ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к судам для укладки трубопровода и, в частности, к системе для манипулирования стингером для такого судна. Изобретение также относится к использованию такого устройства при развертывании стингера.
2. Описание предшествующего уровня техники
[0002] Суда для укладки трубопровода, в целом, известны в различных конфигурациях. Они могут быть разделены по трем основным принципам работы, а именно: суда для укладки подводного трубопровода с вертикальным наращиванием для глубокой воды, вблизи развертывания вертикальной трубы, суда для горизонтальной укладки трубопровода на дно для горизонтального или с небольшим углом развертывания, и для укладки подводного трубопровода с барабана, где непрерывный трубопровод разматывается с барабана. По мере того как труба развертывается с судна, она будет иметь тенденцию следовать по цепной линии или подобной кривой в направлении морского дна; для того, чтобы обеспечить переход между этой кривой и областью на борту судна, предусматривается поддерживающая структура, продолжающаяся от судна и направляющая первый участок трубопровода до точки его освобождения. Эти поддерживающие структуры, известные как стингеры для операции горизонтальной укладки трубопровода на дно, как правило, продолжаются наружу от кормы судна на значительное количество метров. Стингеры могут быть сконструированы в секции и могут быть подняты, опущены и удлинены по мере необходимости. Кроме того, как правило, необходимо, чтобы стингер мог быть полностью убран, например, после завершения операции укладки трубопровода.
[0003] Одно устройство для развертывания стингера представлено в патенте США 2012219362, которое имеет конструкцию в виде портального крана над кормой судна, который поддерживает стингер посредством троса. Использование троса позволяет портальному крану поддерживать вес стингера и трубопровода, но не позволяет, однако поглощение сжимающих нагрузок или подъем на стингер или трубопровод. Все чаще суда должны выполнять множество функций, включающих операции подъема тяжеловесных грузов. С этой целью, кран для подъема тяжеловесных грузов на корме судна иногда может оказаться необходимым. Очевидно, что кран для подъема тяжеловесных грузов, не может быть расположен в пределах одного и того же пространства, как портальный кран для поддержки стингера. Другое судно раскрыто в публикации WO05123566, имеющее средство подъема тяжеловесных грузов на корме судна. Кран включает в себя трос и устройство лебедки в поднятом положении на корпусе крана для поддержки и подъема стингера. Устройство телескопической стрелы, использующее гидравлические домкраты, также предполагается.
[0004] В то время как существующие устройства и системы могут быть пригодны для многих обстоятельств, было бы желательно обеспечить систему для подъема, спуска и перемещения стингера, которая лучше интегрирована в структуру судна и может быть легко снята или уложена, когда она не используется.
КРАТКАЯ СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Согласно изобретению, предусмотрено судно для укладки трубопровода, снабженное краном, при этом кран имеет основание, опирающееся на структуру судна, прилегающее к борту судна, причем основание имеет полую внутреннюю часть, судно дополнительно снабжено системой для манипулирования стингером, продолжающуюся от борта судна, при этом система для манипулирования стингером содержит: тягу, продолжающуюся через отверстие из полой внутренней части к борту судна, для соединения со стингером, причем тяга устроена для передачи как растягивающей, так и сжимающей нагрузки; и структуры домкрата, расположенной внутри полой внутренней части основания крана, и установленной для вытягивания и втягивания тяги из внутренней части основания крана для подъема и опускания стингера. Путем обеспечения структуры домкрата в корпусе крана, могут быть достигнуты многочисленные преимущества. Во-первых, все движущиеся и машинные компоненты структуры домкрата заключены в основании крана, которое представляет собой замкнутое пространство, защищенное от окружающей среды. Кроме того, защита этих компонентов, ремонт и эксплуатация является облегченной за счет обеспечения доступа к полой внутренней части крана для персонала. Этот доступ может также быть достаточным для небольшого подъемного оборудования, такого как тележка с вильчатым захватом. Еще одним преимуществом является то, что опорная поверхность вне основания крана всей системы является минимальной, принадлежащей только самому стингеру и тяге. Пространство вокруг основания крана является, таким образом, оптимизированным для других операций.
[0006] Кран может быть любым тяжеловесным подъемным краном, подходящим для выполнения операций на борту судна. В общем случае, укладка трубопровода путем горизонтальной укладки на дно будет занимать место над кормой судна, и относительно стороны судна будет включать в себя любую сторону или борт судна, но в особенности корму. Предпочтительно, кран является судовым краном, имеющим, в целом круговое или многоугольное полое основание, на котором установлены основные структуры крана с возможностью поворота. Кран, предпочтительно, имеет номинальную грузоподъемность, по меньшей мере 2000 Т и может быть больше, чем 5000 Т. Основание может иметь размер, по меньшей мере, 15 метров в диаметре и может быть более 20 метров в диаметре. Следует понимать, что базовый размер будет определять максимальную возможную длину тяги, которая может быть втянута во внутреннюю часть основания. Тем не менее, также можно организовать расположение для тяги для выступания наружу через противоположную сторону основания, когда она полностью убрана, или допускать продолжение на основании на этой стороне. В одном конкретном варианте осуществления, тяга может быть снабжена соединительной деталью, позволяющей ей быть разделенной на две части.
[0007] Основание может быть полностью закрытым или иным образом защищать структуру от непогоды. Как было указано выше, соответствующие двери для доступа и люки могут быть предусмотрены во внутренней части. Отверстие, предусмотренное для того, чтобы позволить тяге продолжаться к стингеру для соединения со стингером, может быть снабжено крышкой для закрытия отверстия после втягивания или снятия тяги. Предпочтительно, отверстие находится в форме вертикальной прорези в основании, позволяющей наклону тяги во время вытягивания и втягивания.
[0008] В наиболее предпочтительном варианте осуществления структура домкрата расположена прилегающей к отверстию внутри полой внутренней части основания крана. Для обычной конфигурации, в которой стингер продолжается от кормы судна, отверстие будет располагаться прилегающим к корме, и структура домкрата будет располагаться на кормовой стороне основания. Предпочтительно, структура домкрата расположена между горизонтальной осью и свободным концом тяги. В этой конфигурации, структура домкрата эффективно работает при сжатии, при котором она толкает, для толкания в направлении свободного конца тяги для того, чтобы поднять стингер, тем самым вызывая только силу натяжения в тяге.
