Область техники, к которой относится изобретение
Изобретение относится к области радиолокации и может быть использовано для оценки характеристик рассеяния электромагнитных волн объектом, для распознавания различий в данных характеристиках между объектами, движущимися с различными скоростями, обнаружения, оценки координат и распознавания объектов.
Уровень техники
Известен способ измерения поляризационной матрицы рассеяния объекта (ПМР), заключающийся в том, что одновременно излучают на ортогональных поляризациях одинаковые по структуре радиосигналы на разных несущих частотах, принимают соответствующие излученным ортогонально поляризованные составляющие отраженных от объекта радиосигналов, одинаковые по поляризации составляющие отраженных радиосигналов, принятые каждым приемным каналом, разделяют за счет использования фильтров, настроенных на частоты, соответствующие частотам излученных радиосигналов, измеряют амплитуды и фазы каждой из выделенных ортогонально поляризованных составляющих отраженных радиосигналов и получают совокупность результатов измерений, которая определяет измеренное значение ПМР объекта [1, 2, 3].
Здесь и далее полагается, что структура радиосигнала определяется видом и параметрами его модуляции, т. е. следует понимать, что одинаковые по структуре радиосигналы имеют одинаковые параметры заданного вида модуляции.
Недостатком данного способа является методическая погрешность измерения элементов ПМР, вызванная в два раза большим диапазоном частот (для частотного разделения радиосигналов). Это объясняется тем, что ортогональные по поляризации радиосигналы излучаются на различных частотах, при этом известно [1, 2, 3], что ПМР объектов существенно зависят от частоты. Покажем это на конкретном примере.
Известно, что нормированная диаграмма обратного вторичного излучения объекта, состоящего из двух "блестящих точек", определяется формулой:
 , (1)
, (1)
где L - расстояние между точками, θ - угол между направлением на источник излучения и нормалью к линии, соединяющей "блестящие точки".
Расчеты по этой формуле показывают, что при расстоянии между "блестящими точками", равном 15 м, ошибка в измерении амплитуды отраженного радиосигнала за счет разности между частотами облучения f1=3 ГГц и f2=3,003 ГГц может достигать (в зависимости от угла θ) 100% от измеряемой величины. Аналогично можно показать, что ошибки измерения фаз элементов ПМР на разных частотах также определяются методом измерения при прочих равных условиях.
Наиболее близким к предлагаемому известным техническим решением, выбранным в качестве прототипа, является способ измерения ПМР объекта [4], заключающийся в том, что в каждом периоде зондирования излучают последовательно два сдвинутых во времени ортогональных по структуре радиосигнала на соответствующих ортогональных поляризациях на одной несущей частоте, принимают все ортогонально поляризованные составляющие отраженных от объекта радиосигналов, выходные радиосигналы каждого соответствующего по поляризации канала приемника подают на входы двух корреляторов, в качестве опорных напряжений, на которые подают соответствующие излученным ортогональные по структуре радиосигналы, задержанные относительно излученных на время задержки отраженных радиосигналов, измеряют параметры выходного радиосигнала каждого коррелятора, определяющие соответствующий элемент ПМР объекта, и получают совокупность результатов измерений, которая определяет ее измеренное значение.
Недостатком данного способа является низкая точность измерения элементов ПМР в результате отличия отражающих характеристик объекта при последовательном его облучении, так как за интервал времени между излучением первого и второго радиосигналов ориентация и положение объекта в пространстве изменятся. Исключением являются только объекты сферической формы. При последовательном во времени способе измерения ПМР объектов несферической формы, амплитуды и фазы ортогональных по поляризации составляющих отраженных радиосигналов, соответствующие элементам одного столбца этой матрицы, будут измерены в один момент времени, а амплитуды и фазы ортогональных по поляризации составляющих отраженных радиосигналов, соответствующие элементам другого - в другой. Поскольку отражающая способность объекта изменяется за время между измерениями, то величины ошибок измерений в первом приближении будут пропорциональны интервалу времени, необходимому для осуществления измерений всех элементов ПМР, т.е. величине сдвига сигналов во времени относительно друг друга, и скорости изменения отражающей способности объекта.
