Изобретение относится к медицинской технике и может использоваться в лечебно-профилактических учреждениях, осуществляющих свою деятельность по профилям медицинская реабилитация и спортивная медицина, для определения механических характеристик биологических тканей, как сенсорная система при управлении роботизированным манипулятором.
Актуальность изобретения состоит в высокой востребованности для клинической медицины в точных устройствах для определения характеристик упругости и болевой чувствительности поверхностных мягких тканей.
Известно устройство, содержащее антропоморфный манипулятор робота с электромеханическими приводами, конечное звено которого оснащено массажным инструментом (Рос. патент №2145833, А61Н 7/00, 1998). Устройство способно проводить широкий диапазон массажных операций, однако не обеспечивает высокой объективизации массажа из-за отсутствия контроля усилия манипулятора и режима тензоалгометрического контроля состояния мягких тканей.
Наиболее близким по технической сущности к предлагаемому устройству является биоуправляемый робот, содержащий силовой датчик, связанный с роботизированным манипулятором и с диагностическим блоком, содержащим средства записи параметров мышечного тонуса в диагностируемых точках (Патент РФ на полезную модель №105588, А61Н 15/00, 2011). Устройство способно работать в режиме диагностики мышечного тонуса, позволяя судить о тонизации или релаксации заинтересованных участков, но обладает ограниченными функциональными возможностями по контролю усилия взаимодействия конечного звена манипулятора с мягкими тканями и упругими материалами, а также по проведению тензоалгометрии (количественной оценки болевой чувствительности при деформации мягких тканей) в диагностируемых точках из-за отсутствия возможности формировать управляющие команды
Техническим результатом предлагаемого устройства является повышение эффективности контроля усилия взаимодействия пластины индентора (элемента прибора для измерения твердости, вдавливаемого в испытываемый материал) роботизированного манипулятора, с мягкими тканями в диагностируемых точках, и выведении полученных результатов измерения давления в международной системе единиц физических величин (кг), а также повышении объективизации тензоалгометрии при появлении в процессе контроля ощущения болезненности у пациента, что выгодно отличает ее от прототипа.
Указанный технический результат достигается тем, что для тензоалгометрического обследования используется индентор на базе системы скелетно-мышечного тестирования MES 9000 (производства Myotronics-Noromed Inc., США, регистрационное удостоверение Федеральной службы по надзору в сфере здравоохранения и социального развития №ФСЗ 2008/01481), жестко связанный с роботизированным манипулятором и с диагностическим блоком, содержащим силовой датчик и концевой выключатель, при этом диагностический блок выполнен в виде кнопочного выключателя, сигнал с которого последовательно передается через цифровой вход модуля ввода-вывода на центральный процессор с помощью магистрали, через которую преобразованный сигнал также передается на цифровой вход контроллера, вырабатывающего сигнал на первый вход последовательного порта персонального компьютера, на второй вход последовательного порта персонального компьютера поступает сигнал с выхода аналого-цифрового преобразователя, на вход которого поступает сигнал с выхода силового датчика индентора системы скелетно-мышечного тестирования MES 9000, установленного на конечном звене манипулятора, причем выход датчика усилия соединен с аналоговым входом контроллера, при этом контроллер имеет выходной цифровой канал, по которому передаются данные на магистраль, связанную с системой управления манипулятором.
Описание устройства.
