие на него с процессорных блоков команды управления.
РЛМ - это твердотельная цифровая когерентная радиолокационная станция (РЛС) 3-х см диапазона с системой селекции движущихся целей (СДЦ). РЛС имеет системы автоматического сопровождения движущихся целей с отображением информации на фоне цифровой карты местности, а также режим прослушивания доплеровских сигналов от целей на наушниках и вывода этих сигналов (спектров) в графическом виде на монитор РМО.
Дальность обнаружения человека с помощью входящей в предложенный комплекс РЛС составляет 5 км, а грузового автомобиля - 12 км. Станция имеет высокую точность измерения координат: 5 м по дальности и 4 градуса по углу.
РЛС обеспечивает режим управления ОЭМ (режим целеуказания), в котором оптическая ось оптико-электронного модуля автоматически доворачивается на выбранную оператором комплекса цель, а также режимы документирования информации о целях, взятых на сопровождение (с последующим просмотром обстановки), и вывода звуковых сигналов от цели на наушники.
Программное обеспечение ОЭМ разработано таким образом, чтобы обеспечить независимо от типа датчика (видеокамера или тепловизор) выполнение широкого спектра унифицированных функций:
- отображение информации, находящейся в поле зрения прибора;
- осуществление режима сканирования по программируемой оператором траектории;
- создание панорам местности (до 15-ти точек) с возможностью быстрого перевода поля зрения датчика в нужные точки панорамы (до 15-ти точек);
- документирование видео и тепловизионной информации в виде отдельных кадров или видеороликом с возможностью последующего просмотра;
- функционирование режима «детектора движения» во всем поле зрения или же в выбранных оператором «окнах» с автоматическим документированием только движущихся целей;
- функционирование режима автоматического вывода на экран изображения с максимальным увеличением на объект, зарегистрированный детектором движения;
- автоматический вывод звуковых или голосовых сигналов о наличии в зоне обзора ОЭМ движущихся целей.
Комплекс снабжен видеокамерой с оптикой 25-ти кратного увеличения, что позволяет при достаточной освещенности распознавать объекты типа «человек» на дальностях до 5 км, а автомобили - до 8 км. В этих же пределах дальностей стабильно работает детектор движения.
Дальности распознавания объектов с помощью тепловизора зависят от установленного типа прибора и находятся в интервале от 1 до 5 км.
В комплексе функционирует двухпроцессорная система, обеспечивающая работу рабочего места оператора, рабочего места командира, радиолокационного и оптико-электронного модулей, системы спутниковой навигации и ориентирования на местности. В состав системы обработки и документирования информации входят два унифицированных процессорных модуля, преобразователь интерфейсов, коммутатор и консоли управления ПМУ и ОПУ.
По желанию потребителя с целью повышения стойкости к механическим воздействиям вычислительных средств комплекса вместо жесткого диска может быть установлен ФЛЭШ-диск.
Специальное программное обеспечение комплекса функционирует в операционных системах Windows XP (оптико-электронный модуль) и Mandrake Linux (радиолокационный модуль).
Кроме основного рабочего места оператора (фиг.4), с которого осуществляется управление режимами работы всех систем комплекса, изделие имеет монитор рабочего места командира (РМК), который конструктивно встроен в переднюю панель салона автомобиля (фиг.5).
На штатное место в кассету для автомобильного приемника установлена УКВ-радиостанция, габаритные размеры которой соответствуют размерам кассеты автомобиля.
Между сиденьями водительского отсека размещены органы управления системой жизнеобеспечения комплекса и сигнально-громкоговорящей установкой.
Комплекс рассчитан на экипаж (расчет) из трех человек: водитель, командир расчета и оператор, при этом вся аппаратура может управляться одним оператором, который размещается на специальном кресле, которое может вращаться вокруг вертикальной оси и передвигаться вдоль продольной оси автомобиля. Кресло имеет раздельные регулировки сиденья, спинки и подлокотников, что позволяет в условиях ограниченного объема салона выставить такое его положение, которое будет максимально удобно для оператора. В походном положении оператор размещается лицом по ходу автомобиля, в рабочем положении - лицом к пультам на перегородке салона.
