Изобретение относится к области лазерных информационно-измерительных систем и может использоваться как первичный датчик для определения величины и направления скорости кругового и/или скорости поступательного движения в системах навигации, контроля движения, а также как инструмент в научных исследованиях.
Использование эффекта Саньяка для измерения угловой скорости вращения Земли с помощью кольцевого интерферометра впервые было выполнено А. Майкельсоном и Д. Гейль [Astrophys. J., 61,140,1925]. Это положило начало оптической навигационной гироскопии, с помощью которой по измерению угловой скорости вращения Земли определяют географическую широту места.
Реальные перспективы у оптической гироскопии появились после создания в 60-х годах первых лазеров. В 1962 году А. Розенталь [J.Opt.Soc.Amer., 52, №10, р.1143, 1962] предложил, а В. Мацек и Д. Дэвис [Physics Letters, 2, №. 3, p. 67, 1963] реализовали первый He-Ne-ый лазерный гироскоп, а с появлением оптических световодов с низкими потерями В. Вали и Р. Шорхилл [Appl.Opt., 15, №.3, р.1099, 1976] создали первый волоконно-оптический гироскоп. Измеряемым сигналом в первом случае является частота биений, а во втором случае используется разность фаз встречных волн. В обоих случаях определяется угловая скорость вращения объекта. Чувствительность гироскопа тем выше, чем больше площадь контура, обегаемого встречными волнами.
В настоящее время оптические гироскопы обоих типов, лазерные и волоконно-оптические, широко используются в навигации, системах контроля движением и во многих других смежных областях. Однако в настоящее время это сложные, дорогостоящие, недостаточно универсальные для широкого применения и крупногабаритные устройства.
Техническая задача, решаемая в рамках настоящего изобретения, заключается в расширении арсенала средств оптической гироскопии, навигации и ориентации.
Технический результат заключается в расширении арсенала оптических гироскопов.
Технический результат достигается тем, что линейный оптический гироскоп, включает установленные на платформе с опорно-поворотным устройством оптический интерферометр, лазерный диод, фотоприемник, блок управления и обработки сигналов, причем оптический интерферометр состоит из последовательно расположенных оптического изолятора, коллиматора, первого полупрозрачного зеркала, сканирующего оптического дефлектора, коллимирующей линзы, призмы полного внутреннего отражения и второго полупрозрачного зеркала, образующих его первое плечо, последовательно расположенных первого поворотного зеркала и второго поворотного зеркала с пьезоприводом, образующих его второе плечо, а блок управления и обработки сигналов состоит из аналогового модуля, цифрового вычислительного устройства, при этом аналоговый модуль включает драйверы приводов опорно-поворотного устройства, генератор гармонических сигналов, предназначенный для генерирования сигналов на основной частоте, второй и третьей гармониках с целью управления сканирующим оптическим дефлектором и выделения составляющих фототока на основной частоте, удвоенной и утроенной частотах сканирования, первый синхронный детектор, предназначенный для выделения из фототока составляющей на частоте сканирования, второй синхронный детектор, предназначенный для выделения составляющей на удвоенной частоте, и третий синхронный детектор, предназначенный для выделения составляющей на утроенной частоте, цифровое вычислительное устройство, предназначенное для управления перемещением зеркала с пьезоприводом и интерферометра по азимуту и углу места, определения линейной скорости кругового, поступательного движения и ее направления, при этом опорно-поворотное устройство включает электроприводы и датчики углов поворота и предназначено для обеспечения угла поворота платформы по азимуту и углу места.
При этом возможно, что сканирующий оптический дефлектор выполнен в виде электрооптического устройства.
При этом возможно, что сканирующий оптический дефлектор выполнен в виде акустооптического устройства.
При этом возможно, что лазерный диод выполнен в виде одночастотного лазерного диода.
При этом возможно, что поворотные зеркала представляют собой диэлектрические зеркала.
При этом возможно, что поворотные зеркала выполнены с металлическим напылением.
