Изобретение относится к измерительной технике, а именно к средствам измерения угловых перемещений, и может быть использовано в различных областях, например в промышленной автоматике, в робототехнике, в частности для измерения угловых перемещений фаланг пальцев захватов антропоморфного робота и др.
Известен оптоволоконный датчик, основанный на деформации свободно установленного отрезка волокна (заявка на патент США US 005818982 A, Fiber optic sensor based upon buckling of a freely suspended length of fiber, МПК G02B 6/00, опубл. 06.10.1998 г.). Данный датчик основан на нелинейной деформации оптических волокон и оптических потерях при их изгибе. Для реализации датчика могут применяться одно - и многомодовые оптические волокна.
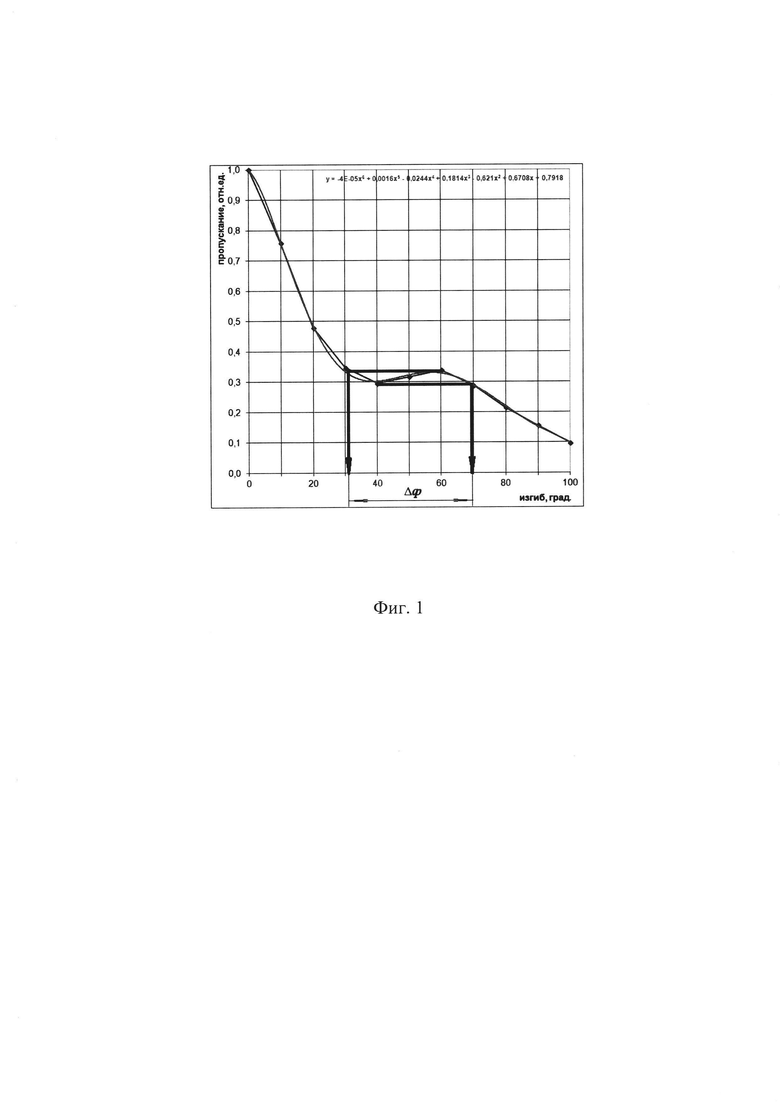
Недостатком данной конструкции датчика является неоднозначность результатов измерения (фиг. 1), возникающая из-за изменения модового состава оптического излучения, происходящего вследствие деформации оптического волокна при его изгибе.
