Изобретение относится к устройствам для измерения магнитных величин с помощью приборов основанных на эффекте Холла. Оно может быть использовано в устройствах линейного или порогового преобразования выходного сигнала датчика Холла в выходное напряжение, выходной ток или выходной код встроенного последовательного интерфейса.
В настоящее время выпускается большое количество всевозможных микросхем датчиков магнитного поля на основе кремниевых (полупроводниковых) датчиков Холла (ДХ). Проработаны и описаны характеристики полупроводниковых структур, используемых в ДХ, геометрии ДХ, способы подключения ДХ, методы компенсации смещения начального напряжения ДХ, аналоговых и цифровых методов первичной обработки ДХ их линеаризации, термокомпенсации и нормализации. [1-4]
Известно устройство, описанное в [1-2] «Микросхема высокоскоростного Холл сенсора», содержащее в своем составе счетверенный элемент Холла с динамической квадратурной компенсацией напряжений смещения, дифференциальный операционный усилитель с программируемым коэффициентом усиления и стабилизацией (компенсацией) дрейфа нуля, температурный датчик, программируемый фильтр нижних частот, аналоговый сумматор для компенсации начального и температурного напряжений смещения, ограничитель выходного напряжения, выходной буферный усилитель, встроенный стабилизатор напряжения, встроенный генератор тактовой частоты и арифметическое устройство с блокомэлектрически перепрограммируемого ПЗУ, а также специализированный блок последовательного интерфейса от ф. MELEXIS [5].
Недостаток этого устройства заключается в том, что микросхема, не смотря на достаточно сложное арифметическое устройство, может выполнять ограниченное количество функций. В ней возможно провести регулировку чувствительности за счет регулировки внутренних коэффициентов усиления, регулировку полосы пропускания, регулировку напряжения смещения, компенсацию температурного коэффициента смещения. Форма выдачи результата измерения один единственный - в виде линейного аналогового сигнала без возможности коррекции исходной нелинейности передаточной характеристики «магнитная индукция - выходное напряжение»
Известно устройство [3] содержащее Датчик Холла, управляемый резистором источник питания, микроконтроллер аналоговые входы которого присоединены к контактам датчика Холла. Выбор измеряемого напряжения (на выходе датчика Холла) осуществляется программно коммутатором, входящим в микроконтроллер, направление тока через датчик Холла задается ключами К1-К8, управляемыми программно через буфер, входящий в микроконтроллер. Опорное напряжение пропорциональное току i0 через датчик Холла подается на микроконтроллер с резистора (R2) что исключает погрешность, связанную с нестабильностью тока i0. Программируемый усилитель, входящий в микроконтроллер, задает коэффициент усиления, такой чтобы аналого-цифровой преобразователь, входящий в микроконтроллер, использовал полный динамический диапазон. Оцифрованные преобразователем данные заносятся в память блока управления, входящего в микроконтроллер, который также осуществляет программное управление процессом измерения, хранит зависимость константы Холла от остаточного напряжения, производит необходимые вычисления и выводит результаты на индикацию. В момент коммутации и до окончания переходных процессов в измерительной цепи и действия коммутационных помех входы микроконтроллера программно блокируются. Измерение на постоянном токе в установившемся режиме исключает как коммутационные, так и фазовые помехи.
Это устройство выбрано в качестве прототипа предложенного решения.
Недостаток этого устройства заключается в том, что несмотря на применение достаточно мощного по производительности, набору встроенных периферийных модулей (коммутаторы, генераторы тока) и большому объему памяти микроконтроллера, в схему введены внешние по отношению к микроконтроллеру коммутаторы и резисторы, которые имеют собственные технологические разбросы, требующие дополнительной компенсации. Это приводит к тому, что от образца к образцу возникают неучтенные погрешности, требующие дополнительной калибровки и компенсации.
Кроме того, несмотря на то, что в составе микроконтроллера [6] имеются два программируемых стабильных генератора тока, питание датчика осуществляется через внешний токозадающий резистор в результате чего возникает зависимость тока датчика от внешнего напряжения питания и необходимость ввести в алгоритм методы борьбы с этим явлением.
Также недостатком является то что вместо прямого измерения температуры датчика Холла с помощью встроенного в микроконтроллер датчика температуры используется некая зависимость напряжения Холла от напряжения смещения [3].
Технический результат предполагаемого изобретения заключается в том, что используя в качестве прецизионного измерителя параметров магнитного поля датчик Холла с элементами динамической компенсации начальных смещений и смещений обусловленных изменением температуры окружающий среды соединенный последовательно с предварительным операционным усилителем со встроенной компенсацией начального смещения, в устройство введены узлы, обеспечивающие расширение функциональных возможностей устройства в части получения различных передаточных характеристик «измеряемое магнитное поле - выходной сигнал», крутизны и начального положения этих передаточных характеристик, а также формы представления выходного сигнала в виде напряжений, токов, временных и логических параметров преобразования «измеряемое магнитное поле - параметры выходного сигнала», в том числе и в виде последовательных данных в известных протоколах.
Указанный технический результат достигается тем, что в устройстве с целью компенсации напряжения смещения выходного сигнала полупроводникового элемента Холла, вызванного технологической погрешностью, механическими и температурными напряжениями, введена квадратурная коммутация выводов [7], [8], и дифференциальный усилитель с подавлением собственного напряжения смещения путем «чоперной коммутации» [9], [10]. Одновременно с этим дифференциальный усилитель обладает программируемым коэффициентом усиления, для расширения диапазона измеряемых параметров магнитного поля. С целью подавления зависимости выходного сигнала от напряжения элемент Холла, узел квадратурной коммутации и дифференциальный операционный усилитель запитаны от стабилизатора напряжения, и образуют датчик магнитного поля. Выход такого датчика через мультиплексор выходных сигналов присоединен к выходу устройства, состоянием мультиплексора выходных сигналов управляет регистр, определяющий конфигурацию устройства. Для задания набора реализуемых функций, настройки и калибровки параметров встроенных алгоритмов работы устройство содержит микроконтроллер, имеющий в своем составе арифметическо-логическое устройство, постоянное запоминающее устройство (ПЗУ) и оперативную память, а также последовательный интерфейс, позволяющий пользователям устройства производить запись данных во встроенную ПЗУ, определяющих режимы и подрежимы работы устройства.
