Способ детектирования ближнепольного оптического отклика для сканирующего зондового микроскопа (СЗМ) относится к методам ближнепольной оптической микроскопии рассеивающего типа и может быть использован для исследования оптических свойств образцов с нанометровым разрешением, например, позволяет различать металлические, полупроводниковые и диэлектрические участки на поверхности образцов, выполнять картирование образцов в ИК микроскопии и спектроскопии на наноуровне.
Известен способ детектирования ближнепольного оптического отклика для сканирующего зондового микроскопа, включающий сближение осциллирующего на частоте Ω зондового датчика, с образцом, фокусирование на острие зондового датчика оптического излучения с длиной волны λ в диапазоне от 0.4 мкм до 500 мкм источника излучения, посредством фокусирующего элемента, измерение ближнепольного оптического отклика первым синхронным детектором посредством детектирования сигнала оптического детектора на высшей гармонике осцилляций зондового датчика nΩ, где n - порядок высшей гармоники, с использованием схемы интерферометра Майкельсона, в которой модуль подвижки устанавливает зеркало опорного плеча в заданные положения [F. Keilmann and R. Hillenbrand, "Near-field microscopy by elastic light scattering from a tip", Philos. Trans. A. Math. Phys. Eng. Sci., vol. 362, no. 1817, pp. 787-805, 2004].
Этот способ выбран в качестве прототипа предложенного решения.
Недостаток этого способа заключается в том, что механические перемещения зеркала опорного плеча в каждой точке на величину λ/8 ограничивают быстродействие методики скоростью в ~3 мс/точку, так как типичные резонансные частоты модуля подвижки зеркала опорного пучка составляют около 300 Гц. Кроме этого, механические вибрации при перемещениях зеркала приводят к дополнительным вибрациям, увеличивающим погрешность измерения.
Технический результат изобретения заключается в увеличении быстродействия измерения благодаря слежению за фазой регистрируемого сигнала посредством системы обратной связи. Это также приводит к уменьшению механических вибраций и соответственно уменьшению погрешности измерений.
Указанный технический результат достигается тем, что в способе детектирования ближнепольного оптического отклика для сканирующего зондового микроскопа, включающем сближение осциллирующего на частоте Ω зондового датчика, с образцом, фокусирование на острие зондового датчика оптического излучения с длиной волны λ в диапазоне от 0.4 мкм до 500 мкм источника излучения, посредством фокусирующего элемента, измерение ближнепольного оптического отклика первым синхронным детектором посредством детектирования сигнала оптического детектора на высшей гармонике осцилляций зондового датчика nΩ, где n - порядок высшей гармоники, с использованием схемы интерферометра Майкельсона, в которой модуль подвижки устанавливает зеркало опорного плеча в заданные положения, используя систему обратной связи, изменяют положение зеркала опорного плеча посредством модуля подвижки таким образом, чтобы разница фаз ближнепольного оптического отклика и излучения, отраженного от зеркала опорного плеча, поддерживалась постоянной.
Существует вариант, в котором на вход системы обратной связи подают сигнал синусоидальной компоненты оптической амплитуды, измеренный первым синхронным детектором на частоте nΩ, а выходной сигнал системы обратной связи управляет положением зеркала опорного плеча посредством модуля подвижки, компенсируя разницу между сигналом синусоидальной компоненты оптической амплитуды и близким к нулю значением рабочей точки, при этом регистрируется сигнал положения зеркала опорного плеча, который умножают на коэффициент пересчета 4π/λ и получают сигнал фазы оптического отклика.
Существует вариант, в котором после получения сигнала фазы оптического отклика зеркало опорного плеча смещают при помощи модуля подвижки на заданную величину, соответствующую сдвигу фазы опорного пучка на детекторе близким к π/2+πk, k - это целое число, и в этом положении регистрируется сигнал полной оптической амплитуды, измеренный первым синхронным детектором на частоте nΩ, а после этого образец перемещают в новую точку и повторяют описанную выше процедуру в каждой точке сканирования.