Известен оптический датчик положения и/или формы (заявка на патент США US 20110109898, Optical position and/or shape sensing, МПК G01N 21/84, опубл. 12.05.2011 г.), принцип действия которого основан на определении изменений длины оптических путей в каждой из жил многожильного кабеля, возникающих в результате изгиба участка кабеля. При этом угол изгиба волокна пропорционален удлинению периферийных волокон. Конечный угол изгиба многожильного кабеля представляет собой сумму всех предыдущих углов изгиба кабеля. В случае использования волокон с решетками Брэгга разность фаз, измеряемая относительно исходного состояния кабеля, аккумулируется. Суммарный угол изгиба на участке кабеля определяется коэффициентом пропорциональности, длиной участка кабеля, удлинением периферийных волокон. Приведенная блок-схема устройства измерения положения и формы многожильным оптоволоконным кабелем, включает в себя следующие элементы: устройство отображения формы изгиба (монитор); сеть лазерного мониторинга; системный контроллер и процессор для обработки данных; сеть сбора данных; опрашивающая сеть; контроллер поляризации; поляризационные светоделители; оптические разветвители; фото детекторы; оптические интерферометры; оптические циркуляторы; выводные разветвители; оптоволоконный кабель, определяющий форму изгиба; волоконная катушка задержки; фарадеевское вращающее зеркало.
Недостатком данного датчика движения тела является недостаточная точность и стабильность результата измерения, большие габаритно-массовые показатели кабеля, не позволяющие использовать его в качестве датчика углового положения фаланг пальцев захватов, высокая стоимость кабеля с регулярной укладкой оптоволокна и высокая стоимость элементов и устройств обработки информации, например оптического интерферометра и др.
Известен оптоволоконный лист и датчик движения тела (патент США US 9420964, Optical fiber sheet and body motion sensor, МПК A61B 5/113, G01D 5/353, A61B 5/00, опубл. 23.08.2016 г.), содержащий волоконно-оптический лист, источник оптического излучения, компьютер. В качестве чувствительного элемента используется градиентное кварцевое оптоволокно, уложенное определенным образом на плоский листовой материал с клеевым слоем, формирующее волоконно-оптический измерительный лист. В кварцевом оптическом волокне возникают микроизгибные потери под действием нагрузки. Амплитудно-модулированный сигнал поступает в преобразователь оптического сигнала в электрический и обрабатывается программным обеспечением, установленным на ПК. Движение тела (изгиб волоконно-оптического листа) обнаруживается путем измерения изменения количества передаваемого оптического сигнала и определения избыточных потерь в полученном сигнале. Программное обеспечение позволяет различать сигналы переворота тела.
Данный датчик позволяет определить только суммарную деформацию/изгиб волоконно-оптического листа и не позволяет определить места деформации/изгиба волоконно-оптического листа. Датчик позволяет измерять только микроизгибы, что не позволяет использовать его в качестве датчика углового положения фаланг пальцев захватов.
Известен волоконно-оптический датчик изгиба и положения с изогнутыми светоизлучающими поверхностями (патент США US 5633494, Fiber optic bending and positioning sensor with selected curved light emission surfaces, МПК G01D 5/353, G02B 6/28, опубл. 27.05.1997 г.), принцип действия которого заключается в использовании в качестве чувствительного элемента участка оптоволокна, оптическая оболочка которого имеет определенную структуру. Чувствительный участок формируется в виде зубцов, глубина которых доходит до сердцевины оптоволокна, при этом целостность сердцевины не нарушается. Снаружи оптическая оболочка может быть закрыта защитной буферной оболочкой. При изгибе чувствительного участка волокна происходит нарушение закона полного внутреннего отражения и возникают потери регистрируемого оптического сигнала, пропорциональные изгибающему воздействию. Приведенное в патенте конструктивное исполнение включает чувствительное волокно с микроструктурированной оптической оболочкой в виде зубцов, защищенное буферной оболочкой, задатчики перемещения, платформы для установки волокна. При этом зависимость пропускания оптического волокна от угла изгиба имеет практически линейный характер.
