Изобретение относится к области радиолокации и может быть использовано для обеспечения скрытности работы импульсно-доплеровской бортовой радиолокационной станции (БРЛС) на излучение при обнаружении воздушной цели - носителя станции радиотехнической разведки (РТР).
Известен способ функционирования когерентно-импульсного устройства БРЛС, заключающийся в формировании с помощью задающего генератора сигнала, преобразовании его в высокочастотный сигнал путем умножения его частоты, усилении по мощности и излучении в пространство, приеме отраженного от воздушной цели радиолокационного сигнала, его преобразовании на промежуточную частоту, усилении и фазовом детектировании для последующей обработки в приемном тракте БРЛС [1].
Недостатком данного способа функционирования когерентно-импульсного устройства БРЛС является невозможность с его помощью обеспечить скрытность работы БРЛС при обнаружении воздушной цели, оснащенной станцией РТР.
Известен способ функционирования импульсно-доплеровской БРЛС, заключающийся в формировании высокочастотной последовательности зондирующих импульсов, их усилении по мощности, излучении в пространство, приеме, усилении, преобразовании отраженных сигналов на промежуточные частоты, их селекции по дальности и доплеровской частоте, преобразовании сигналов в цифровую форму с последующем их спектральным анализом [2].
Недостатком данного способа является невозможность с его помощью обеспечить скрытность работы БРЛС на излучение при обнаружении воздушной цели, каковой может являться носитель станции РТР. Это обусловлено тем, что, с одной стороны, дальность DБРЛС обнаружения цели - носителя станции РТР с помощью импульсно-доплеровской БРЛС определяется выражением [1]

где
Рбрлс - средняя излучаемая мощность передатчика;
Ткн - время когерентного накопления сигнала в приемнике, равное времени облучения воздушной цели - носителя станции РТР;
Gбрлс - коэффициент направленного действия передающей антенны;
Sa - эффективная площадь приемной антенны;
σртр - эффективная поверхность отражения воздушной цели - носителя станции РТР;
αп - коэффициент потерь энергии сигнала при его обработке;
N0 - спектральная плотность внутренних шумов приемника;
R0 - отношение энергии сигнала к спектральной плотности шума, при котором обеспечивается обнаружение воздушной цели - носителя станции РТР с заданной вероятностью.
С другой стороны, максимальная дальность обнаружения DPTP станцией РТР излученного БРЛС высокочастотного зондирующего сигнала определяется выражением [2]

где
Gртр - коэффициент направленного действия приемной антенны станции РТР;
λбрлс - длина волны БРЛС;
Рртр - максимальное значение чувствительности приемника станции РТР.
При этом возможны две ситуации. Первая ситуация, когда дальность обнаружения излученного БРЛС сигнала станцией РТР превышает или равна дальности обнаружения БРЛС носителя станции РТР, т.е. DPTP≥DБРЛС. Вторая ситуация, когда дальность обнаружения БРЛС воздушной цели - носителя станции РТР превышает дальность обнаружения станцией РТР излученного БРЛС зондирующего сигнала, т.е. DБРЛС>DPTP. Следовательно, в первом случае скрытность работы БРЛС на излучение не обеспечивается, а во втором - обеспечивается.
Поэтому для обеспечения постоянства скрытности работы БРЛС на излучение при обнаружении воздушной цели - носителя станции РТР необходимо постоянно контролировать и поддерживать условие

Цель изобретения - обеспечение скрытности функционирования импульсно-доплеровской бортовой радиолокационной станции на излучение при обнаружении воздушной цели - носителя станции радиотехнической разведки.