[0009] Наиболее предпочтительно, структура домкрата установлена с возможностью поворота к основанию крана для поворота вокруг горизонтальной оси. Для максимизации гибкости движения, в то же время минимизации размера отверстия в основании, горизонтальная ось может быть расположена прилегающей к отверстию. Структура домкрата может быть соединена с поворотной осью посредством универсального шарнира, позволяющего собственное выравнивание тяги на рамке зажима и натяжения стингера, как в горизонтальной, так и в вертикальной плоскостях. Таким образом, структура домкрата может поворачиваться, как того требует кинематика всей системы для манипулирования стингером. Различные структуры домкрата могут быть использованы, включая устройства механизма реечной передачи, механизмы храпового колеса с собачкой, и любые другие конструкции, которые могут эффективно обеспечить регулируемое поступательное перемещение тяги. Структура домкрата, предпочтительно, содержит гидравлическую машину, имеющую первое и второе, относительно подвижные захватные устройства, каждое из которых выполнено с возможностью зацепления с тягой. Захватные устройства могут быть перемещены относительно друг друга при помощи гидравлических цилиндров, выполненных с возможностью перемещения захватных устройств посредством заданного рабочего хода. Захватные устройства могут зацепляться с тягой любым известным способом. Наиболее предпочтительно, тяга содержит отверстия для зацепления пальцами, предусмотренными на захватных устройствах. Следует понимать, что каждая из этих конфигураций подразумевает также включение своей соответствующей кинематической альтернативы.
