Изобретение относится к области радиолокации и может быть использовано в импульсно-доплеровской бортовой радиолокационной станции (БРЛС) для обеспечения энергетической скрытности ее работы на излучение при обнаружении воздушной цели-носителя станции радиотехнической разведки (РТР).
Известен способ функционирования когерентно-импульсного устройства БРЛС, заключающийся в формировании с помощью задающего генератора сигнала, преобразовании его в высокочастотный сигнал путем умножении его частоты, усилении по мощности и излучении в пространство, приеме отраженного от воздушной цели радиолокационного сигнала, его преобразовании на промежуточную частоту, усилении и фазовом детектировании для последующей обработки в приемном тракте БРЛС [1].
Недостатком данного способа функционирования когерентно-импульсного устройства БРЛС является невозможность с его помощью обеспечить скрытность работы БРЛС на излучение с заданной вероятностью при обнаружении воздушной цели, оснащенной станцией РТР.
Известен способ функционирования импульсно-доплеровской БРЛС, заключающийся в формировании высокочастотной последовательности зондирующих импульсов, их усилении по мощности, излучении в пространство, приеме, усилении, преобразовании отраженных сигналов на промежуточные частоты, их селекции по дальности и доплеровской частоте, преобразовании сигналов в цифровую форму с последующем их спектральном анализе [2].
Недостатком данного способа является отсутствие возможности с его помощью обеспечить скрытность работы БРЛС на излучение с заданной вероятностью при обнаружении воздушной цели - носителя станции РТР. Это обусловлено тем, что с одной стороны дальность Dбрлс обнаружения цели - носителя станции РТР с помощью импульсно-доплеровской БРЛС определяется выражением [2]

где
Рбрлс - средняя излучаемая мощность передатчика БРЛС;
Ткн - время когерентного накопления сигнала в приемнике, равное времени облучения воздушной цели - носителя станции РТР;
Gбрлс - коэффициент направленного действия передающей антенны БРЛС;
Sa - эффективная площадь приемной антенны БРЛС;
σртр - эффективная площадь отражения воздушной цели - носителя станции РТР;
αп - коэффициент потерь энергии сигнала при его обработке в приемнике БРЛС;
N0 - спектральная плотность внутренних шумов приемника БРЛС;
R0 - отношение энергии сигнала к спектральной плотности шума, при котором обеспечивается обнаружение воздушной цели - носителя станции РТР с заданными вероятностными характеристиками.
С другой стороны, максимальная дальность обнаружения Dртр станцией РТР излученного БРЛС высокочастотного зондирующего сигнала определяется выражением [3]

где
Gртр - коэффициент направленного действия приемной антенны станции РТР;
λбрлс - длина волны БРЛС;
Рртр - чувствительность приемника станции РТР.
При этом, возможны две ситуации. Первая ситуация, когда дальность обнаружения излученного БРЛС сигнала станцией РТР превышает дальность обнаружения БРЛС носителя станции РТР, т.е. DРТР>DБРЛС, приводящая к тому, что на дальности Dц воздушной цели-носителя станции РТР относительно истребителя с его БРЛС на входе приемника станции РТР создается отношение сигнал/шум, обеспечивающее обнаружение станцией РТР излучения БРЛС с заданными вероятностными характеристиками. Вторая ситуация, когда дальность обнаружения БРЛС воздушной цели - носителя станции РТР превышает дальность обнаружения станцией РТР излученного БРЛС зондирующего сигнала, т.е. DБРЛС>DРТР, приводящая к тому, что на дальности Dц воздушной цели-носителя станции РТР относительно истребителя с его БРЛС на входе приемника станции РТР создается отношение сигнал/шум, не обеспечивающее обнаружение излучения БРЛС с заданными вероятностными характеристиками. В первом случае скрытность работы БРЛС на излучение не обеспечивается, а во втором обеспечивается с заданной вероятностью.