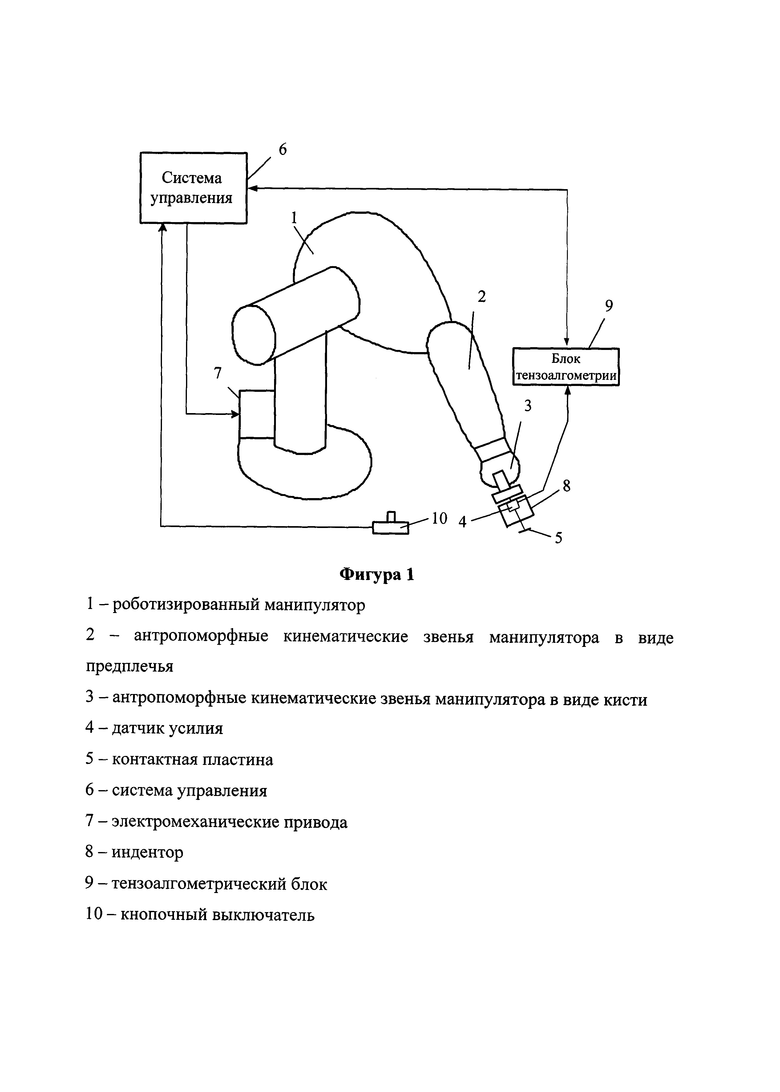
Робот 1 имеет антропоморфную кинематику из звеньев в виде предплечья 2 и кисти 3, оснащенной датчиком 4 усилия и контактной пластиной 5, а также систему управления 6, связанную с электромеханическими приводами 7, индентор 8, тензоалгометрический блок 9 и нормально разомкнутый кнопочный выключатель для пациента.
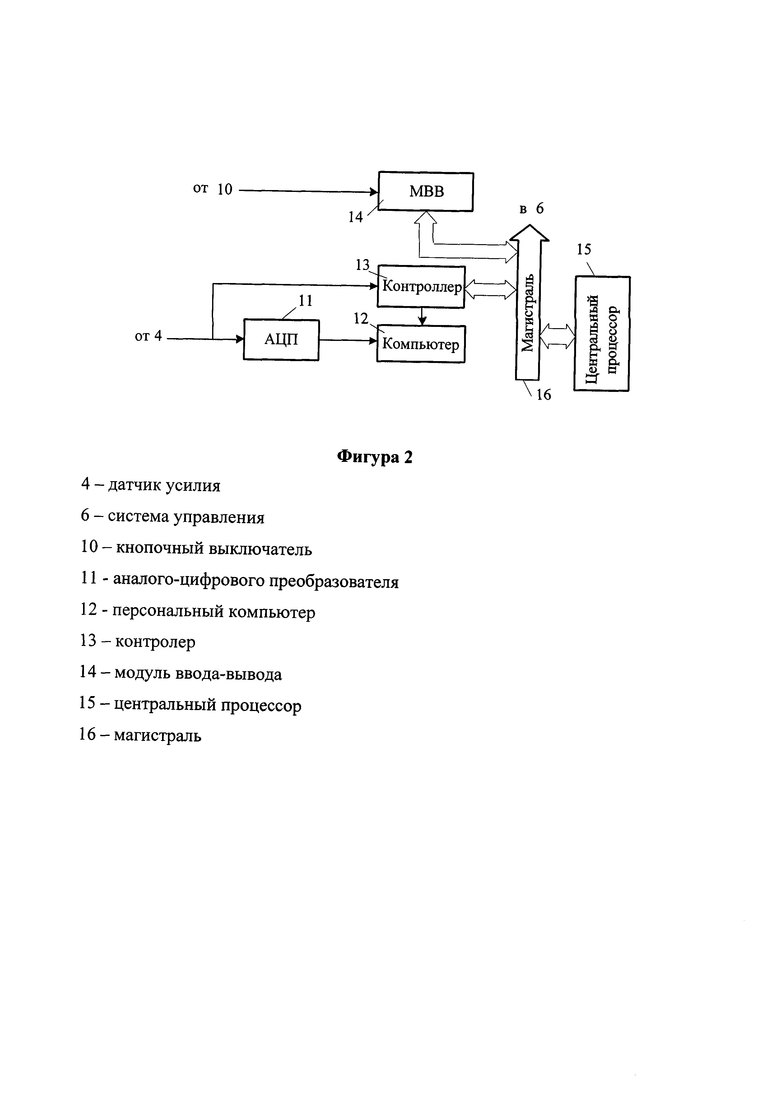
Тензоалгометрический блок 9 содержит кнопочный выключатель 10, сигнал с которого последовательно передается через цифровой вход модуля 14 ввода-вывода на центральный процессор 15 с помощью магистрали 16, через которую преобразованный сигнал также передается на цифровой вход контроллера 13 вырабатывающего сигнал на первый вход последовательного порта персонального компьютера 12, на второй вход последовательного порта персонального компьютера 12 поступает сигнал с выхода аналого-цифрового преобразователя 11, на вход которого поступает сигнал с выхода силового датчика 4, причем выход датчика усилия соединен с аналоговым входом контроллера 13, при этом контроллер имеет цифровой канал, по которому передаются данные на магистраль 16 входящую в систему управления 6.
Сущность предлагаемого устройства поясняется рисунками (Фиг. 1; Фиг. 2).
Описание работы устройства.
