Область техники, к которой относится изобретение
Изобретение относится к области медицинской техники, а именно к устройствам и хирургическим инструментам, применяемым в нейрохирургии для работы, связанной с прорезанием отверстия в мягкой ткани, установкой или удалением внутренних фиксирующих устройств. Например, для выполнения операций транспедикулярной фиксации позвонков используют следующие основные хирургические инструменты: шило, зонд прямой, зонд изогнутый, метчик, устройства для завинчивания транспедикулярных винтов и гаек. В данном изобретении предлагается использование шестиосевого инерциального датчика ориентации, для определения углов ориентации устройства, далее их преобразование в линейное перемещение относительно оси вкручивания, основываясь на известных параметрах резьбы хирургического инструмента или винта-импланта. Также при взаимодействии хирургического инструмента или винта-импланта с тканью человека из-за трения возникает крутящий момент, значение величины этого момента позволяет косвенно оценить характеристику мягкой ткани. Объединение данных параметров в зависимость крутящего момента, действующего на хирургический инструмент во время хирургической манипуляции, от перемещения этого хирургического инструмента вдоль оси вкручивания (винта или метчика) позволяет составить характеристику процессов, происходящих в мягкой ткани пациента при формировании резьбы отверстия метчиком или при ввинчивании винта-импланта. Полученные данные могут быть классифицированы и использованы при дальнейшем анализе хирургических манипуляций.
Известны патенты на устройства и хирургические инструменты для проведения нейрохирургических операций, направленные на использование данных об ориентации хирургического инструмента:
WO 2004/112610 А2 (09.06.2004) - съемное миниатюрное устройство, измеряющее ориентацию хирургического инструмента, посредством встроенных микроэлектромеханических гироскопов. Крепление устройства происходит к цилиндрической части хирургического инструмента с помощью ремешков. Вывод данных об ориентации происходит во встроенный LED экран. Данное навигационное устройство возможно использовать с очень широким набором хирургических инструментов, но крепление к корпусу на ремешки не обладает должной надежностью, также достоверность определения углов ориентации хирургического инструмента напрямую зависит от места и способа закрепления этого устройства. Применяется при протезировании нижних конечностей, для более точного контроля при использовании и инвазивных хирургических инструментов и подготовки мягкой ткани к установке импланта.
WO 2020 219925 A1 (29.10.2020) - автономное съемное миниатюрное устройство, измеряющее ориентацию объекта посредством встроенных акселерометра, гироскопа и магнитометра. Крепление устройства к хирургическому инструменту происходит посредством винтов и специальной треноги, для сигнализации хирургу о происходящих процессах присутствует небольшой встроенный LED экран и возможность проводного подключения внешнего устройства. Сбор и обработка данных не предусмотрена. Применяется в сборке с различными хирургическими устройствами: дрель, эндоскопический схват, шило, метчик, транспедикулярная отвертка. Задача устройства состоит в выводе данных об углах ориентации наклона хирургического инструмента относительно оси вкручивания.
US 2015 0201918 A1 (23.07.2015) - мануальное медицинское устройство с возможностью смены хирургического инструмента и имеющее в своем составе разнообразные виды датчиков, включая акселерометр и гироскоп. Для проведения хирургических манипуляций в устройство встроен электродвигатель, питание которого происходит посредством гибкого провода, инерциальный датчик ориентации используется для компенсации отклонений от основного осевого направления сверления, вкручивания или иных манипуляций. Получение данных на персональный компьютер и их дальнейшая обработка не предусмотрена. Применяется для проведения ортопедических операций по протезированию нижних конечностей человека.
WO 2021/072061 А1 (08.10.2020) - устройство, устанавливаемое в ручку нейрохирургического шила, применяемого при проведении операций по транспедикулярной фиксации. Устройство измеряет углы наклона хирургического инструмента относительно аксиальной и сагиттальной плоскости, позволяя определить оптимальное направление для ввинчивания винта-импланта. Измерение ориентации происходит посредством встроенных инерциальных датчиков ориентации (связка акселерометр и гироскоп). Данные об ориентации по беспроводному интерфейсу BLE передаются на персональный компьютер, далее происходит оповещение хирурга о текущем значении угла ориентации. Данное устройство встраивается в ручку транспедикулярного шила и не имеет возможности использования с другими хирургическими инструментами.
Представленные ранее устройства определяют ориентацию хирургического инструмента в пространстве, автономны и позволяют давать информацию или сигнализировать о превышении допустимого угла наклона устройства при проведении нейрохирургических операций. Но данные устройства не оснащены датчиками сил и моментов, поэтому область их применения ограничена только определением ориентации устройства и его корректировка хирургом.
Известны патенты на медицинские устройства с возможностью измерения силы и момента, действующих на хирургический инструмент во время проведения нейрохирургической операции:
RU 2462342 С2 (25.10.2007) - система для оценки усилия в хирургическом манипуляторе для минимального инвазивного вмешательства с использованием шестиосевых датчиков сил и моментов, действующих на хирургический инструмент при проведении хирургических манипуляций. Данная система не имеет возможности мануального использования для сбора и обработки данных.
Известны патенты на устройства с возможностью одновременного измерения ориентации в пространстве хирургического инструмента и действующих на него сил:
US 11135024 В2 (05.10.2021) - фланец для медицинского робота, оснащенный шестиосевым датчиком сил и моментов, действующих на хирургический инструмент, во время проведения хирургических манипуляций и инерциальным измерительным модулем. Конструкция фланца спроектирована таким образом, чтобы уменьшить время замены хирургического инструмента и сохранить универсальность применения с различными видами медицинских манипуляторов. Недостатком данного изделия является отсутствие возможного мануального применения хирургом и отсутствие возможности сбора и анализа данных о проведенных хирургических манипуляциях.
WO 2018/144282 А1 (24.01.2018) - автономное устройство для измерения ориентации хирургического инструмента и действующих на него силы при операции на коленном суставе. Данное устройство имеет несколько сменных хирургических инструментов. Особенность данного устройства заключается в выводе данных об измеряемых величинах непосредственно на корпус устройства, данные об ориентации выводятся на небольшой LED экран, встроенный в торец, данные о силе представляются на двухстороннем сигнальном табло. Недостатком данного устройства является одноосевой датчик силы, отсутствие системы обработки, для последующей визуализации и использования данных, невозможность использования хирургических инструментов для транспедикулярной фиксации (шила, метчика, транспедикулярной отвертки и пр.).
В качестве ближайшего аналога (прототипа) выбран патент RU 2736162 С2 (29.04.2019), это устройство со сменными хирургическими инструментами для измерения воздействующих на них сил и моментов от взаимодействия с тканями пациентов при проведении нейрохирургических операций. Устройство включает в себя ручку для мануальных манипуляций, имеющую крепление с фиксатором в виде кнопки, переходной фланец для крепления шестиосевого датчика сил и моментов, шестиосевой датчик сил и моментов, и сменные хирургические инструменты, сопрягаемые с конструктивными соединениями. Однако, данное устройство не имеет возможности измерения ориентации хирургического инструмента и получение данных происходит посредством проводного интерфейса, что затрудняет работу хирурга. Также отсутствует метод обработки и комплексирования данных о крутящем моменте и линейном перемещении.