Поэтому, для обеспечения скрытности работы БРЛС на излучение с заданной вероятностью при обнаружении воздушной цели - носителя станции РТР, необходимо постоянно контролировать и поддерживать требуемое отношение сигнал/шум на входе приемника станции РТР путем управления параметрами работы БРЛС истребителя.
Цель изобретения - сформировать управление излучением зондирующего сигнала и приемом отраженного от воздушной цели-носителя станции РТР сигнала в импульсно-доплеровской БРЛС истребителя, которое позволит обеспечить энергетическую скрытность работы БРЛС истребителя на излучение с заданной вероятностью при обнаружении воздушной цели-носителя станции РТР.
Указанная цель достигается тем, что в способе функционирования импульсно-доплеровской БРЛС при обеспечении энергетической скрытности ее работы на излучение, заключающимся в формировании высокочастотной последовательности зондирующих импульсов, их усилении по мощности, излучении в направлении воздушной цели - носителя станции РТР, приеме, усилении, преобразовании отраженных сигналов на промежуточные частоты, их селекции по дальности и доплеровской частоте, преобразовании сигналов в цифровую форму с последующим их спектральным анализом, дополнительно при обнаружении воздушной цели-носителя станции РТР, в импульсно-доплеровской БРЛС формируется параметр рассогласования Δi ( - количество управляющих сигналов) при управлении средней мощностью излучения Рбрлс передатчика и временами когерентного накопления сигнала Ткн в приемнике и облучения Тобл воздушной цели - носителя станции РТР в соответствии с выражением
- количество управляющих сигналов) при управлении средней мощностью излучения Рбрлс передатчика и временами когерентного накопления сигнала Ткн в приемнике и облучения Тобл воздушной цели - носителя станции РТР в соответствии с выражением

где
 - требуемые значения управляемых параметров,
- требуемые значения управляемых параметров,
 - требуемые значения средней излучаемой мощности передатчика БРЛС, времени облучения воздушной цели - носителя станции РТР и времени когерентного накопления сигнала в приемнике БРЛС соответственно;
- требуемые значения средней излучаемой мощности передатчика БРЛС, времени облучения воздушной цели - носителя станции РТР и времени когерентного накопления сигнала в приемнике БРЛС соответственно;
 - текущие значения управляемых параметров,
- текущие значения управляемых параметров,
Рбрлс, Тобл, Ткн - текущие значения средней излучаемой мощности передатчика БРЛС, времени облучения воздушной цели - носителя станции РТР и времени когерентного накопления сигнала в приемнике БРЛС истребителя соответственно;






Dц - измеренная дальность до воздушной цели-носителя станции РТР;
 - требуемое отношение сигнал/шум на входе приемника станции РТР для обеспечения заданных вероятностей правильного обнаружения излучения БРЛС станцией РТР при фиксированной вероятности ложной тревоги;
- требуемое отношение сигнал/шум на входе приемника станции РТР для обеспечения заданных вероятностей правильного обнаружения излучения БРЛС станцией РТР при фиксированной вероятности ложной тревоги;
 - спектральная плотность мощности внутренних шумов приемника станции РТР;
- спектральная плотность мощности внутренних шумов приемника станции РТР;
Тс - время обработки сигнала в станции РТР;
k - константа, характеризующая энергетический потенциал БРЛС;
k1=(0…1) - коэффициент проигрыша в энергии сигнала при его обработке в станции РТР, по отношению к энергии сигнала, при его когерентной обработке в БРЛС;
h - величина порога, определяющая значение вероятности ложной тревоги  при обнаружении излучения БРЛС;
при обнаружении излучения БРЛС;
 - вероятность правильного обнаружения станцией РТР излучения БРЛС;
- вероятность правильного обнаружения станцией РТР излучения БРЛС;
 - операция обратного преобразования Лапласа.
- операция обратного преобразования Лапласа.
Выражения (4)-(8) обусловлены следующими факторами.
