Устройства на принципах молекулярно-электронного переноса широко применяются в качестве чувствительных элементов для измерения механических параметров, линейных и угловых перемещений. Известны устройства на основе молекулярно-электронной ячейки определяющие относительные углы наклонов, линейные и угловые скорости движения различных объектов [1, 2], линейные и угловые ускорения поверхностей [3]. В то же время возможности применения технологии молекулярно-электронного переноса были продемонстрированы в работе [4] для регистрации акустических полей в жидких и газообразных средах, иными словами, в качестве датчика регистрации вариаций давления - гидрофонов.
Истоки технологии молекулярно-электронного переноса восходят к работам [5], получившей дальнейшее развитие в работах [6, 7] и ряда современных авторов [8, 9]. Основные преимущества технологии заключаются в высоком коэффициенте преобразования внешнего возмущающего сигнала в электрический ток, низком энергопотреблении, низких собственных шумах первичных преобразователей сигнала.
Суть технологии заключается в использовании объема проводящей жидкости (электролита) в качестве инерциальной массы измерителя и одновременно преобразующей среды потока жидкости через электроды в ток во внешней электрической цепи. В электролит погружена специальная электродная ячейка (молекулярно-электронная ячейка) [10, 11], конструкция которой определяет во многом технические параметры первичного преобразователя, на электроды которой подается либо разность потенциалов, либо пропускается электрический ток, в зависимости от задач, реализуемых посредством электродов. Состав электролита, его количество и особенности механической системы, частью которой он является, также определяют технические параметры измерительного устройства и тип измеряемого сигнала. Несмотря на традиционные области применения использование жидкости в качестве преобразующей среды позволяет освоить еще одно направление - измерение вариаций давления. Поскольку электролит - слабо сжимаемая жидкость, можно построить механическую систему, которая будет обеспечивать протекание объема электролита через преобразующий узел из электродов и формирование сигнального тока, пропорционально приходящим извне вариациям давления. В работе [12] были продемонстрированы результаты разработки мелководного гидрофона с воздушной камерой до глубин порядка 30 метров (3 атм) и показано, что молекулярно-электронный гидрофон будет обладать очень высокой чувствительностью и низким уровнем собственных шумов, традиционным преимуществам молекулярно-электронной технологии, однако изменения общей жесткости системы, которое происходит с глубиной погружения меняет чувствительность устройства, и даже введение силовой электромагнитной обратной связи может скомпенсировать эти изменения чувствительности лишь в ограниченном диапазоне флуктуаций статического давления (+/- 1 атм). В тоже время, многие области применений требуют значительно больших глубин погружения. К примеру, в сейсморазведке нашли применение донные косы и донные автономные станции. Чаще всего они используются на шельфе, где максимальная глубина погружения составляет 500+ метров. Есть потребность и в гидрофонах, работающих на больших глубинах. В то же время, возрастающее статическое давление существенно усложняет предлагаемую в [12] конструкцию устройства, требуя прочного корпуса, компенсации давления со стороны чувствительного элемента и т.д. А также определенную техническую сложность составляет поддержание неизменного значения константы электромагнитного взаимодействия катушки с током и магнита, являющихся основой электромагнитной силовой обратной связи в предлагаемой конструкции, поскольку само устройство такой ОС предполагает одну из составных частей (катушка или магнит) привязанных к «движению» электролита, что при возрастающем статическом давлении приводит к значительным смещениям от установочных значений константы взаимодействия.
Таким образом, основными недостатками известного технического решения являются в глобальном смысле нелинейность масштабного коэффициента преобразования в зависимости от глубины погружения, принципиальная невозможность предлагаемого технического решения измерять вариации волнового поля при значительных (более 10 атм.) статических давлениях, изменение коэффициента электромагнитного взаимодействия системы электромагнитной ОС с глубиной погружения, а также необходимость прочных конструкций корпуса и высокая степень герметичности соединений деталей корпуса и разъемов.
Наиболее близкими аналогами предлагаемого изобретения являются технические решения, изложенные в работах [13, 14] и [12], в которых приведены основные принципы применения молекулярно-электронной технологии для измерения вариаций давления, а также технические решения по организации силовой ОС для стабилизации параметров преобразователей.