[0010] В альтернативном варианте осуществления изобретения структура домкрата содержит гидравлическую машину, выполненную с возможностью перемещения вдоль рельса, при этом тяга соединяется с гидравлической машиной. В самом широком смысле, термин рельс может считаться охватывающим любую структуру, которая позволяет перемещение структуры домкрата или аналогичного подъемного устройства от положения, отстоящего от борта судна, к положению ближе к борту судна. Это может охватывать один или несколько рельсов различных форм и размеров. Предпочтительно, рельс содержит пару рельсовых секций, предпочтительно, коробчатого сечения, посредством чего структура домкрата направляется посредством пары рельсовых секций, и тяга может поворачиваться между соответствующими рельсовыми секциями. Такая конфигурация дает большую стабильность в поддержке тяги с обеих сторон, в то же время, позволяя тяге поворачиваться как выше, так и ниже рельса во время перемещения структуры домкрата по рельсам.
[0011] Согласно важному аспекту изобретения структура домкрата может быть механически заблокирована при заданном вытягивании тяги. В этом контексте, механически заблокирована, подразумевает отношение к тому, что силы, действующие на тягу, передаются исключительно жесткими механическими соединениями, и что любая подъемная способность подъемной структуры является обойденной. Таким образом, как только требуемое положение стингера достигается, подъемная структура может быть незагруженной, и положение тяги сохраняется такой жесткой механической связью. Соединение может быть пальцем и отверстием, или тому подобным.
[0012] Наиболее предпочтительно, тяга является втягивающейся в полую внутреннюю часть в положение, в котором тяга не продолжается за пределы борта судна. Это положение тяги позволяет тяге избежать вмешательства в другие виды деятельности, например, подъем тяжеловесных грузов. Тяга может быть перемещена в это положение, когда стингер должен быть снят или после его снятия.
