Область техники
Группа изобретений относится к радиолокационной (РЛ) технике и может быть использована в обзорных однопозиционных радиолокационных станциях (РЛС), а также в радиолокаторах с синтезированной апертурой антенны (РСА), производящих оценку поляризационных свойств зондируемых объектов.
Уровень техники
Известны способ и устройство измерения поляризационной матрицы рассеяния объекта (МОР) [1], где в каждом периоде зондирования объект облучают двумя, сдвинутыми по времени, ортогональными по структуре радиосигналами SX и SY на соответствующих ортогональных поляризациях и на одной несущей частоте. Запоминают начальные фазы излученных радиосигналов. Принимают все (четыре) ортогонально поляризованные составляющие отраженных от объекта радиосигналов двумя, соответствующими по поляризации, каналами приемника. Для разделения ортогональных по структуре одинаково поляризованных составляющих отраженных радиосигналов, принятых соответствующим по поляризации каналом приемника, выходной радиосигнал каждого канала приемника подают на входы двух корреляторов, в качестве опорных напряжений на которые подают соответствующие излученным ортогональные по структуре радиосигналы, задержанные относительно излученных на время задержки соответствующих отраженных сигналов. Из фазы каждого выходного радиосигнала вычитают запомненное значение начальной фазы соответствующего излученного радиосигнала. Измеряют параметры выходного сигнала каждого коррелятора, определяющие соответствующий элемент поляризационной МОР. Исключают задержку по времени измерения параметров, которая обусловлена разным временем излучения радиосигналов на разных поляризациях, и получают совокупность результатов измерений, которая определяет измеренное значение МОР объекта.
Недостатком способа является низкая точность измерения МОР объектов в реальных условиях радиолокационного зондирования пространства, когда отражающий объект - не единственный и наблюдается в присутствии других объектов, распределенных по зондируемому пространству. Различие эффективной поверхности обратного рассеяния (ЭПР) объектов достигает шести порядков (60 дБ) и более. В таких условиях оценка МОР «малого» объекта (в присутствии в соседних стробах разрешения «больших» объектов) производится с низкой точностью, поскольку реальная развязка ортогональных по временной структуре сигналов SX и SY в современных системах редко превышает величину минус 45 дБ, т.к. реальная база сложного зондирующего сигнала РСА составляет величину N ~ 5÷33-103 [2;3].
Длительность сигналов SX и SY соответствует (по шкале дальности) расстоянию, на котором укладываются тысячи элементов разрешения РЛС. Например, в [2] приводятся технические характеристики РСА авиационного базирования, в которой длительность зондирующего сигнала составляет τ=5÷33 мкс, база сигнала N=τ⋅Δƒ ~ 5÷33⋅103 (Δƒ - ширина полосы сигнала излучения), период повторения сигнала Т=0,5÷1 мс. Таким образом, при использовании ортогональных сигналов SX и SY с указанными в [2] параметрами, все сигналы от объектов, расположенных в полосе дальности ΔD,

оказывают влияние друг на друга, при этом сигналы от «больших» объектов существенно искажают параметры сигналов, отраженных «малыми» объектами. Это обстоятельство обуславливает большую погрешность оценки МОР при использовании известного способа в реальных условиях функционирования РЛС, в том числе РСА. Например, при оценке МОР одиночного «малого» объекта, отклик от которого на 30 дБ выше собственных шумов приемника, относительная точность оценки элементов МОР определяется ~ этой же величиной минус 30 дБ. Но если в полосе дальности ΔD (см. выражение 1) расположен «большой» объект, отклик от которого на 75 дБ выше шумов приемника, то относительная точность оценки составит ~ 0 дБ (100%), т.к. взаимная развязка ортогональных сигналов не превышает 45 дБ и в стробе разрешения «малого» объекта присутствует паразитный сигнал от «большого» объекта, уровень которого на 30 дБ выше шумов приемника. Поэтому паразитный сигнал по уровню равен отраженному от «малого» объекта сигналу, что и обуславливает 100% ошибку в оценке его МОР.
Наиболее близким к заявляемому способу решением является способ измерения МОР объекта [5, 6].
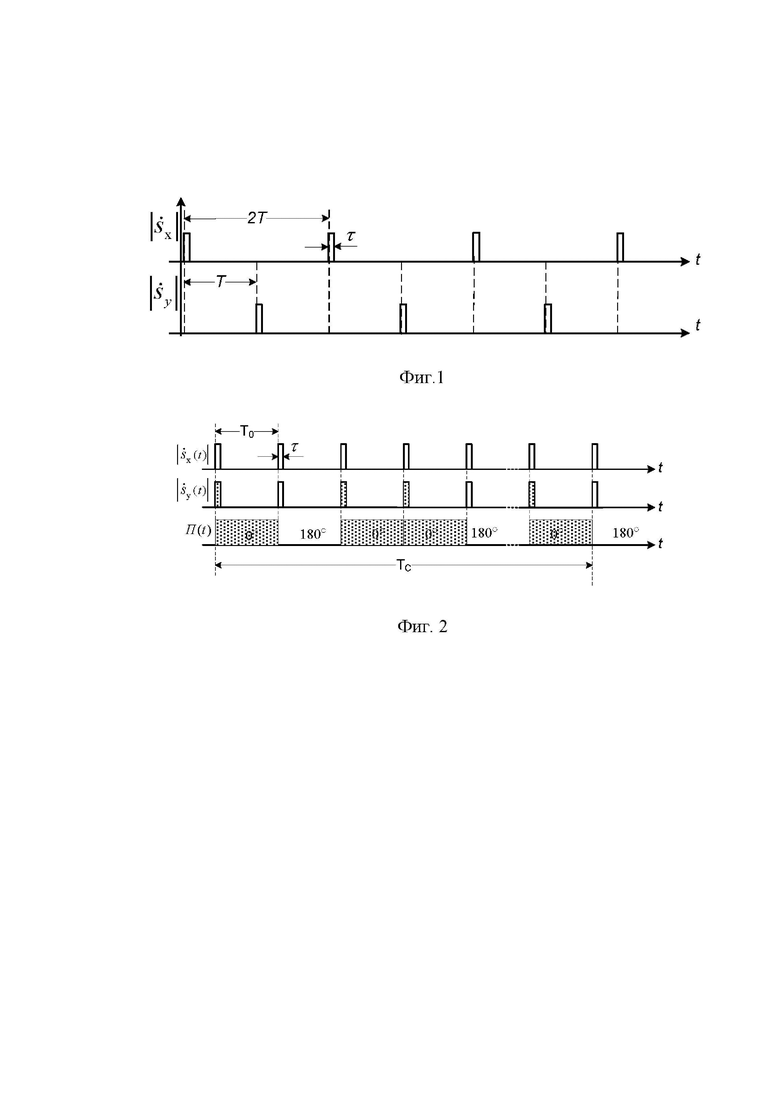
Способ заключается в том, что последовательно, через период зондирования Т, излучают на ортогональных поляризациях на одной несущей частоте одинаковые по структуре радиосигналы, описываемые комплексными огибающими  (Фиг. 1), запоминают значения начальных фаз излученных радиосигналов, после каждого излучения одновременно принимают обе ортогонально поляризованные составляющие отраженных от объекта радиосигналов, измеряют их амплитуды и фазы, из значений последних вычитают значение начальной фазы соответствующего излученного радиосигнала, исключают задержку по времени измерения параметров, которая обусловлена разным временем излучения радиосигналов на разных поляризациях, и за два последовательных излучения радиосигналов (через период зондирования Т) на разных поляризациях получают совокупность результатов измерений, которая определяет измеренное значение МОР объекта.
(Фиг. 1), запоминают значения начальных фаз излученных радиосигналов, после каждого излучения одновременно принимают обе ортогонально поляризованные составляющие отраженных от объекта радиосигналов, измеряют их амплитуды и фазы, из значений последних вычитают значение начальной фазы соответствующего излученного радиосигнала, исключают задержку по времени измерения параметров, которая обусловлена разным временем излучения радиосигналов на разных поляризациях, и за два последовательных излучения радиосигналов (через период зондирования Т) на разных поляризациях получают совокупность результатов измерений, которая определяет измеренное значение МОР объекта.
Известны поляриметрические космические РСА, реализующие известный способ [7, 11], наиболее близкие к заявляемому устройству, алгоритм работы которых включает в себя выше указанные способ оценки составляющих МОР, которые содержат антенну полного поляризационного приема-передачи электромагнитного (ЭМ) сигнала, поляризационный разделитель (ПР), первый и второй Y-циркуляторы, первый и второй цифровой приемники, первый усилитель мощности сверхвысокочастотного сигнала (СВЧ), первый цифро-аналоговый преобразователь (ЦАП), формирователь цифрового зондирующего сигнала, первое оперативное запоминающее устройство (ОЗУ), второе ОЗУ, контроллер, опорный генератор, первый и второй траекторные фильтры (ТФ). Такие РСА, кроме режима работы с одной поляризацией - вертикальной (В или V) или горизонтальной (Г или Н), обеспечивают получение изображений и измерение составляющих МОР элементов поверхности зондируемой поверхности.
Недостатком известных способа и устройства является ограниченная возможность их применения в маловысотных авиационных РСА.
Тот факт, что оценка элементов МОР в известных решениях производится по двум импульсам излучения, и период оценки МОР равен двум периодам Т сигнала излучения (каждый из столбцов МОР определяется с периодом повторения 2Т), существенно ограничивает применение способа в маловысотных авиационных РСА, поскольку частота повторения сигнала излучения определяет максимальную скорость полета носителя и однозначное измерение дальности объектов. При всех прочих равных параметрах снижение частоты повторения сигнала излучения РСА вдвое снижает максимальную скорость носителя РСА.
Сущность группы изобретений
Основной технической задачей, решаемой заявленным изобретением, является реализация возможности использования изобретения в РСА без снижения скорости обзора.
Техническим результатом является возможность оценки комплексной матрицы обратного рассеяния (КМОР) радиолокационных объектов в реальных условиях их наблюдения в радиолокаторах с синтезированной апертурой антенны (РСА), без снижения скорости обзора по сравнению с обычными, не поляриметрическими РСА, и повышенной точностью оценивания КМОР.