Вероятностные характеристики обнаружения  и
и  излучения БРЛС станцией РТР зависят от отношения сигнал/шум на входе приемника станции РТР. С учетом этого, для обеспечения скрытности работы БРЛС истребителя с заданной вероятностью, величина которой (вероятности) равна вероятности необнаружения
излучения БРЛС станцией РТР зависят от отношения сигнал/шум на входе приемника станции РТР. С учетом этого, для обеспечения скрытности работы БРЛС истребителя с заданной вероятностью, величина которой (вероятности) равна вероятности необнаружения  излучения БРЛС станцией РТР необходимо, чтобы на входе приемника станции РТР отношение сигнал/шум соответствовало бы определенному, зависящему от величин
излучения БРЛС станцией РТР необходимо, чтобы на входе приемника станции РТР отношение сигнал/шум соответствовало бы определенному, зависящему от величин  и
и  значению
значению  (выражения (7), (8) [4]). С учетом
(выражения (7), (8) [4]). С учетом

где
 - минимальное значение мощности сигнала на входе приемника станции РТР для обеспечения заданных вероятностных характеристик и приняв в выражении (2)
- минимальное значение мощности сигнала на входе приемника станции РТР для обеспечения заданных вероятностных характеристик и приняв в выражении (2)  , а также учитывая тот факт, что станция РТР обнаруживает излучение БРЛС на дальности Dц (приравняв дальности Dртр=Dц) выражение (2) преобразуется к виду (4).
, а также учитывая тот факт, что станция РТР обнаруживает излучение БРЛС на дальности Dц (приравняв дальности Dртр=Dц) выражение (2) преобразуется к виду (4).
Выражения (5) и (6) обусловлены необходимостью обеспечения постоянства энергетического потенциала в виде произведения РбрлсТкн для сохранения характеристик обнаружения БРЛС, поскольку при обеспечении скрытности работы БРЛС на излучение уменьшается мощность ее передатчика Р6рлс с целью уменьшения отношения сигнал/шум на входе приемника станции РТР, что приводит к уменьшению дальности обнаружения станцией РТР излучения БРЛС (формула (2) и одновременно увеличивается время когерентного накопления Ткн, с целью сохранения дальности обнаружения БРЛС воздушной цели-носителя станции РТР на прежнем уровне (формула (1).
Выражение (9) обусловлено отсутствием на борту носителя станции РТР априорной информации о параметрах зондирующего сигнала БРЛС, что приводит к проигрышу в энергии сигнала при его обработке в станции РТР относительно когерентной обработки в БРЛС.
Таким образом, для обеспечения скрытности работы БРЛС истребителя на излучение с заданной вероятностью при фиксированной вероятности ложного обнаружения излучения БРЛС станцией РТР, во-первых, в соответствии с выражениями (7) и (8), определяется требуемое отношение сигнал/шум  на входе приемника станции РТР, во-вторых, в соответствии с формулами (4) и (5) с учетом формул (6) и (9) определяются требуемые значения
на входе приемника станции РТР, во-вторых, в соответствии с формулами (4) и (5) с учетом формул (6) и (9) определяются требуемые значения 
 и, в-третьих, в соответствии с выражением (3) вычисляется параметр рассогласования, который и определяет такое управление текущими значениями Р6рлс, Тобл, Ткн, при котором рассогласование сводится к нолю.
и, в-третьих, в соответствии с выражением (3) вычисляется параметр рассогласования, который и определяет такое управление текущими значениями Р6рлс, Тобл, Ткн, при котором рассогласование сводится к нолю.
Новыми признаками, обладающими существенными отличиями, является:
1. Формирование в соответствии с выражением (3) сигнала управления параметрами БРЛС при обеспечении энергетической скрытности ее работы на излучение при обнаружении воздушной цели-носителя станции РТР.