[0013] Хотя предыдущее обсуждение ссылается к одной тяге, наиболее предпочтительно система для манипулирования стингером содержит пару тяг и пару структур домкрата, которые работают параллельно для подъема и опускания стингера. Две тяги обеспечивают лучшую стабильность при подъеме и опускании стингера в том, что они обеспечивают более высокое сопротивление боковым нагрузкам. Дополнительно, задание размеров каждой из тяг и подъемных структур сокращается.
[0014] Изобретение также относится к комбинации судна для укладки трубопровода, имеющего систему для манипулирования стингером, со стингером, где стингер поворотно соединен с бортом судна ниже крана в точке поворота стингера и поворотно соединен с тягой в точке зацепления тяги для подъема и опускания стингера. Точка поворота стингера является, предпочтительно, горизонтальной осью, параллельной к забортной стороне судна, в частности, корме судна. В альтернативном варианте, точка поворота стингера может быть в виде сферического соединения, позволяющего дополнительную степень свободы.
[0015] Предпочтительно, стингер содержит первую удлиненную секцию стингера, имеющую жестко соединенную структуру натяжения, продолжающуюся сверху первой удлиненной секции стингера до точки зацепления тяги. Структура натяжения может содержать пару рамок зажима и натяжения, связанных вместе, а путь трубопровода вдоль стингера проходит через рамку зажима и натяжения.
[0016] Наиболее предпочтительно, стингер является съемным в море путем отсоединения от судна в точке поворота стингера и отсоединения от тяги в точке зацепления тяги, в результате чего стингер может быть поднят с помощью крана в положение хранения.
[0017] Изобретение также относится к способу развертывания стингера на судне для укладки трубопровода, имеющем кран с полым основанием, причем способ включает в себя этапы, на которых: обеспечивают систему для манипулирования стингером, расположенную, по меньшей мере, частично внутри полого основания, и имеющую