С целью получения нескольких передаточных характеристик по чувствительности выходной буферный усилитель является одновременно и усилителем с программируемым коэффициентом усиления, задаваемым посредством регистра ПЗУ определяющего значение чувствительности микросхемы по магнитному полю.
Существует вариант устройства, в котором с целью смещения начала и конца диапазона измерения магнитного поля выходу датчика магнитного поля присоединен первый выход аналогового сумматора, ко второму входу аналогового сумматора присоединен ЦАП выходное значение которого определяется посредством регистра ПЗУ определяющего значение величины смещения начала и конца диапазона измерения магнитного поля.
Существует также вариант устройства, в котором что с целью компенсации линейной составляющей температурной зависимости передаточной характеристики микросхемы в состав микросхемы введен температурный датчик с линейной температурной зависимостью [10], а его выход через управляемый аттенюатор, управляемый с помощью регистра ПЗУ определяющего значением температурного коэффициента выходного напряжения линейного стабилизатора [11], компенсирующего температурную зависимость датчиков магнитного поля, присоединен к источнику опорного напряжения линейного стабилизатора.
Возможен вариант устройства, в котором с целью получения релейной (пороговой) зависимости выходного напряжения от величины магнитного поля к выходу датчика присоединен компаратора напряжения, порог срабатывания которого определяется с помощью ЦАП, выходное значение которого определяется одним из регистров, определяющего значение величины порога переключения релейной характеристики. Выход компаратора через мультиплексор выходных сигналов и логическую схему, управляемым регистром конфигураций устройства, присоединен к выходу устройства.
Возможен вариант устройства, в котором с целью получения двухпороговой релейной зависимости выходного напряжения от величины магнитного поля к выходу датчика присоединен второй компаратор напряжения, аналогичный первому, порог срабатывания которого определяется с помощью ЦАП, выходное значение которого определяется одним из регистров, определяющего значение величины порога переключения релейной характеристики. Выходы компараторов через мультиплексор выходных сигналов и логическую схему, управляемым регистром конфигураций устройства, присоединен к выходу устройства.
Существует вариант устройства, выполняющий функцию квадратурного детектора перемещений и/или тахометра. Для реализации этой функции в устройство введен второй датчик магнитного поля аналогичный первому и размещенный на максимально возможном удалении по кристаллу от первого датчика. Выход второго датчика присоединен ко входу второго компаратора. Пороги срабатывания компараторов настраиваются на среднее значение сигнала измеряемого магнитного поля. Выходы обоих компараторов присоединены к мультиплексору выходных данных через логическую схему реализующую алгоритм квадратурного или инкрементного датчика движения (литература). Далее сигнал поступает на выход микросхемы. Устройство работоспособно совместно с механическим устройством, магнитное поле в котором конструктивно разнесено по обоим датчикам и позволяет реализовать алгоритм квадратурного детектора.
Существует также вариант, в котором с целью повышения точности работы микросхемы выход датчика магнитного поля поступает на вход вычислителя в котором происходит температурная компенсация, линеаризация и нормализация значений величины магнитного поля измеренных датчиками путем вычисления полинома до 4-го порядка от двух входных переменных, температуры и измеренного значения, коэффициенты полинома должны определяться пользователем и должны быть записаны в ПЗУ, направление выдачи вычисленного значения магнитного поля также определяется регистром конфигурации микросхемы.
Существует также вариант, в котором измеренные и откалиброванные значения величины магнитного поля с целью удобства работы с устройством направляются в выходные регистры последовательного интерфейса и далее в соответствии с установленным в микроконтроллере протоколом поступают на выход устройства.
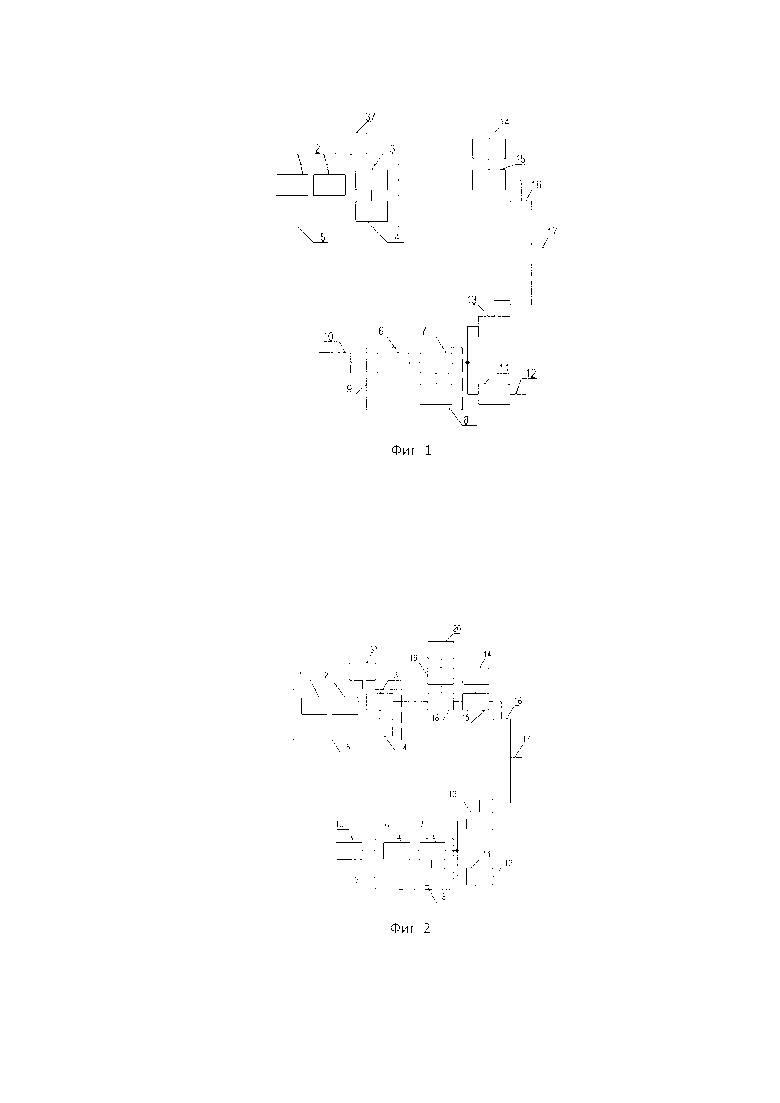
На фигуре 1 изображено устройство, содержащее датчик магнитного поля 5, составленный из полупроводникового чувствительного элемента Холла 1 с квадратурным коммутатором 2, предварительного дифференциального усилителя 3 со своим регистром управления усилением 4. Также устройство содержит микроконтроллер 9, составленный из арифметическо-логического устройства 7, оперативной памяти 6 и ПЗУ 8, управляемый тактовым генератором 10. устройство также содержит следующие периферийные узлы: последовательный интерфейс 11 с выходными линиями 12, выходной цифроаналоговый мультиплексор 16 с выходными контактами 17, управляемый регистром 13, буферный усилитель 15 с управляющим регистром 14, линейный стабилизатор напряжения 21.