Технический результат достигается за счет того, что в способе оценки комплексной матрицы обратного рассеяния (КМОР) РЛ объектов, включающем формирование ортогональных по поляризации компонент импульсного векторного радиосигнала, посредством которого производится периодическое, с периодом повторения Т0, зондирование объектов, прием ортогонально поляризованных компонент  отраженного от объектов векторного радиосигнала, траекторную обработку последовательности отсчетов значений сигнала в стробе дальности, согласно предложенному решению, комплексные огибающие ортогональных по поляризации компонент излученного импульсного радиосигнала с точностью до абсолютной фазы идентичны и описываются функцией
отраженного от объектов векторного радиосигнала, траекторную обработку последовательности отсчетов значений сигнала в стробе дальности, согласно предложенному решению, комплексные огибающие ортогональных по поляризации компонент излученного импульсного радиосигнала с точностью до абсолютной фазы идентичны и описываются функцией  фаза одной любой из компонент излучаемого векторного радиосигнала манипулирована, от импульса к импульсу, в соответствии с бинарной случайной функцией П(Х), принимающей на периоде синтезирования TC=n⋅Т0, где n - количество периодов зондирования на интервале синтезирования, одно из двух равновероятных значений: -1 или 1, и обусловливающей равновероятные значения фазы 0 или 180 градусов манипулируемой компоненты, формируют сигналы
фаза одной любой из компонент излучаемого векторного радиосигнала манипулирована, от импульса к импульсу, в соответствии с бинарной случайной функцией П(Х), принимающей на периоде синтезирования TC=n⋅Т0, где n - количество периодов зондирования на интервале синтезирования, одно из двух равновероятных значений: -1 или 1, и обусловливающей равновероятные значения фазы 0 или 180 градусов манипулируемой компоненты, формируют сигналы  путем согласованной с функцией
путем согласованной с функцией  фильтрации компонент
фильтрации компонент  соответственно, формируют сигналы
соответственно, формируют сигналы 
 а оценки элементов
а оценки элементов  матрицы обратного рассеяния объекта, расположенного в элементе разрешения по дальности, формируют, соответственно, путем траекторной обработки временных последовательностей из n отсчетов значений сигналов
матрицы обратного рассеяния объекта, расположенного в элементе разрешения по дальности, формируют, соответственно, путем траекторной обработки временных последовательностей из n отсчетов значений сигналов  взятых по каждому из n последовательно излученных зондирующих импульсов в стробе дальности, соответствующем элементу разрешения.
взятых по каждому из n последовательно излученных зондирующих импульсов в стробе дальности, соответствующем элементу разрешения.
Технический результат достигается также за счет того, что в устройстве оценки КМОР РЛ объектов, содержащем антенну полного поляризационного приема-передачи ЭМ сигнала, ПР, первый и второй Y-циркуляторы, первый и второй цифровой приемники, первый усилитель мощности СВЧ, первый ЦАП, формирователь цифрового зондирующего сигнала, первое ОЗУ, второе ОЗУ, контроллер, опорный генератор, первый и второй ТФ, при этом вход антенны полного поляризационного приема-передачи ЭМ сигнала соединен с выходом ПР, первый вход ПР соединен с первым входом первого Y-циркулятора, а второй вход ПР соединен с первым входом второго Y-циркулятора, второй вход первого Y-циркулятора соединен с сигнальным СВЧ входом первого цифрового приемника, второй вход второго Y-циркулятора соединен с сигнальным СВЧ входом второго цифрового приемника, третий вход первого Y-циркулятора соединен с выходом первого усилителя мощности СВЧ, вход первого усилителя мощности СВЧ соединен с выходом первого ЦАП, выходная шина данных первого цифрового приемника соединена с шиной записи первого ОЗУ, выходная шина данных второго цифрового приемника соединена с шиной записи второго ОЗУ, шина чтения первого ОЗУ соединена с входом первого ТФ, шина чтения второго ОЗУ соединена с входом второго ТФ, выход опорного генератора соединен с входами синхронизации первого и второго цифровых приемников, входами синхронизации первого ЦАП, входами синхронизации контроллера и формирователя цифрового зондирующего сигнала, к единой шине управления контроллера подсоединены входы управления первого и второго цифровых приемников, первого и второго ОЗУ, а также формирователя цифрового зондирующего сигнала, согласно предложенному решению, дополнительно введены второй усилитель мощности СВЧ, второй ЦАП, первый, второй и третий управляемые цифровой инвертор знака числового кода, третье ОЗУ, формирователь бинарной псевдослучайной последовательности (ПСП), а также третий и четвертый ТФ, третий вход второго Y-циркулятора соединен с выходом второго усилителя мощности СВЧ, вход второго усилителя мощности СВЧ соединен с выходом второго ЦАП, вход данных первого ЦАП соединен с выходом первого цифрового инвертора знака числового кода, вход данных второго ЦАП соединен с цифровым выходом цифрового формирователя цифрового зондирующего сигнала, с которым соединен также вход данных первого цифрового инвертора знака числового кода, вход управления первого цифрового инвертора знака числового кода соединен с выходом формирователя бинарной ПСП, к которому подсоединен также вход записи данных третьего ОЗУ, тактовый вход формирователя бинарной ПСП соединен с первым выходом контроллера, шина чтения первого ОЗУ соединена с входом данных второго управляемого цифрового инвертора знака числового кода, а шина чтения второго ОЗУ соединена с входом данных третьего управляемого цифрового инвертора знака числового кода, выход второго управляемого цифрового инвертора знака числового кода соединен с входом третьего ТФ, выход третьего управляемого цифрового инвертора знака числового кода соединен с входом четвертого ТФ, входы управления второго и третьего управляемых цифровых инверторов знака числового кода соединены с выходом данных третьего ОЗУ, выход опорного генератора соединен с входом синхронизации второго ЦАП, к единой шине управления контроллера подсоединен вход управления третьего ОЗУ.
Технический результат достигается также за счет того, что в устройстве оценки КМОР РЛ объектов, содержащем антенну полного поляризационного приема-передачи ЭМ сигнала, ПР, первый и второй Y-циркуляторы, первый и второй цифровые приемники, первый усилитель мощности СВЧ, ЦАП, формирователь цифрового зондирующего сигнала, первое и второе ОЗУ, контроллер, опорный генератор, первый и второй ТФ, при этом вход антенны полного поляризационного приема-передачи ЭМ сигнала соединен с выходом ПР, первый вход ПР соединен с первым входом первого Y-циркулятора, а второй вход ПР соединен с первым входом второго Y-циркулятора, второй вход первого Y-циркулятора соединен с сигнальным СВЧ входом первого цифрового приемника, второй вход второго Y-циркулятора соединен с сигнальным СВЧ входом второго цифрового приемника, вход первого усилителя мощности СВЧ соединен с выходом ЦАП, вход данных ЦАП соединен с выходом формирователя цифрового зондирующего сигнала, выходная шина данных первого цифрового приемника соединена с шиной записи первого ОЗУ, выходная шина данных второго цифрового приемника соединена с шиной записи второго ОЗУ, шина чтения первого ОЗУ соединена с входом первого ТФ, шина чтения второго ОЗУ соединена с входом второго ТФ, выход опорного генератора соединен с входами синхронизации первого и второго цифровых приемников, ЦАП, контроллера и формирователя цифрового зондирующего сигнала, к единой шине управления контроллера подсоединены входы управления первого и второго цифровых приемников, первого, второго ОЗУ, а также формирователя цифрового зондирующего сигнала, согласно предложенному решению, дополнительно введены второй усилитель мощности СВЧ, управляемый аналоговый инвертор, формирователь бинарной ПСП, третье ОЗУ, первый и второй управляемые цифровые инверторы знака числового кода, третий и четвертый ТФ, при этом третий вход первого Y-циркулятора соединен с выходом первого усилителя мощности СВЧ, третий вход второго Y-циркулятора соединен с выходом второго усилителя мощности СВЧ, к выходу ЦАП подсоединен вход СВЧ управляемого аналогового инвертора, к выходу которого присоединен вход второго усилителя мощности СВЧ, вход управления управляемого аналогового инвертора соединен с выходом формирователя бинарной ПСП, к которому подсоединен также вход записи данных третьего ОЗУ, тактовый вход формирователя бинарной ПСП соединен с первым выходом контроллера, вход данных первого управляемого цифрового инвертора знака числового кода подсоединен также к шине чтения первого ОЗУ, вход данных второго управляемого цифрового инвертора знака числового кода подсоединен также к шине чтения второго ОЗУ, выход первого управляемого цифрового инвертора знака числового кода соединен с входом третьего ТФ, выход второго управляемого цифрового инвертора знака числового кода соединен с входом четвертого ТФ, входы управления первого и второго управляемых цифровых инверторов знака числового кода соединены с шиной чтения данных третьего ОЗУ, а вход управления третьего ОЗУ подсоединен к единой шине управления контроллера.
Заявленная группа изобретений взаимосвязана настолько, что образует единый творческий замысел, а значит, удовлетворяет требованию единства.