Действие аппаратной части тензоалгометрического блока системы управления роботизированным манипулятором основано на том, что контрактная пластина 5 индентора 8 последовательно проходит между деформируемыми диагностируемыми точками выполняя надавливание в каждой точке, координаты которых рассчитываются в системе управления 6, которая вырабатывает управляющие воздействия на электромеханические привода 7 звеньев плеча 1, предплечья 2 и кисти 3 антропоморфного манипулятора устанавливаемого оператором над проекцией первой диагностируемой точки в полуавтоматическом режиме, при необходимости с уточняющей ручной подстройкой направления контактной пластины 5.
Последовательность прохождения контактной пластины 5 индентора 8 по точкам траекторий на поверхности мягкой ткани формируется в системе управления 6. Запись контактных усилий при погружении контактной пластины 5 в диагностируемые точки производится тензоалгометрической системой MES 9000, от момента ее касания поверхности мягкой ткани до момента отрыва контактной пластины в диагностируемой точке вследствие подачи команды активации кнопочного выключателя 10 о прекращении надавливания. При отсутствии сигнала с кнопочного выключателя деформирование в текущей диагностируемой точке завершается по достижению границы заданного диапазона усилия. Поскольку контроль максимального значения границы диапазона усилия осуществляется контроллером блока тензоалгометрии 9, то аналоговый сигнал усилия с силового датчика 4, преобразованный контроллером в цифровой сигнал передается на модуль 14 ввода-вывода системы управления 6, для прекращения надавливания манипулятором 3 на текущую диагностируемую точку и перехода к следующей диагностируемой точке.