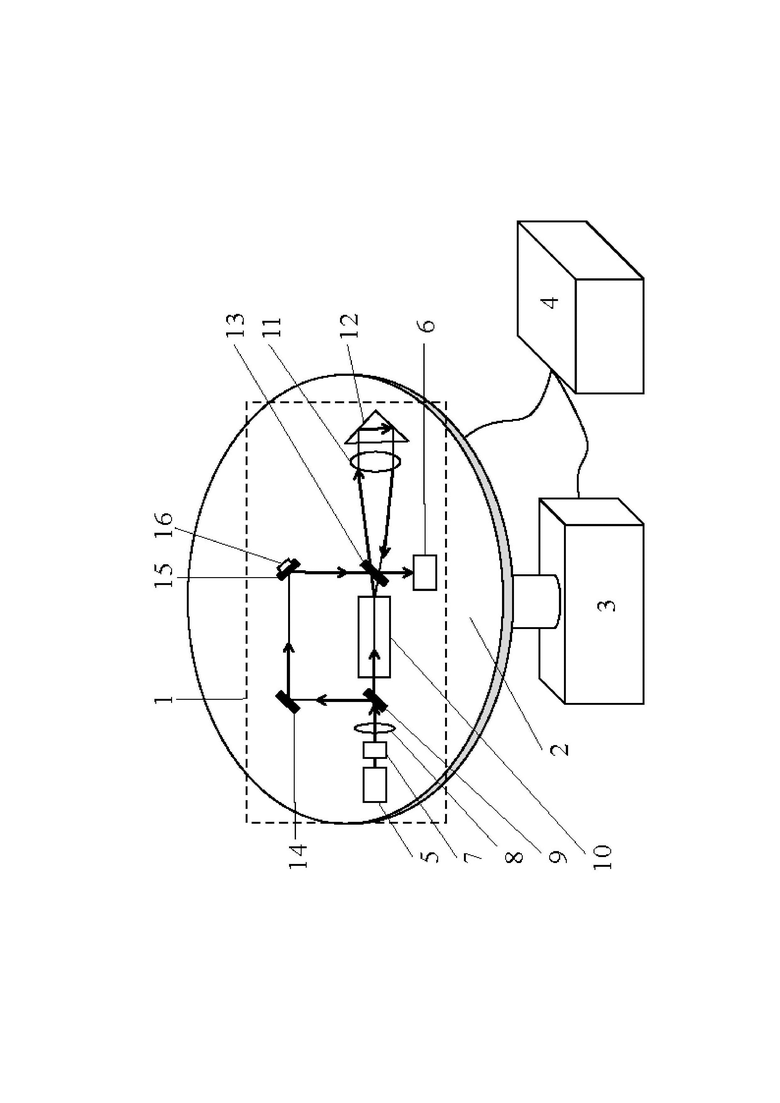
Изобретение поясняется чертежом, на котором показана схема предлагаемого линейного оптического гироскопа.
Предлагаемый линейный лазерный гироскоп включает оптический интерферометр 1, расположенный на платформе 2 с опорно-поворотным устройством 3, блок управления и обработки сигналов 4, лазерный диод 5, фотоприемник 6.
В состав интерферометра 1 входят последовательно расположенные оптический изолятор 7, коллиматор 8, первое полупрозрачное зеркало 9, сканирующий оптический дефлектор 10, коллимирующая линза 11, призма полного внутреннего отражения 12 и второе полупрозрачное зеркало 13, образующие его первое плечо, и последовательно расположенные первое поворотное зеркало 14, второе поворотное зеркало 15 с пьезоприводом 16, образующие его второе плечо.
Лазерный диод 5 представляет собой одночастотный полупроводниковый лазер с длиной волны излучения в диапазоне 0,8-1,6 мкм.
Уровень изоляции оптического изолятора 7 составляет не менее 60 дБ.
Сканирующий оптический дефлектор 10 представляет собой электрооптический кристалл длиной 5-7 мм с линейной апертурой 2 мм. Ширина сектора сканирования 2α0 составляет 0,2 радиан, частота сканирования не менее 100 кГц.
Коллимирующая линза 11 удалена от оптического дефлектора 9 на 20 мм, ее фокусное расстояние составляет 20 мм.
