Изобретение относится к области радионаведения самодвижущихся снарядов, в частности самонаведения управляемых ракет класса "воздух-воздух".
Кроме активного способа в настоящее время известны следующие способы самонаведения ракеты класса "воздух-воздух": полуактивный способ, основанный на использовании в головке самонаведения ракеты отраженных от цели сигналов, излучаемых бортовой радиолокационной станцией (РЛС) носителя ракеты. Данный способ требует установки на борту ракеты дополнительных устройств для приема изучаемых сигналов, которые используется для решения задачи селекции при приеме отраженных от цели сигналов. Это приводит к увеличению веса и габаритов бортового электронного оборудования. Данный способ обладает низкой скрытностью наведения вследствие того, что требуется непрерывно подсвечивать цель бортовой РЛС носителя [1]; способ пассивного самонаведения управляемой ракеты класса "воздух-воздух" с радиолокационной головкой самонаведения [2], при котором ракета наводится по сигналам, излучаемым целью. Недостатком пассивного способа самонаведения является необходимость наличия в приемнике головки самонаведения широкополосного приемного фильтра в связи с тем, что заранее неизвестна несущая частота и параметры излучаемого целью сигнала. Наличие широкополосного приемного фильтра предопределяет сложность приемного устройства [3]; способ полупассивного самонаведения [4], который по своей технической сущности наиболее близок к предлагаемому способу, заключается в том, что на носителе формируют зондирующий сигнал в направлении цели для провокации ее помеховых станций на излучения помехового сигнала, по которому производят наведение управляемой ракеты.
Недостатком способа прототипа является малая дальность обнаружения и сопровождения цели бортовой РЛС носителя, обусловленная необходимостью использования Х диапазона частот (длина волны 2-4 см) из-за ограничений по габаритам антенного блока головки самонаведения (ГСН) ракеты класса «воздух-воздух», а также малой эффективной площадью рассеяния целей в Х диапазоне длин волн, выполненных по технологии Стелс.
Технической задачей изобретения является повышение дальности применения ракеты класса «воздух-воздух», самонаводящейся полупассивным способом.
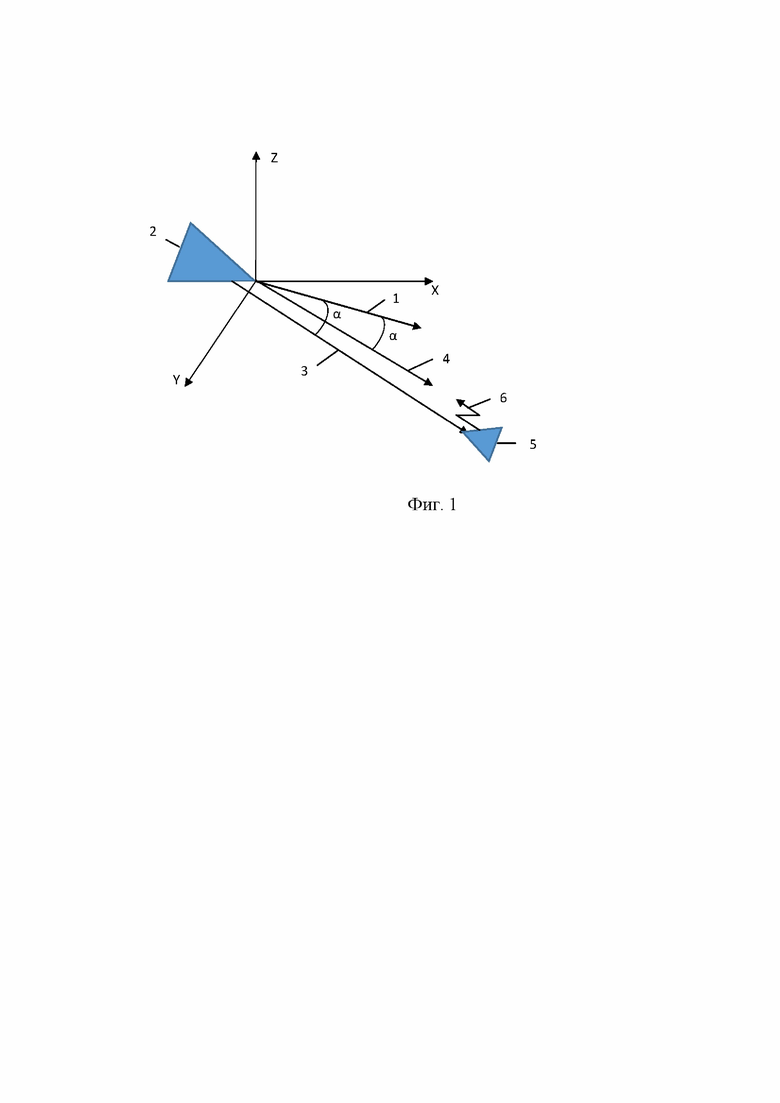
Решение поставленной задачи с достижением технического результата достигается тем, что в способе полупассивного самонаведения управляемых ракет класса "воздух - воздух" с радиолокационной головкой самонаведения, заключающемся в том, что на носителе формируют зондирующий сигнал в направлении цели для провокации ее помеховых станций на излучения помехового сигнала, по которому производят наведение управляемой ракеты, в случае отсутствия отраженного от цели сигнала или сигнала помехи, направление излучения РЛС Х диапазона выполняют соосно с направлением излучения вспомогательной РЛС, например L диапазона (длина волны 10 см), установленной на носителе и обладающей большей по сравнению с РЛС Х диапазона дальностью