Недостатком данного волоконно-оптического датчика изгиба и положения является недостаточная надежность конструкции вследствие нарушения целостности оптической оболочки.
Известна оптическая линейная измерительная система и метод (US 009470559 В2, Optical linear measurement system and method, 18.10.2016).
Оптическая линейная измерительная система и метод, определяющие движение подвижного объекта на основе измерения интенсивности оптического сигнала, распространяющегося в первом оптическом волокне, соединенным с подвижным объектом. При изменении линейного положения подвижного объекта изменяется радиус катушки первого оптического волокна. По мере изменения радиуса катушки интенсивность оптического сигнала изменения. Второе статическое стекловолокно используется для компенсации влияния температуры на результат измерения.
Недостатком данной конструкции датчика является неоднозначность результатов измерения (фиг. 1), возникающая из-за изменения модового состава оптического излучения, происходящего вследствие деформации оптического волокна при его изгибе.
Наиболее близким к настоящему изобретению по технической сути является датчик положения (патент ЕР 1867958 А2, Position Sensor, 19.12.2007 г.). Принцип работы датчика основан на определения положения шарнира, механически соединенного с отрезком оптического волокна, который в свою очередь оптически соединяет между собой лазерный светодиод и фотодетектор. Отрезок оптического волокна, свернутый в виде полукольца, в процессе поворота шарнира изменяет радиус и, как следствие, уровень оптической мощности, которая фиксируется фотодетектором и измеряется микроконтроллером.
Недостатком данной конструкции датчика положения является неоднозначность результатов измерения (фиг. 1), возникающая из-за изменения модового состава оптического излучения, происходящего вследствие деформации отрезка оптического волокна при его изгибе.
На фиг. 1 представлен участок позиционной характеристики датчика угла поворота с изгибом отрезка оптического волокна в виде полукольца диаметром 20 мм. Хорошо видно, что на участке изгибов от 26 до 70 градусов наблюдается не только резкое изменение монотонности кривой, но и возникает неоднозначность в измерении угла по величине потерь сигнала датчика, что, либо сужает диапазон измеряемых угловых перемещений до величины между двумя «провалами» позиционной характеристики, либо уменьшает разрешающую способность до величины зоны неоднозначности Δϕ.
Данный датчик положения может быть использован для контроля углового положения разнообразных объектов, в том числе угла поворота фаланг пальца захвата робота.
Техническим результатом, достигаемым при реализации предлагаемого датчика, является устранение неоднозначности результата измерения и как результат расширение диапазона измеряемых угловых перемещений и разрешающей способности датчика.
Указанный технический результат достигается тем, что с целью устранения неоднозначности результатов измерений в волоконно-оптический датчик угла поворота вводится дополнительно оптический делитель мощности, второй фотодетектор и второй отрезок оптического волокна полукольца с большим (меньшим) начальным радиусом изгиба, чем радиус первого' полукольца, и закрепленного соосно с первым полукольцом, а в микроконтроллере выделен второй ввод для измерения сигнала второго фотодетектора.