Для мобильных комплексов важной характеристикой является возможность их автономного ориентирования и топографической привязки к местности, а также позиционирования положения базового шасси.
В предложенном комплексе для определения углов наклона шасси при выборе позиции используется инклинометр, для привязки осей координат РЛС к северу - электронный магнитный компас с точностью 0,1 градуса, для определения местоположения изделия с его отображением на ЦКМ - спутниковая навигационная GPS-система.
Система электропитания комплекса выполнена с тройным резервированием: аппаратура комплекса может запитываться от промышленной сети 220 В, 50 Гц через встроенный блок вторичного электропитания с выходным напряжением 24 В постоянного тока (изделие «Дубровник»), от входящего в состав комплекса возимого бензоагрегата мощностью 2КВт или от специальной аккумуляторной батареи, размещаемой в заднем отсеке.
Блок питания «Дубровник» служит для преобразования напряжения переменного тока 220 В, 50 Гц в постоянное напряжение 24 В и подключается к изделию с пульта оператора только при использовании внешних источников питания (промышленная сеть или бензоэлектроагрегат).
Образец в базовой комплектации содержит один из самых экономичных бензоагрегатов, имеющий минимальные габариты и вес -HONDA 20i. При массе 21 кг и выходной мощности 2КВт он имеет расход топлива 0,4 литра на 1 час работы. Таким образом, без дозаправки топливом агрегат может обеспечивать изделие электропитанием в течение 10 часов.
Аккумуляторные батареи могут применяться двух типов - 6 СТ 190 емкостью 190 а/ч или специальная батарея из элементов 4PzS-240 емкостью 240 а/ч, что обеспечивает работу комплекса без подзарядки в течение 17 часов.
Аккумуляторные батареи вырабатывают постоянное напряжение 24 В и являются автономным источником питания изделия, который используется в следующих случаях:
- отсутствия промышленной сети переменного тока 220 В, 50 Гц;
- невозможности применения по какой-либо причине бензоэлектроагрегата;
- при необходимости работы с изделием без выхода расчета из
салона автомобиля.
Поскольку комплекс ориентирован на применение у нескольких заказчиков, конструктивные, схемотехнические и программные решения, заложенные в него, многофункциональны и предполагают значительное количество опций под конкретного потребителя. В частности, в его состав может быть включен выносной прожектор (устанавливается на треноге) Мегарэй-175 и сигнально-громкоговорящая установка СГУ-200 «Вепрь» в варианте скрытой установки.
Использование цифровых карт местности и приборов спутниковой навигации в совокупности со специальными алгоритмами расчета зон прямой видимости с позиции местоположения комплекса, позволяет просто и быстро (в течение нескольких десятков секунд) определить эффективность выбора позиции. Эта функция осуществляется без выхода экипажа из салона автомобиля, при этом аппаратура комплекса, которая могла бы быть обнаружена извне, не включается.
Вообще, в походном положении этот специальный автомобиль трудно отличить от обычного, а в рабочее положение комплекс приводится всего за пять минут практически бесшумно с помощью специальных подъемно-мачтовых устройств.
Важными требованиями, предъявляемыми к аппаратуре комплекса, являются ее массово-габаритные характеристики и энергопотребление. Предложенное решение позволяет значительно минимизировать эти характеристики и размещать аппаратуру не только на шасси большой грузоподъемности, но и на легковых автомобилях. Пример тому - предложенный комплекс, аппаратура которого при всей ее многофункциональности потребляет всего 900 Вт и весит около 400 кг.