2. Формирование требуемых значений управляемых сигналов  в соответствии с формулами (4)-(9) и текущих значений управляемых сигналов
в соответствии с формулами (4)-(9) и текущих значений управляемых сигналов 
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение новых признаков, в совокупности с известными, позволит обеспечить энергетическую скрытность работы БРЛС на излучение с заданной вероятностью при обнаружении БРЛС воздушной цели-носителя станции РТР.
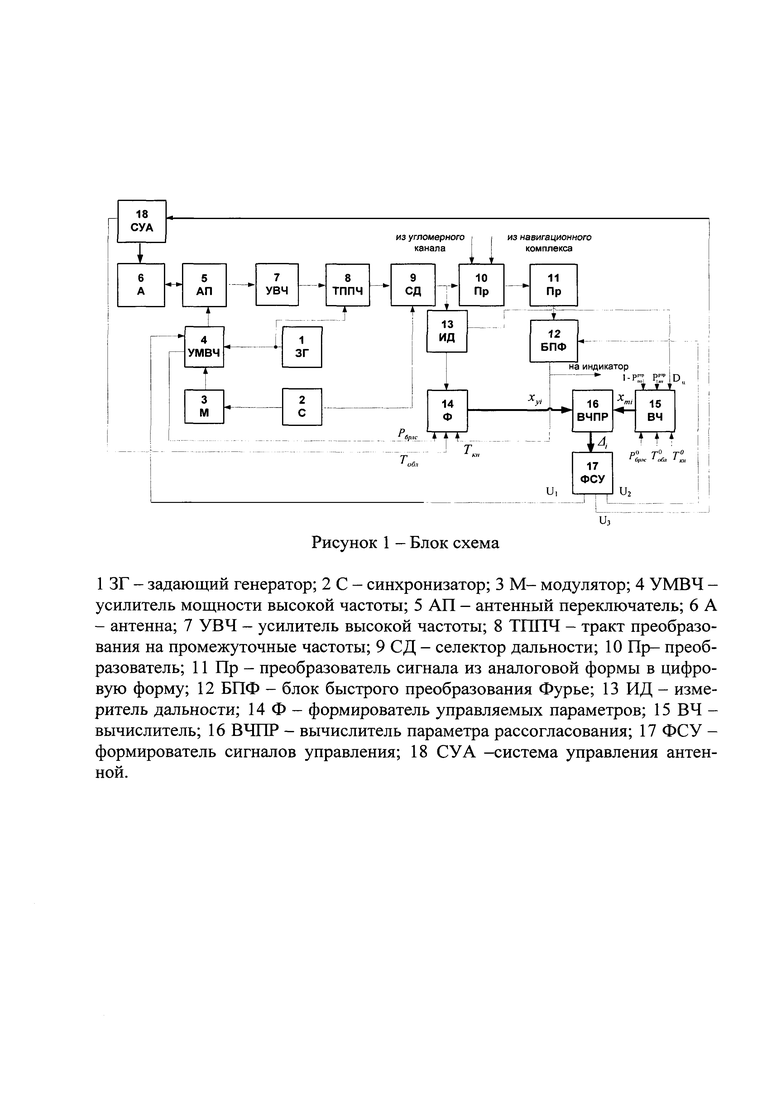
Способ функционирования импульсно-доплеровской БРЛС истребителя при обеспечении энергетической скрытности ее работы на излучение реализуется следующим образом (рисунок).
С помощью задающего генератора (ЗГ) 1, синхронизатора (С) 2 и модулятора (М) 3 формируются высокочастотные последовательности зондирующих импульсов, которые усиливаются в усилителе 4 мощности высокой частоты (УМВЧ) с управляемым коэффициентом усиления и через антенный переключатель (АП) 5, антенну (А) 6 излучаются в направлении воздушной цели - носителя станции РТР.