Известно устройство измерения ПМР объекта, включающее двухканальную по поляризации антенну, два переключателя прием-передача (ППП), два передатчика, работающих на достаточно близких частотах, два генератора высокочастотных колебаний (ГВЧК), четыре частотных фильтра (ЧФ), четыре смесителя, четыре согласованных фильтра - СФ и четыре амплитудных детектора (АД), два блока измерения разности фаз (БИФ), три сумматора и синхронизатор, причем выход синхронизатора подключен ко входам передатчиков, выходы которых через ППП подключены к соответствующим входам двухканальной по поляризации антенны, второй выход одного ППП подключен ко входам первого и третьего ЧФ, а другого ППП - ко входам второго и четвертого ЧФ, выход первого ЧФ через последовательно соединенные первый смеситель и первый СФ подключен к первому АД, выход второго ЧФ через второй смеситель и второй СФ подключен ко второму АД, выход третьего ЧФ через третий смеситель и третий СФ подключен к третьему АД, выход четвертого ЧФ через четвертый смеситель и четвертый СФ подключен к четвертому АД, выход первого ГВЧК подключен ко входам первого и второго смесителей, а выход второго ГВЧК подключен ко входам третьего и четвертого смесителей, выходы первого и второго СФ подключены к соответствующим входам первого БИФ, а выходы третьего и четвертого СФ подключены ко входам второго БИФ, выходы первого и второго АД подключены через первый сумматор, а выходы третьего и четвертого АД - через второй сумматор подключены ко входам третьего сумматора, выходы первого и второго БИФ, АД четырех приемных каналов и третьего сумматора являются выходами устройства [2, 3]. Известное устройство реализует способ одновременного измерения на разных частотах ПМР с относительной фазой.
Недостатком этого устройства является низкая точность измерения ПМР объектов, т.к. амплитуды и фазы ортогонально поляризованных компонентов отраженных от объектов радиосигналов, соответствующие элементам одного столбца ПМР, измеряют на одной частоте, а другого - на другой частоте.
В качестве прототипа выбрано устройство измерения ПМР объекта [5], включающее двухканальную по поляризации антенну, два переключателя прием-передача (ППП), коммутатор каналов (КК), передатчик, формирователь ортогональных радиосигналов (ФОС), задающий генератор (ЗГ), синхронизатор, гетеродин, два смесителя, четыре согласованных фильтра (СФ), четыре блока квадратурных фазовых детекторов (БКФД) и аналого- цифровой преобразователь, причем первый выход синхронизатора подключен к первым входам ФОС, передатчика и КК, к второму входу передатчика подключен первый выход гетеродина, к третьему входу передатчика - выход ФОС, к второму входу которого подключен выход задающего генератора, выход передатчика подключен к входу КК, выходы которого через соответствующие ППП подключены к первому и второму входам двухканальной по поляризации антенны соответственно, вторые выходы ППП подключены к первым входам первого и второго смесителей, к вторым входам смесителей подключен второй выход гетеродина, выход первого смесителя через первый и третий СФ подключен к вторым входам первого и второго БКФД соответственно, выход второго смесителя через второй и четвертый СФ - к вторым входам третьего и четвертого БКФД соответственно, к первым входам всех БКФД подключен выход ЗГ, выходы всех БКФД и второй выход синхронизатора подключены к соответствующим входам АЦП, выходы которого являются выходами устройства.
Недостатком устройства, выбранного в качестве прототипа, является методическая погрешность, получаемая при измерении ПМР объектов, вызванная тем, что амплитуды и фазы радиосигналов, соответствующие элементам одного столбца ПМР, измеряют в один момент времени, а амплитуды и фазы радиосигналов, соответствующие элементам ПМР другого столбца - через промежуток времени, на который сдвинуты сигналы друг относительно друга. При этом необходимость уменьшения длительности импульса в два раза для реализации последовательного измерения элементов одного и второго столбца ПМР приводит к уменьшению отношения радиосигнал-шум соответственно в два раза и уменьшению точности измерения элементов ПМР, связанного с таким ухудшением отношения радиосигнал-шум.