Существует вариант, в котором при первом сканировании линии по поверхности образца в каждой точке линии регистрируют положение зеркала опорного плеча, а затем при повторном сканировании той же линии в каждой точке посредством модуля подвижки обеспечивают сдвиг фазы луча, отраженного от зеркала опорного плеча на величину, близкой к π/2+πk, k - это целое число, относительно зарегистрированного при первом сканировании линии положения зеркала опорного плеча в этой же точке, при этом при повторном сканировании линии первым синхронным детектором регистрируется сигнал полной оптической амплитуды на частоте nΩ, после этого образец перемещают на следующую линию и повторяют описанную выше процедуру для каждой следующей линии сканирования.
Существует вариант, в котором с частотой f модулируют сигнал, управляющий положением зеркала опорного плеча посредством модуля подвижки, и на вход системе обратной связи подают сигнал синусоидальной компонентой измеренный вторым синхронным детектором на частоте f, при этом на вход второму синхронному детектору подают сигнал синусоидальной компоненты оптической амплитуды, измеренный первым синхронным детектором на частоте nΩ, и выходной сигнал системы обратной связи изменяет положение зеркала опорного плеча посредством модуля подвижки, компенсируя разницу между сигналом синусоидальной компоненты, измеренный вторым синхронным детектором на частоте f, и близким к нулю значением рабочей точки, при этом в процессе сканирования регистрируется сигнал полной оптической амплитуды и положение зеркала опорного плеча, которое умножают на коэффициент пересчета 4π/λ, и получают сигнал фазы оптического отклика.
Существует вариант, в котором в заданном диапазоне изменяют длину волны λ источника излучения и строят зависимость сигнала полной оптической амплитуды от длины волны λ источника излучения, при этом в результате получается спектральная зависимость амплитуды ближнепольного оптического отклика от длины волны λ.
Существует вариант, в котором положение зеркала опорного плеча регистрируют посредством датчиков смещения.
Существует вариант, в котором угол зеркала опорного плеча поддерживают постоянным при перемещении посредством модуля подвижки с помощью системы обратной связи, на вход которой подаются значения датчиков углового смещения, а выходной сигнал управляет углом модуля подвижки, компенсируя угловые отклонения при перемещениях.
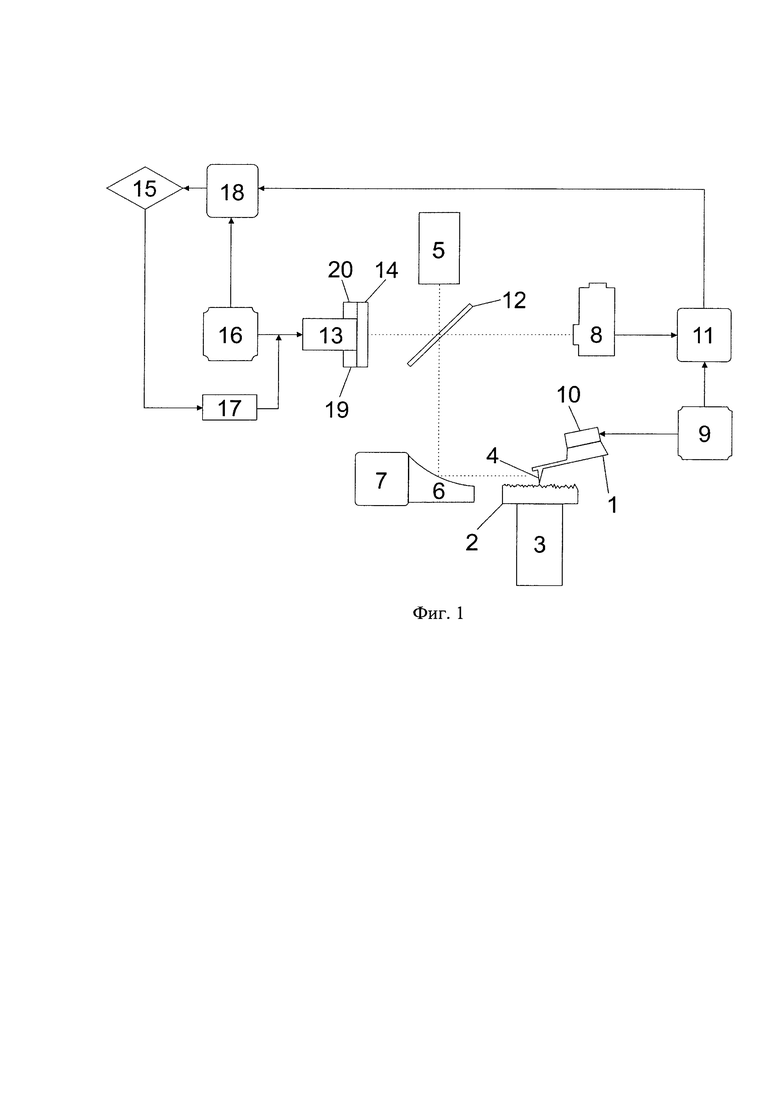
На фиг. 1 изображена принципиальная схема установки для детектирования ближнепольного оптического отклика.
