Область ТЕХНИКИ
[0001] Настоящее изобретение относится к измерительному устройству для измерения силы, действующей на край отверстия контейнера, такого как флакон.
[0002] Более конкретно изобретение относится к способу настройки машины для закрытия флакона путем фиксации резиновой пробки на краю отверстия флакона. Таким образом, фиксация резиновой пробки на краю отверстия флакона содержит этапы: (i) проталкивание резиновой пробки на край отверстия флакона, (ii) помещение крышки на резиновую пробку, а также (iii) обжатие крышки вокруг резиновой пробки и края отверстия флакона.
УРОВень ТЕХНИКИ
[0003] Фармацевтические продукты или лекарственные средства предоставляются во множестве различных форм, включая жидкости, порошки, таблетки и капсулы, для их применения. Например, многие фармацевтические продукты назначаются пациентам в жидкой форме для перорального приема или инъекции. Фармацевтический продукт обычно предоставляется в первичной упаковке, в которую непосредственно помещен фармацевтический продукт. В число примеров первичных упаковок входят блистерные упаковки, предварительно заполненные шприцы, контейнеры и флаконы.
[0004] В отношении первичного упаковывания фармацевтических продуктов часто весьма важно, чтобы выполнялись определенные условия для конкретного фармацевтического продукта. Как правило, фармацевтические продукты помещаются в первичную упаковку в стерильных условиях, чтобы не допустить загрязнения и деградации. Первичная упаковка, содержащая фармацевтический продукт, затем обычно дополнительно упаковывается, например, в картонные коробки, в целях удобства транспортировки, реализации и т.п.
[0005] Как упоминалось, в число обычных первичных упаковок входят флаконы и другие контейнеры, такие как шприцы, инфузионные мешки и картриджи. Флаконы обычно имеют полый корпус, в котором находится фармацевтический продукт. Корпус содержит горловину, имеющую открытый конец, окруженный фланцеобразным краем. Для закрытия флаконов на краю отверстия часто помещают упругую резиновую пробку, которая удерживается крышкой, обжимаемой вокруг резиновой пробки и края корпуса.
[0006] Для укупоривания отверстия флакона резиновая пробка должна располагаться на краю отверстия, плотно прилегая к нему. С этой целью она обычно поджимается к краю так, что слегка деформируется. Она удерживается в сжатом состоянии крышкой, которая обычно выполнена из пластика или металла.
[0007] В промышленных условиях для первичного упаковывания фармацевтических продуктов во флаконы широко используются упаковочные машины. С помощью этих машин резиновые пробки вместе с крышкой обычно пневматически прижимаются к краю. В этом случае крышка обжимается вокруг резиновой пробки и края так, что крышка может сохранять остаточную силу. Таково рода остаточная сила гарантирует, что пробка по-прежнему остается в сжатом состоянии на краю, после того как флакон выведен из упаковочной машины.
[0008] При таких способах упаковывания важно, чтобы давление или сила, прикладываемая в процессе первичного упаковывания и после него, надлежащим образом регулировалась. С одной стороны, не следует допускать, чтобы при сжатии резиновой пробки на краю флакона сила была слишком большой, что может привести к повреждению края или пробки. С другой стороны, следует убедиться, что после первичного упаковывания остаточная сила, обусловленная действием плунжера на край, достаточно высока, так что отверстие плотно закрыто герметичным образом.
[0009] Для такой регулировки современные упаковочные машины предоставляют информацию о давлении или силе, прикладываемой пневматически, например пневматическим цилиндром, воздействующим на крышку и пробку, помещенную на флакон. Однако для точного определения ситуации такой информации недостаточно. Например, в процессе обжатия крышки к самой крышке и резиновой пробке прикладывается давление в дополнение к давлению, прикладываемому пневматическим цилиндром. Однако данные о таком дополнительном давлении не содержаться в упомянутой информации. В результате пневматическое давление в сумме с давлением, создаваемым при обжатии, может привести образования силы, повреждающей пробку, например, так что она пластически деформируется с заходом в отверстие и горловину флакона. В качестве другого примера резиновые пробки могут иметь разные формы и размеры, так что давление, приложенное к внешней стороне пробки, не позволяет судить о силе, которая в действительности приложена к краю флакона.
[0010] Следовательно, существует потребность в устройстве и способе, которые позволят собирать информацию о состоянии резиновой пробки, помещенной на край отверстия флакона или схожего контейнера для закрытия флакона или схожего контейнера, предустановленным способом, обладающим высокой точностью.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0011] Согласно изобретению данная потребность удовлетворяется устройством, определяемым признаками независимого пункта 1 формулы изобретения, а также способом, определяемым признаками независимого пункта 14 формулы изобретения. Предпочтительные варианты осуществления определены в зависимых пунктах формулы изобретения.
[0012] В частности, в одном варианте осуществления изобретение представляет собой измерительное устройство для измерения силы, действующей на край отверстия целевого флакона. Устройство имеет корпус с внутренним пространством, а также отверстие для доступа во внутреннее пространство с наружной стороны корпуса. Кроме того, оно содержит жесткий плунжер, имеющий край, форма которого эквивалентна или идентична форме края отверстия целевого флакона, а также датчик силы. Жесткий плунжер продолжается через отверстие корпуса во внутреннее пространство корпуса. Край жесткого плунжера расположен вне корпуса. Датчик силы расположен во внутреннем пространстве корпуса. Жесткий плунжер способен перемещаться относительно корпуса, при этом соединен с датчиком силы. Таким образом, в схеме согласно изобретению сила, действующая на край жесткого плунжера, может передаваться на датчик силы, который, в свою очередь, может вырабатывать сигнал, соответствующий приложенной силе. Устройство может быть выполнено из металлического материала, такого как нержавеющая сталь или алюминий, либо из пластикового материала.
[0013] Термин ʺфлаконʺ в контексте настоящего описания может относиться к флаконам в буквальном смысле, т.е. относительно малым сосудам или бутылочкам, часто используемым для хранения фармацевтических продуктов или фармацевтических препаратов, либо лекарственных средств в жидкой, порошковой или капсулированной форме. Флакон может быть выполнен из поддающегося стерилизации материала, такого как стекло или пластик, например, полипропилена.
[0014] В то время как изобретение направлено на измерение силы, действующей на край отверстия флакона, т.е. целевого флакона, настоящее раскрытие также содержит варианты осуществления, в которых используются другие контейнеры, такие как шприцы, инфузионные мешки или картриджи. В частности, измерительное устройство согласно изобретению и его предпочтительные варианты осуществления также могут быть реализованы для измерения силы, действующей на край отверстия целевого шприца, целевого инфузионного мешка или целевого картриджа. Таким образом, измерительное устройство аналогичным образом применимо как для целевых флаконов, таки для целевых шприцов, целевых инфузионных мешков и целевых картриджей.