Раскрытие изобретения
В основу изобретений положена техническая задача, заключающаяся в повышении точности измерения ПМР при обработке векторных радиосигналов в полнополяризационных радиолокационных станциях за счет одновременного измерения всех элементов ПМР и вычитания получаемой при этом методической ошибки.
Поставленная задача решается тем, что в предложенном способе обработки векторных радиосигналов в полнополяризационных радиолокационных станциях (ПП РЛС) в каждом периоде зондирования на одной несущей частоте на ортогональных поляризациях одновременно излучают два ортогональных по структуре векторных радиосигнала, запоминают начальные фазы излученных радиосигналов, принимают ортогонально поляризованные составляющие отраженных от объекта радиосигналов, выходные радиосигналы каждого, соответствующего по поляризации канала приемника подают на фильтры, каждый из которых согласован с одним из излученных ортогональных по структуре радиосигналов, из радиосигналов на выходе согласованных фильтров вычитают методическую ошибку, полученную в результате одновременного излучения и одновременного приема двух радиосигналов, при этом получают совокупность результатов измерений, которая определяет измеренное значение поляризационной матрицы рассеяния объекта, являющееся результатом обработки векторных радиосигналов в полнополяризационных радиолокационных станциях.
Сущность предложенного способа заключается в следующем.
На одной несущей частоте на ортогональных поляризациях излучают два ортогональных по структуре векторных радиосигнала, но, в отличие от прототипа, излучают их одновременно в каждом периоде. При этом, как и в прототипе, запоминают начальные фазы излученных радиосигналов. Затем принимают ортогонально поляризованные составляющие отраженных от объекта радиосигналов. Далее выходные радиосигналы каждого, соответствующего по поляризации канала приемника подают на фильтры, каждый из которых согласован с одним из излученных ортогональных по структуре радиосигналов, при этом на выходе согласованных фильтров, в отличие от прототипа, вычитают методическую ошибку, образованную в результате одновременного излучения и одновременного приема двух радиосигналов. После вычислений получают совокупность результатов измерений, которая определяет измеренное значение поляризационной матрицы рассеяния объекта, являющееся результатом обработки векторных радиосигналов в полнополяризационных радиолокационных станциях.
Предлагаемый способ в сравнении с прототипом приводит к следующему техническому результату. В отличие от прототипа, в предлагаемом способе реализуется одновременное излучение двумя каналами ортогональных по структуре сигналов удвоенной, по сравнению с прототипом, длительности, что позволяет достичь увеличения отношения сигнал-шум в два раза, так как не требуется двукратное уменьшение длительности импульса при последовательном излучении. Кроме того, устраняется методическая погрешность ошибки измерения элементов ПМР, связанная с измерением её столбцов в различные моменты времени, характерные для прототипа, что повышает точность измерения.
Осуществление изобретения
Способ осуществляется следующим образом.
В каждом периоде зондирования лоцируемый объект облучают одновременно двумя, ортогональными по структуре векторными радиосигналами на соответствующих ортогональных поляризациях на одной несущей частоте, при этом запоминают начальные фазы излученных радиосигналов. Далее принимают ортогонально поляризованные составляющие отраженных от объекта радиосигналов, выходные радиосигналы каждого, соответствующего по поляризации канала приемника подают на фильтры, каждый из которых согласован с одним из излученных ортогональных по структуре радиосигналов, при этом на выходе согласованных фильтров, в отличие от прототипа, вычитают методическую ошибку, образованную в результате одновременного излучения и одновременного приема двух радиосигналов. Далее, как и в прототипе, радиосигналы поступают на блоки квадратурных фазовых детекторов, на выходе которых при этом получают совокупность результатов измерений, которая определяет измеренное значение поляризационной матрицы рассеяния объекта, являющееся результатом обработки векторных радиосигналов в полнополяризационных радиолокационных станциях.