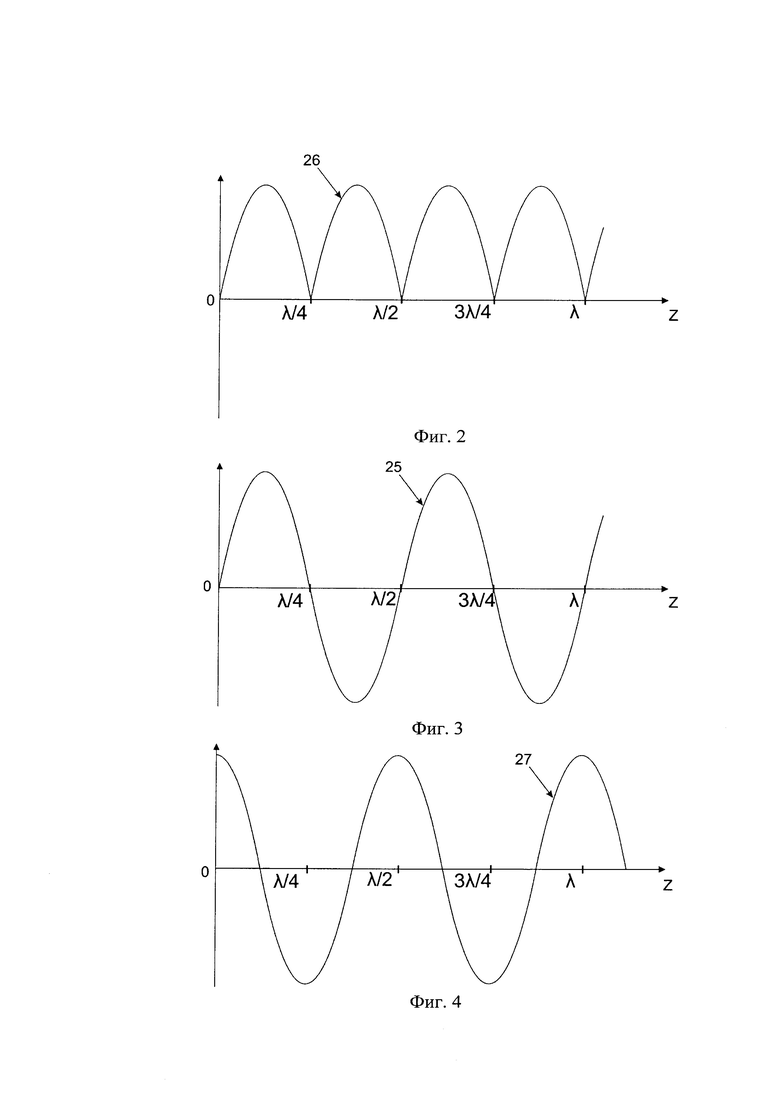
На фиг. 2 изображена зависимость сигнала полной оптической амплитуды от перемещения зеркала опорного плеча.
На фиг. 3 изображена зависимость сигнала синусоидальной компоненты оптической амплитуды от перемещения зеркала опорного плеча.
На фиг. 4 изображена зависимость сигнала синусоидальной компонентой со второго синхронного детектора от перемещения зеркала опорного плеча.