Указанная цель достигается тем, что в способе функционирования импульсно-доплеровской БРЛС при обнаружении воздушной цели - носителя станции РТР, заключающемся в формировании высокочастотной последовательности зондирующих импульсов, их усилении по мощности, излучении в направлении воздушной цели - носителя станции РТР, приеме, усилении, преобразовании отраженных сигналов на промежуточные частоты, их селекции по дальности и доплеровской частоте, преобразовании сигналов в цифровую форму с последующем их спектральным анализом, при этом дальность DБРЛС обнаружения воздушной цели - носителя станции РТР определяется выражением (1), дополнительно при каждом приеме отраженного от носителя станции РТР сигнала измеренное значение дальности обнаружения DБРЛС сравнивают с максимальным значением дальности обнаружения DPTP станцией РТР излученного БРЛС высокочастотного зондирующего сигнала, определяемой выражением (2), при выполнении условия (3) принимают решение о том, что скрытность БРЛС при ее работе на излучение обеспечена и станция РТР не обнаруживает излученный БРЛС сигнал, при этом средняя излучаемая мощность передатчика, время облучения воздушной цели - носителя станции РТР и время когерентного накопления сигнала в приемнике БРЛС остаются неизменными, если условие (3) не выполняется, то одновременно увеличивают в n раз, где n - целое или дробное число, большее единицы, время облучения воздушной цели - носителя станции РТР и время когерентного накопления сигнала в приемнике БРЛС и уменьшают в n раз среднюю излучаемую мощность передатчика БРЛС до тех пор, пока не будет выполнено условие (3), которое свидетельствует об обеспечении скрытности работы БРЛС на излучение.
Новыми признаками, обладающими существенными отличиями, являются:
1. Принятие решения об обеспечении скрытности работы импульсно-доплеровской БРЛС на излучение при обнаружении воздушной цели - носителя станции РТР на основе анализа результата сравнения измеренного значения дальности обнаружения DБРЛС воздушной цели - носителя станции РТР с максимальным значением дальности обнаружения DPTP станцией РТР излученного БРЛС высокочастотного зондирующего сигнала.
2. Одновременное увеличение в n раз, где n - целое или дробное число, большее единицы, времени облучения носителя станции РТР и времени когерентного накопления сигнала в приемнике БРЛС и уменьшении в n раз средней излучаемой мощности передатчика БРЛС для обеспечения выполнения условия (3), которое свидетельствует о скрытности работы БРЛС на излучение.
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение новых признаков позволит осуществлять контроль и обеспечить скрытность работы БРЛС на излучение при обнаружении воздушной цели - носителя станции РТР.
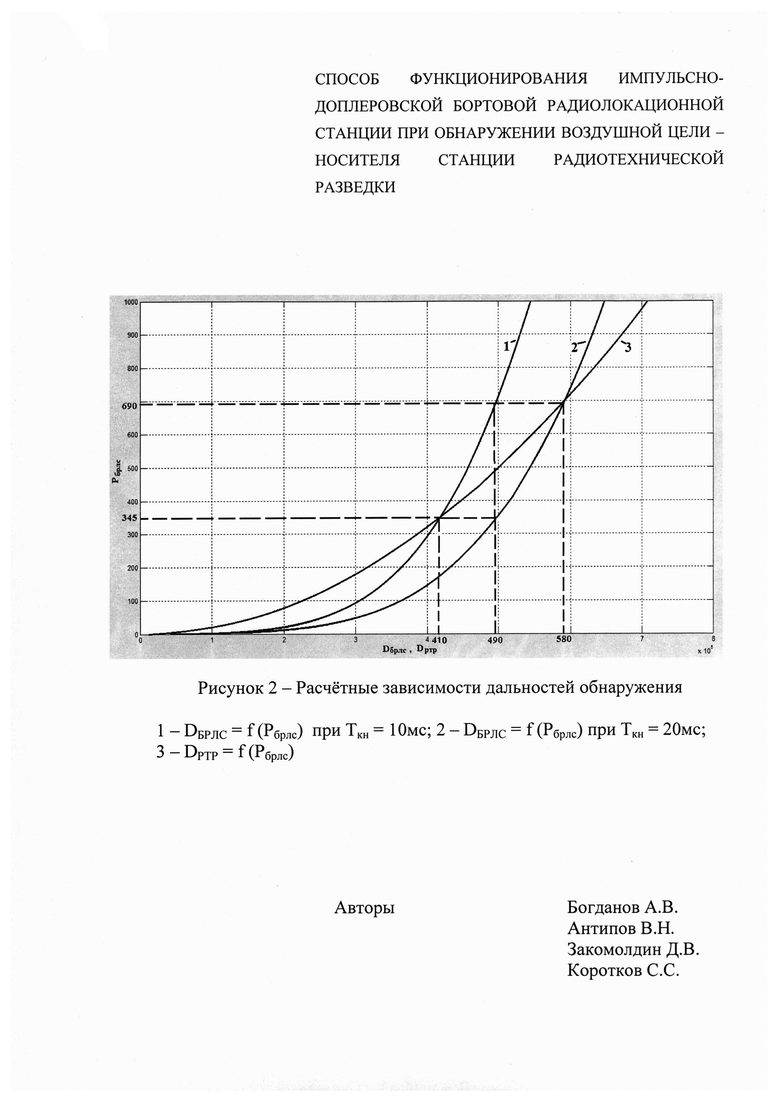
На рисунках 1 и 2 представлены соответственно блок-схема и графики, поясняющие предлагаемый способ функционирования импульсно-доплеровской БРЛС при обнаружении воздушной цели - носителя станции РТР.