Для пояснения осуществления компенсации методической ошибки представим входные радиосигналы приемников следующим образом:
 ,
,
 , (2)
, (2)
где  ,
,  – радиосигналы на входе ортогонально поляризованных каналов;
– радиосигналы на входе ортогонально поляризованных каналов;
 ,
,  – составляющие радиосигналов
– составляющие радиосигналов  и
и  , излученные и принятые в одноименных плоскостях поляризации;
, излученные и принятые в одноименных плоскостях поляризации;
 ,
,  – составляющие радиосигналов и , излученные и принятые в перекрестных плоскостях поляризации;
– составляющие радиосигналов и , излученные и принятые в перекрестных плоскостях поляризации;
, – излученные в ортогональных поляризациях ортогональные по структуре радиосигналы;
 ,
,  ,
,  ,
,  – элементы ПМР
– элементы ПМР  .
.
Тогда радиосигналы на выходе согласованных фильтров будут иметь следующий вид:
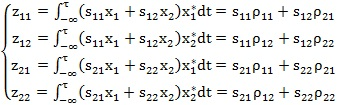 , (3)
, (3)
где  ,
,  ,
,  ,
,  – авто- и взаимно-корреляционные функции радиосигналов и .
– авто- и взаимно-корреляционные функции радиосигналов и .
Решением данной системы уравнений являются элементы ПМР:
 (4)
(4)
Соответственно, в предложенном способе при измерении элементов ПМР учитывают данное решение системы уравнений, и методическая ошибка, вызванная одновременным излучением и одновременным приемом радиосигналов, компенсируется.
Вычисленные таким образом значения ПМР и являются результатом обработки векторных радиосигналов в полнополяризационных радиолокационных станциях
Предлагаемый способ может быть реализован, например, с помощью устройства, структурная схема которого приведена на чертеже (Фиг. 1).
Предлагаемое устройство содержит двухканальную по поляризации антенну (А) 1, два переключателя прием-передача (ППП) 2 и 3, коммутатор каналов (КК) 4, передатчик 5, формирователь ортогональных сигналов (ФОС) 7, задающий генератор (ЗГ) 8, гетеродин 9, синхронизатор 10, первый смеситель 11, второй смеситель 12, четыре согласованных фильтра (СФ) 13, 14, 15, 16, четыре блока квадратурных фазовых детекторов (БКФД) 29, 30, 31, 32, аналого-цифровой преобразователь (АЦП) 33. В отличие от прототипа устройство содержит передатчик 6, четыре сумматора 17, 19, 21, 23, четыре аттенюатора 18, 20, 22, 24, четыре усилителя 25, 26, 27, 28.
Выходы передатчиков 5 и 6 подключены к первому и второму входам КК, первый и второй выходы которого через соответствующие ППП 2 и 3 подключены к первому и второму входам А 1. Вторые выходы ППП 2 и 3 подключены к первым входам смесителей 11 и 12 соответственно. Первый выход синхронизатора 10 подключен к первым входам КК 4, передатчиков 5 и 6 и ФОС 7. Первый и второй выходы гетеродина 9 подключены к вторым входам передатчиков 5 и 6, а первый и второй выходы ФОС 7 подключены к третьим входам передатчиков 5 и 6. Выход ЗГ 8 подключен к второму входу ФОС 7 и к первым входам БКФД 29, 30, 31, 32. Третий выход гетеродина 9 подключен к вторым входам смесителей 11 и 12. Выход смесителя 11 подключен к входам СФ 13 и 14, выход смесителя 12 подключен к входам СФ 15 и 16. Выход СФ 13 подключен к первому входу сумматора 17 и входу аттенюатора 20. Выход СФ 14 подключен к первому входу сумматора 19 и входу аттенюатора 18. Выход СФ 15 подключен к первому входу сумматора 21 и входу аттенюатора 24. Выход СФ 16 подключен к первому сумматора 23 и входу аттенюатора 22. Выходы аттенюаторов 18, 20, 22, 24 подключены к вторым входам сумматоров 17, 19, 21, 23 соответственно. Выходы сумматоров 17, 19, 21, 23 подключены к входам усилителей 25, 26, 27, 28 соответственно. Выходы усилителей 25, 26, 27, 28 подключены к вторым входам БКФД 29, 30, 31, 32 соответственно. Второй выход синхронизатора 10 и выходы БКФД 29, 30, 31, 32 подключены к соответствующим входам АЦП 33, выходы которого являются выходами устройства.