[0015] Термин ʺэквивалентной формыʺ, используемый в отношении края жесткого плунжера и края отверстия целевого флакона, может относиться к форме соответствующих частей, являющихся по существу одинаковыми. В частности, части или участки целевого флакона, соприкасающиеся с резиновой пробкой для закрытия целевого флакона, могут быть по форме идентичными, насколько это возможно или достижимо.
[0016] Устройство согласно изобретению может применяться в упаковочной машине или упаковочном оборудовании, не требуя адаптации упаковочной машины или упаковочного оборудования либо их частей. Таким образом, устройство позволяет эффективно оценивать состояние в процессе упаковывания в машине или оборудовании, идентичное или весьма близкое к действительному состоянию целевого флакона. Таким образом, можно достичь сбора точной информации в отношении соответственно давления и силовых воздействий. Имея такую информацию, процесс упаковывания может регулироваться так, чтобы эффективно достичь оптимального укупоривания целевого флакона.
[0017] Помимо этого, посредством измерительного устройства согласно изобретению сила, приложенная к краю в процессе упаковывания, может непрерывно измеряться напрямую в области контакта между пробкой и краем. Это позволяет оценивать силы в точке, в которой это важно для заключения о состоянии закрытия флакона в динамике по времени. Перехода к измерениям, касающимся самой пробки, можно избежать. Таким образом, сила может точно измеряться на протяжении всего процесса упаковывания, что позволяет точно задавать состояние целевого флакона путем настройки упаковочной машины или упаковочного оборудования.
[0018] Предпочтительно жесткий плунжер способен перемещаться линейно относительно корпуса. Термин ʺлинейно-подвижныйʺ в данном контексте может относиться к перемещению вдоль прямой оси. Например, жесткий плунжер может перемещаться вдоль продольной оси корпуса и/или плунжера. Такая способность линейно перемещаться позволяет эффективно переносить силу или давление от края жесткого плунжера на датчик силы.
[0019] В отношении подвижности жесткого плунжера относительно корпуса может быть полезно, если трение между жестким плунжером и корпусом сравнительно мало. Такого рода низкое трение может позволить прийти к заключению на основании силового сигнала, измеренного датчиком силы, непосредственно о силе, приложенной на краю жесткого плунжера. В таком варианте осуществления коррекции сигнала или измеренной силы можно избежать.
[0020] Устройство предпочтительно имеет высоту, по существу равную высоте целевого флакона. Такое устройство позволяет его использовать в обычной упаковочной машине или обычном упаковочном оборудовании, не требуя каких-либо настроек частей машины или оборудования, принимающих участие в наложении резиновой пробки и крышки на флакон или устройство. Это позволяет точно оценить реальную ситуацию в процессе упаковывания и оптимизировать соответствующие параметры.
[0021] Предпочтительно корпус и жесткий плунжер имеют внешнюю форму, по существу идентичную внешней форме целевого флакона, чтобы применяться в обычных упаковочных машинах или обычном упаковочном оборудовании. Термин ʺпо существу идентичная внешняя формаʺ в данном контексте может, в частности, относится к тем участкам целевого флакона, которые являются существенными для соответствующей упаковочной машины или соответствующего упаковочного оборудования. Например, упаковочная машина может иметь посадочное место для размещения и удерживания флакона в целях его обработки. Посадочное место, например, выполнено с возможностью охватывать дно и нижнюю секцию корпуса целевого флакона. Для такой машины дно и нижняя секция измерительного устройства могут иметь форму, идентичную форме дна и нижней секции флакона, так что устройство может обрабатываться машиной идентично флакону.
[0022] Датчик силы измерительного устройства может иметь любое пригодное средство измерения, например пневматический элемент и т.п. Предпочтительно он содержит пьезоэлектрический элемент. Такой пьезоэлектрический элемент может иметь кольцеобразный участок, выполненный с возможностью расположения во внутреннем пространстве корпуса, имеющем по существу цилиндрическую форму. В частности, он может представлять собой пьезоэлектрический кварц.
[0023] Измерительное устройство предпочтительно содержит блок интерпретации сигнала для оценки сигнала, сгенерированного датчиком силы, при этом блок интерпретации сигнала расположен вне корпуса и соединен с датчиком силы. Блок интерпретации сигнала может соединяться с датчиком силы посредством провода. Для доступа к датчику силы корпус устройства может быть снабжен отверстием в стенке, смежным с внутренним пространством корпуса. Такой блок интерпретации сигнала позволяет получать сигнал и/или переводить его в определенный параметр либо передавать в определенный блок.
[0024] Таким образом, датчик силы предпочтительно имеет беспроводной передатчик для передачи сигнала в блок интерпретации сигнала, при этом блок интерпретации сигнала имеет беспроводной приемник для приема сигнала с датчика силы. Такая схема обеспечивает возможность беспроводного сообщения между датчиком силы и блоком интерпретации сигнала. Беспроводное сообщение может быть предпочтительным, например, с точки зрения удобства установки, дополнительной обработки и т.п. При такой конструкции корпус измерительного устройства может быть выполнен из материала, не создающего помех для радиосвязи, например из пластикового материала.
[0025] Измерительное устройство может содержать резиновую пробку, располагаемую на краю жесткого плунжера. Такая пробка может быть реализована в соответствии с требованиями для конкретного целевого флакона. Как правило, резиновые пробки способны упруго деформироваться, при этом выполнены из пластикового материала, такого как бутилкаучук, или схожего материала. Таким образом, измерительное устройство может также содержать крышку, располагаемую на резиновой пробке и на краю жесткого плунжера, когда резиновая пробка расположена на краю жесткого плунжера. Поскольку крышка выполнена из металла или пластика, она может пластически деформироваться. Таким образом, она может удерживать резиновую пробку в сжатом состоянии, так что на краю действует сила.
[0026] Предпочтительно жесткий плунжер имеет головную часть, содержащую край и поршневой участок, продолжающийся через отверстие корпуса во внутреннее пространство корпуса. Такой жесткий плунжер позволяет реализовать край независимо от предварительных условий передачи давления на датчик силы. Таким образом, жесткий плунжер может иметь усложненную и эффективную форму.
[0027] Предпочтительно корпус имеет горловину, имеющую проходной канал, заканчивающийся в отверстии на одной стороне и во внутреннем пространстве на другой стороне, а также фланец, образованный вокруг отверстия и выступающий поверх горловины. Термин ʺвыступающий поверх горловиныʺ, используемый в отношении фланца корпуса или головной части жесткого плунжера, может, в частности, относится к латеральному или радиальному продолжению соответствующих частей, превышающему латеральное или радиальное продолжение горловины. Горловина, например, по форме может быть выполнена в соответствии с горловиной целевого флакона.
[0028] Таким образом, головная часть жесткого плунжера предпочтительно выступает за горловину корпуса и располагается рядом с фланцем корпуса, при этом поршневой участок головной части жесткого плунжера предпочтительно продолжается к проходному каналу горловины корпуса во внутреннее пространство корпуса. В частности, поршневой участок может продолжаться целиком или частично через проходной канал горловины. Таким образом, он может продолжаться во внутреннее пространство корпуса или заканчиваться в горловине корпуса. Это позволяет эффективно передавать усилие от края на датчик силы.