Способ функционирования импульсно-доплеровской БРЛС при обнаружении воздушной цели - носителя станции РТР реализуется следующим образом (рисунок 1).
С помощью задающего генератора 1, синхронизатора 2 и модулятора 3 формируются высокочастотные последовательности зондирующих импульсов, которые усиливаются в усилителе 4 мощности высокой частоты с управляемым коэффициентом усиления и через антенный переключатель 5, антенну 6 излучаются в направлении воздушной цели - носителя станции РТР. Отраженные от воздушной цели - носителя станции РТР сигналы принимаются антенной 6 и через антенный переключатель 5 поступают в приемник БРЛС, в котором усиливаются в усилителе 7 высокой частоты, преобразуются в тракте 8 преобразования на промежуточные частоты, селектируются по дальности в селекторе 9 дальности с помощью селекторных импульсов, поступающих на его вход с выхода синхронизатора 2, а также селектируются по доплеровской частоте в преобразователе 10, на входы которого поступают значения углов ориентации диаграммы направленности антенны в вертикальной и горизонтальной плоскостях с выхода угломерного канала (на схеме не показан) и значение собственной скорости носителя БРЛС с выхода навигационного комплекса (на схеме не показан). В преобразователе 11 сигнал из аналоговой формы преобразуется в цифровую форму, который поступает на вход блока 12 быстрого преобразования Фурье (БПФ), где осуществляется его спектральный анализ, и с его выхода - на индикатор.
Одновременно в измерителе 13 дальности осуществляется измерение дальности DБРЛС обнаружения БРЛС воздушной цели - носителя станции РТР, которая сравнивается в анализаторе 15 с предварительно рассчитанной в вычислителе 14 в соответствии с формулой (2) максимальной дальностью DPTP обнаружения станцией РТР излученного БРЛС зондирующего сигнала.
При выполнении условия (3) в анализаторе 15 принимается решение о том, что скрытность БРЛС при ее работе на излучение при обнаружении воздушной цели - носителя станции РТР обеспечена. При этом на первом, втором и третьем выходах анализатора 15 формируются сигналы, являющиеся запрещающими для изменения соответственно времени когерентного накопления сигнала (эквивалентной полосы пропускания одного бина алгоритма БПФ) в блоке 12 БПФ, времени облучения воздушной цели - носителя станции РТР, которое управляется с помощью системы 16 управления антенной, и излучаемой средней мощности передатчика, управление которой осуществляется в усилителе 4 мощности высокой частоты.
При невыполнении условия (3) в анализаторе 15 принимается решение о том, что скрытность БРЛС при ее работе на излучение при обнаружении воздушной цели - носителя станции РТР не обеспечена. При этом на первом, втором и третьем выходах анализатора 15 формируются сигналы, являющиеся разрешающими для увеличения в n раз, где n - целое или дробное число, большее единицы, соответственно времени когерентного накопления сигнала в блоке 12 БПФ путем увеличения количества отсчетов процедуры БПФ при постоянной частоте дискретизации сигнала в блоке 11 и времени облучения воздушной цели - носителя станции РТР путем управления диаграммой направленности антенны БРЛС с помощью системы 16 управления антенной таким образом, чтобы время нахождения луча диаграммы направленности находилось бы на той угловой позиции, на которой обнаружена воздушная цель - носитель станции РТР, было бы равно времени когерентного накопления сигнала в блоке 12 БПФ, а также разрешающим сигналом для уменьшения в n раз излучаемой средней мощности передатчика БРЛС путем уменьшения коэффициента усиления в усилителе 4 мощности высокой частоты.