Техническая сущность предложенного технического решения поясняется чертежами, где:
- на Фиг. 1 представлен для прототипа участок позиционной характеристики датчика угла поворота с изгибом отрезка оптического волокна в виде полукольца диаметром 20 мм;
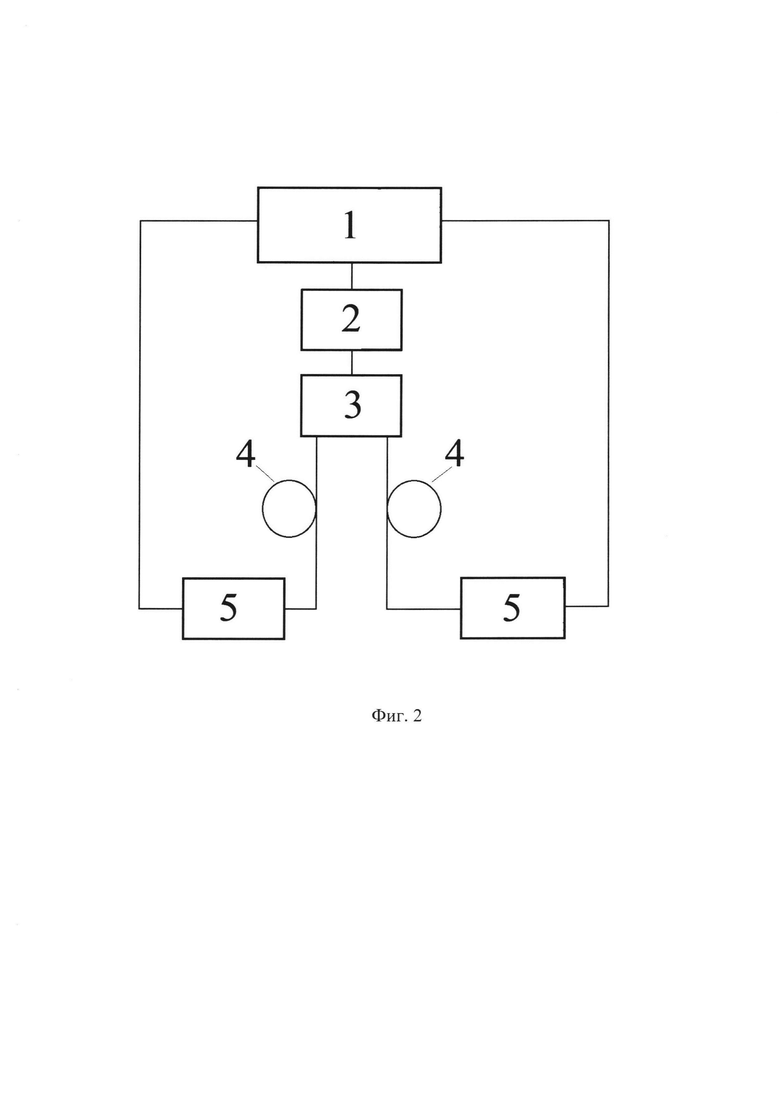
- на Фиг. 2 представлена структурная схема предлагаемого волоконно-оптического датчика угла поворота с функцией устранения неоднозначности результата измерения;
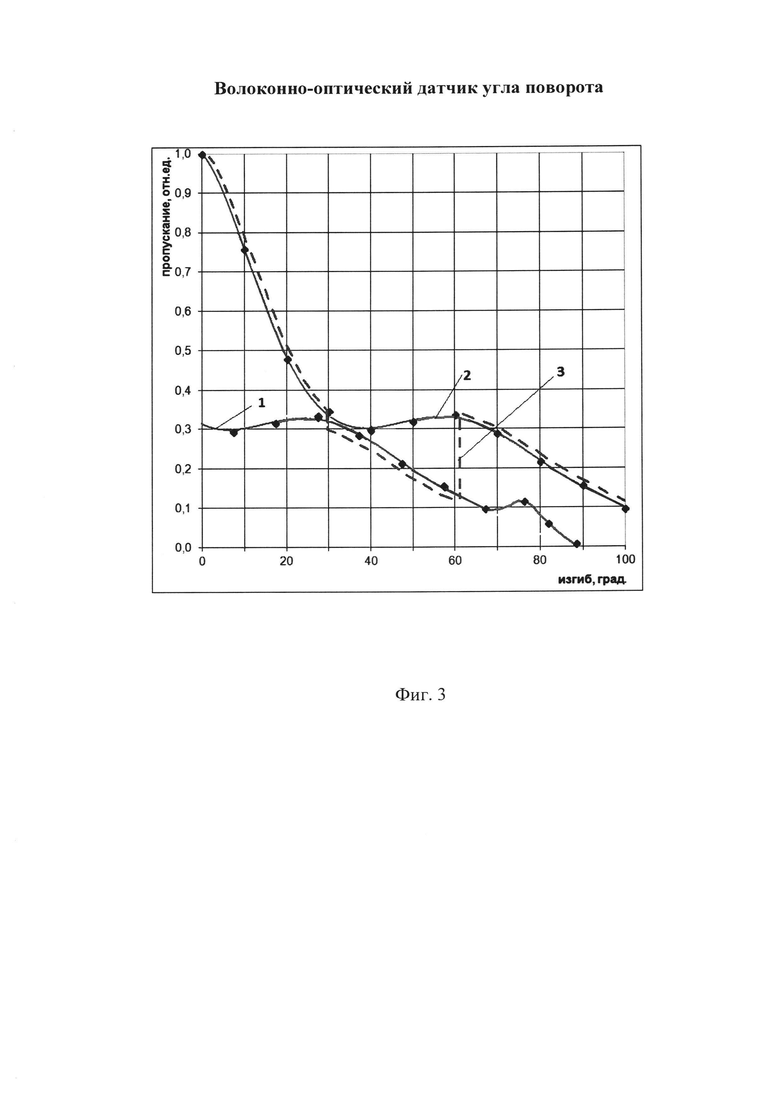
- на Фиг. 3 представлены позиционные характеристики для отрезка оптического волокна начального диаметра 16,6 мм (кривая 1) и начального диаметра 20 мм (кривая 2), а также кривая 3, поясняющая порядок коррекции результата измерения от каждого из фотодетекторов в зависимости от угла поворота и зоны неоднозначности.
Таким образом, предлагаемый волоконно-оптический датчик угла поворота содержит микроконтроллер 1, лазерный светодиод 2, оптический делитель мощности 3, фотодетекторы 5, а также два отрезка оптического волокна, свернутых в полукольца и оптически соединяющих оптический делитель мощности 2 с фотодетекторами 5 (фиг. 2).
На фиг. 3 кривая 1 приведена позиционная характеристика для начального диаметра отрезка оптического волокна 16,6 мм. Как видно из фиг. 3 зона неоднозначности для второго полукольца (кривая 1) сдвинулась из зоны углов 25-60 градусов первого полукольца (кривая 2) влево в зону углов 5-25 градусов.