обнаружения и сопровождения воздушных целей, выполненных, в том числе по технологии Стелс. Схематично соосное направление излучений показано на фиг. 1 в виде угла α между продольной осью 1 носителя 2 и направлением 3 излучений вспомогательной РЛС, а также аналогичного угла α между продольной осью 1 носителя 2 и направлением 4 излучений зондирующего сигнала, провоцирующего излучение помех. Кроме того, на фиг.1 отображено положение цели 5 относительно носителя 2 и наличие помехового сигнала 6.
Сущность предлагаемого способа поясняется следующими рассуждениями. Воздушные объекты, имеющие важное значение, в том числе выполненные по технологии Стелс, оборудуются индивидуальным комплексом радиоэлектронной борьбы (РЭБ), состоящим из станций радиотехнической разведки (РТР) и станций маскирующих и имитирующих помех (СП). Комплекс РЭБ индивидуальной защиты воздушного объекта функционирует в автоматическом режиме в соответствии с законами и правилами радиоэлектронной борьбы и формирует помеховое противодействие облучающей РЛС управления оружием [5]. Дальность D информационного контакта между РЛС и целью, при котором обеспечивается обнаружение и сопровождение цели, определяется в соответствии с основным уравнением радиолокации [6]:

где tн - длительность когерентного накопления; kип, GпрмПЦ - соответственно коэффициент использования площади и коэффициент направленного действия приемной антенны станции подсвета цели (ПЦ) носителя; kш, NoПЦ - соответственно коэффициент и спектральная плотность внутренних шумов приемника; λ - длина волны излучаемого сигнала; αп - обобщенный коэффициент потерь; qтр - требуемое отношение сигнал/шум при обнаружении. К параметрам, существенно влияющим на D в контексте предлагаемого способа, относятся: Р, G - соответственно мощность передатчика и коэффициент направленного действия антенны станции ПЦ; λ - длина волны излучаемого сигнала; σ - эффективная площадь рассеяния цели в диапазоне длин волн зондирующего сигнала.
Дальность применения ракеты при реализации полупассивного самонаведения будет соответствовать меньшей из двух дальностей - либо максимальной дальности обнаружения станцией РТР излучаемого зондирующего сигнала Х диапазона, либо максимальной дальности обнаружения ГСН ракеты помехового сигнала, излучаемого станцией помех цели и идентифицированного пригодным для обработки. Для оценки дальности применения самонаводящейся полупассивным способом ракеты с учетом предлагаемого способа управления направлением излучения зондирующего сигнала Х диапазона (провоцирующего зондирующего сигнала - ПЗС) воспользуемся энергетическими соотношениями при подавлении радиолокационных станций, приведенные в [6]. Максимальная дальность обнаружения DоПЗС станцией РТР источника излучений Х диапазона - ПЗС (канал запроса) может быть определена по формуле

где РПЗСGПЗС - энергетический потенциал источника ПЗС; GРТР - коэффициент направленного действия антенны станции РТР; λПЗС - длина волны ПЗС; Рр - реальная чувствительность станции РТР.
