Изобретение относится к области радиолокации и может быть использовано в радиолокационных системах с зондирующими сигналами, кодированными по фазе (фазокодоманипулированными сигналами), для измерения поляризационной матрицы рассеяния объекта.
Из уровня техники известен способ измерения поляризационной матрицы рассеяния объекта, заключающийся в том, что одновременно излучают на ортогональных поляризациях одинаковые по структуре радиосигналы на разных несущих частотах, принимают ортогонально поляризованные составляющие отраженных от объекта радиосигналов. Одинаковые по поляризации составляющие отраженных радиосигналов, принятые каждым приемным каналом, разделяют за счет использования фильтров, настроенных на частоты, соответствующие частотам излученных радиосигналов, измеряют амплитуды и фазы каждой из выделенных ортогонально поляризованных составляющих отраженных радиосигналов и получают совокупность результатов измерений, которая определяет измеренное значение поляризационной матрицы рассеяния объекта [Д.Б. Канарейкин, М.В. Павлов, В.А. Потехин. Поляризация радиолокационных сигналов. М.: Сов. Радио, 1966, с. 118-124, с. 282-293].
В качестве прототипа для заявляемого изобретения выбран способ измерения поляризационной матрицы рассеяния объекта [Патент RU №2204842, МПК G01S 13/00, опубликован 20.05.2003], в котором излучают одновременно на ортогональных поляризациях соответствующие ортогональные по структуре радиосигналы на одной несущей частоте, одновременно принимают все ортогонально поляризованные составляющие отраженных от объекта радиосигналов, выходные радиосигналы каждого соответствующего по поляризации канала приемника подают на фильтры, каждый из которых согласован с одним из излученных ортогональных по структуре радиосигналов, измеряют параметры выходного радиосигнала каждого согласованного фильтра, определяющие соответствующий элемент поляризационной матрицы рассеяния объекта, и получают совокупность результатов измерений, которая определяет измеренное значение поляризационной матрицы рассеяния объекта.
Техническая проблема, решаемая созданием данного изобретения, заключается в наличии методической погрешности измерения (искажений) поляризационной матрицы рассеяния объекта, обусловленной неидентичностью используемых передающих и приемных каналов, обеспечивающих излучение и прием радиосигналов. Физическая реализация идентичных двух передающих и двух приемных каналов затруднительна, кроме того каждый из каналов изменяет свои параметры во времени, которые зависят от температуры и других внешних факторов.
Технический результат, на который направлено заявляемое изобретение, заключается в повышении точности измерения поляризационной матрицы рассеяния объекта за счет компенсации возникающих искажений (погрешности измерения).
Технический результат достигается тем, что в способе измерения поляризационной матрицы рассеяния объекта с компенсацией искажений при зондировании на одной несущей частоте на ортогональных поляризациях одновременно излучают соответствующие ортогональные по структуре радиосигналы. Принимают одновременно все ортогонально поляризованные составляющие отраженных от объекта радиосигналов. Выходные радиосигналы каждого соответствующего по поляризации канала приемника подают на фильтры, каждый из которых согласован с одним из излученных ортогональных по структуре радиосигналов. Для компенсации искажений, обусловленных неидентичностью используемых передающих и приемных каналов, радиосигналы на выходах согласованных фильтров умножают на весовые коэффициенты, которые находят до излучения зондирующих радиосигналов по объекту локации на основе анализа результатов работы радиолокационной станции. После чего измеряют на выходах умножителей параметры радиосигналов, определяющие соответствующие элементы поляризационной матрицы рассеяния объекта. Измеренные значения кроссовых элементов поляризационной матрицы рассеяния объекта объединяют.