На фигуре 2 изображено устройство, содержащее те же узлы и с той же нумерацией что и устройство, изображенное на фигуре 1, с добавлением аналогового сумматора 18, ЦАПа 19 и регистра 20.
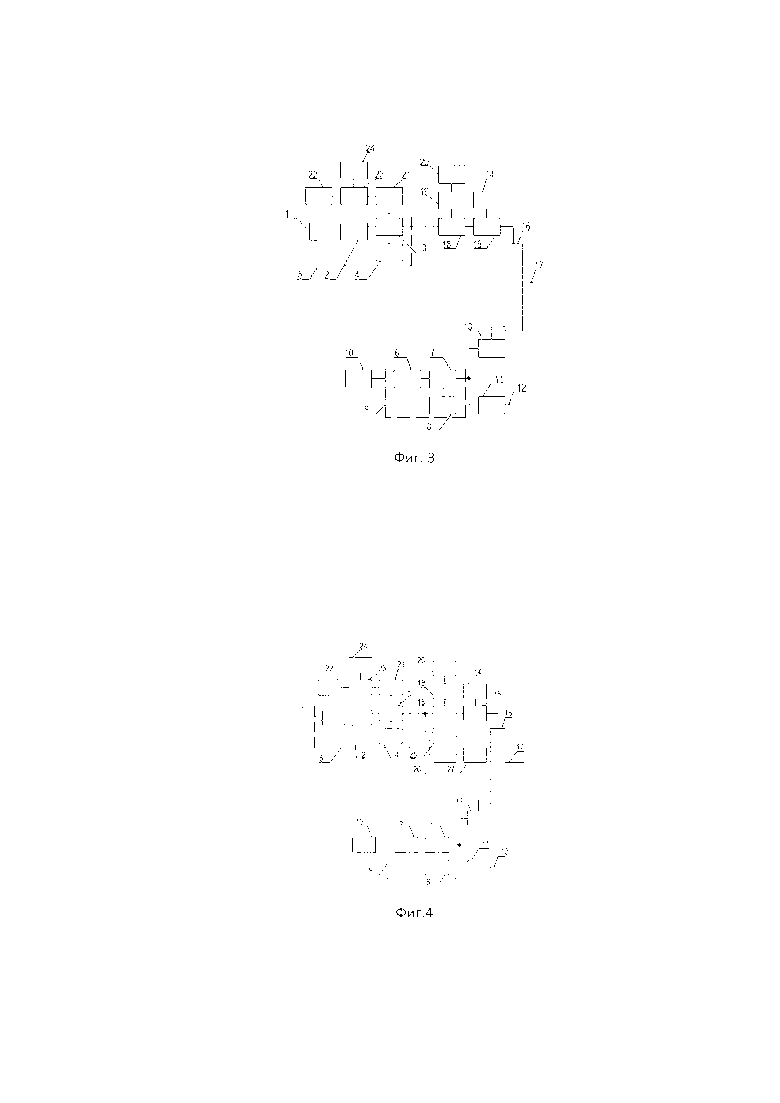
На фигуре 3 изображено устройство, содержащее те же узлы и с той же нумерацией что и устройство, изображенное на фигуре 2, с добавлением датчика температуры 22, аналогового сумматора-перемножителя 23 и регистра 24.
На фигуре 4 изображено устройство, содержащее те же узлы и с той же нумерацией что и устройство, изображенное на фигуре 3, с добавлением компаратора 25, ЦАПа 26 и регистра 27.
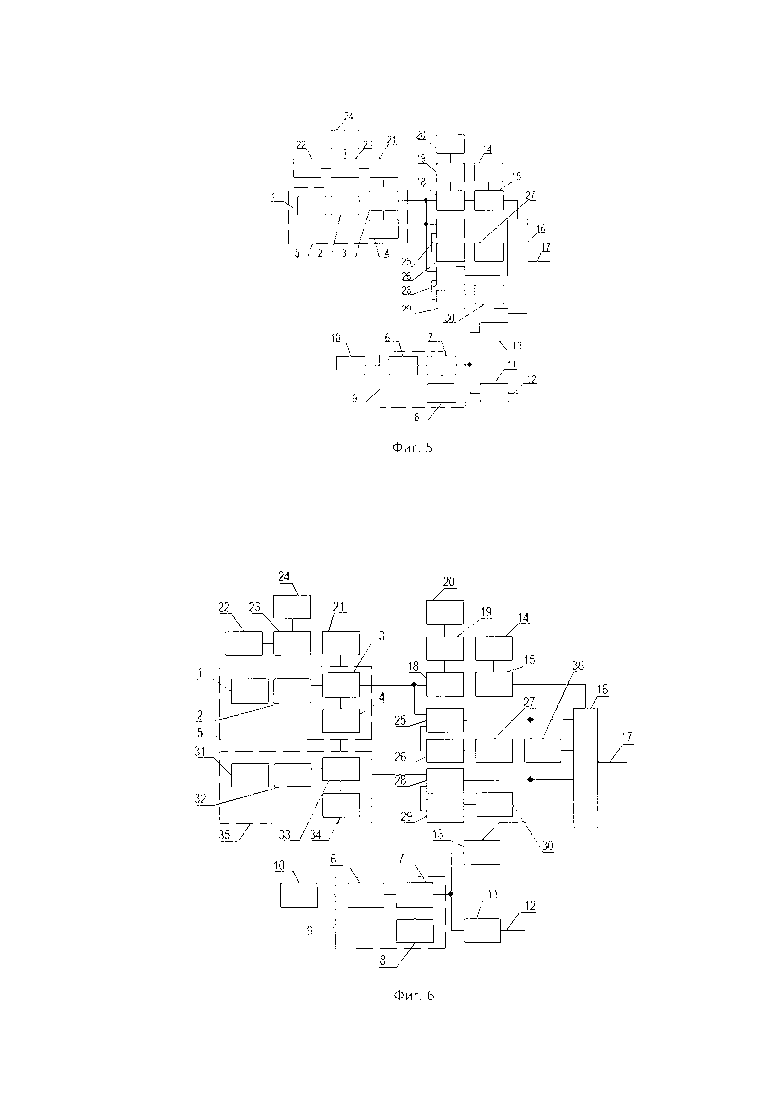
На фигуре 5 изображено устройство, содержащее те же узлы и с той же нумерацией что и устройство, изображенное на фигуре 4, с добавлением компаратора 28, ЦАПа 29 и регистра 30.