Раскрытие сущности изобретения
Предлагаемое изобретение направлено на решение задачи измерения углов ориентации в пространстве хирургического инструмента, и действующих на него сил, и моментов, возникающих от взаимодействия сменных (имеющих возможность замены) хирургических инструментов с тканями человека.
Технический результат - получение количественных данных об углах ориентации в пространстве хирургических инструментов, силах и моментах, возникающих от манипуляций хирургическими инструментами во время проведения нейрохирургической операции. Полученные данные обрабатываются с применением методов математической статистики и
результатом данных вычислений является зависимость крутящего момента, действующего на хирургический инструмент, от величины перемещения вдоль оси вкручивания устройства при проведении хирургической манипуляции с мягкой тканью человека.
Поставленная задача решается, а заявленный технический результат достигается тем, что в многофункциональном беспроводном (для удобства хирурга) устройстве для измерения ориентации в пространстве, а также сил и моментов, действующих на хирургический инструмент, конструктивно основанном на единой ручке, в которую встроены: шестиосевой датчик сил и моментов для измерения сил и моментов, и шестиосевого инерциального датчика ориентации (гироскоп и акселерометр), измеряющего углы ориентации устройства в пространстве. Данные, получаемые с датчиков, передаются по беспроводному интерфейсу на персональный компьютер, где происходит их обработка и представление в графическом виде. Использование сменных хирургических инструментов для проведения нейрохирургических манипуляций возможно с помощью съемного соединения, в котором зажим хирургического инструмента происходит посредством кнопочно-пружинного механизма, похожая система реализована в ближайшем прототипе (аналоге). Включение и отключение происходит посредством рычажкового переключателя в многофункциональном устройстве, включение происходит перед началом проведения хирургических манипуляций и требует время на инициализацию датчиков (20 секунд).
Заявленное техническое решение позволяет, в отличие от ближайшего прототипа, определять ориентацию хирургического инструмента в 3-х мерном пространстве, не препятствовать работе хирурга (отсутствие провода) и производить дальнейшую обработку данных для представления зависимости крутящего момента от перемещения хирургического инструмента. Сигнализирование о превышении допустимого