Отраженные от воздушной цели - носителя станции РТР сигналы принимаются антенной 6 и через антенный переключатель 5 поступают в приемник БРЛС, в котором усиливаются в усилителе 7 высокой частоты (УВЧ), преобразуются в тракте 8 преобразования на промежуточные частоты (ТППЧ), селектируются по дальности в селекторе 9 дальности (СД) с помощью селекторных импульсов, поступающих на его вход с выхода синхронизатора 2. В измерителе 13 (ИД) измеряется значение дальности, а в преобразователе 10 (Пр), на входы которого поступают значения углов ориентации диаграммы направленности антенны в вертикальной и горизонтальной плоскостях с выхода угломерного канала (на схеме не показан) и значение собственной скорости носителя БРЛС с выхода навигационного комплекса (на схеме не показан) осуществляется селекция сигналов по доплеровской частоте. В преобразователе 11 (Пр) сигнал из аналоговой формы преобразуется в цифровую форму, который поступает на вход блока 12 быстрого преобразования Фурье (БПФ), где осуществляется его спектральный анализ, и с его выхода - на индикатор.
Одновременно на входы вычислителя 15 (ВЧ) поступают: начальные значения параметров 
 и
и  соответствующих режиму функционированию БРЛС при обнаружении ВЦ-носителя станции РТР; измеренное значение дальности до обнаруживаемой воздушной цели-носителя станции РТР с выхода измерителя 13 дальности (ИД); заданные вероятность обеспечения скрытности работы БРЛС на излучение
соответствующих режиму функционированию БРЛС при обнаружении ВЦ-носителя станции РТР; измеренное значение дальности до обнаруживаемой воздушной цели-носителя станции РТР с выхода измерителя 13 дальности (ИД); заданные вероятность обеспечения скрытности работы БРЛС на излучение  и вероятность
и вероятность  ложного обнаружения излучения БРЛС станцией РТР. В вычислителе 15 в соответствии с выражениями (4)-(9) рассчитываются требуемые значения управляемых параметров
ложного обнаружения излучения БРЛС станцией РТР. В вычислителе 15 в соответствии с выражениями (4)-(9) рассчитываются требуемые значения управляемых параметров  которые поступают на вход вычислителя 16 параметра рассогласования (ВЧПР), на второй вход которого поступают текущие значения управляемых параметров
которые поступают на вход вычислителя 16 параметра рассогласования (ВЧПР), на второй вход которого поступают текущие значения управляемых параметров  . Значения управляемых параметров xyi формируются в формирователе (Ф) 14 управляемых параметров на основе текущих значений управляемых параметров Рбрлс, Тобл и Ткн функционирования БРЛС, поступающих на его входы соответственно с выхода усилителя мощности высокой частоты 4, системы управления антенны 18 (СУА) и блока БПФ 12, в котором время когерентного накопления Ткн обратно пропорционально эквивалентной полосе пропускания одного бина алгоритма БПФ. Причем, значения управляемых параметров xyi формируются на выходе формирователя 14 управляемых сигналов только при наличии на его входе сигнала, поступающего с измерителя дальности 13, что свидетельствует об обнаружении воздушной цели - носителя станции РТР, а следовательно - и о необходимости обеспечения энергетической скрытности работы БРЛС истребителя на излучение.
. Значения управляемых параметров xyi формируются в формирователе (Ф) 14 управляемых параметров на основе текущих значений управляемых параметров Рбрлс, Тобл и Ткн функционирования БРЛС, поступающих на его входы соответственно с выхода усилителя мощности высокой частоты 4, системы управления антенны 18 (СУА) и блока БПФ 12, в котором время когерентного накопления Ткн обратно пропорционально эквивалентной полосе пропускания одного бина алгоритма БПФ. Причем, значения управляемых параметров xyi формируются на выходе формирователя 14 управляемых сигналов только при наличии на его входе сигнала, поступающего с измерителя дальности 13, что свидетельствует об обнаружении воздушной цели - носителя станции РТР, а следовательно - и о необходимости обеспечения энергетической скрытности работы БРЛС истребителя на излучение.