Первое и второе полупрозрачные зеркала 9 и 13 представляют собой делительные зеркала, предназначенные для сбивания двух волн перед фотоприемником 6.
Фотоприемник 6 выполнен на основе полупроводникового фотодиода с усилителем и спектральной чувствительностью, соответствующей длине волны лазерного диода 5. Постоянная времени фотоприемника 6 составляет не менее 10-9 сек.
Платформа 2 имеет округлую форму.
Опорно-поворотное устройство 3 предназначено для обеспечения угла поворота платформы 2 по азимуту и углу места. Угол поворота по азимуту составляет от 0° до 180°, угол поворота по углу места составляет от минус 90° до плюс 90°. Опорно-поворотное устройство 3 включает электроприводы и датчики углов поворота.
Блок управления и обработки сигналов 4 состоит из аналогового модуля, цифрового вычислительного устройства, АЦП и ЦАП.
Аналоговый модуль включает драйверы приводов опорно-поворотного устройства 3, генератор гармонических сигналов, первый, второй и третий синхронные детекторы.
Генератор гармонических сигналов предназначен для генерирования сигналов на основной частоте, на второй и третьей гармониках, используемых для управления оптическим дефлектором 10 и выделения составляющих фототока на этих частотах.
Первый синхронный детектор предназначен для выделения из фототока составляющей на частоте сканирования, второй синхронный детектор предназначен для выделения составляющей на удвоенной частоте, а третий синхронный детектор предназначен для выделения составляющей на утроенной частоте.
Цифровое вычислительное устройство выполнено в виде ЭВМ и предназначено для обеспечения максимальной чувствительности интерференции и независимость результата интерференции от внешних воздействий, управления приводами опорно-поворотного устройства 3 с целью перемещения интерферометра 1 в пространстве в задаваемом диапазоне по азимуту и углу места, определения параметров движения, а именно, величины линейной скорости кругового и/или поступательного движения и его направления.
АЦП предназначен для оцифровки сигналов с выходов синхронных детекторов и датчиков углов поворота в составе опорно-поворотного устройства 3.
ЦАП предназначен для преобразования сигналов, направляемых от цифрового вычислительного устройства к сканирующему оптическому дефлектору 10, приводам опорно-поворотного устройства 3 и пьезоприводу 16 поворотного зеркала 15.
Предложенный линейный оптический гироскоп работает следующим образом. Эффект Саньяка, как недавно было экспериментально показано Р. Вангом и др. [Phys. Rev. Lett. 93, 143901, 2004], возникает также при распространении света в одном направлении по незамкнутой трассе, причем не только при вращении трассы, но и при ее поступательном движении. Возникающий сигнал как приращение фазы пробегающей волны определяется произведением скорости движения V и проекции длины трассы пробега света L на направление движения.
При пробеге по трассе на объекте, находящемся в круговом или поступательном движении относительно инерциальной системы отсчета, возникает линейный эффект Саньяка. В качестве такой системы отсчета выступает геоцентрическая система отсчета. Величина фазового набега в результате проявления данного эффекта определяется как [Phys. Rev. Lett. 93, 143901, 2004]:
 , (1)
, (1)
где L –длина трассы, V – линейная скорость поступательного или кругового движения объекта и  – угол между вектором скорости V и направлением распространения света.
– угол между вектором скорости V и направлением распространения света.
Излучение лазерного диода 5 попадает на первое полупрозрачное зеркало 9 и разделяется на первую и вторую волны. Сканирующий оптический дефлектор 10 осуществляет сканирование пробегающей через него первой волны по синусоидальному закону, в соответствии с которым угол отклонения луча от оси сектора сканирования изменяется по закону  , где
, где  и
и  – угловая частота и амплитуда сканирования, соответственно.
– угловая частота и амплитуда сканирования, соответственно.