На фигуре 6 изображено устройство, содержащее те же узлы и с той же нумерацией что и устройство, изображенное на фигуре 5, с добавлением второго датчика магнитного поля 35, составленного из полупроводникового чувствительного элемента Холла 31, с квадратурным коммутатором 32, предварительного дифференциального усилителя 33 со своим регистром управления усилением 34 и логической схемы 36.
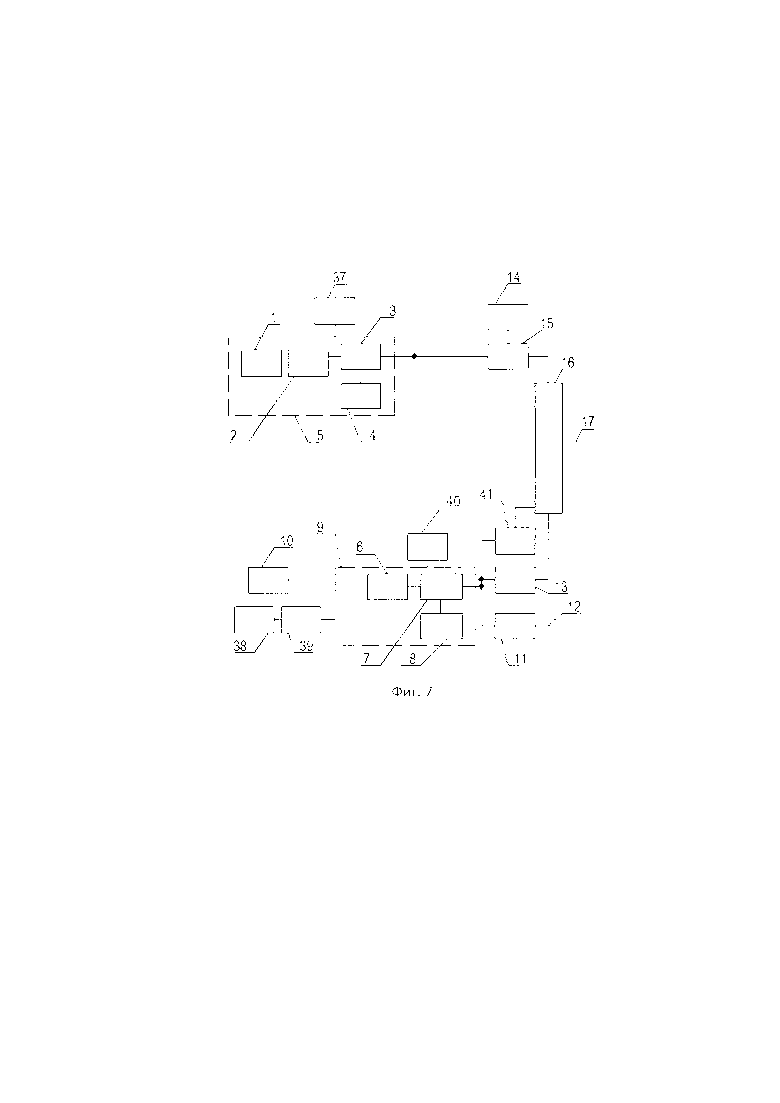
На фигуре 7 изображено устройство, содержащее те же узлы и с той же нумерацией что и устройство, изображенное на фигуре 1, с добавлением АЦП 40, дополнительного датчика температуры 38 с АЦП 39, дополнительного ЦАП 41, второго датчика магнитного поля 35, составленного из полупроводникового чувствительного элемента Холла 31, с квадратурным коммутатором 32, предварительного дифференциального усилителя 33 со своим регистром управления усилением 34 и логической схемы 36.
Устройство содержит датчик магнитного поля 5 (фиг. 1), состоящий из чувствительного элемента Холла 1, который через квадратурный коммутатор 2 присоединен ко входам предварительного дифференциального усилителя 3, коэффициент усиления которого задается управляющим регистром 4. Питание датчик осуществляется от линейного стабилизатора 21. Выход датчика 5 присоединен ко входу буферного усилителя 15, коэффициент усиления которого задается управляющим регистром 14. Выход буферного усилителя с помощью цифро-аналогового коммутатора 16 выдается на выходные контакты 17. Режим работы коммутатора определяет выход регистр 13, который управляется от встроенного микроконтроллера 9. Микроконтроллер содержит в своем составе арифметическо-логическое устройство 7, оперативную память 6 и ПЗУ 8. К микроконтроллеру также присоединены тактовый генератор 10 и последовательный интерфейс 11 со своими выводами 12.
Существует вариант устройства (фиг. 2), в котором между выходом датчика магнитного поля и входом буферного усилителя включен аналоговый сумматор 18, ко второму входу которого присоединен цифроаналоговый преобразователь 19, который в свою очередь управляется регистром 20.
Существует вариант устройства (фиг. 3), в котором вход опорного напряжения линейного стабилизатора 21 присоединен к выходу аналогового сумматора-перемножителя 23 второй вход которого присоединен к регистру 24.
Существует вариант устройства (фиг. 4), в котором выход датчика магнитного поля присоединен к первому входу компаратора 25. Ко второму входу компаратора присоединен ЦАП 26, управляемый регистром 27. Выход компаратора подается на мультиплексор 16.
Существует вариант устройства (фиг. 5), в котором к выходу датчика магнитного поля присоединен второй компаратор 28 с соответственно присоединенными к нему ЦАП 29, и управляющий регистром 30. Выход второго компаратора подается на мультиплексор 16.
Существует вариант устройства (фиг. 6), в котором введен второй датчик магнитного поля 35 полностью аналогичный первому. Выход второго датчика присоединяется ко входу второго компаратора. Выходы обоих компараторов присоединены к логическому устройству - квадратурному детектору 36 выход которого присоединен к мультиплексору 16.