Заявляемая группа изобретений поясняется рисунками, где на фиг. 1 представлены временные диаграммы модулей комплексных огибающих сигналов  ортогональных по поляризации компонент зондирующего векторного сигнала излучения
ортогональных по поляризации компонент зондирующего векторного сигнала излучения  прототипа, на фиг. 2 - временные диаграммы модулей комплексных огибающих сигналов
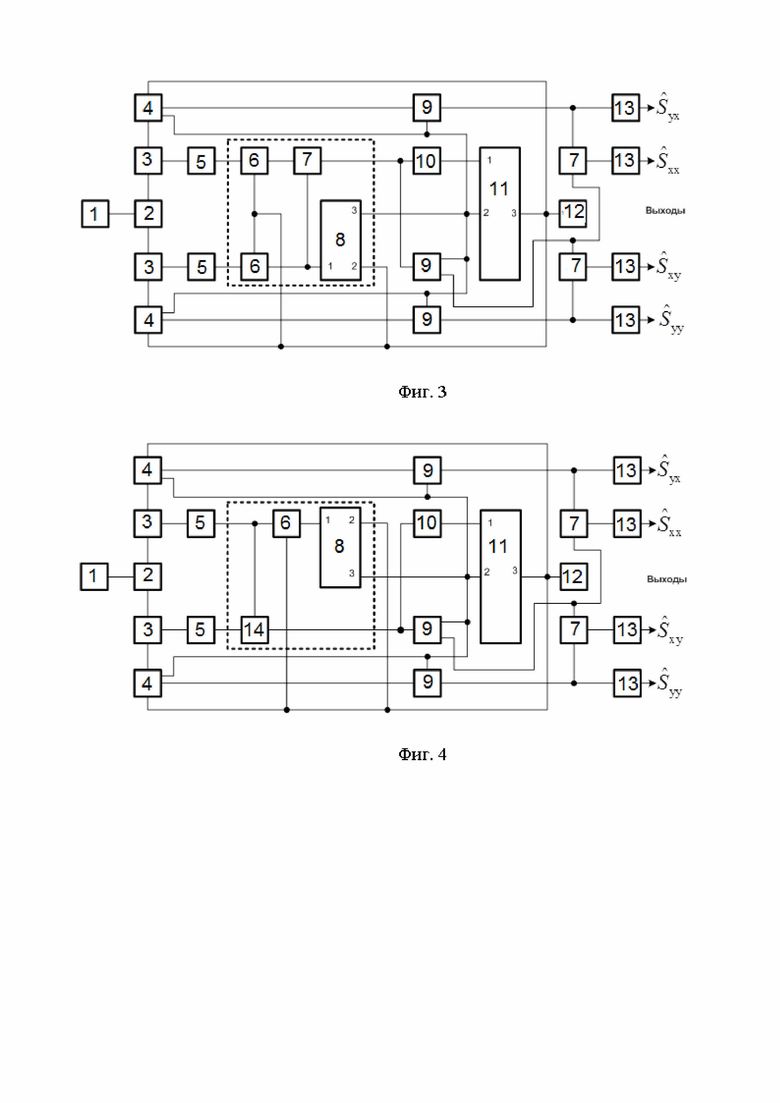
прототипа, на фиг. 2 - временные диаграммы модулей комплексных огибающих сигналов  ортогональных по поляризации компонент зондирующего векторного сигнала излучения е0 заявляемого способа, на фиг. 3, фиг. 4 - функциональные схемы устройств (вариант 1 и вариант 2, соответственно), реализующих заявляемый способ.
ортогональных по поляризации компонент зондирующего векторного сигнала излучения е0 заявляемого способа, на фиг. 3, фиг. 4 - функциональные схемы устройств (вариант 1 и вариант 2, соответственно), реализующих заявляемый способ.
Краткое описание чертежей
Устройство оценки комплексной матрицы обратного рассеяния радиолокационных объектов (вариант 1, фиг. 3) содержит антенну полного поляризационного приема-передачи ЭМ сигнала 1, ПР 2, первый и второй Y-циркуляторы 3, первый и второй цифровые приемники 4, первый и второй усилители мощности СВЧ 5, первый и второй ЦАП 6, первый, второй и третий управляемые цифровые инверторы знака числового кода 7, формирователь цифрового зондирующего сигнала 8, первое, второе и третье ОЗУ 9, формирователь бинарной ПСП 10, контроллер 11, опорный генератор 12, первый, второй, третий и четвертый ТФ 13.
Вход антенны полного поляризационного приема-передачи ЭМ сигнала 1 соединен с выходом ПР 2, первый и второй входы которого соединены с первыми входами первого и второго Y-циркуляторов 3, соответственно. Вторые входы первого и второго Y-циркуляторов 3 соединены с сигнальными СВЧ входами первого и второго цифровых приемников 4, соответственно. Третий вход первого Y-циркулятора 3 соединен с выходом первого усилителя мощности СВЧ 5, третий вход второго Y-циркулятора 3 соединен с выходом второго усилителя мощности СВЧ 5.
Вход первого усилителя мощности СВЧ 5 соединен с выходом первого ЦАП 6, вход второго усилителя мощности СВЧ 5 соединен с выходом второго ЦАП 6.
Вход данных первого ЦАП 6 соединен с выходом первого цифрового инвертора знака числового кода 7. Вход данных второго ЦАП 6 соединен с цифровым выходом цифрового формирователя цифрового зондирующего сигнала 8, с которым соединен также вход данных первого цифрового инвертора знака числового кода 7.
Вход управления первого цифрового инвертора знака числового кода 7 соединен с выходом формирователя бинарной ПСП 10, к которому подсоединен также вход записи данных третьего ОЗУ 9. Тактовый вход формирователя бинарной ПСП 10 соединен с первым выходом контроллера 11. Выходная шина данных первого цифрового приемника 4 соединена с шиной записи первого ОЗУ 9, выходная шина данных второго цифрового приемника 4 соединена с шиной записи второго ОЗУ 9.
Шина чтения первого ОЗУ 9 соединена с входом данных второго управляемого цифрового инвертора знака числового кода 7, а также с входом первого ТФ 13. Шина чтения второго ОЗУ 9 соединена с входом данных третьего управляемого цифрового инвертора знака числового кода 7, а также с входом второго ТФ 13.
Выход данных второго управляемого цифрового инвертора знака числового кода 7 соединен с входом третьего ТФ 13. Выход данных третьего управляемого цифрового инвертора знака числового кода 7 соединен с входом четвертого ТФ 13.
Входы управления второго и третьего управляемых цифровых инверторов знака числового кода 7 соединены с выходом данных третьего ОЗУ 9.
Выход опорного генератора 12 соединен с входами синхронизации первого и второго цифровых приемников 4, входами синхронизации первого и второго ЦАП 6, входами синхронизации контроллера 11 и формирователя цифрового зондирующего сигнала 8. К единой шине управления контроллера 11 подсоединены входы управления первого и второго цифровых приемников 4, первого, второго и третьего ОЗУ 9, а также формирователя цифрового зондирующего сигнала 8.
Устройство оценки КМОР РЛ объектов (вариант 2, фиг. 4) содержит антенну полного поляризационного приема-передачи ЭМ сигнала 1, ПР 2, первый и второй Y-циркуляторы 3, первый и второй цифровые приемники 4, первый и второй усилители мощности СВЧ 5, управляемый аналоговый инвертор 14, ЦАП 6, формирователь цифрового зондирующего сигнала 8, первое, второе и третье ОЗУ 9, формирователь бинарной ПСП 10, контроллер 11, опорный генератор 12, первый и второй управляемые цифровые инверторы знака числового кода 7, первый, второй, третий и четвертый ТФ 13.
При этом вход антенны полного поляризационного приема-передачи ЭМ сигнала 1 соединен с выходом ПР 2, первый вход ПР 2 соединен с первым входом первого Y-циркулятора 3, а второй вход ПР 2 соединен с первым входом второго Y-циркулятора 3.
Второй вход первого Y-циркулятора 3 соединен с сигнальным СВЧ входом первого цифрового приемника 4, второй вход второго Y-циркулятора 3 соединен с сигнальным СВЧ входом второго цифрового приемника 4. Третий вход первого Y-циркулятора 3 соединен с выходом первого усилителя мощности СВЧ 5, третий вход второго Y-циркулятора 3 соединен с выходом второго усилителя мощности СВЧ 5.
Вход первого усилителя мощности СВЧ 5 соединен с выходом ЦАП 6 и входом СВЧ управляемого аналогового инвертора 14. Вход второго усилителя мощности СВЧ 5 соединен с выходом управляемого аналогового инвертора 14. Вход данных ЦАП 6 соединен с цифровым выходом формирователя цифрового зондирующего сигнала 8, вход управления управляемого аналогового инвертора 14 соединен с выходом формирователя бинарной ПСП 10, и со входом записи данных третьего ОЗУ 9. Тактовый вход формирователь бинарной ПСП 10 соединен с первым выходом контроллера 11.
Выходная шина данных первого цифрового приемника 4 соединена с шиной записи первого ОЗУ 9, выходная шина данных второго цифрового приемника 4 соединена с шиной записи второго ОЗУ 9.
Шина чтения первого ОЗУ 9 соединена с входом данных первого управляемого цифрового инвертора знака числового кода 7, а также с входом первого ТФ 13. Шина чтения второго ОЗУ 9 соединена с входом данных второго управляемого цифрового инвертора знака числового кода 7, а также с входом второго ТФ 13. Выход первого управляемого цифрового инвертора знака числового кода 7 соединен с входом третьего ТФ 13, выход второго управляемого цифрового инвертора знака числового кода 7 соединен с входом четвертого ТФ 13. Входы управления первого и второго управляемых цифровых инверторов знака числового кода 7 соединены с шиной чтения данных третьего ОЗУ 9. Выход опорного генератора 12 соединен с входами синхронизации первого и второго цифровых приемников 4, ЦАП 6, контроллера 11 и формирователя цифрового зондирующего сигнала 8. К единой шине управления контроллера 11 подсоединены входы управления первого и второго цифровых приемников 4, первого, второго и третьего ОЗУ 9, а также формирователя цифрового зондирующего сигнала 8.
Осуществление группы изобретений
Заявленный способ реализуется при помощи двух вариантов устройств следующим образом
Устройство оценки КМОР РЛ объектов (вариант 1, фиг. 3.) функционирует следующим образом.
Устройством непрерывно периодически цифровым методом формируется периодический зондирующий векторный сигнал, это происходит следующим образом. Синхронизируемые опорным генератором 12 формирователь цифрового зондирующего сигнала 8 и управляющий им контроллер 11 формируют периодически повторяющийся цифровой зондирующий сигнал, который является последовательностью цифровых кодов, описывающих мгновенные отсчеты комплексной огибающей периодического (с периодом Т) радиоимпульсного зондирующего радиолокационного сигнала  Начало зондирующего сигнала соответствует началу очередного цикла (периода) зондирования, имеющего длительность Т0. Синхронно с формированием цифрового зондирующего сигнала с помощью формирователя бинарной ПСП 10, тактируемого специальным управляющим сигналом, привязанным к началу цикла зондирования и формируемым контроллером 11, формируется бинарная ПСП П(t), описывающая своими кодами 1 и 0 принимаемые значения 1 или -1, соответственно, равновероятные на временном интервале синтезирования апертуры РСА TC.