Сущность заявляемого способа измерения поляризационной матрицы рассеяния объекта с компенсацией искажений состоит в том, что при зондировании на одной несущей частоте на ортогональных поляризациях одновременно излучают соответствующие ортогональные по структуре радиосигналы (осуществляют облучение объекта). После этого принимают одновременно все (четыре) ортогонально поляризованные составляющие отраженных от объекта радиосигналов двумя, соответствующими по поляризации, каналами приемника. Для разделения одинаково поляризованных составляющих отраженных радиосигналов выходные радиосигналы каждого соответствующего по поляризации канала приемника подают на фильтры, каждый из которых согласован с одним из излученных радиосигналов. Для компенсации искажений, обусловленных неидентичностью используемых передающих и приемных каналов, радиосигналы на выходах согласованных фильтров умножают на весовые коэффициенты. После этого измеряют на выходах умножителей параметры радиосигналов, определяющие соответствующие элементы поляризационной матрицы рассеяния объекта. Измеренные значения кроссовых элементов поляризационной матрицы рассеяния объекта объединяют.
Весовые коэффициенты находят до излучения зондирующих радиосигналов по объекту локации на основе анализа результатов работы радиолокационной станции:
- по контрольным целям с известными поляризационными характеристиками;
- по шумам на входе приемных каналов;
- по «пролазу» зондирующего сигнала из передающего в приемный канал в моменты излучения;
- по фоновым отражениям от земной поверхности (в бортовых РЛС).
В однопозиционных радиолокационных станциях объединение кроссовых элементов поляризационной матрицы рассеяния в простейшем случае реализуемо, как вычисление:
- среднего арифметического кроссовых элементов поляризационной матрицы рассеяния;
- квадратного корня из произведения кроссовых элементов поляризационной матрицы рассеяния.
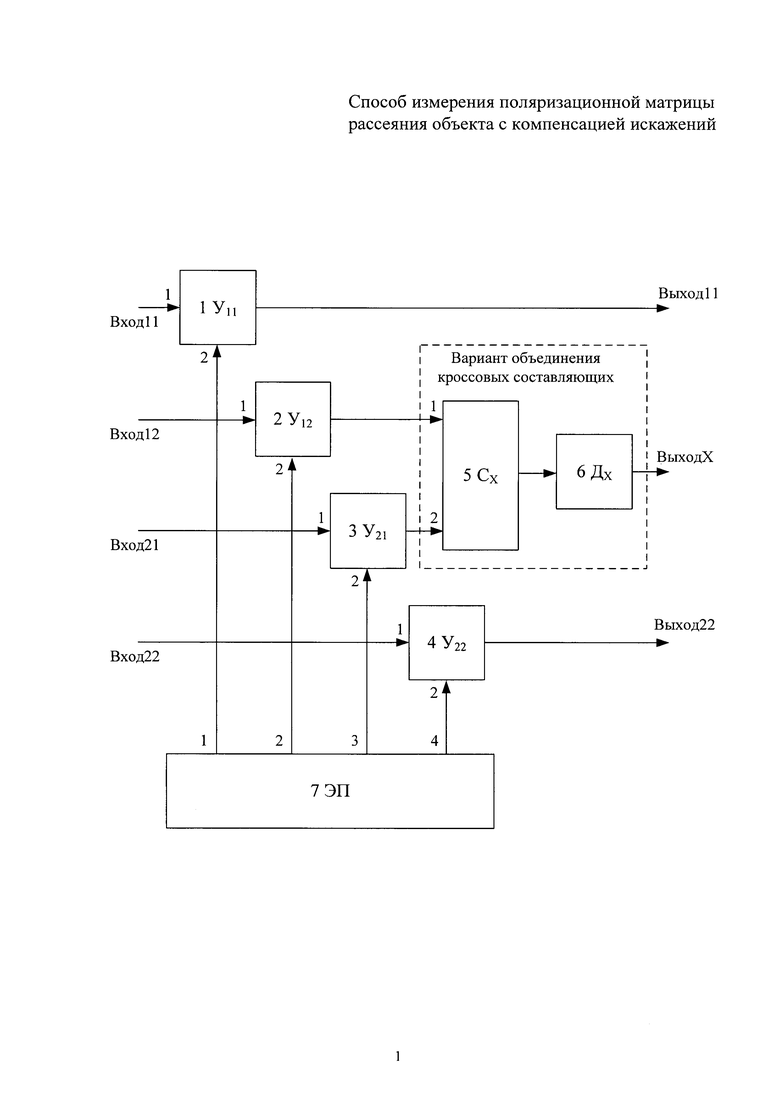
Компенсация искажений, возникающих по причине неидентичности передающих и приемных каналов при измерении поляризационной матрицы рассеяния объекта реализуема с помощью устройства, структурная схема которого представлена на рисунке.