В качестве прототипа к заявляемому техническому решению по совокупности признаков возьмем малогабаритный молекулярно-электронный акселерометр с электромагнитной отрицательной обратной связью, подробно описанный в [13]. Применим к прототипу устройства принципы сформулированные в [12] для возможности регистраций первичным преобразователем малых вариаций давления.
Задачей изобретения при этом является модернизация конструкций известных устройств, обеспечивающая реализацию принципа работы прямого измерения малых вариаций давления в среде с повышенным вплоть до 70 атм. относительно атмосферного статическим давлением.
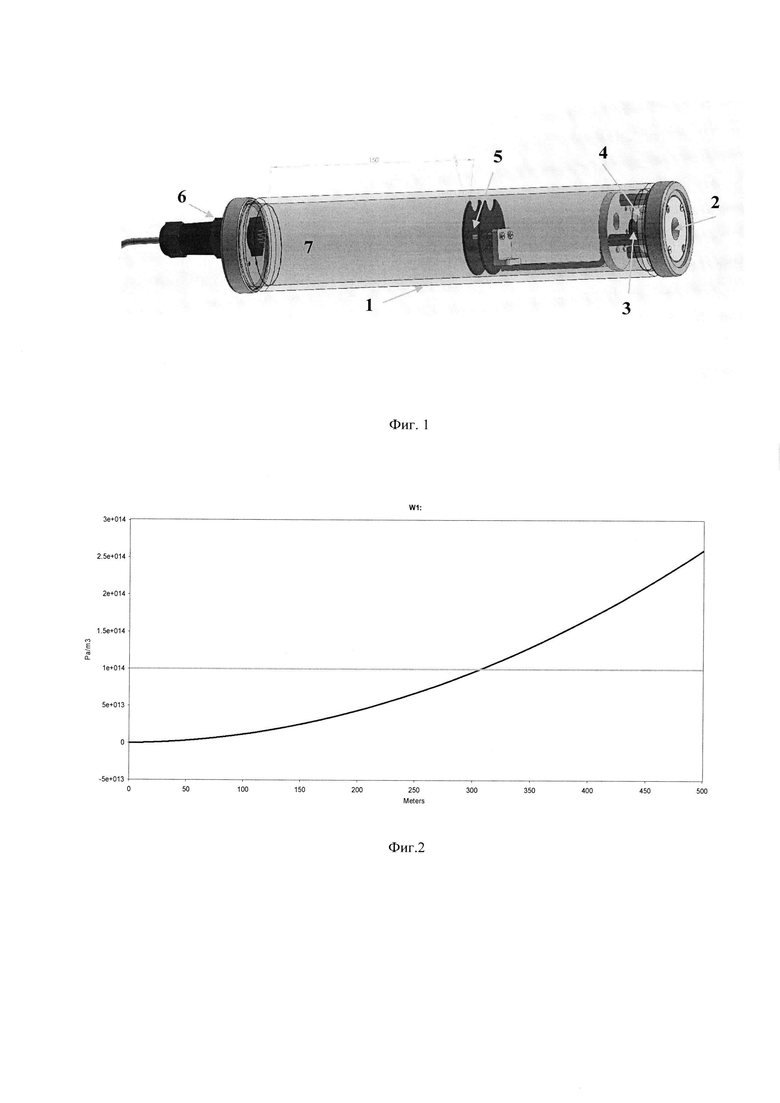
Поставленная задача реализуется следующим образом. Молекулярно-электронный преобразователь, содержащий электродную ячейку из четырех платиновых электродов, две мембраны, ограничивающие канал с электролитом, помещается в жесткий герметичный корпус, таким образом что одна из мембран преобразователя выводится наружу и имеет непосредственный контакт с окружающей средой. Внутри корпуса размещаются электронные цепи преобразования сигнала, схемы питания, внутренние пины выводных разъемов и любые другие элементы для функционирования системы, при этом вторая мембрана преобразователя располагается внутри корпуса и обращена во внутренний объем. К внутренней мембране приклеен магнит, обеспечивающий контакт с движущимся под действием вариаций давления электролитом в преобразователе. Внутри корпуса жестко прикреплена катушка, так что магнит, может беспрепятственно перемещаться внутри катушки. Весь объем корпуса технического решения заполняется непроводящей легкосжимаемой жидкостью на основе кремнийорганических соединений, например полиметилсилоксановой или полидиметилсилоксановой жидкостью без воздушных пузырей, см. Фиг. 1.