Начало зондирующего сигнала соответствует началу очередного цикла (периода) зондирования, имеющего длительность Т0. Синхронно с формированием цифрового зондирующего сигнала с помощью формирователя бинарной ПСП 10, тактируемого специальным управляющим сигналом, привязанным к началу цикла зондирования и формируемым контроллером 11, формируется бинарная ПСП П(t), описывающая своими кодами 1 и 0 принимаемые значения 1 или -1, соответственно, равновероятные на временном интервале синтезирования апертуры РСА TC.
Цифровой зондирующий сигнал, сформированный формирователем 8, поступает на вход второго ЦАП 6 непосредственно, а на вход первого ЦАП 6 после обработки цифровым инвертором знака числового кода 7, управляемым кодом ПСП с выхода формирователя бинарной ПСП 10. В результате на выходах ЦАП 6 формируются два скалярных ортогональных по поляризации сигнала (компоненты)  векторного зондирующего сигнала
векторного зондирующего сигнала  при этом
при этом 
ЦАП 6 могут быть с непосредственным формированием СВЧ сигнала, с прямым преобразованием кода или его интерполяцией, либо, при формировании на промежуточной частоте, содержать дополнительные конверторы вверх по частоте и единый для обоих каналов вспомогательный СВЧ гетеродин.
Эти два сигнала  с выходов ЦАП 6 усиливаются усилителями мощности СВЧ 5 и через третьи входы Y-циркуляторов 3 поступают на входы ПР 2, круглый волноводный выход которого подсоединен к входу антенны полного поляризационного приема-передачи ЭМ сигнала 1.
с выходов ЦАП 6 усиливаются усилителями мощности СВЧ 5 и через третьи входы Y-циркуляторов 3 поступают на входы ПР 2, круглый волноводный выход которого подсоединен к входу антенны полного поляризационного приема-передачи ЭМ сигнала 1.
В результате на выходе антенны 1 формируется векторный сигнал е0, описываемый выражением
где:  - комплексная огибающая периодического (с периодом зондирования Т0) импульсного выходного сигнала цифрового формирователя (см. фиг. 2), причем для простоты считаем, что мощность сигнала, т.е.
- комплексная огибающая периодического (с периодом зондирования Т0) импульсного выходного сигнала цифрового формирователя (см. фиг. 2), причем для простоты считаем, что мощность сигнала, т.е. 
П(t) - бинарная функция, принимающая равновероятные значения 1 или -1 на временном интервале синтезирования РСА ТС;
Из выражения (2) следует, что огибающие  векторного сигнала излучения е0 идентичны по форме и частотно временной структуре и отличаются только начальной фазой, при этом фаза составляющей
векторного сигнала излучения е0 идентичны по форме и частотно временной структуре и отличаются только начальной фазой, при этом фаза составляющей  меняется относительно фазы составляющей
меняется относительно фазы составляющей  от импульса к импульсу случайным образом, принимая равновероятно значения 0 или 180 градусов (см. фиг. 2). Манипуляция фазы огибающей
от импульса к импульсу случайным образом, принимая равновероятно значения 0 или 180 градусов (см. фиг. 2). Манипуляция фазы огибающей  производится путем смены знака цифрового кода в цифровым инверторе знака числового кода 7. При подаче 1 на управляющий вход сдвиг фазы равен 0 градусов, при подаче 0 сдвиг фазы входного сигнала
производится путем смены знака цифрового кода в цифровым инверторе знака числового кода 7. При подаче 1 на управляющий вход сдвиг фазы равен 0 градусов, при подаче 0 сдвиг фазы входного сигнала  равен 180 градусов. Бинарный сигнал управления цифровым инвертором знака числового кода формируется в формирователе бинарной ПСП 10, представляющем собой датчик случайной бинарной последовательности, реализуемый, например, по известной схеме на сдвиговом регистре с обратной связью с элементами «исключающее ИЛИ», тактируемого сигналом с выхода 1 управляющего контроллера 11, совпадающего с моментом запуска формирователя цифрового сигнала излучения.
равен 180 градусов. Бинарный сигнал управления цифровым инвертором знака числового кода формируется в формирователе бинарной ПСП 10, представляющем собой датчик случайной бинарной последовательности, реализуемый, например, по известной схеме на сдвиговом регистре с обратной связью с элементами «исключающее ИЛИ», тактируемого сигналом с выхода 1 управляющего контроллера 11, совпадающего с моментом запуска формирователя цифрового сигнала излучения.
В каждом цикле РЛ зондирования длительностью Т0 векторный зондирующий сигнал е0 облучает РЛ объект или их совокупность, которые переизлучают отраженный сигнал ер, описываемый выражением

где:  - комплексная матрица обратного рассеяния элемента разрешения зондируемого пространства;
- комплексная матрица обратного рассеяния элемента разрешения зондируемого пространства;
Li(t)=ejϕ(t) - траекторная функция, которая учитывает изменение фазы сигнала излучения во время движения носителя и для каждого i-ого элемента разрешения РСА определяется его дальностью, скоростью носителя, рабочей частотой сигнала излучения и углом визирования (относительно вектора скорости носителя) [4];
ti - время задержки сигнала, отраженного от i-ого элемента разрешения по дальности, относительно момента излучения сигнала 
Векторный отраженный ЭМ сигнал eP принимается той же антенной 1 и с ее круглого волноводного выхода поступает на вход ПР 2, с выходов которого ортогональные по поляризации составляющие  этого сигнала поступают на первые входы Y- циркуляторов 3, со вторых выходов которых поступают на входы первого и второго цифровых приемников 4, соответственно. В цифровых приемниках 4 производится фильтрация, согласованная с комплексной огибающей
этого сигнала поступают на первые входы Y- циркуляторов 3, со вторых выходов которых поступают на входы первого и второго цифровых приемников 4, соответственно. В цифровых приемниках 4 производится фильтрация, согласованная с комплексной огибающей  излученного сигнала e0. (см. выражение 2). Обычно в РСА комплексная огибающая
излученного сигнала e0. (см. выражение 2). Обычно в РСА комплексная огибающая  описывает линейный частотно-модулированный (ЛЧМ) сигнал, сложный радиосигнал с линейным изменением частоты внутри радиоимпульса. Это позволяет существенно повысить потенциал РСА при сохранении высокой разрешающей способности по дальности. В общем виде составляющие векторного сигнала
описывает линейный частотно-модулированный (ЛЧМ) сигнал, сложный радиосигнал с линейным изменением частоты внутри радиоимпульса. Это позволяет существенно повысить потенциал РСА при сохранении высокой разрешающей способности по дальности. В общем виде составляющие векторного сигнала  отраженного от i-ого элемента разрешения по дальности, на выходе приемников 4 можем записать как
отраженного от i-ого элемента разрешения по дальности, на выходе приемников 4 можем записать как
где: g(t) - импульсная характеристика согласованного с сигналом 
ti - время задержки отраженного сигнала от объекта, расположенного в i-ом стробе дальности, относительно момента излучения;
B(t-ti) - отклик («сжатый» сигнал) согласованного фильтра на сигнал 
* - знак временной свертки.
Выходные сигналы  приемников 4 являются цифровыми, т.е. представляют собой последовательности кодов, описывающих мгновенные значения их комплексных огибающих. Цифровые сигналы с выходов цифровых приемников 4, сформированные в каждом периоде РЛ зондирования длительностью Т0, последовательно сохраняются в первом и втором ОЗУ 9, формируя в них на интервале синтезирования РСА длительностью Тс двумерные массивы РЛ отклика. При этом каждому очередному циклу зондирования длительностью Т0 соответствует строка двумерного массива.
приемников 4 являются цифровыми, т.е. представляют собой последовательности кодов, описывающих мгновенные значения их комплексных огибающих. Цифровые сигналы с выходов цифровых приемников 4, сформированные в каждом периоде РЛ зондирования длительностью Т0, последовательно сохраняются в первом и втором ОЗУ 9, формируя в них на интервале синтезирования РСА длительностью Тс двумерные массивы РЛ отклика. При этом каждому очередному циклу зондирования длительностью Т0 соответствует строка двумерного массива.
Синхронно с записью откликов в первое и второе ОЗУ 9 в третьем ОЗУ 9 фиксируются код ПСП. Причем если для каждого периода зондирования длительностью Т0, в ОЗУ 9, содержится совокупность многоразрядных коды, представляющие собой комплексные числа, описывающие мгновенные отсчеты комплексных огибающих сигналов  то в третьем ОЗУ 9 каждому периоду T0 соответствует одноразрядный код, описывающий текущее для данного периода Т0 значение кода ПСП.
то в третьем ОЗУ 9 каждому периоду T0 соответствует одноразрядный код, описывающий текущее для данного периода Т0 значение кода ПСП.
При достижении совокупностью из n периодов зондирования Т0, длительности ТС=nT0 возможно начинать радиоголографическую фокусировку РЛ изображений (синтезирование). При этом цифровые сигналы  с выходов первого и второго ОЗУ 9 загружаются в первый и четвертый ТФ 13 непосредственно, а перед загрузкой во второй и третий ТФ 13 подвергаются фазовой манипуляции, которая сводится к смене знака цифрового кода во втором и третьем управляемых цифровых инверторах знака числового кода 7 под управлением данных о ПСП (П(t)), хранимых и извлекаемых при синтезировании из третьего ОЗУ 9.
с выходов первого и второго ОЗУ 9 загружаются в первый и четвертый ТФ 13 непосредственно, а перед загрузкой во второй и третий ТФ 13 подвергаются фазовой манипуляции, которая сводится к смене знака цифрового кода во втором и третьем управляемых цифровых инверторах знака числового кода 7 под управлением данных о ПСП (П(t)), хранимых и извлекаемых при синтезировании из третьего ОЗУ 9.