На рисунке 2 представлены результаты расчетов зависимостей дальностей DБРЛС обнаружения БРЛС воздушной цели - носителя станции РТР от средней излучаемой мощности Рбрлс передатчика при времени когерентного накопления 10 мс и 20 мс (соответственно зависимости 1 и 2) и дальности DPTP обнаружения станцией РТР излученного БРЛС сигнала, рассчитанные соответственно по формулам (1) и (2) при следующих типовых исходных данных.
Для расчета дальности DБРЛС обнаружения (формула (1)) БРЛС воздушной цели - носителя станции РТР: Gбрлс=6200; Sa=0,79 м2; σртр=9 м2; αп=1; Ν0=4 10-21 Вт/Гц; R0=13 дБ.
Для расчета дальности DPTP обнаружения (формула (2)) станцией РТР излученного БРЛС сигнала: Gртр=80; λбрлс=4 см; Рртр = -80 дБ.
Из приведенных графиков следует, что, например, при средней излученной мощности передатчика БРЛС Рбрлс=690 Вт и при первоначально принятом времени когерентного накопления Ткн=10 мс (зависимость 1) дальность обнаружения воздушной цели - носителя станции РТР составляет DБРЛС=490 км, в то время как при той же излученной средней мощности передатчика БРЛС Рбрлс=690 Вт дальность обнаружения станцией РТР излученного БРЛС сигнала (зависимость 3) составляет DPTP=580 км, т.е. условие (3) не выполняется, что свидетельствует о том, что скрытность работы БРЛС на излучение при обнаружении воздушной цели - носителя станции РТР не обеспечена.
Если теперь одновременно увеличить в 2 раза время когерентного накопления сигнала до 20 мс (зависимость 2), равное времени облучения воздушной цели - носителя станции РТР, и уменьшить в 2 раза среднюю излучаемую мощность передатчика БРЛС до Рбрлс=345 Вт, то дальность обнаружения воздушной цели - носителя станции РТР так и будет составлять DБРЛС = 490 км, а дальность обнаружения станцией РТР излученного БРЛС сигнала (зависимость 3) будет уже составлять DPTP=410 км, т.е. в данном случае условие (3) выполняется, что свидетельствует о том, что путем одновременного увеличения времени когерентного накопления сигнала и времени облучения воздушной цели - носителя станции РТР и уменьшении средней излучаемой мощности передатчика БРЛС обеспечивается скрытность работы БРЛС на излучение при обнаружении цели - носителя станции РТР.
Таким образом, применение предлагаемого изобретения позволит обеспечить скрытность функционирования импульсно-доплеровской БРЛС на излучение при обнаружении воздушной цели - носителя станции РТР.
Источники информации
1. Авиационные радиолокационные комплексы и системы: Учебник для слушателей и курсантов ВУЗов ВВС. / П.И. Дудник, Г.С. Кондратенков, Б.Г. Татарский, А.Р. Ильчук, А.А. Герасимов. Под ред. П.И. Дудника. - М: изд. ВВИА им. проф. Н.Е. Жуковского, 2006, с. 527-528, рис. 11.4 (аналог).
2. Авиационные радиолокационные комплексы и системы: Учебник для слушателей и курсантов ВУЗов ВВС. / П.И. Дудник, Г.С. Кондратенков, Б.Г. Татарский, А.Р. Ильчук, А.А. Герасимов. Под ред. П.И. Дудника. - М.: изд. ВВИА им. проф. Н.Е. Жуковского, 2006, с. 630 (формула (12.89)), с. 639-641, рис. 12.39 (прототип).
3. Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. - М.: Сов. радио, 1975, с. 96, формула (4.8).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции при обнаружении воздушной цели - носителя станций радиотехнической разведки и активных помех | 2018 |
|
RU2679597C1 |
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при обеспечении энергетической скрытности её работы на излучение | 2019 |
|
RU2694891C1 |
| Способ функционирования системы импульсно-доплеровских бортовых радиолокационных станций при групповых действиях истребителей | 2019 |
|
RU2728280C1 |
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при воздействии по основному лепестку диаграммы направленности антенны помехи типа DRFM | 2019 |
|
RU2724116C1 |
| Способ обеспечения помехозащищенности бортовой радиолокационной станции при постановке прицельных по частоте помех станцией активных помех | 2022 |
|
RU2780470C1 |
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции с распознаванием воздействия помехи из вынесенной точки пространства при обнаружении воздушной цели, прикрываемой постановщиком помех | 2018 |
|
RU2688188C1 |
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции с распознаванием постановщиков помех типа DRFM при обнаружении группы самолётов | 2019 |
|
RU2718698C1 |
| Способ управления направлением излучения зондирующего сигнала при реализации полупассивного самонаведения управляемых ракет класса "воздух-воздух" с радиолокационной головкой самонаведения | 2021 |
|
RU2799492C2 |
| Бортовая радиолокационная станция | 2016 |
|
RU2609156C1 |
| Бортовая радиолокационная станция дистанционно управляемого летательного аппарата | 2017 |
|
RU2668995C1 |

Изобретение относится к области радиолокации и может быть использовано при обнаружении воздушной цели. Достигаемый технический результат - обеспечение скрытности работы импульсно-доплеровской бортовой радиолокационной станции (БРЛС) на излучение при обнаружении воздушной цели - носителя станции радиотехнической разведки (РТР). Способ заключается в формировании высокочастотной последовательности зондирующих импульсов, их усилении по мощности, излучении в направлении воздушной цели - носителя станции РТР, приеме, усилении, преобразовании отраженных сигналов на промежуточные частоты, их селекции по дальности и доплеровской частоте, преобразовании сигналов в цифровую форму с последующем их спектральным анализом, при каждом приеме отраженного от воздушной цели - носителя станции РТР сигнала измеренное значение дальности обнаружения DБРЛС сравнивают с максимальным значением дальности обнаружения DPTP станцией РТР излученного БРЛС сигнала, при выполнении условия DБРЛС>DPTP принимают решение о том, что скрытность БРЛС при ее работе на излучение обеспечена и станция РТР не обнаруживает излученный БРЛС сигнал, при этом средняя излучаемая мощность передатчика БРЛС, время облучения воздушной цели - носителя станции РТР и время когерентного накопления сигнала в приемнике БРЛС остаются неизменными, в противном случае одновременно увеличивают в n раз, где n - целое или дробное число, большее единицы, время облучения воздушной цели - носителя станции РТР и время когерентного накопления сигнала в приемнике БРЛС и уменьшают в n раз среднюю излучаемую мощность передатчика БРЛС до тех пор, пока не будет выполнено условие DБРЛС>DРТР, которое свидетельствует об обеспечении скрытности работы БРЛС на излучение. 2 ил.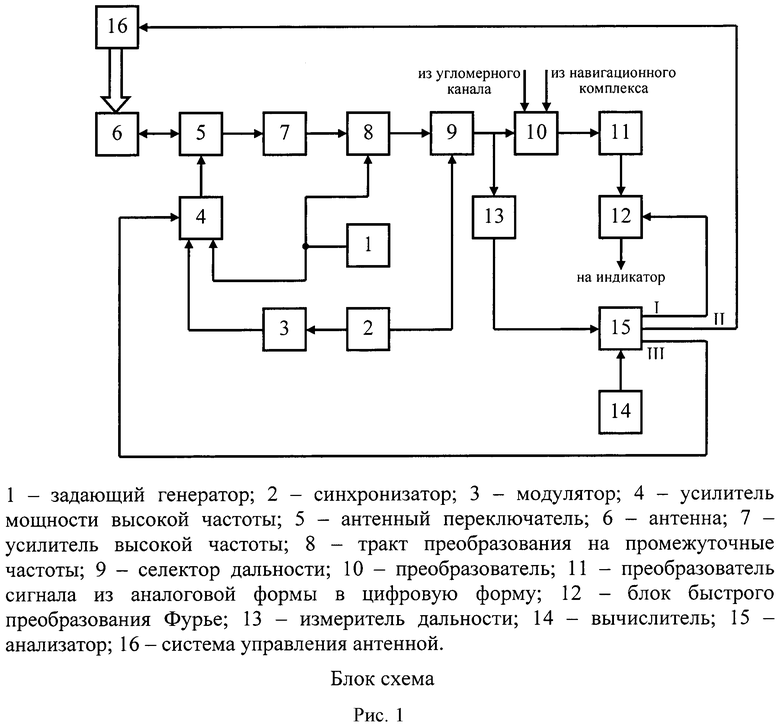