Максимальная дальность обнаружения DоСП ГСН ракеты сигналоподобной помехи (канал ответа) может быть определена по формуле

где РП - средняя мощность излучения СП; Gп - коэффициент направленного действия антенны СП в направлении на ГСН; tн - время накопления сигналоподобной помехи; GППРГС - коэффициент направленного действия антенны ГСН в направлении СП; λСП - длина волны сигналоподобной помехи; α∑ - коэффициент технического совершенства ГСН, учитывающий внутренние шумы и потери мощности при обработке сигналов в различных элементах приемника; No, kш - соответственно спектральная плотность внутренних шумов и коэффициент шума приемника ГСН; qтр - коэффициент требуемого превышения мощности сигналоподобной помехи над мощностью внутреннего шума на выходе приемника ГСН.
При ограничении площади приемной антенны и полосы пропускания ГСН максимальную дальность обнаружения DоМП источника маскирующей помехи, которая представляет собой непрерывный шумовой сигнал и несущая частота λМП которого совпадает с частотой ПЗС, можно оценить по формуле

где РМП - средняя мощность излучения маскирующей помехи; GМП - коэффициент направленного действия антенны СП в сторону ГСН; Pmin - реальная чувствительность ГСН при действии маскирующей помехи.
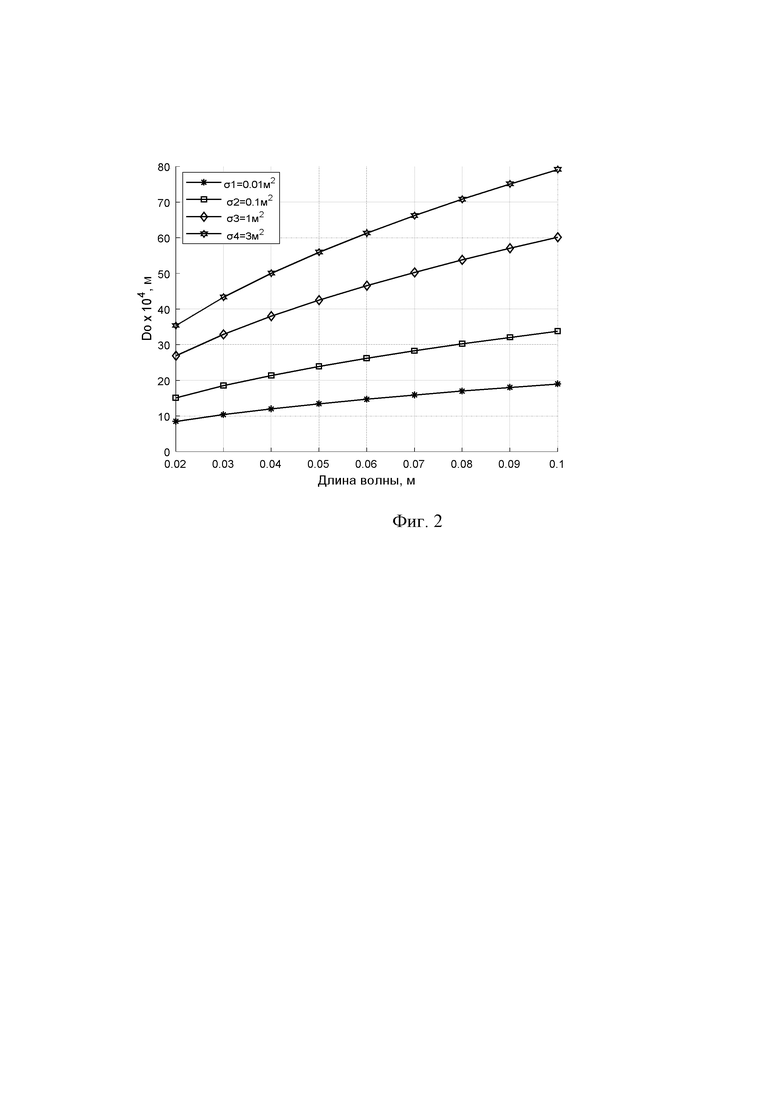
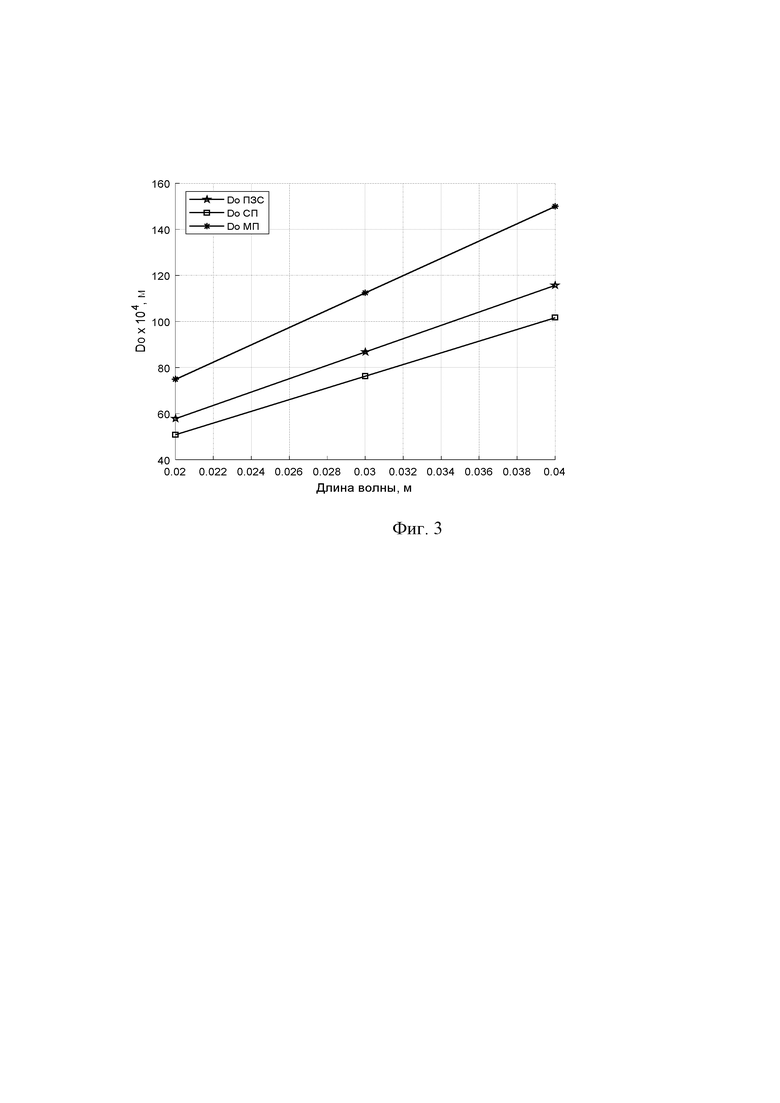
На фиг. 2 и фиг. 3 с учетом потерь в трактах обработки радиотехнических средств, потенциально способных принимать участие при реализации способа полупассивного самонаведения ракеты, а также потерь при распространении электромагнитных волн на большие расстояния, графически представлены