Данное устройство состоит из первого умножителя (У11) 1, второго умножителя (У12) 2, третьего умножителя (У21) 3, четвертого умножителя (У22) 4, сумматора (СХ) 5, делителя на «два» (ДХ) 6 и элемента памяти (ЭП) 7.
Первые входы У11 1, У12 2, У21 3 и У22 4 являются входами устройства (на схеме - «вход 11», «вход 12», «вход 21» и «вход 22»). Первый, второй, третий и четвертый выходы ЭП 7 соединены со вторыми входами У11 1, У12 2, У21 3 и У22 4 соответственно. Выход У12 2 соединен с первым входом СХ 5, со вторым входом которого соединен выход У21 3. Выход СХ 5 соединен с входом ДХ 6. Выходы У11 1, ДХ 6 и У22 4 являются выходами устройства (на схеме - «выход 11», «выход Х» и «выход 22» соответственно).
Работает устройство при измерении поляризационной матрицы рассеяния объекта следующим образом.
Принимаются все ортогонально поляризованные составляющие отраженных от объекта радиосигналов. Выходные радиосигналы двух ортогональных по поляризации каналов приемника поступают на фильтры, каждый из которых согласован с одним из излученных радиосигналов. Радиосигналы с выходов согласованных фильтров подают на входы представленного устройства обработки. При этом У11 1, У12 2, У21 3 и У22 4 осуществляют умножение радиосигналов на весовые коэффициенты, содержащиеся в ЭП 7. Весовые коэффициенты находят по объекту локации до излучения зондирующих радиосигналов и выполняют предварительную их запись в ЭП 7. Результаты умножения с У11 1 и У22 4 поступают на «выход 11» и «выход 22» схемы соответственно, а результаты умножения с У12 2 и У21 3 (кроссовые составляющие) - на соответствующие входы СХ 5, который осуществляет их суммирование. После их суммирования результат делится на «два» при помощи ДХ 6, с выхода которого объединенный результат обработки кроссовых составляющих поступает на «выход Х» схемы. В данном случае использование СХ 5 и ДХ 6 является одним из вариантов объединения кроссовых составляющих (вычисление среднего арифметического кроссовых элементов поляризационной матрицы рассеяния). Результаты обработки сигналов на выходах устройства («выход 11», «выход Х» и «выход 22») будут соответствовать измеренным значениям поляризационных составляющих, отраженных от объекта радиосигналов, которые определяют поляризационную матрицу рассеяния объекта в однопозиционных радиолокационных станциях, с учетом равенства кроссовых составляющих.
Таким образом, использование весовых коэффициентов и объединения результатов обработки кроссовых составляющих принятых радиосигналов позволяет компенсировать искажения, обусловленные неидентичностью передающих и приемных каналов, и, следовательно, значительно повысить точность измерения поляризационной матрицы рассеяния объекта.