Устройство работает следующим образом.
Задающий генератор 8 непрерывно вырабатывает напряжение промежуточной частоты, которое подается на второй вход ФОС 7. В каждом периоде зондирования ФОС 7 по тактовому синхроимпульсу, поступающему на его первый вход с первого выхода синхронизатора 10, вырабатывает одновременно в два канала на первый и второй свои выходы соответственно два ортогональных по структуре радиосигнала и таких, что их взаимная корреляционная функция стремится к нулю. В частности, в качестве таких ортогональных радиосигналов могут быть использованы две специально подобранные многофазные фазокодоманипулированные последовательности [6, 7]. Сформированные на промежуточной частоте ортогональные по структуре радиосигналы и поступают на третьи входы передатчиков 5 и 6, на вторые входы которых при этом подаются высокочастотные колебания с первого и второго выходов гетеродина 8 соответственно. В передатчиках осуществляется перенос поступающих колебаний на несущую частоту и усиление полученных радиосигналов по мощности. Импульсы синхронизатора 10, поступающие на первые входы передатчиков 5 и 6, обеспечивают синхронную работу КК 4, передатчиков 5 и 6 и ФОС 7. В каждом периоде зондирования КК 4 по синхроимпульсу, поступающему на его первый вход с первого выхода синхронизатора 10, одновременно, через соответствующие ППП 2 и 3, подключает выходные радиосигналы передатчиков 5 и 6 к соответствующим ортогональным по поляризации каналам А 1, которая излучает их в направлении лоцируемого объекта. Использование непрерывных колебаний ЗГ 8 и гетеродина 9 при одновременном формировании излучаемых и при одновременной обработке принимаемых сигналов обеспечивает запоминание начальных фаз радиосигналов, излучаемых на различных поляризациях. При приеме на каждый из ортогональных по поляризации каналов А 1 принимается сумма составляющих радиосигналов и , излученных и принятых в одноименных и перекрестных плоскостях поляризации (2). Эти суммы составляющих радиосигналов и через ППП 2 и 3 подаются на входы смесителей 11 и 12 соответственно, выход каждого из которых подключен к входам двух согласованных фильтров 13, 14 и 15, 16 соответственно. В каждой паре фильтров один фильтр согласован с радиосигналом , а другой – с радиосигналом , вырабатываемыми ФОС 7. Это позволяет на выходах четырех СФ 13, 14, 15, 16 одновременно получить четыре радиосигнала (3)  ,
,  ,
,  ,
,  соответственно, то есть выделить отдельно каждую ортогонально поляризованную составляющую отраженного от объекта радиосигнала.
соответственно, то есть выделить отдельно каждую ортогонально поляризованную составляющую отраженного от объекта радиосигнала.