Оптический делитель мощности 3 делит в равных отношениях сигнал лазерного диода 2 на два отрезка оптических волокна 4. В процессе работы датчика микроконтроллером 1 измеряются сигналы обоих фотодетекторов 5 и по величине этих сигналов учитывается результат измерения только от того отрезка оптического волокна (полукольца), позиционная характеристика которого не имеет неоднозначности на данном участке характеристики. На фиг. 3 кривая 3 поясняет порядок учета результат измерения от каждого из отрезков оптического волокна в зависимости от угла поворота и зоны неоднозначности.
В целях увеличения чувствительности датчика возможно использование отрезков оптических волокон, свернутых в виде полных колец.
Список источников
1. Заявка на патент США US 005818982 A, Fiber optic sensor based upon buckling of a freely suspended length of fiber, МПК G02B 6/00, опубл. 06.10.1998 г.
2. Зявка на патент США US 20110109898, Optical position and/or shape sensing, МПК G01N 21/84, опубл. 12.05.2011 г.
3. Патент США US 9420964, Optical fiber sheet and body motion sensor, МПК A61B 5/113, G01D 5/353, A61B 5/00, опубл. 23.08.2016 г.
4. Патент США US 5633494, Fiber optic bending and positioning sensor with selected curved light emission surfaces, МПК G01D 5/353, G02B 6/28, опубл. 27.05.1997 г.
5. Патент США US 009470559 В2, Optical linear measurement system and method, 18.10.2016 г.
6. Патент ЕР 1867958 A2, Position Sensor, опубл. 19.12.2007 г.