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции при обнаружении воздушной цели - носителя станции радиотехнической разведки, заключающийся в формировании высокочастотной последовательности зондирующих импульсов, их усилении по мощности, излучении в направлении воздушной цели - носителя станции радиотехнической разведки, приеме, усилении, преобразовании отраженных сигналов на промежуточные частоты, их селекции по дальности и доплеровской частоте, преобразовании сигналов в цифровую форму с последующем их спектральном анализом, при этом дальность DБРЛС обнаружения воздушной цели - носителя станции радиотехнической разведки определяется выражением

где Рбрлс - средняя излучаемая мощность передатчика; Ткн - время когерентного накопления сигнала в приемнике, равное времени облучения воздушной цели - носителя станции радиотехнической разведки; Gбрлс - коэффициент направленного действия передающей антенны; Sa - эффективная площадь приемной антенны; σртр - эффективная поверхность отражения воздушной цели - носителя станции радиотехнической разведки; αп - коэффициент потерь энергии сигнала при его обработке; N0 - спектральная плотность внутренних шумов приемника; R0 - отношение энергии сигнала к спектральной плотности шума, при котором обеспечивается обнаружение воздушной цели - носителя станции радиотехнической разведки с заданной вероятностью, отличающийся тем, что при каждом приеме отраженного от воздушной цели - носителя станции радиотехнической разведки сигнала измеренное значение дальности обнаружения DБРЛС сравнивают с максимальным значением дальности обнаружения DРТР станцией радиотехнической разведки излученного бортовой радиолокационной станцией высокочастотного зондирующего сигнала, определяемой выражением

где Gртр - коэффициент направленного действия приемной антенны станции радиотехнической разведки; λбрлс - длина волны бортовой радиолокационной станции; Рртр - максимальное значение чувствительности приемника станции радиотехнической разведки, при выполнении условия

принимают решение о том, что скрытность бортовой радиолокационной станции при ее работе на излучение обеспечена и станция радиотехнической разведки не обнаруживает излученный бортовой радиолокационной станцией сигнал, при этом средняя излучаемая мощность Рбрлс, время облучения воздушной цели - носителя станции радиотехнической разведки и время Ткн когерентного накопления сигнала в приемнике бортовой радиолокационной станции остаются неизменными, если условие (3) не выполняется, то одновременно увеличивают в n раз, где n - целое или дробное число, большее единицы, время облучения воздушной цели - носителя станции радиотехнической разведки и время Ткн когерентного накопления сигнала в приемнике бортовой радиолокационной станции и уменьшают в n раз среднюю излучаемую мощность Рбрлс передатчика бортовой радиолокационной станции до тех пор, пока не будет выполнено условие (3), которое свидетельствует об обеспечении скрытности работы бортовой радиолокационной станции на излучение.
| Авиационные радиолокационные комплексы и системы | |||
| Под ред ДУДНИКА П.И., Москва, изд | |||
| ВВИА им | |||
| проф | |||
| Жуковского Н.Е., 2006,с.630, 639-641 | |||
| СПОСОБ ФУНКЦИОНИРОВАНИЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ НА БАЗЕ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ С УПРАВЛЯЕМЫМИ ПАРАМЕТРАМИ ИЗЛУЧЕНИЯ | 2013 |
|
RU2543511C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2427002C1 |
| СПОСОБ СКРЫТНОГО САМОНАВЕДЕНИЯ САМОЛЕТОВ НА ВОЗДУШНЫЕ ОБЪЕКТЫ | 2009 |
|
RU2408845C1 |
| US 6137439 A, 24.10.2000 | |||
| WO 2001027654 A1, 19.04.2001 | |||
| WO 2008105892 A3, 05.02.2009. | |||