значения перемещения, сил и моментов возможно благодаря применению метода обработки данных. Метод обработки данных включает в себя три части: преобразование данных об угле поворота устройства, конвертация угла поворота в линейное перемещение, основанное на известных параметрах резьбы и фильтрация значений крутящего момента от неликвидных данных, появление которых вызвано мануальным характером использования устройства. Для использования метода аккумулирование данных происходит в удобном для математических операций формате, в данном случае используется формат .csv и .xlsx, каждый файл содержит информацию о временном отрезке манипуляции, значений сил и моментов в трехмерном пространстве (3 значения для сил и 3 значения для крутящих моментов) и включает в себя кватернион (что полностью описывает ориентацию устройства в трехмерном пространстве).
Краткое описание чертежей
Изобретение иллюстрируется изображениями, где:
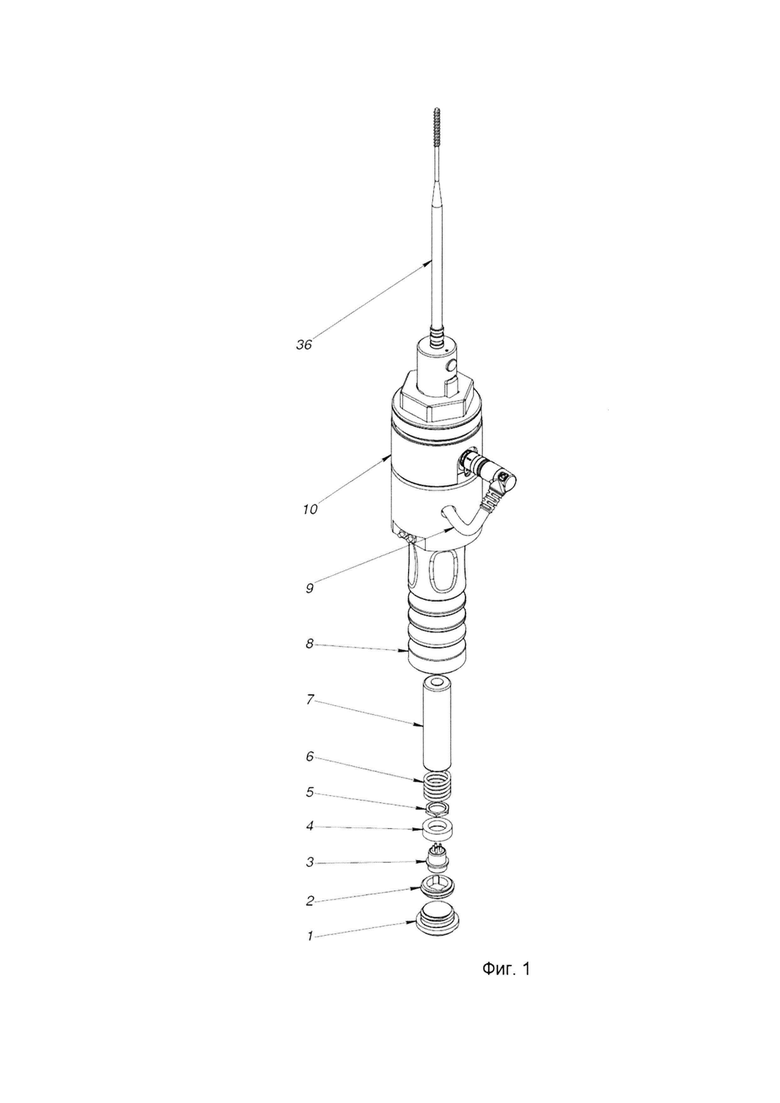
на фигуре 1 показана подробная внутренняя конструкция ручки многофункционального беспроводного устройства,
на фигуре 2 показана подробная внутренняя конструкция корпуса многофункционального беспроводного устройства,
на фигуре 3 показана подробная внутренняя конструкция конечного звена многофункционального беспроводного устройства,
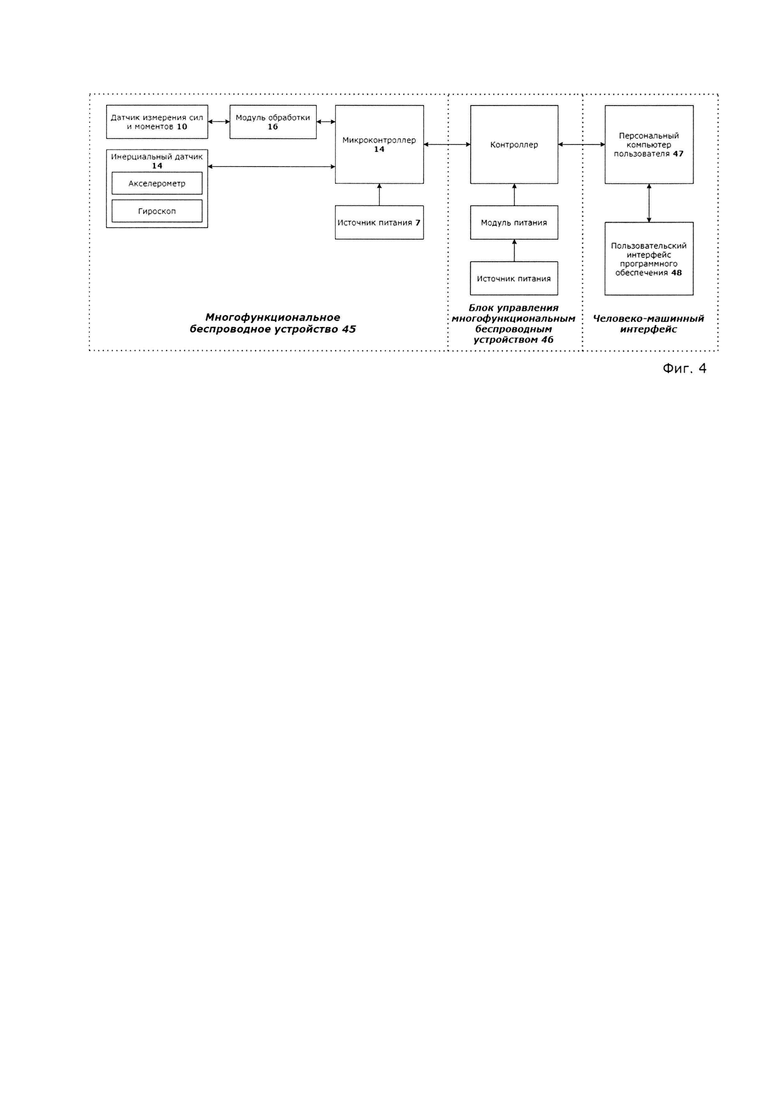
на фигуре 4 показана структурная схема системы обработки данных многофункционального устройства,
на фигуре 5 показана фотография многофункционального устройства, блока управления, набора сменных хирургических инструментов и персонального компьютера,
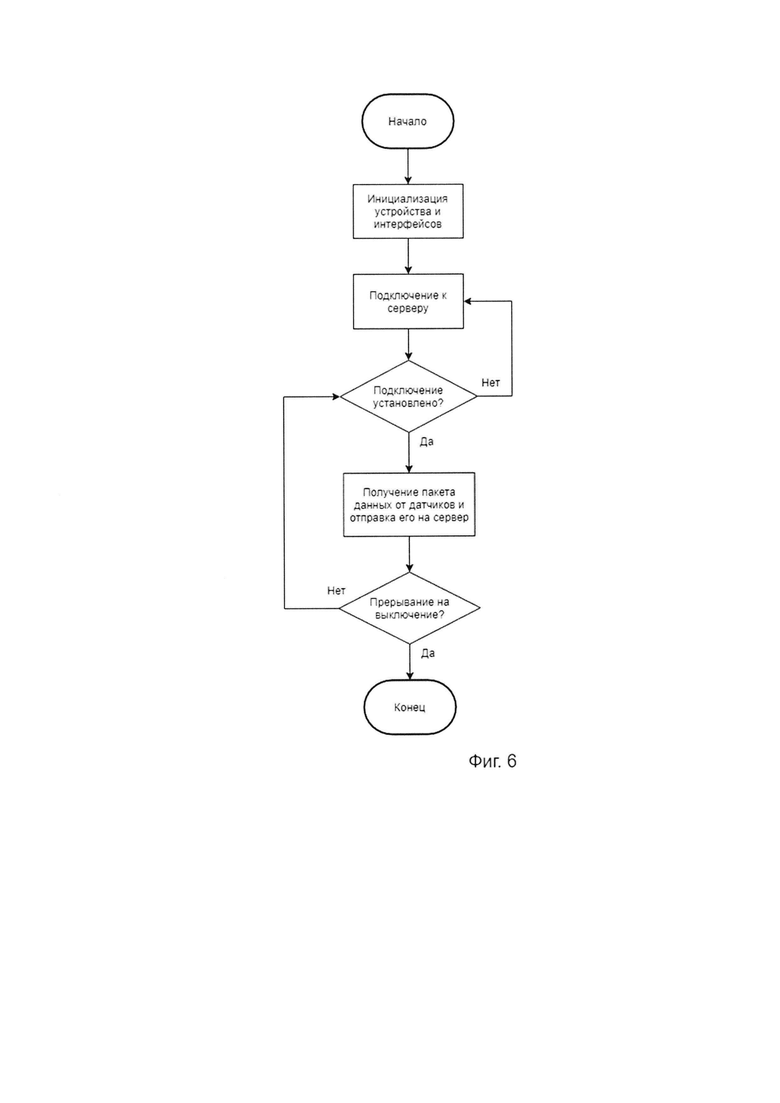
на фигуре 6 показан алгоритм работы программного обеспечения контроллера в многофункциональном устройстве,
на фигуре 7 показан алгоритм работы программного обеспечения блока управления устройством,
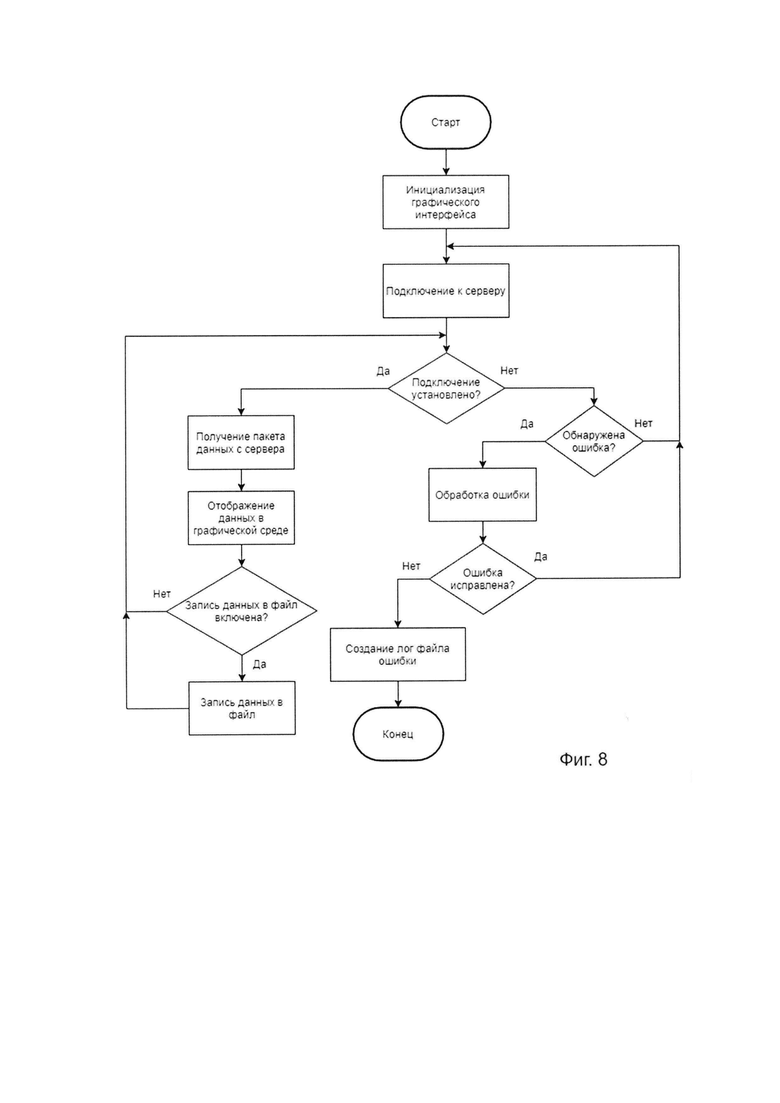
на фигуре 8 показан алгоритм работы программного обеспечения человеко-машинного интерфейса,
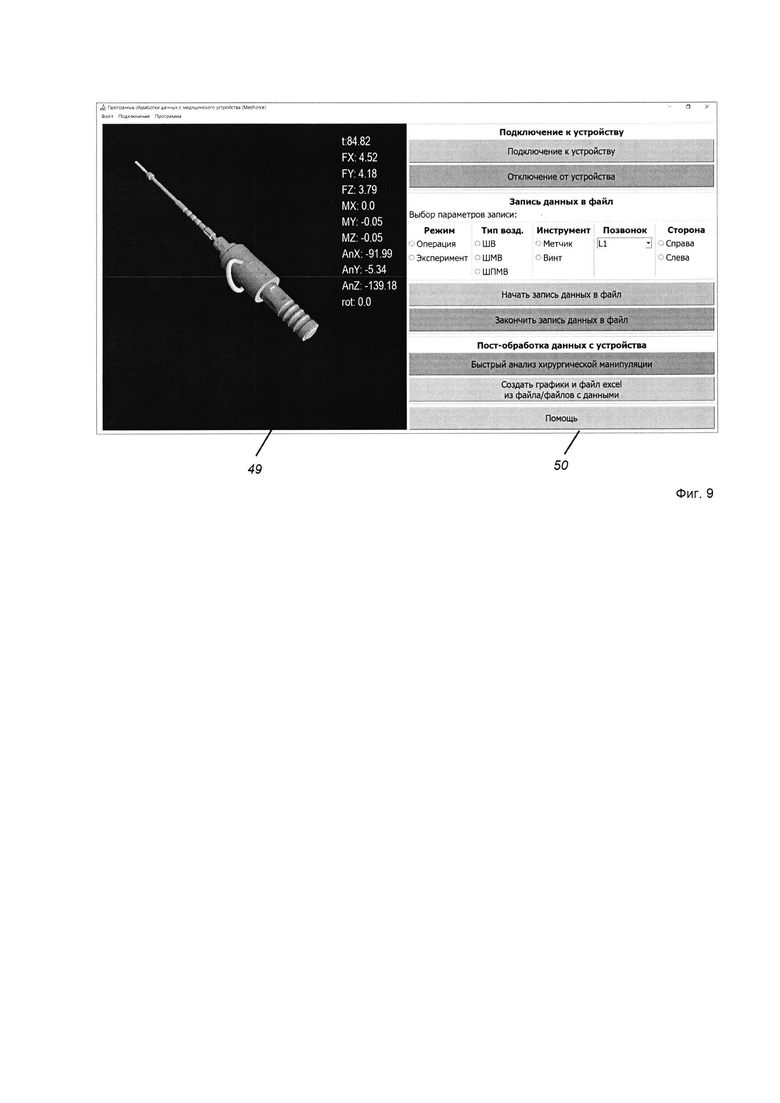
на фигуре 9 показан пользовательский интерфейс программного обеспечения человеко-машинного интерфейса,
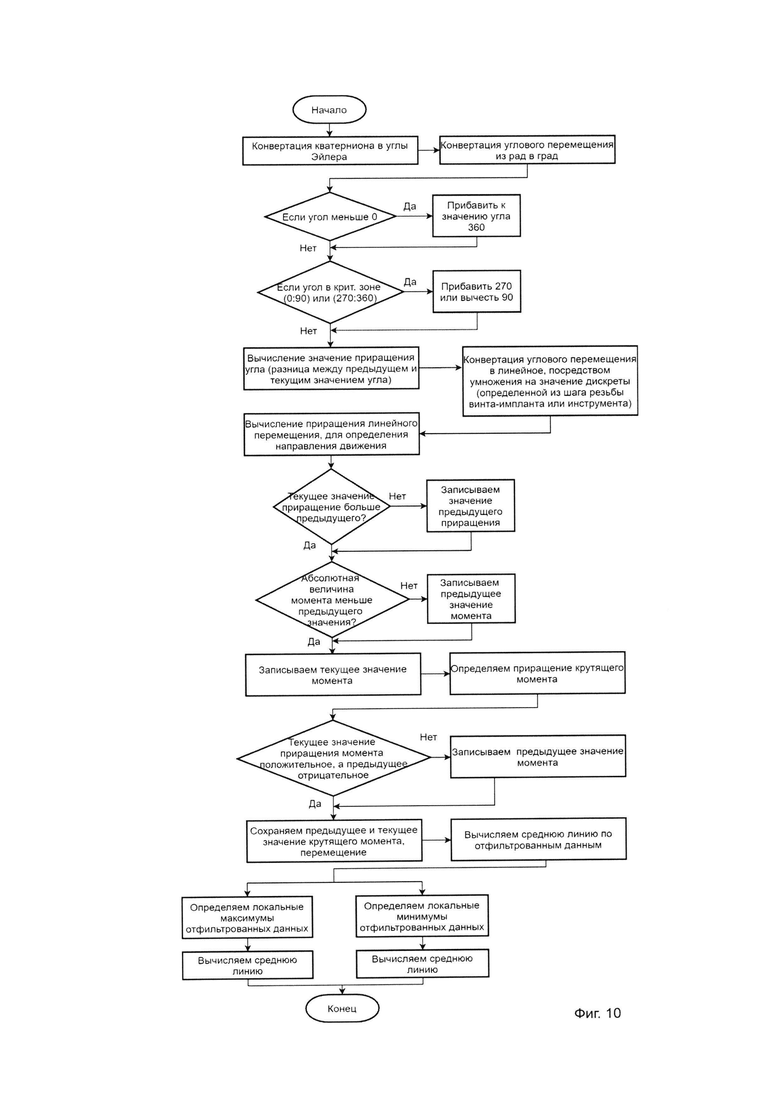
на фигуре 10 показан алгоритм обработки данных об ориентации устройства, сил и моментов, действующих на хирургический инструмент,
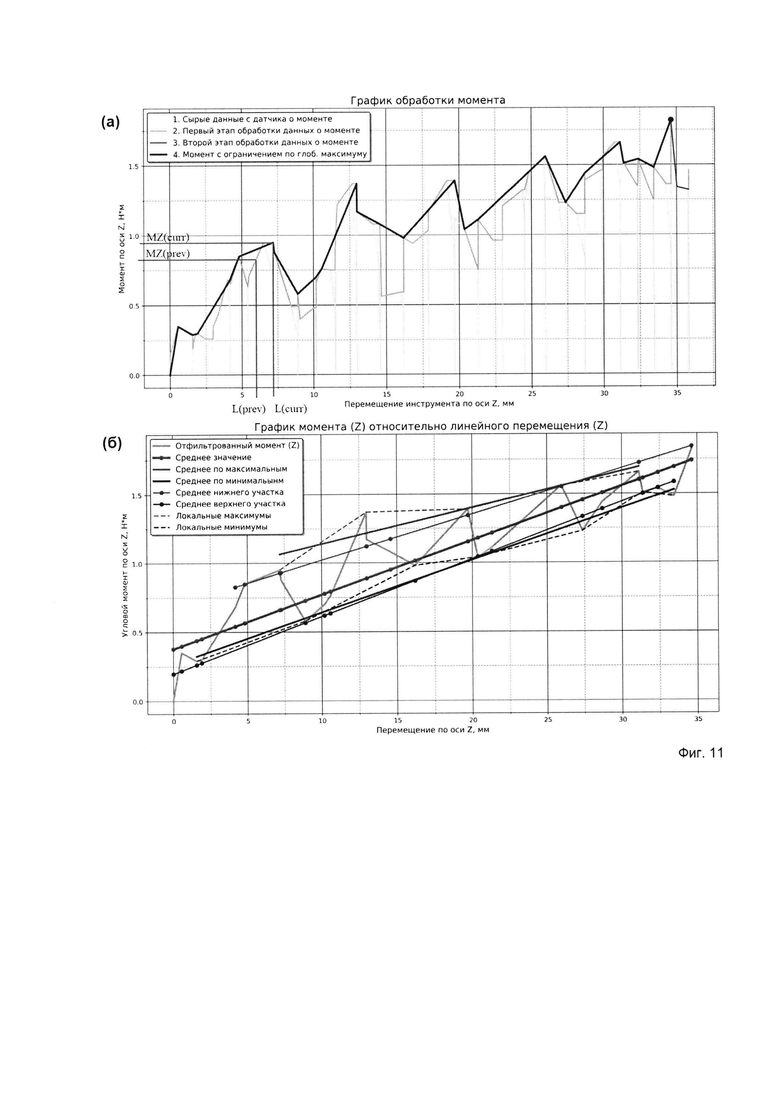
на фигуре 11 (а) и (б) показан график обработки данных о крутящем моменте и перемещении устройства и график зависимости крутящего момента от перемещения.