7. Матюнин C.A. Волоконно-оптическая система измерения угловых перемещений фаланг пальцев руки антропоморфного робота. Известия ЮФУ. Технические науки, N 1, с. 240-252, Южный федеральный университет, Ростов-на-Дону, 2016 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Волоконно-оптический датчик угла поворота | 2018 |
|
RU2688596C1 |
| ОПТОВОЛОКОННЫЙ ДАТЧИК ТОКА СО SPUN ВОЛОКНОМ И ТЕМПЕРАТУРНОЙ КОМПЕНСАЦИЕЙ | 2013 |
|
RU2627021C2 |
| СЕНСОРНОЕ УСТРОЙСТВО СО ВСТРОЕННЫМ РАСЩЕПИТЕЛЕМ ЛУЧА | 2016 |
|
RU2724458C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ТОКА | 2022 |
|
RU2785967C1 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАПРЯЖЕННОСТИ ЭЛЕКТРИЧЕСКОГО ПОЛЯ | 2013 |
|
RU2539130C1 |
| ИНТЕРФЕРОМЕТРИЧЕСКИЙ ДАТЧИК | 2015 |
|
RU2677126C2 |
| Способ симплексной передачи данных по оптическому волокну кабельной линии | 2019 |
|
RU2702983C1 |
| СИСТЕМА ДЛЯ АДРЕСНОГО КОНТРОЛЯ НЕЙРОНОВ МОЗГА ЖИВЫХ СВОБОДНОПОДВИЖНЫХ ЖИВОТНЫХ НА ОСНОВЕ РАЗМЫКАЕМОГО ВОЛОКОННО-ОПТИЧЕСКОГО ЗОНДА С МНОГОКАНАЛЬНЫМИ ВОЛОКНАМИ | 2016 |
|
RU2639790C1 |
| Способ контроля прочности оптического волокна | 2020 |
|
RU2743737C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ТОКА | 2010 |
|
RU2451941C1 |
Изобретение относится к измерительной технике, а именно к средствам измерения угловых перемещений. Волоконно-оптический датчик угла поворота состоит из микроконтроллера, лазерного диода, оптического делителя мощности, фотодетектора, двух отрезков оптического волокна, свернутых в полукольца и оптически соединяющих лазерный диод с фотодетекторами. Оптический делитель мощности делит в равных отношениях сигнал лазерного диода на два отрезка оптического волокна. При этом для устранения неоднозначности результата измерения отрезки оптического волокна выполнены разного радиуса. Технический результат - расширение диапазона измеряемых угловых перемещений и разрешающей способности датчика. 1 з.п. ф-лы, 3 ил.
Волоконно-оптический датчик угла поворота на фалангах пальцев захвата, состоящий из микроконтроллера, лазерного диода, фотодетектора, отрезка оптического волокна, свернутого в полукольцо и оптически соединяющего лазерный диод с фотодетектором, причем концы полукольца неподвижно закреплены на фалангах пальцев, а полукольцо расположено с возможностью изменения радиуса при угловом повороте, отличающийся тем, что в датчик введены оптический делитель мощности, второй отрезок оптического волокна и второй фотодетектор, при этом оптический делитель мощности делит в равных отношениях сигнал лазерного диода на два отрезка оптического волокна, а второй отрезок оптического волокна свернут в полукольцо большего (меньшего), чем у первого оптического волокна радиуса.
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК УГЛА ПОВОРОТА | 2005 |
|
RU2290606C1 |
| Прибор для измерения глубины разъеденных ржавчиной мест в котлах | 1925 |
|
SU5561A1 |
| Саморазгружающаяся платформа | 1925 |
|
SU5321A1 |
| US 4323310 A1, 06.04.1982 | |||
| Абсолютный оптический однооборотный угловой энкодер | 2017 |
|
RU2645880C1 |
| DE 102006024179 A1, 04.01.2007. | |||