[0029] Таким образом, жесткий плунжер предпочтительно содержит соединительную часть, имеющую соединитель поршня и фланцеобразный соединитель датчика, противоположный соединителю поршня, при этом соединительная часть отделима от головной части. Соединитель поршня соединительной части может быть выполнен с возможностью соединения с поршневым участком головной части. Соединитель датчика соединительной части может выступать за горловину корпуса. Соединитель датчика может контактировать с датчиком силы во внутреннем пространстве корпуса.
[0030] Предпочтительно корпус имеет верхнюю часть и базовую часть, при этом отверстие корпуса расположен в верхней части, причем нижняя часть выполнена с возможностью расположения на плоской поверхности, при этом верхняя часть отделима от базовой части. Такой корпус, состоящий из двух частей, может позволить легко получить доступ в его внутреннее пространство. Это может быть полезно для манипулирования датчиком силы.
[0031] Таким образом, верхняя часть корпуса и базовая часть корпуса предпочтительно имеют резьбу и охватываемый участок, совместно образующие винтовое соединение. Такое винтовое соединение позволяет прочно соединять и легко разъединять эти две части корпуса.
[0032] В другом варианте осуществления изобретение представляет собой способ настройки машины для закрытия флакона путем фиксации резиновой пробки на краю отверстия флакона. Такая фиксация резиновой пробки машиной предусматривает проталкивание резиновой пробки на край отверстия флакона, помещение крышки на резиновую пробку, а также обжатие крышки вокруг резиновой пробки и края отверстия флакона. Таким образом, крышка может быть выполнена из пластически деформируемого материала, такого как металл или пластик. Способ содержит этапы: размещение измерительного устройства по любому из предшествующих пунктов в машине вместо флакона; начало получения сигнала, предоставляемого датчиком силы измерительного устройства; управление машиной для фиксации резиновой пробки на краю измерительного устройства; наблюдение за сигналом датчика силы устройства в процессе работы машины; оценку наблюдаемого сигнала; а также настройку машины в соответствии с оцененным сигналом.
[0033] Такой способ позволяет оценить сигнал, выдаваемый измерительным устройством согласно изобретению, для настройки машины. Это позволяет учитывать реальные силовые условия в области контакта между краем и резиновой пробкой при настройке машины. Таким образом, флаконы или схожие контейнеры могут быть точным и заданным образом закрыты или укупорены.
[0034] Предпочтительно способ дополнительно содержит задание максимальной силы и минимальной силы. Таким образом, машина предпочтительно настраивается так, что сила, измеренная измерительным устройством в процессе выполняемых машиной операций, не превышает максимальной силы, а также так, что остаточная сила, измеренная измерительным устройством после выполняемых машиной операций, не ниже минимальной силы.
[0035] Предпочтительно способ содержит наблюдение за сигналом датчика силы устройства после того, как машина выполнила работу, и оценку наблюдаемого сигнала. Таким образом, сила может измеряться и контролироваться после процесса упаковывания. Такое измерение может включать в себя удаление измерительного устройства из машины и продолжение наблюдения за измеренными сигналами.