Позиции, приведенные на изображениях, соответствуют следующему:
1. Крышка с резьбой, служащая для защиты электронных компонентов, находящихся в ручке, от влияния внешней среды.
2. Гайка с наружной резьбой, служит для закрепления коннектора питания внутри ручки.
3. Разъем питания, установленный в ручке многофункционального устройства, используется для зарядки аккумулятора и передачи информации на контроллер многофункционального устройства.
4. Втулка, к которой крепится разъем питания, для установки внутрь полой ручки.
5. Гайка для разъема питания, обеспечивающая жесткое крепление разъема питания в ручке многофункционального устройства.
6. Пружина, для закрепления неподвижно аккумулятора внутри ручки многофункционального устройства.
7. Аккумулятор, установленный в ручке и обеспечивающий автономную работу всех электронных компонентов многофункционального устройства.
8. Оболочка для ручки, которая обеспечивает минимальное проскальзывание и удобное использование многофункционального устройства при мануальных операциях хирургом.
9. Разъем для подключения шестиосевого датчика сил и моментов к плате преобразования сигнала многофункционального устройства.
10. Шестиосевой датчик сил и моментов, обеспечивающий измерений сил и моментов, действующих на хирургический инструмент во время проведения нейрохирургической операции.
11. Полая ручка, предназначенная для мануальных манипуляций, проводимых хирургом, вмещает в себя аккумулятор и коннектор питания.
12. Гайки, установленные в пазы на ручке, используются для жесткого крепления плат и держателя аккумулятора.
13. Плоская деталь-прижим, для жесткого крепления аккумулятора в полости ручки.
14. Плата контроллера для управления многофункционального устройства, содержит гироскоп и акселерометр для определения ориентации в пространстве хирургического инструмента и устройство передачи данных через беспроводной интерфейс.
15. Стойки для крепления плат управления, обеспечивающие жесткое крепление основных электронных компонентов к торцевой поверхности ручки внутри корпуса многофункционального устройства.
16. Плата преобразования сигнала с шестиосевого датчика сил и моментов в цифровой сигнал, для дальнейшей передачи в контроллер многофункционального устройства.
17. Деталь корпус, служащая для защиты электронных компонентов устройства от воздействия внешней среды.
18. Гайки, обеспечивающие жесткое крепление корпуса к ручке.
19. Цилиндрическая деталь, удерживающая аккумулятор в полости ручки.