Технические характеристики шасси УА3-Патриот приведены в таблице.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАЗЕМНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2013 |
|
RU2530185C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| ПОДВИЖНОЙ ПОСТ ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ "ЗВЕРОБОЙ-М" | 2014 |
|
RU2563699C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2019 |
|
RU2742130C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ФОТОВИДЕОФИКСАЦИИ СОБЫТИЙ | 2014 |
|
RU2545406C1 |
| Мобильный комплекс мониторинга открытых участков местности | 2019 |
|
RU2708802C1 |
| ТРАНСПОРТИРУЕМЫЙ КОМПЛЕКС НАБЛЮДЕНИЯ "РЕДУТ" | 2014 |
|
RU2569202C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ МОДУЛЬ БОЛЬШОЙ ДАЛЬНОСТИ "ФОКУС-Д" | 2009 |
|
RU2427006C2 |
| НАЗЕМНЫЙ ПУНКТ УПРАВЛЕНИЯ РОБОТОТЕХНИЧЕСКИМИ КОМПЛЕКСАМИ | 2017 |
|
RU2661264C1 |
| МОБИЛЬНЫЙ НАЗЕМНЫЙ ПРИВОДНОЙ КОМПЛЕКС (ВАРИАНТЫ) | 2014 |
|
RU2556693C9 |
Изобретение относится к мобильному автоматизированному комплексу контроля наземной (надводной) обстановки, который включает транспортное средство (автомобиль). В задней части крыши кузова образованы два люка. Салон разделен поперечной силовой перегородкой на два отсека: водительский и аппаратный. В аппаратном отсеке установлены соединенные с приводами два пропускаемых через люки подъемно-мачтовых приспособления. Верхние части стоек снабжены опорно-поворотными средствами, выполненными с возможностью перемещения в двух плоскостях: азимутальной и угломестной. На опорно-поворотных средствах установлены радиоэлектронные датчики системы обнаружения и распознавания объектов. Один радиоэлектронный датчик выполнен в виде радиолокационной станции, снабженной магнитным компасом, а другой объединяет в себе тепловизор, видеокамеру и лазерный дальномер. Комплекс характеризуется малогабаритностью, энергосберегаемостью, быстродействием, удобством пользования и надежностью. 8 з.п. ф-лы, 5 ил., 1 табл.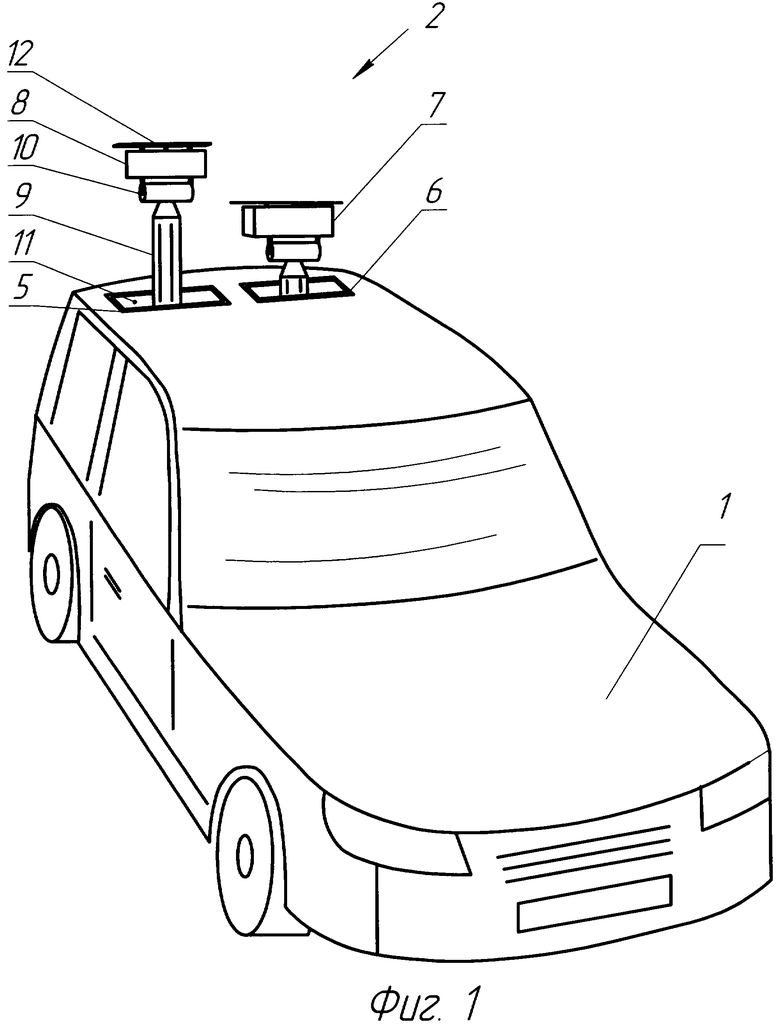
1. Наземный транспортный комплекс для обнаружения и распознавания объектов, содержащий транспортное средство преимущественно в виде автомобиля, в задней части крыши кузова которого образованы два люка, а салон разделен поперечной силовой перегородкой на два отсека: водительский и аппаратный, в последнем из которых установлены соединенные с приводами два подъемно-мачтовых приспособления, включающих стойки, верхние