[0036] Таким образом, существует возможностью оценивать стабильность укупоривания в течение довольно продолжительного периода времени, например, в течение месяца. Например, изменения силы, действующей на край, может наблюдаться в динамике по времени, что, например, позволяет определить потерю давления на величину, которая может быть критической для обеспечения герметичного закрытия.
[0037] Вышеупомянутые аспекты изобретения, а также другие аспекты станут очевидными из описанных ниже вариантов осуществления и будут освещены со ссылкой на них.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0038] Измерительное устройство и способ согласно изобретению ниже описаны подробнее на примере вариантов осуществления и со ссылкой на сопроводительные чертежи, где:
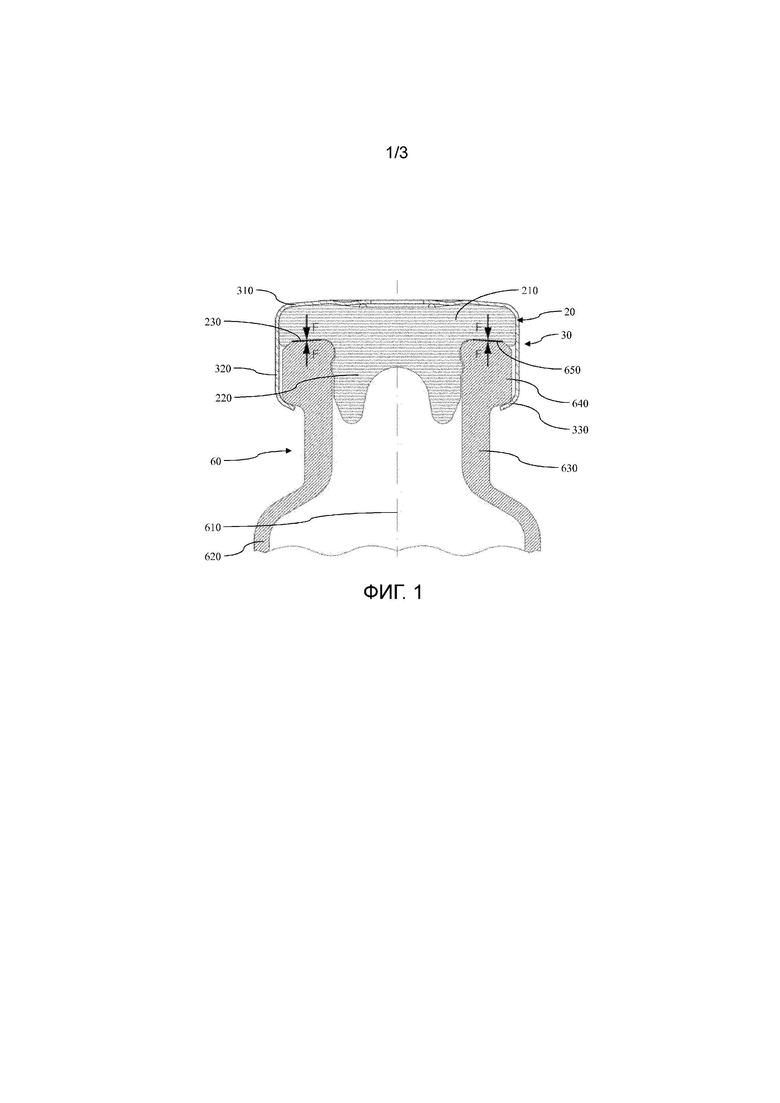
на Фиг. 1 показан частичный вид в разрезе целевого флакона, закрытого резиновой пробкой, зафиксированной крышкой;
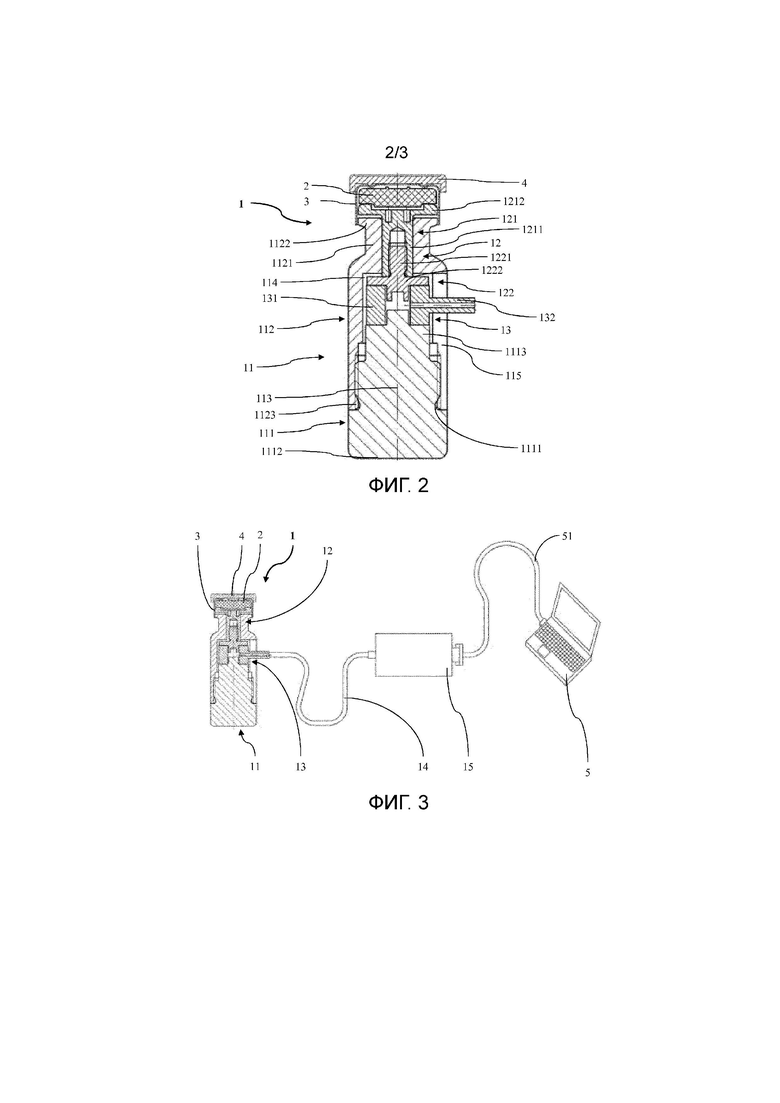
на Фиг. 2 показан частичный вид в разрезе первого варианта осуществления измерительного устройства согласно изобретению;
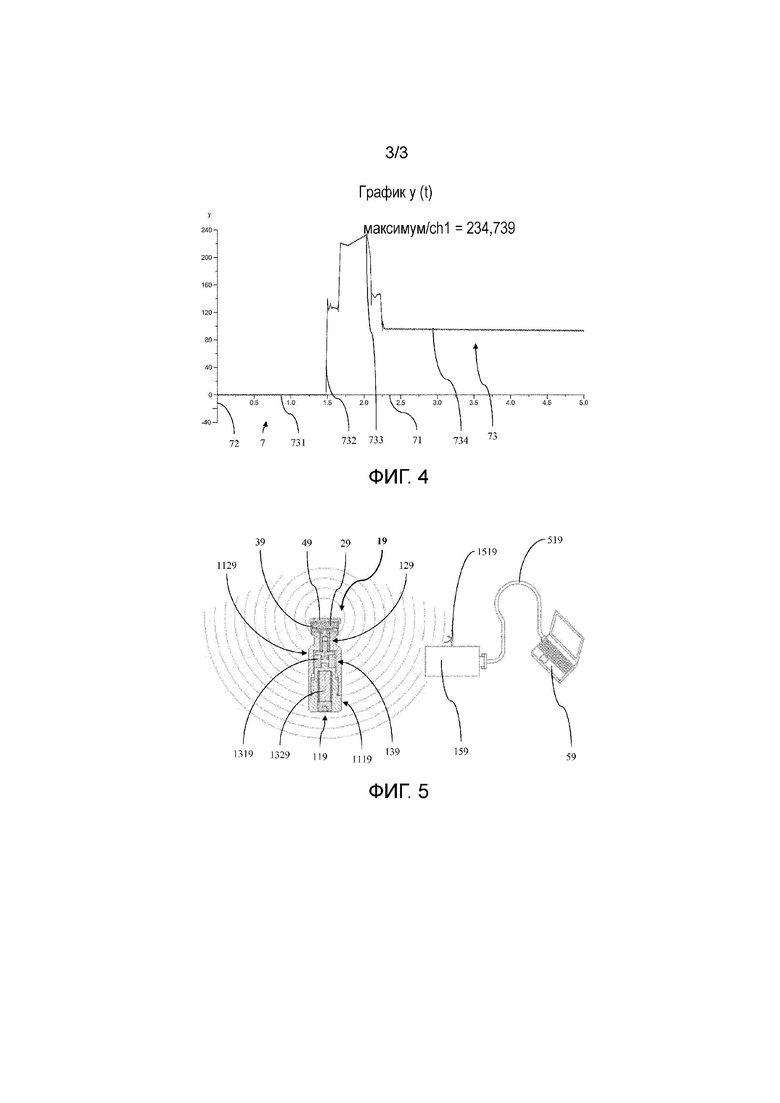
на Фиг. 3 показан вид в разрезе в перспективе измерительного устройства, представленного на Фиг. 2;
на Фиг. 4 показана диаграмма, отображенная программным обеспечением для оценки результатов измерения устройства, представленного на Фиг. 2;
на Фиг. 5 показан вид в разрезе в перспективе второго варианта осуществления измерительного устройства согласно изобретению.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0039] В нижеследующем описании используются определенные термины в целях удобства, но не для ограничения изобретения. Термины ʺправыйʺ, ʺлевыйʺ, ʺвверхʺ, ʺвнизʺ, ʺподʺ и ʺнадʺ относятся к направлениям на фигурах. Терминология содержит термины, выраженные в явном виде, а также их производные и термины, имеющие схожее смысловое значение. Кроме того, относительные пространственные термины, такие как "под", "ниже", "нижний", "выше", "верхний", "проксимальный", "дистальный" и т.п. могут использоваться для описания взаимного расположения одних элементов или деталей по отношению к другим элементам или деталям, изображенным на фигурах. Эти относительные пространственные термины ставят целью охватить различные положения и ориентации используемых или работающих устройств в дополнение к положению и ориентации, показанным на фигурах. Например, если устройство на фигурах находится в перевернутом виде, элементы, описанные как "находящиеся ниже" или "находящиеся под" относительно других элементов или деталей, в этом случае окажутся "над" или "поверх" относительно других элементов или деталей. Таким образом, приведенный в качестве примера термин "ниже" может охватывать одновременно положения и ориентации, соответствующие понятиям «выше» и «ниже». Устройства могут иметь иную ориентацию (повернуты на 90 градусов или занимают другое ориентационное положение), при этом относительные пространственные дескрипторы, использованные в настоящем описании, должны интерпретироваться соответствующим образом. Точно так же описание перемещения вдоль и вокруг различных осей включает различные особые положения и ориентации устройств.