жесткую тягу, продолжающуюся из основания и выше борта судна; поворотно соединяют стингер к борту судна для поворотного движения вокруг точки поворота стингера; соединяют тягу с точкой зацепления тяги на стингере на некотором расстоянии от точки поворота стингера; и эксплуатируют систему для манипулирования стингером для подъема или опускания стингера.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0018] Отличительные особенности и преимущества изобретения будут оценены со ссылкой на следующие чертежи нескольких примеров осуществления, на которых:
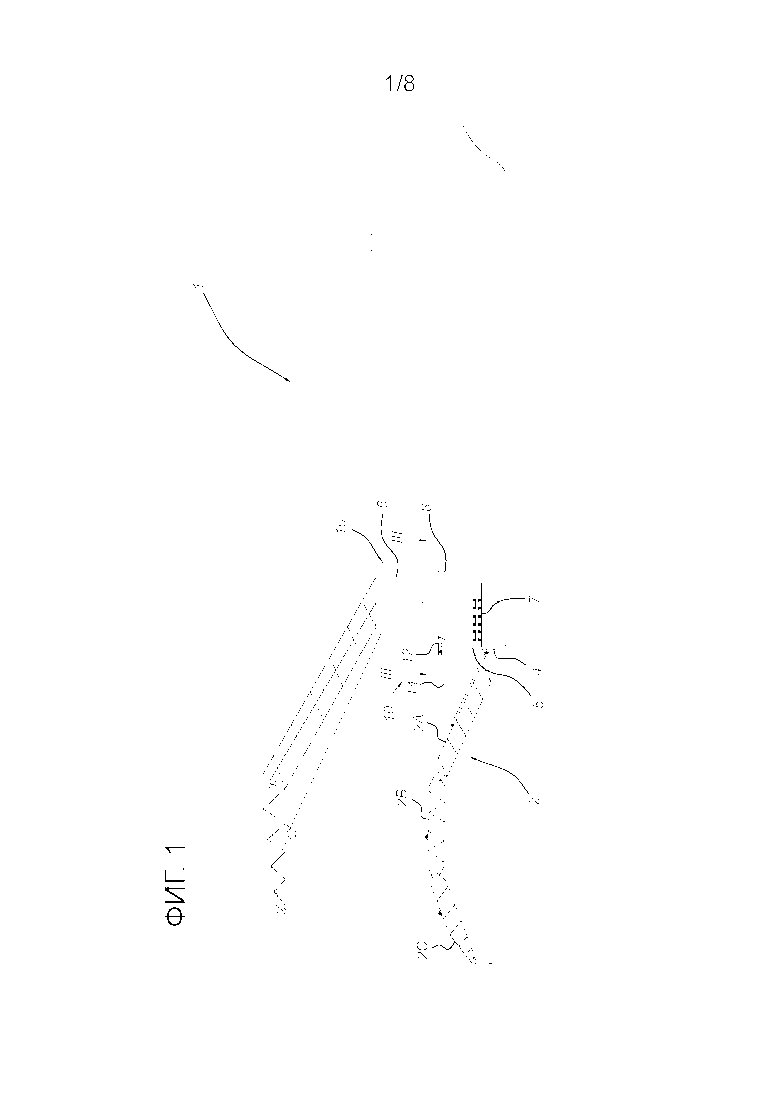
[0019] Фиг.1 представляет вид сбоку судна согласно настоящему изобретению;
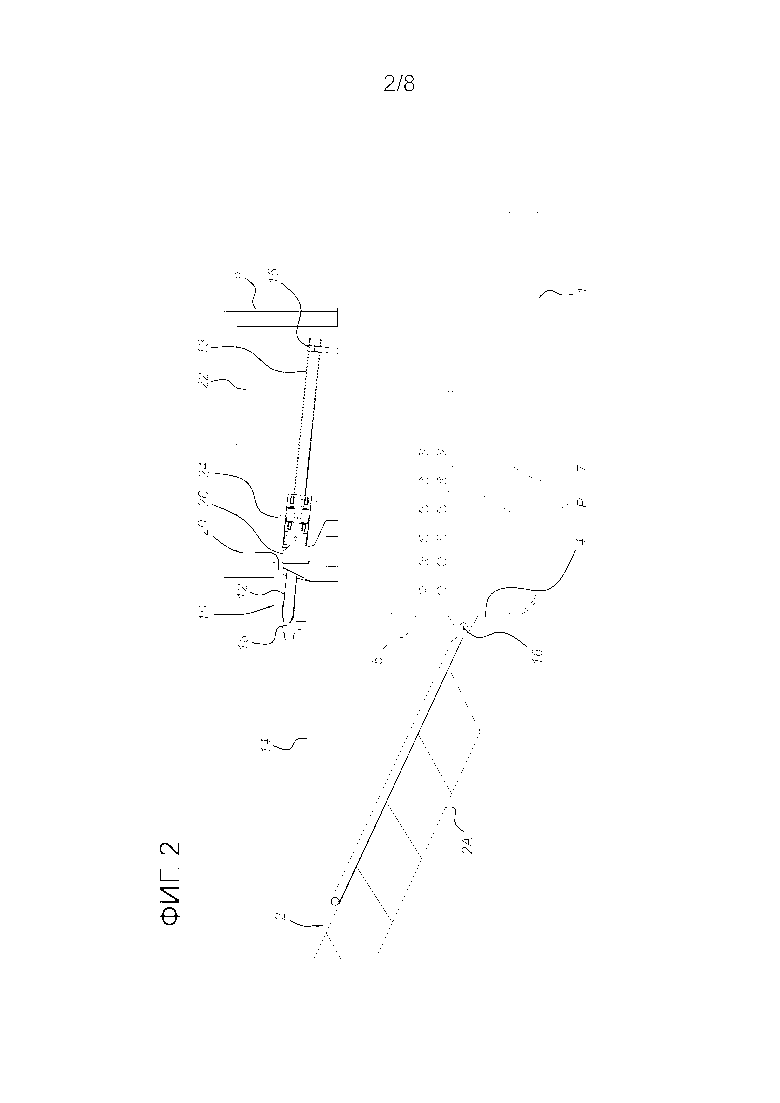
[0020] Фиг.2 представляет частичный вид сбоку системы для манипулирования стингером по фиг.1;
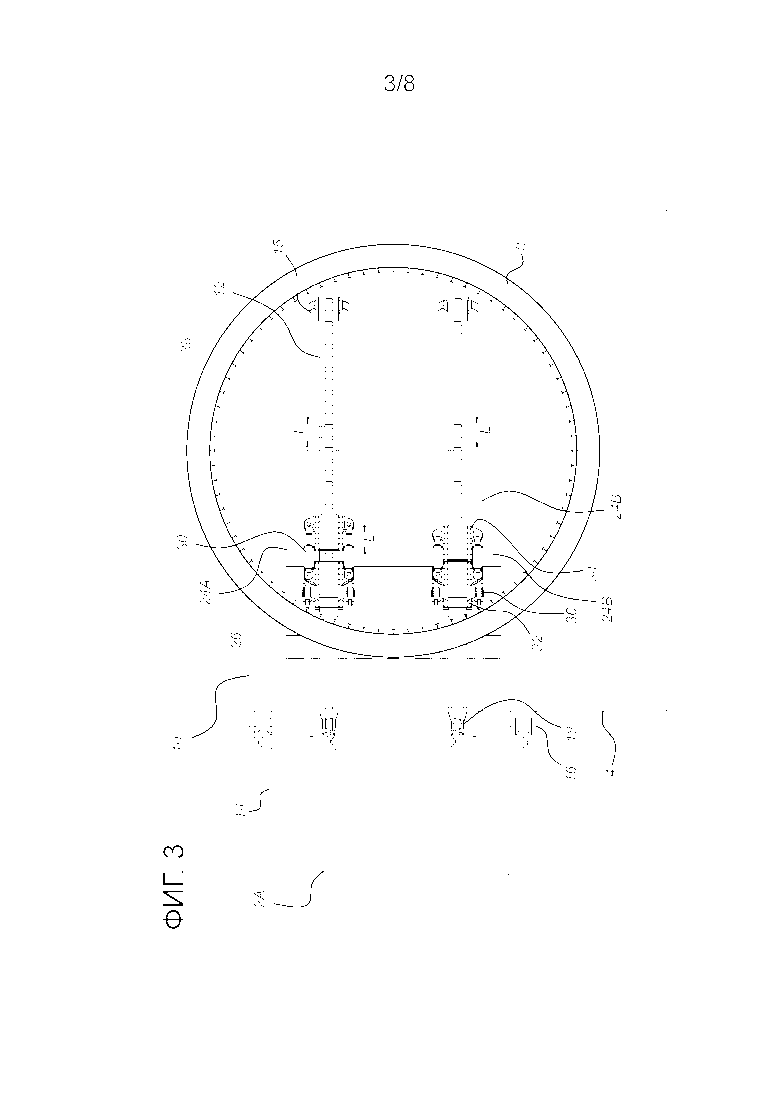
[0021] Фиг.3 представляет вид в разрезе сверху через часть системы для манипулирования стингером по фиг.1, взятый в направлении III-III;
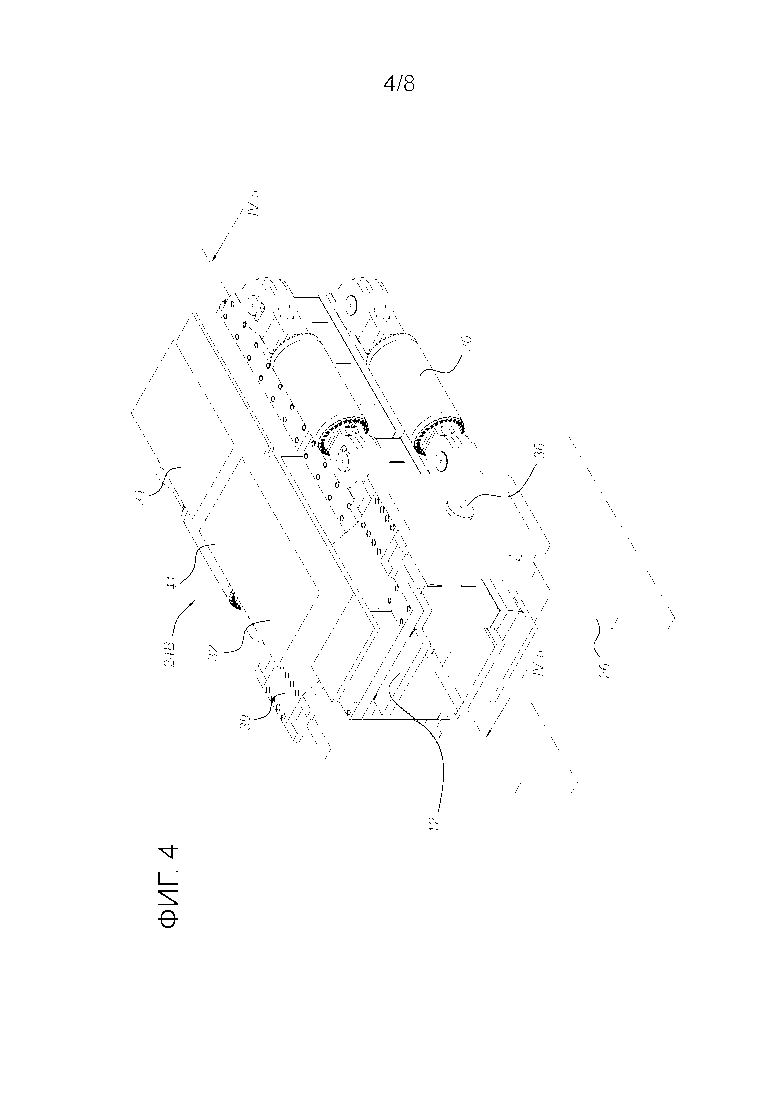
[0022] Фиг.4 представляет вид в перспективе структуры домкрата, по фиг.3;
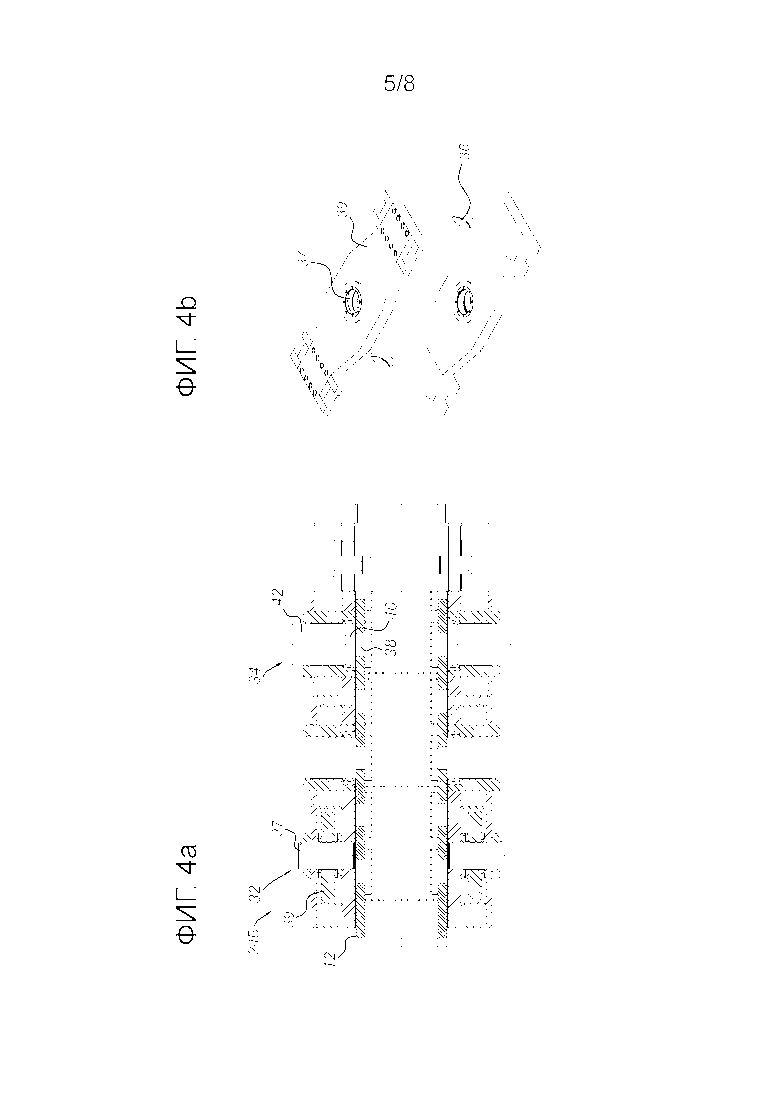
[0023] Фиг.4a представляет сечение через структуру домкрата по фиг.4 вдоль линии IVa;
[0024] Фиг.4b представляет вид части хомута, образующего часть универсального шарнира;
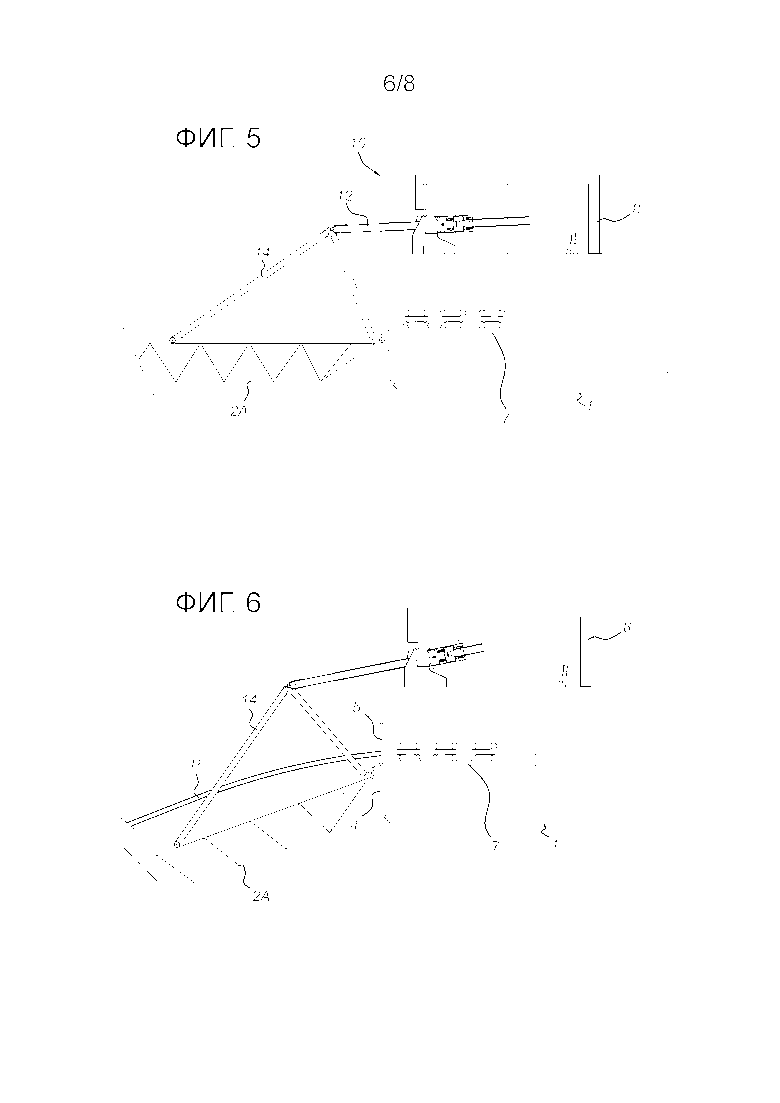
[0025] Фиг.5 представляет первую секцию стингера в горизонтальном положении;
[0026] Фиг.6 представляет первую секцию стингера в использовании;
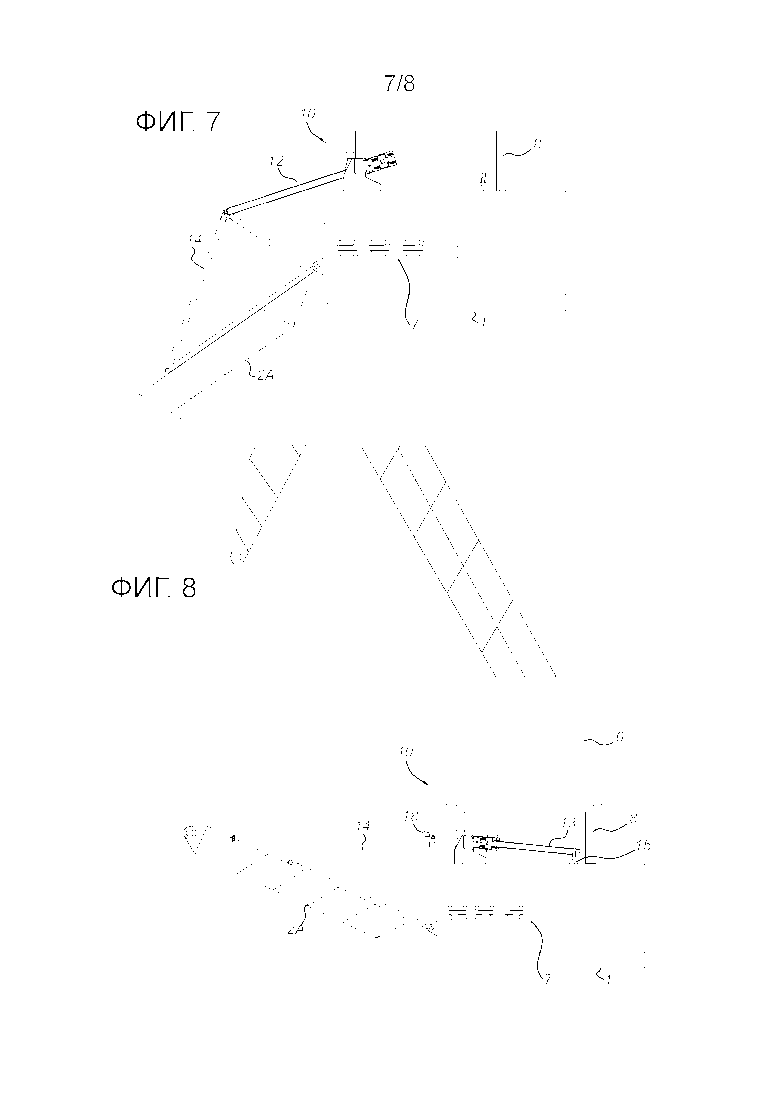
[0027] Фиг.7 представляет первую секцию стингера при своем максимальном угле развертывания;
[0028] Фиг.8 представляет первую секцию стингера, частично отсоединенную во время разборки; а также
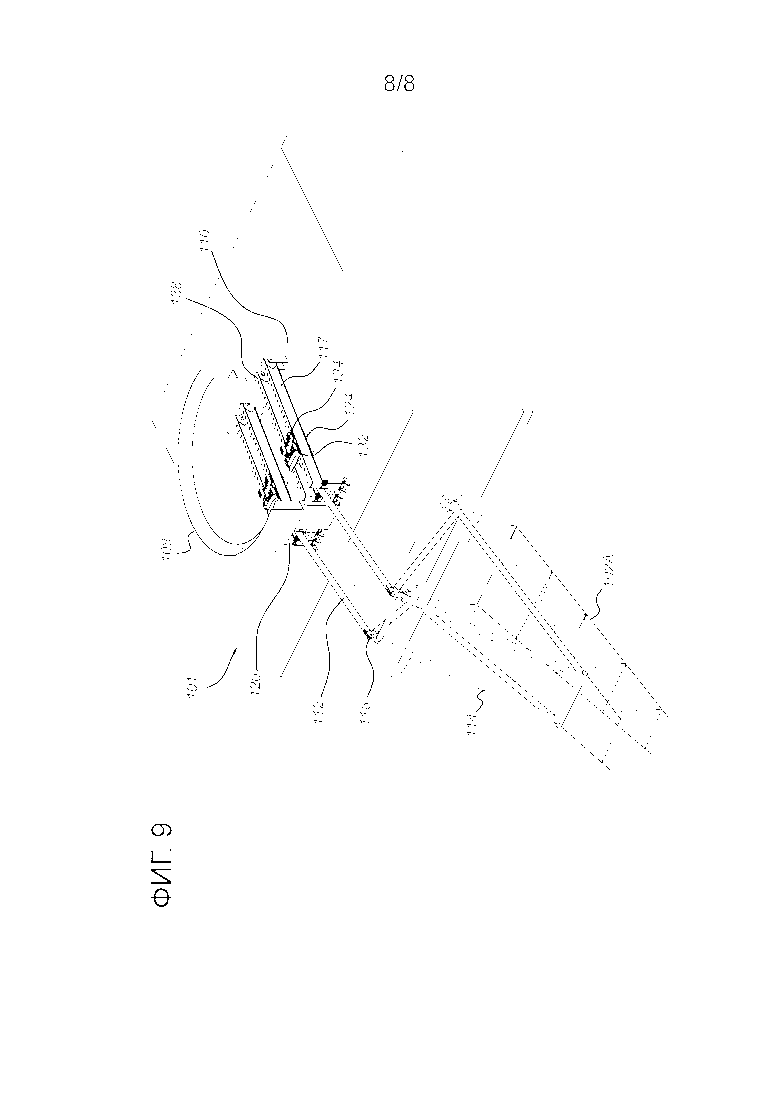
[0029] Фиг.9 представляет вид в перспективе второго варианта осуществления изобретения.