Предложенный способ реализуется на устройстве, схема которого изображена на фиг. 1. Это устройство включает зондовый датчик 1, образец 2, зафиксированный на сканирующем основании 3. Зондовый датчик 1 в зоне взаимодействия с образцом 2 заканчивается острием 4. Источник излучения 5, оптически сопряжен посредством фокусирующего элемента 6 закрепленного на подвижке 7 с острием 4 зондовый датчик 1. Схема СЗМ в общем виде описана в [Миронов, В.Л. Основы сканирующей зондовой микроскопии - Н. Новгород: Институт физики микроструктур, 2004., 110 с.]. Оптический детектор 8 посредством делителя пучка 12 оптически сопряжен с острием 4, которое вносит периодические возмущения в ближнепольный отклик образца. Также с оптическим детектором 8 оптически сопряжено зеркало опорного плеча 14, закрепленное на модуле подвижке 13. Используемая схема интерферометра Майкельсона. Оптический детектор 8 электрически сопряжен с первым синхронным детектором 11. В свою очередь первый генератор 9 электрически сопряжен с пьезовибратором 10 и первым синхронным детектором 11. Второй генератор 16 электрически сопряжен с модулем подвижки 13 и вторым синхронным детектором 18. Система обратной связи 15 электрически сопряжена с первым синхронным детектором 11 или вторым синхронным детектором 18 и блоком управления 17 модуля подвижки 13. Датчики линейного смещения 19 и углового смещения 20 сопряжены с зеркалом опорного плеча 14.
Способ детектирования ближнепольного оптического отклика для сканирующего зондового микроскопа реализуется следующим образом. Производят сближение осциллирующего на частоте Ω (например, 100 кГц.) зондового датчика 1 с образцом 2. После этого фокусируют на острие 4 зондового датчика 1 оптическое излучение от источника излучения 5, в качестве которого можно использовать, например, перестраиваемый ИК СО2 лазер или квантово-каскадный лазер с перестраиваемой длиной волны или лазер видимого или ближнего ИК диапазона или источник ТГц излучения. Длина волны λ этого излучения находится в диапазоне от 0.4 мкм до 500 мкм. Фокусировка оптического излучения осуществляется посредством фокусирующего элемента 6, в качестве которого можно использовать, например, параболическое металлическое зеркало с Au напылением или Ge линзу Измерение ближнепольного оптического отклика первым синхронным детектором 11 осуществляют посредством детектирования сигнала оптического детектора 8 на высшей гармонике осцилляций зондового датчика 1 nΩ, где n - порядок высшей гармоники. Для этого используют интерферометр Майкельсона, в котором модуль подвижки 13 устанавливает зеркало опорного плеча 14 в заданные положения. В качестве модуля подвижки 13 можно использовать пьезокерамическую подвижку с блоком управления. Далее, используя систему обратной связи 15, изменяют положение зеркала опорного плеча 14 посредством модуля подвижки 13 таким образом, чтобы разница фаз ближнепольного оптического отклика и излучения, отраженного от зеркала опорного плеча 14, поддерживалась постоянной.
Существует вариант, в котором на вход системы обратной связи 15 подают сигнал синусоидальной компоненты оптической амплитуды 25, измеренный первым синхронным детектором 11 на частоте nΩ. При этом выходной сигнал системы обратной связи 15 управляет положением зеркала опорного плеча 14 посредством модуля подвижки 13. В результате компенсируется разница между сигналом синусоидальной компоненты оптической амплитуды 25 и близким к нулю значением рабочей точки. Эта величина может быть в диапазоне от -10% до 10% величины максимального значения сигнала синусоидальной компоненты оптической амплитуды 25. При этом регистрируется сигнал положения зеркала опорного плеча 14, который умножают на коэффициент пересчета 4π/λ и получают сигнал фазы оптического отклика 28. После этого при необходимости образец 2 перемещают в новую точку и повторяют описанную выше процедуру в каждой точке сканирования.
Существует вариант, в котором после получения сигнала фазы оптического отклика 28 зеркало опорного плеча 14 смещают при помощи модуля подвижки 13 на заданную величину. Эта величина соответствует сдвигу фазы опорного пучка на детекторе близким к π/2+πk (k - это целое число) и может быть в диапазоне ±π/20. В этом положении регистрируется сигнал полной оптической амплитуды 26, измеренный первым синхронным детектором 11 на частоте nΩ. После этого образец 2 перемещают в новую точку и повторяют описанную выше процедуру в каждой точке сканирования. Существует вариант, в котором при первом сканировании линии по поверхности образца 2 в каждой точке линии регистрируют положение зеркала опорного плеча 14. Затем при повторном сканировании той же линии в каждой точке посредством модуля подвижки 13 обеспечивают сдвиг фазы луча, отраженного от зеркала опорного плеча 14 на величину, близкой к π/2+πk (k - это целое число), относительно зарегистрированного при первом сканировании линии положения зеркала опорного плеча 14 в этой же точке. При этом при повторном сканировании линии первым синхронным детектором 11 регистрируется сигнал полной оптической амплитуды 26 на частоте nΩ. После этого образец 2 перемещают на следующую линию и повторяют описанную выше процедуру для каждой следующей линии сканирования.