[0040] Чтобы избежать повторения на фигурах и в описании различных аспектов и иллюстративных вариантов осуществления, следует понимать, что многие признаки являются общими для многих аспектов и вариантов осуществления. Неупоминание аспекта в описании или его отсутствие на фигуре не подразумевает, что данный аспект отсутствует в вариантах осуществления, в которые этот аспект включен. Наоборот, этот аспект может отсутствовать для упрощения и чтобы избежать излишне подробного описания. В данном контексте следующее применимо к остальной части данного описания: если для пояснения чертежей фигура содержит ссылочные позиции, которые не поясняются в непосредственно связанной с ней частью описания, следует обратиться к предшествующим или последующим разделам описания. Кроме того, если для достижения ясности на чертеже не все детали или части снабжены ссылочными позициями, следует обратиться к другим чертежам, на которых показаны те же детали. Одинаковые позиции на двух или более фигурах представляют одинаковые или схожие элементы.
[0041] На Фиг. 1 показан участок целевого стеклянного флакона 60, закрытого резиновой пробкой 20, зафиксированной на флаконе 60 посредством крышки 30. Флакон 60 имеет вертикально продолжающуюся продольную ось 610, относительно которой флакон 60 осесимметричен. Он содержит полую удерживающую секцию 620, в которую заполняется фармацевтический продукт. На своем верхнем конце удерживающая секция 620 через плечо переходит в горловину 630. Горловина 630 имеет меньший диаметр, чем удерживающая секция 620. На своем верхнем конце горловина 630 переходит во фланцеобразный край 640 флакона 60. Горловина 630 и край 640 имеют центральное отверстие, через которое внутреннее пространство удерживающей секции 620 доступно снаружи флакона 60. Верхняя поверхность края 640 образует область 650 контакта с пробкой.
[0042] На виде в разрезе по Фиг. 1 резиновая пробка 20 имеет по существу T-образную форму. Таким образом, она имеет секцию 210 головки и секцию 220 ножки. Секция 210 головки латерально продолжается поверх секции 220 ножки и прилегает к верхней поверхности края 640 флакона 60. Таким образом, нижняя поверхность секции 640 головки образует круговую область 230 контакта с флаконом. Секция 220 ножки пробки 20 вертикально продолжается в горловину 630 флакона 60. Она имеет кольцевое наружное ребро, лежащее в соответствующей кольцевой внутренней канавке края 640 флакона 60. Пробка 20 и флакон 60 прилегают друг к другу в области 230 контакта с флаконом и области 650 контакта с пробкой. В этих областях прикладывается сила F уплотнения, порождаемая прижатием пробки 20 к флакону 60.
[0043] Пробка 20 удерживается на флаконе 60 крышкой 30. Крышка 30 имеет торцевую сторону 310, соприкасающуюся с верхней поверхностью пробки 20. От торцевой стороны 310 вниз продолжается кольцеобразный обод 320, который латерально, т.е. слева и справа, соприкасается с пробкой 20 и латерально примыкает к краю 640 флакона 60. На своем нижнем конце крышка 30 имеет секцию 330 обжатия, которая продолжается под нижнюю сторону края 640, выступающего поверх горловины 630.
[0044] На Фиг. 2 показаны некоторые детали первого варианта осуществления измерительного устройства 1 согласно изобретению. Измерительное устройство 1 содержит корпус 11, жесткий плунжер 12, а также датчик 13 силы. Корпус 11 имеет внутреннее пространство 114, а также отверстие для доступа во внутреннее пространство 114 с наружной стороны корпуса 11. Корпус 11 состоит из верхней части 112 и базовой части 111, при этом отверстие расположено в верхней части 112. Базовая часть 111 имеет плоское дно 1112, пригодное для размещения на плоской поверхности. Верхняя часть 112 соединена с базовой частью 111 посредством винтового соединения, при этом верхняя часть 112 содержит охватываемый участок 1123 винтового соединения, а базовая часть 111 - внутреннюю резьбу 1111 винтового соединения. Таким образом, базовая часть 111 и верхняя часть 112 разъемным образом собираются между собой посредством винтового соединения.
[0045] Верхняя часть 112 корпуса 11 имеет горловину 1121, имеющую центральный вертикальный проходной канал, заканчивающийся в отверстии на одной стороне и во внутреннем пространстве 114 на другой стороне. Вокруг отверстия образован фланец 1122, латерально выступающий поверх горловины 1121, т.е. продолжающийся дальше влево и вправо, чем горловина 1121.
[0046] Жесткий плунжер 12 содержит верхнюю головную часть 121 и нижнюю соединительную часть 122. Головная часть 121 имеет край 1212 и полый поршневой участок 1211. Край 1212 головной части 121 латерально выступает за горловину 1121 верхней части 112 корпуса 11 и располагается рядом с фланцем 1122 верхней части 112 корпуса 11. Он расположен вне корпуса 11 и по форме эквивалентен краю отверстия целевого флакона, такого как флакон 60 по Фиг. 1. Поршневой участок 1211 головной части 121 вертикально продолжается в проходной канал горловины 1121 верхней части 112 корпуса 11 до его внутреннего пространства 114. Таким образом, поршневой участок 1211 сквозного проходного канала горловины 1121 продолжается до самого его нижнего конца.
[0047] Соединительная часть 122 жесткого плунжера 12 расположена по существу непосредственно под головной частью 121. Она содержит верхнюю вертикальную стойку 1221 в качестве соединителя поршня и нижний фланцеобразный соединитель 1222 датчика. Стойка 1221 продолжается вверх в поршневой участок 1211 головной части 121, так что нижний конец поршневого участка 1211 упирается в верхнюю поверхность соединителя 1222 датчика. Таким образом, соединительная часть 122 и головная часть 121 соединены друг с другом с возможностью отсоединения.
[0048] Датчик 13 силы расположен во внутреннем пространстве 114 корпуса 11. Он содержит кольцеобразный пьезоэлектрический кварц 131 в качестве пьезоэлектрического элемента, а также кабельный порт 132, продолжающийся за пределы корпуса 11 через отверстие 115, образованное в верхней части 112 корпуса 11. Нижняя поверхность соединителя 1222 датчика соединительной части 122 жесткого плунжера 12 упирается в верхнюю поверхность датчика 13 силы во внутреннем пространстве 114 корпуса 11. Нижняя часть 111 корпуса 11 содержит внутреннее посадочное место 1113, имеющее низкую ножку. Пьезоэлектрический кварц 131 датчика 13 силы размещается на посадочном месте 1113 нижней части 111 корпуса 11, так что низкая ножка продолжается во внутреннем пространстве кольца пьезоэлектрического кварца 131.