Существует вариант устройства (фиг. 7), в котором к выходу датчика магнитного поля присоединен АЦП 40 выход которого подается в микроконтроллер. К выходной шине микроконтроллера присоединен ЦАП 41 выход которого подается на мультиплексор 16. Введен датчик температуры 38 выход которого через АЦП 39 присоединен к микроконтроллеру.
Работу устройства можно разделить на несколько режимов работы:
- конфигурация,
- нормализация
- калибровка и термокомпенсация
- тестирование и самодиагностика
- работа в основном режиме (один из подрежимов конфигурации)
При конфигурации выбирается:
- один из возможных режимов работы (устройство допускает совмещение некоторых режимов, например, выдача аналогового сигнала по одному выводу и релейного сигнала при достижении аналогового сигнала некоторого порога по второму выходу и одновременная выдача текущего значения магнитного поля через последовательный канал
- тактовые частоты работы отдельных узлов устройства
При нормализации задается:
- диапазон представления линейной характеристики «магнитное поле - выходной сигнал» и/или пороги срабатывания релейной характеристики, а также полярность выходной характеристики
- параметры цифровых фильтров и корректирующих полиномов при цифровой обработке сигналов датчиков
При калибровке и термокомпенсации задается:
- параметры линейной термокомпенсации
- коэффициенты полинома цифровой термокомпенсации
При тестировании и самодиагностике:
- Устройство позволяет проводить его тестирование через последовательный интерфейс как при эксплуатации, так и при проведении регламентных работ.
- Самодиагностика производится в момент включения и в случае выхода внутренних сигналов за их пределы, установленные производителем, устройство выключается.
В соответствии с фигурой 1, в основном режиме, устройство работает следующим образом. Элемент Холла (1) через устройство динамической квадратурной компенсации конструктивных и иных погрешностей (2), возникающих в элементе Холла подключен к дифференциальному операционному усилителю с динамической компенсацией напряжения смещения и регулировкой усиления (3) с помощью локального регистра управления (4) и совокупность этих приборов образует датчик магнитного поля с переменной крутизной преобразования «магнитное поле - выходное напряжение» с низким дрейфом выходного напряжения и малым уровнем шумов (5). Для подавления зависимости выходного сигнала датчика от напряжения питания, весь датчик питается от встроенного в устройство стабилизатора напряжения (21). Далее сигнал поступает на выходной буферный усилитель (15) и на выход устройства (17). Буферный усилитель с помощью встроенного аттенюатора позволяет провести нормализацию выходного сигнала с точностью до ±0,25% (например, для обеспечения взаимозаменяемости устройств) и управляется от регистра (14). Встроенный последовательный интерфейс (11), совместно со встроенным микроконтроллером (8), обеспечивает режимы конфигурации устройства его настройку и калибровку. Для этого в составе микроконтроллера имеется арифметическо-логическое устройство (7), модули памяти ПЗУ и ОЗУ (8) и оперативные регистры. Работу всего устройство синхронизирует тактовый генератор (10). Для обеспечения различных режимом работы устройства на его выходе имеется цифроаналоговый коммутатор (16), управляемый регистром конфигурации (13). Все периферийные регистры управления входящие в состав устройства присоединены к управляющей шина микроконтроллера, что расширяет функциональные возможности устройства
В соответствии с фигурой 2, в основном режиме, устройство работает следующим образом.
В регистре конфигурации устройства (13) устанавливается режим, соответствующий выдаче аналогового сигнала со смещением шкалы преобразования «магнитное поле - выходное напряжение». Для этого между датчиком и выходным буферным усилителем подключается аналоговый сумматор (18). На второй вход которого подается напряжение смещения от цифро-аналогового преобразователя (19), управляемого регистром задания величины смещения (20). Настройка и калибровка устройства производится также, как это описано выше.
В соответствии с фигурой 3, в основном режиме, устройство работает следующим образом.
В регистре конфигурации устройства (13) устанавливается режим, соответствующий выдаче аналогового сигнала с линейной теромокомпенсацией крутизны шкалы преобразования «магнитное поле - выходное напряжение». Для этого в устройство включен элемент с линейной зависимостью выходного напряжения от температуры (22) и через аналоговый сумматор-перемножитель (23) - это напряжение добавляется в источник опорного напряжения линейного стабилизатора напряжения. На второй вход сумматора-перемножителя подается напряжение смещения от управляющего регистра (24).
В соответствии с фигурой 4, в основном режиме, работает следующим образом.
В регистре конфигурации устройства (13) устанавливается режим, соответствующий выдаче релейного сигнала при достижении измеряемого магнитного поля заданного порога. Для этого в устройство на выходе датчика включен первый вход компаратора (25), а на второй вход компаратора подается напряжение от цифроаналогового преобразователя (26), управляемого регистром заданного порога (27). Выходной сигнал в соответствии с данными регистра конфигурации через выходной мультиплексор поступает на один из выходов устройства. В этом режиме возможна также и термостабилизация порога переключения по уровню магнитного поля.
В соответствии с фигурой 5, в основном режиме, устройство работает следующим образом.
В регистре конфигурации устройства (13) устанавливается режим, соответствующий выдаче двух порогового релейного сигнала при достижении измеряемого магнитного поля заданного диапазона. Для этого в устройство на выходе датчика включен второй компаратор (28) аналогичный первому со своим цифроаналоговым преобразователем заданного порога (29) и управляющим регистром (30). Выходной сигнал обоих компараторов логически обрабатывается в выходном мультиплексоре и в соответствии с данными регистра конфигурации поступает на один из выходов устройства.
В соответствии с фигурой 6, в основном режиме, устройство работает следующим образом.
В регистре конфигурации устройства (13) устанавливается режим, соответствующий режиму квадратурного декодера и/или тахометра. Для этого в устройство введен второй датчик магнитного поля (35), расположенный на максимальном удалении по кристаллу от первого и второй компаратор присоединяется к выходу второго датчика. Регистры цифроаналоговых преобразователей настраиваются на середину напряжения сигналов от датчиков. Выходной сигнал обоих компараторов логически обрабатывается в квадратурном детекторе (36) и далее в соответствии с данными регистра конфигурации поступает на выходы устройства. Настройка и калибровка устройства, в части порогов срабатывания компараторов, должна производиться в составе имитатора вращающегося объекта или на самом объекте.