Далее, из одновременно полученных составляющих , , , (3) необходимо получить , , , – элементы ПМР . Для этого, в соответствии с решением системы уравнений (4), схема устройства содержит четыре сумматора 17, 19, 21, 23, четыре аттенюатора 18, 20, 22, 24 и четыре усилителя 25, 26, 27, 28. Примем  , где K – больше единицы, так как взаимно-корреляционные функции ,
, где K – больше единицы, так как взаимно-корреляционные функции ,  радиосигналов и стремятся к нулю, соответственно K – коэффициент усиления усилителей 25, 26, 27, 28. Примем
радиосигналов и стремятся к нулю, соответственно K – коэффициент усиления усилителей 25, 26, 27, 28. Примем  ,
,  , тогда данные коэффициенты в соответствии с вышесказанным будут являться коэффициентами аттенюаторов:
, тогда данные коэффициенты в соответствии с вышесказанным будут являться коэффициентами аттенюаторов:  – для аттенюаторов 18 и 22, а
– для аттенюаторов 18 и 22, а  – для аттенюаторов 19 и 23. В сумматорах 17, 19, 21, 23 в соответствии с (4) получим следующие значения: для сумматора 17
– для аттенюаторов 19 и 23. В сумматорах 17, 19, 21, 23 в соответствии с (4) получим следующие значения: для сумматора 17  , для сумматора 19
, для сумматора 19  , для сумматора 21
, для сумматора 21  , для сумматора 23
, для сумматора 23  . Тогда, в соответствии решением (4) системы уравнений (3) и в соответствии со схемой устройства, изображенной на чертеже (Фиг. 1), при подключении выходов СФ 13, 14, 15, 16 к первым входам сумматоров 17, 19, 21, 23 соответственно и к входам аттенюаторов 20, 18, 24, 22 соответственно, выходов аттенюаторов 18, 20, 22, 24 к вторым входам сумматоров 17, 19, 21, 23, а выходов сумматоров 17, 19, 21, 23 к входам усилителей 25, 26, 27, 28, на выходах усилителей будут элементы ПМР , , , соответственно. Данные значения элементов ПМР с выходов усилителей 25, 26, 27, 28 подаются на вторые входы соответствующих БКФД 29, 30, 31, 32. При этом в качестве опорного напряжения на первые входы БКФД 29, 30, 31, 32 подается напряжение промежуточной частоты с выхода задающего генератора 8. Использование в качестве напряжения гетеродина в смесителях приемника 11 и 12 выходного напряжения гетеродина 9, а в качестве опорных напряжений для БКФД 29, 30, 31, 32 выходного напряжения задающего генератора 8, позволяет скомпенсировать случайные начальные фазы радиосигналов, одновременно излучаемых на разных поляризациях. Каждый БКФД имеет два выхода. По первому выходу выдается напряжение, пропорциональное произведениям амплитуд на косинус, а по второму - на синус разности фаз колебаний, поступающих на входы БКФД. Аналого-цифровой преобразователь 33 производит измерение напряжений сигналов, поступающих с выходов БКФД, осуществляя оцифровку их значений. По сигналам со второго выхода синхронизатора 10 измеренные значения амплитуд квадратурных составляющих, определяющих измеренные значения элементов ПМР объекта, выдаются потребителю.
. Тогда, в соответствии решением (4) системы уравнений (3) и в соответствии со схемой устройства, изображенной на чертеже (Фиг. 1), при подключении выходов СФ 13, 14, 15, 16 к первым входам сумматоров 17, 19, 21, 23 соответственно и к входам аттенюаторов 20, 18, 24, 22 соответственно, выходов аттенюаторов 18, 20, 22, 24 к вторым входам сумматоров 17, 19, 21, 23, а выходов сумматоров 17, 19, 21, 23 к входам усилителей 25, 26, 27, 28, на выходах усилителей будут элементы ПМР , , , соответственно. Данные значения элементов ПМР с выходов усилителей 25, 26, 27, 28 подаются на вторые входы соответствующих БКФД 29, 30, 31, 32. При этом в качестве опорного напряжения на первые входы БКФД 29, 30, 31, 32 подается напряжение промежуточной частоты с выхода задающего генератора 8. Использование в качестве напряжения гетеродина в смесителях приемника 11 и 12 выходного напряжения гетеродина 9, а в качестве опорных напряжений для БКФД 29, 30, 31, 32 выходного напряжения задающего генератора 8, позволяет скомпенсировать случайные начальные фазы радиосигналов, одновременно излучаемых на разных поляризациях. Каждый БКФД имеет два выхода. По первому выходу выдается напряжение, пропорциональное произведениям амплитуд на косинус, а по второму - на синус разности фаз колебаний, поступающих на входы БКФД. Аналого-цифровой преобразователь 33 производит измерение напряжений сигналов, поступающих с выходов БКФД, осуществляя оцифровку их значений. По сигналам со второго выхода синхронизатора 10 измеренные значения амплитуд квадратурных составляющих, определяющих измеренные значения элементов ПМР объекта, выдаются потребителю.