дальность обнаружения целей с эффективной площадью рассеяния σ от 0.01м2 до 3м2 и дальности обнаружения: ПЗС (дальности разведки РЛС управления оружием бортовыми средствами РТР цели); сигналоподобной помехи в ГСН ракеты; маскирующей помехи в ГСН ракеты в зависимости от длины волны зондирующего сигнала. Графики на фиг. 2 получены на основании формулы (1), а на фиг. 3 - формул (2)-(4). Численные значения параметров в формулах (1)-(4) являются гипотетическими и не учитывают многих нюансов как возможных взаимных пространственных положений носителя, ракеты и цели, так и правил РЭБ, например, прием сигналов по главному, ближним и дальним боковым лепесткам диаграммы направленности антенны РЛС, влияющим на коэффициент направленного действия антенны, или степень превышения мощности сигналоподобной помехи на приемной стороне и др. Однако использование одинаковых числовых параметров, существенно влияющих на D, в формулах, где это обосновано сущностью предлагаемого способа, позволяет судить о возможной дальности информационного контакта с целью при использовании РЛС L диапазона (λ=10 см) и РЛС Х диапазона (λ=3 см). Также существенной особенностью по сути предлагаемого способа является отсутствие в формулах (2)-(4) зависимости D от эффективной площади рассеяния цели σ в диапазоне длин волн зондирующего сигнала Х диапазона.
Новыми признаками, обладающими существенными отличиями по способу, является следующая совокупность действий:
1. Посредством РЛС Х диапазона формируют зондирующий сигнал в направлении цели, регистрируют отраженный от цели сигнал или сигналы имитирующих и маскирующих помех.