В соответствии с фигурой 7, в основном режиме, устройство работает следующим образом.
В регистре конфигурации устройства (13) устанавливается режим, соответствующий выдаче сигнала на выход устройства после его обработки в микроконтроллере. Этот режим можно использовать совместно с любым из выше приведенных режимов, и позволяет повысить точность преобразования «магнитное поле - выходное напряжение», а также ввести цифровую фильтрацию сигнала при высоком уровне помех и дестабилизирующих факторов. Для этого в устройство на выходе каждого датчика включены аналого-цифровые преобразователи (40), введен датчик температуры (38) со своим аналого-цифровым преобразователем (39) и на выходе микроконтроллера введен цифро-аналоговый преобразователь (41). Сигналы от датчиков магнитного поля и датчика температуры поступают в микроконтроллер, где подвергаются цифровой фильтрации, линеаризации, нормализации и термокомпенсации выдаются либо в цифровом виде через встроенный последовательный интерфейс (11), либо в аналоговом виде на заданный выход устройства. Настройка и калибровка устройства должна производится с применением специализированного программного обеспечения, обеспечивающего расчет коэффициентов корректирующих полиномов, применяемых в микроконтроллере и обеспечивающих заданную точность работы устройства.
При выполнении устройства в соответствии с фигурой 1 достигается следующий результат. Устройство может измерять линейно изменяющееся магнитное поле с помощью встроенного датчика магнитного поля (5) в диапазоне, заданном регистрами (4) и (14) определяющими коэффициент передачи «магнитное поле - выходное напряжение». Регистр конфигурации (13), определяет на какой выход будет подан полученный сигнал. Встроенный последовательный интерфейс (11), совместно со встроенным микроконтроллером (9), обеспечивает режимы конфигурации устройства его настройку и калибровку. Для этого в составе микроконтроллера имеется 32-х разрядное арифметическо-логическое устройство (7), модули памяти ПЗУ и ОЗУ (8) и оперативные регистры. Все периферийные регистры управления входящие в состав устройства присоединены к управляющей шина микроконтроллера.
При выполнении устройства в соответствии с фигурой 2 достигается следующий результат.
Устройство может измерять линейно изменяющееся магнитное поле со смещением шкалы преобразования «магнитное поле - выходное напряжение». Для этого между датчиком и выходным буферным усилителем подключается аналоговый сумматор (18). На второй вход которого подается напряжение смещения от цифроаналогового преобразователя (19), управляемого регистром задания величины смещения (20). Устройство может быть настроено на измерение только «условно положительного» или «условно отрицательного» относительно осей датчика магнитного поля.
При выполнении устройства в соответствии с фигурой 3 достигается следующий результат.
Устройство может измерять линейно изменяющееся магнитное поле, имеющее температурную зависимость, обусловленную конструктивным решением устройства и требующее компенсацию этой температурной зависимости. Для этого в устройство включен элемент с линейной зависимостью выходного напряжения от температуры (22) и через аналоговый сумматор-перемножитель (23) - это напряжение добавляется в источник опорного напряжения линейного стабилизатора напряжения. На второй вход сумматора-перемножителя подается напряжение смещения от цифроаналогового преобразователя, управляемого регистром (24).
При выполнении устройства в соответствии с фигурой 4 достигается следующий результат.
Устройство может выдавать логический сигнал при достижении магнитного поля некого заданного уровня. Для этого в устройство на выходе датчика (5) включен первый вход компаратора (25), а на второй вход компаратора подается напряжение от цифро-аналогового преобразователя (26), управляемого регистром задания порога (27). Выходной сигнал в соответствии с данными регистра конфигурации (13) через выходной мультиплексор (16) поступает на один из выходов устройства. В этом режиме также возможна и термостабилизация порога переключения по уровню магнитного поля.
При выполнении устройства в соответствии с фигурой 5 достигается следующий результат.
Устройство может выдавать логический сигнал при достижении магнитного поля некого заданного диапазона измеряемых магнитных полей, т.е осуществить двухпороговый симметричный или несимметричный контроль магнитного поля. Для этого в устройство на выходе датчика включен второй компаратор (28) аналогичный первому со своим цифроаналоговым преобразователем заданного порога (29). Выходной сигнал обоих компараторов логически обрабатывается в выходном мультиплексоре и в соответствии с данными регистра конфигурации (13) поступает на один из выходов устройства. В этом режиме также возможна и термостабилизация порогов переключения по уровню магнитного поля.
При выполнении устройства в соответствии с фигурой 6 достигается следующий результат.
Устройство может в качестве тахогенератора или инкрементного энкодера. Для этого в устройство введен второй датчик магнитного поля (35), расположенный на максимальном удалении по кристаллу от первого и второй компаратор присоединяется к выходу второго датчика. Регистры цифроаналоговых преобразователей настраиваются на середину напряжения сигналов от датчиков. Выходной сигнал обоих компараторов логически обрабатывается в квадратурном детекторе (36) и далее в соответствии с данными регистра конфигурации (13) поступает на выходы устройства. Настройка и калибровка устройства, в части порогов срабатывания компараторов, должна производиться в составе имитатора вращающегося объекта или на самом объекте.
При выполнении устройства в соответствии с фигурой 7 достигается следующий результат.
Повышается стабильность работы устройства в широком диапазоне температур и повышается точность преобразования сигнала «магнитное поле - выходной сигнал», появляется возможность устранения паразитных шумов за счет цифровой обработки сигналов датчиков во встроенном микроконтроллере. Также появляется возможность выдавать измеренный результат в цифровом виде с помощью встроенного последовательного интерфейса. Для этого в устройство на выходе каждого датчика включены аналого-цифровые преобразователи (40), введен датчик температуры (38) со своим аналого-цифровым преобразователем (39) и на выходе микроконтроллера введен цифро-аналоговый преобразователь (41). Сигналы от датчиков магнитного поля и датчика температуры поступают в микроконтроллер, где подвергаются цифровой фильтрации, линеаризации, нормализации и термокомпенсации выдаются либо в цифровом виде через встроенный последовательный интерфейс, либо в аналоговом виде на заданный выход устройства. Настройка и калибровка устройства производится с применением специализированного программно обеспечения, обеспечивающего расчет коэффициентов корректирующих полиномов, применяемых в микроконтроллере и обеспечивающих заданную точность работы устройства.