20. Стойки для крепления платы преобразования сигнала к плате управления.
21. Коннекторы для подключения платы преобразования данных с шестиосевого датчика сил и моментов к контроллеру многофункционального устройства.
22. Винты для крепления платы преобразования данных с шестиосевого датчика сил и моментов к стойкам крепления.
23. Винты, обеспечивающие жесткое крепление корпуса к ручке.
24. Винты, обеспечивающие жесткое крепление внешней платы управления к корпусу.
25. Внешняя плата управления, имеющая управляющую кнопку в виде электромеханического рычажного переключателя и светодиод.
26. Гайки, обеспечивающие крепление внешней платы управления к корпусу.
27. Винты, обеспечивающие жесткое крепление корпуса к шестиосевому датчику сил и моментов.
28. Фланец крепления к шестиосевому датчику сил и моментов, который обеспечивает жесткую установку необходимых деталей и хирургических.
29. Винты, обеспечивающие жесткое крепление фланца к шестиосевому датчику сил и моментов многофункционального устройства.
30. Зажим для чехла, накручивается на фланец и обеспечивает крепление чехла к устройству.
31. Кнопка для крепления к фланцу, используется для более жесткой установки хирургического инструмента во фланце, который крепится к шестиосевому датчику сил и моментов и обеспечивает быструю смену хирургического инструмента во время нейрохирургической операции.
32. Кнопка для смены хирургического инструмента, позволяющая установить сменные хирургические инструменты.
33. Съемное крепление хирургического инструмента, обеспечивающее быструю смену хирургического инструмента во время нейрохирургической операции.
34. Штифт, устанавливается в паз в деталь съемное крепление, и ограничивает относительное линейного движение кнопок.
35. Пружины, используются для обеспечения работы кнопок в съемном креплении.
36. Сменный хирургический инструмент - метчик для нарезания резьбы с цилиндрическим креплением.
37. Сменный хирургический инструмент - шило с цилиндрическим креплением.
38. Сменный хирургический инструмент для закручивания транспедикулярных винтов с цилиндрическим креплением.
39. Сменный хирургический инструмент для закручивания транспедикулярных гаек с цилиндрическим креплением.
40. Сменный хирургический инструмент для коррекции положения транспедикулярного стержня с цилиндрическим креплением.
41. Сменный хирургический инструмент пробник, изогнутый для создания канала в мягкой ткани пациента с цилиндрическим креплением.