[0049] Жесткий плунжер 12 вертикально подвижен относительно корпуса 11 и соединен с датчиком 13 силы. Корпус 11 вместе с жестким плунжером 12 имеют внешнюю форму, по существу идентичную внешней форме целевого флакона. Устройство 1 имеет вертикальную продольную ось 113, вдоль которой жесткий плунжер 12 способен перемещаться. Жесткий плунжер 12 и базовая часть 111 корпуса 11 осесимметричны относительно оси 113.
[0050] Поверх края 1212 жесткого плунжера 12 помещаются резиновая пробка 2 и крышка 3. В положении, показанном на Фиг. 2, резиновая пробка 2 находится в несжатом состоянии, при этом крышка 3 не присоединена к резиновой пробке 2 и краю 1212. Поверх крышки 3 помещен отламывающийся элемент 4, который может соединяться с крышкой 3. Отламывающийся элемент выполнен с возможностью захвата пользователем и снятия вместе с крышкой 3, чтобы открыть целевой флакон.
[0051] Как показано на Фиг. 3, кабельный порт 132 датчика 13 силы соединен с одним концом первого провода 14, который на своем другом конце соединен с блоком 15 интерпретации сигнала или сигнальным блоком. Блок 15 интерпретации сигнала расположен вне корпуса 11. Он соединен с портативным компьютером 5 посредством второго провода 51.
[0052] С помощью блока 15 интерпретации сигнала сигнал, сгенерированный датчиком 13 силы, может быть оценен, т.е. может быть смоделировано сопротивление постоянному току в виде пропорционального напряжения. Напряжение прямо пропорционально силе, действующей на датчик 13 силы. Таким образом, выходной сигнал блока 15 интерпретации сигнала будет связан с механической силой, приложенной к датчику 13 силы, как если бы он прошел через эквивалентную цепь. Этот выходной сигнал передается на портативный компьютер 5 и далее обрабатывается в зависимости от потребностей, например, с помощью соответствующего программного обеспечения, реализуемого на портативном компьютере 5.
[0053] Пример динамики изменения силы, измеренной устройством 1 при обработке в закрывающей и упаковывающей машине, показан на Фиг. 4. Машина, в общем, закрывает флаконы путем фиксации резиновых пробок на краях отверстий флаконов. В частности, такая фиксация содержит этапы (i) проталкивание резиновой пробки на край отверстия флакона, (ii) помещение крышки на резиновую пробку, а также (iii) обжатие крышки вокруг резиновой пробки и края отверстия флакона.
[0054] Вернемся к Фиг. 4, на которой показан блок графического интерфейса пользователя (GUI) для специализированного программного обеспечения, реализуемого на портативном компьютере 5. GUI отображает диаграмму 7 в системе координат, имеющей x-ось 71, представляющую время обработки в секундах, и y-ось 72, представляющую измеренную силу в ньютонах. На диаграмме 7 построен график 73, представляющий силу, измеренную устройством 1.
[0055] График 73 имеет участок 731 до момента приложения давления, на котором устройство 1 помещают в машину, однако давление не прикладывается. На этом участке 731 до момента приложения давления измеренная сила равна нулю. Начиная приблизительно с 1,5 секунд, появляется участок 732 создания давления на графике 73. На этом участке можно видеть ход изменения измеренной силы в процессе сжатия резиновой пробки 2 и в процессе обжатия крышки 3. Примечательно, что измеренная сила не просто возрастает до конкретного значения, отображая давление, приложенное к резиновой пробке 2, но и силы обжатия также вносят свой вклад в измеренную силу или силу уплотнения, что приводит к более сложной кривой. Участок 732 создания давления на графике 73 имеет максимум 733, составляющий около 235 ньютонов.
[0056] График дополнительно имеет участок 734 остаточной силы, представляющий силу, измеренную после того как устройство 1 закрыто или обработано машиной. Участок 734 остаточной силы начинается примерно через 2,25 секунд. Измеренная сила уплотнения на участке 734 остаточной силы приблизительно постоянна или очень незначительно уменьшается и лежит в диапазоне от 80 ньютонов до 90 ньютонов.
[0057] Устройство 1, описанное выше, например, может использоваться для настройки машины в отношении давления, прикладываемого к флаконам для их закрытия. В частности, может выполняться следующее: размещение измерительного устройства 1 в машине вместо целевого флакона, начало получения сигнала, предоставляемого датчиком 13 силы измерительного устройства 1, управление машиной для фиксации резиновой пробки 2 на краю 1212 измерительного устройства 1, наблюдение за сигналом датчика 13 силы устройства 1 в процессе работы машины, оценка наблюдаемого сигнала, а также настройка машины в соответствии с оцененным сигналом.
[0058] Оценка наблюдаемого сигнала выполняется посредством специализированного программного обеспечения, реализуемого на портативном компьютере 5. Таким образом, задаются максимальная сила, соответствующая максимуму 733 на графике 73 диаграммы 7, и минимальная сила, соответствующая остаточной силы, представленной участком 734 остаточной силы на графике 73. Максимальная сила задается так или имеет такой размер, что резиновая пробка 2 и край 1212 не повреждаются и им не наносится вред. Минимальная сила задается так или имеет такой размер, чтобы обеспечить плотное герметичное закрытие.
[0059] Машина далее настраивается так, что сила, измеренная устройством 1 в процессе выполняемых машиной операций, не превышает максимальной силы, а также так, что остаточная сила, измеренная устройством 1 после выполняемых машиной операций, не ниже минимальной силы.
[0060] Помимо этого, устройство 1 может использоваться для наблюдения за остаточной силой в течение сравнительно длительного времени для оценки долгосрочного поведения укупоривания флаконов. Таким образом, сигнал датчика 13 силы устройства 1 отслеживается после того, как машина выполнила работу, при этом производится оценка наблюдаемого сигнала. Например, может распознаваться уменьшение силы уплотнения, что может быть связано с потерей плотности укупоривания.
[0061] На Фиг. 5 показан второй вариант осуществления измерительного устройства 19 согласно изобретению. Устройство 19 реализовано по существу идентично измерительному устройству 1 по Фиг. 2 и Фиг. 3, описанному выше. В частности, все детали и элементы, показанные на Фиг. 2 и Фиг. 3 и описанные в соответствующих разделах ранее, являются идентичными, если в дальнейшем они не описываются как отличные.
[0062] Устройство 19 имеет корпус 119, имеющий верхнюю часть 1129 и базовую часть 1119, датчик 139 силы, жесткий плунжер 129, а также блок 159 интерпретации сигнала. Поверх жесткого плунжера 129 помещены резиновая пробка 29, крышка 39 и отламывающийся элемент 49. Блок 159 интерпретации сигнала соединен с портативным компьютером 59 проводом 519.