При появлении команды от пациента с кнопочного выключателя 10 данный сигнал поступает на вход модуля 14 ввода-вывода системы управления 6, после преобразования поступает на центральный процессор 15, где так же формируется информация о координатах диагностируемых точек и куда поступает сигнал о достижении границ силового диапазона. Процедура контроля усилия как в случае наличия команды со стороны пациента через кнопочный выключатель 10, так и при достижении максимального значения границы диапазона усилия, если команда от пациента не поступила, состоит в том, что манипулятор 3 оказывающий давление через индентор 8 на мягкую ткань в диагностируемой точке обеспечивает равномерный рост усилия, которое одновременно считывается силовым датчиком 4 и контроллером 13, скорость и точность вдавливания формируются командами центрального процессора 15 с помощью программно установленных шагов поперечного смещения, на каждом из которых контроллер 13 и центральный процессор 15 опрашивают сигналы с концевого выключателя 10 и силового датчика 4. При появлении сигнала с кнопочного выключателя 10 происходит остановка робота 3, надавливание прекращается, происходит считывание информации о усилии соответствующем моменту нажатия кнопочного выключателя 10. Сигнал усилия поступает на вход аналогово-цифрового преобразователя 11 и на аналоговый вход контроллера 13. Когда кнопочный выключатель 10 не сработал, сигнал остановки манипулятора 3 выдает контроллер 13 в момент когда усилие с силового датчика 4 становится равно или превышает максимальное значение границы силового диапазона. После команды остановки с центрального процессора 15 данные, о количестве пройденных шагов находятся в контроллере 13. Полученные сигналы в оцифрованном виде передаются на вход последовательного порта персонального компьютера 12 и после преобразования посредством программного обеспечения формируют участки массива тензоалгометрической диаграммы.
По истечению времени измерения в текущей точке центральный процессор 15 подает сигнал манипулятору 3 на перемещение над диагностируемой точкой и переход к проекции над следующей диагностируемой точкой. В момент механического разъединения пластины 5 с мягкой тканью аналогово-цифровой преобразователь 11 прекращает считывать сигнал усилия. Возобновление записи нового объема силовой информации для очередной диагностируемой точки происходит при механическом контакте пластины 5 с мягкой тканью очередной диагностируемой точки.
Последовательный опрос сигналов с силового датчика 4 и кнопочного выключателя 10 в диагностируемых точках через модуль ввода-вывода 14, аналого-цифровой преобразователь 11, контроллер 13, магистраль 16 и центральный процессор 15 позволяют сформировать в персональном компьютере 12 массив данных для построения тензоалгометрических диагностических диаграмм наглядно отражающих объективную силовую информацию.
Последовательность прохода манипулятором 3 траекторий состоящих из диагностируемых точек определяется заданным массивом координат записанных в системе управления 6. Индентор 8 установленный на фланце манипулятора 3, последовательно обходит через заданные координаты точек и в каждой из них контролирует усилия, встроенным силовым датчиком 4 на тех траекториях, через которые осуществляется проход. При появлении силовой информации в пределах границ силового диапазона в каждой диагностируемой точке предусмотрена фиксация усилия соответствующего команде пациента от кнопочного выключателя 10, согласно программно заданному условию смещения манипулятора 3 деформирующего мягкую ткань в диагностируемой точке с усилием ΔF, которое задается неравенствами:
если Fmin<ΔF←Fk, то Δzi+1=-Δ,
если Fmin=ΔF←Fk, Fmax=ΔF←Fk, то Δzi+1=0,
где Fmin÷Fmax - диапазон контролируемого усилия задаваемый программно; ΔF - текущее усилие развиваемое манипулятором при деформации мягкой ткани в диагностируемых точках; Fk - усилие соответствующее достигнутому значению ΔF при активации пациентом концевого выключателя; Δ - шаг погружения контактной пластины индентора при перемещении манипулятора в направлении оси z.