Так как фокальная плоскость коллимирующей линзы 11 совмещена с плоскостью выходного окна сканирующего оптического дефлектора 10, то независимо от угла распространения первая волна попадает на входную плоскость призмы полного внутреннего отражения 12 под нормальным углом. Проходя через призму, эта волна зеркально смещается относительно осевой линии, возвращается к коллимирующей линзе 11, проходит через нее в обратном направлении и направляется точно в ту же точку на сканирующем оптическом дефлекторе 10, откуда она только что вышла, падает на второе полупрозрачное зеркало 13, установленное вблизи сканирующего оптического дефлектора 10, и половина ее перенаправляется к фотоприемнику 15.
Таким образом, сделав пробег в направлении от сканирующего оптического дефлектора 9 к призме полного внутреннего отражения 12 и обратно, первая волна независимо от величины угла  , попадает всегда в одну и ту же точку, а именно на входное окно фотоприемника 6. Точно туда же прибегает вторая волна. Здесь обе волны смешиваются и интерферируют.
, попадает всегда в одну и ту же точку, а именно на входное окно фотоприемника 6. Точно туда же прибегает вторая волна. Здесь обе волны смешиваются и интерферируют.
Комплексные амплитуды электрического поля двух волн перед фотоприемником 6 записываются следующим образом:
 ],
],
 ], (2)
], (2)
где  – амплитуда волн,
– амплитуда волн,  – угловая частота света,
– угловая частота света,  – фаза, набираемая при пробеге сканирующей волны в прямом и обратном направлениях между сканирующим оптическим дефлектором 10 и призмой полного внутреннего отражения 12, расстояние между которыми L,
– фаза, набираемая при пробеге сканирующей волны в прямом и обратном направлениях между сканирующим оптическим дефлектором 10 и призмой полного внутреннего отражения 12, расстояние между которыми L,  и
и  – фазы, возникающие при пробеге двух волн по неподвижным участкам плеч интерферометра 1 и учитывающие возможные флуктуации, например из-за нестабильностей внешних факторов, и
– фазы, возникающие при пробеге двух волн по неподвижным участкам плеч интерферометра 1 и учитывающие возможные флуктуации, например из-за нестабильностей внешних факторов, и  – фаза, вносимая микроперемещениями зеркала 15, создаваемыми пьезоприводом 16.
– фаза, вносимая микроперемещениями зеркала 15, создаваемыми пьезоприводом 16.
Фаза  является суммой двух фаз:
является суммой двух фаз:
 , (3)
, (3)
где  – фаза, определяемая изменением длины пути пробега первой волны в результате сканирования:
– фаза, определяемая изменением длины пути пробега первой волны в результате сканирования:
 (4)
(4)
и  – фаза, являющиеся результатом линейного эффекта Саньяка:
– фаза, являющиеся результатом линейного эффекта Саньяка:
 ,(5)
,(5)
где  – угол между направлением скорости V и направлением оси сектора сканирования.
– угол между направлением скорости V и направлением оси сектора сканирования.
Интенсивность электрического поля интерферирующих волн определяется квадратом модуля суммы электрических полей этих волн. Интенсивность поля преобразуется в фототок, который состоит из постоянной и переменной составляющих; последняя записывается как:
 , (6)
, (6)
где  – чувствительность фотоприемника,
– чувствительность фотоприемника,  и
и  -
- .
.
Для удобства фототок (6) представляется как
 , (7)
, (7)
где
 y=
y= , z=
, z= . (8)
. (8)
Из выражений (7) и (8) следует, что переменная часть фототока определяется параметрами x, y и z, которые сами в свою очередь являются функциями линейной скорости кругового и/или поступательного движения V (далее просто скорости V) и угла , а также параметров предлагаемого линейного оптического гироскопа. Численные значения данных параметров при расстоянии между сканирующим оптическим дефлектором 10 и призмой полного внутреннего отражения 12 равном L=2 см, длине волны излучения  мкм, амплитуде сканирования
мкм, амплитуде сканирования  =0,1 рад и скорости V=300 м/с следующие: x≈
=0,1 рад и скорости V=300 м/с следующие: x≈ , z ≈
, z ≈  и y
и y .
.