Сжимаемость жидкости большая, чем у воды обеспечивает функционирование технического решения в виде измерителя вариаций давления, а объемом корпуса и соответственно количеством сжимаемой жидкости в нем можно регулировать общую жесткость системы пропорциональную P/V, где Р - статическое давление, V - объем сжимаемой жидкости.
Сжимаемость жидкостей характеризуется коэффициентом сжимаемости  или обратной ей величиной
или обратной ей величиной  - изотермическим модулем упругости. Из распространенных в технике жидкостей наибольшей сжимаемостью характеризуются именно силиконовые жидкости. Для них характерное значение Е=109 Па. Это значит, что для объема V=800 см3 нижняя граничная частота механической системы составит порядка 1 Гц. Принципиальное отличие в поведении жесткости упругого элемента механической системы при использовании воздушной камеры как в [12] от объема корпуса, заполненного силиконом, иллюстрирует Фиг. 2, показывающий как изменяется объемная жесткость системы при погружении гидрофона. При расчете использованы следующие численные значения: V0=1 см3 - объем воздушного пузыря при атмосферном давлении, V=10 см3 - объем сжимаемой жидкости.
- изотермическим модулем упругости. Из распространенных в технике жидкостей наибольшей сжимаемостью характеризуются именно силиконовые жидкости. Для них характерное значение Е=109 Па. Это значит, что для объема V=800 см3 нижняя граничная частота механической системы составит порядка 1 Гц. Принципиальное отличие в поведении жесткости упругого элемента механической системы при использовании воздушной камеры как в [12] от объема корпуса, заполненного силиконом, иллюстрирует Фиг. 2, показывающий как изменяется объемная жесткость системы при погружении гидрофона. При расчете использованы следующие численные значения: V0=1 см3 - объем воздушного пузыря при атмосферном давлении, V=10 см3 - объем сжимаемой жидкости.
Из представленного графика видно, что на малых глубинах воздушный объем имеет меньшую жесткость, которая, однако, заметно возрастает с глубиной, в отличие от жесткости объема, заполненного кремнийорганической жидкостью. Таким образом, для глубоководного гидрофона использование кремнийорганической жидкости существенно оправдано. Это тем более важно потому, что общая деформации мембран преобразователя при погружении гидрофона будет малозначительной, что означает существенно меньшую зависимость чувствительности гидрофона от глубины погружения.
Заявленное техническое решение позволяет проводить прямое измерение малых вариаций давления, появляющихся в результате распространения волн сжатия разряжения в жидких и газообразных средах на фоне существенных статических давлений вплоть до 70 атм. (700 метров) Малая сжимаемость относительно воздуха и хорошая гидрофобность кремнийорганических непроводящих жидкостей позволяет использовать простой жесткий корпус, поскольку статическое давление внутри и снаружи корпуса будет скомпенсировано, а отталкивающий эффект не позволит наружной воде проникать через различные сочленения корпуса. Кроме того, применение жидкости вместо воздушного пузыря позволит избежать эффекта изменения константы электромагнитного взаимодействия магнита и катушки с током в системе обратной связи и повысит устойчивость системы.
Краткое описание графических материалов, поясняющих сущность изобретения.
Фиг. 1 - Конструкция глубоководного молекулярно-электронного гидрофона. 1 - жесткий корпус; 2 -мембрана чувствительного элемента, имеющая непосредственный контакт со средой; 3 - катушка; 4 - магнит, приклеенный ко второй мембране преобразователя; 5 - электронная плата; 6 - герморазъем, 7 - кремнийорганическая непроводящая, легкосжимаемая жидкость.