Существует вариант, в котором с частотой f модулируют сигнал, управляющий положением зеркала опорного плеча 14 посредством модуля подвижки 13. Частота f может быть в диапазоне 100 Гц до 10 кГц. На вход системе обратной связи подают сигнал синусоидальной компонентой 27 измеренный вторым синхронным детектором 18 на частоте f. При этом на вход второму синхронному детектору 18 подают сигнал синусоидальной компоненты оптической амплитуды 25, измеренный первым синхронным детектором 11 на частоте nΩ. Выходной сигнал системы обратной связи изменяет положение зеркала опорного плеча 14 посредством модуля подвижки 13, компенсируя разницу между сигналом синусоидальной компоненты 27, измеренный вторым синхронным детектором 18 на частоте f, и близким к нулю значением рабочей точки. При этом в процессе сканирования регистрируется сигнал полной оптической амплитуды 26 и положение зеркала опорного плеча 14, которое умножают на коэффициент пересчета 4π/λ и получают сигнал фазы оптического отклика.
Существует вариант, в котором в заданном диапазоне (например, для квантово-каскадного ИК лазера в диапазоне от 9,5 мкм до 12 мкм) изменяют длину волны λ источника излучения 5 и строят зависимость сигнала полной оптической амплитуды 26 от длины волны λ источника излучения 5. При этом в результате получают спектральную зависимость амплитуды ближнепольного оптического отклика от длины волны λ.
Существует вариант, в котором положение зеркала опорного плеча 14 регистрируют посредством датчиков линейного смещения 19. Они могут быть выполнены в виде емкостных датчиков смещения
Существует вариант, в котором угол зеркала опорного плеча 14 поддерживают постоянным при перемещении посредством модуля подвижки 13 с помощью системы обратной связи 15. На ее вход подают значения датчиков углового смещения 20. При этом выходной сигнал управляет углом модуля подвижки 13, компенсируя угловые отклонения при перемещениях.
То, что в способе детектирования ближнепольного оптического отклика для сканирующего зондового микроскопа, используя систему обратной связи 15 изменяют положение зеркала опорного плеча 14 посредством модуля подвижки 13 таким образом, чтобы разница фаз ближнепольного оптического отклика и излучения, отраженного от зеркала опорного плеча 14, поддерживалась постоянной приводит к тому, что увеличивается быстродействие, а также снижается уровень механических шумов и вибрации, создаваемых модулем подвижки 13 зеркала опорного плеча 14 и, соответственно, уменьшается погрешность измерений.
То, что на вход системы обратной связи 15 подают сигнал синусоидальной компоненты оптической амплитуды 25, измеренный первым синхронным детектором 11 на частоте nΩ, а выходной сигнал системы обратной связи 15 управляет положением зеркала опорного плеча 14 посредством модуля подвижки 13, компенсируя разницу между сигналом синусоидальной компоненты оптической амплитуды 25 и близким к нулю значением рабочей точки, при этом регистрируется сигнал положения зеркала опорного плеча 14, который умножают на коэффициент пересчета 4π/λ, и получают сигнал фазы оптического отклика приводит к тому, что увеличивается быстродействие, а также снижается уровень механических шумов и вибрации, создаваемых модулем подвижки 13 зеркала опорного плеча 14 и, соответственно, уменьшается погрешность измерений.
То, что после получения сигнала фазы оптического отклика зеркало опорного плеча 14 смещают при помощи модуля подвижки 13 на заданную величину, соответствующую сдвигу фазы опорного пучка на детекторе близким к π/2+πk, k - это целое число и в этом положении регистрируется сигнал полной оптической амплитуды 26, измеренный первым синхронным детектором 11 на частоте nΩ, а после этого образец 2 перемещают в новую точку и повторяют описанную выше процедуру в каждой точке сканирования приводит к тому, что снижается погрешность измерений.