С выхода вычислителя 16 параметра рассогласования значение Δi поступает на вход формирователя 17 (ФСУ) сигналов управления, на выходе которого формируются сигналы управления U1, U2, U3, пропорциональные параметру рассогласования Δi и поступают соответственно на входы усилителя 4 мощности высокой частоты, блока 12 БПФ и системы 18 управления антенной. Так, с помощью сигнала управления U1 в усилителе 4 мощности высокой частоты осуществляется изменение его коэффициента усиления, то есть излучаемой мощности Рбрлс передатчика БРЛС истребителя, с помощью сигнала управления U2 в блоке 12 БПФ осуществляется изменение эквивалентной полосы пропускания одного бина алгоритма БПФ (времени Ткн когерентного накопления сигнала в приемнике БРЛС), а с помощью сигнала управления U3 в системе 18 управления антенной осуществляется изменение времени Тобл облучения воздушной цели - носителя станции РТР. Управление значениями Р6рлс, Тобл и Ткн будет осуществляться до тех пор, пока параметр рассогласования Δi  не будет равен нолю, что и будет свидетельствовать об обеспечении энергетической скрытности работы БРЛС истребителя на излучение с заданной вероятностью.
не будет равен нолю, что и будет свидетельствовать об обеспечении энергетической скрытности работы БРЛС истребителя на излучение с заданной вероятностью.
Таким образом, предлагаемый способ позволит обеспечить энергетическую скрытность работы БРЛС на излучение с заданной вероятностью при обнаружении БРЛС воздушной цели-носителя станции РТР.
Источники информации
1. Авиационные радиолокационные комплексы и системы: учебник для слушателей и курсантов ВУЗов ВВС / П.И. Дудник, Г.С. Кондратенков, Б.Г. Татарский, А.Р. Ильчук, А.А. Герасимов. Под ред. П.И. Дудника. - М.: изд. ВВИА им. проф. Н.Е. Жуковского, 2006, страницы 527-528, рисунок 11.4 (аналог).
2. Авиационные радиолокационные комплексы и системы: учебник для слушателей и курсантов ВУЗов ВВС / П.И. Дудник, Г.С. Кондратенков, Б.Г. Татарский, А.Р. Ильчук, А.А. Герасимов. Под ред. П.И. Дудника. - М.: изд. ВВИА им. проф. Н.Е. Жуковского, 2006, страницы 630 (формула (12.89), 639-641, рисунок 12.39 (прототип).
3. Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. - М.: «Сов. Радио», 1975, страница 96, формула (4.8).
4. Тихонов В.И. Оптимальный прием сигналов. - М.: Радио и связь, 1983. - 320 с формулы (2.2.6, 2.2.7)
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ функционирования системы импульсно-доплеровских бортовых радиолокационных станций при групповых действиях истребителей | 2019 |
|
RU2728280C1 |
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции при обнаружении воздушной цели - носителя станций радиотехнической разведки и активных помех | 2018 |
|
RU2679597C1 |
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции при обнаружении воздушной цели - носителя станции радиотехнической разведки | 2015 |
|
RU2608551C1 |
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при воздействии по основному лепестку диаграммы направленности антенны помехи типа DRFM | 2019 |
|
RU2724116C1 |
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции с распознаванием постановщиков помех типа DRFM при обнаружении группы самолётов | 2019 |
|
RU2718698C1 |
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции с распознаванием воздействия помехи из вынесенной точки пространства при обнаружении воздушной цели, прикрываемой постановщиком помех | 2018 |
|
RU2688188C1 |
| Способ совместного функционирования бортовых радиолокационных станций и станций активных помех при распределении задач поражения и прикрытия между истребителями пары | 2022 |
|
RU2789849C1 |