Литература
1) MLX91207, High Speed Hall Sensor 1С, Datasheet, pdf
2) Патент СССР № SU 1698860 описание изобретения к авторскому свидетельству
3) Патент РФ №2311655 описание изобретения к проекту
4) U.S. Patent 08569814
5) PTC04-DB-HALL05-Datasheet-Melexis.pdf
6) ADUC834BSZ.pdf
7) Haiyun Huang 1,2,*, Dejun Wang 1,* and Yue Xu «A Monolithic CMOS Magnetic Hall Sensor with High Sensitivity» Sensors 2015, 15, 27359-27373 www.mdpi.com/ioumal/sensors
8) Anton Bakker and Johan H. Huijsing «A CMOS Spinning-Current Hall Effect Sensor with Integrated Submicrovolt Offset Instrumentation Amplifler» Delft Institute of Microelectronics and Submicron technology, STW, 1999 10 19-01:003
9) Johan F. Witte, Kofi A.A. Makinwa, Johan H. Huijsing, «Dynamic Offset Compensated CMOS Amplifiers)) London New York 2009
10) Реза Могими, «Операционные усилители с нулевым дрейфом», ЭЛЕКТРОННЫЕ КОМПОНЕНТЫ 2011 №3
11) «Источники опорного напряжения: основные параметры и принципы проектирования» А. Смородинов КОМПОНЕНТЫ И ТЕХНОЛОГИИ ⋅ №9 '2015
12) Бараночников М.Л. Б24 Микромагнитоэлектроника. Т. 1. - М: ДМК Пресс, 2001. - 544 с. ил. (Серия «Учебник»)
13) «Что такое АЦП» http://av-assembler.ru/mc/what-is-adc.php
14) «ЦАП. Так ли все просто?» Электронные компоненты №8 2010
15) «Энкодеры. Виды и работа. Особенности и применение» https://electrosam.ru/glavnaja/slabotochnye-seti/oborudovanie/enkodery/
16) «Урок 1. Введение. Устройство микроконтроллера» http://hamlab.net/mcu/training/introduction.html статья в ВИКИПЕДИИ
17) «Лекция 8: Вспомогательные аппаратные средства микроконтроллера» НОУ ИНТУИТ www.intuit.ru
18) P.J. Munter, "A low offset spinning-current Hall plate," Sensors and Actuators, vols. A21-A23, pp. 743-746, 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| Контроллер магнитного поля | 2023 |
|
RU2799103C1 |
| МНОГОКАНАЛЬНОЕ АКУСТИКО-ЭМИССИОННОЕ УСТРОЙСТВО | 2019 |
|
RU2726278C1 |
| ЛИНЕАРИЗОВАННАЯ ЦИФРОВАЯ АВТОМАТИЧЕСКАЯ РЕГУЛИРОВКА УСИЛЕНИЯ | 1996 |
|
RU2158474C2 |
| УСТРОЙСТВО МОНИТОРИНГА ВЫСОКОВОЛЬТНЫХ ВВОДОВ И СИГНАЛИЗАЦИИ О СОСТОЯНИИ ИХ ИЗОЛЯЦИИ | 2006 |
|
RU2328009C1 |
| Цифроаналоговый генератор телевизионного сигнала | 1989 |
|
SU1654978A1 |
| Устройство для регистрации информации | 1985 |
|
SU1304170A1 |
| Цифровой магнитометр | 1984 |
|
SU1302223A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ЖИДКОСТИ | 2015 |
|
RU2602401C1 |
| ПРИЕМНИК ПРЯМОГО ПРЕОБРАЗОВАНИЯ С КВАДРАТУРНО-ТРЕХФАЗНОЙ АРХИТЕКТУРОЙ, СПОСОБ ПРЯМОГО ПРЕОБРАЗОВАНИЯ СИГНАЛА ПОСРЕДСТВОМ УКАЗАННОГО ПРИЕМНИКА И СПОСОБ УПРАВЛЕНИЯ НАСТРОЙКОЙ УКАЗАННОГО ПРИЕМНИКА | 2013 |
|
RU2542939C1 |
| УСТРОЙСТВО КОМПЛЕКСНОГО ИССЛЕДОВАНИЯ СОСТОЯНИЯ ВЕГЕТАТИВНОЙ НЕРВНОЙ СИСТЕМЫ | 2005 |
|
RU2306841C2 |
Изобретение относится к устройствам для измерения магнитных величин с помощью приборов, основанных на эффекте Холла. Оно может быть использовано в устройствах линейного или порогового преобразования выходного сигнала датчика Холла в выходное напряжение, выходной ток или выходной код встроенного последовательного интерфейса. Сущность изобретения заключается в том, что подобное решение обеспечивает расширение функциональных возможностей устройства в части получения различных передаточных характеристик «измеряемое магнитное поле - выходной сигнал», крутизны и начального положения этих передаточных характеристик, а также формы представления выходного сигнала в виде напряжений, токов, временных и логических параметров преобразования «измеряемое магнитное поле - параметры выходного сигнала», в том числе и в виде последовательных данных в известных протоколах. 7 з.п. ф-лы, 7 ил.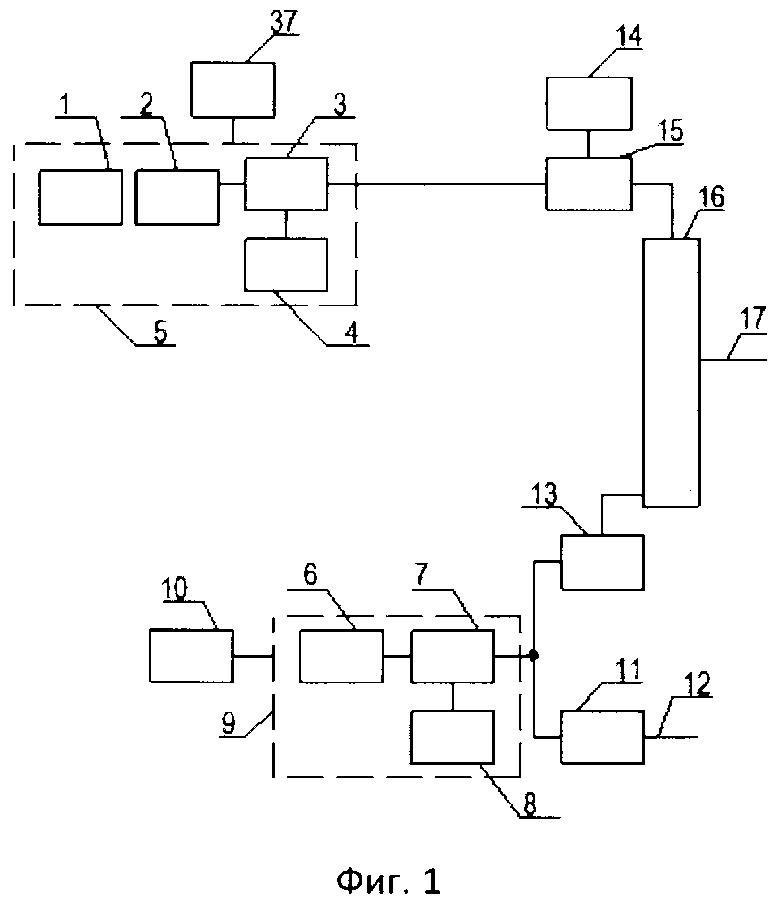
1. Многофункциональное устройство для измерения параметров магнитного поля, содержащее датчик магнитного поля, состоящий из полупроводникового элемента Холла с квадратурной коммутацией выводов, дифференциального операционного усилителя с программируемым коэффициентом усиления и подавлением напряжения смещения и регистром управления коэффициентом усиления, своими входами присоединенного к сигнальным выходам коммутатора элемента Холла; с целью подавления зависимости выходного сигнала от напряжения питания датчики магнитного поля и дифференциальный операционный усилитель запитаны от стабилизатора напряжения, выход датчика магнитного поля присоединен к входу выходного буферного усилителя, а выход буферного усилителя через мультиплексор выходных сигналов присоединен к выходным выводам устройства, состоянием мультиплексора выходных сигналов управляет регистр конфигурации устройства; также содержащее последовательный интерфейс с выходными линиями, позволяющий пользователям устройства производить запись данных во встроенную ПЗУ микроконтроллера, содержащего также арифметическо-логическое устройство, оперативную регистровую память и программно-управляемый тактовый генератор, отличающееся тем, что с целью получения нескольких передаточных характеристик по чувствительности выходной буферный усилитель является одновременно и усилителем с программируемым коэффициентом усиления, управляемым регистром.