То, что при первом сканировании линии по поверхности образца 2 в каждой точке линии регистрируют положение зеркала опорного плеча 14, а затем при повторном сканировании той же линии в каждой точке посредством модуля подвижки 13 обеспечивают сдвиг фазы луча, отраженного от зеркала опорного плеча 14 на величину, близкой к π/2+πk, k - это целое число, относительно зарегистрированного при первом сканировании линии положения зеркала опорного плеча 14 в этой же точке, при этом при повторном сканировании линии первым синхронным детектором 11 регистрируется сигнал полной оптической амплитуды 26 на частоте nΩ, после этого образец 2 перемещают на следующую линию и повторяют описанную выше процедуру для каждой следующей линии сканирования приводит к тому, что снижается уровень механических шумов и вибрации, создаваемых модулем подвижки 13 зеркала опорного плеча 14 и, соответственно, уменьшается погрешность измерений.
То, что с частотой f модулируют сигнал, управляющий положением зеркала опорного плеча 14 посредством модуля подвижки 13, и на вход системе обратной связи подают сигнал синусоидальной компонентой 27 измеренный вторым синхронным детектором 18 на частоте f, при этом на вход второму синхронному детектору 18 подают сигнал синусоидальной компоненты оптической амплитуды 25, измеренный первым синхронным детектором 11 на частоте nΩ, и выходной сигнал системы обратной связи изменяет положение зеркала опорного плеча 14 посредством модуля подвижки 13, компенсируя разницу между сигналом синусоидальной компоненты 27, измеренный вторым синхронным детектором 18 на частоте f, и близким к нулю значением рабочей точки, при этом в процессе сканирования регистрируется сигнал полной оптической амплитуды 26 и положение зеркала опорного плеча 14, которое умножают на коэффициент пересчета 4π/λ и получают сигнал фазы оптического отклика приводит к тому, что увеличивается быстродействие, а также снижается уровень механических шумов и вибрации, создаваемых модулем подвижки 13 зеркала опорного плеча 14 и, соответственно, уменьшается погрешность измерений.
То, что в заданном диапазоне изменяют длину волны λ источника излучения 5 и строят зависимость сигнала полной оптической амплитуды 26 от длины волны λ источника излучения 5, при этом в результате получается спектральная зависимость амплитуды ближнепольного оптического отклика от длины волны λ приводит снижению времени измерения, кроме того это это приводит к расширению функциональных возможностей устройства.
То, что положение зеркала опорного плеча 14 регистрируют посредством датчиков линейного смещения 19 приводит к тому, что устраняются нежелательные эффекты модуля подвижки 13, такие как нелинейность, люфт, гистерезис, и таким образом, приводит к уменьшению погрешности измерения сигнала фазы оптического отклика 28 и сигнала полной оптической амплитуды 26.
То, что угол зеркала опорного плеча 14 поддерживают постоянным при перемещении посредством модуля подвижки 13 с помощью системы обратной связи 15, на вход которой подаются значения датчиков углового смещения 20, а выходной сигнал управляет углом модуля подвижки 13, компенсируя угловые отклонения при перемещениях приводит к тому, что снижается погрешность измерения сигнала фазы оптического отклика 28 и сигнала полной оптической амплитуды 26.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ОПТИЧЕСКОЙ СПЕКТРОМЕТРИИ | 2015 |
|
RU2616854C2 |
| Линейный оптический гироскоп | 2024 |
|
RU2827881C1 |