42. Сменный хирургический инструмент пробник прямой для создания канала в мягкой ткани пациента с цилиндрическим креплением.
43. Сменный хирургический инструмент пробник острый для создания канала в мягкой ткани пациента с цилиндрическим креплением.
44. Винт-имплант, используемый в транспедикулярной фиксации позвоночника человека.
45. Многофункциональное беспроводное устройство со сменными хирургическими инструментами для измерения их ориентации в пространстве и воздействующих на них сил и моментов при проведении нейрохирургических операций.
46. Блок управления многофункциональным беспроводным устройством.
47. Персональный компьютер, используемый для записи и обработки данных.
48. Программное обеспечение многофункционального беспроводного устройства.
49. Часть пользовательского интерфейса человеко-машинного интерфейса, используемая для вывода данных с датчиков.
50. Часть пользовательского интерфейса человеко-машинного интерфейса, используемая для управления потоком данных с устройства.
Осуществление изобретения
Многофункциональное беспроводное устройство со сменными хирургическими инструментами для измерения их углов ориентации в пространстве и воздействующих на них сил и моментов при проведении нейрохирургических операций - это изобретение, имеющее исполнение в металле (нержавеющая медицинская сталь) и в пластике, позволяющих проводить измерения в ходе проведения хирургических манипуляций в нейрохирургии.
Многофункциональное беспроводное устройство для измерения сил и моментов, воздействующих на хирургические инструменты и определения углов ориентации этого хирургического инструмента при проведении нейрохирургических операций показано на фигуре 1, 2 и 3 оно состоит из ручки 11, имеющую внутреннюю полость для аккумуляторной батареи 7, которая питает все электронные компоненты многофункционального устройства, и
разъема проводного интерфейса 3 для подключения зарядного устройства, неподвижность разъема в ручке обеспечивается гайкой 5, которая крепит его к втулке 4 и в последствии зажимается гайкой с внешней резьбой 2. Защиту от воздействия внешней среды на аккумуляторную батарею 7 обеспечивает завинчивающаяся крышка 1, неподвижность обеспечивается пружиной 6. К ручке, посредством винтов 23 и гаек 18, жестко крепится цилиндрический корпус 17, аккумуляторная батарея 7 устанавливается внутрь полой ручки через верхнее отверстие и зажимается деталью 19 и 13, далее на стойки 20 устанавливается контроллер 14, содержащий в себе шестиосевой инерциальный датчик ориентации (акселерометр и гироскоп) и модуль беспроводной передачи данных, далее на стойки 15 и коннекторы 21 устанавливается модуль обработки сигналов с шестиосевого датчика сил и моментов 16. Также внутри корпуса установлена гибкая плоская антенна и внешняя плата управления с управляющей кнопкой в виде рычажкового переключателя и светодиодом 25, прикрученная к корпусу на винты 24 и гайки 26. На верхнюю торцевую поверхность корпуса 17, посредством винтов 27, установлен шестиосевой датчик сил и моментов 10 подключенный, посредством проводного коннектора 9 к модулю преобразования сигнала 16, который в свою очередь через два разъема для объединения плат 21, передает данные на контроллер 14. К шестиосевому датчику сил и моментов 10, посредством винтов 29 устанавливается основной фланец 28, на который последовательно, с нажатием кнопки 31, закручивается дополнительное съемное крепление для хирургического инструмента 33, и, с нажатием кнопки 32, сменный хирургический инструмент: метчик, для нарезания резьбы 36, шило 37, отвертка для закручивания транспедикулярных винтов 38, отвертка для закручивания транспедикулярных гаек 39, транспедикулярная вилка 40, пробник транспедикулярный изогнутый 41, пробник транспедикулярный прямой 42 и пробник прямой острый 43. Такое крепление позволит быстро и без проведения дополнительной стерилизации менять хирургический инструмент хирургу во время проведения нейрохирургической операции. Поверх основного фланца 28 накручивается зажим для хирургического изоляционного чехла 30. Данные об ориентации в пространстве, силах и моментах действующих на хирургический инструмент поступают на контроллер 14, он в свою очередь формирует пакет данных и отправляет их на удаленный сервер в блоке управления 46 по беспроводному интерфейсу, где они записываются в буфер и через другой беспроводной интерфейс передаются на персональный компьютер, где через человеко-машинный интерфейс отображаются в удобном для пользователя виде, а также возможна дальнейшая работа с данными, запись в лог-файл, математическая обработка и визуализация данных.
Удаленный сервер, в блоке управления 46, для передачи данных между многофункциональным устройством и пользователем, имеет возможность подключения нескольких устройств и нескольких пользователей.
Алгоритм работы программного обеспечения, исполняющийся контроллером, установленным в многофункциональном беспроводном устройстве представлен на фигуре 6. После подачи питания контроллер осуществляет инициализацию внутренних интерфейсов, для получения данных с шестиосевого инерциального датчика ориентации и шестиосевого датчика сил и моментов, далее по беспроводному интерфейсу производит подключение к серверу, при успешном исходе, начинает передачу данных в бесконечном цикле с заданной частотой, при отключении от сервера, производит повторное подключение.
Алгоритм работы программного обеспечения, исполняющийся контроллером системы управления представлен на фигуре 7. После подачи питания контроллер осуществляет инициализацию сервера и ожидает подключения клиентов. Сервер рассчитан на любое количество, как отправляющих, так и принимающих данные устройств. При подключении нового автономного устройства - начинается запись данных в буфер, при подключении нового клиента, ему начинается передача данных со всех автономных устройств. На всех этапах работы сервера происходит проверки на наличие ошибок, при наличии которых происходит их обработка и логирование.
Алгоритм работы программного обеспечения человеко-машинного интерфейса представлен на фигуре 8. На первом этапе происходит инициализация графического интерфейса приложения. Далее происходит попытка подключения к серверу системы управления в качестве принимающего клиента, при положительном результате которой, начинается получение данных, последующий их вывод в графическое окно программы, и при необходимости запись в файл. В случае отрицательного результата подключения к серверу происходит проверка на наличие ошибок. Далее происходит либо обработка ошибки, либо повторное подключение к серверу. Пользовательский интерфейс программного обеспечения представлен на фигуре 9, состоит из двух смысловых частей: поле для вывода данных с датчиков с 3D визуализацией ориентации устройства 48 и управляющей панелью, с кнопками подключения, записи и конвертации файлов с данными 49.
Алгоритм обработки данных представлен на фигуре 10. Обработка данных об угле поворота усовершенствованного многофункционального устройства заключается в поэтапной трансформации данных к наглядному и удобному виду, что позволит, на основе этих данных, получить максимально точную оценку линейного перемещения устройства. Обработка данных об ориентации устройства выполняется поэтапно и включает в себя следующие пункты:
1. Определение приращения угла поворота относительно оси Z в градусах.