Фиг. 2 - Изменение объемной жесткости  с глубиной для воздушного объема и сжимаемой жидкости. Синяя кривая - объемная жесткость воздушного пузыря, Зеленая кривая - объемная жесткость объема кремнийорганической жидкости
с глубиной для воздушного объема и сжимаемой жидкости. Синяя кривая - объемная жесткость воздушного пузыря, Зеленая кривая - объемная жесткость объема кремнийорганической жидкости
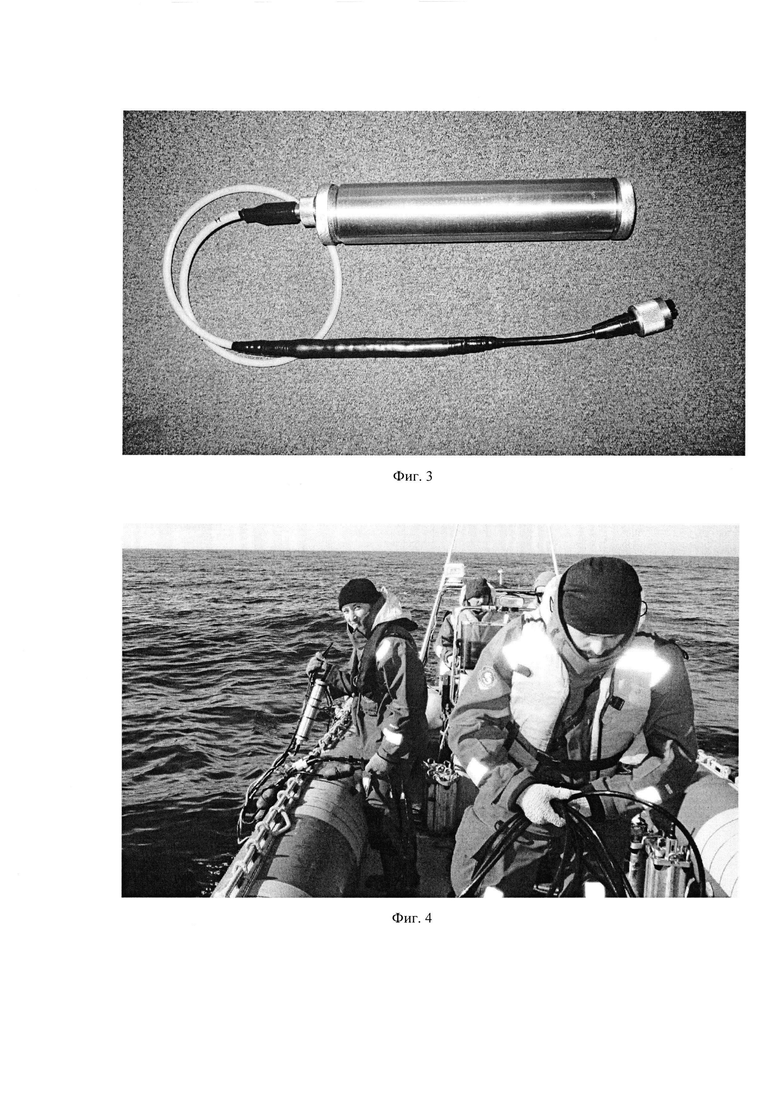
Фиг. 3 - Пример практической реализации изобретения
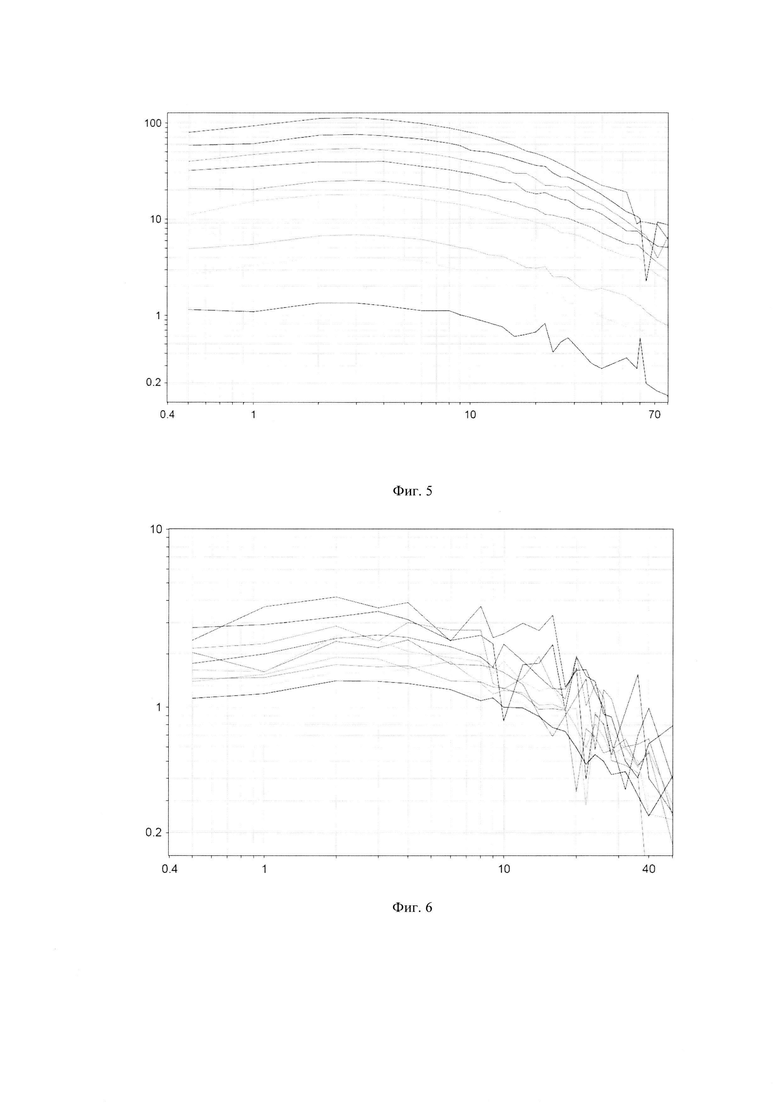
Фиг. 4 - Натурные эксперименты с примером практической реализации изобретения
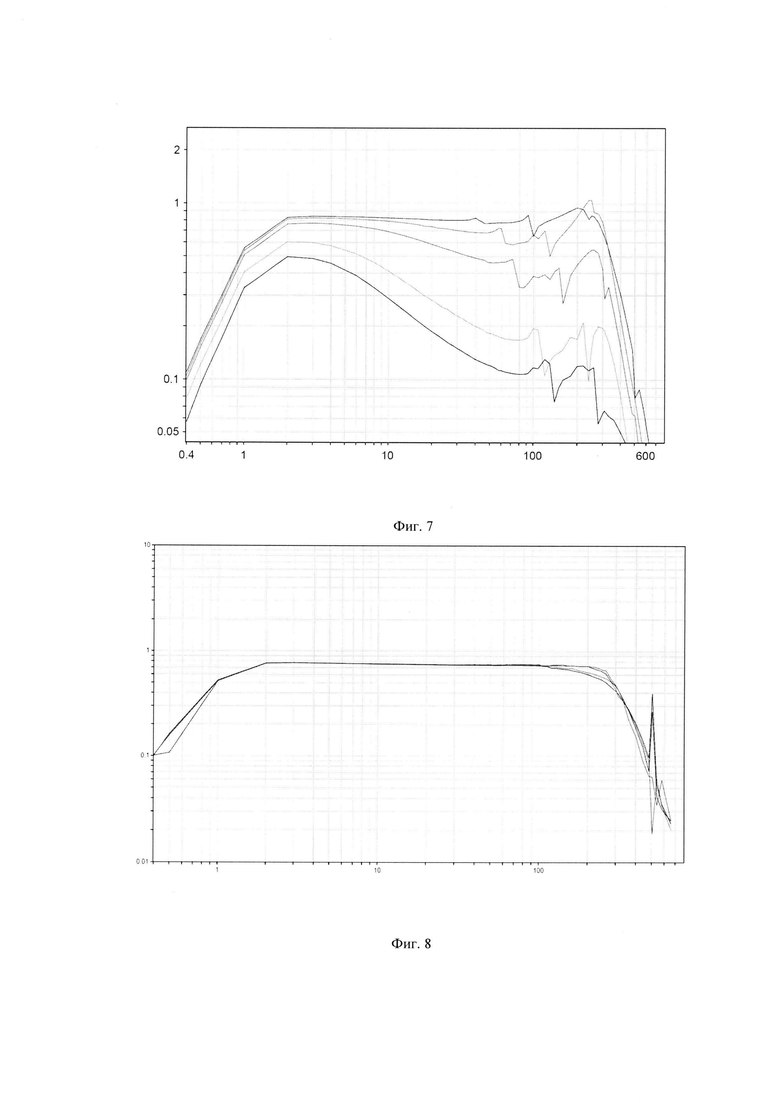
Фиг. 5 - Семейство амплитудно-частотных характеристик прототипа изобретения с воздушной камерой от глубины погружения, по оси ординат - относительные единицы, по оси абсцисс - частота.