2. При отсутствии отраженного от цели сигнала или сигналов имитирующих и маскирующих помех в Х диапазоне длин волн посредством РЛС L диапазона формируют зондирующий сигнал в направлении цели.
3. При осуществлении сопровождения цели посредством РЛС L диапазона управляют направлением излучения РЛС Х диапазона таким образом, чтобы излучения были соосными.
4. При отсутствии помеховых излучений в Х диапазоне управление по пункту 3 осуществляют с периодическим изменением параметров зондирующего сигнала Х диапазона.
Данные признаки являются существенными и в известных технических решениях не обнаружены.
Применение всех новых существенных признаков позволит повысить дальность применения ракеты класса «воздух-воздух», самонаводящейся полупассивным способом.
Способ управления направлением излучения зондирующего сигнала при реализации полупассивного самонаведения управляемых ракет класса "воздух - воздух" с радиолокационной головкой самонаведения осуществляется следующим образом. Действия по управлению направлением излучения зондирующего сигнала рассмотрим на примере бортовых радиолокационных станций (БРЛС) Х и L диапазонов, установленных на носителе, ракеты и цели, оборудованной комплексом средств РЭБ в составе станции РТР и станций постановки имитирующих и маскирующих помех. Пример выполнения БРЛС приведен в работе [7]. При обнаружении цели БРЛС L диапазона данная БРЛС осуществляет слежение с одновременным определением направления на цель. БРЛС Х диапазона осуществляет излучение зондирующего сигнала соосно с направлением излучения БРЛС L диапазона. В случае отсутствия отраженного от цели сигнала Х диапазона или сигналов помех в Х диапазоне в БРЛС Х диапазона осуществляется периодическое изменение параметров зондирующего сигнала. Сведения об изменении параметров зондирующего сигнала поступают в ГСН ракеты для настройки параметров фильтров, идентификации и оценки параметров входных сигналов. Алгоритм идентификации и оценки параметров входных сигналов приведен в [4]. При превышении мощности принимаемого сигнала ГСН ракеты, идентифицируемого пригодным для управления ракетой, осуществляют применение ракеты.
Таким образом, предлагаемое техническое решение позволяет повысить дальность применения ракеты класса «воздух-воздух», самонаводящейся полупассивным способом.
Источники информации
1. Авиационные системы радиоуправления. Т.2. Радиоэлектронные системы самонаведения / Под ред. А.И.Канащенкова и В.И.Меркулова. - М.: Радиотехника, 2003. - 390 с.
2. Казаков В.Д. и др. Радиоэлектронные средства систем управления ПВО и ВВС. - М.: Военное издательство, 1987, с.с.168, 198.
3. Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. - М.: Радио и связь, 1977, 392 с.
4. Павлов В.И., Маштак А.А., Зайцев Д.В. Способ полупассивного самонаведения управляемых ракет класса «воздух-воздух» с радиолокационной головкой самонаведения. Патент РФ на изобретение № 2181869, 2002.
5. Радиоэлектронное подавление информационных каналов систем управления оружием / Под ред. М.Ю. Перунова. - М.: Радиотехника. 2003. - 416 с.
6. Помехозащита радиоэлектронных систем управления летательными аппаратами и оружием. Монография / Под ред. В.Н. Лепина. - М.: Радиотехника. 2017. - 416 с.