Таким образом, достигается повышение эффективности и объективизация метода тензоалгометрии при взаимодействии манипулятора через индентор с мягкими тканями и используемым кнопочным выключателем для самоконтроля пациента в процессе тензоалгометрического исследования состояния мягких тканей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ топографической тензоалгометрии | 2018 |
|
RU2711377C2 |
| СПОСОБ МАССАЖА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2145833C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| ОЦЕНКА УСИЛИЯ НА РОБОТОХИРУРГИЧЕСКОМ ИНСТРУМЕНТЕ | 2019 |
|
RU2721462C1 |
| ОЦЕНКА УСИЛИЯ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИЧЕСКОЙ СИСТЕМЫ МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА | 2007 |
|
RU2462342C2 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2012 |
|
RU2518806C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ БЕСПРОВОДНОЕ УСТРОЙСТВО СО СМЕННЫМИ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ ДЛЯ ИЗМЕРЕНИЯ ИХ УГЛОВ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ И ВОЗДЕЙСТВУЮЩИХ НА НИХ СИЛ И МОМЕНТОВ ПРИ ПРОВЕДЕНИИ НЕЙРОХИРУРГИЧЕСКИХ ОПЕРАЦИЙ | 2022 |
|
RU2807937C1 |
| ПЕРЕНОСНОЙ ПРОГРАММНО-ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2363975C2 |
| ИНЪЕКЦИОННАЯ СИСТЕМА ДЛЯ САМОСТОЯТЕЛЬНЫХ ИНЪЕКЦИЙ | 2008 |
|
RU2471514C2 |
Тензоалгометрический блок системы управления роботизированным манипулятором относится к медицинской технике. Тензоалгометрический блок системы управления роботизированным манипулятором содержит индентор. Индентор жестко связан с манипулятором. Манипулятор содержит силовой датчик и концевой выключатель. Концевой выключатель находится у пациента для алгометрического обследования. Диагностический блок реализуется в виде кнопочного выключателя. Сигнал с диагностического блока с помощью магистрали последовательно передается через цифровой вход модуля ввода-вывода на центральный процессор, а также на цифровой вход контроллера. Контроллер вырабатывает сигнал на первый вход последовательного порта персонального компьютера. Сигнал с выхода аналого-цифрового преобразователя поступает на второй вход последовательного порта персонального компьютера. На вход аналого-цифрового преобразователя поступает сигнал с выхода силового датчика индентора системы скелетно-мышечного тестирования MES 9000. Датчик индентора системы скелетно-мышечного тестирования установлен на конечном звене манипулятора. Выход датчика усилия соединен с аналоговым входом контроллера. Контроллер имеет выходной цифровой канал, по которому передаются данные на магистраль. Магистраль связана с системой управления манипулятором. Изобретение обеспечивает повышение эффективности контроля усилия взаимодействия пластины роботизированного манипулятора с мягкими тканями в диагностируемых точках, повышение объективизации тензоалгометрии при появлении в процессе контроля ощущения болезненности у пациента. 2 ил.
Тензоалгометрический блок системы управления роботизированным манипулятором, содержащий индентор, жестко связанный с манипулятором, содержащим силовой датчик и концевой выключатель, находящийся у пациента для его алгометрического обследования, отличающийся тем, что диагностический блок реализуется в виде кнопочного выключателя, сигнал с которого последовательно передается через цифровой вход модуля ввода-вывода на центральный процессор с помощью магистрали, через которую преобразованный сигнал также передается на цифровой вход контроллера, вырабатывающего сигнал на первый вход последовательного порта персонального компьютера, на второй вход последовательного порта персонального компьютера поступает сигнал с выхода аналого-цифрового преобразователя, на вход которого поступает сигнал с выхода силового датчика индентора системы скелетно-мышечного тестирования MES 9000, установленного на конечном звене манипулятора, причем выход датчика усилия соединен с аналоговым входом контроллера, при этом контроллер имеет выходной цифровой канал, по которому передаются данные на магистраль, связанную с системой управления манипулятором.
| Машина для обрезки корневищ и стеблей у головок лука | 1956 |
|
SU105588A1 |
| WO 2011082712 A1, 14.07.2011 | |||
| WO 2016189093 A1, 01.12.2016 | |||
| СПОСОБ ПРОГНОЗИРОВАНИЯ ЭФФЕКТИВНОСТИ МАНУАЛЬНОЙ ТЕРАПИИ ПРИ ЛЕЧЕНИИ ДИСФУНКЦИИ ВИСОЧНО-НИЖНЕЧЕЛЮСТНОГО СУСТАВА | 2006 |
|
RU2295282C1 |
| Многоканальное устройство приоритета | 1988 |
|
SU1520515A1 |
| WO 2017052173 A2, 30.03.2017. | |||