[0063] Базовая часть 1119 корпуса 119 имеет внутреннюю камеру, в которой расположен радиопередатчик 1329 в качестве беспроводного передатчика датчика 139 силы. Поскольку датчик 139 силы имеет радиопередатчик 1329, кабельный порт не требуется. Внутренняя камера базовой части 119 закрыта с нижней стороны закрывающим винтом. Блок 159 интерпретации сигнала имеет радиоприемник 151 в качестве беспроводного приемника. Радиопередатчик 1329 и радиоприемник 159 выполнены с возможностью передачи сигнала с датчика 139 силы на блок 159 интерпретации сигнала.
[0064] Верхняя часть 129 устройства 19 имеет непрерывную боковую стенку. В частности, в отличие от верхней части 12 устройства 1 по Фиг. 1, она не имеет отверстия. Корпус 119 устройства выполнен из материала, не создающего помех для радиосвязи между датчиком 139 силы и блоком 159 интерпретации сигнала. Например, он выполнен из жесткого пластикового материала.
[0065] Данное описание и сопроводительные чертежи, иллюстрирующие аспекты и варианты осуществления настоящего изобретения, не следует рассматривать как ограничивающие формулу изобретения, определяющую объем правовой охраны изобретения. Другими словами, хотя изобретение подробно проиллюстрировано на чертежах и описано в предшествующем описании, такие чертежи и описание следует рассматривать как иллюстративные или приведенные в качестве примера, но не ограничивающие. Могут быть внесены различные изменения механического, композиционного, конструктивного, электрического и операционного характера без отступления от существа и объема данного описание и формулы изобретения. В некоторых случаях хорошо известные схемы, конструкции и технологии подробно не описывались, чтобы не усложнять понимание изобретения. Таким образом, следует понимать, что средними специалистами могут вноситься изменения и модификации, не выходя за границы объема и сущности изобретения согласно нижеследующей формуле изобретения. В частности, настоящее изобретение охватывает дополнительные варианты осуществления, имеющие любые сочетания признаков из различных вариантов осуществления, описанных выше и ниже.
[0066] Данное раскрытие также охватывает все дополнительные элементы, показанные на Фигурах по отдельности, хотя они могут быть не описаны в вышеприведенном или нижеследующем описании. Кроме того, одиночные альтернативные решения вариантов осуществления, представленных на фигурах и в описании, а также одиночные альтернативные решения их признаков могут быть исключены из объекта изобретения. Данное раскрытие содержит объект изобретения, состоящий из признаков, определяемых в формуле изобретения или примерах осуществления, а также объект изобретения, содержащий упомянутые признаки.
[0067] Помимо этого, в формуле изобретения термин "содержащий" не исключает наличия других элементов или этапов, а неопределенный артикль "a" или "an" не исключает множественности. Единственный элемент или этап может выполнять функции нескольких элементов или этапов, перечисленных в формуле изобретения. Тот факт, что определенные меры упоминаются во взаимно отличных зависимых пунктах формулы изобретения, не означает, что сочетание этих мер не может быть использовано с выгодой. Термины ʺпо существуʺ, ʺоколоʺ, ʺприблизительноʺ и т.п. в сочетании с атрибутом или значением величины, в частности, также определяют точное значение атрибута или точное значение величины соответственно. Термин ʺоколоʺ, используемый применительно к заданному численному значению или диапазону, относится к значению или диапазону, составляющему величину, например, в пределах 20%, в пределах 10%, в пределах 5% или в пределах 2% от заданного значения или диапазона. Компоненты, описанные как связанные или соединенные, могут быть электрически или механически соединены напрямую, либо они могут быть соединены опосредованно через один или несколько промежуточных компонентов. Ни одну из ссылочных позиций в формуле изобретения не следует толковать как ограничивающую объем притязаний формулы изобретения.
Настоящее изобретение относится к измерительному устройству для измерения силы, действующей на край отверстия контейнера, такого как флакон. Заявленная группа изобретений включает измерительное устройство для измерения силы, действующей на край отверстия целевого флакона, и способ регулирования машины для закрытия флакона путем фиксации резиновой пробки на краю отверстия флакона. Причем измерительное устройство содержит: корпус, имеющий внутреннее пространство, а также отверстие для доступа во внутреннее пространство с наружной стороны корпуса, жесткий плунжер, имеющий край, форма которого эквивалентна форме края отверстия целевого флакона, а также датчик силы, при этом жесткий плунжер проходит через отверстие корпуса во внутреннее пространство корпуса, край жесткого плунжера расположен снаружи корпуса, датчик силы расположен во внутреннем пространстве корпуса и жесткий плунжер способен перемещаться относительно корпуса и соединен с датчиком. Согласно способу регулирования машины для закрытия флакона размещают измерительное устройство в машине вместо флакона, начинают получать сигнал, предоставляемый датчиком измерительного устройства, управление машиной для фиксации резиновой пробки на краю измерительного устройства, наблюдают за сигналом датчика силы измерительного устройства в процессе работы машины, оценивают наблюдаемый сигнал и регулируют машину в соответствии с оцененным сигналом. Технический результат заключается в обеспечении повышения точности регулировки давления или силы, прикладываемых в процессе первичного упаковывания и после него. 2 н. и 14 з.п. ф-лы, 5 ил.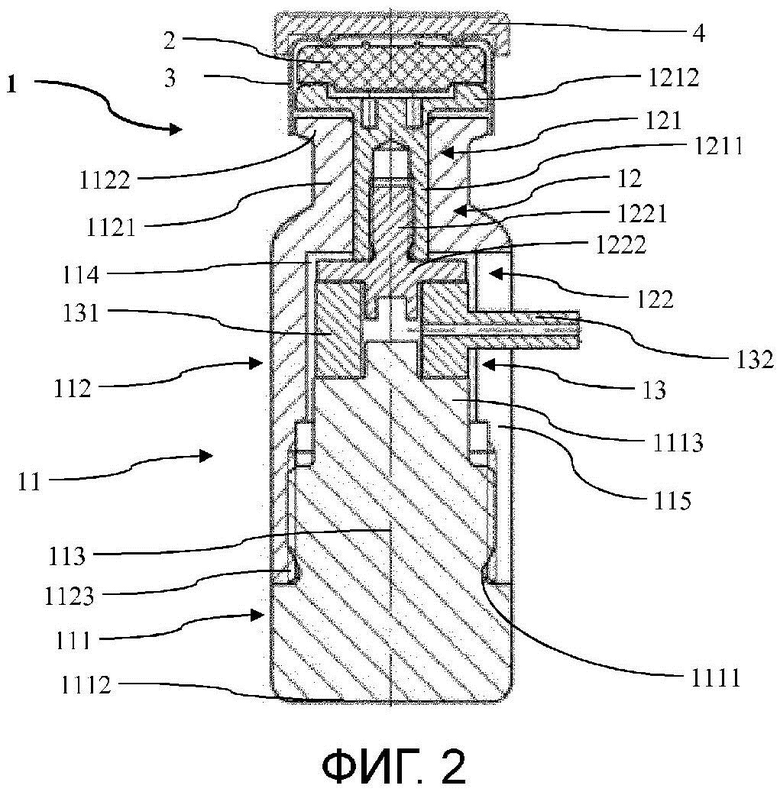
1. Измерительное устройство (1; 19) для измерения силы, действующей на край (640) отверстия целевого флакона (60), содержащее:
корпус (11; 119), имеющий внутреннее пространство (114), а также отверстие для доступа во внутреннее пространство (114) с наружной стороны корпуса (11; 119),
жесткий плунжер (12; 129), имеющий край (1212), форма которого эквивалентна форме края (640) отверстия целевого флакона (60), а также
датчик (13; 139) силы, при этом:
жесткий плунжер (12; 129) проходит через отверстие корпуса (11; 119) во внутреннее пространство (114) корпуса (11; 119),
край (1212) жесткого плунжера (12; 129) расположен снаружи корпуса (11; 119),
датчик (13; 139) силы расположен во внутреннем пространстве (114) корпуса (11; 119) и
жесткий плунжер (12; 129) способен перемещаться относительно корпуса (11; 119) и соединен с датчиком (13; 139).