В первую очередь необходимо конвертировать кватернион поворота, полученный с устройства в угол поворота относительно оси Z в виде угла Эйлера:
где х, у, z, w - компоненты кватерниона вращения, полученные с устройства. Преобразуем радианы в градусы в значении угла поворота устройства относительно оси Z:
Для удобства расчетов переведем значения угла поворота устройства из интервала (-180; 180) в интервал (0; 360):
Для корректного определения приращения угла поворота в цикле, необходимо определять и исправлять значения угла поворота при переходе от 360 до 0 и от 0 до 360. Для этого в каждый момент времени определяется входит ли значение угла поворота в некоторый интервал (например, (270:90), (310:60) и т.д.), в котором переход наиболее вероятен и происходит пересчет значения приращения:
где zcurr - значение угла поворота, полученное с устройства в текущей точке времени, град; zprev - значение угла поворота, полученное с устройства в предыдущей точке времени, град.
2. Определение линейного перемещения устройства по оси Z.
Значение дискреты (discr) для определения величины линейного перемещения из углового перемещения определяется из условия осевого перемещения винта на значение шага при одном обороте [11]:
discr=Pscrew/360°
На основе отфильтрованных данных о приращении угла поворота устройства относительно оси Z (). Суммарное линейное перемещение устройства относительно оси Z (L) выражается из суммарного углового перемещения устройства:
Lsum=ϕsum⋅discr
Для определения актуального направления движения на каждом шаге алгоритма находим разницу текущего и предыдущего значения пути:
Далее следует избавиться от периодических резких падений значения крутящего момента, действующего на хирургический инструмент, т.к. угол поворота, а, следовательно, и крутящий момент, при мануальной хирургической манипуляции ограничен:
3. Фильтрация значения крутящего момента по оси Z.
Для фильтрации момента учитываем только те моментные точки, которые измерены при соблюдении первого условия предыдущей формулы. Далее записываем значения линейного перемещения и крутящий момент действующий на хирургический инструмент, при соблюдении следующего условия:
Для определения актуального направления изменения крутящего момента на каждом шаге алгоритма находим разницу текущего и предыдущего значения момента:
Далее происходит итоговая фильтрация значений крутящего момента, действующего на хирургический инструмент, по следующему условию:
На основе массива отфильтрованных данных о крутящем моменте строится средняя линия. Для более качественной оценки процесса проведения хирургической манипуляции определяем значения локальных максимумов и минимумов крутящего момента по следующему условию:
Для количественной оценки тренда изменения крутящего момента во время проведения хирургической манипуляции по значениям локальных максимумов и минимумов также строятся средние линии.
Примером, показывающим работоспособность устройства, являются зависимости, получаемые при обработке экспериментальных данных от вкручивания винтов-имплантов. При этом, вкручивание винтов имплантов может осуществляться в материалы со свойствами, находящимися в пределах эксплуатационных характеристик шестиосевого датчика сил и моментов и шестиосевого инерциального датчика ориентации, используемых в настоящем многофункциональном устройстве. Таким образом, измеряемые предельные значения силовых характеристик и моментных характеристик находятся в значениях 500 Н и 5 Н*м. А измеряемое предельное значение скорости считывания характеристик ориентации многофункционального устройства в пространстве не превышает 100 градусов в секунду. Зависимости получаемых моментов сопротивления вращению винта-импланта в материалах иллюстрируются при помощи графиков. График обработки крутящего момента и результирующий график зависимости крутящего момента от перемещения хирургического инструмента представлен на фигуре 11 (а). Итоговый график зависимости крутящего момента от перемещения представлен на фигуре 11 (б).
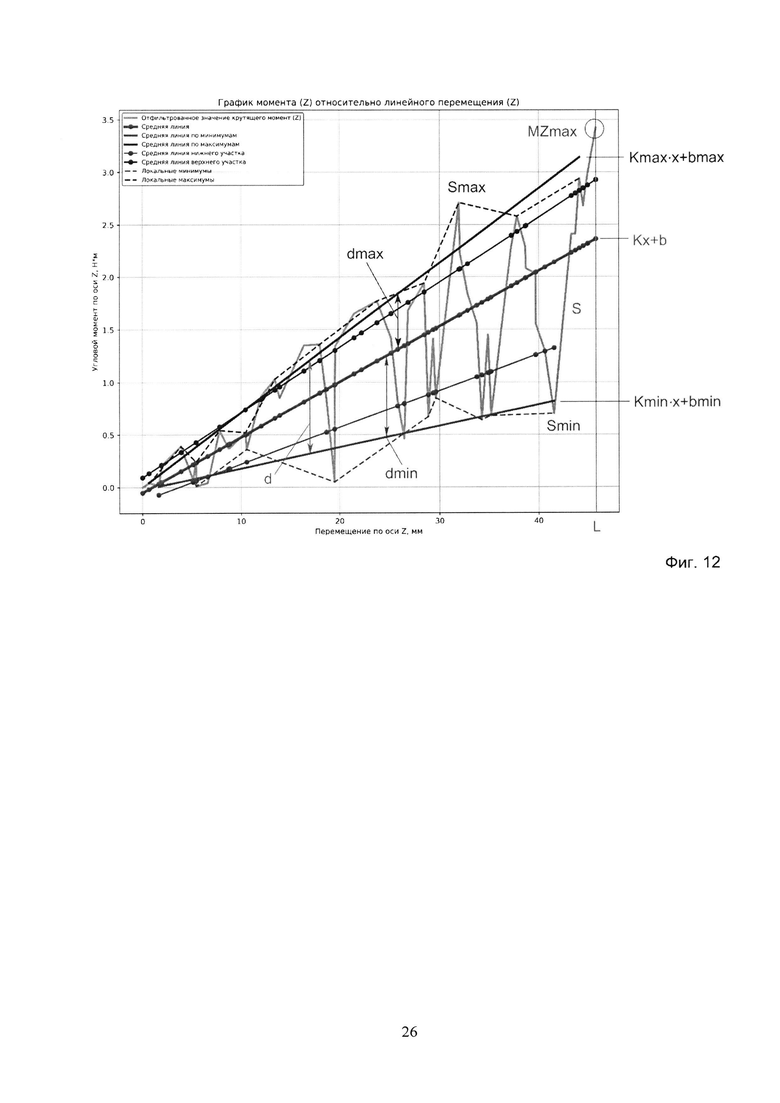
Дополнительно, результаты обработки зависимостей могут быть выражены критериями. Для этого, использовались следующие полученные ключевые критерии, количественно описывающие процесс проведения хирургической манипуляции по созданию резьбы метчиком или вкручиванию винта-импланта в мягкой ткани пациента:
1. Значение линейного перемещения хирургического инструмента по оси Z. (L).
2. Максимальное по модулю значение крутящего момента, действующего на хирургический инструмент по оси Z. (MZmax).
3. Коэффициент наклона средней линии отфильтрованного значения крутящего момента, действующего на хирургический инструмент по оси Z. (K).
4. Смещение средней линии отфильтрованного значения крутящего момента, действующего на хирургический инструмент по оси Z. (b).
5. Среднеквадратическое отклонение отфильтрованного значения крутящего момента, действующего на хирургический инструмент по оси Z, относительно средней линии. (S).
6. Среднее значение крутящего момента между средними линиями по минимумам и максимумам крутящего момента, действующего на хирургический инструмент по оси Z. (d).