7. Радиолокационные системы многофункциональных самолетов. Т.1. РЛС -
информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2006, с. 126.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУПАССИВНОГО САМОНАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ КЛАССА "ВОЗДУХ - ВОЗДУХ" С РАДИОЛОКАЦИОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2000 |
|
RU2181869C2 |
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при воздействии по основному лепестку диаграммы направленности антенны помехи типа DRFM | 2019 |
|
RU2724116C1 |
| Способ формирования помехи типа "антипод" | 2021 |
|
RU2777922C1 |
| Способ функционирования активной радиолокационной головки самонаведения управляемой ракеты "воздух - воздух" при её самонаведении на вертолет и постановке им уводящих по дальности и скорости помех | 2024 |
|
RU2835459C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ДОПОЛНИТЕЛЬНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ ПОДЪЕМНОГО ТИПА | 2005 |
|
RU2287168C1 |
| СПОСОБ ЗАЩИТЫ ВОЗДУШНОГО СУДНА ОТ УПРАВЛЯЕМЫХ РАКЕТ С ОПТИЧЕСКИМИ ГОЛОВКАМИ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2819940C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ И РАЗВЕДЫВАТЕЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2205418C1 |
| СПОСОБ И СИСТЕМА ЗАЩИТЫ ВОЗДУШНОГО СУДНА ОТ УПРАВЛЯЕМЫХ РАКЕТ С ОПТИЧЕСКИМИ ГОЛОВКАМИ САМОНАВЕДЕНИЯ | 2019 |
|
RU2726351C1 |
| Способ обеспечения помехозащищенности бортовой радиолокационной станции при постановке прицельных по частоте помех станцией активных помех | 2022 |
|
RU2780470C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ПЕРЕИЗЛУЧАЮЩЕГО ЭКРАНА | 2001 |
|
RU2210089C2 |
Изобретение относится к радионаведению самодвижущихся снарядов, в частности к самонаведению авиационных управляемых ракет класса «воздух-воздух». Техническим результатом является повышение дальности применения ракеты в условиях действия маскирующих и имитирующих помех. Заявляемый способ состоит в том, что на носителе ракеты с помощью вспомогательной РЛС предварительно определяют направление на цель и формируют зондирующий сигнал в направлении цели для провокации ее помеховых станций на излучение помехового сигнала, по которому производят наведение управляемой ракеты. 3 ил.
Способ управления направлением излучения зондирующего сигнала при реализации полупассивного самонаведения управляемых ракет класса «воздух-воздух» с радиолокационной головкой самонаведения, заключающийся в том, что на носителе посредством радиолокационной станции Х-диапазона формируют зондирующий сигнал в направлении цели для провокации ее помеховых станций на излучение помехового сигнала, регистрируют отраженный от цели сигнал или сигналы имитирующих и маскирующих помех, по которым производят наведение управляемой ракеты, отличающийся тем, что в случае отсутствия отраженного от цели сигнала или сигналов имитирующих и маскирующих помех дополнительно на борту носителя посредством вспомогательной радиолокационной станции L-диапазона формируют зондирующий сигнал в направлении цели, определяют направление на цель, при этом при осуществлении сопровождения цели посредством вспомогательной РЛС L-диапазона управляют направлением излучения зондирующего сигнала для провокации помеховых станций цели на излучения помехового сигнала таким образом, чтобы излучение РЛС Х-диапазона было соосным излучению вспомогательной РЛС L-диапазона, причем при отсутствии помеховых излучений в Х-диапазоне управление направлением излучения зондирующего сигнала РЛС Х-диапазона осуществляют с периодическим изменением параметров зондирующего сигнала Х-диапазона.
| СПОСОБ ПОЛУПАССИВНОГО САМОНАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ КЛАССА "ВОЗДУХ - ВОЗДУХ" С РАДИОЛОКАЦИОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2000 |
|
RU2181869C2 |
| СПОСОБ ПОРАЖЕНИЯ НАЗЕМНЫХ СТАНЦИЙ АКТИВНЫХ ПОМЕХ БОРТОВЫМ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ САМОЛЕТОВ САМОНАВОДЯЩИМСЯ ПО РАДИОИЗЛУЧЕНИЮ ОРУЖИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2506522C2 |
| ПОДСТРИГАЕВ А.С., СМОЛЯКОВ А.В., СЛОБОДЯН М.Г | |||
| Анализ плотности распределения типов РЛС в частотном диапазоне // Журнал Радиоэлектроники, ISSN 1684-1719, N 7, 2016, 23 с | |||
| ДВУХДИАПАЗОННАЯ АКТИВНАЯ РАДИОЛОКАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2019 |
|
RU2733918C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ-ПОСТАНОВЩИКА КОГЕРЕНТНЫХ ПОМЕХ РАКЕТАМИ С АКТИВНЫМИ РАДИОЛОКАЦИОННЫМИ ГОЛОВКАМИ САМОНАВЕДЕНИЯ | 2015 |
|
RU2586819C9 |
| УПРАВЛЯЕМЫЙ АРТИЛЛЕРИЙСКИЙ СНАРЯД | 2013 |
|
RU2527609C1 |
| JPH 11183100 A, 06.07.1999 | |||
| US 8138982 B1, | |||