В результате в четыре ТФ 13 загружаются четыре сигнала 
 соответственно, в которых они обрабатываются. Учитывая выражение для матрицы М в (3), выражения для входных сигналов ТФ имеют вид:
соответственно, в которых они обрабатываются. Учитывая выражение для матрицы М в (3), выражения для входных сигналов ТФ имеют вид:
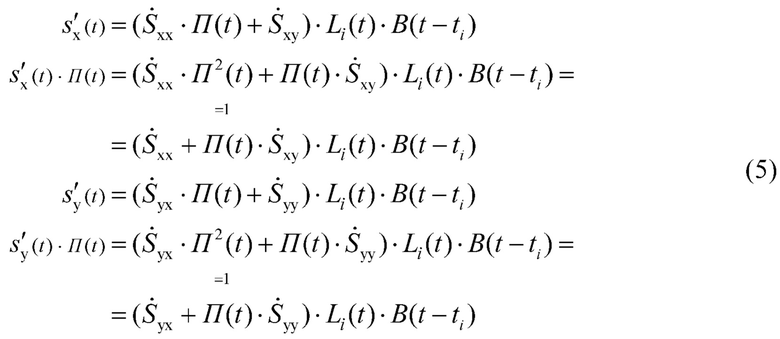
В ТФ 13 в каждом i-ом стробе дальности производится согласованная с траекторной функцией Li(t) фильтрация последовательности из n отсчетов значений сигналов (5), результатом такой обработки по каждому зондирующему сигналу формируются четыре комплексные величины:
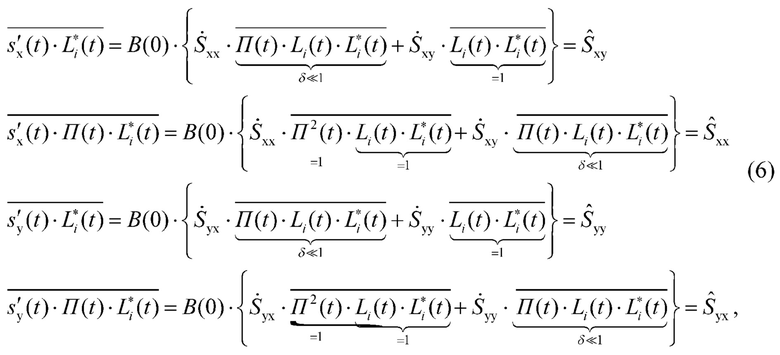
где B(0) - значение функции отклика B(t) согласованного фильтра приемника в точке t=tj. Траекторные функции Lt(t) для прямолинейного движения РСА имеет вид функций Френеля.
Как это следует из выражений (6), совокупность выходных сигналов ТФ являются корректной оценкой КМОР, причем относительная точность оценки определяется количеством отсчетов сигналов. Чем больше число n этих отсчетов, тем точнее оценка КМОР. Относительная точность (без учета собственных шумов приемника) определяется величиной

Число n в РСА определяется частотой повторения зондирующего сигнала, скоростью движения носителя и длиной траекторной функции. Для характерных значений n=5÷20⋅103 [9,12], относительная точность оценки КМОР (без учета влияния объектов в соседних стробах разрешения) составляет величину ~ 
Отметим, что для случая нулевой скорости носителя (обычная РЛС) траекторная функция равна константе Li(t)=const и ТФ выполняет функцию вычисления среднего значения последовательности из n отсчетов значений сигналов. Это означает, что данный способ оценки КМОР применим и для неподвижных РЛС, когда время наблюдения объекта позволяет произвести n зондирований.
Отметим также, что поскольку бинарная функция П(t) непериодическая, со случайными равновероятными значениями -1 и 1, скорость носителя такая же, как и у обычной РСА с периодом повторения зондирующего сигнала Т. Это обусловлено тем, что при больших значениях n для любых Li(t)≠П(t) в выражении (6) выполняется соотношение

Влияние на точность оценки КМОР «больших» объектов практически устраняется использованием, например, окна Блэкмана [13,14] при согласованной обработке импульсного сигнала в приемнике. Первый боковой лепесток функции отклика такого фильтра на ЛЧМ сигнал может быть подавлен на ψ=-80 дБ, а второй и дальние боковые лепестки будут подавлены до уровня ψ=-90 дБ и более. Это позволяет практически устранить влияние «больших» объектов на оценку КМОР «малых» объектов при различии величины их ЭПР до α=60 дБ. При этом относительная точность оценки КМОР «малых» объектов будет не хуже величины -ψ+α=30 дБ, что вполне достаточно для практических применений. Отметим, что весовая оконная обработка в способе-аналоге практически не повышает уровень взаимной развязки ортогональных сигналов, и не позволяет уменьшить ошибки в оценке КМОР.
По мере движения РСА (или при обработке после измерительного полета по результатам РЛ съемки, сохраненных в ОЗУ 9) в ТФ 13 добавляются новые строки, уже прошедшие обработку строки постепенно отбрасываются и в результате на выходах ТФ 13 устройства по варианту 1 формируются четверки строк, каждому i-му элементу разрешения по дальности соответствует четыре комплексных элемента  образующие комплексную матрицу обратного рассеяния Mi для i-го элемента разрешения по дальности.
образующие комплексную матрицу обратного рассеяния Mi для i-го элемента разрешения по дальности.
Взаимная когерентность формируемых сигналов излучения и приема заявляемого устройства по варианту 1 обеспечивается тактированием всех цифровых узлов от единого опорного генератора 12. Управление узлам при зондировании и синтезировании осуществляется по совмещенной шине управления от контроллера 11.
Устройство оценки комплексной матрицы обратного рассеяния радиолокационных объектов (вариант 2, фиг. 4) функционирует следующим образом.
Устройством непрерывно периодически цифровым методом формируется периодический зондирующий векторный сигнал, это происходит следующим образом. Синхронизируемые опорным генератором 12 формирователь цифрового зондирующего сигнала 8 и управляющий им контроллер 11 формируют периодически повторяющийся цифровой зондирующий сигнал, который является последовательностью цифровых кодов, описывающих мгновенные отсчеты комплексной огибающей периодического (с периодом Т) радиоимпульсного зондирующего радиолокационного сигнала  Начало зондирующего сигнала соответствует началу очередного цикла (периода) зондирования, имеющего длительность Т0. Синхронно с формированием цифрового зондирующего сигнала с помощью формирователя бинарной ПСП 10, тактируемого специальным управляющим сигналом, привязанным к началу цикла зондирования и формируемым контроллером 11, формируется бинарная ПСП П(t), описывающая своими кодами 1 и 0 принимаемые значения 1 или -1, соответственно, равновероятные на временном интервале синтезирования апертуры РСА ТС.
Начало зондирующего сигнала соответствует началу очередного цикла (периода) зондирования, имеющего длительность Т0. Синхронно с формированием цифрового зондирующего сигнала с помощью формирователя бинарной ПСП 10, тактируемого специальным управляющим сигналом, привязанным к началу цикла зондирования и формируемым контроллером 11, формируется бинарная ПСП П(t), описывающая своими кодами 1 и 0 принимаемые значения 1 или -1, соответственно, равновероятные на временном интервале синтезирования апертуры РСА ТС.
Цифровой зондирующий сигнал, сформированный формирователем 8, поступает на вход ЦАП 6, а с его выхода на вход управляемого аналогового инвертора 14, управляемого кодом ПСП с выхода бинарного формирователя ПСП 10. В результате на выходах ЦАП 6 формируются два скалярных ортогональных по поляризации сигнала (компоненты)  векторного зондирующего сигнала
векторного зондирующего сигнала  при этом
при этом 
ЦАП 6 может быть с непосредственным формированием СВЧ сигнала, с прямым преобразованием кода или его интерполяцией, либо, при формировании на промежуточной частоте, содержать дополнительные конверторы вверх по частоте и единый для обоих каналов вспомогательный СВЧ гетеродин.
Два сигнала  с выходов ЦАП 6 и управляемого аналогового инвертора 14 усиливаются усилителями мощности СВЧ 5 и через третьи входы Y-циркуляторов 3 поступают на входы ПР 2, круглый волноводный выход которого подсоединен к входу антенны полного поляризационного приема-передачи ЭМ сигнала 1.
с выходов ЦАП 6 и управляемого аналогового инвертора 14 усиливаются усилителями мощности СВЧ 5 и через третьи входы Y-циркуляторов 3 поступают на входы ПР 2, круглый волноводный выход которого подсоединен к входу антенны полного поляризационного приема-передачи ЭМ сигнала 1.
В результате на выходе антенны 1 формируется векторный сигнал е0, описываемый выражением

где:  - комплексная огибающая периодического (с периодом зондирования Т0) импульсного выходного сигнала цифрового формирователя (см. фиг. 2), причем для простоты считаем, что мощность сигнала, т.е.
- комплексная огибающая периодического (с периодом зондирования Т0) импульсного выходного сигнала цифрового формирователя (см. фиг. 2), причем для простоты считаем, что мощность сигнала, т.е. 