| СПОСОБ ОЦЕНКИ ВИБРАЦИОННЫХ ИЛИ АКУСТИЧЕСКИХ СИГНАЛОВ ВДОЛЬ ПРОТЯЖЕННЫХ ОБЪЕКТОВ НА БАЗЕ ВОЛОКОННО-ОПТИЧЕСКОГО КОГЕРЕНТНОГО РЕФЛЕКТОМЕТРА С АМПЛИТУДНОЙ И ФАЗОВОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩЕГО ИЗЛУЧЕНИЯ | 2016 |
|
RU2624594C1 |
| Способ исследования микрообъектов и ближнепольный оптический микроскоп для его реализации | 2016 |
|
RU2643677C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2009 |
|
RU2494406C2 |
| Сканирующий зондовый микроскоп и контроллер сканирующего зондового микроскопа | 2021 |
|
RU2764379C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАЛЫХ КОЭФФИЦИЕНТОВ ОПТИЧЕСКОГО ПОГЛОЩЕНИЯ НЕЛИНЕЙНО-ОПТИЧЕСКИХ КРИСТАЛЛОВ | 2017 |
|
RU2650713C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ВОСПРИИМЧИВОСТИ ФОТОЭЛЕКТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ В СОСТАВЕ СОЛНЕЧНЫХ БАТАРЕЙ К ОПТИЧЕСКОМУ ИЗЛУЧЕНИЮ | 2013 |
|
RU2565331C2 |
| ПРЕЦИЗИОННЫЙ ТВЕРДОТЕЛЬНЫЙ КВАНТОВЫЙ ГИРОСКОП НЕПРЕРЫВНОГО ДЕЙСТВИЯ НА БАЗЕ СПИНОВОГО АНСАМБЛЯ В АЛМАЗЕ | 2017 |
|
RU2684669C1 |
| Способ определения степени и места возмущения зонной волоконно-оптической системы охраны объектов и устройство для его реализации | 2015 |
|
RU2695415C2 |
Изобретение относится к оптическим методам высокого пространственного разрешения на основе методов зондовой микроскопии. Сущность изобретения заключается в том, что в способе детектирования ближнепольного оптического отклика для сканирующего зондового микроскопа, включающем сближение осциллирующего на частоте Ω зондового датчика с образцом, фокусирование на острие зондового датчика оптического излучения с длиной волны λ в диапазоне от 0.4 до 500 мкм источника излучения посредством фокусирующего элемента, измерение ближнепольного оптического отклика первым синхронным детектором посредством детектирования сигнала оптического детектора на высшей гармонике осцилляций зондового датчика nΩ, где n - порядок высшей гармоники, с использованием схемы интерферометра Майкельсона, в которой модуль подвижки устанавливает зеркало опорного плеча в заданные положения, используя систему обратной связи, изменяют положение зеркала опорного плеча посредством модуля подвижки таким образом, чтобы разница фаз ближнепольного оптического отклика и излучения, отраженного от зеркала опорного плеча, поддерживалась постоянной. Технический результат заключается в снижении времени измерения, увеличении быстродействия, уменьшении шумов при измерении и снижении погрешности измерений ближнепольного отклика образца, а также в расширении функциональных возможностей устройства. 7 з.п. ф-лы, 4 ил.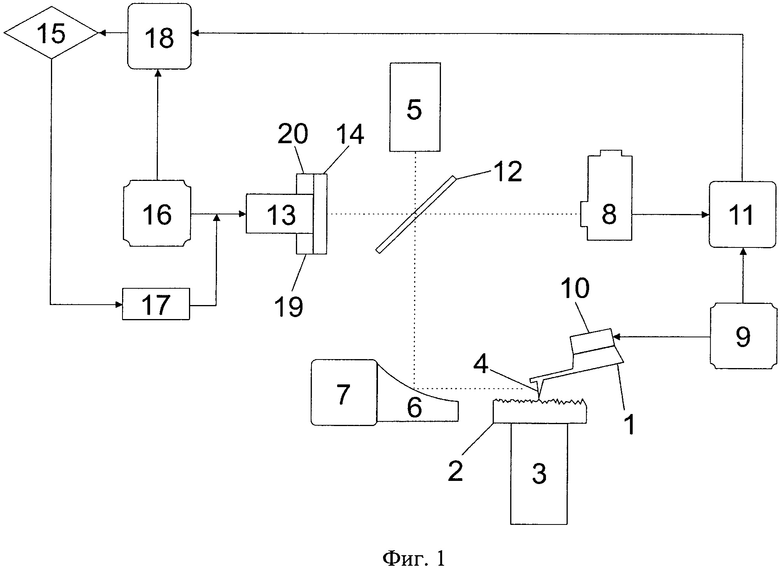
1. Способ детектирования ближнепольного оптического отклика для сканирующего зондового микроскопа, включающий сближение осциллирующего на частоте Ω зондового датчика (1) с образцом (2), фокусирование на острие (4) зондового датчика (1) оптического излучения с длиной волны λ в диапазоне от 0.4 до 500 мкм источника излучения (5) посредством фокусирующего элемента (6), измерение ближнепольного оптического отклика первым синхронным детектором (11) посредством детектирования сигнала оптического детектора (8) на высшей гармонике осцилляций зондового датчика (1) nΩ, где n - порядок высшей гармоники, с использованием схемы интерферометра Майкельсона, в которой модуль подвижки (13) устанавливает зеркало опорного плеча (14) в заданные положения, отличающийся тем, что используя систему обратной связи (15) изменяют положение зеркала опорного плеча (14) посредством модуля подвижки (13) таким образом, чтобы разница фаз ближнепольного оптического отклика и излучения, отраженного от зеркала опорного плеча (14), поддерживалась постоянной.