ОПИСАНИЕ ИЛЛЮСТРАТИВНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
[0030] Фиг.1 представляет вид сбоку судна 1 согласно настоящему изобретению, имеющего стингер 2, установленный за кормой 4 судна 1 для выполнения операции укладки трубопровода. Корма 4 снабжена створками 5, дающими доступ к трубоукладочной линии 7 для горизонтальной укладки трубопровода на дно, из которых трубопровод может быть развернут. Стингер 2 содержит некоторое количество секций 2A, 2B, 2C стингера. Судно 1 также снабжено судовым краном 6, установленным на полом основании 8 на корме 4 и выше стингера 2. Система 10 для манипулирования стингером включает в себя жесткие тяги 12, продолжающиеся из основания 8, и соединяющиеся со структурой 14 натяжения верхней стороны первой секции 2А стингера. На изображенном виде, стингер 2 находится в положении, поднятом над горизонталью и удерживаемом в положении посредством тяг 12. Вторая и третья секции 2b, 2C стингера поддерживаются посредством крана 6.
[0031] Фиг.2 представляет частичный вид сбоку стингера 2 и системы 10 для манипулирования стингером по фиг.1, на котором основание 8 крана было вырезано. Как можно видеть, первая секция 2А стингера является поворотной на корме 4 судна 1 на горизонтальном шарнире 16 стингера несколько ниже трубоукладочной линии 7. Тяги 12 соединены со структурой 14 натяжения в точке 18 зацепления тяги. Тяги 12 продолжаются через прорези 20 в полую внутреннюю часть 22 основания 8, и каждая из них зацепляется посредством поворотной структуры 24 домкрата, расположенной внутри полой внутренней части 22, и установленной на специально предназначенных соединительных кронштейнах 26, примыкающих к прорезям 20. В этом положении свободные концы 13 тяг 12 поддерживаются на седловинах 15 на переднем конце основания 8. В данном контексте, передний используется для обозначения направления судна, т.е. в сторону носовой части. Следует понимать, что для другой ориентации системы 10 для манипулирования стингером, движения будут переориентированы, соответственно.
[0032] Фиг.3 представляет собой вид в разрезе в плане через часть системы 10 для манипулирования стингером по фиг.1, взятом в направлении III-III по фиг.1. Как можно видеть на этом виде, система 10 для манипулирования стингером включает в себя две тяги 12, которые продолжаются параллельно друг другу в продольном направлении судна 1. Структуры 24А, 24В домкрата, каждая имеет первое и второе относительно подвижные захватные устройства 32, 34. Захватные устройства 32, 34 каждой из структур 24А, 24В домкрата соединены друг с другом посредством гидравлических цилиндров 30, в настоящем варианте осуществления два гидравлических цилиндра 30 предусмотрены по обе стороны от каждой структуры 24A, 24B домкрата. Каждая структура 24A, 24B домкрата является поворотной на соответствующем кронштейне 26 посредством зацепления первого захватного устройства 32 в месте оси 36 поворота домкрата. Второе захватное устройство 34 может перемещаться на длину L хода вдоль тяги в прямом направлении путем выдвижения гидравлических цилиндров 30. В показанном варианте осуществления, самая верхняя часть структуры 24A домкрата находится в выдвинутом положении со вторым захватным устройством 34, отстоящим на расстояние L от первого захватного устройства 32. Самая нижняя часть структуры 24B домкрата находится во втянутом положении со вторым захватным устройством 34 в контакте с первым захватным устройством 32. Кроме того, имеются отверстия 38, представленные на фиг.3, образованные через верхние стороны тяг 12. Отверстия 38 также расположены на расстоянии L друг от друга. Аналогичным образом, отверстия 38 образованы через нижние стороны тяг 12.
[0033] Фиг.4 представляет вид в перспективе структуры 24В домкрата по фиг.3. Как можно видеть на этой фигуре, тяга 12 продолжается через оба первое и второе захватные устройства 32, 34 структуры 24B поднятия домкратом. Также видимыми являются гидравлические цилиндры 30, соединяющие первое и второе захватные устройства 32, 34 вместе, и одна из осей 36 поворота домкрата, которая соединяет первое захватное устройство 32 к кронштейну 26 посредством хомута 39. Оболочки 41 привода пальца предусмотрены на верхней части и нижней части на каждом из первого и второго захватных устройств 32, 34.
[0034] Фиг.4a представляет сечение через структуру 24В домкрата по фиг.4 вдоль линии IVа, со снятыми оболочками 41 привода пальца. На этом виде, пальцы 40 выше и ниже тяги 12 и приводы 42 пальца могут быть видимы. Пальцы 40 первого захватного устройства 32 зацеплены в два отверстия 38 тяги 12. Каждый из приводов 42 пальца является гидравлическим цилиндром, управляемым посредством гидравлического электромагнитного клапана. Пальцы 40 второго захватного устройства 34 являются втянутыми. Также видимой на фиг.4a является вертикальная ось 37 поворота, которая проходит через хомут 39 и вместе с осью 36 поворота домкрата образует универсальное соединение для структуры 24В домкрата.
[0035] Фиг.4b представляет вид в перспективе хомута 39, показывающий расположение оси 36 поворота домкрата и вертикальной оси 37 поворота. Способность структуры 24В домкрата поворачиваться как в вертикальной плоскости вокруг оси 36 поворота домкрата, так и в горизонтальной плоскости вокруг вертикальной оси 37 поворота обеспечивает то, что первое захватное устройство 32 может самостоятельно выравниваться с тягой 12 и структурой 14 натяжения в горизонтальной плоскости.
[0036] На фигурах 5-7 представлены виды системы 10 для манипулирования стингером, соответствующей фиг.2, в различных положениях эксплуатации. Фиг.5 представляет первую секцию 2А стингера, частично опущенную в горизонтальное положение. Фиг.6 представляет первую секцию 2А стингера в положении использования, поддерживаемую развертывание трубопровода Р. Фиг.7 представляет первую секцию 2А стингера при ее максимальном угле развертывания. Фиг.8 представляет первую секцию 2А стингера, отсоединенную от тяги 12 во время демонтажа.