П(t) - бинарная функция, принимающая равновероятные значения 1 или -1 на временном интервале синтезирования РСА ТС;
Из выражения (2) следует, что огибающие  векторного сигнала излучения е0 идентичны по форме и частотно временной структуре и отличаются только начальной фазой, при этом фаза составляющей
векторного сигнала излучения е0 идентичны по форме и частотно временной структуре и отличаются только начальной фазой, при этом фаза составляющей  меняется относительно фазы составляющей
меняется относительно фазы составляющей  от импульса к импульсу случайным образом, принимая равновероятно значения о или 180 градусов (см. фиг. 2). Манипуляция фазы огибающей
от импульса к импульсу случайным образом, принимая равновероятно значения о или 180 градусов (см. фиг. 2). Манипуляция фазы огибающей  на 180 градусов производится под воздействием бинарного модулирующего сигнала на вход управления управляемого аналогового инвертора 14. При подаче логической 1 на управляющий вход модулятора вносимый им сдвиг фазы равен 0 градусов, при подаче логического 0 дополнительный сдвиг фазы, вносимый управляемым аналоговым инвертором 14 в его входной сигнала
на 180 градусов производится под воздействием бинарного модулирующего сигнала на вход управления управляемого аналогового инвертора 14. При подаче логической 1 на управляющий вход модулятора вносимый им сдвиг фазы равен 0 градусов, при подаче логического 0 дополнительный сдвиг фазы, вносимый управляемым аналоговым инвертором 14 в его входной сигнала  равен 180 градусов. Бинарный сигнал управления управляемым аналоговым инвертором 14 формируется в формирователе бинарной ПСП 10, представляющем собой датчик случайной бинарной последовательности, реализуемый, например, по известной схеме на сдвиговом регистре с обратной связью с элементами «исключающее ИЛИ», тактируемого сигналом с выхода 1 управляющего контроллера 11, совпадающего с моментом запуска формирователя цифрового сигнала излучения.
равен 180 градусов. Бинарный сигнал управления управляемым аналоговым инвертором 14 формируется в формирователе бинарной ПСП 10, представляющем собой датчик случайной бинарной последовательности, реализуемый, например, по известной схеме на сдвиговом регистре с обратной связью с элементами «исключающее ИЛИ», тактируемого сигналом с выхода 1 управляющего контроллера 11, совпадающего с моментом запуска формирователя цифрового сигнала излучения.
В каждом цикле радиолокационного зондирования длительностью Т0 векторный зондирующий сигнал е0 облучает радиолокационный (РЛ) объект или их совокупность, которые переизлучают отраженный сигнал eP, описываемый выражением

где:  - комплексная матрица обратного рассеяния элемента разрешения зондируемого пространства;
- комплексная матрица обратного рассеяния элемента разрешения зондируемого пространства;
Li(t)=ejϕ(t) - траекторная функция, учитывает изменение фазы сигнала излучения во время движения носителя и для каждого i-ого элемента разрешения РСА определяется его дальностью, скоростью носителя, рабочей частотой сигнала излучения и углом визирования (относительно вектора скорости носителя) [4];
ti - время задержки сигнала, отраженного от i-ого элемента разрешения по дальности, относительно момента излучения сигнала 
Векторный отраженный ЭМ сигнал eP принимается той же антенной 1 и с ее круглого волноводного выхода поступает на вход ПР 2, с выходов которого ортогональные по поляризации составляющие  этого сигнала поступают на первые входы Y - циркуляторов 3, со вторых выходов которых поступают на входы первого и второго цифровых приемников 4, соответственно. В цифровых приемниках 4 производится фильтрация, согласованная с комплексной огибающей
этого сигнала поступают на первые входы Y - циркуляторов 3, со вторых выходов которых поступают на входы первого и второго цифровых приемников 4, соответственно. В цифровых приемниках 4 производится фильтрация, согласованная с комплексной огибающей  излученного сигнала е0. (см. выражение 2). Обычно в РСА комплексная огибающая
излученного сигнала е0. (см. выражение 2). Обычно в РСА комплексная огибающая  описывает ЛЧМ-сигнал, сложный радиосигнал с линейным изменение частоты внутри радиоимпульса. Это позволяет существенно повысить потенциал РСА при сохранении высокой разрешающей способности по дальности. В общем виде, составляющие векторного сигнала
описывает ЛЧМ-сигнал, сложный радиосигнал с линейным изменение частоты внутри радиоимпульса. Это позволяет существенно повысить потенциал РСА при сохранении высокой разрешающей способности по дальности. В общем виде, составляющие векторного сигнала  отраженного от i-ого элемента разрешения по дальности, на выходе цифровых приемников 4 можем записать как
отраженного от i-ого элемента разрешения по дальности, на выходе цифровых приемников 4 можем записать как
где: g(t) - импульсная характеристика согласованного с сигналом 
ti - время задержки отраженного сигнала от объекта, расположенного в i-ом стробе дальности, относительно момента излучения;
B(t-ti) - отклик («сжатый» сигнал) согласованного фильтра на сигнал 
* - знак временной свертки.
Выходные сигналы  приемников 4 являются цифровыми, т.е. представляют собой последовательности кодов, описывающих мгновенные значения их комплексных огибающих. Цифровые сигналы с выходов цифровых приемников 4, сформированные в каждом периоде РЛ зондирования длительностью Т0, последовательно сохраняются в первом и втором ОЗУ 9, формируя в них на интервале синтезирования РСА длительностью ТС двумерные массивы РЛ отклика. При этом каждому очередному циклу зондирования длительностью Т0 соответствует строка двумерного массива.
приемников 4 являются цифровыми, т.е. представляют собой последовательности кодов, описывающих мгновенные значения их комплексных огибающих. Цифровые сигналы с выходов цифровых приемников 4, сформированные в каждом периоде РЛ зондирования длительностью Т0, последовательно сохраняются в первом и втором ОЗУ 9, формируя в них на интервале синтезирования РСА длительностью ТС двумерные массивы РЛ отклика. При этом каждому очередному циклу зондирования длительностью Т0 соответствует строка двумерного массива.
Синхронно с записью откликов в первое и второе ОЗУ 9 в третьем ОЗУ 9 фиксируются код ПСП. Причем если для каждого периода зондирования длительностью Т0, в ОЗУ 9, содержится совокупность многоразрядных кодов, представляющих собой комплексные числа, описывающие мгновенные отсчеты комплексных огибающих сигналов  то в третьем ОЗУ 9 каждому периоду Т0 соответствует одноразрядный код, описывающий текущее для данного периода Т0 значение кода ПСП.
то в третьем ОЗУ 9 каждому периоду Т0 соответствует одноразрядный код, описывающий текущее для данного периода Т0 значение кода ПСП.
При достижении совокупностью из n периодов зондирования Т0, длительности ТС=nT0 возможно начинать радиоголографическую фокусировку РЛ изображений (синтезирование). При этом цифровые сигналы  с выходов первого и второго ОЗУ 9 загружаются в первый и второй ТФ 13 непосредственно, а перед загрузкой в третий и четвертый ТФ 13 подвергаются фазовой манипуляции, которая сводится к смене знака цифрового кода в первом и втором управляемых цифровых инверторах знака числового кода 7 под управлением данных о ПСП (П(t)), хранимых и извлекаемых при синтезировании из третьего ОЗУ 9.
с выходов первого и второго ОЗУ 9 загружаются в первый и второй ТФ 13 непосредственно, а перед загрузкой в третий и четвертый ТФ 13 подвергаются фазовой манипуляции, которая сводится к смене знака цифрового кода в первом и втором управляемых цифровых инверторах знака числового кода 7 под управлением данных о ПСП (П(t)), хранимых и извлекаемых при синтезировании из третьего ОЗУ 9.
В результате в четыре ТФ 13 загружаются четыре сигнала 
 соответственно, в которых они обрабатываются. Учитывая выражение для матрицы М в (3), выражения для входных сигналов ТФ имеют вид:
соответственно, в которых они обрабатываются. Учитывая выражение для матрицы М в (3), выражения для входных сигналов ТФ имеют вид:
В ТФ 13 в каждом i-ом стробе дальности производится согласованная с траекторной функцией Li(t) фильтрация последовательности из n отсчетов значений сигналов (5), результатом такой обработки по каждому зондирующему сигналу формируются четыре комплексные величины:
где В(0) - значение функции отклика B(t) согласованного фильтра приемника в точке t=ti. Траекторные функции Li(t) для прямолинейного движения РСА имеет вид функций Френеля.
Как это следует из выражений (6), совокупность выходных сигналов ТФ являются корректной оценкой КМОР, причем относительная точность оценки определяется количеством отсчетов сигналов. Чем больше число n этих отсчетов, тем точнее оценка КМОР. Относительная точность (без учета собственных шумов приемника) определяется величиной

Число n в РСА определяется частотой повторения зондирующего сигнала, скоростью движения носителя и длиной траекторной функции. Для характерных значений n=5÷20⋅103 [9,12], относительная точность оценки КМОР (без учета влияния объектов в соседних стробах разрешения) составляет величину ~ 
Отметим, что для случая нулевой скорости носителя (обычная РЛС) траекторная функция равна константе Li(t)=const и ТФ 13 выполняет функцию вычисления среднего значения последовательности из n отсчетов значений сигналов. Это означает, что данный способ оценки КМОР применим и для неподвижных РЛС, когда время наблюдения объекта позволяет произвести n зондирований.
Отметим также, что поскольку бинарная функция П(t) непериодическая, со случайными равновероятными значениями -1 и 1, скорость носителя такая же, как и у обычной РСА с периодом повторения зондирующего сигнала Т. Это обусловлено тем, что при больших значениях n для любых Li(t) ≠ П(t) в выражении (6) выполняется соотношение

Влияние на точность оценки КМОР «больших» объектов практически устраняется использованием, например, окна Блэкмана [13,14] при согласованной обработке импульсного сигнала в приемнике. Первый боковой лепесток функции отклика такого фильтра на ЛЧМ сигнал может быть подавлен на ψ = -80 дБ, а второй и дальние боковые лепестки будут подавлены до уровня ψ = -90 дБ и более. Это позволяет практически устранить влияние «больших» объектов на оценку КМОР «малых» объектов при различии величины их ЭПР до α = 60 дБ. При этом относительная точность оценки КМОР «малых» объектов будет не хуже величины -ψ+α=30 дБ, что вполне достаточно для практических применений. Отметим, что весовая оконная обработка в способе-аналоге практически не повышает уровень взаимной развязки ортогональных сигналов, и не позволяет уменьшить ошибки в оценке КМОР.
По мере движения РСА (или при обработке после измерительного полета по результатам РЛ съемки, сохраненных в ОЗУ 9) в ТФ 13 добавляются новые строки, уже прошедшие обработку строки постепенно отбрасываются и в результате на выходах ТФ 13 устройства по варианту 2 формируются четверки строк, каждому i-му элементу разрешения по дальности соответствует четыре комплексных элемента  образующие КМОР Mi для i-го элемента разрешения по дальности.