Предлагаемое устройство в сравнении с прототипом обладает следующими техническими преимуществами. В отличие от прототипа, в предлагаемом устройстве с помощью второго передатчика и измененной, по сравнению с прототипом, логики работы коммутатора каналов, формирователя ортогональных сигналов и синхронизатора, реализуется одновременное излучение двумя каналами ортогональных по структуре сигналов удвоенной, по сравнению с прототипом, длительности, что позволяет достичь увеличения отношения сигнал-шум в два раза, так как не требуется двукратное уменьшение длительности импульса при последовательном излучении. Кроме того, с помощью сумматоров, усилителей и аттенюаторов устраняется методическая погрешность ошибки измерения элементов ПМР, связанная с измерением её столбцов в различные моменты времени, характерные для прототипа, что повышает точность измерения ПМР и, соответственно, повышает точность результата обработки векторных радиосигналов в полнополяризационных радиолокационных станциях.
Промышленная применимость.
Данные способ и устройство могут быть реализованы на современной элементной базе и с наибольшим эффектом могут быть применены в полнополяризационных радиолокационных станциях.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Хойнен Д.Р. Измерение матрицы рассеяния // ТИИЭР. - 1965. - т.53, № 8. - С. 1074—1084.
2. Канарейкин Д.Б., Павлов Н.Ф., Потехин В.А Поляризация радиолокационных сигналов. - М.: Сов.радио, 1966. - 440 с.
3. Канарейкин Д.Б., Потехин В.А., Шишкин И.Ф. Морская поляриметрия. - Ленинград: Судостроение, 1968. - 328 с.
4. Храбростин Б.В., Никитин В.М. Способ и устройство для измерения поляризационной матрицы рассеяния объекта // Патент РФ ИЗ № 2190239. 27.09.2002. Бюл. № 27.
5. Храбростин Б.В., Храбростин Д.Б Устройство для измерения поляризационной матрицы рассеяния объекта // Патент РФ ИЗ № 2183022. 27.05.2002. Бюл. № 15.
6. Кук Ч., Бернфельд М. Радиолокационные сигналы. - М.: Сов.радио, 1971. - 568 с.
7. Леухин А.Н. Теория синтеза дискретных фазокодированных последовательностей с одноуровневой периодической автокорреляционной функцией: уч.пособие. В 2 кн. Кн.1. – Йошкар-Ола: ФГБОУ ВПО «Марийский государственный университет», 2015. – 320 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2183022C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕИВАНИЯ ОБЪЕКТА | 2001 |
|
RU2187129C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2204842C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2190239C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ШИРОКОПОЛОСНЫМ НЕПРЕРЫВНЫМ ЛИНЕЙНО ЧАСТОТНО-МОДУЛИРОВАННЫМ ИЗЛУЧЕНИЕМ | 2010 |
|
RU2460087C2 |
| Способ и устройство оценки комплексной матрицы обратного рассеяния радиолокационных объектов (варианты) | 2023 |
|
RU2810535C1 |
| Способ измерения поляризационной матрицы рассеяния объекта с компенсацией искажений | 2017 |
|
RU2638559C1 |
| СОВМЕЩЕННАЯ СИСТЕМА РАДИОЛОКАЦИИ И СВЯЗИ НА РАДИОФОТОННЫХ ЭЛЕМЕНТАХ | 2018 |
|
RU2697389C1 |
| Контрольно-проверочный комплекс радиолокационных станций самолёта | 2022 |
|
RU2792260C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛЯРИЗАЦИОННЫХ ХАРАКТЕРИСТИК СРЕДЫ РАСПРОСТРАНЕНИЯ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ | 2013 |
|
RU2533789C1 |

Изобретение относится к области радиолокации и может быть использовано для оценки характеристик рассеяния электромагнитных волн объектом, для распознавания различий в данных характеристиках между объектами, движущимися с различными скоростями, обнаружения, оценки координат и распознавания объектов. Достигаемый технический результат - повышение точности измерения поляризационной матрицы рассеяния (ПМР) при обработке векторных радиосигналов в полнополяризационных радиолокационных станциях. Указанный результат достигается за счет одновременного измерения всех элементов ПМР, обеспечивающего увеличение отношения сигнал-шум в два раза, а также за счет устранения методической погрешности ошибки измерения элементов ПМР, связанной с измерением её столбцов в различные моменты времени, что повышает точность результата обработки векторных радиосигналов в полнополяризационных радиолокационных станциях. 2 н.п. ф-лы, 1 ил.