Фиг. 6 - Семейство амплитудно-частотных характеристик технической реализации изобретения от глубины погружения, по оси ординат - относительные единицы, по оси абсцисс - частота.
Фиг. 7 - Семейство амплитудно-частотных характеристик прототипа изобретения с воздушной камерой от глубины погружения в единицах k⋅в, в натурном эксперименте. По оси ординат - относительные единицы, по оси абсцисс - частота.
Фиг. 8 - Семейство амплитудно-частотных характеристик технической реализации изобретения от глубины погружения в единицах k⋅в, в натурном эксперименте. По оси ординат - относительные единицы, по оси абсцисс - частота.
Пример реализации технического решения представлен на Фиг. 3. и собран в соответствии с описанием изобретения.
В жесткий металлический корпус вмонтирован молекулярно-электронный преобразователь, одна из мембран которого выходит наружу корпуса и имеет непосредственный контакт со средой, внутри корпуса располагаются электрические схемы и цепи питания молекулярно-электронного преобразователя, объем корпуса заполняется полиметилсилоксановой жидкостью с наименьшей вязкостью (ПМС-5), без воздушных пузырей в объеме. Вторая мембрана также расположена внутри корпуса, обращена во внутренний объем, при этом к ней приклеен магнит, обеспечивающий контакт с движущимся под действием вариаций давления электролитом в преобразователе. Внутри корпуса жестко прикреплена катушка таким образом, что магнит может беспрепятственно перемещаться внутри катушки. С обратной стороны выводится разъем питания и сигнальные выводы гидрофона. Пример реализации был испытан на гидробаростенде в лабораторных условиях, а также подвергался измерению амплитудно-частотных характеристик методом самокалибровки в естественных условиях моря Фиг. 4. В лаборатории были измерены АЧХ примера реализации в абсолютных единицах по отношению к референсному гидрофону гидробаростенда ВС-311 ZetLab, измерению подвергались некоректированные фильтрами данные чувствительностей гидрофона. Для сравнения аналогичный преобразователь был испытан в стандартной схеме гидрофона согласно прототипу из [12] с воздушной камерой над второй мембраной преобразователя. Чувствительность референсного гидрофона составляла 0.039 мВ/Па, графики приведены в относительных к чувствительности референса единицах. На Фиг. 5 и 6 представлены семейства амплитудно-частотных характеристик от глубины погружения для нескорректированного фильтрами молекулярно-электронноного гидрофона с воздушным пузырем, как в [12], и практической реализации молекулярно-электронного глубоководного гидрофона соответственно. С увеличением статического давления чувствительность прототипа снижается, демонстрируя явную зависимость частотного отклика от величины статического давления. Из сравнения Фиг. 5 и Фиг. 6 видно существенное снижение зависимости чувствительности практической реализации изобретения по сравнению с чувствительностью прототипа изобретения к глубине погружения. В то же время увеличение общей жесткости системы за счет использования сжимаемой жидкости вместо воздушного пузыря снижает чувствительность практической реализации изобретения примерно на порядок, оставляя ее, тем не менее, на существенно высоком уровне, сравнимом с чувствительностью референсного пьезоэлектрического гидрофона.