| Способ обеспечения помехозащищенности бортовой радиолокационной станции при постановке прицельных по частоте помех станцией активных помех | 2022 |
|
RU2780470C1 |
| Способ управления направлением излучения зондирующего сигнала при реализации полупассивного самонаведения управляемых ракет класса "воздух-воздух" с радиолокационной головкой самонаведения | 2021 |
|
RU2799492C2 |
| Способ совместного функционирования бортовых РЛС и станций активных помех при групповых действиях истребителей | 2020 |
|
RU2760329C1 |
Изобретение относится к области радиолокации и может быть использовано в импульсно-доплеровской бортовой радиолокационной станции (БРЛС) для обеспечения энергетической скрытности ее работы на излучение при обнаружении воздушной цели-носителя станции радиотехнической разведки (РТР). Достигаемый технический результат - формирование управления излучением зондирующего сигнала и приемом отраженного от воздушной цели-носителя станции РТР сигнала в импульсно-доплеровской БРЛС истребителя, позволяющее обеспечить энергетическую скрытность работы БРЛС истребителя на излучение с заданной вероятностью при обнаружении воздушной цели-носителя станции РТР. Сущность способа функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при обеспечении энергетической скрытности ее работы на излучение заключается в формировании высокочастотной последовательности зондирующих импульсов, их усилении по мощности, излучении в направлении воздушной цели - носителя станции радиотехнической разведки, приеме, усилении, преобразовании отраженных сигналов на промежуточные частоты, их селекции по дальности и доплеровской частоте, преобразовании сигналов в цифровую форму с последующим их спектральным анализом, при этом формируются сигналы управления, пропорциональные параметрам рассогласования Δi ( - количество управляющих сигналов) в БРЛС при управлении средней мощностью излучения Рбрлс передатчика и временами когерентного накопления сигнала Ткн в приемнике и облучения Тобл воздушной цели - носителя станции РТР, в соответствии с определенным выражением. 1 ил.
- количество управляющих сигналов) в БРЛС при управлении средней мощностью излучения Рбрлс передатчика и временами когерентного накопления сигнала Ткн в приемнике и облучения Тобл воздушной цели - носителя станции РТР, в соответствии с определенным выражением. 1 ил.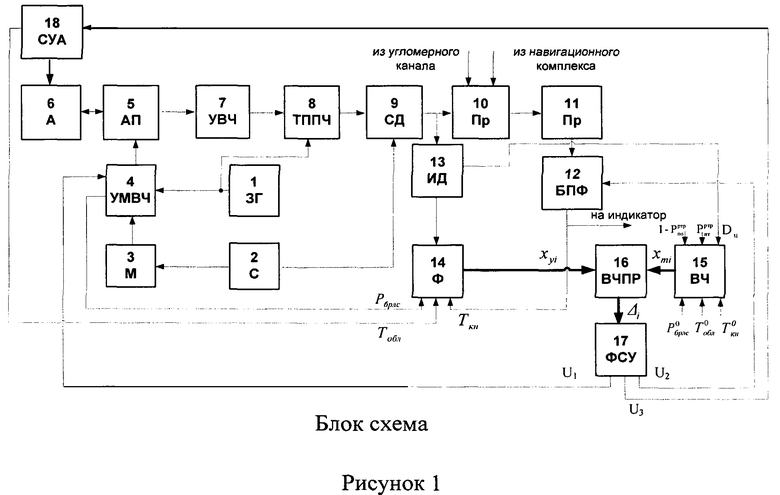
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при обеспечении энергетической скрытности ее работы на излучение, заключающийся в формировании высокочастотной последовательности зондирующих импульсов, их усилении по мощности, излучении в направлении воздушной цели - носителя станции радиотехнической разведки, приеме, усилении, преобразовании отраженных сигналов на промежуточные частоты, их селекции по дальности и доплеровской частоте, преобразовании сигналов в цифровую форму с последующим их спектральным анализом, отличающийся тем, что при обнаружении воздушной цели-носителя станции радиотехнической разведки в импульсно-доплеровской бортовой радиолокационной станции формируется параметр рассогласования Δi, где  - количество управляющих сигналов, при управлении средней мощностью излучения Рбрлс передатчика и временами когерентного накопления сигнала Ткн в приемнике и облучения Тобл воздушной цели - носителя станции радиотехнической разведки в соответствии с выражением
- количество управляющих сигналов, при управлении средней мощностью излучения Рбрлс передатчика и временами когерентного накопления сигнала Ткн в приемнике и облучения Тобл воздушной цели - носителя станции радиотехнической разведки в соответствии с выражением