1. Способ обработки векторного сигнала в полнополяризационных радиолокационных станциях, заключающийся в том, что на одной несущей частоте на ортогональных поляризациях излучают ортогональные по структуре векторные радиосигналы, запоминают начальные фазы излученных радиосигналов, принимают ортогонально поляризованные составляющие отраженных от объекта радиосигналов, выходные радиосигналы каждого соответствующего по поляризации канала приемника подают на фильтры, каждый из которых согласован с одним из излученных ортогональных по структуре радиосигналов, измеряют параметры выходного радиосигнала, определяющие соответствующий элемент поляризационной матрицы рассеяния объекта, отличающийся тем, что в каждом периоде зондирования два ортогональных по структуре радиосигнала на соответствующих ортогональных поляризациях излучают одновременно и принимают одновременно; из сигналов на выходе согласованных фильтров вычитают методическую ошибку, полученную в результате одновременного излучения и одновременного приема двух сигналов, при этом получают совокупность результатов измерений, которая определяет измеренное значение поляризационной матрицы рассеяния объекта, являющееся результатом обработки векторных радиосигналов в полнополяризационных радиолокационных станциях.
2. Устройство обработки векторного сигнала в полнополяризационных радиолокационных станциях, включающее двухканальную по поляризации антенну, два переключателя прием-передача, коммутатор каналов, передатчик, формирователь ортогональных сигналов, задающий генератор, гетеродин, синхронизатор, два смесителя, четыре согласованных фильтра, четыре блока квадратурных фазовых детекторов, аналого-цифровой преобразователь, отличающееся тем, что устройство содержит второй передатчик, четыре сумматора, четыре усилителя и четыре аттенюатора, причем выходы передатчиков подключены к первому и второму входам коммутатора каналов, первый и второй выходы которого через соответствующие переключатели прием-передача подключены к первому и второму входам двухканальной по поляризации антенны, вторые выходы переключателей прием-передача подключены к первым входам первого и второго смесителей соответственно; первый выход синхронизатора подключен к первым входам коммутатора каналов, передатчиков и формирователя ортогональных сигналов; первый и второй выходы гетеродина подключены к вторым входам, а первый и второй выходы формирователя ортогональных сигналов – к третьим входам передатчиков; выход задающего генератора подключен к второму входу формирователя ортогональных сигналов и к первым входам блоков квадратурных фазовых детекторов, третий выход гетеродина подключен к вторым входам смесителей; выход первого смесителя подключен к входам первого и второго согласованных фильтров, выход второго смесителя подключен к входам третьего и четвертого согласованных фильтров; выход первого согласованного фильтра подключен к первому входу первого сумматора и входу второго аттенюатора, выход второго согласованного фильтра подключен к первому входу второго сумматора и входу первого аттенюатора, выход третьего согласованного фильтра подключен к первому входу третьего сумматора и входу четвертого аттенюатора, выход четвертого согласованного фильтра подключен к первому входу третьего аттенюатора и входу четвертого сумматора; выходы четырех аттенюаторов подключены ко вторым входам соответствующих сумматоров, выходы которых подключены к входам соответствующих усилителей, выходы которых подключены к вторым входам соответствующих блоков квадратурных фазовых детекторов; второй выход синхронизатора и выходы блоков квадратурных фазовых детекторов подключены к соответствующим входам аналого-цифрового преобразователя, выходы которого являются выходами устройства.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2190239C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2183022C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО РАДИОКОНТРОЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2546330C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2016 |
|
RU2624449C1 |
| JP 6213943 A, 05.08.1994 | |||
| US 4660044 A, 21.04.1987 | |||
| WO 2006079437 A1, 03.08.2006. | |||