[0037] Функционирование системы 10 для манипулирования стингером теперь будет объяснено со ссылкой к фигурам 1-8. Как было описано, фигуры 1 и 2 изображают стингер 2 в его поднятом положении, как это может быть в случае перемещения с судном 1. Вес стингера 2 переносится посредством структуры 14 натяжения, тяг 12, и зацепленными пальцами 40 с первыми захватными устройствами 32. Первые захватные устройства 32 являются непосредственно механически зацепленными посредством оси 36 поворота домкрата к кронштейну 26. Таким образом, стингер 2 удерживается в положении посредством полностью механической схемы. Для того, чтобы опустить стингер 2, второе захватное устройство 34 для каждой из структур 24А, 24В домкрата перемещается вперед в положение, которое показано для структуры 24А домкрата на фиг.3. Это достигается за счет втягивания пальцев 40 соответствующего второго захватного устройства 34 из отверстий 38 с использованием приводов 42 пальца. После освобождения от его зацепления с отверстием 38, второе захватное устройство 34 может быть перемещено вперед вдоль тяги 12 посредством действия гидравлических цилиндров 30 на длину L хода. На этом этапе палец 40 будет выровнен со следующим отверстием 38 и может быть зацеплен посредством действия привода 42 пальца. Пальцы 40 являются активируемыми пружиной (не показана), но пальцы 40 могут входить в отверстия 38, только если соответствующие приводы 42 приводятся в действие в положение зацепления пальца. Следует понимать, что хотя фиг.3 представляет одну из структур 24А домкрата выдвинутой, в то время как другая структура 24B домкрата является втянутой, эта операция должна выполняться одновременно. Соответствующее управление предусмотрено для предотвращения работы иным образом. После того, как структуры 24А, 24В домкрата находятся в выдвинутом положении, гидравлические цилиндры 30 могут быть приведены в действие для принятия напряжения в тягах 12 через соответствующие вторые захватные устройства 34, таким образом, освобождая усилие на пальцы 40 первых захватных устройств 32. В этой точке, пальцы 40 первых захватных устройств 32 могут быть втянуты из соответствующих отверстий 38 в тягах 12. После того как первые захватные устройства 32 освобождены, гидравлические цилиндры 30 обеих структур 24A, 24B домкрата могут быть приведены в действие для опускания тяг 12 под весом стингера 2 до второго захватного устройства 34 зацепленного против первого захватного устройства, как показано при втянутом положении структуры 24А домкрата на фиг.3. В этой точке пальцы 40 первого захватного устройства 32 будет выровнены с новым отверстием 38 в тягах 12 и могут быть зацеплены посредством приводов 42 пальца. Эта последовательность может быть повторена шаг за шагом до тех пор, пока стингер 2 будет опущен в нужное положение. Следует понимать, что опускание тяг 12 вызывает опускание первой секции 2А стингера, и что остальные секции 2B, 2C стингера будут опущены соответствующими действиями крана 6.
[0038] Стингер 2 опускается через горизонтальное положение, представленное на фиг.5, к выбранному рабочему положению, представленному на фиг.6. После того, как стингер 2 достигает положения использования, представленного на фиг.6, опускание прекращается, и стингер 2 блокируется в положении. Стингер 2 обычно блокируется в своем рабочем или нерабочем положении посредством пальцев 40. Тем не менее, как только стингер 2 достигает какого-либо положения, два пальца 40 второго захватного устройства 34 вставляются в отверстия 38 тяги 12 с тем, чтобы обеспечить дополнительное удержание. В этом положении, трубопровод Р может быть выдвинут из трубоукладочной линии 7 через створки 5 на корме 4 судна 1 и развернут над стингером 2. Отмечается, что трубопровод Р выдвигается через структуру 14 натяжения, которая должна по этой причине обеспечить достаточное пространство для прохождения стыков и любого другого оборудования, предусмотренного на трубопроводе P.
[0039] Фиг.7 представляет стингер 2 в его самом нижнем положении для глубоководной укладки трубопровода. Тяги 12 являются полностью вытянутыми посредством их соответствующих структур 24 домкратов.
[0040] Подъем стингера 2 происходит путем обратной последовательности поднятия домкратом, описанной выше. При этом кран 6 может или не может оказывать помощь при подготовке к снятию стингера 2. Фиг.8 представляет первую секцию 2A стингера полностью поднятую при поддержке крана 6. Тяги 12 были отсоединены от точек 18 зацепления тяги и убраны полностью внутри основания 8 крана, где свободные концы 13 поддерживаются посредством седловин 15. Шарнир 16 стингера может быть затем отсоединен и первая секция 2А стингера может быть снята для хранения, например, на палубе судна.
[0041] Фиг.9 представляет вид в перспективе выреза судна 101 согласно альтернативному варианту осуществления изобретения, в котором одинаковые с первым вариантом осуществления элементы обозначены теми же ссылочными позициями, превосходящими на 100. Система 110 для манипулирования стингером по фиг.9, отличается от первого варианта осуществления тем, что структуры 124 домкрата являются подвижными вдоль рельсов 117, расположенных внутри основания 108 крана. Структуры 124 домкрата, каждая содержит первые 132 и вторые 134 захватные устройства, которые входят в зацепление с отверстиями 138, предусмотренными в рельсах 117. Зацепление с использованием пальцев и приводов пальца (не показаны) осуществляется таким же образом, как и в первом варианте осуществления. Тяги 112 являются поворотными на каждом из первых захватных устройств 132 и продолжаются наружу от основания 108 крана через прорези 120 для зацепления с точками 118 зацепления тяги на структуре 114 натяжения первой секции 102A стингера. В процессе работы, вариант осуществления по фиг.9 работает, по существу, таким же образом, как и на фигурах 1-8. Структуры 124 домкрата могут быть перемещены вдоль рельсов 117 от носовой части до кормовой части для подъема и опускания стингера 102.