где
 - требуемые значения управляемых параметров,
- требуемые значения управляемых параметров,
 - требуемые значения средней излучаемой мощности
- требуемые значения средней излучаемой мощности
передатчика бортовой радиолокационной станции, времени облучения воздушной цели - носителя станции радиотехнической разведки и времени когерентного накопления сигнала в приемнике бортовой радиолокационной станции соответственно;
 - текущие значения управляемых параметров,
- текущие значения управляемых параметров,
Рбрлс, Тобл и Ткн - текущие значения средней излучаемой мощности передатчика бортовой радиолокационной станции, времени облучения воздушной цели - носителя станции радиотехнической разведки и времени когерентного накопления сигнала в приемнике бортовой радиолокационной станции истребителя соответственно






Dц - измеренная дальность до воздушной цели-носителя станции радиотехнической разведки;
 - требуемое отношение сигнал/шум на входе приемника станции радиотехнической разведки для обеспечения заданных вероятностей правильного обнаружения излучения бортовой радиолокационной станции станцией радиотехнической разведки при фиксированной вероятности ложной тревоги;
- требуемое отношение сигнал/шум на входе приемника станции радиотехнической разведки для обеспечения заданных вероятностей правильного обнаружения излучения бортовой радиолокационной станции станцией радиотехнической разведки при фиксированной вероятности ложной тревоги;
 - спектральная плотность мощности внутренних шумов приемника станции радиотехнической разведки;
- спектральная плотность мощности внутренних шумов приемника станции радиотехнической разведки;
Gбрлс - коэффициент направленного действия передающей антенны бортовой радиолокационной станции;
Gртр - коэффициент направленного действия приемной антенны станции радиотехнической разведки;
λбрлс - длина волны бортовой радиолокационной станции;
Тс - время обработки сигнала в станции РТР;
k - константа, характеризующая энергетический потенциал бортовой радиолокационной станции;
k1=(0…1) - коэффициент проигрыша в энергии сигнала при его обработке в станции радиотехнической разведки, по отношению к энергии сигнала, при его когерентной обработке в бортовой радиолокационной станции;
h - величина порога, определяющая значение вероятности ложной тревоги  , при обнаружении излучения бортовой радиолокационной станции;
, при обнаружении излучения бортовой радиолокационной станции;
 - вероятность правильного обнаружения станцией радиотехнической разведки излучения бортовой радиолокационной станции;
- вероятность правильного обнаружения станцией радиотехнической разведки излучения бортовой радиолокационной станции;
 - операция обратного преобразования Лапласа.
- операция обратного преобразования Лапласа.
| Авиационные радиолокационные комплексы и системы | |||
| Под ред | |||
| П.И.ДУДНИКА | |||
| М., 2006, изд | |||
| ВВИА им | |||
| проф | |||
| Н.Е.Жуковского, с.639-641, рис.12.39 | |||
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции при обнаружении воздушной цели - носителя станции радиотехнической разведки | 2015 |
|
RU2608551C1 |
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции при обнаружении воздушной цели - носителя станций радиотехнической разведки и активных помех | 2018 |
|
RU2679597C1 |
| СПОСОБ ЗАЩИТЫ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ УВОДЯЩИХ ПО ДАЛЬНОСТИ ПОМЕХ С ИСПОЛЬЗОВАНИЕМ СТАНЦИИ АКТИВНЫХ ПОМЕХ | 2007 |
|
RU2335783C1 |
| US 8054212 B1, 08.11.2011 | |||
| Излучатель колебаний | 1981 |
|
SU977051A2 |
| JP 2001221844 A, 17.08.2001. | |||