2. Способ по п. 1, отличающийся тем, что на вход системы обратной связи (15) подают сигнал синусоидальной компоненты оптической амплитуды (25), измеренный первым синхронным детектором (11) на частоте nΩ, а выходной сигнал системы обратной связи (15) управляет положением зеркала опорного плеча (14) посредством модуля подвижки (13), компенсируя разницу между сигналом синусоидальной компоненты оптической амплитуды (25) и близким к нулю значением рабочей точки, при этом регистрируется сигнал положения зеркала опорного плеча (14), который умножают на коэффициент пересчета 4π/λ и получают сигнал фазы оптического отклика (28).
3. Способ по п. 2, отличающийся тем, что после получения сигнала фазы оптического отклика (28) зеркало опорного плеча (14) смещают при помощи модуля подвижки (13) на заданную величину, соответствующую сдвигу фазы опорного пучка на детекторе, близкую к π/2+πk, и в этом положении регистрируется сигнал полной оптической амплитуды (26), измеренный первым синхронным детектором (11) на частоте nΩ, а после этого образец (2) перемещают в новую точку и повторяют описанную выше процедуру в каждой точке сканирования.
4. Способ по п. 2, отличающийся тем, что при первом сканировании линии по поверхности образца (2) в каждой точке линии регистрируют положение зеркала опорного плеча (14), а затем при повторном сканировании той же линии в каждой точке посредством модуля подвижки (13) обеспечивают сдвиг фазы луча, отраженного от зеркала опорного плеча, (14) на величину, близкую к π/2+πk (k - это целое число), относительно зарегистрированного при первом сканировании линии положения зеркала опорного плеча (14) в этой же точке, при этом при повторном сканировании линии первым синхронным детектором (11) регистрируется сигнал полной оптической амплитуды (26) на частоте nΩ, после этого образец (2) перемещают на следующую линию и повторяют описанную выше процедуру для каждой следующей линии сканирования.
5. Способ по п. 1, отличающийся тем, что с частотой f модулируют сигнал, управляющий положением зеркала опорного плеча (14) посредством модуля подвижки (13), и на вход системе обратной связи подают сигнал синусоидальной компонентой (27), измеренный вторым синхронным детектором (18) на частоте f, при этом на вход второму синхронному детектору (18) подают сигнал синусоидальной компоненты оптической амплитуды (25), измеренный первым синхронным детектором (11) на частоте nΩ, и выходной сигнал системы обратной связи изменяет положение зеркала опорного плеча (14) посредством модуля подвижки (13), компенсируя разницу между сигналом синусоидальной компоненты (27), измеренным вторым синхронным детектором (18) на частоте f, и близким к нулю значением рабочей точки, при этом в процессе сканирования регистрируется сигнал полной оптической амплитуды (26) и положение зеркала опорного плеча (14), которое умножают на коэффициент пересчета 4π/λ и получают сигнал фазы оптического отклика (28).
6. Способ по п. 5, отличающийся тем, что в заданном диапазоне изменяют длину волны λ источника излучения (5) и строят зависимость сигнала полной оптической амплитуды (26) от длины волны λ источника излучения (5), при этом в результате получают спектральную зависимость амплитуды ближнепольного оптического отклика от длины волны λ.
7. Способ по п. 1, отличающийся тем, что положение зеркала опорного плеча (14) регистрируют посредством датчиков линейного смещения (19).
8. Способ по п. 1, отличающийся тем, что угол зеркала опорного плеча (14) поддерживают постоянным при перемещении посредством модуля подвижки (13) с помощью системы обратной связи (15), на вход которой подаются значения датчиков углового смещения (20), а выходной сигнал управляет углом модуля подвижки (13), компенсируя угловые отклонения при перемещениях.
| US 2010115673 A1, 06.05.2010 | |||
| US 7498564 B2, 03.03.2009 | |||
| US 6229609 B1, 08.05.2001. |