Дальнейшее испытание практической реализации и прототипа было выполнено в натурных условиях моря. Для этого на экспериментальных образцах прототипа и примера технической реализации изобретения замыкалась отрицательная обратная связь и включались цепи усиления и фильтрации в полосе 1-500 Гц. Гидрофоны погружались на различные глубины, на каждой из которых снимались амплитудно-частотная характеристика методом самокалибровки, подробно описанном в [12], в единицах k⋅β (где k - коэффициент преобразования датчика и электроники прямой цепи перепада давления в напряжение, β - коэффициент преобразования обратной связи, включая электромагнитное взаимодействие магнита с катушкой и электрическую схему, формирующую сигнал обратной связи). На Фиг. 7 и Фиг. 8 представлено семейство амплитудно-частотных характеристик коэффициента преобразования от внешнего статического давления (глубины погружения) в идентичных единицах k⋅β для прототипа гидрофона и практической реализации изобретения соответственно. Из сравнения Фиг. 7 и Фиг. 8 видно существенно улучшенная стабильность k⋅β с глубиной погружения у примера реализации изобретения.
Анализ Фиг. 5 - Фиг. 8 подтверждает также ожидаемый эффект отсутствия изменения параметров константы электромагнитного взаимодействия (прямо пропорционального параметру β) для практической реализации изобретения по сравнению с прототипом.
ИСТОЧНИКИ ИНФОРМАЦИИ.
1. Патент РФ 159822
2. Патент РФ 2650839
3. Патент РФ 2578049
4. D. Zaitsev, V. Agafonov, Е. Egorov and S. Avdyukhina Broadband MET Hydrophone. 80th EAGE Conference and Exhibition 2018. Session: Seismic Acquisition. 11 June 2018
5. R.M. Hurd and R.N. Lane, "Principles of Very Low Power Electrochemical Control Devices", J. Electrochem. Soc. vol. 104, p. 727-730 (1957)
6. Larkam C.W. // J. Acoust. Soc.Amer. 1965. V. 37. №4. P. 664.
7. Введение в молекулярную электронику /Под ред. Н.С. Лидоренко М.: Энергоатомиздат, 1984.
8. Newman J., Thomas-Alyea K.Е. Electrochemical Systems. Hoboken: John Wiley & Sons, Inc., 2004
9. Криштоп В.Г., Агафонов B.M., Бугаев A.C. //Элек-трохимия. 2012. Т. 48. №7. С. 820
10. Патент РФ 2394246 И. Патент РФ 2444738
12. Zaitsev, D.L., Avdyukhina, S.Y., Ryzhkov, M.A., Evseev, I., Egorov, E.V., and Agafonov, V.M.: Frequency response and self-noise of the MET hydrophone, J. Sens. Sens. Syst., 7, 443-452, https://doi.org/10.5194/jsss-7-443-2018, 2018
13. B.M. Агафонов, И.В. Егоров, A.C. Шабалина «Принципы работы и технические характеристики малогабаритного молекулярно-электронного сейсмодатчика с отрицательной обратной связью» Сейсмические приборы. 2013. Т. 49, №1, с. 5-18
14. Ivan V. Egorov, Anna S. Shabalina, and Vadim M. Agafonov Design and Self-Noise of MET Closed-Loop Seismic Accelerometers IEEE SENSORS JOURNAL, VOL. 17, NO. 7, APRIL 1, 2017
| название | год | авторы | номер документа |
|---|---|---|---|
| МОЛЕКУЛЯРНО-ЭЛЕКТРОННЫЙ ГИДРОФОН С КОМПЕНСАЦИЕЙ СТАТИЧЕСКОГО ДАВЛЕНИЯ | 2019 |
|
RU2724296C1 |
| Молекулярно-электронный гидрофон с обратной связью на основе магнитогидродинамического эффекта | 2018 |
|
RU2698527C1 |
| ЦИФРОВОЙ РЕГИСТРИРУЮЩИЙ МОДУЛЬ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2019 |
|
RU2724964C1 |
| Молекулярно-электронный гидрофон | 2017 |
|
RU2678503C1 |
| Способ изготовления молекулярно-электронной ячейки низкошумящего широкополосного гидрофона для донных исследований | 2018 |
|
RU2703488C1 |
| Низкочастотная двухкомпонентная донная сейсмическая коса | 2017 |
|
RU2687297C1 |