[0042] Таким образом, изобретение было описано со ссылкой на некоторые варианты осуществления, описанные выше. Следует принимать во внимание, что эти варианты осуществления являются допускающими различные модификации и альтернативные формы, которые хорошо известны специалистам в данной области техники. Многие модификации в дополнение к описанным выше, могут быть сделаны к структурам и техническим приемам, описанным в данном документе, не отступая от сущности и объема изобретения. Соответственно, хотя конкретные варианты осуществления были описаны, они являются только примерами и не ограничивают объем настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРУБОУКЛАДОЧНОЕ СУДНО И СПОСОБ УКЛАДКИ ТРУБОПРОВОДА С СУДНА (ВАРИАНТЫ) | 2011 |
|
RU2550412C2 |
| Трубоукладочное судно, способ укладки трубопровода с судна и система внешних мостков для укладки трубопровода с судна | 2011 |
|
RU2673325C2 |
| СИСТЕМА ПЕРЕМЕЩЕНИЯ МОНТАЖНОГО СОЕДИНЕНИЯ | 2016 |
|
RU2702202C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРУБОУКЛАДОЧНОЕ СУДНО | 2013 |
|
RU2637257C2 |
| СПОСОБ УКЛАДКИ ТРУБОПРОВОДА С СУДНА И УСТРОЙСТВО ДЛЯ УКЛАДКИ ТРУБОПРОВОДА С СУДНА (ВАРИАНТЫ) | 2012 |
|
RU2607911C2 |
| МОРСКОЕ СУДНО ДЛЯ УКЛАДКИ СТАЛЬНЫХ ТРУБ, ГИБКИХ ЭЛЕМЕНТОВ И ПОДВОДНЫХ КОНСТРУКЦИЙ В ЛЕДОВЫХ УСЛОВИЯХ | 2012 |
|
RU2509677C1 |
| СУДНО-ТРУБОУКЛАДЧИК (ВАРИАНТЫ) И СПОСОБ ПРОКЛАДКИ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 1999 |
|
RU2230967C2 |
| УСТАНОВКА ДЛЯ ПОЧТИ ВЕРТИКАЛЬНОЙ ПРОКЛАДКИ ТРУБОПРОВОДА | 1994 |
|
RU2131550C1 |
| СУДНО-ТРУБОУКЛАДЧИК И СПОСОБ ПРОКЛАДКИ ТРУБОПРОВОДОВ | 1999 |
|
RU2229053C2 |
| НАПРАВЛЯЮЩАЯ КОНСТРУКЦИЯ ДЛЯ УКЛАДКИ ПО J-ОБРАЗНОЙ КРИВОЙ | 2017 |
|
RU2707691C1 |
Судно для укладки трубопровода имеет кран, имеющий основание с полой внутренней частью, и систему для манипулирования стингером для манипулирования стингером, продолжающимся от борта судна. Система для манипулирования стингером имеет тягу, продолжающуюся наружу через отверстие из полой внутренней части по направлению к борту судна для соединения со стингером. Тяга выполнена с возможностью передачи как растягивающей, так и сжимающей нагрузки. Структура домкрата, расположенная внутри полой внутренней части основания крана, установлена для вытягивания и втягивания тяги из внутренней части основания крана для подъема и опускания стингера. Универсальное соединение может быть предусмотрено для собственного выравнивания тяги к стингеру в горизонтальной плоскости. 2 н. и 17 з.п. ф-лы, 9 ил.
1. Судно для укладки трубопровода, снабженное краном, при этом кран имеет основание, опирающееся на структуру судна, прилегающую к борту судна, причем основание имеет полую внутреннюю часть, судно дополнительно снабжено системой для манипулирования стингером, продолжающимся от борта судна, при этом система для манипулирования стингером содержит:
- тягу, продолжающуюся наружу через отверстие из полой внутренней части к борту судна для соединения со стингером, причем тяга выполнена с возможностью передачи как растягивающей, так и сжимающей нагрузки;
- структуру домкрата, расположенную внутри полой внутренней части основания крана и установленную для вытягивания и втягивания тяги из внутренней части основания крана для подъема и опускания стингера.
2. Судно по п. 1, в котором кран является судовым краном, имеющим, в целом, круговое или многоугольное основание.
3. Судно по п. 1 или 2, в котором отверстие выполнено в форме вертикальной прорези в основании, позволяющей наклон тяги во время вытягивания и втягивания.
4. Судно по любому предшествующему пункту, в котором структура домкрата расположена прилегающей к отверстию.
5. Судно по любому предшествующему пункту, в котором структура домкрата является поворотно установленной на основании крана для поворота вокруг горизонтальной оси.
6. Судно по п. 5, в котором структура домкрата содержит гидравлическую машину, имеющую первое и второе относительно подвижные захватные устройства, которые выполнены с возможностью зацепления с тягой.
7. Судно по п. 6, в котором тяга содержит отверстия для зацепления пальцами, предусмотренными на захватных устройствах.
8. Судно по любому из пп. 5-7, в котором структура домкрата расположена между горизонтальной осью и свободным концом тяги.
9. Судно по любому из пп. 1-4, в котором структура домкрата содержит гидравлическую машину, выполненную с возможностью перемещения вдоль рельса, при этом тяга соединена с гидравлической машиной.
10. Судно по любому предшествующему пункту, в котором структура домкрата может быть механически заблокирована при данном вытягивании тяги.
11. Судно по любому предшествующему пункту, в котором тяга является втягивающейся в полую внутреннюю часть в положение, в котором тяга не продолжается за борт судна.
12. Судно по любому предшествующему пункту, в котором система для манипулирования стингером содержит пару тяг и пару структур домкрата, которые работают параллельно для подъема и опускания стингера.
13. Судно по любому предшествующему пункту, в котором структура домкрата установлена на судне посредством универсального шарнира, позволяющего собственное выравнивание тяги к рамке зажима и натяжения в горизонтальной плоскости.
14. Судно по любому предшествующему пункту, дополнительно содержащее стингер, при этом стингер поворотно соединен с бортом судна ниже крана в точке поворота стингера и поворотно соединен с тягой в точке зацепления тяги для подъема и опускания стингера.
15. Судно по п. 14, в котором стингер содержит первую удлиненную секцию стингера, имеющую жестко соединенную структуру натяжения, продолжающуюся сверху от первой удлиненной секции стингера к точке зацепления тяги.
16. Судно по п. 15, в котором структура натяжения содержит пару рамок зажима и натяжения, связанных вместе, и путь трубопровода вдоль стингера, проходящий через рамку зажима и натяжения.
17. Судно по любому из пп. 14-16, в котором стингер является съемным в море посредством отсоединения от судна в точке поворота стингера и отсоединения от тяги в точке зацепления тяги, при этом стингер может быть поднят посредством крана для положения хранения.
18. Способ развертывания стингера на судне для укладки трубопровода, имеющем кран с полым основанием, при этом способ включает в себя этапы, на которых:
- обеспечивают систему для манипулирования стингером, расположенную, по меньшей мере, частично внутри полого основания и имеющую жесткую тягу, продолжающуюся из основания и выше борта судна;
- поворотно соединяют стингер с бортом судна для поворота вокруг точки поворота стингера;
- соединяют тягу к точке зацепления тяги на стингере на некотором расстоянии от точки поворота стингера; и
- эксплуатируют систему для манипулирования стингером для подъема или опускания стингера.
19. Способ по п. 18, в котором судно является судном по любому из пп. 1-17.
| WO 2005123566 A2, 29.12.2005 | |||
| WO 2008149210 A2, 11.12.2008 | |||
| WO 2009087559 A1, 16.07.2009 | |||
| НАПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ПОДДЕРЖИВАНИЯ ПОДВОДНОГО ТРУБОПРОВОДА, УКЛАДОЧНАЯ РАМПА, СОДЕРЖАЩАЯ ТАКОЕ НАПРАВЛЯЮЩЕЕ УСТРОЙСТВО, УКЛАДОЧНОЕ СУДНО, СНАБЖЕННОЕ ТАКОЙ УКЛАДОЧНОЙ РАМПОЙ, И СПОСОБ УПРАВЛЕНИЯ РАМПОЙ ДЛЯ УКЛАДКИ ПОДВОДНОГО ТРУБОПРОВОДА | 2009 |
|
RU2496044C2 |