части которых снабжены опорно-поворотными средствами, выполненными с возможностью перемещения в двух плоскостях: азимутальной и угломестной, с установленными на них и соединенными с системой электропитания радиоэлектронными датчиками системы обнаружения и распознавания объектов, выполненными с возможностью прохождения через соответствующие люки и размещения в рабочем положении над крышей кузова автомобиля, при этом над датчиками закреплены крышки люков, а средство управления датчиками и средство отображения данных установлены на силовой перегородке.
2. Комплекс по п.1, отличающийся тем, что один радиоэлектронный датчик выполнен в виде радиолокационной станции, снабженной магнитным компасом, а другой объединяет в себе тепловизор, видеокамеру и лазерный дальномер.
3. Комплекс по п.1, отличающийся тем, что нижний конец каждой стойки закреплен на полу аппаратного отсека посредством опорной плиты, а верхний соединен с силовой перегородкой посредством кронштейна.
4. Комплекс по п.1, отличающийся тем, что на каждой стойке ниже опорно-поворотного средства закреплена дополнительная крышка для перекрытия люка в рабочем положении комплекса.
5. Комплекс по п.1, отличающийся тем, что средство управления датчиками и средство отображения данных установлены на силовой перегородке либо со стороны водительского отсека, либо со стороны аппаратного отсека, либо врезаны в нее.
6. Комплекс по п.1, отличающийся тем, что в переднюю панель водительского отсека встроен монитор для контроля управления режимами работ систем комплекса и УКВ радиостанция.
7. Комплекс по п.1, отличающийся тем, что водительский или аппаратный отсек оборудован креслом оператора, установленным с возможностью вращения вокруг вертикальной оси и перемещения вдоль продольной оси автомобиля.
8. Комплекс по п.1, отличающийся тем, что он оборудован выносным прожектором и/или сигнально-громкоговорящей установкой.
9. Комплекс по п.1, отличающийся тем, что он оборудован бензоагрегатом и/или дополнительной аккумуляторной батареей, входящей в систему электропитания оборудования комплекса.
| СПОСОБ ОБНАРУЖЕНИЯ, РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2003 |
|
RU2260847C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ВЕРТОЛЕТА С ИСПОЛЬЗОВАНИЕМ РАДИОЛОКАТОРА | 2003 |
|
RU2260815C2 |
| УСТРОЙСТВО ДЛЯ НАБЛЮДЕНИЯ ОБЪЕКТОВ | 1996 |
|
RU2089932C1 |
| КОРРЕЛЯЦИОННО-ЭКСТРЕМАЛЬНЫЙ КООРДИНАТОР ЦЕЛИ | 1989 |
|
RU2103707C1 |