2. Измерительное устройство (1; 19) по п.1, в котором жесткий плунжер (12; 129) выполнен с возможностью линейного перемещения относительно корпуса (11; 119).
3. Измерительное устройство (1; 19) по п.1 или 2, имеющее высоту, по существу идентичную высоте целевого флакона (60).
4. Измерительное устройство (1; 19) по любому из предшествующих пунктов, в котором корпус (11; 119) и жесткий плунжер (12; 129) имеют внешнюю форму, по существу идентичную внешней форме целевого флакона (60).
5. Измерительное устройство (1; 19) по любому из предшествующих пунктов, в котором датчик (13; 139) силы содержит пьезоэлектрический элемент (131; 1319).
6. Измерительное устройство (1; 19) по любому из предшествующих пунктов, содержащее блок (15; 159) интерпретации сигнала для оценки сигнала, генерируемого датчиком (13; 139), причем блок (15; 159) интерпретации сигнала расположен снаружи корпуса (11; 119) и соединен с датчиком (13; 139).
7. Измерительное устройство (1; 19) по п.6, в котором датчик (13; 139) силы имеет беспроводной передатчик (1329) для передачи сигнала в блок (15; 159) интерпретации сигнала, а блок (15; 159) интерпретации сигнала имеет беспроводной приемник (1519) для приема сигнала с датчика (13; 139) силы.
8. Измерительное устройство (1; 19) по любому из предшествующих пунктов, в котором жесткий плунжер (12; 129) имеет головную часть (121), содержащую край (1212), и поршневой участок (1211), проходящий через отверстие корпуса (11; 119) во внутреннее пространство (114) корпуса (11; 119).
9. Измерительное устройство (1; 19) по любому из предшествующих пунктов, в котором корпус (11; 119) имеет горловину (1121), имеющую проходной канал, заканчивающийся на одной стороне в отверстии и на другой стороне во внутреннем пространстве (114), и фланец (1122), образованный вокруг отверстия и выступающий поверх горловины (1121).
10. Измерительное устройство (1; 19) по пп.8 и 9, в котором край (1212) головной части (121) жесткого плунжера (12; 129) выступает поверх горловины (1121) корпуса (11; 119) и располагается рядом с фланцем (1122) корпуса (11; 119) и поршневой участок (1211) головной части (121) жесткого плунжера (12; 129) проходит в проходной канал горловины (1121) корпуса (11; 119) к внутреннему пространству (114) корпуса (11; 119).
11. Измерительное устройство (1; 19) по п.10, в котором жесткий плунжер (12; 129) содержит соединительную часть (122), имеющую соединитель (1221) поршня и фланцеобразный соединитель (1222) датчика, противоположный соединителю (1221) поршня, причем соединительная часть (122) выполнена с возможностью отделения от головной части (121) и соединитель (1221) поршня соединительной части (122) выполнен с возможностью соединения с поршневым участком (1211) головной части (121), при этом соединитель (1222) датчика соединительной части (122) выступает поверх горловины (1121) корпуса (11; 119) и соединитель (1222) датчика контактирует с датчиком (13; 139) силы во внутреннем пространстве (114) корпуса (11; 119).
12. Измерительное устройство (1; 19) по любому из предшествующих пунктов, в котором корпус (11; 119) имеет верхнюю часть (112) и базовую часть (111), причем отверстие корпуса (11; 119) расположено в верхней части (112), а базовая часть (111) выполнена с возможностью размещения на поверхности, при этом верхняя часть (112) выполнена с возможностью отделения от базовой части (111).
13. Измерительное устройство (1; 19) по п.12, в котором верхняя часть (112) корпуса (11; 119) и базовая часть (111) корпуса (11; 119) имеют резьбу (1111) и охватываемый участок (1123), вместе образующие винтовое соединение.
14. Способ регулирования машины для закрытия флакона (60) путем фиксации резиновой пробки (2; 20; 29) на краю (640) отверстия флакона (60), причем при упомянутой фиксации резиновой пробки (2; 20; 29) на краю (640) отверстия флакона (60) проталкивают резиновую пробку (2; 20; 29) на край (640) отверстия флакона (60), помещают крышку (3; 30; 39) на резиновую пробку (2; 20; 29) и обжимают крышку (3; 30; 39) вокруг резиновой пробки (2; 20; 29) и края (1212) отверстия флакона (60), при этом согласно способу:
размещают измерительное устройство (1; 19) по любому из предшествующих пунктов в машине вместо флакона (60),
начинают получать сигнал, предоставляемый датчиком (13; 139) измерительного устройства (1; 19),
управление машиной для фиксации резиновой пробки на краю (1212) измерительного устройства (1; 19),
наблюдают за сигналом датчика (13; 139) силы измерительного устройства (1; 19) в процессе работы машины,
оценивают наблюдаемый сигнал и
регулируют машину в соответствии с оцененным сигналом.
15. Способ по п.14, согласно которому предварительно задают максимальную силу и минимальную силу, при этом настраивая машину так, что:
сила, измеренная измерительным устройством (1; 19) в процессе выполняемых машиной операций, не превышает максимальной силы, и
остаточная сила (734), измеренная измерительным устройством (1; 19) после выполняемых машиной операций, не ниже минимальной силы.
16. Способ по п.14 или 15, согласно которому осуществляют наблюдение за сигналом датчика (13; 139) силы измерительного устройства (1; 19) после того, как машина выполнила работу, и оценивают наблюдаемый сигнал.
| US 4511044 A, 16.04.1985 | |||
| US 6769308 B1, 03.08.2004 | |||
| US 4213329 A, 22.07.1980 | |||
| УСТРОЙСТВО ДЛЯ УКУПОРКИ ФЛАКОНОВ МЕТАЛЛИЧЕСКИМИ КОЛПАЧКАМИ | 1987 |
|
SU1469768A1 |