образующие КМОР Mi для i-го элемента разрешения по дальности.
Взаимная когерентность формируемых сигналов излучения и приема заявляемого устройства по варианту 2 обеспечивается тактированием всех цифровых узлов от единого опорного генератора 12. Управление узлам при зондировании и синтезировании осуществляется по совмещенной шине управления от контроллера 11.
Таким образом, поскольку в двух вариантах устройств (фиг. 3, фиг. 4) реализованы все операции над сигналами заявляемого способа, определяемые формулой изобретения, доказано, что:
1. Предлагаемый способ применим в РСА без снижения скорости обзора по сравнению с обычными, не поляриметрическими РСА;
2. Предлагаемый способ позволяет повысить точность оценки КМОР РЛ объектов в реальных условиях их наблюдения.
Литература
[1] Храбростин Б.В., Никитин В.М. Способ и устройство для измерения поляризационной матрицы рассеяния объекта. - Патент RU 2 190 239 С1, 2001 г.
[2] Внотченко С.Л., Достовалов М.Ю., Дьяков А.В., Дьяков И.В., Ермаков Р.В., Жаровская Е.П., Коваленко А.И., Мусинянц Т.Г., Нейман Л.С., Риман В.В., Суслов В.Е. Авиационные мобильные малогабаритные радиолокаторы с синтезированной апертурой семейства «Компакт» (принципы реализации и опыт применения) / III Всероссийская конференция «Радиолокация и радиосвязь» - ИРЭ РАН, 26-30 октября 2009.
[3] Внотченко С.Л., Достовалов М.Ю., Дьяков А.В и др. Авиационный четырехдиапазонный радиолокационный комплекс «КОМПАКТ» - особенности, результаты и перспективы развития. // Труды XXVIII всероссийского симпозиума «Радиолокационные исследования природных сред», Санкт-Петербург, 2013, т. 1, стр. 34-44.
[4] Радиовидение. Радиолокационные системы дистанционного зондирования Земли. Учебное пособие для вузов. // Под ред. Г.С. Кондратенкова. - М: «Радиотехника», 2005. - 368 с. ил. (Сер. Радиолокация).
[5] Хойнен. Измерение матрицы рассеяния цели. ТИИЭР, т. 53, 8, 1965, с. 1074-1084.
[6] Д.Б. Канарейкин, М.В. Павалов, В.А. Потехин Поляризация радиолокационых сигналов. М.: Сов. радио, 1966, с. 118-124, 282-293.
[7] J.-L. Suchail, С. Buck, J. Guijarro, A.Shonenberger, R.Torres. The Envisat ASAR Instrument. EUSAR'2000, Germany, pp. 33-36.
[8] L. Brule, H. Baeggli. RADARSAT-2 Program Update. System. Proc. EUSAR'2002, Germany, pp. 25-28.
[9] M. Suess, S. Riegger, W. Pitz, R. Weminghaus. TerraSAR X - Design and Performance. Proc. EUSAR'2004, Germany, pp. 49-52.
[10] R. Torres, D. Simpson. The TERRASAR-L System. Proc. EUSAR'2004, Germany, pp.41-44.
[11] T. Misra, S.S. Rana, K.N. Shankara. Synthetic aperture radar payload of Radar imaging satellite (RISAT) of ISRO. Proc. URSI GA 2005, New Delhi, India.
[12] Отчет о ПНИЭР «Прикладные исследования и экспериментальная разработка многочастотных радиолокационных станций дистанционного зондирования Земли на платформах легкомоторной и беспилотной авиации для решения задач мониторинга и противодействия техногенным и биогенным угрозам» по теме: Доработка макета РСА ДЗЗ, проведение экспериментальных исследований и подтверждение заданных требований в составе БПЛА» (заключительный, этап 3) / Рук. М.Е. Ровкин. Рег. №АААА-Б20-220090290004-2. - Томск, 2019. - 505 с
[13] Window function//Электронный ресурс (на англ. языке), доступно по ссылке https://en.wikipedia.org/wiki/Window_function, дата обращения 07.02.2023
[14] Weisstein, Eric W.//"Blackman Function"//Электронный ресурс (на англ. языке), доступно по ссылке https://mathworld. wolfram.com/BlackmanFunction.html, дата обращения 07.02.2023
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ УЧАСТКА ЗЕМНОЙ ПОВЕРХНОСТИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ (ВАРИАНТЫ) | 2012 |
|
RU2526850C2 |
| ИМПУЛЬСНО-ФАЗОВЫЙ ИЗМЕРИТЕЛЬ ТОЛЩИНЫ СЛОЕВ РАЗНОРОДНЫХ ЖИДКОСТЕЙ, А ТАКЖЕ ИХ ОТНОСИТЕЛЬНОГО ИЗМЕНЕНИЯ С ПОВЫШЕННОЙ ТОЧНОСТЬЮ | 1999 |
|
RU2188399C2 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2805901C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ВРЕМЕННОГО ПОЛОЖЕНИЯ СВЕРХШИРОКОПОЛОСНОГО СИГНАЛА И ЛОКАТОР ДЛЯ МОНИТОРИНГА ЖИВЫХ ОБЪЕКТОВ, РЕАЛИЗУЮЩИЙ ЭТОТ СПОСОБ | 2004 |
|
RU2258942C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2084922C1 |
| АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2012 |
|
RU2531562C2 |
| КОСМИЧЕСКИЙ МНОГОРЕЖИМНЫЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ СО СКАНИРУЮЩЕЙ ГИБРИДНО-ЗЕРКАЛЬНОЙ АНТЕННОЙ | 2023 |
|
RU2826709C1 |
| СПОСОБ ФИКСАЦИИ МОМЕНТА ОТДЕЛЕНИЯ ОТЦЕПА ОТ СОСТАВА И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ (ВАРИАНТЫ) | 2023 |
|
RU2815559C1 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ И ИЗМЕРЕНИЯ ИХ ПАРАМЕТРОВ ДВИЖЕНИЯ В ЗОНЕ СЕЛЕКЦИИ И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ | 2021 |
|
RU2783402C1 |
Группа изобретений относится к радиолокационной технике и может быть использована в обзорных однопозиционных радиолокационных станциях, а также в радиолокаторах с синтезированной апертурой антенны (РСА), производящих оценку поляризационных свойств зондируемых объектов. Техническим результатом изобретения является возможность оценки комплексной матрицы обратного рассеяния (КМОР) радиолокационных объектов в реальных условиях их наблюдения в РСА, без снижения скорости обзора по сравнению с обычными, не поляриметрическими РСА, и повышенной точностью оценивания КМОР. В способе оценки комплексной матрицы обратного рассеяния радиолокационных объектов комплексные огибающие ортогональных по поляризации компонент излученного импульсного радиосигнала с точностью до абсолютной фазы идентичны и описываются функцией 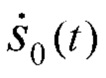 , фаза одной любой из компонент излучаемого векторного радиосигнала манипулирована, от импульса к импульсу, в соответствии с бинарной случайной функцией П(t), принимающей на периоде синтезирования TC=n⋅Т0 одно из двух равновероятных значений: -1 или 1 и обусловливающей равновероятные значения фазы 0 или 180 градусов манипулируемой компоненты, формируют сигналы
, фаза одной любой из компонент излучаемого векторного радиосигнала манипулирована, от импульса к импульсу, в соответствии с бинарной случайной функцией П(t), принимающей на периоде синтезирования TC=n⋅Т0 одно из двух равновероятных значений: -1 или 1 и обусловливающей равновероятные значения фазы 0 или 180 градусов манипулируемой компоненты, формируют сигналы  путем согласованной с функцией
путем согласованной с функцией  фильтрации компонент
фильтрации компонент  соответственно, формируют сигналы
соответственно, формируют сигналы  а оценки элементов
а оценки элементов  матрицы обратного рассеяния объекта, расположенного в элементе разрешения по дальности, формируют, соответственно, путем траекторной обработки временных последовательностей из n отсчетов значений сигналов
матрицы обратного рассеяния объекта, расположенного в элементе разрешения по дальности, формируют, соответственно, путем траекторной обработки временных последовательностей из n отсчетов значений сигналов  , взятых по каждому из n последовательно излученных зондирующих импульсов в стробе дальности, соответствующем элементу разрешения. n - количество периодов зондирования на интервале синтезирования. 3 н.п. ф-лы, 4 ил.