В дальнейшем фототок (7) представляется в виде ряда составляющих фототока. Используется тождество Якоби-Ангера, позволяющее разложить тригонометрические функции, аргументами которых являются также тригонометрические функции, в ряд по гармоническим функциям с частотами, кратными частоте сканирования , и амплитудами, определяющимися функциями Бесселя первого рода  где n – порядок функций, а аргумент р принимает значения x, y, z.
где n – порядок функций, а аргумент р принимает значения x, y, z.
В полученном выражении остается три составляющие (гармоники) фототока, определяющие механизм обработки сигнала в предлагаемом оптическом линейном гироскопе:
 (9)
(9)
Выделение трех данных составляющих из фототока (7) и определение их амплитуд осуществляется с помощью первого, второго и третьего синхронных детекторов. Амплитуды составляющих с помощью АЦП оцифровываются и направляются в цифровое вычислительное устройство.
Для определения скорости V и угла настраивают режим работы интерферометра 1. Как известно, максимальная чувствительность двулучевых интерферометров, таких как, например, интерферометры Маха-Цендера или Саньяка, характерна для режима, при котором рабочая точка смещается на середину линейного участка передаточной функции интерферометра 1, принимая значение  .
.
Обеспечение оптимальных и стабильных условий интерференции осуществляется путем удержания на определенном уровне выходных сигналов синхронных детекторов на удвоенной и утроенной частотах за счет микроперемещений зеркала 15 с пьезоприводом 16 и управления амплитудой сканирования. Определение параметров движения осуществляют по выходному сигналу синхронного детектора на основной частоте и показаниям датчиков углов поворота опорно-поворотного устройства 3.
Интерферометр 1 работает в оптимальном режиме при максимальной амплитуде первой гармоники, когда, согласно (9),  (y=) и величина функции Бесселя нулевого порядка
(y=) и величина функции Бесселя нулевого порядка  максимальна и стабильна.
максимальна и стабильна.
Первое условие выполняется, когда амплитуда второй гармоники удерживается на нулевом (минимальном) уровне. В предлагаемом оптическом линейном гироскопе это реализуется с помощью цифрового вычислительного устройства и известного из уровня техники алгоритма обработки сигналов, реализующего автоматическое регулирование по принципу замкнутого контура регулирования. При этом параметром регулирования является фаза , создаваемая микроперемещениями зеркала 15 с пьезоприводом 16.
Для выполнения второго условия используют цифровое вычислительное устройство и алгоритм, поддерживающий нулевой уровень амплитуды третьей гармоники фототока на участке ее спада за счет управления амплитудой сканирования . Это возможно благодаря тому, что осциллирующие функции Бесселя и  при больших значениях z аппроксимируются выражением
при больших значениях z аппроксимируются выражением  , а, следовательно, эти функции сдвинуты друг относительно друга на четверть периода, причем максимальное значение возникает в точке z, где
, а, следовательно, эти функции сдвинуты друг относительно друга на четверть периода, причем максимальное значение возникает в точке z, где  .
.
Так как функция Бесселя первого порядка  при малых значениях x линейная, то сигнал (напряжение) на выходе первого синхронного детектора в квадратурном режиме пропорционален скорости V, амплитуде сканирования , расстоянию L между оптическим дефлектором 10 и призмой полного внутреннего отражения 12, а также зависит от угла :
при малых значениях x линейная, то сигнал (напряжение) на выходе первого синхронного детектора в квадратурном режиме пропорционален скорости V, амплитуде сканирования , расстоянию L между оптическим дефлектором 10 и призмой полного внутреннего отражения 12, а также зависит от угла :
 , (10)
, (10)
Из (10) следует, что напряжение U принимает максимальное значение при , то есть когда угол между осью сектора сканирования и направлением скорости V составляет 90°, минимальное значение напряжение U принимает, когда данный угол составляет 90°, нулевое значение напряжение U принимает, когда угол равен 0° и 180°.
принимает максимальное значение при , то есть когда угол между осью сектора сканирования и направлением скорости V составляет 90°, минимальное значение напряжение U принимает, когда данный угол составляет 90°, нулевое значение напряжение U принимает, когда угол равен 0° и 180°.