| Способ обеспечения температурной стабильности параметров молекулярно-электронного преобразователя в области высоких частот | 2019 |
|
RU2724303C1 |
| Низкочастотный векторный акустический приемник | 2016 |
|
RU2650839C1 |
| Способ увеличения коэффициента преобразования молекулярно-электронного датчика движения | 2017 |
|
RU2659459C1 |
| Лазерно-интерференционный гидрофон | 2020 |
|
RU2742935C1 |
Изобретение относится к измерительной технике, в частности к прямому измерению параметров волн сжатия - разряжения, распространяющихся в жидких и газообразных средах, которые могут характеризоваться повышенным относительно нормальных условий статическим давлением в среде. Изобретение может найти применение в таких областях, как шельфовая сейсморазведка полезных ископаемых, строительство подводных коммуникаций и прокладка трубопроводов, может быть использовано для исследовательских, промысловых и навигационных нужд в условиях глубокого моря. Заявлен гидрофон, предназначенный для измерения вариаций давления в акустической волне на фоне внешнего статического давления, состоящий из корпуса и преобразователя, представляющего собой камеру, заполненную электролитом и разделенную на две части электродной ячейкой. Оболочка камеры содержит две мембраны, расположенные по различным сторонам от преобразующего элемента. Причем указанный преобразователь размещен так, что одна из указанных мембран находится в контакте со средой, в которой распространяются акустические волны, а другая мембрана находится в контакте с легкосжимаемой жидкостью, заполняющей корпус гидрофона. Технический результат - повышение чувствительности устройства, снижение уровня собственных шумов, особенно в низкочастотной области. 3 з.п. ф-лы, 8 ил.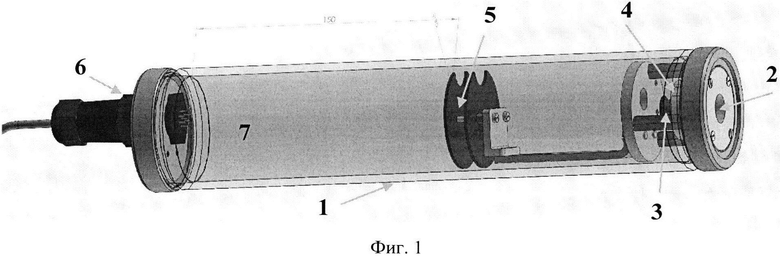
1. Гидрофон, предназначенный для измерения вариаций давления в акустической волне на фоне внешнего статического давления, состоящий из корпуса и преобразователя, представляющего собой камеру, заполненную электролитом и разделенную на две части электродной ячейкой, оболочка камеры содержит две мембраны, расположенные по различным сторонам от преобразующего элемента, отличающийся тем, что указанный преобразователь размещен так, что одна из указанных мембран находится в контакте со средой, в которой распространяются акустические волны, а другая мембрана находится в контакте с легкосжимаемой жидкостью, заполняющей корпус гидрофона.
2. Гидрофон по п. 1, отличающийся тем, что в качестве легкосжимаемой непроводящей жидкости используются кремнийорганические жидкости типа полиметилсилоксановой или полидиметилсилоксановой различной вязкости.
3. Гидрофон по п. 1, отличающийся тем, что для стабилизации параметров введена отрицательная обратная связь.
4. Гидрофон по п. 1, отличающийся тем, что способен измерять малые вариации давления на фоне значительных статических давлений.
| Агафонов В.М., Егоров И.В., Шабалина А.С | |||
| "Принципы работы и технические характеристики малогабаритного молекулярно-электронного сейсмодатчика с отрицательной обратной связью", Сейсмические приборы, 2013, Т | |||
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| ТРЕХКОМПОНЕНТНЫЙ ПРИЕМНИК АКУСТИЧЕСКИХ КОЛЕБАНИЙ | 1998 |
|
RU2128850C1 |
| Молекулярно-электронный измерительный преобразователь | 1985 |
|
SU1295343A1 |
| Трехкомпонентный симметричный скважинный сейсмоприемник | 1983 |
|
SU1288641A1 |
| Электрохимический сейсмоприемник | 1981 |
|
SU1015451A1 |
| CN 106597527 A, 26.04.2017. | |||