, взятых по каждому из n последовательно излученных зондирующих импульсов в стробе дальности, соответствующем элементу разрешения. n - количество периодов зондирования на интервале синтезирования. 3 н.п. ф-лы, 4 ил.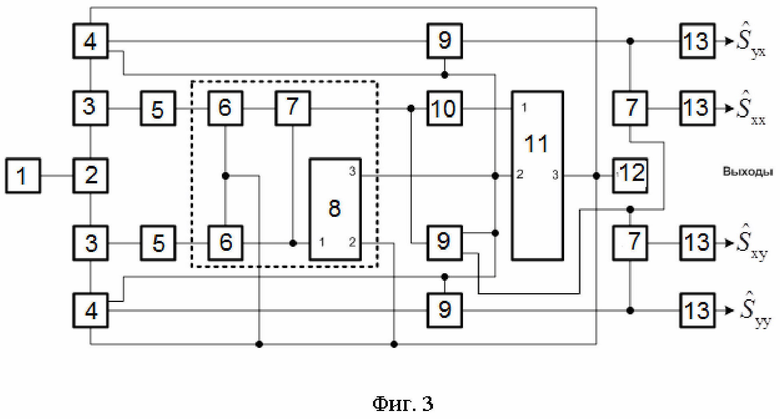
1. Способ оценки комплексной матрицы обратного рассеяния радиолокационных объектов, включающий формирование ортогональных по поляризации компонент импульсного векторного радиосигнала, посредством которого производится периодическое, с периодом повторения Т0, зондирование объектов, прием ортогонально поляризованных компонент  отраженного от объектов векторного радиосигнала, траекторную обработку последовательности отсчетов значений сигнала в стробе дальности, отличающийся тем, что комплексные огибающие ортогональных по поляризации компонент излученного импульсного радиосигнала с точностью до абсолютной фазы идентичны и описываются функцией
отраженного от объектов векторного радиосигнала, траекторную обработку последовательности отсчетов значений сигнала в стробе дальности, отличающийся тем, что комплексные огибающие ортогональных по поляризации компонент излученного импульсного радиосигнала с точностью до абсолютной фазы идентичны и описываются функцией  , фаза одной любой из компонент излучаемого векторного радиосигнала манипулирована, от импульса к импульсу, в соответствии с бинарной случайной функцией П(t), принимающей на периоде синтезирования ТС=n⋅Т0, где n - количество периодов зондирования на интервале синтезирования, одно из двух равновероятных значений: -1 или 1, и обусловливающей равновероятные значения фазы 0 или 180 градусов манипулируемой компоненты, формируют сигналы
, фаза одной любой из компонент излучаемого векторного радиосигнала манипулирована, от импульса к импульсу, в соответствии с бинарной случайной функцией П(t), принимающей на периоде синтезирования ТС=n⋅Т0, где n - количество периодов зондирования на интервале синтезирования, одно из двух равновероятных значений: -1 или 1, и обусловливающей равновероятные значения фазы 0 или 180 градусов манипулируемой компоненты, формируют сигналы  путем согласованной с функцией
путем согласованной с функцией  фильтрации компонент
фильтрации компонент  , соответственно, формируют сигналы
, соответственно, формируют сигналы  ,
,  , а оценки элементов
, а оценки элементов  матрицы обратного рассеяния объекта, расположенного в элементе разрешения по дальности, формируют, соответственно, путем траекторной обработки временных последовательностей из n отсчетов значений сигналов
матрицы обратного рассеяния объекта, расположенного в элементе разрешения по дальности, формируют, соответственно, путем траекторной обработки временных последовательностей из n отсчетов значений сигналов  , взятых по каждому из n последовательно излученных зондирующих импульсов в стробе дальности, соответствующем элементу разрешения.
, взятых по каждому из n последовательно излученных зондирующих импульсов в стробе дальности, соответствующем элементу разрешения.
2. Устройство оценки комплексной матрицы обратного рассеяния радиолокационных объектов, содержащее антенну полного поляризационного приема-передачи электромагнитного сигнала, поляризационный разделитель, первый и второй Y-циркуляторы, первый и второй цифровой приемники, первый усилитель мощности СВЧ, первый цифроаналоговый преобразователь, формирователь цифрового зондирующего сигнала, первое оперативное запоминающее устройство, второе оперативное запоминающее устройство, контроллер, опорный генератор, первый и второй траекторные фильтры, при этом вход антенны полного поляризационного приема-передачи электромагнитного сигнала соединен с выходом поляризационного разделителя, первый вход поляризационного разделителя соединен с первым входом первого Y-циркулятора, а второй вход поляризационного разделителя соединен с первым входом второго Y-циркулятора, второй вход первого Y-циркулятора соединен с сигнальным СВЧ входом первого цифрового приемника, второй вход второго Y-циркулятора соединен с сигнальным СВЧ входом второго цифрового приемника, третий вход первого Y-циркулятора соединен с выходом первого усилителя мощности СВЧ, вход первого усилителя мощности СВЧ соединен с выходом первого цифроаналогового преобразователя, выходная шина данных первого цифрового приемника соединена с шиной записи первого оперативного запоминающего устройства, выходная шина данных второго цифрового приемника соединена с шиной записи второго оперативного запоминающего устройства, шина чтения первого оперативного запоминающего устройства соединена с входом первого траекторного фильтра, шина чтения второго оперативного запоминающего устройства соединена с входом второго траекторного фильтра, выход опорного генератора соединен с входами синхронизации первого и второго цифровых приемников, входами синхронизации первого цифроаналогового преобразователя, входами синхронизации контроллера и формирователя цифрового зондирующего сигнала, к единой шине управления контроллера подсоединены входы управления первого и второго цифровых приемников, первого и второго оперативных запоминающих устройств, а также формирователя цифрового зондирующего сигнала, отличающееся тем, что дополнительно введены второй усилитель мощности СВЧ, второй цифроаналоговый преобразователь, первый, второй и третий управляемые цифровой инвертор знака числового кода, третье оперативное запоминающее устройство, генератор бинарной случайной последовательности, а также третий и четвертый траекторные фильтры, третий вход второго Y-циркулятора соединен с выходом второго усилителя мощности СВЧ, вход второго усилителя мощности СВЧ соединен с выходом второго цифроаналогового преобразователя, вход данных первого цифроаналогового преобразователя соединен с выходом первого цифрового инвертора знака числового кода, вход данных второго цифроаналогового преобразователя соединен с цифровым выходом цифрового формирователя цифрового зондирующего сигнала, с которым соединен также вход данных первого цифрового инвертора знака числового кода, вход управления первого цифрового инвертора знака числового кода соединен с выходом генератора бинарной случайной последовательности, к которому подсоединен также вход записи данных третьего оперативного запоминающего устройства, тактовый вход генератора бинарной случайной последовательности соединен с первым выходом контроллера, шина чтения первого оперативного запоминающего устройства соединена с входом данных второго управляемого цифрового инвертора знака числового кода, а шина чтения второго оперативного запоминающего устройства соединена с входом данных третьего управляемого цифрового инвертора знака числового кода, выход второго управляемого цифрового инвертора знака числового кода соединен с входом третьего траекторного фильтра, выход третьего управляемого цифрового инвертора знака числового кода соединен с входом четвертого траекторного фильтра, входы управления второго и третьего управляемых цифровых инверторов знака числового кода соединены с выходом данных третьего оперативного запоминающего устройства, выход опорного генератора соединен с входом синхронизации второго цифроаналогового преобразователя, к единой шине управления контроллера подсоединен вход управления третьего оперативного запоминающего устройства.
3. Устройство оценки комплексной матрицы обратного рассеяния радиолокационных объектов, содержащее антенну полного поляризационного приема-передачи электромагнитного сигнала, поляризационный разделитель, первый и второй Y-циркуляторы, первый и второй цифровые приемники, первый усилитель мощности СВЧ, цифроаналоговый преобразователь, формирователь цифрового зондирующего сигнала, первое и второе оперативные запоминающие устройства, контроллер, опорный генератор, первый и второй траекторные фильтры, при этом вход антенны полного поляризационного приема-передачи электромагнитного сигнала соединен с выходом поляризационного разделителя, первый вход поляризационного разделителя соединен с первым входом первого Y-циркулятора, а второй вход поляризационного разделителя соединен с первым входом второго Y-циркулятора, второй вход первого Y-циркулятора соединен с сигнальным СВЧ входом первого цифрового приемника, второй вход второго Y-циркулятора соединен с сигнальным СВЧ входом второго цифрового приемника, третий вход первого Y-циркулятора соединен с выходом первого усилителя мощности СВЧ вход первого усилителя мощности СВЧ соединен с выходом цифроаналогового преобразователя, вход данных цифроаналогового преобразователя соединен с выходом формирователя цифрового зондирующего сигнала, выходная шина данных первого цифрового приемника соединена с шиной записи первого оперативного запоминающего устройства, выходная шина данных второго цифрового приемника соединена с шиной записи второго оперативного запоминающего устройства, шина чтения первого оперативного запоминающего устройства соединена с входом первого траекторного фильтра, шина чтения второго оперативного запоминающего устройства соединена с входом второго траекторного фильтра, выход опорного генератора соединен с входами синхронизации первого и второго цифровых приемников, цифроаналогового преобразователя, контроллера и формирователя цифрового зондирующего сигнала, к единой шине управления контроллера подсоединены входы управления первого и второго цифровых приемников, первого, второго оперативных запоминающих устройств, а также формирователя цифрового зондирующего сигнала, отличающееся тем, что дополнительно введены: второй усилитель мощности СВЧ, управляемый аналоговый инвертор, генератор бинарной случайной последовательности, третье оперативное запоминающее устройство, первый и второй управляемые цифровые инверторы знака числового кода, третий и четвертый траекторные фильтры, при этом третий вход второго Y-циркулятора соединен с выходом второго усилителя мощности СВЧ, к выходу цифроаналогового преобразователя подсоединен вход СВЧ управляемого аналогового инвертора, к выходу которого присоединен вход второго усилителя мощности СВЧ, вход управления управляемого аналогового инвертора соединен с выходом генератора бинарной случайной последовательности, к которому подсоединен также вход записи данных третьего оперативного запоминающего устройства, тактовый вход генератора бинарной случайной последовательности соединен с первым выходом контроллера, вход данных первого управляемого цифрового инвертора знака числового кода подсоединен также к шине чтения первого оперативного запоминающего устройства, вход данных второго управляемого цифрового инвертора знака числового кода подсоединен также к шине чтения второго оперативного запоминающего устройства, выход первого управляемого цифрового инвертора знака числового кода соединен с входом третьего траекторного фильтра, выход второго управляемого цифрового инвертора знака числового кода соединен с входом четвертого траекторного фильтра, входы управления первого и второго управляемых цифровых инверторов знака числового кода соединены с шиной чтения данных третьего оперативного запоминающего устройства, а вход управления третьего оперативного запоминающего устройства подсоединен к единой шине управления контроллера.
| СПОСОБ СЕЛЕКЦИИ НЕВЗАИМНЫХ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2413185C1 |
| Способ измерения поляризационной матрицы рассеяния объекта | 2016 |
|
RU2619769C1 |
| КАНАРЕЙКИН Д.Б., ПАВАЛОВ М.В., ПОТЕХИН В.А | |||
| Поляризация радиолокационых сигналов | |||
| М.: Сов | |||
| радио, 1966, 440 с | |||
| С | |||
| Прибор для массовой выработки лекал | 1921 |
|
SU118A1 |
| БУТЬКО В.А., НОСОВ Д.М., СУРКОВ А.С., ХЛУСОВ В.А | |||
| Экспериментальные измерения поляризационно-доплеровских портретов радиолокационных объектов // Известия вузов | |||