Таким образом, определение искомых скорости V и угла сводится к поиску положения интерферометра 1 в пространстве, когда напряжение на выходе первого синхронного детектора принимает экстремальное значение, либо максимальное (положительное), либо минимальное (отрицательное).
Поиск этого положения осуществляется путем регистрации напряжения U на выходе первого синхронного детектора, измеряющего амплитуду составляющей фототока на частоте сканирования, при управляемом перемещении интерферометра 1 в пространстве в задаваемом диапазоне по азимуту и углу места.
Экстремальное значение распределения U фиксируется как  и используется для определения величины линейной скорости V:
и используется для определения величины линейной скорости V:
 , (11)
, (11)
где М – масштабный коэффициент.
При этом в случае положительного значения направление скорости V определяется углом 90°, отсчитываемым от оси сектора сканирования против часовой стрелки в сторону призмы полного внутреннего отражения 12, а в случае отрицательного значения определяется углом 90°, отсчитываемым от оси сектора сканирования по часовой стрелке в сторону призмы полного внутреннего отражения 12.
Масштабный коэффициент определяют путем калибровки. Так как предложенный линейный оптический гироскоп может реагировать одновременно на скорость кругового и поступательного движения, то калибровку проводят, исключив движение одного из этих типов. Это возможно, если априори известен характер исследуемых движений и поэтому предлагаемый гироскоп можно ориентировать таким образом, чтобы он реагировал на скорость только кругового движения или только поступательного.
Например, для калибровки используют суточное вращение Земли, ориентируя предлагаемый гироскоп таким образом, чтобы ось сектора сканирования была перпендикулярна направлению поступательного движения, в случае если оно есть, находилась в плоскости местного горизонта, совпадала с движением Земли в направлении «Запад → Восток». В таком положении фиксируют напряжение на выходе первого синхронного детектора как  и с его помощью определяют масштабный коэффициент следующим образом:
и с его помощью определяют масштабный коэффициент следующим образом:
 , (12)
, (12)
где  =
= [м/с],
[м/с],  = 462 м/с – средняя линейная скорость кругового движения Земли на экваторе и
= 462 м/с – средняя линейная скорость кругового движения Земли на экваторе и  – географическая широта места калибровки.
– географическая широта места калибровки.
Оптические гироскопы, основанные на линейном эффекте Саньяка, имеют потенциальное применение в навигации и технике. Они могут использоваться в навигационных системах разного уровня и назначения, в том числе в устройствах для измерения скорости летательных аппаратов, то есть там же, где используются лазерные и волоконно-оптические гироскопы. Также они могут использоваться в исследованиях, связанных с проблемами фундаментальной физики, а именно в экспериментах, подтверждающих или опровергающих движение Земли в некой предпочтительной инерциальной системе отсчета.
Таким образом, предложенный линейный оптический гироскоп может иметь важное значение для повышения технико-экономических характеристик известных оптических гироскопов и расширения области их применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИФФЕРЕНЦИАЛЬНЫЙ МНОГОМОДОВЫЙ ВОЛОКОННЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2020 |
|
RU2751052C1 |
| Кольцевой волоконно-оптический интерферометр | 1985 |
|
SU1322084A1 |
| МНОГОМОДОВЫЙ ВОЛОКОННЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2018 |
|
RU2708700C2 |
| ТВЕРДОТЕЛЬНЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2009 |
|
RU2421689C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СПЕКТРАЛЬНЫХ ХАРАКТЕРИСТИК ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2009 |
|
RU2408853C1 |
| Измеритель длин волн | 1987 |
|
SU1441189A1 |
| Способ формирования изображения удаленного малоразмерного объекта | 1990 |
|
SU1764011A1 |
| ПОЛУПРОВОДНИКОВЫЙ ЛАЗЕРНЫЙ ГИРОСКОП (ВАРИАНТЫ) | 2010 |
|
RU2451906C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ КВАНТОВЫЙ КОМПЬЮТЕР (ВАРИАНТЫ) | 2023 |
|
RU2813708C1 |
| Способ контроля диаметра нитевидных изделий | 1990 |
|
SU1779920A1 |
Изобретение относится к области лазерных информационно-измерительных систем и может использоваться как первичный датчик для определения величины и направления скорости кругового и/или скорости поступательного движения в системах навигации, контроля движения. Предложенный гироскоп состоит из интерферометра Саньяка, расположенного на платформе с поворотным устройством по азимуту и углу места, блока управления и обработки результатов измерения. Одно плечо интерферометра включает оптический дефлектор и призму полного внутреннего отражения, второе плечо интерферометра включает зеркало с пьезоприводом. Сигнал, несущий информацию о линейной скорости движения и ее направлении, возникает при интерференции двух волн. Определение параметров движения осуществляют путем цифровой обработки сигнала интерференции на частоте сканирования, удвоенной и утроенной частотах. Сигналы на удвоенной и утроенной частотах, зеркало с пьезоприводом используют для обеспечения условий работы интерферометра в квадратурном режиме, а сигнал на основной частоте используют для определения параметров движения. Технический результат – расширение арсенала оптических гироскопов. 5 з.п. ф-лы, 1 ил.