7. Коэффициент наклона средней линии по локальным максимумам отфильтрованного значения крутящего момента, действующего на хирургический инструмент по оси Z. (Kmax).
8. Смещение средней линии по локальным максимумам отфильтрованного значения крутящего момента, действующего на хирургический инструмент по оси Z. (bmax).
9. Среднеквадратическое отклонение локальных максимумов отфильтрованного значения крутящего момента, действующего на хирургический инструмент по оси Z, относительно средней линии по локальным максимумам. (Smax).
10. Среднее значение крутящего момента между средней линией и средней линией по локальным максимумам крутящего момента, действующего на хирургический инструмент по оси Z. (dmax).
11. Коэффициент наклона средней линии по локальным минимумам отфильтрованного значения крутящего момента, действующего на хирургический инструмент по оси Z. (Kmin).
12. Смещение средней линии по локальным минимумам отфильтрованного значения крутящего момента, действующего на хирургический инструмент по оси Z. (bmin).
13. Среднеквадратическое отклонение локальных минимумов отфильтрованного значения крутящего момента, действующего на хирургический инструмент по оси Z, относительно средней линии по локальным минимумам. (Smin).
14. Среднее значение крутящего момента между средней линией и средней линией по локальным минимумам крутящего момента, действующего на хирургический инструмент по оси Z. (dmin).
На фигуре 12 представлен график зависимости отфильтрованного крутящего момента (Z) от линейного перемещения (Z) с отмеченными критериями, количественно описывающими процесс проведения хирургической манипуляции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональное устройство со сменными хирургическими инструментами для измерения воздействующих на них сил и моментов при проведении нейрохирургических операций | 2019 |
|
RU2736162C2 |
| ЭКСПЕРТНАЯ СИСТЕМА НА БАЗЕ МЕДИЦИНСКОГО МАНИПУЛЯЦИОННОГО РОБОТА ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ ФИКСАЦИИ ПОЗВОНОЧНИКА | 2023 |
|
RU2833780C1 |
| Двухслойный фантом позвонка с регулируемыми силовыми параметрами при деформировании за счёт изменения соотношения компонентов материала | 2022 |
|
RU2801492C1 |
| МЕХАТРОННАЯ СИСТЕМА ФОРМИРОВАНИЯ ИНДИВИДУАЛЬНОГО ИНТРАОПЕРАЦИОННОГО ПОЛОЖЕНИЯ ПАЦИЕНТА | 2022 |
|
RU2803982C1 |
| Роботизированный мультифункциональный лазерный хирургический комплекс | 2018 |
|
RU2693216C1 |
| Навигационный комплекс для интраоперационного ориентирования при установке винтовых систем транспедикулярной фиксации в целевые позвонки | 2021 |
|
RU2770666C1 |
| УСТРОЙСТВО ДЛЯ ЧРЕСКОЖНОГО УДАЛЕНИЯ ГРЫЖ МЕЖПОЗВОНКОВЫХ ДИСКОВ ШЕЙНОГО ОТДЕЛА ПОЗВОНОЧНИКА С ЭНДОСКОПИЧЕСКОЙ АССИСТЕНЦИЕЙ | 2022 |
|
RU2790945C1 |
| Самовсплывающая портативная донная сейсмическая станция без оставления груза на дне моря | 2022 |
|
RU2796944C1 |
| КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ ТРАНСКРАНИАЛЬНОЙ МАГНИТНОЙ СТИМУЛЯЦИИ | 2023 |
|
RU2817476C1 |
| УСТРОЙСТВО ДЛЯ ЧРЕСКОЖНОГО УДАЛЕНИЯ ГРЫЖ МЕЖПОЗВОНКОВЫХ ДИСКОВ ШЕЙНОГО ОТДЕЛА ПОЗВОНОЧНИКА С ЭНДОСКОПИЧЕСКОЙ АССИСТЕНЦИЕЙ | 2020 |
|
RU2759406C1 |




Изобретение относится к медицинской технике, а именно к устройствам и хирургическим инструментам, применяемым в нейрохирургии для работы, связанной с прорезанием отверстий в мягких тканях, установкой или удалением внутренних фиксирующих устройств. Беспроводное устройство для измерения углов ориентации и определения воздействующих сил и моментов на сменные хирургические инструменты при проведении нейрохирургических операций включает полую ручку для мануальных операций, содержащую аккумуляторную батарею для питания всех электронных частей, корпус, внутри которого установлены шестиосевой инерциальный датчик ориентации на базе гироскопа и акселерометра, контроллер, модуль обработки сигналов с шестиосевого датчика сил и моментов и внешняя плата управления с управляющей кнопкой и светодиодом. К торцевой части корпуса прикреплен шестиосевой датчик сил и моментов, на который установлен фланец и резьбовой съемный держатель с кнопками, позволяющий быструю смену хирургических инструментов во время операции. Шестиосевой датчик сил и моментов и шестиосевой датчик ориентации связаны с контроллером в корпусе, который, в свою очередь, по беспроводному интерфейсу связан с блоком управления устройством для беспроводного подключения, управления и приема данных персональным компьютером пользователя с возможностью записи и отображения данных в графической, звуковой и световой форме с визуальной индикацией при превышении предельных заданных параметров манипуляции. Техническим результатом является получение количественных данных об углах ориентации в пространстве хирургических инструментов, силах и моментах, возникающих от манипуляций хирургическими инструментами во время проведения нейрохирургической операции. 12 ил.
Беспроводное устройство для измерения углов ориентации и определения воздействующих сил и моментов на сменные хирургические инструменты при проведении нейрохирургических операций, включающее полую ручку для мануальных операций, содержащую аккумуляторную батарею, для питания всех электронных частей, корпус, внутри которого установлены шестиосевой инерциальный датчик ориентации на базе гироскопа и акселерометра, контроллер, модуль обработки сигналов с шестиосевого датчика сил и моментов и внешняя плата управления с управляющей кнопкой и светодиодом, к торцевой части корпуса прикреплен шестиосевой датчик сил и моментов, на который установлен фланец и резьбовой съемный держатель с кнопками, позволяющий быструю смену хирургических инструментов во время операции, при этом шестиосевой датчик сил и моментов и шестиосевой датчик ориентации связаны с контроллером в корпусе, который, в свою очередь, по беспроводному интерфейсу связан с блоком управления устройством для беспроводного подключения, управления и приема данных персональным компьютером пользователя с возможностью записи и отображения данных в графической, звуковой и световой форме с визуальной индикацией при превышении предельных заданных параметров манипуляции.
| СПОСОБ АДАПТИВНОГО ПРЕОБРАЗОВАНИЯ, ОСНОВАННЫЙ НА ВНУТРИКАДРОВОМ ПРЕДСКАЗАНИИ, И УСТРОЙСТВО, ИСПОЛЬЗУЮЩЕЕ ТАКОЙ СПОСОБ | 2012 |
|
RU2595587C2 |
| US10905502B2, 02.02.2021 | |||
| EP1986563B1, 26.12.2012 | |||
| US20060243464A1, 02.11.2006 | |||
| US2021236212A1, 05.08.2021 | |||
| EP0902644A1, 24.03.1999. | |||