Промышленная применимость данного способа возможна, исходя из того, что все используемые операции практически реализуемы в аналоговой и цифровой технике, а также программным способом в вычислительной технике.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2204842C2 |
| Способ измерения поляризационной матрицы рассеяния объекта | 2016 |
|
RU2619769C1 |
| Способ и устройство обработки векторных радиосигналов в полнополяризационных радиолокационных станциях | 2019 |
|
RU2695077C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2190239C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕИВАНИЯ ОБЪЕКТА | 2001 |
|
RU2187129C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛЯРИЗАЦИОННЫХ ХАРАКТЕРИСТИК СРЕДЫ РАСПРОСТРАНЕНИЯ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ | 2013 |
|
RU2533789C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ОБЪЕКТОВ И РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2371730C1 |
| Способ и устройство оценки комплексной матрицы обратного рассеяния радиолокационных объектов (варианты) | 2023 |
|
RU2810535C1 |
| СПОСОБ КОМПЛЕКСНОЙ ЛОКАЦИИ ЦЕЛИ | 2009 |
|
RU2416108C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2183022C1 |
Изобретение относится к области радиолокации и может быть использовано в радиолокационных системах с зондирующими сигналами, кодированными по фазе (фазокодоманипулированными сигналами), для измерения поляризационной матрицы рассеяния объекта. Достигаемый технический результат - повышение точности измерения поляризационной матрицы рассеяния объекта за счет компенсации возникающих искажений (погрешности измерения). Технический результат достигается тем, что в способе измерения поляризационной матрицы рассеяния объекта с компенсацией искажений при зондировании на одной несущей частоте на ортогональных поляризациях одновременно излучают соответствующие ортогональные по структуре радиосигналы, принимают одновременно все ортогонально поляризованные составляющие отраженных от объекта радиосигналов, выходные радиосигналы каждого соответствующего по поляризации канала приемника подают на фильтры, каждый из которых согласован с одним из излученных ортогональных по структуре радиосигналов, при этом для компенсации искажений, обусловленных неидентичностью используемых передающих и приемных каналов, радиосигналы на выходах согласованных фильтров умножают на весовые коэффициенты, которые находят до излучения зондирующих радиосигналов по объекту локации на основе анализа результатов работы радиолокационной станции, после чего измеряют на выходах умножителей параметры радиосигналов, определяющие соответствующие элементы поляризационной матрицы рассеяния объекта, при этом измеренные значения кроссовых элементов поляризационной матрицы рассеяния объекта объединяют. 1 ил.
Способ измерения поляризационной матрицы рассеяния объекта с компенсацией искажений, заключающийся в том, что при зондировании на одной несущей частоте на ортогональных поляризациях одновременно излучают соответствующие ортогональные по структуре радиосигналы, принимают одновременно все ортогонально поляризованные составляющие отраженных от объекта радиосигналов, выходные радиосигналы каждого соответствующего по поляризации канала приемника подают на фильтры, каждый из которых согласован с одним из излученных ортогональных по структуре радиосигналов, отличающийся тем, что для компенсации искажений, обусловленных неидентичностью используемых передающих и приемных каналов, радиосигналы на выходах согласованных фильтров умножают на весовые коэффициенты, которые находят до излучения зондирующих радиосигналов по объекту локации на основе анализа результатов работы радиолокационной станции по контрольным целям с известными поляризационными характеристиками, а также по шумам на входе приемных каналов, по просачиванию зондирующего сигнала из передающего в приемный канал в моменты излучения, по фоновым отражениям, после чего измеряют на выходах умножителей параметры радиосигналов, определяющие соответствующие элементы поляризационной матрицы рассеяния объекта, объединяя измеренные значения кроссовых элементов поляризационной матрицы рассеяния объекта, с учетом их равенства.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2204842C2 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ЭЛЕМЕНТОВ МАТРИЦЫ РАССЕЯНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2331896C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛЯРИЗАЦИОННЫХ ХАРАКТЕРИСТИК СРЕДЫ РАСПРОСТРАНЕНИЯ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ | 2013 |
|
RU2533789C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕИВАНИЯ ОБЪЕКТА | 2001 |
|
RU2187129C1 |
| US 20070152867 A1, 05.07.2007 | |||
| US 5311192 A, 10.05.1005 | |||
| EP 701144 A1, 13.03.1996. | |||