1. Линейный оптический гироскоп, включающий установленные на платформе с опорно-поворотным устройством оптический интерферометр, лазерный диод, фотоприемник, блок управления и обработки сигналов, причем оптический интерферометр состоит из последовательно расположенных оптического изолятора, коллиматора, первого полупрозрачного зеркала, сканирующего оптического дефлектора, коллимирующей линзы, призмы полного внутреннего отражения и второго полупрозрачного зеркала, образующих его первое плечо, последовательно расположенных первого поворотного зеркала и второго поворотного зеркала с пьезоприводом, образующих его второе плечо, а блок управления и обработки сигналов состоит из аналогового модуля, цифрового вычислительного устройства, при этом аналоговый модуль включает драйверы приводов опорно-поворотного устройства, генератор гармонических сигналов, предназначенный для генерирования сигналов на основной частоте, второй и третьей гармониках с целью управления сканирующим оптическим дефлектором и выделения составляющих фототока на основной частоте, удвоенной и утроенной частотах сканирования, первый синхронный детектор, предназначенный для выделения из фототока составляющей на частоте сканирования, второй синхронный детектор, предназначенный для выделения составляющей на удвоенной частоте, и третий синхронный детектор, предназначенный для выделения составляющей на утроенной частоте, цифровое вычислительное устройство, предназначенное для управления перемещением зеркала с пьезоприводом и интерферометра по азимуту и углу места, определения линейной скорости кругового, поступательного движения и ее направления, при этом опорно-поворотное устройство включает электроприводы и датчики углов поворота и предназначено для обеспечения угла поворота платформы по азимуту и углу места.
2. Гироскоп по п.1, отличающийся тем, что сканирующий оптический дефлектор выполнен в виде электрооптического устройства.
3. Гироскоп по п.1, отличающийся тем, что сканирующий оптический дефлектор выполнен в виде акустооптического устройства.
4. Гироскоп по п.1, отличающийся тем, что лазерный диод выполнен в виде одночастотного лазерного диода.
5. Гироскоп по п.1, отличающийся тем, что поворотные зеркала представляют собой диэлектрические зеркала.
6. Гироскоп по п.1, отличающийся тем, что поворотные зеркала выполнены с металлическим напылением.
| ЛАЗЕРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ С ОБЪЕМНОЙ ФУРЬЕ-ГОЛОГРАММОЙ | 2013 |
|
RU2539755C2 |
| ЛАЗЕРНЫЙ ГИРОСКОП С КОМПЕНСАЦИЕЙ СОСТАВЛЯЮЩЕЙ, ВНОСИМОЙ ВИБРОПОДСТАВКОЙ | 2015 |
|
RU2613043C1 |
| US 8233151 B2, 31.07.2012 | |||
| Способ макроскопической паноптической визуализации очагов повреждения и расчета объема поврежденного миокарда при моделировании ушиба сердца | 2023 |
|
RU2799815C1 |
| US 20040246487 A1, 09.12.2004. | |||