2. Многофункциональное устройство для измерения параметров магнитного поля по п. 1, отличающееся тем, что с целью смещения начала и конца диапазона измерения магнитного поля между датчиком магнитного поля и буферным усилителем включен аналоговый сумматор, ко второму входу которого присоединен цифроаналоговый преобразователь,управляемый регистром, определяющим значение величины смещения начала и конца диапазона измерения магнитного поля.
3. Многофункциональное устройство для измерения параметров магнитного поля по п. 2, отличающееся тем, что с целью компенсации линейной составляющей температурной зависимости передаточной характеристики микросхемы в состав устройства введен температурный датчик с линейной температурной зависимостью, через присоединенный аналоговый сумматор-перемножитель, управляемый с помощью регистра, к источнику опорного напряжения стабилизатора.
4. Многофункциональное устройство для измерения параметров магнитного поля по п. 3, отличающееся тем, что с целью получения релейной (пороговой) зависимости выходного напряжения от величины магнитного поля к выходу датчика присоединен первый вход компаратора напряжения, а ко второму входу компаратора присоединен выход цифроаналогового преобразователя, выходное значение которого определяется посредством регистра, определяющего значение величины порога переключения релейной характеристики, а выход компаратора через мультиплексор выходных сигналов, управляемый регистром конфигурации, в том числе управляющим и знаком выходной функции релейной передаточной характеристики, присоединен к выходу устройства.
5. Многофункциональное устройство для измерения параметров магнитного поля по п. 4, отличающееся тем, что с целью получения двухпороговой релейной зависимости выходного напряжения от величины магнитного поля к выходу датчика присоединен второй компаратор, аналогичный первому, а ко второму входу второго компаратора присоединен выход цифроаналогового преобразователя, выходное значение которого определяется посредством регистра, определяющего значение величины второго порога переключения релейной характеристики, а выход второго компаратора через мультиплексор выходных сигналов, управляемый регистром конфигурации, в том числе управляющим видом и знаком выходной функции релейной передаточной характеристики, присоединен к выходу устройства.
6. Многофункциональное устройство для измерения параметров магнитного поля по п. 4, отличающееся тем, что с целью реализации квадратурного (инкрементного) датчика перемещения в устройство введен второй датчик магнитного поля, аналогичный первому, и топологически отнесен от первого датчика на максимально возможное расстояние, выход которого присоединен к первому входу второго компаратора, выходы обоих компараторов присоединены к мультиплексору выходных сигналов через логическую схему, реализующую алгоритм квадратурного или инкрементного датчика движения в зависимости от командного слова регистра конфигурации, и в том числе назначающего выходы устройства для выдачи квадратурных сигналов.
7. Многофункциональное устройство для измерения параметров магнитного поля по п. 1, отличающееся тем, что с целью повышения точности работы устройства к выходу датчика магнитного поля подключен вход аналогово-цифрового преобразователя, выход которого поступает на вход арифметическо-логического устройства (АЛУ), в котором происходит температурная компенсация, линеаризация и нормализация значений величины магнитного поля измеренных датчиком путем вычисления полинома от двух входных переменных, температуры и измеренного значения, к входам АЛУ также подключен выход второго входа аналогово-цифрового преобразователя, на вход которого поступает сигнал, измеренный вторым датчиком температуры, вычисленное значение измеренного магнитного поля через цифроаналоговый преобразователь поступает на выходной мультиплексор и далее на выход устройства.
8. Многофункциональное устройство для измерения параметров магнитного поля по п. 7, отличающееся тем, что с целью передачи данных по цифровым линиям связи выходные данные от АЛУ перенаправляются в выходные регистры последовательного интерфейса и далее в соответствии с протоколом интерфейса, выбранного регистром конфигурации, поступают на выход микросхемы.
| 0 |
|
SU93539A1 | |
| US 2017102438 A1, 13.04.2017 | |||
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННО НЕОДНОРОДНОГО ПОСТОЯННОГО ИЛИ МЕНЯЮЩЕГОСЯ ВО ВРЕМЕНИ МАГНИТНОГО ПОЛЯ | 2013 |
|
RU2548931C1 |
| WO 2017030772 A1, 23.02.2017. | |||

